Abstract
Soft transportation devices with high flexibility, good stability, and quick controllability have attracted increasing attention. However, a smart soft transportation device with tactile perception and a non-contact actuating mode remains a challenge. This work reports a magnetic soft pipeline (MSP) composed of sensor film, a magnetorheological elastomer (MRE) cavity pipeline, and heater film, which can not only respond well to tactile compression stimuli but also be transported by magnetic actuation. Notably, the sensor film was integrated on the upper surface of an MRE pipeline, and the relative resistance change (∆R/R0) of the MSP was maintained at 55.8% under 2.2 mm compression displacement during 4000 loading cycles. Moreover, the heater film was integrated on the lower surface of the MRE pipeline, which endows the MSP with an electrothermal heating characteristic. The temperature of the MSP can be increased from 26.7 °C to 38.1 °C within 1 min under 0.6 V. Furthermore, the MSP was attracted and deformed under the magnetic field, and the ∆R/R0 of the MSP reached 69.1% under application of a 165 mT magnetic field density. Benefiting from the excellent perception and magnetic deformation performances, the magnetic actuate transportation of the MSP with self-sensing was successfully achieved. This multi-functional soft pipeline integrated with in situ self-sensing, electrothermal heating, and non-contact magnetic actuating transportation performance possess high potential in smart flexible electronic devices.
1. Introduction
Flexible wearable devices have attracted wide attention in many fields because of their real-time and continuous monitoring of human information. The development of tactile sensing and corresponding integration with flexible devices is of great significance in building smart soft devices [1]. During the past decade, flexible sensors and electrothermal film based on polydimethylsiloxane (PDMS) matrix have gained extensive attention [2,3,4,5,6,7,8]. Yim CJ et al. developed a high-tension and high-sensitivity sensor based on PDMS matrix with a gauge factor over 40 and tensile stress about 50% [5]. Generally, the PDMS-based flexible sensors respond to a wide range of tactile external stimuli (such as bending and compression) and exhibit good stability and ultra-high sensitivity (gauge factor > 100) [1,9,10,11,12]. Lei X et al. used glucose additive as a porogen and endothermic agent, and developed a simple, low-cost, and fast laser thermal printing one-step process for the preparation of porous PDMS film with surface microstructure [11]. It was reported that the film sensor based on PDMS matrix exhibited good electrical response (gauge factor (≈21 for 18∼20 strain), pressure sensitivity (≈0.58 kPa−1 in 300∼400 Pa)) to pressure and bending detection [13]. Similarly, the electrothermal film based on PDMS matrix also showed an excellent Joule heating property (the temperature of heater film is 203 °C under 2 V voltage) [14,15,16,17]. Inspired by the evolution-optimized bioelectricity stimulus and multilayer structure of natural reptile skins, electronically innervated fluorescence-color switchable hydrogel actuating systems, with bio-inspired multilayer structure comprising a responsive fluorescent hydrogel sheet and conductive Graphene/PDMS film with electrothermal effect, were presented [17]. The PDMS-based flexible electrothermal actuator not only possessed good electrical Joule thermal performance but also satisfied the low resistance and low loading voltage requirements [18]. Clearly, the sensor and electrothermal electronics based on PDMS matrix present great robustness, rapid response, and multi-field coupling characteristics. However, the intelligent flexible materials with tactile sensing perception and Joule heating performances are still scarce, though they are particularly important in smart soft devices.
Magnetorheological elastomer (MRE) is one kind of intelligent material composed of magnetic particles and polymer matrix. By controlling the external magnetic field, the mechanical properties of MRE can be continuously, rapidly, and reversibly changed, exhibiting a unique magnetorheological effect. In the past two decades, through optimizing polymer matrix, magnetic particles, additives, etc., the mechanical properties and magnetorheological effects of MRE have been greatly improved. Due to the good mechanical properties and magnetic deformation performances, magnetorheological elastomer (MRE) shows great potential in soft robotics, aerospace engineering, and intelligent artificial muscles [19,20,21,22,23]. Choi DS et al. proposed a universal, shape-adaptive/-retaining and reversible, variable-hardness gripper skin based on MRE that served as a flexible solution for grasping such objects without damaging them [21]. Due to the low cost and simple fabrication advantages, the MREs have been applied in magnetic actuators and have demonstrated capabilities for pumping and mixing liquids in microfluidics [24]. Based on MRE, Cao et al. developed a magnetically actuated soft robot which possessed high flexibility, excellent stability, and great fatigue durability [25]. This MRE robot could be squeezed and deformed under the external magnetic field and recovered to the initial state by removing the magnetic field. Although magnetically actuated devices have gradually attracted attention, few of them have considered the real-time monitoring and response to the actuate deformation of magnetic actuators. With the development of human–machine interaction (HMI) equipment, the construction of intelligent soft actuated devices with non-contact magnetic controllable and self-sensing behaviors become an urgent problem to meet the growing demand of multi-field coupling applications.
Silver nanowires (AgNWs) show high application potential in both the sensing and electrical Joule thermal areas due to their outstanding conductivity, ultra-high sensitivity, and fast response characteristics [26,27,28,29]. By using the AgNWs as the conductive materials, the flexible conductive film could be successfully constructed and applied as a good candidate for smart sensors and soft robots [30]. Moreover, the electrothermal film based on AgNWs could also realize egg heating through the thermal energy generated by Joule heating [18]. Moreover, silver (Ag) flake is a high-purity and high-conductivity material, which shows a stable two-dimensional laminar sheet structure and great electrothermal effect [31]. By integrating the AgNWs and Ag flakes together, an electrothermal film actuator with fast heating could be easily achieved [16]. The reported conductive MRE not only exhibited wonderful magnetic actuation, but also the actuation could be detected in situ by the hybrid film, which demonstrated the unique actuation-sensing coupling behavior. Recently, several works reported that an MRE bionic pump could be designed by using magnetically actuated pipeline transport [32]. However, the simultaneous sensing and controlling of the MRE bionic pump remains a challenge which hardly satisfies the increasing requirement.
Electrothermal heating can actively control the liquid temperature in the pipeline cavity according to the environment; thus, it greatly extends the application of flexible soft actuators. Herein, a soft pipeline (MSP) with magnetic actuation, self-sensing, and electrothermal heating is fabricated. The tactile compression mechanical stimuli of the MSP can be detected by sensing the change in resistance. Benefiting from the heater film, the MSP shows good Joule heating characteristics under low loading voltage. The non-contact magnetically actuated transportation of the MSP is originated from the MRE matrix. Additionally, the MSP exhibits excellent magnetic–electric coupling response behavior and the magnetically actuated deformation is fed back in real time by the relative resistance change (∆R/R0) of the sensor film. As a result, the magnetically actuated transportation of the MSP with in situ self-sensing is successfully achieved. Because of its good electrical and excellent stimuli responsiveness, this MRE pipeline possesses high application potential in smart actuation devices.
2. Materials and Methods
2.1. Materials
The raw materials for self-prepared silver nanowire (AgNWs) solution [33], polyvinylpyrrolidone (PVP), AgNO3, glycerol, ethanol, and NaCl, were from Sinopharm Chemical Reagent Co., Ltd., Shanghai, China. Silver (Ag) flakes were purchased from Shanghai Sigma High Technology Co., Ltd., Shanghai, China. PDMS (type Sylgard 184) precursor and curing agent were supplied from Dow Corning GmbH, Freeland, MI, USA. Carbonyl iron particles (CIPs, type CN) with an average diameter of 3.85 μm from BASF SE (Ludwigshafen, Germany) were used as ferromagnetic particles.
2.2. Fabrication Process
The conductive pattern designed and optimized by CAD (2016) software was used to prepare the sensor and heater film. The conductive layer of the sensor and heater film were designed as a strip-shaped and U-shaped pattern, respectively. The reusable masking films were obtained by hollowing out the commercial polyethylene terephthalate (PET) film into the designed pattern via laser cutting technology.
The curing ratio of PDMS precursor was 20:1, and MRE precursor (CIP mass fraction of 50 wt %) was prepared by dispersing the CI particles into the precursor. After stirring the mixture and vacuuming for 5 min, the MRE was obtained. The sensor and heater film were both composed of sandwich structures (PDMS/conductive layer/PDMS). The preparation process of the sensor, heater film, and MSP was showed in Figure 1. First, PDMS precursor was poured onto a silicon (Si) wafer, spin-coated at 500 rpm for 15 s and 1500 rpm for 30 s, and cured at 90 °C for 3 min with the semi-cured state (Figure 1a). The conductive layer of sensor and heater film was AgNWs and Ag mixture, respectively. Here, 10 mL AgNWs (concentration: 8.7 mg/mL) and 0.4 g Ag flakes were sonicated for 30 min to obtain the conductive Ag mixture.
