
High-Precision Position Tracking Control with a Hysteresis Observer Based on the Bouc–Wen Model for Smart Material-Actuated Systems


Abstract
1. Introduction
2. Observer Design for Bouc–Wen Models
2.1. Bouc–Wen Model
2.2. Design of the Hysteresis Observer
3. Position Tracking Controller
4. Simulation Results
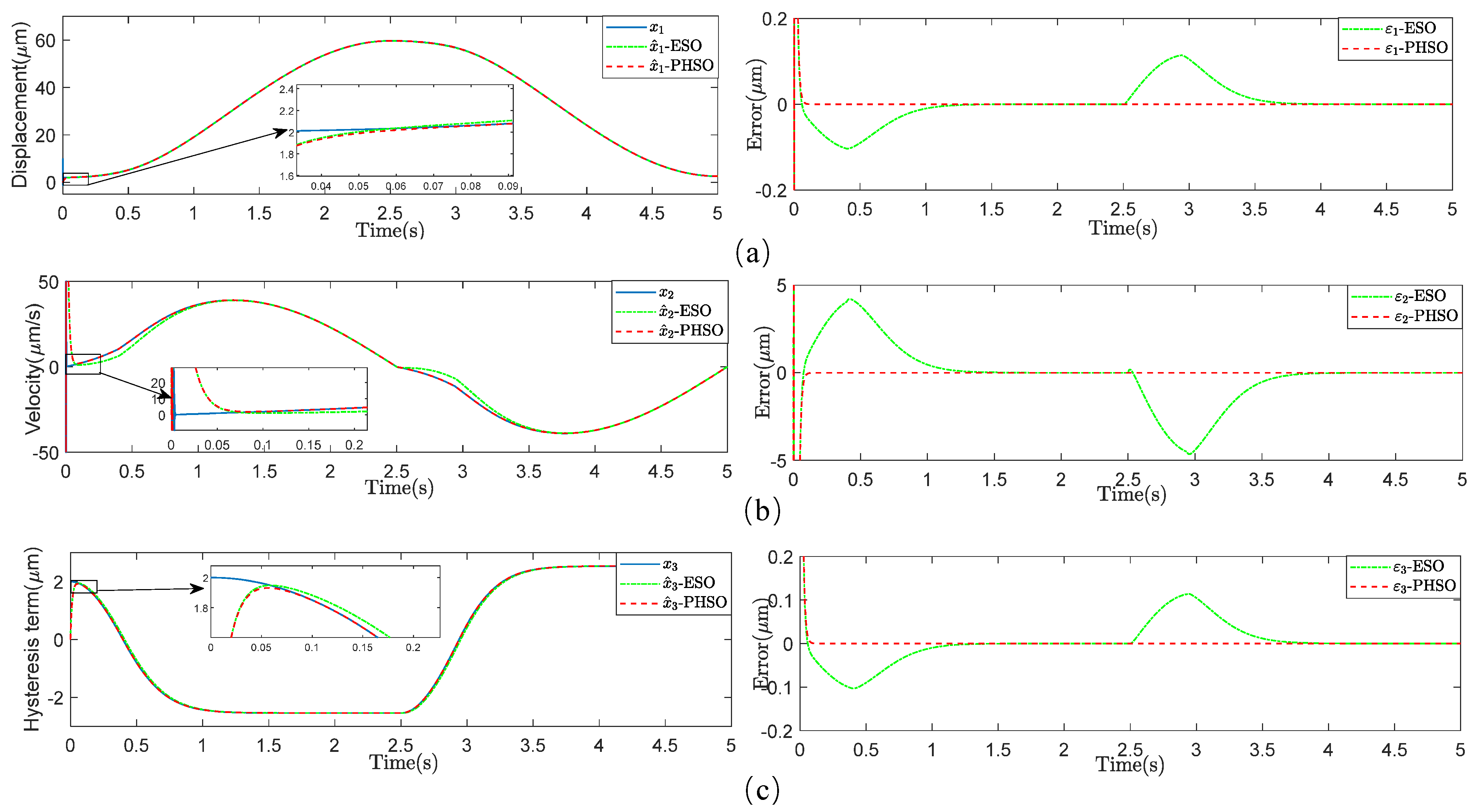
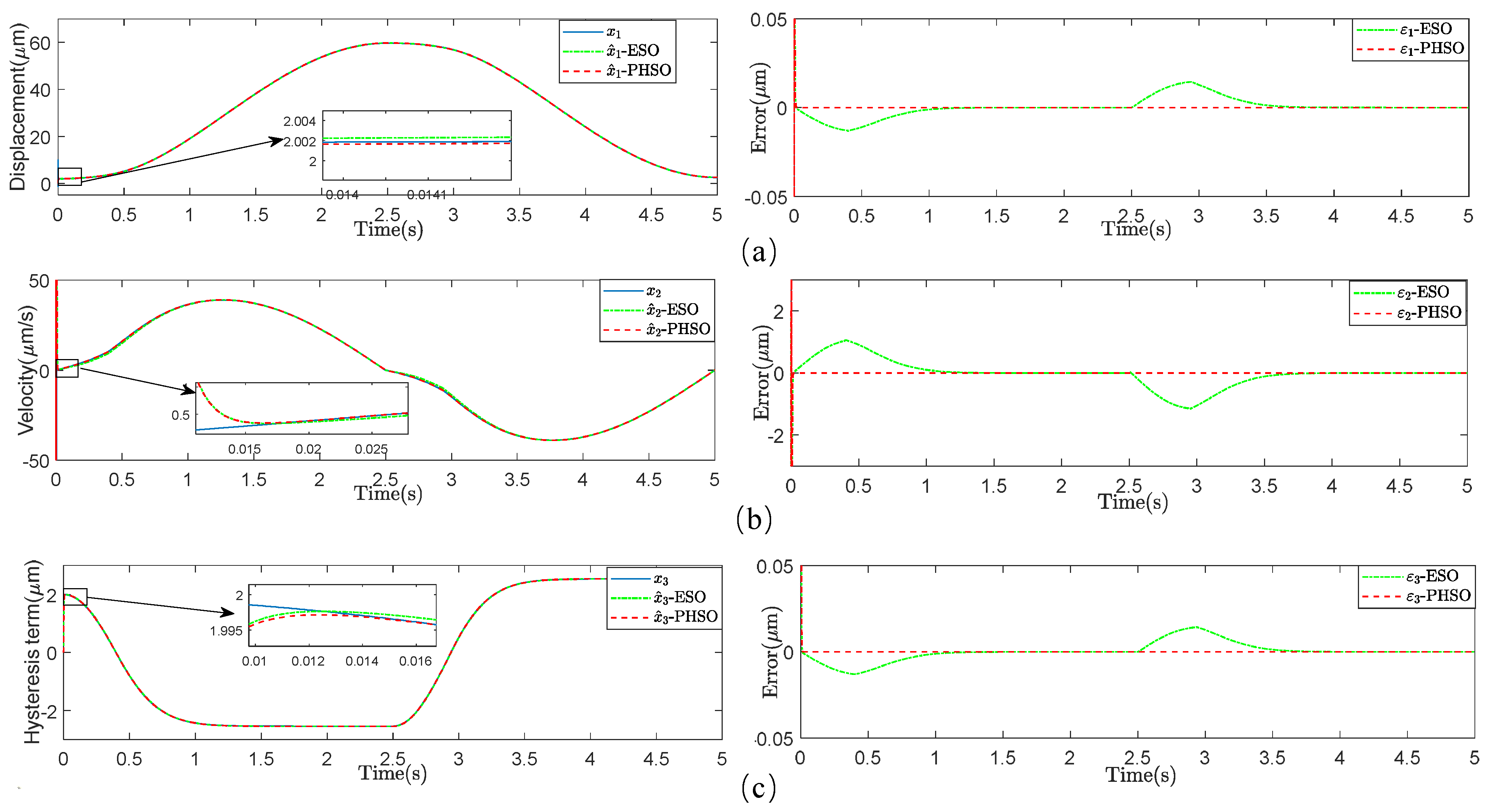
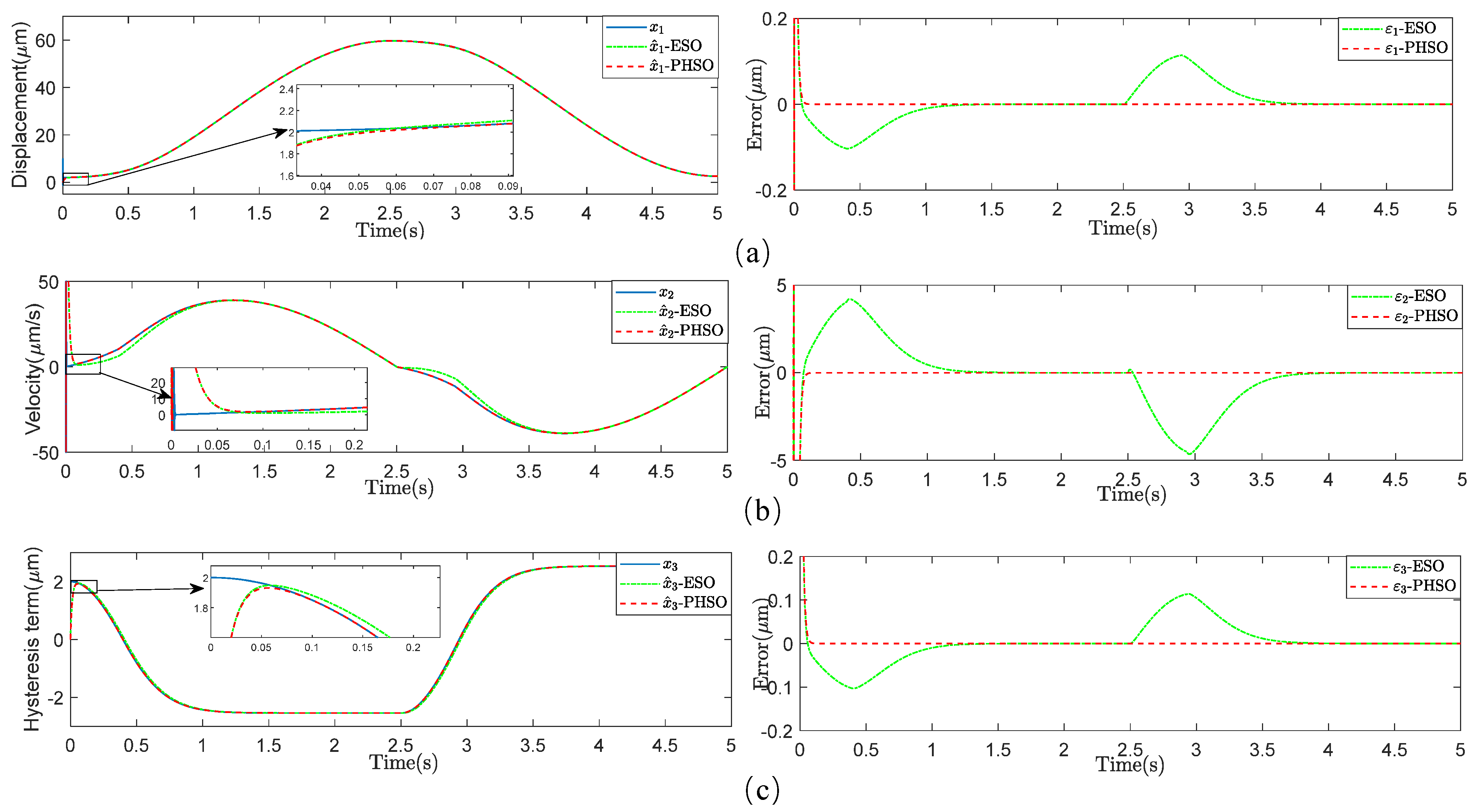
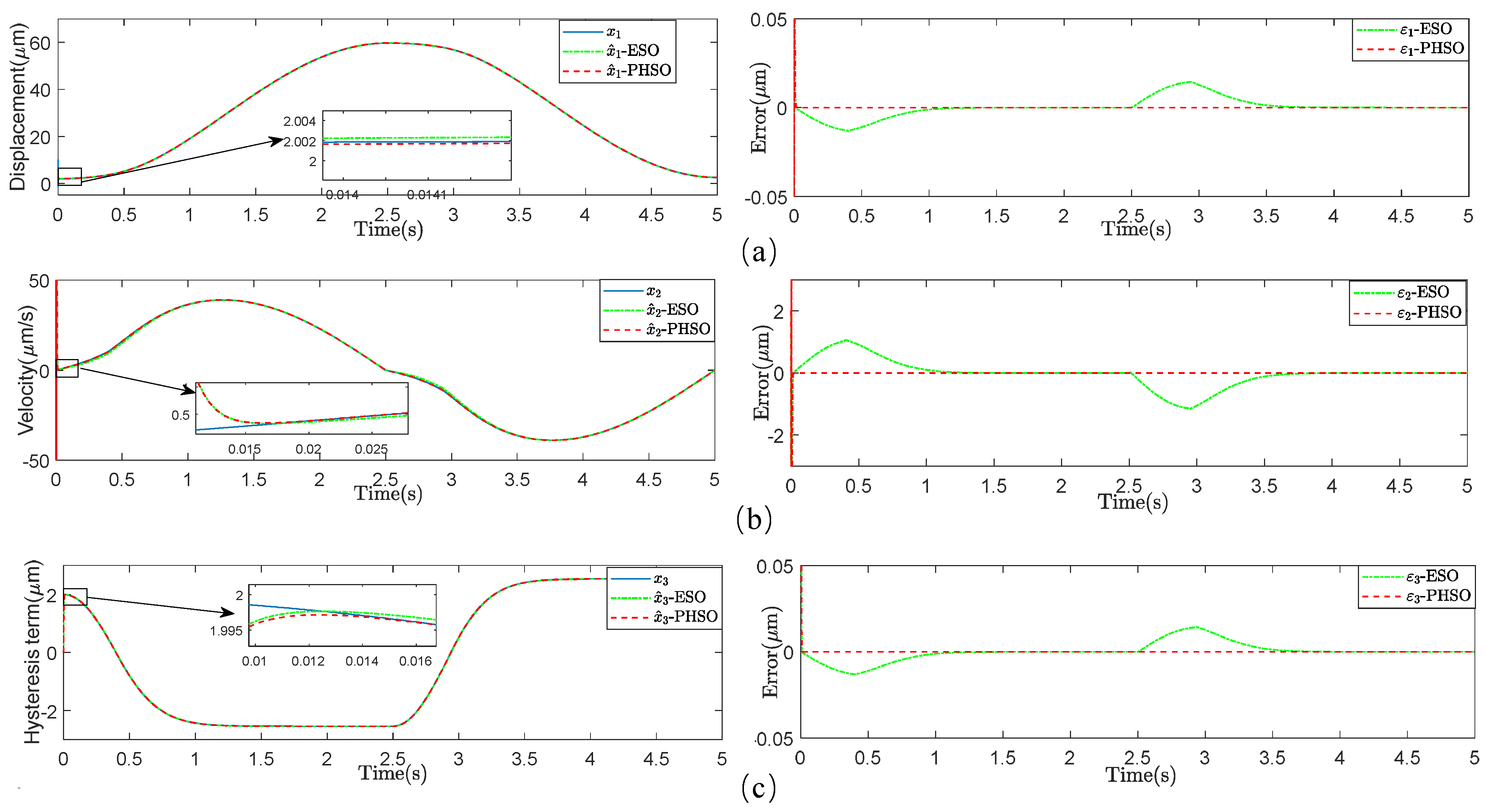
4.1. Hysteresis Observer Performance
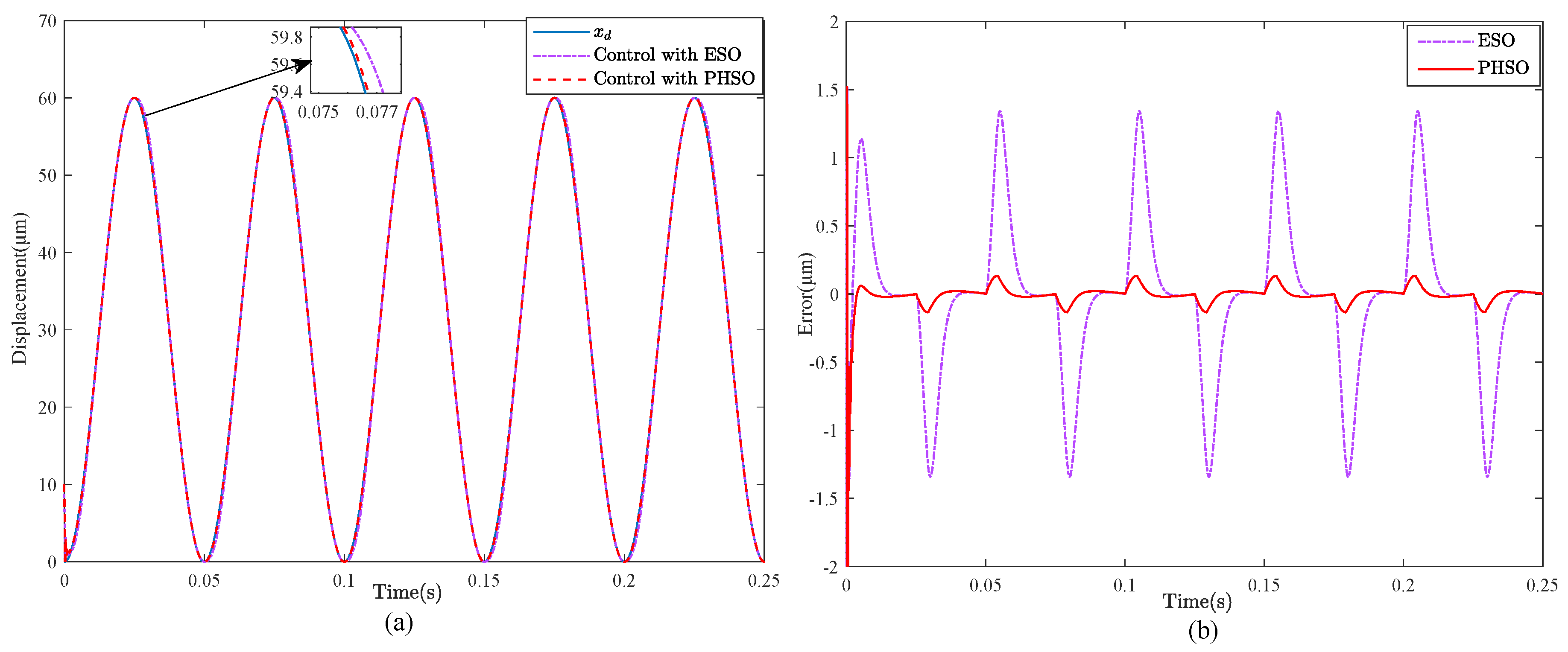
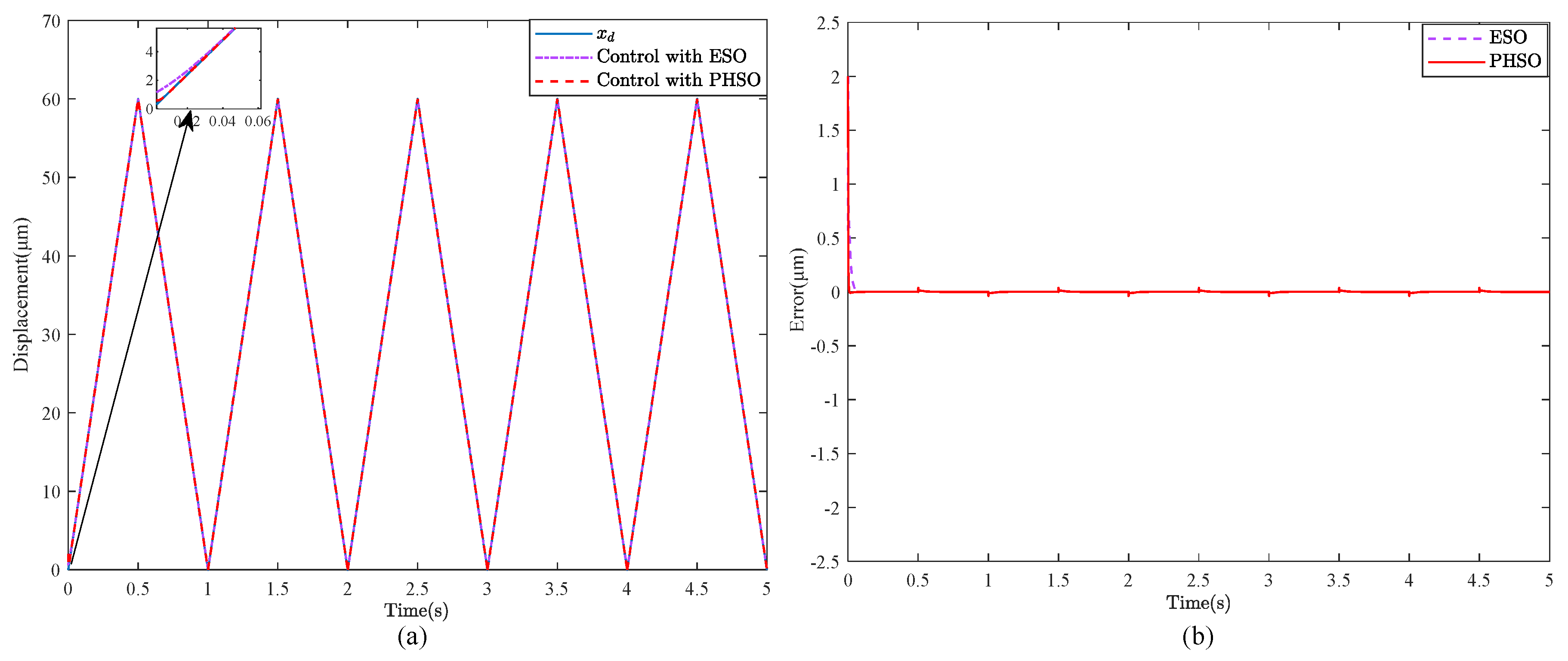
4.2. Output-Feedback Position Tracking Controller Performance
5. Experimental Results
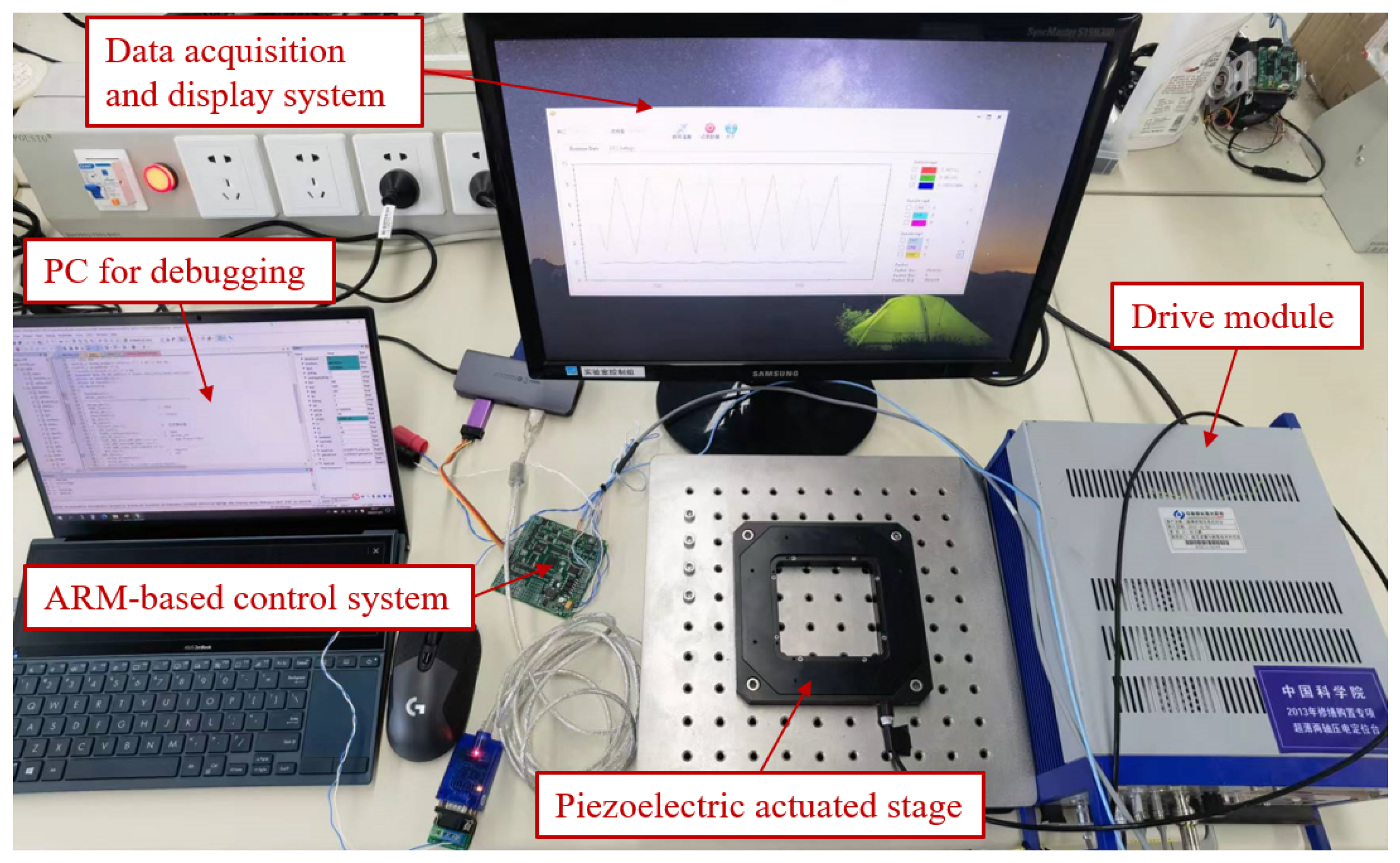
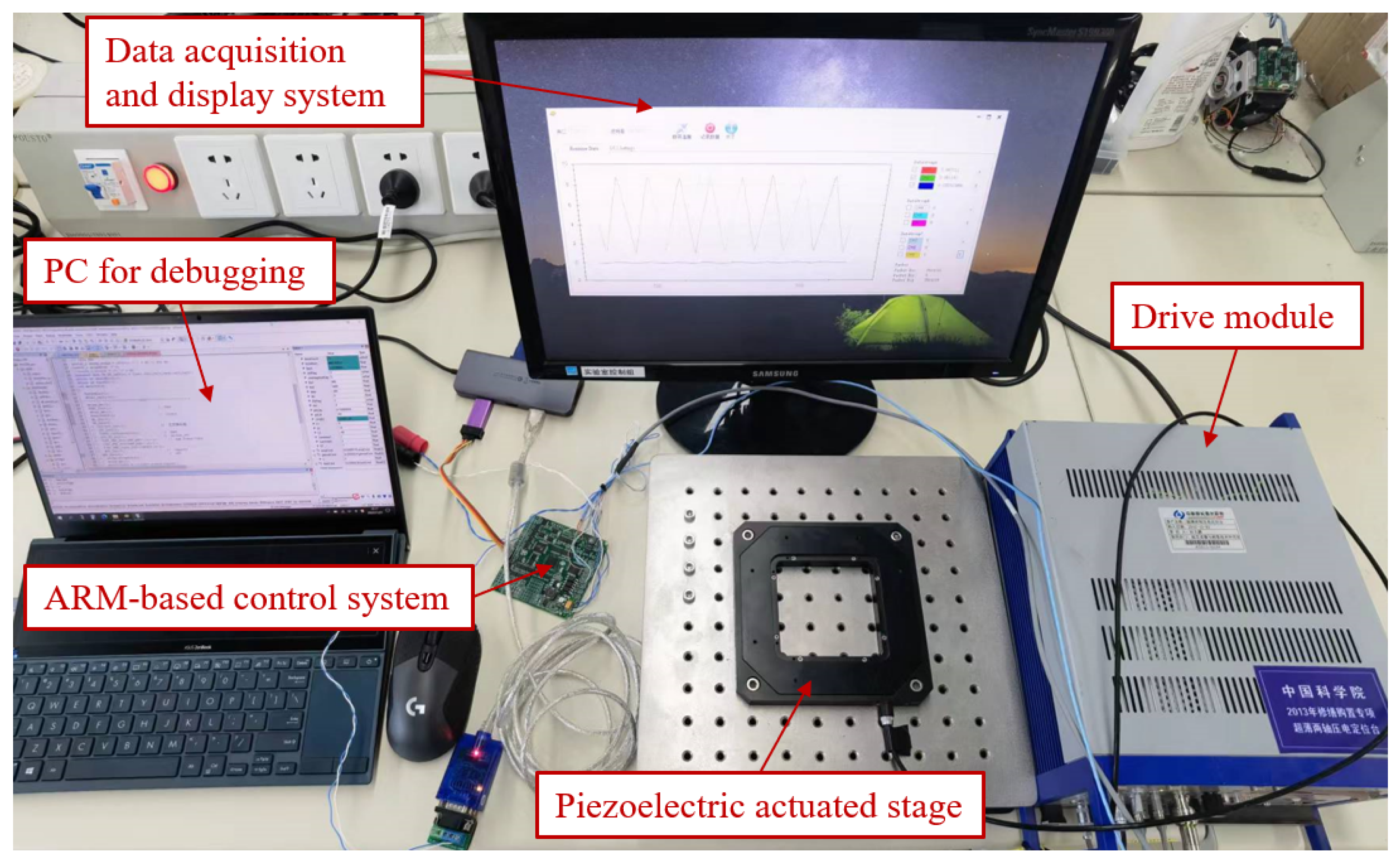
5.1. Experimental System and Parameters Setting
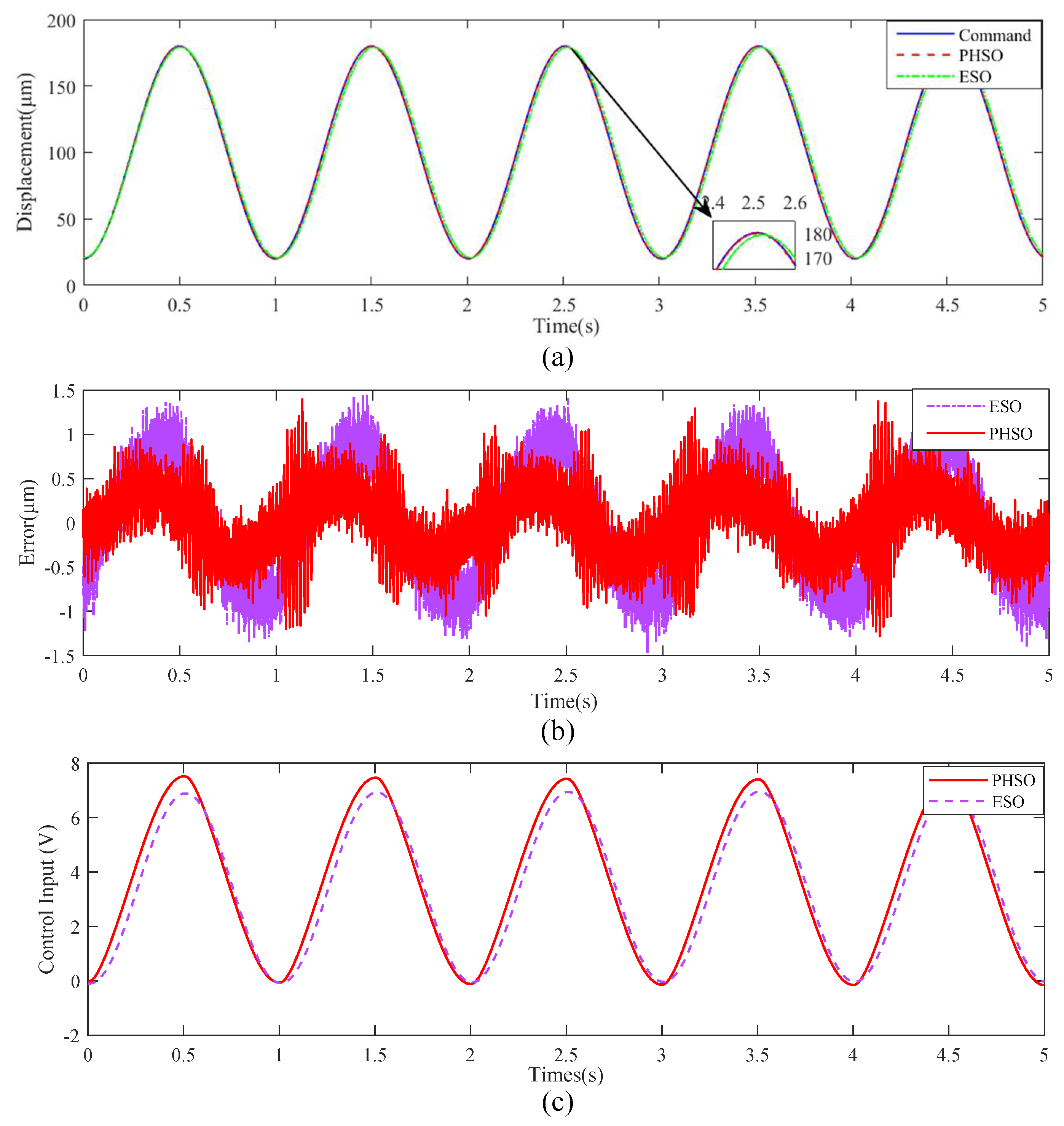
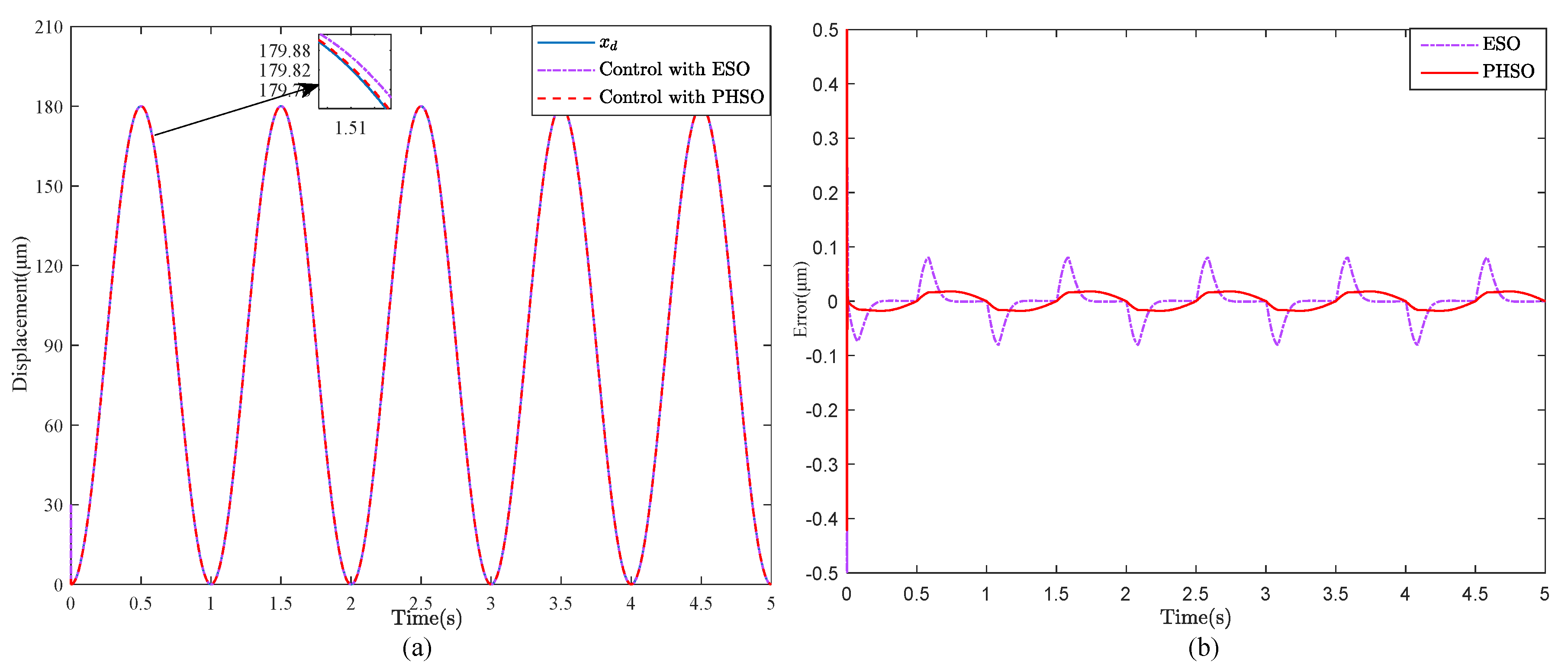
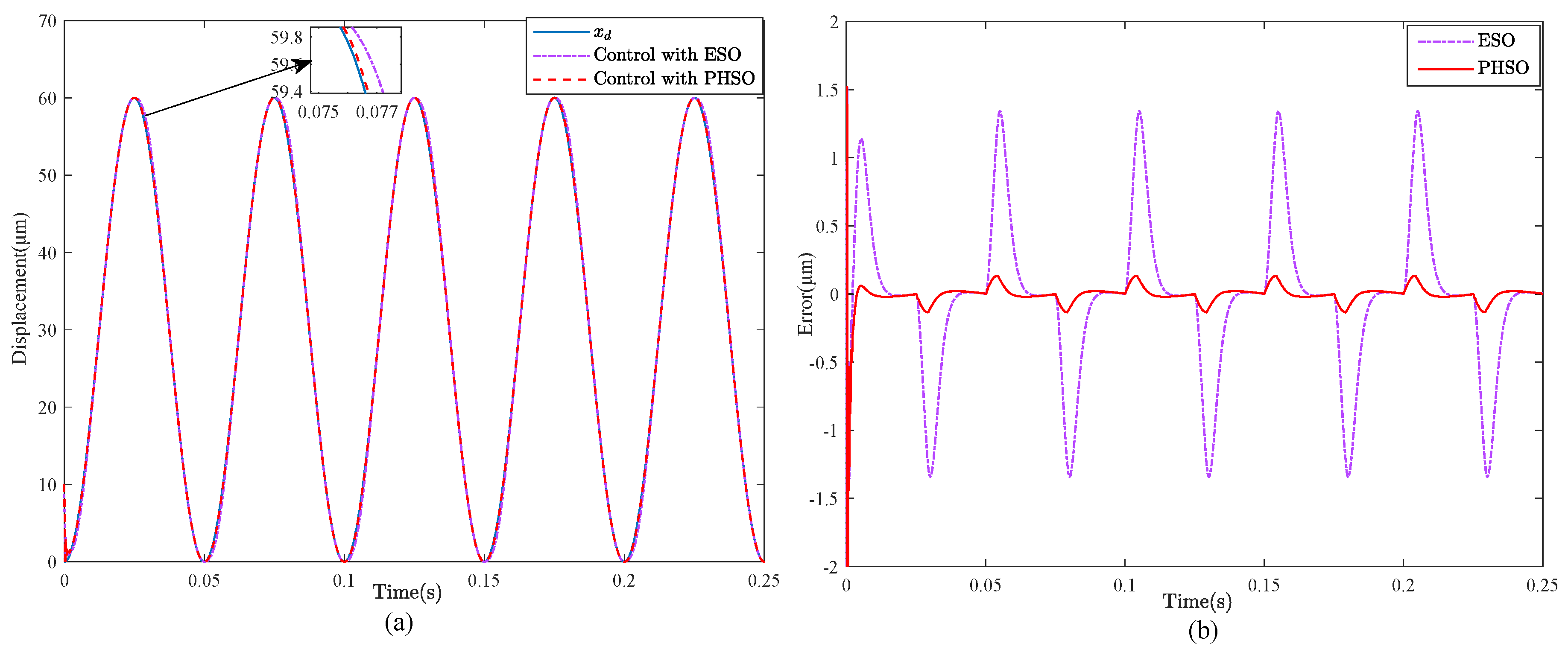
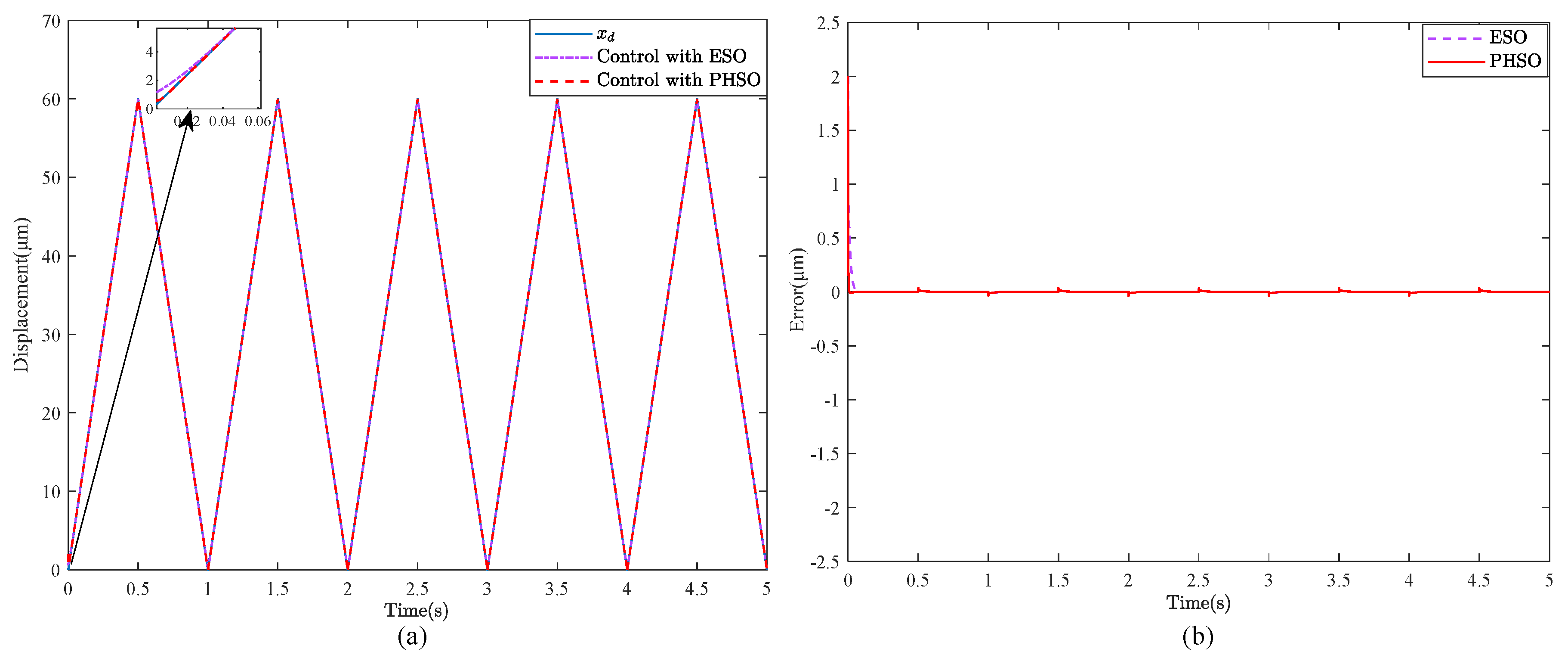
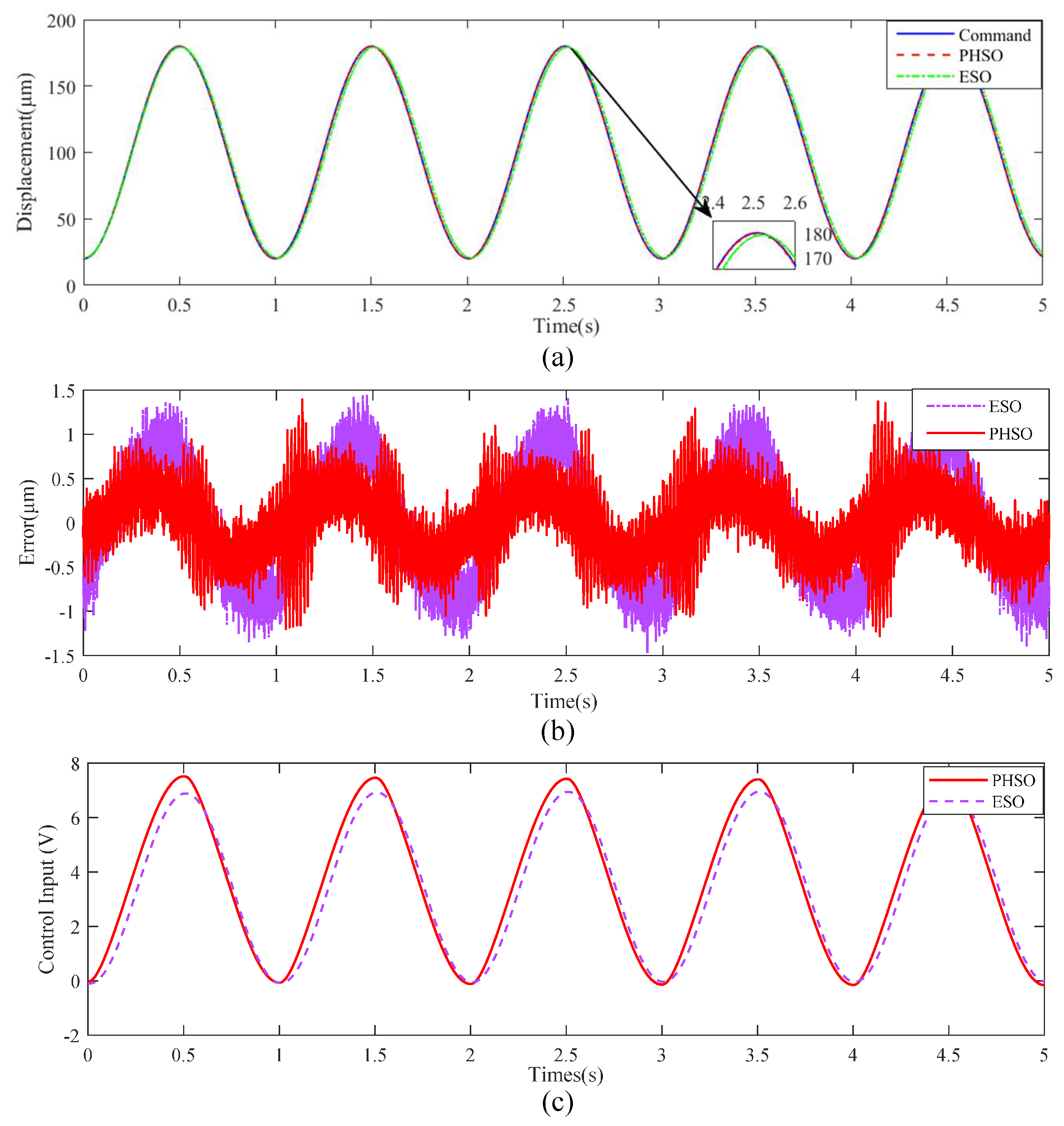
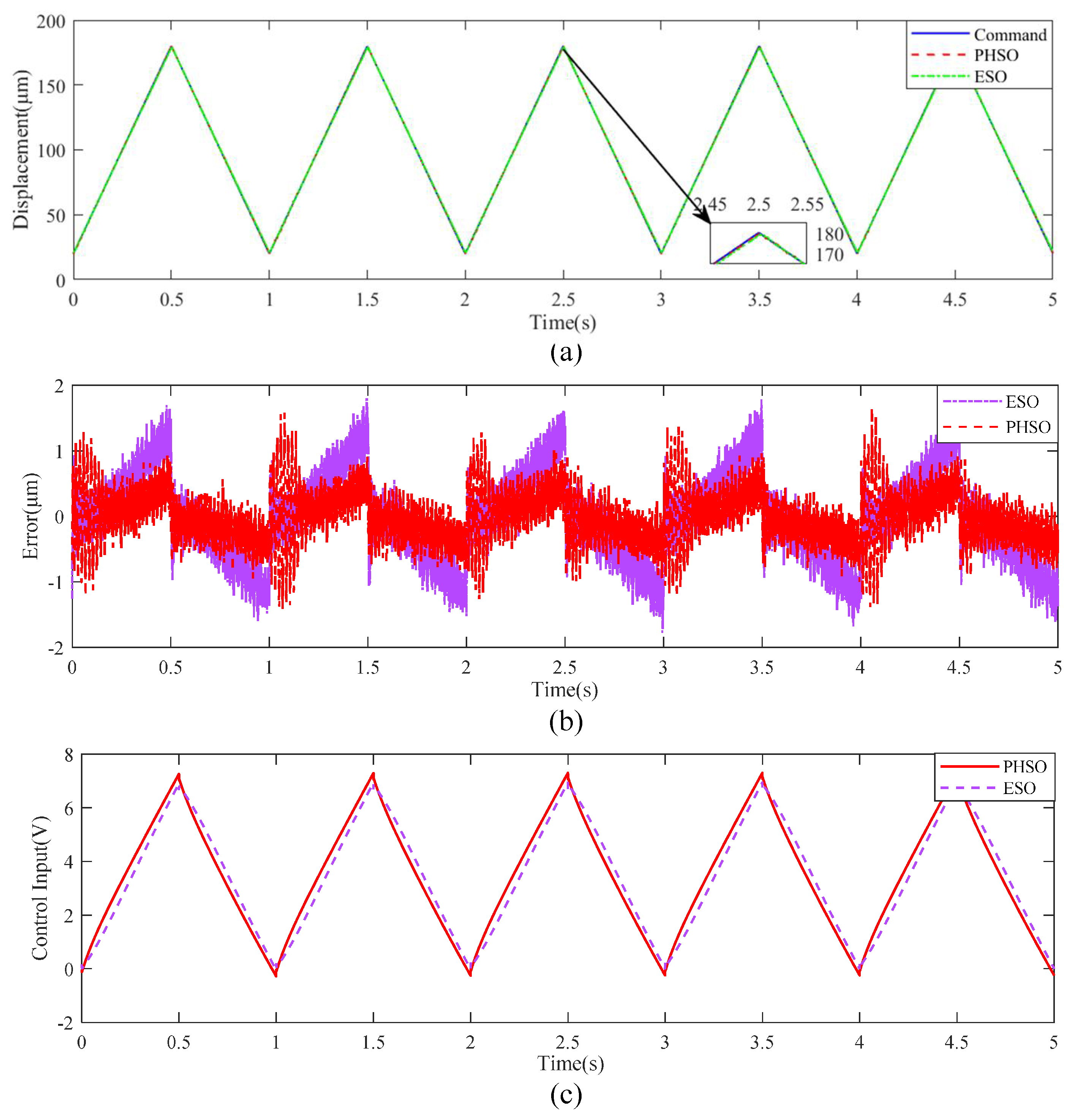
5.2. Proposed Position Tracking Controller Performance
