
A Simple Curvature-Based Backward Path-Tracking Control for a Mobile Robot with N Trailers


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Vehicle Kinematic and Problem Statement
2.1. Kinematic Model
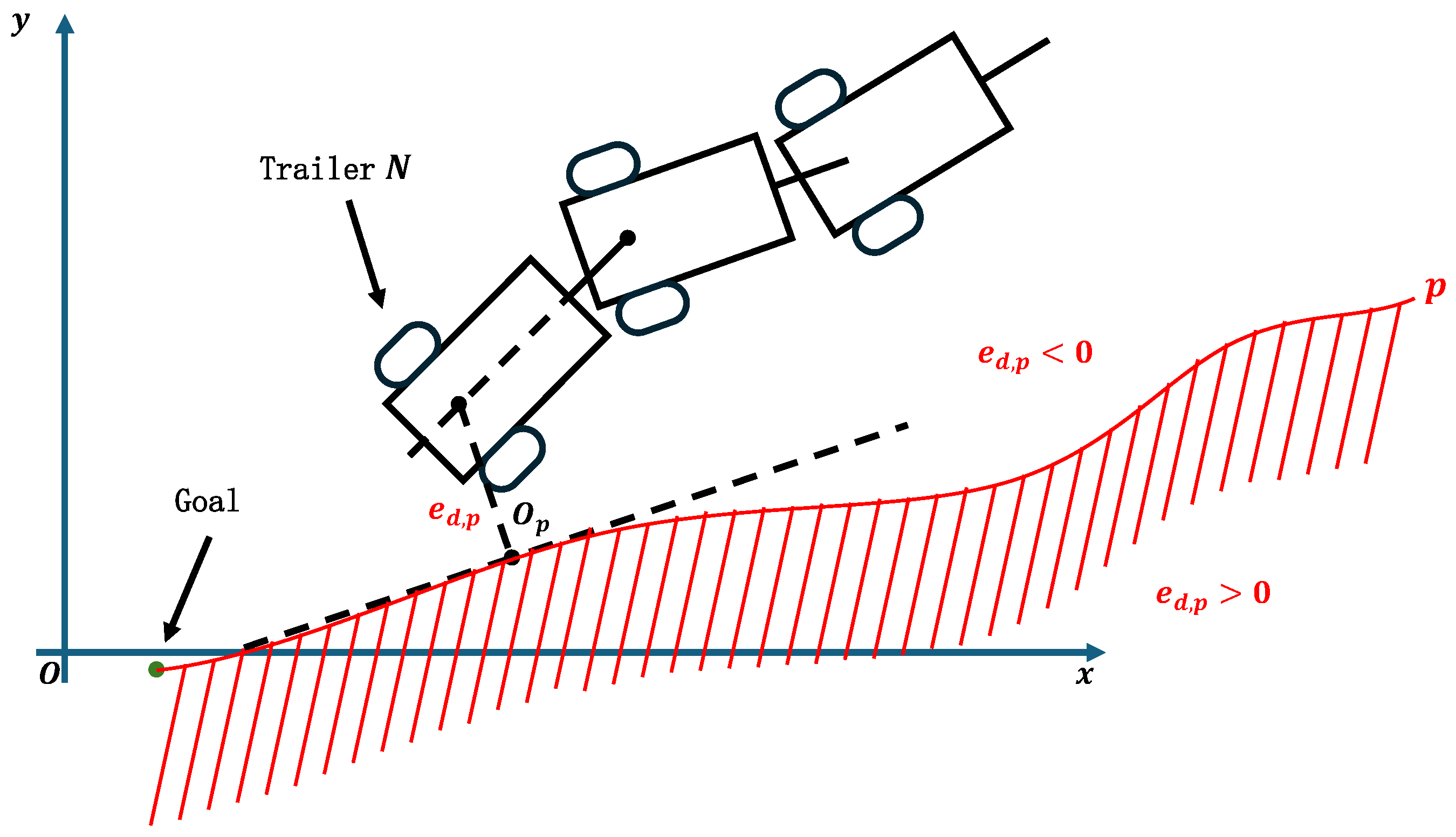
2.2. Preliminaries and Problem Formulation
3. Path-Tracking Control Law
3.1. Curvature-Tracking Control Law
3.2. Curvature Planning
3.3. Traction Velocity Determination
4. Results
4.1. Mobile Robot with One Trailer
- Segment I: A vertical line defined by and rad.
- Segment II: A horizontal line defined by with rad.
- Segment III: Another vertical line defined by with rad.
4.2. Mobile Robot with Three Trailers
- Segment I: A vertical line defined by and rad.
- Segment II: A horizontal line defined by with rad.
- Segment III: Another vertical line defined by with rad.