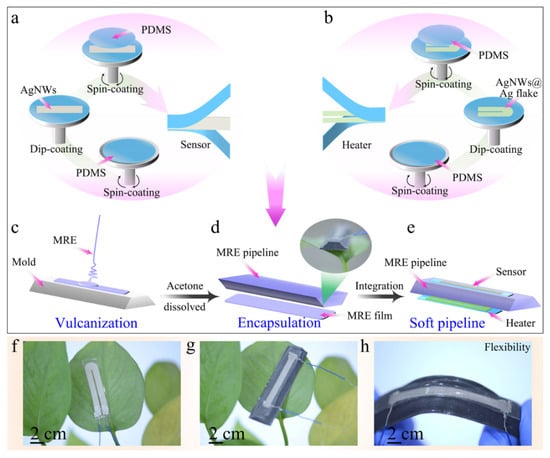
Figure 1.
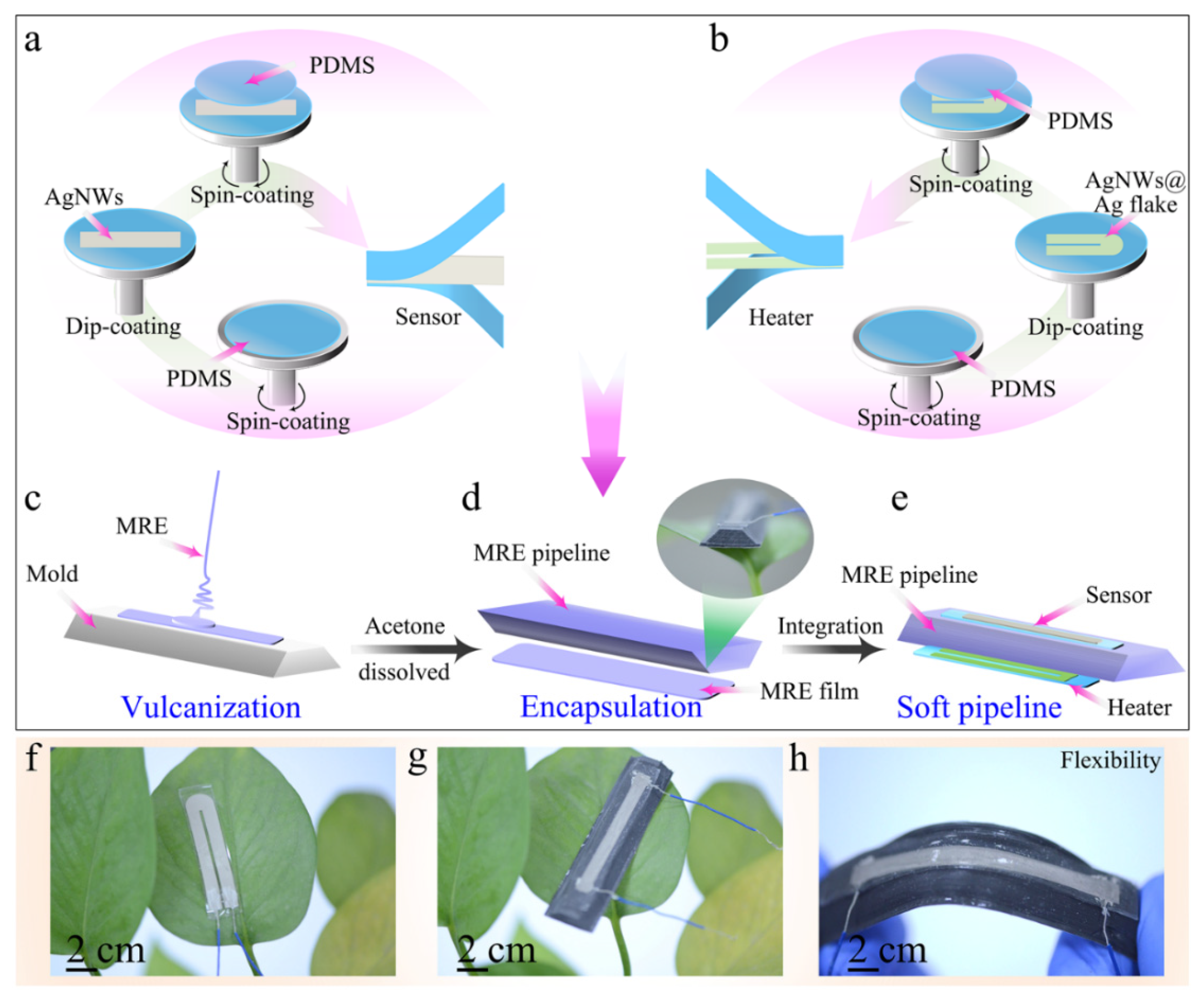
Preparation process of (a) sensor and (b) heater film of magnetic soft pipeline; Fabrication process of soft pipeline: (c) MRE precursor in the trapezoidal mold, (d) MRE film package on top of the pipeline; (e) Integration of sensor and heater film into the top and bottom of pipeline, respectively; The images of (f) heater film, (g) magnetic soft pipeline; (h) The pipeline under bending stimulus.
Second, the masking film was attached to the semi-cured PDMS film. The conductive layer (AgNWs, Ag mixture) was coated and dried on the masking pattern of PDMS. Third, the PDMS/conductive layer was cured at 90 °C for 10 min, and the masking film was peeled off after the curing. The wires were adhered to the electrode zones of the conductive layer with silver paste. At last, PDMS precursor was poured onto the PDMS/Ag layer, spin-coated at 500 rpm for 15 s and 1500 rpm for 30 s, and the sensor (PDMS/AgNWs/PDMS) and heater (PDMS/Ag mixture/PDMS) film were formed (Figure 1a,b).
Figure S1 shows the designation and specific size of the trapezoidal mold. Figure 1c–e show the fabrication process of MRE soft pipeline. First, the MRE precursor was poured into the inner cavity of the 3D-printed cavity pipeline mold and then vacuumed for 10 min to remove the bubbles (Figure 1c). Then, the encapsulation of the MRE cavity pipeline was completed by squeezing out the excess MRE precursor from the pipeline by using the mold cover. Afterwards, the encapsulated pipeline was cured at 90 °C for 15 min and then immersed in acetone solution for ultrasonic treatment. Figure S3a–c show the images of the 3D printing mold, MRE precursor in the mold, and the mold after curing, respectively. The acetone solution completely dissolved the external mold after 6 h ultrasonication, and then the MRE cavity pipeline was obtained (top unsealed). Finally, the MRE film was used to encapsulate the top of the cavity pipeline and complete the preparation of the MRE cavity pipeline (Figure 1d). Finally, a thin layer of PDMS precursor was uniformly coated on the top and bottom of the MRE pipeline. The sensor and heater film were pasted on the thin layer of PDMS precursor. After curing, a multi-functional smart soft pipeline (MSP) was formed (Figure 1e). Figure 1f,g show the heater film and MSP can loaded on the leaves, which demonstrates the light weight of the final product. Notably, the MSP can be bent at large angles (Figure 1h) and the good flexibility endows the MSP with high sensitivity to deformation actuation and tactile sensing.
2.3. Characterization
The compression test system consists of a dynamic mechanical analyzer (DMA, ElectroForce 3200, TA Instruments, Eden Prairie, MN, USA) and Modulab MTS (Solartron analytical, AMETEK advanced measurement technology, Inc., Chichester, UK). The micromorphology and structures of AgNWs and Ag flakes were observed by scanning electron microscope (SEM, model XL30 ESEM-TMP, Philips of Holland Co., Ltd., Eindhoven, The Netherlands) under 3 kV. The electrothermal heating was performed with DC power of different voltages. The infrared thermal camera (type Image IR 8300, Infra.Tec. Co., Ltd., Dresden, Germany) was used to obtain the electrothermal images. The magnetic response tests were finished by Modulab MTS with a DC power electromagnetic coil. The magnetically actuated transport experiment was completed by a permanent magnet.
3. Results and Discussion
3.1. Mechanic–Electric Coupling Property of the MSP
In order to systematically investigate the mechanic–electric coupling response performance, the electrical perception of the sensor film (PDMS/AgNWs/PDMS) under compression stimulus was studied here by using an Electroforce system and an electrical property test system, Modulab MTS (Figure 2).
