Can Pressure Data from Wearable Insole Devices Be Utilized to Estimate Low Back Moments for Exoskeleton Control System?

Abstract
1. Introduction
2. Proposed Strategy Based on Deep and Transfer Learning
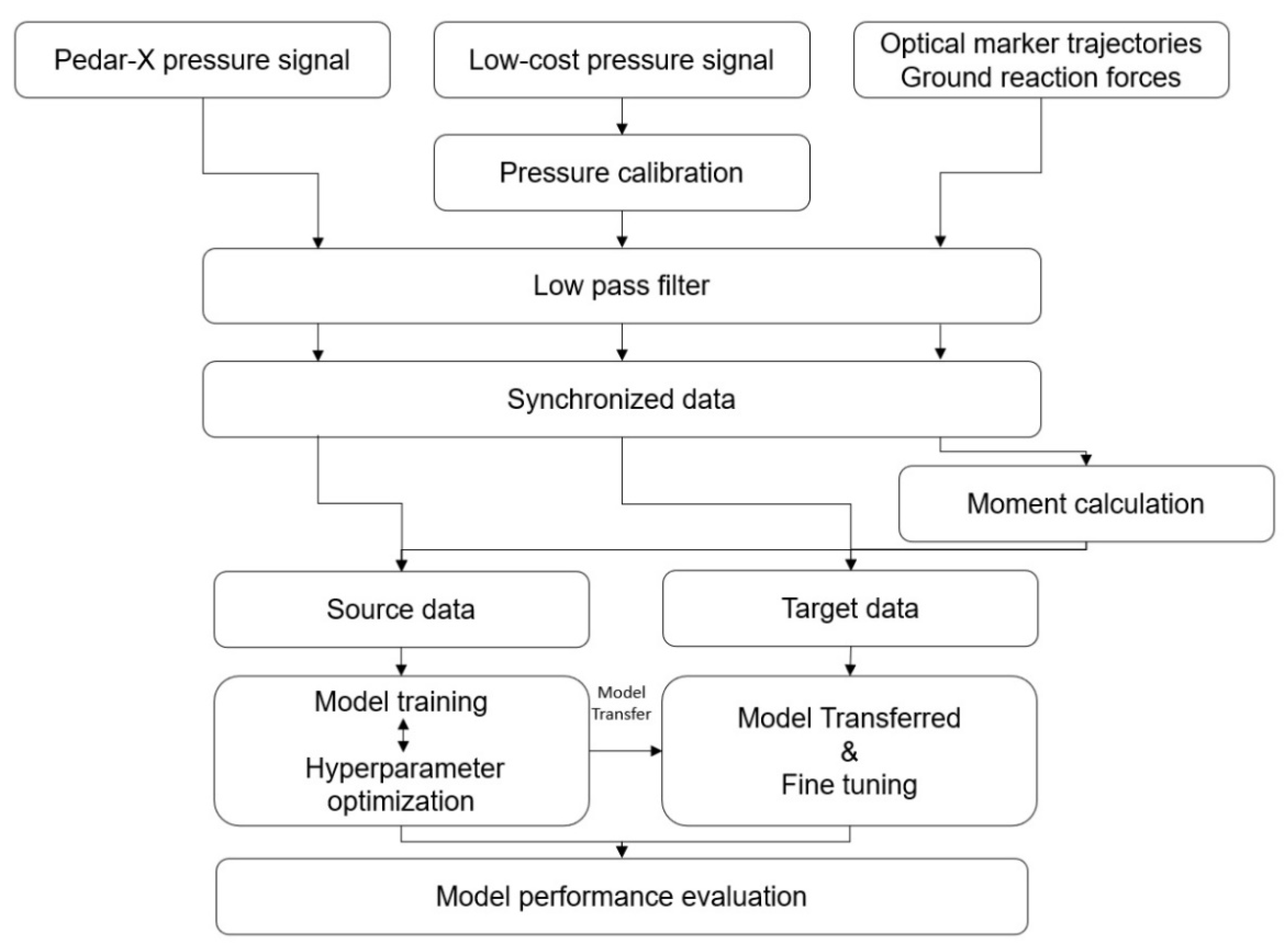
2.1. Preprocessing
2.2. Deep Learning
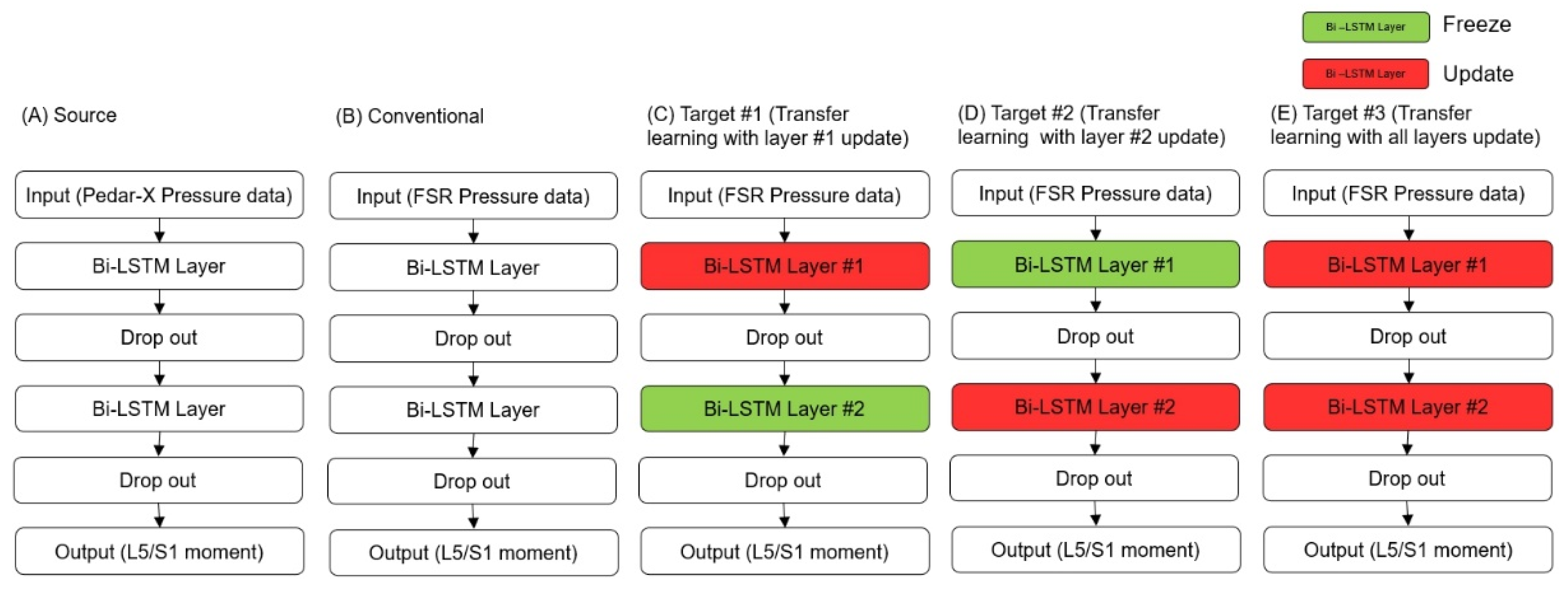
2.3. Transfer Learning
3. Experiments
3.1. Subject
3.2. Apparatus
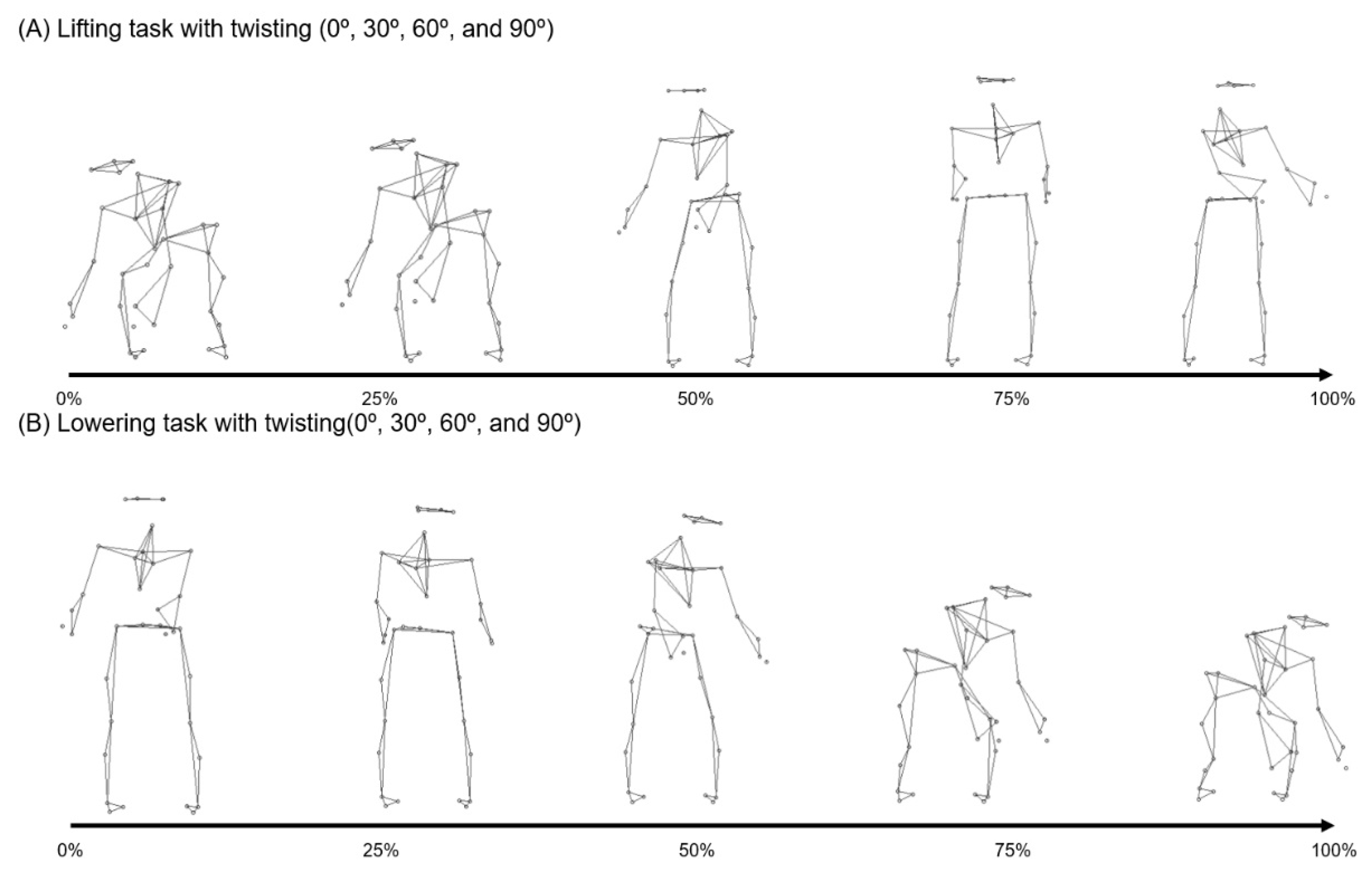