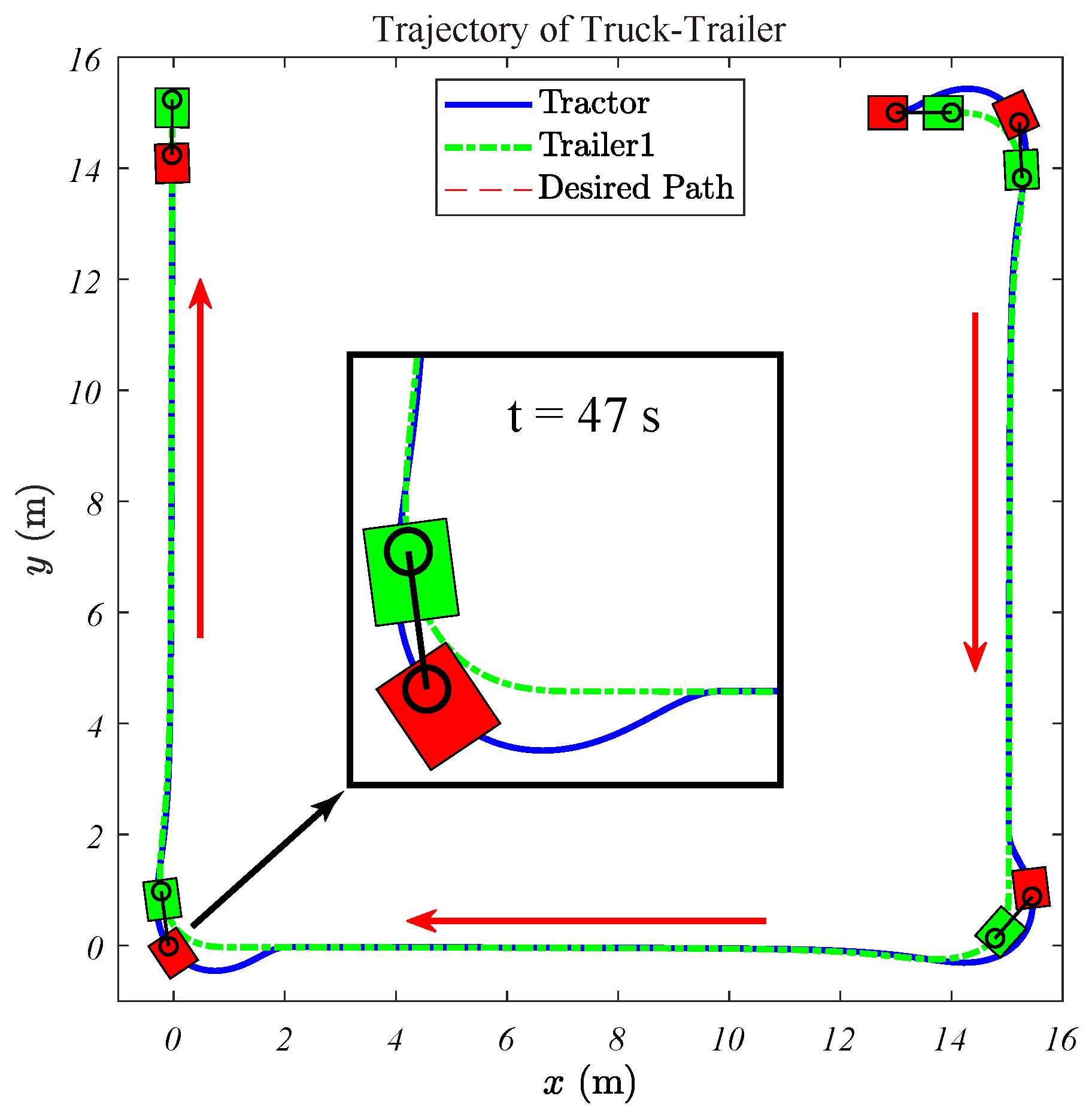
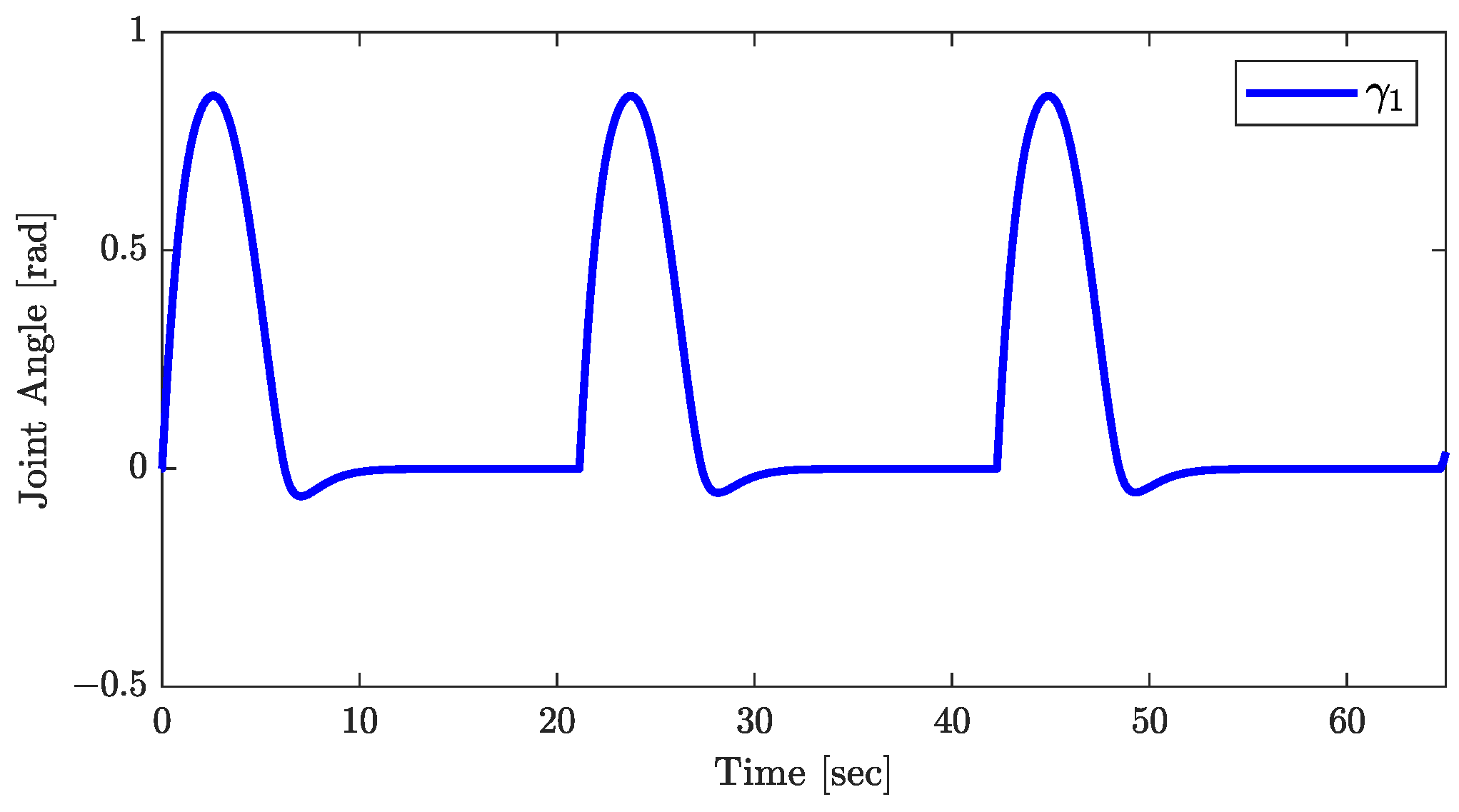
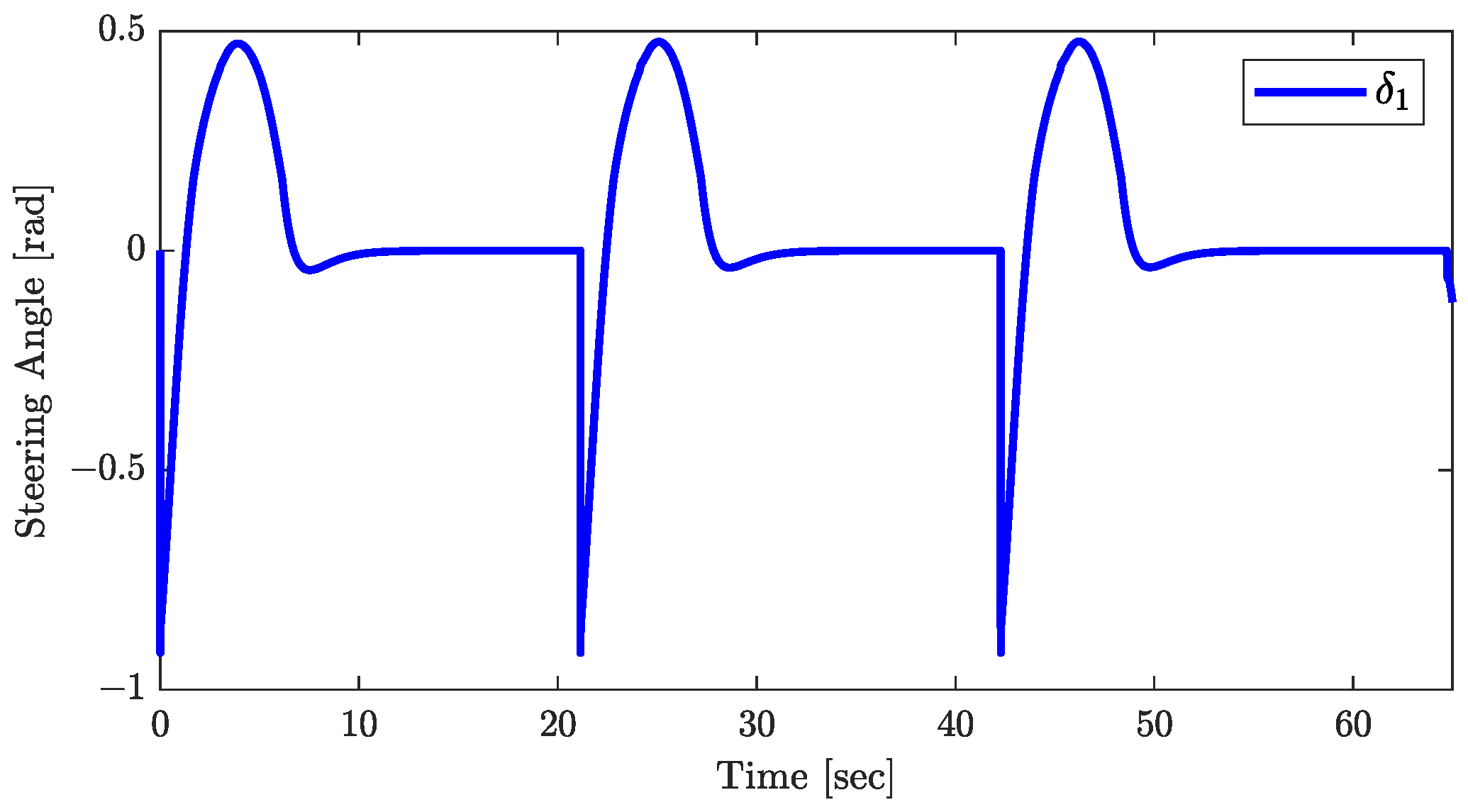
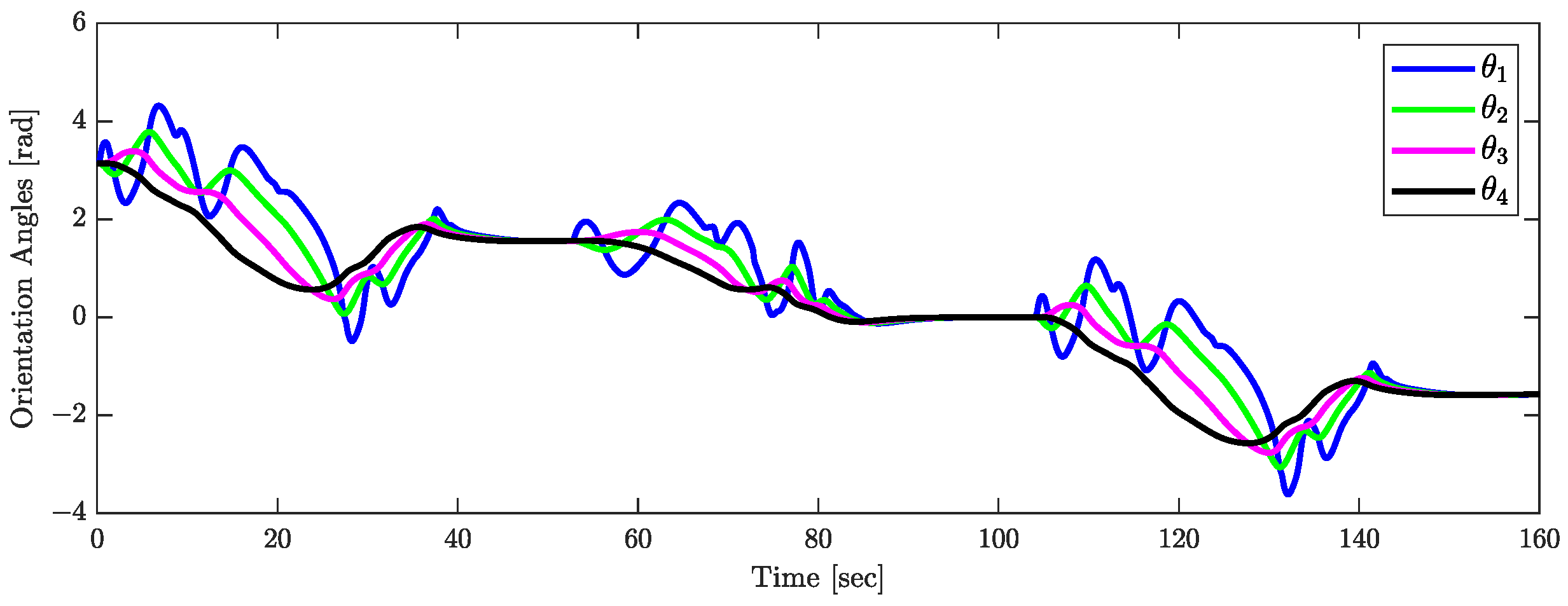
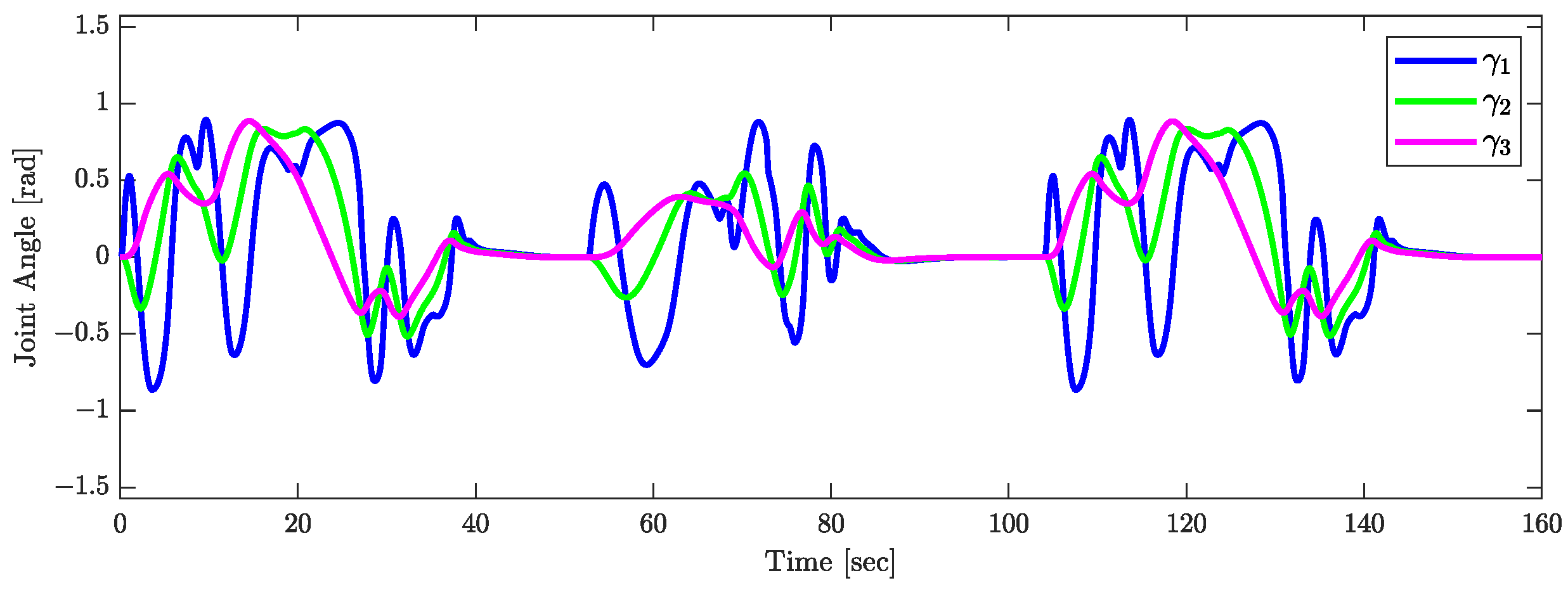
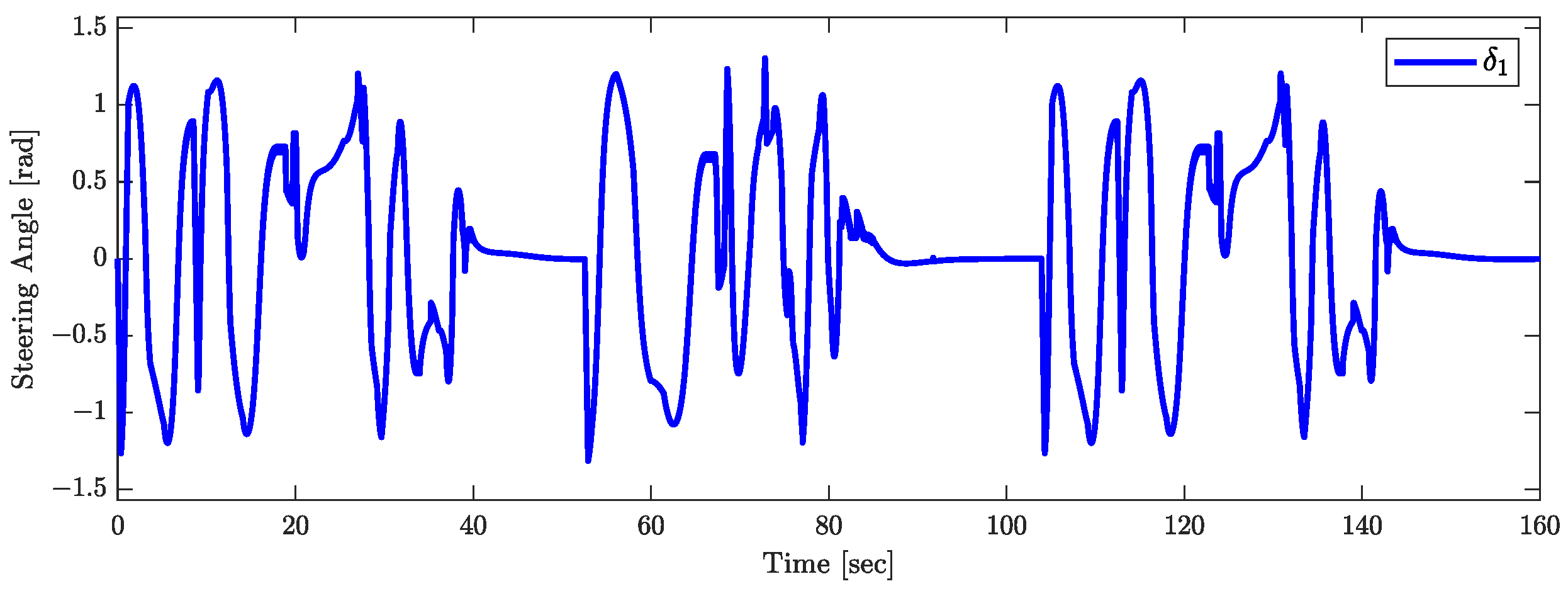
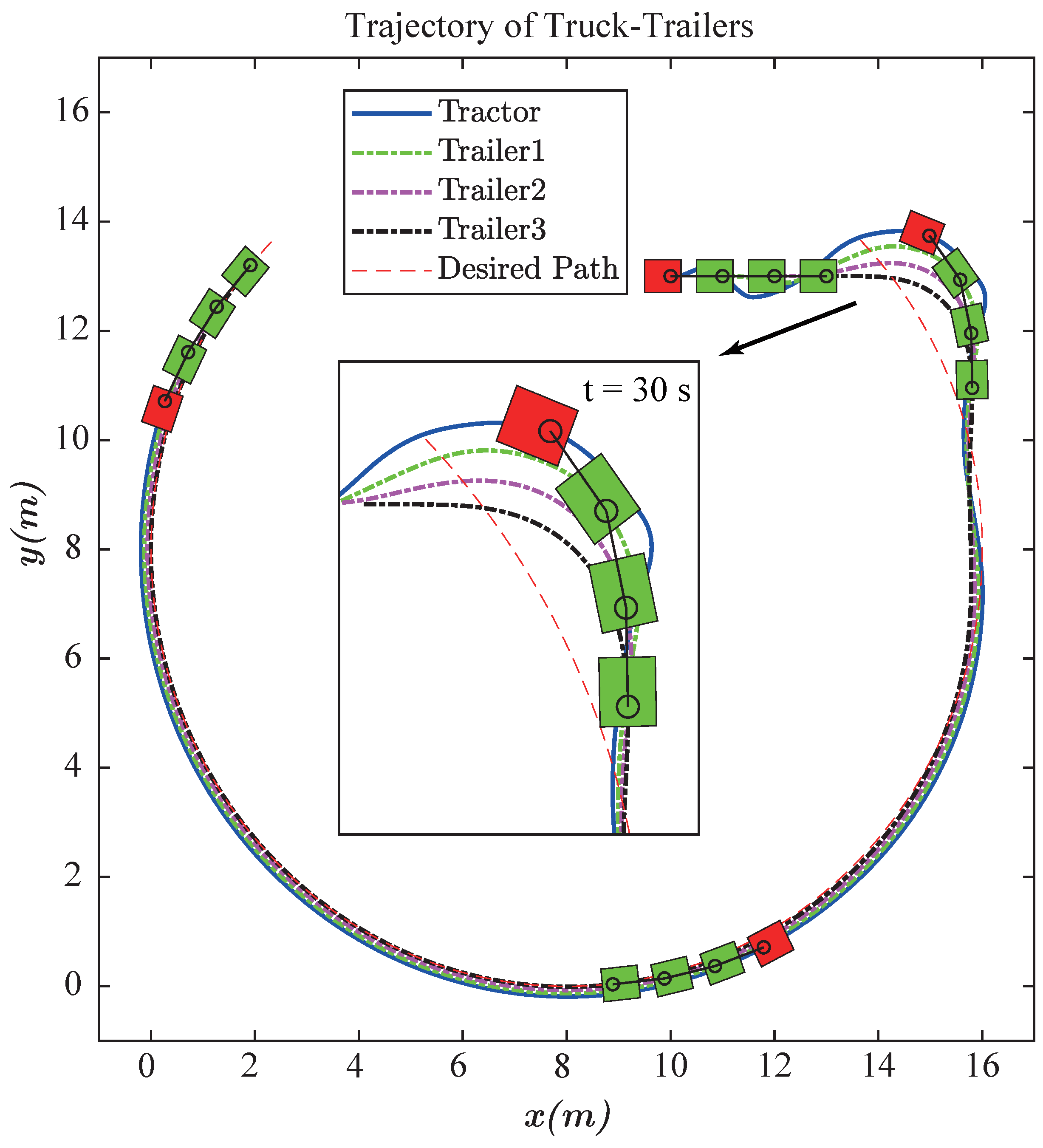
4.3. Simulation of Curve-Path Backward-Following Control
5. Discussion
- Path Tracking for N Trailers: This research specifically tackles the path-tracking control problem for mobile robots with N trailers, which is an area that remains