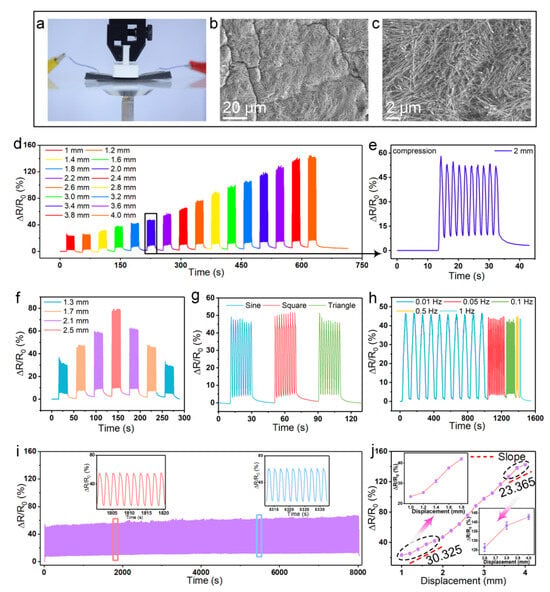
Figure 2.
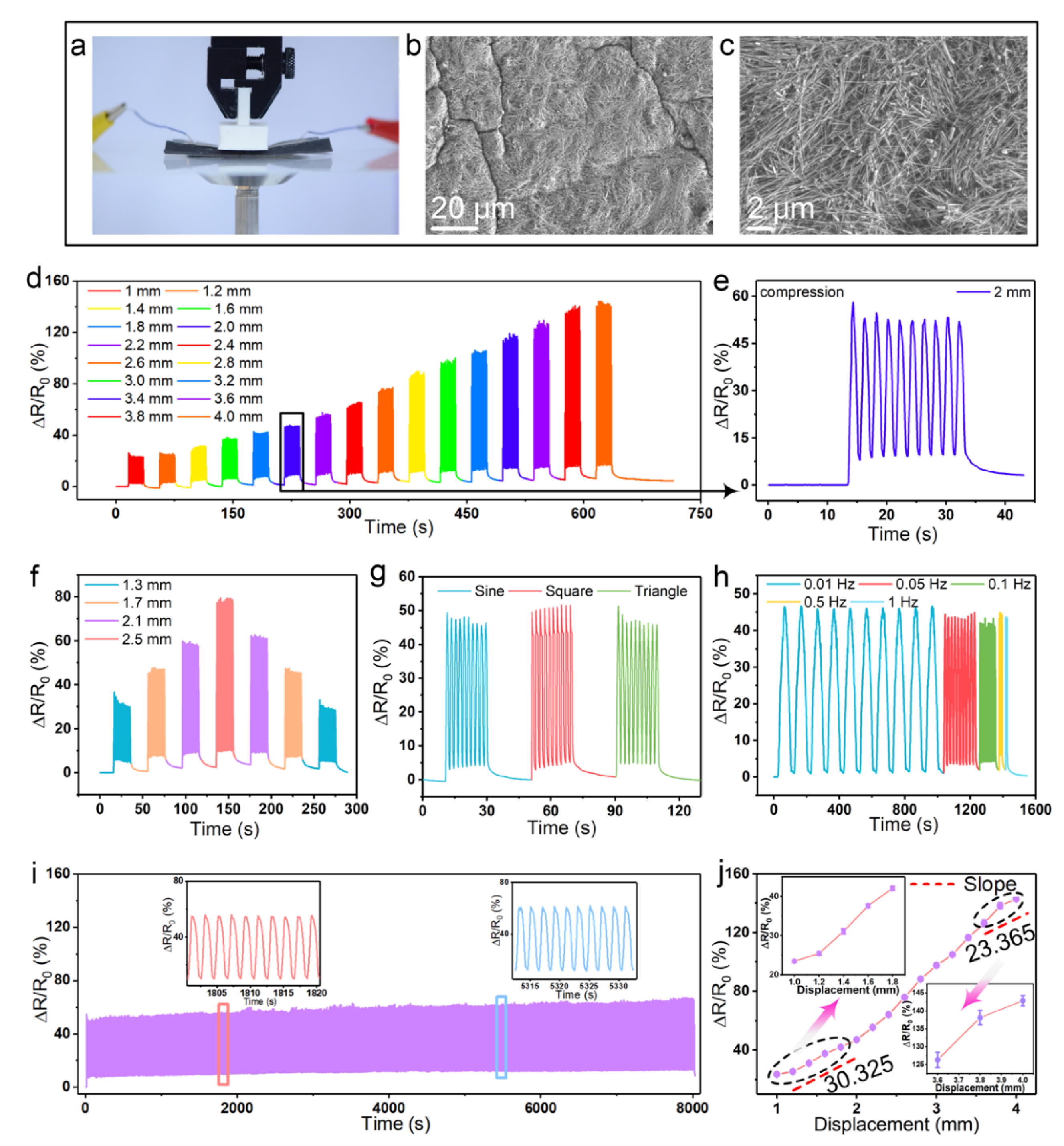
(a) Image of MSP under compression stimulus; (b,c) SEM images of AgNWs after compression test; (d) Compression sensing performance with different compression displacement at frequency of 0.5 Hz; (e) Magnified curve of ∆R/R0 under the compression displacement of 2 mm; (f) ∆R/R0 of compression displacement loading and unloading; (g) Different waveforms of electrical performance at displacement of 2 mm; (h) Real-time ∆R/R0 response with different frequencies; (i) The stability under 4000 cycles compression; (j) ∆R/R0 vs. compression displacement. Inset: the enlarged area of ∆R/R0 vs. compression displacement.
The influence of the compression displacement, loading signal waveforms and frequencies, multi-cycle stability, and sensitivity was investigated. Figure 2a shows the image of the MSP under compression excitation. The SEM image exhibits that obvious cracks will be formed on the conductive layer (AgNWs) under compression excitation (Figure 2b). However, the Ag nanowires are still interconnected; thus, the sensor film still possesses good conductivity (Figure 2c). Keeping the loading frequency at 0.5 Hz as a constant, the applied compression displacement varies from 1 mm to 4 mm, and the ∆R/R0 of the MSP increases from 23.4% to 142.8% (Figure 2d). Obviously, ∆R/R0 increases with increasing of the compression displacement. Therefore, the MSP shows good sensitivity throughout the compression deformation stage.
Keeping the compression displacement at 2 mm, the cyclic loading was performed for 10 cycles, and the ∆R/R0 almost kept at a constant value (Figure 2e). As shown in Figure 2f, the ∆R/R0 of the MSP varied from 31.3% to 77.3% under gradient loading from 1.3 mm to 2.5 mm, and it could return to 30.8% during the gradient unloading process. With increasing of the compression displacement, the resistance of the sensor film gradually increases. When the compression displacement gradually recovers, the resistance returns to the original value, which indicates that the MSP has a good sensing stability. Moreover, its sensing performance under different loading waveforms of sine, triangular, and square waves was also investigated. As shown in Figure 2g, the ∆R/R0 of the MSP was consistent, and different loading waveforms of compression could be well responded to by the sensor film. When the frequencies were varied from 0.01 Hz to 1 Hz, the resistance responses of the MSP were similar (Figure 2h). Therefore, the loading frequency hardly affects the sensing perception behavior of the MSP. Moreover, by keeping 0.5 Hz frequency and 2.2 mm compression displacement as constant, the robustness of the MSP under 4000 loading cycles was tested (Figure 2i). After 900 cycles of compression excitation, the ∆R/R0 of the MSP was 55.8%. Moreover, after 2655 cycles, the ∆R/R0 of the MSP changed to 56.7%. Therefore, the MSP shows good durability and stability.
The relationship of ∆R/R0 and compression displacement (from 1 mm to 4 mm) was also studied to analyze the sensing property of the MSP (Figure 2j). Here, the gauge factor (GF) is defined as (∆R/R0)/∆l, where the ∆l represents relative compression displacement change. The sensitivity coefficients are approximated to three response ranges and the corresponding compression displacement was divided into 1 mm to 1.8 mm (the first range), 2 mm to 3.6 mm, and 3.8 mm to 4 mm (the third range), respectively. The insets of Figure 2j exhibit enlarged views of the first range and the third range, respectively. In the first range, the GF of PMAP is 30.325% mm−1. As the compression displacement increased from 3.8 mm to 4 mm, the ∆R/R0 increased from 138.1% to 142.8%. In the third range, the GF of PMAP is calculated at 23.365% mm−1. Clearly, the sensitivity gradually decreases with increasing of the compression displacement. As a result, the MSP exhibits excellent stability and good sensitivity during the compression process.
3.2. Electrothermal Behavior of the MSP
After investigating the mechanical–electrical sensing response properties of the MSP, the pipeline heating behavior of the the MSP was systematically investigated. Here, the U-shaped heater film (PDMS/Ag mixture/PDMS) with a unique electrothermal characteristic was studied (Figure 3).