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Jin, M.; Jinoh, L.; Kyung, K.A. Continuous nonsingular terminal sliding-mode control of shape memory alloy actuators using time delay estimation. IEEE/ASME Trans. Mech. 2015, 20, 899–909. [Google Scholar] [CrossRef]
- Zhang, C.; Zhou, M.; Nie, L.; Zhang, X.; Su, C.Y. Prandtl-Ishlinskii model based event-triggered prescribed control: Design and application to piezoelectric-driven micropositioning stage. Mech. Syst. Signal. Process. 2023, 200, 110562. [Google Scholar] [CrossRef]
- Tan, X.; John, S.B. Modeling and control of hysteresis in magnetostrictive actuators. Automatica 2004, 40, 1469–1480. [Google Scholar] [CrossRef]
- Mohammad, A.; Rakotondrabe, M.; Al-Darabsah, I.; Aljanaideh, O. Internal model-based feedback control design for inversion-free feedforward rate-dependent hysteresis compensation of piezoelectric cantilever actuator. Control Eng. Pract. 2018, 72, 29–41. [Google Scholar]
- Nie, L.; Zhou, M.; Cao, W.; Huang, X. Improved Nonlinear Extended Observer Based Adaptive Fuzzy Output Feedback Control for a Class of Uncertain Nonlinear Systems with Unknown Input Hysteresis. IEEE Trans. Fuzzy Syst. 2023, 31, 3679–3689. [Google Scholar] [CrossRef]