largely unexplored in the current literature. While prior research has dealt with configurations involving fewer trailers, our study extends these methodologies to more complex systems with N trailers, thereby pioneering and filling a gap in this field.
- Recursive Feedback Controller Design: Although inspired by the techniques outlined in [22], our controller design introduces operational changes. The error function in our controller, expressed as , contrasts with the format used in Reference [1]. This modification simplifies the computational demands and enhances control performance, making our approach both innovative and practically efficient.
- Innovative Curvature-Planning Algorithm: We have developed a novel curvature-planning algorithm specifically designed for path tracking in systems with N trailers. This algorithm does not require the tracked path to be continuously differentiable, which significantly enhances the path-tracking capabilities of mobile robots.
- Environmental and Terrain Influences: While we have implemented essential constraints in our control algorithm for the truck-trailer system, its performance could deteriorate under complex conditions such as varying weather or uneven terrain. These factors can disrupt the kinetic and dynamic responses of the system, presenting challenges not currently addressed by our framework.
- Stability and Optimization: The stability of our control scheme was validated using Input-to-State Stability (ISS) theory, demonstrating its exponential stability. However, we did not optimize the design and tuning of the controller beyond this validation, which limits its robustness and efficiency under varying operational conditions.
- Decoupling of Kinematic and Dynamic Controls: Our strategy requires a decoupling of kinematic and dynamic controls, necessitating operation conditions where the kinematic system operates at a lower frequency than the dynamic system. However, this requirement may restrict the responsiveness and adaptability of the control system to rapid changes in dynamics or external disturbances.