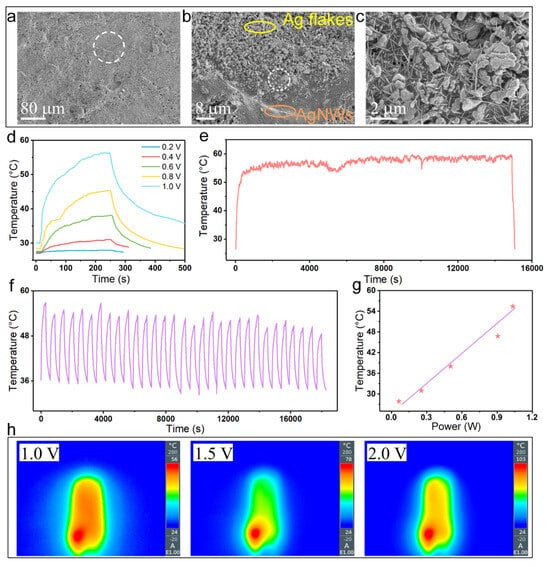
Figure 3.
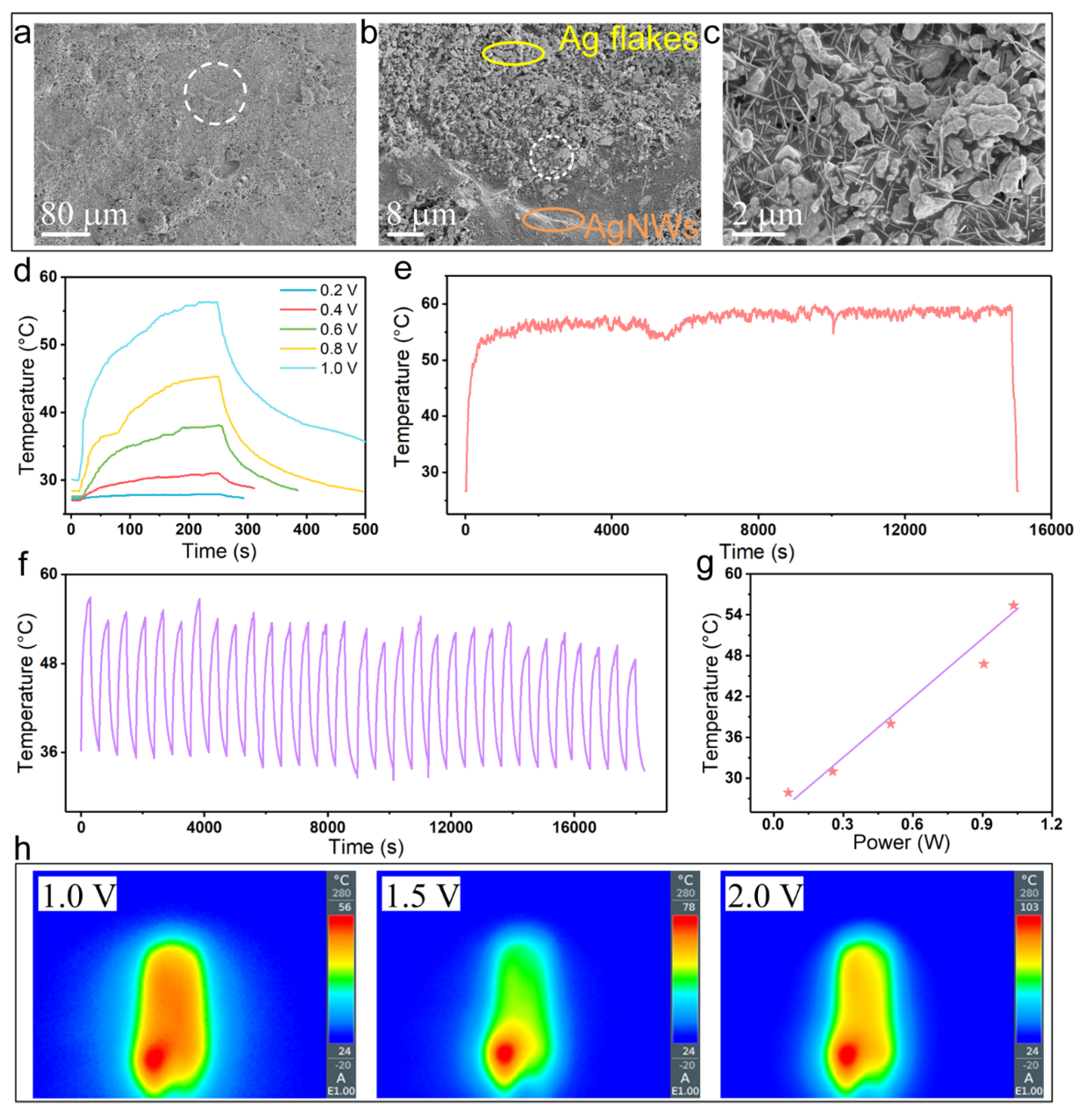
SEM images of (a) Ag mixture, (b,c) the enlarged area of AgNWs and Ag flakes; (d) Time−temperature relationships of the heater film; (e) Temperature stability of the heater film at a constant voltage of 1.0 V for 15,000 s; (f) Cyclic electrothermal stability of MSP at 1.0 V; (g) Experimental results of saturation temperature as a function of electrical power; (h) Infrared thermal images of MSP under different voltages.
Figure 3a shows the micromorphology and structures of the conductive layer (Ag mixture). The dashed circles in Figure are showing the magnified observed areas. Here, the conductive layer in the U-shaped heater film was composed of AgNWs and Ag flakes (Figure 3b). Clearly, the Ag nanowires and nanoflakes assembled to form 3D staggered structure, which endows the heater film with excellent electrical conductivity (Figure 3c). Figure 3d shows the temperature vs. time curves of the heater film under various voltages. The temperature of the heater film increased sharply after the circuit was energized until reaching the steady state temperature, and the temperature decreased rapidly to the room temperature after the circuit was powered off. To further evaluate the electrothermal behavior of the heater film, the voltage was kept at 1.0 V to investigate the stability (Figure 3e). The temperature of the heater film was continuously maintained at about 55.8 °C under the voltage loading over 15,000 s, which presented good long-term stability.
Moreover, the heater film remained repeatable and similar electrothermal performance after 30 cycles of voltage loading–unloading. The results demonstrate that the U-shaped heater film possesses good cyclical stability (Figure 3f). Figure 3g shows the linear fit relationship between the saturation temperature and the applied power. Obviously, the saturation temperature increases with the increasing of applied power, which endows the programmable and controllable deformation capability of the heater film. As a result, the heater film possesses superb stability, good reliability, and repeatability. Benefiting from the good electrothermal behavior of the heater film, the MSP was able to heat the pipeline inner cavity. The infrared thermal images show the heating behavior of the MSP under 1.0 V, 1.5 V, and 2.0 V voltage (Figure 3h). Clearly, the temperature of the MSP increased obviously when the voltage was applied to the heater film. The temperature of the heater film could reach to 100 °C at 2.0 V, which provided a heating function for MSP transport.
Here, in order to deeply research the practical application of MSP electrothermal behavior, the Joule heating property of heater film was investigated (Figure 4).
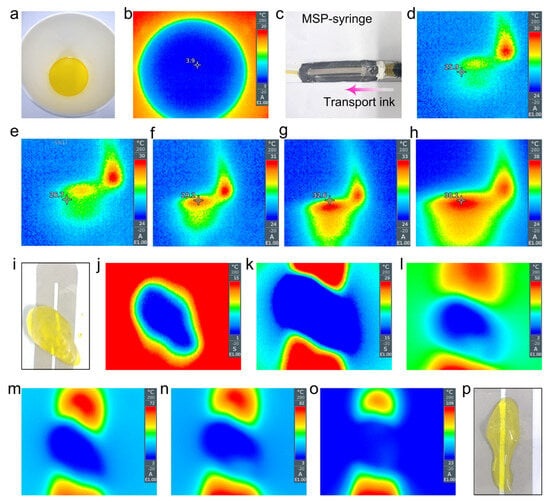
Figure 4.