- Xu, R.; Tian, D.; Wang, Z. Adaptive Disturbance Observer-Based Local Fixed-Time Sliding Mode Control with an Improved Approach Law for Motion Tracking of Piezo-Driven Microscanning Systems. IEEE Trans. Ind. Electron. 2024. early access. [Google Scholar] [CrossRef]
- Rosenbaum, S.; Ruderman, M.; Strohla, T.; Bertram, T. Use of Jiles-Atherton and Preisach hysteresis models for inverse feed-forward control. IEEE Trans. Magn. 2010, 46, 3984–3989. [Google Scholar] [CrossRef]
- Smith, R.; Ounaie, Z. A domain wall model for hysteresis in piezoelectric materials. J. Intell. Mater. Syst. Struct. 2000, 11, 62–79. [Google Scholar] [CrossRef]
- Edardar, M.; Tan, X.; Khalil, H.K. Design and analysis of sliding mode controller under approximate hysteresis compensation. IEEE Trans. Control Syst. Technol. 2015, 23, 598–608. [Google Scholar] [CrossRef]
- Li, Z.; Zhang, X.; Su, C.Y.; Chai, T. Nonlinear control of systems preceded by Preisach hysteresis description: A prescribed adaptive control approach. IEEE Trans. Control Syst. Technol. 2016, 24, 451–460. [Google Scholar] [CrossRef]
- Li, Z.; Shan, J.; Gabbert, U. Inverse compensation of hysteresis using Krasnoselskii-Pokrovskii model. IEEE/ASME Trans. Mech. 2018, 23, 966–971. [Google Scholar] [CrossRef]