- Experimental Validation: Although previous studies have validated the curvature-based controller for mobile systems with a single trailer [9,14,15], its application to N-trailer systems is introduced for the first time in this paper. Additionally, controllers developed through the recursive design approach are inherently complex. While this paper has demonstrated the effectiveness of this approach using ISS stability theory and simulations, further experimental validation is necessary to confirm its real-world performance.
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| RH | Reference head-truck |
| RT | Reference trailer |
| MPC | Model predictive controller |
| PID | Proportional–Integral–Derivative |
Appendix A
References
- David, J.; Manivannan, P.V. Control of truck-trailer mobile robots: A survey. Intell. Serv. Robot. 2014, 7, 245–258. [Google Scholar] [CrossRef]
- Martinez, J.L.; Morales, J.; Mandow, A.; Garcia-Cerezo, A. Steering Limitations for a Vehicle Pulling Passive Trailers. IEEE Trans. Control. Syst. Technol. 2008, 16, 809–818. [Google Scholar] [CrossRef]
- Khalaji, A.K.; Moosavian, S.A.A. Dynamic modeling and tracking control of a car with n n trailers. Multibody Syst. Dyn. 2016, 37, 211–225. [Google Scholar]
- Khalaji, A.K.; Moosavian, S.A.A. Robust forward\backward control of wheeled mobile robots. ISA Trans. 2021, 115, 32–45. [Google Scholar] [CrossRef]
- Khalaji, A.K.; A Moosavian, S.A. Adaptive sliding mode control of a wheeled mobile robot towing a trailer. Proc. Inst. Mech. Eng. Part I: J. Syst. Control. Eng. 2015, 229, 169–183. [Google Scholar] [CrossRef]
- Kassaeiyan, P.; Tarvirdizadeh, B.; Alipour, K. Control of tractor-trailer wheeled robots considering self-collision effect and actuator saturation limitations. Mech. Syst. Signal Process. 2019, 127, 388–411. [Google Scholar] [CrossRef]
- Bin Salamah, Y. Sliding Mode Controller for Autonomous Tractor-Trailer Vehicle Reverse Path Tracking. Appl. Sci. 2023, 13, 11998. [Google Scholar] [CrossRef]
- Zhao, H.; Zhou, S.; Chen, W.; Miao, Z.; Liu, Y.H. Modeling and motion control of industrial tractor–trailers vehicles using force compensation. IEEE/ASME Trans. Mechatron. 2021, 26, 645–656. [Google Scholar] [CrossRef]
- Leng, Z.; Minor, M.A. Curvature-Based Ground Vehicle Control of Trailer Path Following Considering Sideslip and Limited Steering Actuation. IEEE Trans. Intell. Transp. Syst. 2016, 18, 332–348. [Google Scholar] [CrossRef]
- Widyotriatmo, A.; Nazaruddin, Y.Y.; Putranto, M.R.F.; Ardhi, R. Forward and backward motions path following controls of a truck-trailer with references on the head-truck and on the trailer. ISA Trans. 2020, 105, 349–366. [Google Scholar] [CrossRef]
- Kassaeiyan, P.; Alipour, K.; Tarvirdizadeh, B. A full-state trajectory tracking controller for tractor-trailer wheeled mobile robots. Mech. Mach. Theory 2020, 150, 103872. [Google Scholar] [CrossRef]
- Shojaei, K.; Abdolmaleki, M. Output feedback control of a tractor with N-trailer with a guaranteed performance. Mech. Syst. Signal Process. 2020, 142, 106746. [Google Scholar] [CrossRef]
- Yuan, J.; Sun, F.; Huang, Y. Trajectory generation and tracking control for double-steering tractor–trailer mobile robots with on-axle hitching. IEEE Trans. Ind. Electron. 2015, 62, 7665–7677. [Google Scholar] [CrossRef]
- Leng, Z.; Minor, M. A simple tractor-trailer backing control law for path following. In Proceedings of the 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems, Taipei, Taiwan, 18–22 October 2010; IEEE: Piscataway, NJ, USA, 2010; pp. 5538–5542. [Google Scholar]
- Leng, Z.; Minor, M.A. A simple tractor-trailer backing control law for path following with side-slope compensation. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; IEEE: Piscataway, NJ, USA, 2011; pp. 2386–2391. [Google Scholar]
- Crenganiș, M.; Breaz, R.-E.; Racz, S.-G.; Gîrjob, C.-E.; Biriș, C.-M.; Maroșan, A.; Bârsan, A. Fuzzy Logic-Based Driving Decision for an Omnidirectional Mobile Robot Using a Simulink Dynamic Model. Appl. Sci. 2024, 14, 3058. [Google Scholar] [CrossRef]
- Robat, A.B.; Arezoo, K.; Alipour, K.; Tarvirdizadeh, B. Dynamics modeling and path following controller of tractor-trailer-wheeled robots considering wheels slip. ISA Trans. 2024, 148, 45–63. [Google Scholar] [CrossRef]
- Latif, A.; Chalhoub, N.; Pilipchuk, V. Control of the nonlinear dynamics of a truck and trailer combination. Nonlinear Dyn. 2020, 99, 2505–2526. [Google Scholar] [CrossRef]