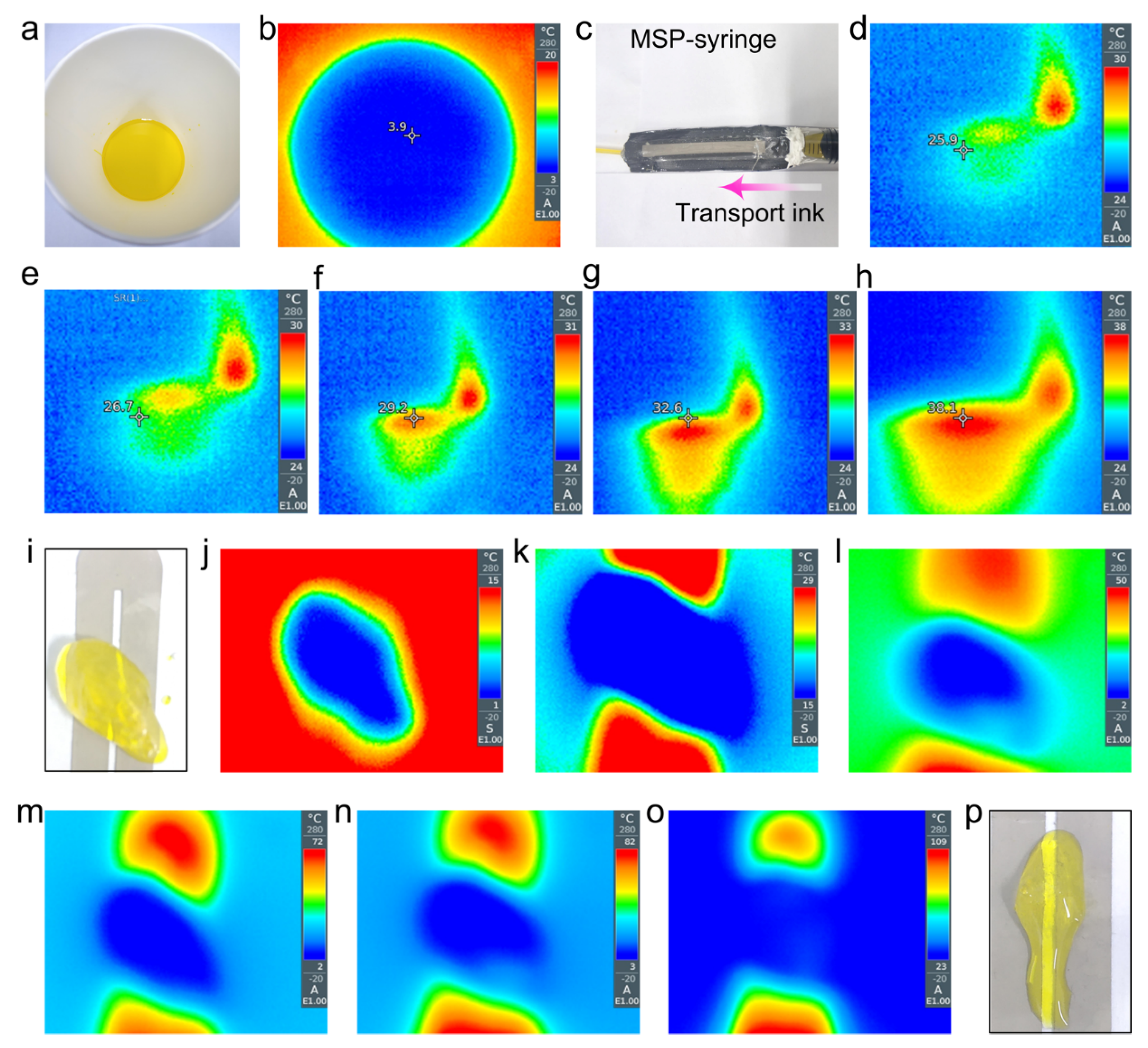
Low−temperature ink: (a) Optical image, (b) infrared thermal image; (c) MSP transportation device and image for transporting low temperature ink; Infrared thermal images of MSP temperature distribution (d) at the power−on moment, (e–h) with increasing energization time; (i) Optical image and (j) infrared thermal image of ink ice cube on the heater film without heating; Ink ice cubes were heated and melted on the heater film: (k–o) Infrared thermal image and (p) optical image.
Notably, the ink was placed in a refrigerator and removed after 6 h. Figure 4a,b show the optical image and infrared thermal image of low temperature ink, respectively. Figure 4b presents that the temperature of the ink is only 3.9 °C. One end of the MSP was connected to a syringe and sealed with sealant. The catheter was then introduced at the other end of the MSP to complete the seal process through the same step. Finally, one simple pipeline transportation device was completed and assembled (Figure 4c). The low-temperature ink was transported into the MSP through a syringe, and the heating effect of the heater film on the low-temperature ink in the MSP cavity was investigated. As shown in Figure 4d, the temperature of the MSP was 25.9 °C when the heater film was energized. With the continuous applied voltage of 0.6 V, the temperature of the MSP increased significantly with the increase in the heating time, and the temperature of the MSP can be increased from 26.7 °C to 38.1 °C within 1 min (Figure 4e–h). Obviously, the heater film presents a good heating effect, and the MSP can reach the human body surface temperature range in a short time under the low loading voltage. Therefore, the MSP shows good potential in bionic biological transport.
To further investigate the electrothermal heating effect of the heater film, the ink was frozen in the refrigerator. The ink ice cube was removed after 24 h and placed on the heater film surface (Figure 4i). Figure 4j shows the temperature distribution of the ink ice cube on the heater film without applying the voltage. After applying 2.0 V voltage to the heater film, the temperature of the heater film and the ink ice cube increased significantly with the increase in the energization time. Due to the placement of the ink ice cube in the middle of the heater film, the infrared thermal images show the temperature partition effect. The middle area represents the temperature distribution of the ink ice cube, while the upper and lower areas represent the temperature change of the heater film, which visually shows and distinguishes the temperature comparison of the heater film and ice cube. The infrared images show that the temperature of the heater film increases from 29 °C to 109 °C (Figure 4k–o). The ink ice cube was melted on the heater film surface during the temperature rise process (Figure 4p). Therefore, the heater film possesses great electrothermal performance, which can realize different heating effects of the MSP by adjusting the applied voltage.
3.3. Magnetic-Electric Behavior of the MSP
The MSP is a cavity pipeline constructed of MRE matrix; thus, it shows superb magnetic actuate performance. Since the sensor film (PDMS/AgNWs/PDMS) was tightly adhered to the surface of the pipeline, the deformation of the pipeline could be detected in situ. Here, the actuated deformation and self-sensing behavior of the MSP under different magnetic field density were systematically investigated (Figure 5).
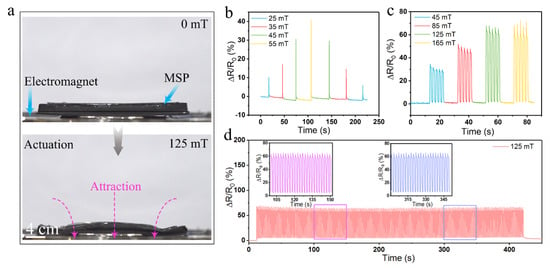
Figure 5.