- Xu, R.; Wang, Z.; Zhou, M.; Tian, D. A robust fractional-order sliding mode control technique for piezoelectric nanopositioning stages in trajectory-tracking applications. Sens. Actuators A 2023, 363, 114711. [Google Scholar] [CrossRef]
- Wang, X.; Alici, G.; Tan, X. Modeling and inverse feedforward control for conducting polymer actuator with hysteresis. Smart Mater. Struct. 2014, 23, 025015. [Google Scholar] [CrossRef]
- Ibrir, S.; Su, C.Y. Adaptive stabilization of a class of feedforward nonlinear systems subject to unknown backlash-hysteresis inputs. IEEE Trans. Control Syst. Technol. 2017, 25, 1180–1192. [Google Scholar] [CrossRef]
- Rakotondrabe, M. Bouc-Wen modeling and inverse multiplicative structure to compensate hysteresis nonlinearity in piezoelectric actuators. IEEE Trans. Autom. Sci. Eng. 2011, 8, 428–431. [Google Scholar] [CrossRef]
- Delibas, B.; Arockiarajan, A.; Seemann, W. Rate dependent properties of perovskite type tetragonal piezoelectric materials using micromechanical model. Int. J. Solids Struct. 2006, 43, 697–712. [Google Scholar] [CrossRef]
- Yang, M.; Li, C.; Gu, G.; Zhu, L. Modeling and compensating the dynamic hysteresis of piezoelectric actuators via a modified rate-dependent Prandtl–Ishlinskii model. Smart Mater. Struct. 2015, 24, 125006. [Google Scholar] [CrossRef]