- Oriolo, G.; De Luca, A.; Vendittelli, M. WMR control via dynamic feedback linearization: Design, implementation, and experimental validation. IEEE Trans. Control. Syst. Technol. 2002, 10, 835–852. [Google Scholar] [CrossRef]
- Widyotriatmo, A.; Hong, K.-S. Switching algorithm for robust configuration control of a wheeled vehicle. Control Eng. Pract. 2012, 20, 315–325. [Google Scholar] [CrossRef]
- Cheng, J.; Zhang, Y.; Wang, Z.; Gong, L. Backward Circular Motion Control for Mobile Robot with Two Trailers. In Proceedings of 2013 Chinese Intelligent Automation Conference: Intelligent Automation; Springer: Berlin/Heidelberg, Germany, 2013; pp. 145–151. [Google Scholar]
- Cheng, J.; Wang, B.; Zhang, Y.; Wang, Z. Backward orientation tracking control of mobile robot with N trailers. Int. J. Control Autom. Syst. 2017, 15, 867–874. [Google Scholar] [CrossRef]
- Cheng, J.; Wang, B.; Xu, Y. Backward path tracking control for mobile robot with three trailers. In Proceedings of the Neural Information Processing: 24th International Conference, ICONIP 2017, Guangzhou, China, 14–18 November 2017; Part VI 24. Springer International Publishing: Berlin/Heidelberg, Germany; pp. 32–41. [Google Scholar]
- Bai, G.; Meng, Y.; Liu, L.; Luo, W.; Gu, Q.; Li, K. A New Path Tracking Method Based on Multilayer Model Predictive Control. Appl. Sci. 2019, 9, 2649. [Google Scholar] [CrossRef]
- Shojaei, K. Neural network formation control of a team of tractor–trailer systems. Robotica 2018, 36, 39–56. [Google Scholar] [CrossRef]
- Zhao, Y. Robust Predictive Control of Input Constraints and Interference Suppression for Semi-Trailer System. Int. J. Control Autom. 2014, 7, 371–382. [Google Scholar] [CrossRef]
- Xu, P.; Cui, Y.; Shen, Y.; Zhu, W.; Zhang, Y.; Wang, B.; Tang, Q. Reinforcement learning compensated coordination control of multiple mobile manipulators for tight cooperation. Eng. Appl. Artif. Intell. 2023, 123, 106281. [Google Scholar] [CrossRef]
- Michałek, M.M.; Pazderski, D. Forward tracking of complex trajectories with non-Standard N-Trailers of non-minimum-phase kinematics avoiding a jackknife effect. Int. J. Control 2019, 92, 2547–2560. [Google Scholar] [CrossRef]
- Sanders, D.A. Non-Model-Based Control of a Wheeled Vehicle Pulling Two Trailers to Provide Early Powered Mobility and Driving Experiences. IEEE Trans. Neural Syst. Rehabil. Eng. 2017, 26, 96–104. [Google Scholar] [CrossRef]
- Yue, M.; Hou, X.; Gao, R.; Chen, J. Trajectory tracking control for tractor-trailer vehicles: A coordinated control approach. Nonlinear Dyn. 2018, 91, 1061–1074. [Google Scholar] [CrossRef]
- Manav, A.C.; Lazoglu, I.; Aydemir, E. Adaptive Path-Following Control for Autonomous Semi-Trailer Docking. IEEE Trans. Veh. Technol. 2021, 71, 69–85. [Google Scholar] [CrossRef]
- Ljungqvist, O.; Axehill, D.; Pettersson, H. On sensing-aware model predictive path-following control for a reversing general 2-trailer with a car-like tractor. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–31 August 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 8813–8819. [Google Scholar]
- Jean, F. The singular locus for the n-trailers car control system. In Proceedings of the 1995 34th IEEE Conference on Decision and Control, New Orleans, LA, USA, 13–15 December 1995; IEEE: Piscataway, NJ, USA, 1995; Volume 4, pp. 3869–3870. [Google Scholar]
- Haddad, W.M.; Chellaboina, V. Nonlinear Dynamical Systems and Control: A Lyapunov-Based Approach; Princeton University Press: Princeton, NJ, USA, 2008. [Google Scholar]











Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, T.; Huang, W.; Xu, P.; Zhang, W.; Li, P.; Zhao, Y. A Simple Curvature-Based Backward Path-Tracking Control for a Mobile Robot with N Trailers. Actuators 2024, 13, 237. https://doi.org/10.3390/act13070237
Zhao T, Huang W, Xu P, Zhang W, Li P, Zhao Y. A Simple Curvature-Based Backward Path-Tracking Control for a Mobile Robot with N Trailers. Actuators. 2024; 13(7):237. https://doi.org/10.3390/act13070237
Chicago/Turabian StyleZhao, Tianrui, Weining Huang, Pengjie Xu, Wei Zhang, Peixing Li, and Yanzheng Zhao. 2024. "A Simple Curvature-Based Backward Path-Tracking Control for a Mobile Robot with N Trailers" Actuators 13, no. 7: 237. https://doi.org/10.3390/act13070237
APA StyleZhao, T., Huang, W., Xu, P., Zhang, W., Li, P., & Zhao, Y. (2024). A Simple Curvature-Based Backward Path-Tracking Control for a Mobile Robot with N Trailers. Actuators, 13(7), 237. https://doi.org/10.3390/act13070237