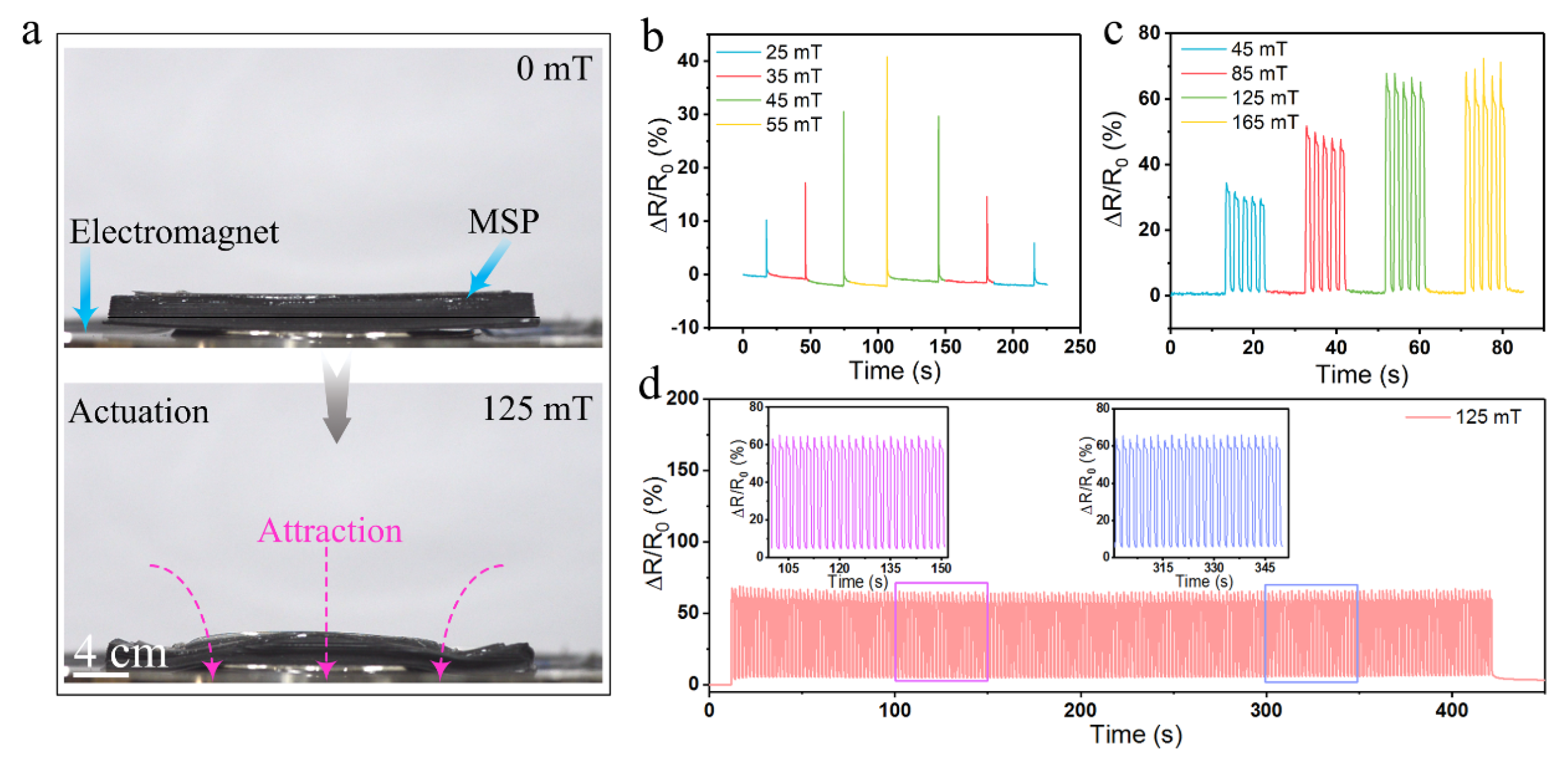
(a) Images of MSP attracted by the electromagnet under 125 mT magnetic field density; (b) ∆R/R0 of the MSP under loading and unloading of magnetic field; (c) ∆R/R0 of MSP under different magnetic field density; (d) The magnetic−electric cyclical stability of MSP under 125 mT magnetic field density.
When the MSP was placed on the electromagnetic surface, the MSP was significantly extruded and deformed under the magnetic field attraction (Figure 5a, Movie S1). The MSP returned to the initial state after removing the external magnetic field. Notably, the sensor film of the MSP exhibited a good and stable resistance response under the gradient loading–unloading magnetic field of 25–55 mT (Figure 5b). The ∆R/R0 of the MSP was 10.2% and 40.8% under 25 mT and 55 mT magnetic field density, respectively. The ∆R/R0 of the MSP at 45 mT loading and unloading magnetic field density was 30.5% and 29.7%, respectively (Figure 5b). Clearly, the resistance changes of the MSP show good reversible properties during the magnetic gradient loading–unloading state.
To further verify the magnetic field-dependent electrical behavior of the MSP, the resistance response of the MSP under applying 45–165 mT magnetic field density was studied (Figure 5c). The resistance of the MSP increases with the increase in the magnetic field density, and the ∆R/R0 of the MSP can vary from 31.6% (45 mT) to 69.1% (165 mT). During the actuation, the magnetic force induced the deformation of the MRE film in the MSP. Then, the resistance changes were obtained in the Ag film due to the extrusion and deformation of the conductive film under the magnetic field attraction. As a result, the contact nodes between the AgNWs decreased under tensile traction, thus leading to an increase in MSP resistance. The contact nodes could be reconnected, and the resistance returned to the initial value after the external magnetic field was removed. Moreover, the cyclical stability of the MSP under 125 mT magnetic field density was also tested (Figure 5d). Obviously, the MSP shows good resistance response stability and robustness during the 200 loading–unloading cycles. In conclusion, the MSP exhibits excellent magnetically actuated deformation–sensing response performance.
3.4. Magnetic–Electric Behavior of the MSP
The purpose of this work is to realize the magnetically actuated transport in situ sensing monitoring function. Here, the transportation process of the MSP was investigated by facile operation of the permanent magnet (Figure 6).
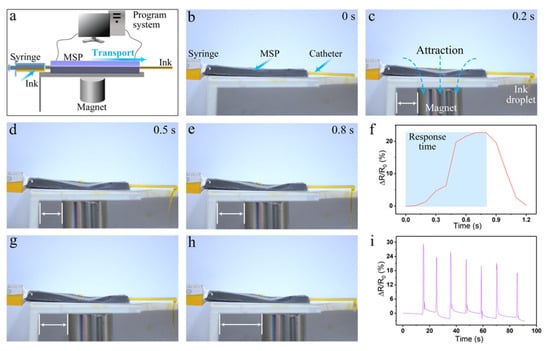
Figure 6.
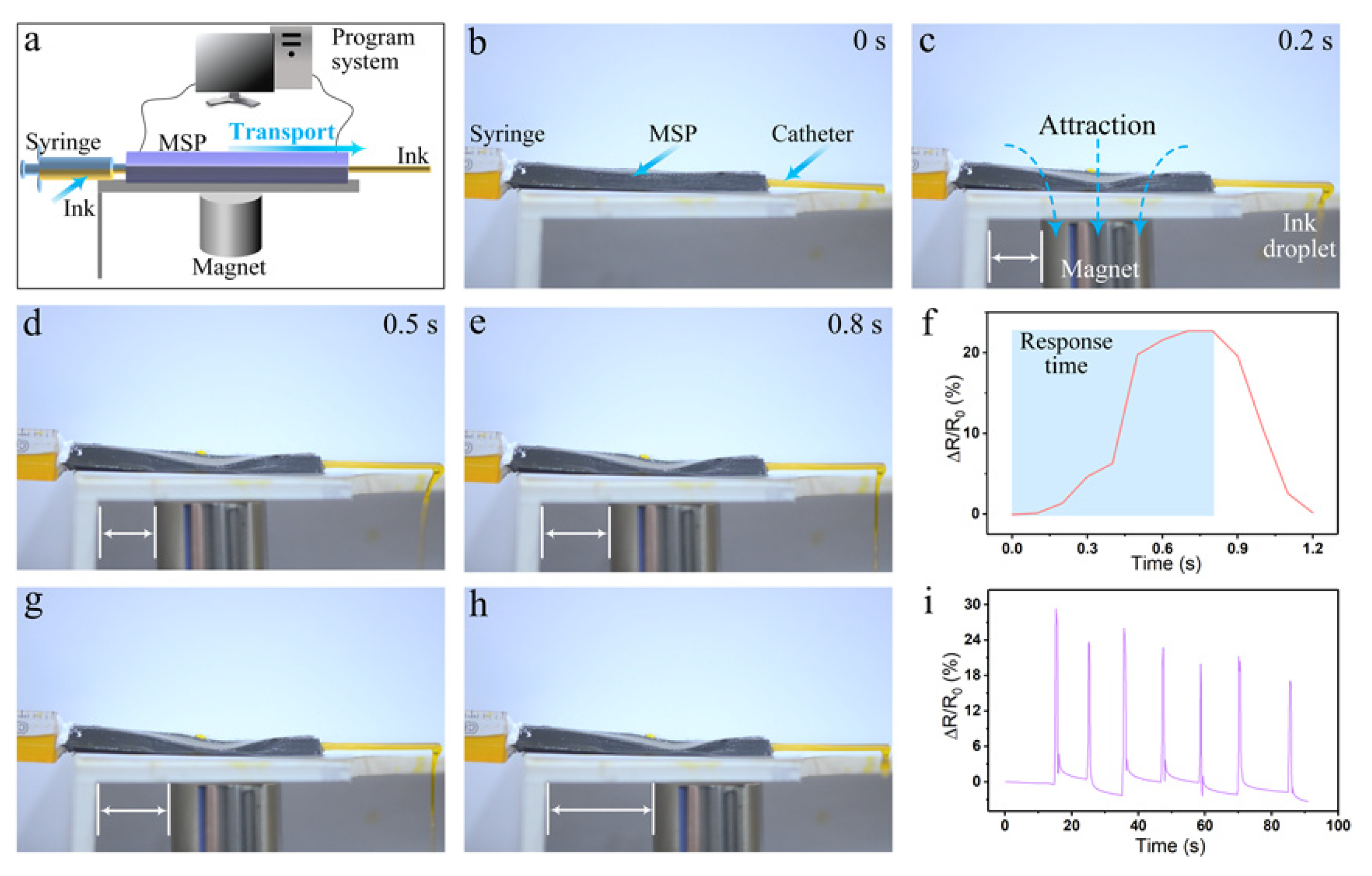
(a) The schematic diagram of MSP magnetically actuated transportation−sensing device; (b–e) Images of MSP transportation process; (f) Resistance response time of one transportation cycle; (g,h) The actuated deformation and transportation of MSP under different positions of the magnet; (i) The in situ perception of MSP with seven transportation cycles.