- Xu, R.; Tian, D.; Zhou, M. A rate-dependent KP modeling and direct compensation control technique for hysteresis in piezo-nanopositioning stages. J. Intell. Mater. Syst. Struct. 2022, 33, 629–640. [Google Scholar] [CrossRef]
- Zhu, W.; Rui, X. Hysteresis modeling and displacement control of piezoelectric actuators with the frequency-dependent behavior using a generalized Bouc-Wen model. Precis. Eng. 2016, 43, 299–307. [Google Scholar] [CrossRef]
- Ramli, M.; Minh, T.; Chen, X. Pseudoextended Bouc-Wen model and adaptive control design with applications to smart actuators. IEEE Trans. Control Syst. Technol. 2019, 27, 2100–2109. [Google Scholar] [CrossRef]
- Wang, Z.; Xu, R.; Wang, L.; Tian, D. Finite-time adaptive sliding mode control for high-precision tracking of piezo-actuated stages. ISA Trans. 2022, 129, 436–445. [Google Scholar] [CrossRef] [PubMed]
- Yu, S.; Feng, Y.; Yang, X. Extended state observer–based fractional order sliding-mode control of piezoelectric actuators. J. Syst. Control Eng. 2021, 235, 39–51. [Google Scholar] [CrossRef]
- Wang, Z.; Zhang, Z.; Mao, J. Precision tracking control of piezoelectric actuator based on Bouc-Wen hysteresis compensator. Electron. Lett. 2012, 48, 1459–1460. [Google Scholar] [CrossRef]
- Habineza, D.; Rakotondrabe, M.; Gorrec, Y. Bouc-Wen modeling and feedforward control of multivariable hysteresis in piezoelectric systems: Application to a 3-dof piezotube scanner. IEEE Trans. Control Syst. Technol. 2015, 23, 1797–1806. [Google Scholar] [CrossRef]
- Li, Y.; Xu, Q. Adaptive sliding mode control with perturbation estimation and PID sliding surface for motion tracking of a piezo-driven micromanipulator. IEEE Trans. Control Syst. Technol. 2010, 18, 798–810. [Google Scholar] [CrossRef]
- Sofla, M.; Rezaei, S.; Areinejad, Z.; Saadat, M. Hysteresis-observer based robust tracking control of piezoelectric actuators. Am. Control Conf. 2010, 1, 4187–4192. [Google Scholar]
- Wu, Y.; Ma, H.; Chen, M.; Li, H. Observer-based fixed-time adaptive fuzzy bipartite containment control for multiagent systems with unknown hysteresis. IEEE Trans. Fuzzy Syst. 2022, 30, 1302–1312. [Google Scholar] [CrossRef]
- Bouc, R. Forced vibration of mechanical systems with hysteresis. In Proceedings of the Fourth Conference on Nonlinear Oscillations, Prague, Czech Republic, 5–9 September 1967; p. 315. [Google Scholar]
- Wen, Y. Method for random vibration of hysteretic systems. J. Eng. Mech. Div. 1976, 102, 249–263. [Google Scholar] [CrossRef]