One end of the MSP was connected to a syringe, which could mimic the infusion source in the actual biological condition. The other end of the MSP was introduced into a catheter to observe of droplet flow. Figure 6a shows the schematic diagram of the MSP magnetically actuated transportation-sensing device. The MSP and the permanent magnet were placed above and below the platform, respectively. The signal response was recorded by the Modulab MTS test system and fed back to the resistance change of the MSP. Figure 6b exhibits the image in the MSP transportation device without applying the magnetic field, which indicates the pipeline is straight. As soon as the magnet is applied near the film, the pipeline becomes deformed. Figure 6c–e show one cycle of the MSP magnetic actuate transportation ink process (Movie S2). Notably, one cycle of the actuated transportation process can be completed within about 0.8 s. During this process, the ink in the MSP cavity is flows rapidly with loading of the magnetic field and continuously flows under the real-time attraction of the magnetic field. Obviously, the MSP shows good actuated transportation effect under the magnet traction.
Figure 6f presents the resistance change of MSP one-cycle transportation, and it is found that the ∆R/R0 is about 22.6%. The transportation process can be monitored and fed back in real time through the sensor film, which realized the in situ self-sensing. To further investigate the magnetically actuated transportation effect, the magnet was placed near the end of the MSP catheter. Figure 6g,h show the magnetically actuated transportation images of the magnet under different locations. Clearly, the pipeline transport ink was affected by the changes in the magnetic field loading location. Notably, the MSP was restricted by the magnet size and magnetic field action range; thus, the MRE soft pipeline was locally compressed and deformed under the magnetic field attraction. Figure S2a–d show the mechanical analysis and finite element simulation results of the MRE pipeline. The ink in the pipeline cavity was squeezed to realize the liquid flow. Figure 6i shows the ∆R/R0 of the MSP for seven-cycle actuated transportation. Due to the influence of acting position and area of the magnet, the ∆R/R0 of the MSP varied; thus, the actuated transportation process can be monitored in situ. Therefore, this multifunctional soft pipeline with electrothermal and magnetically actuated transportation in situ self-sensing characteristics show great potential in bionic devices and HMI.
4. Conclusions
In summary, a smart soft pipeline with in situ self-sensing, electrothermal heating, and magnetic actuating performances was fabricated by using mask-patterning and spin-coating technology. Based on the presented research these conclusions were made:
- The sensor film shows good sensitivity, and the ∆R/R0 of the MSP is 142.8% at 4 mm compression displacement.
- Moreover, the heater film can be continuously heated for 15,000 s to maintain the temperature at 55.8 °C, which demonstrates good electrothermal stability.
- Furthermore, the MSP shows great magnetic-electric response performance, and the ∆R/R0 of the MSP reaches to 66.5% under 125 mT magnetic field density.
- Notably, the excellent mechanical–magnetic–electric coupling response properties endow the MSP with the magnetically actuated deformation capability and in situ sensing behavior. The actuated transportation process can be completed within 0.8 s and the ∆R/R0 of the MSP is about 22.6%.
- Clearly, the MSP possesses good magnetic actuate transportation-sensing coupling performance. The ink in the MSP cavity can flow rapidly and continuously under the real-time attraction of the magnetic field.
- Recently, magnetic soft robots are increasingly attractive in the biomedical field. Zang JF et al. proposed magnetic soft microfiberbots with high steerability, reliable maneuverability, and multimodal shape reconfigurability to perform robotic embolization in submillimeter regions via a remote, untethered, and magnetically controllable manner [34]. However, the systematic methods to perceive the real-time motion of magnetic soft-pipeline robots are still scarce. The as-prepared MSP shows great magnetically actuated transport-self-sensing perception coupling performance. As a result, the research and applications of smart magnetic soft-pipeline robots in the biomedical and drug transportation field will be a main focus in the future.
Supplementary Materials
The following supporting information can be downloaded at: https://www.mdpi.com/article/10.3390/act13060199/s1. Figure S1. Trapezoidal mold (a) top view and (b) cover side view dimensions; (c) Trapezoidal pipeline inner cavity top view dimensions; Unit: mm. Figure S2. Schematic diagram of (a) the position of the trapezoidal pipeline under magnetic field, (b) the distribution of magnetic field; (c) Deformation-stress and (d) Deformation-displacement distribution of the trapezoidal pipeline under 300 mT magnetic field density. Figure S3. Fabrication process of magnetic actuate pipeline. Images of: (a) 3D printing mold, (b) MRE precursor in the mold, (c) the trapezoidal pipeline mold after curing.
Author Contributions
Conceptualization, methodology, software, formal analysis, investigation, data curation, visualization, and writing—original draft preparation: Q.S.; resources and supervision: Y.L. and S.X.; writing—review and editing: S.G. and S.X.; project administration and funding acquisition: S.X. All authors have read and agreed to the published version of the manuscript.
Funding
This work was supported by the National Natural Science Foundation of China (Grant Nos. 12072338) and the Fundamental Research Funds for the Central Universities (WK2480000007).
Data Availability Statement
The research data are not shared.
Acknowledgments
The authors Fei Liu, Cunyong Zhang, Shike She, Bingxia Xu, Lili Sun, Zhenfeng Tian, Lan Huang are gratefully acknowledged.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Zhao, X.; Mei, D.; Tang, G.; Zhao, C.; Wang, J.; Luo, M.; Li, L.; Wang, Y. Strain and pressure sensors based on MWCNT/PDMS for human motion/perception detection. Polymers 2023, 15, 1386. [Google Scholar] [CrossRef] [PubMed]
- Kim, D.S.; Choi, Y.W.; Shanmugasundaram, A.; Jeong, Y.J.; Park, J.; Oyunbaatar, N.E.; Kim, E.S.; Choi, M.; Lee, D.W. Highly durable crack sensor integrated with silicone rubber cantilever for measuring cardiac contractility. Nat. Commun. 2020, 11, 535. [Google Scholar] [CrossRef] [PubMed]
- Yu, M.; Zhang, Y.; Zeng, Y.; Balogun, M.S.; Mai, K.; Zhang, Z.; Lu, X.; Tong, Y. Water surface assisted synthesis of large-scale carbon nanotube film for high-performance and stretchable supercapacitors. Adv. Mater. 2014, 26, 4724–4729. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Q.; Yun, G.; Jin, S.; Chen, Z.; Tang, S.Y.; Lu, H.; Du, H.; Li, W. Silver nanoflakes-enhanced anisotropic hybrid composites for integratable pressure sensors. Nanomaterials 2022, 12, 4018. [Google Scholar] [CrossRef] [PubMed]
- Yim, C.J.; Choy, J.Y.; Youi, H.K.; Hwang, J.H.; Jo, E.B.; Lee, J.H.; Kim, H.S. Dilute polymerization of aniline on PDMS substrate via surface modification using (3-Aminopropyl) Triethoxysilane for stretchable strain sensor. Sensors 2022, 22, 2741. [Google Scholar] [CrossRef] [PubMed]