- Ioannou, P.; Sun, J. Robust Adaptive Control; CRC Press: Boca Raton, FL, USA, 1996; p. 75. [Google Scholar]
- Izadbakhsh, A.; Kheirkhahan, P. Nonlinear PID control of electrical flexible joint robots-Theory and experimental verification. In Proceedings of the 2018 IEEE International Conference on Industrial Technology (ICIT), Lyon, France, 19–22 February 2018; pp. 250–255. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Frequency | Criteria | Controller with ESO | Controller with PHSO | Improved |
|---|---|---|---|---|
| MAXE (m) | 0.2406 | 0.0219 | 90.89% | |
| 1 Hz (sine) | ME (m) | 0.0516 | 0.0053 | 89.73% |
| RMSE (m) | 0.2078 | 0.0098 | 95.28% | |
| MAXE (m) | 4.0237 | 0.4043 | 89.95% | |
| 20 Hz (sine) | ME (m) | 1.0313 | 0.1051 | 89.81% |
| RMSE (m) | 2.0451 | 0.1554 | 92.40% | |
| MAXE (m) | 3.1032 | 0.0639 | 97.94% | |
| triangular | ME (m) | 0.0623 | 0.0082 | 87.15% |
| RMSE (m) | 0.2431 | 0.0145 | 94.24% |
| Signal | Criteria | Controller with ESO | Controller with PHSO | Improved |
|---|---|---|---|---|
| MAXE (m) | 1.5619 | 1.3960 | 10.62% | |
| Sine | ME (m) | 0.5915 | 0.3178 | 46.27% |
| RMSE (m) | 0.6646 | 0.3804 | 42.76% | |
| MAXE (m) | 1.7983 | 1.6593 | 7.73% | |
| Triangle | ME (m) | 0.5286 | 0.2976 | 43.70% |
| RMSE (m) | 0.6583 | 0.3764 | 42.82% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, J.; Li, Y.; Cao, Y.; Zhang, F.; Cui, M.; Xu, R. High-Precision Position Tracking Control with a Hysteresis Observer Based on the Bouc–Wen Model for Smart Material-Actuated Systems. Actuators 2024, 13, 105. https://doi.org/10.3390/act13030105
Zhao J, Li Y, Cao Y, Zhang F, Cui M, Xu R. High-Precision Position Tracking Control with a Hysteresis Observer Based on the Bouc–Wen Model for Smart Material-Actuated Systems. Actuators. 2024; 13(3):105. https://doi.org/10.3390/act13030105
Chicago/Turabian StyleZhao, Jubo, Yaobin Li, Yonggang Cao, Fukai Zhang, Ming Cui, and Rui Xu. 2024. "High-Precision Position Tracking Control with a Hysteresis Observer Based on the Bouc–Wen Model for Smart Material-Actuated Systems" Actuators 13, no. 3: 105. https://doi.org/10.3390/act13030105
APA StyleZhao, J., Li, Y., Cao, Y., Zhang, F., Cui, M., & Xu, R. (2024). High-Precision Position Tracking Control with a Hysteresis Observer Based on the Bouc–Wen Model for Smart Material-Actuated Systems. Actuators, 13(3), 105. https://doi.org/10.3390/act13030105