- Zhao, Y.; Lei, X.; Xu, J.; Li, Y.; Wu, W.; Guo, X.; Ren, T.; Liu, F. High-performance porous PDMS-based piezoresistive sensor prepared by a modified microwave irradiation process. ACS Appl. Electron. Mater. 2022, 4, 5498–5505. [Google Scholar] [CrossRef]
- Varghese, H.; Hakkeem, H.M.A.; Chauhan, K.; Thouti, E.; Pillai, S.; Chandran, A. A high-performance flexible triboelectric nanogenerator based on cellulose acetate nanofibers and micropatterned PDMS films as mechanical energy harvester and self-powered vibrational sensor. Nano Energy 2022, 98, 107339. [Google Scholar] [CrossRef]
- Zhou, B.; Aouraghe, M.A.; Chen, W.; Jiang, Q.; Xu, F. Highly responsive soft electrothermal actuator with high-output force based on polydimethylsiloxane (PDMS)-coated carbon nanotube (CNT) sponge. Nano Lett. 2023, 23, 6504–6511. [Google Scholar] [CrossRef] [PubMed]
- Chen, L.; Chen, X.; Zhang, Z.; Li, T.; Zhao, T.; Li, X.; Zhang, J. PDMS-based capacitive pressure sensor for flexible transparent electronics. J. Sens. 2019, 2019, 1418374. [Google Scholar] [CrossRef]
- Tas, M.O.; Baker, M.A.; Masteghin, M.G.; Bentz, J.; Boxshall, K.; Stolojan, V. Highly stretchable, directionally oriented carbon nanotube/PDMS conductive films with enhanced sensitivity as wearable strain sensors. ACS Appl. Mater. Inter. 2019, 11, 39560–39573. [Google Scholar] [CrossRef]
- Lei, X.; Guo, D.; Ye, L.; Xu, L.; Yu, S.; Tong, L.; Zhao, Y.; Li, Y.; Yi, L.; Liu, F. Highly sensitive, ultrawide range, and multimodal flexible pressure sensor with hierarchical microstructure prepared by a one-step laser printing process. Adv. Mater. Technol. 2023, 8, 2202065. [Google Scholar] [CrossRef]
- Li, M.; Chen, S.; Fan, B.; Wu, B.; Guo, X. Printed flexible strain sensor array for bendable interactive surface. Adv. Funct. Mater. 2020, 30, 2003214. [Google Scholar] [CrossRef]
- Wang, D.; Zhou, X.; Song, R.; Fang, C.; Wang, Z.; Wang, C.; Huang, Y. Freestanding silver/polypyrrole composite film for multifunctional sensor with biomimetic micropattern for physiological signals monitoring. Chem. Eng. J. 2021, 404, 126940. [Google Scholar] [CrossRef]
- Fan, H.; Li, K.; Li, Q.; Hou, C.; Zhang, Q.; Li, Y.; Jin, W.; Wang, H. Prepolymerization-assisted fabrication of an ultrathin immobilized layer to realize a semi-embedded wrinkled AgNW network for a smart electrothermal chromatic display and actuator. J. Mater. Chem. C 2017, 5, 9778–9785. [Google Scholar] [CrossRef]
- Gong, X.; Yu, H.; Chen, X.; Xu, P.; Wang, H. Superhydrophobic PDMS/PPy-Ag/Graphene/PET films with highly efficient electromagnetic interference shielding, UV shielding, self-cleaning and electrothermal deicing. Mater. Today Phys. 2023, 34, 101076. [Google Scholar] [CrossRef]
- Shu, Q.; Liao, G.J.; Liu, S.; Deng, H.X.; Pang, H.M.; Xu, Z.B.; Gong, X.L.; Xuan, S.H. An electrothermal and magnetic dual-modal actuator toward soft self-sensing robots. Adv. Mater. Technol. 2023, 8, 2300019. [Google Scholar] [CrossRef]
- Xie, J.; Wei, S.; Lu, W.; Wu, S.; Zhang, Y.; Wang, R.; Zhu, N.; Chen, T. Environment-interactive programmable deformation of electronically innervated synergistic fluorescence-color/shape changeable hydrogel actuators. Small 2023, 19, 2304204. [Google Scholar] [CrossRef]
- Jiang, S.; Guo, W.; Liu, S.; Huang, X.; Li, Y.; Li, Z.; Wu, H.; Yin, Z. Grab and heat: Highly responsive and shape adaptive soft robotic heaters for effective heating of objects of three-dimensional curvilinear surfaces. ACS Appl. Mater. Interfaces 2019, 11, 47476–47484. [Google Scholar] [CrossRef] [PubMed]
- Sang, M.; Liu, G.H.; Liu, S.; Wu, Y.; Xuan, S.H.; Wang, S.; Xuan, S.Y.; Jiang, W.Q.; Gong, X.L. Flexible PTFE/MXene/PI soft electrothermal actuator with electromagnetic-interference shielding property. Chem. Eng. J. 2021, 414, 128883. [Google Scholar] [CrossRef]
- Choi, D.S.; Kim, T.H.; Lee, S.H.; Pang, C.; Bae, J.W.; Kim, S.Y. Beyond human hand: Shape-adaptive and reversible magnetorheological elastomer-based robot gripper skin. ACS Appl. Mater. Interfaces 2020, 12, 44147–44155. [Google Scholar] [CrossRef]
- Christie, M.D.; Sun, S.S.; Ning, D.H.; Du, H.; Zhang, S.W.; Li, W.H. A torsional MRE joint for a C-shaped robotic leg. Smart Mater Struct. 2017, 26, 015002. [Google Scholar] [CrossRef]
- Hong, S.; Um, Y.; Park, J.; Park, H.W. Agile and versatile climbing on ferromagnetic surfaces with a quadrupedal robot. Sci. Robot. 2022, 7, eadd1017. [Google Scholar] [CrossRef]
- Sun, C.L.; Cao, X.F.; Zhou, X.L.; Gong, X.L.; Xuan, S.H. Deformation dependent sound absorption property of a novel magnetorheological membrane sound absorber. Front. Mater. 2020, 30, 598973. [Google Scholar] [CrossRef]
- Tang, S.Y.; Zhang, X.; Sun, S.; Yuan, D.; Zhao, Q.; Yan, S.; Deng, L.; Yun, G.; Zhang, J.; Zhang, S.W.; et al. Versatile microfluidic platforms enabled by novel magnetorheological elastomer microactuators. Adv. Funct. Mater. 2018, 28, 1705484. [Google Scholar] [CrossRef]
- Cao, X.F.; Xuan, S.H.; Sun, S.S.; Xu, Z.B.; Li, J.; Gong, X.L. 3D printing magnetic actuators for biomimetic applications. ACS Appl. Mater. Interfaces 2021, 13, 30127–30136. [Google Scholar] [CrossRef]
- Hu, T.; Xuan, S.H.; Ding, L.; Gong, X.L. Stretchable and magneto-sensitive strain sensor based on silver nanowire-polyurethane sponge enhanced magnetorheological elastomer. Mater. Design 2018, 156, 528–537. [Google Scholar] [CrossRef]
- Lee, S.; Shin, S.; Lee, S.; Seo, J.; Lee, J.; Son, S.; Cho, H.J.; Algadi, H.; Al-Sayari, S.; Kim, D.E.; et al. Ag nanowire reinforced highly stretchable conductive fibers for wearable electronics. Adv. Funct. Mater. 2015, 25, 3114–3121. [Google Scholar] [CrossRef]
- Chae, W.H.; Patil, J.J.; Grossman, J.C. Conformal encapsulation of silver nanowire transparent electrodes by nanosized reduced graphene oxide leading to improved all-round stability. ACS Appl. Mater. Interfaces 2022, 14, 34997–35009. [Google Scholar] [CrossRef]
- Wang, Y.; Du, D.; Yang, X.; Zhang, X.; Zhao, Y. Optoelectronic and electrothermal properties of transparent conductive silver nanowires films. Nanomaterials 2019, 9, 904. [Google Scholar] [CrossRef]
- Gao, Q.; Kopera, B.A.F.; Zhu, J.; Liao, X.; Gao, C.; Retsch, M.; Agarwal, S.; Greiner, A. Breathable and flexible polymer membranes with mechanoresponsive electric resistance. Adv. Funct. Mater. 2020, 30, 1907555. [Google Scholar] [CrossRef]
- Piedrahita-Bello, M.; Zan, Y.; Enriquez-Cabrera, A.; Molnár, G.; Tondu, B.; Salmon, L.; Bousseksou, A. Effect of the spin crossover filler concentration on the performance of composite bilayer actuators. Chem. Phys. Lett. 2022, 793, 139438. [Google Scholar] [CrossRef]
- Cao, X.F.; Xuan, S.H.; Hu, T.; Gong, X.L. 3D printing-assistant method for magneto-active pulse pump: Experiment, simulation, and deformation theory. Appl. Phys. Lett. 2020, 117, 241901. [Google Scholar] [CrossRef]
- Yang, C.; Gu, H.; Lin, W.; Yuen, M.M.; Wong, C.P.; Xiong, M.; Gao, B. Silver nanowires: From scalable synthesis to recyclable foldable electronics. Adv. Mater. 2011, 23, 3052–3056. [Google Scholar] [CrossRef] [PubMed]
- Liu, X.; Wang, L.; Xiang, Y.; Liao, F.; Li, N.; Li, J.; Wang, J.; Wu, Q.; Zhou, C.; Yang, Y.; et al. Magnetic soft microfiberbots for robotic embolization. Sci. Robot. 2024, 9, eadh2479. [Google Scholar] [CrossRef] [PubMed]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).