3.3. Experimental Protocols
4. Performance Evaluation
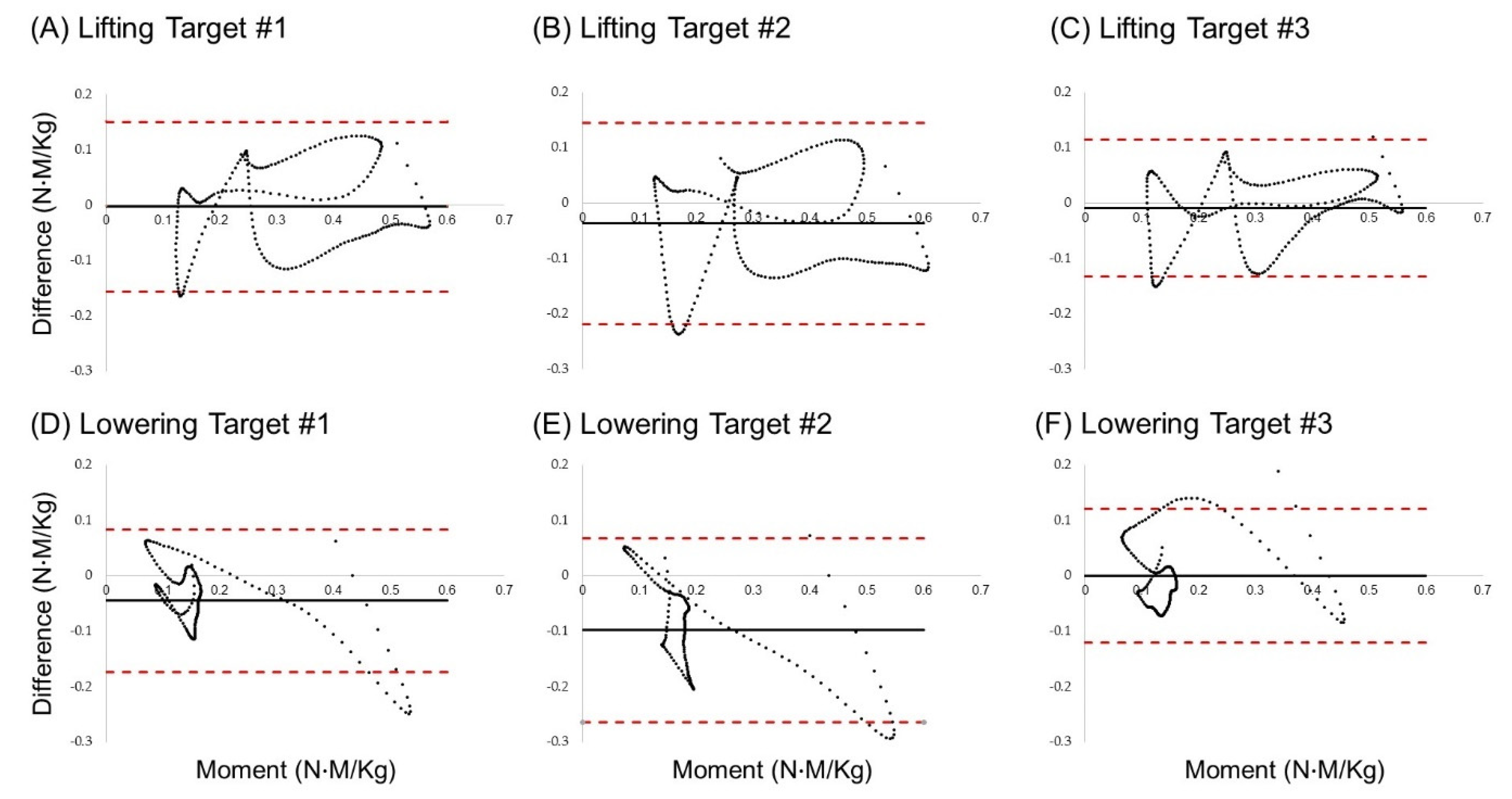
5. Result
6. Discussion
7. Conclusions
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Balagué, F.; Mannion, A.F.; Pellisé, F.; Cedraschi, C. Non-specific low back pain. Lancet 2012, 379, 482–491. [Google Scholar] [CrossRef] [PubMed]
- Radwin, R.G.; Marras, W.S.; Lavender, S.A. Biomechanical aspects of work-related musculoskeletal disorders. Theor. Iss. Ergon. Sci. 2001, 2, 153–217. [Google Scholar] [CrossRef]
- Bernard, B.P.; Putz-Anderson, V. Musculoskeletal Disorders and Workplace Factors—A Critical Review of Epidemiologic Evidence for Work-Related Musculoskeletal Disorders of the Neck, Upper Extremity, and Low Back; The National Institute for Occupational Safety and Health (NIOSH): Washington, DC, USA, 1997.
- Kingma, I.; de Looze, M.P.; Toussaint, H.M.; Klijnsma, H.G.; Bruijnen, T.B. Validation of a full body 3-D dynamic linked segment model. Hum. Mov. Sci. 1996, 15, 833–860. [Google Scholar] [CrossRef]
- Zhang, T.; Huang, H. A lower-back robotic exoskeleton: Industrial handling augmentation used to provide spinal support. IEEE Robot. Autom. Mag. 2018, 25, 95–106. [Google Scholar] [CrossRef]
- Lazzaroni, M.; Fanti, V.; Sposito, M.; Chini, G.; Draicchio, F.; Di Natali, C.; Ortiz, J. Improving the efficacy of an active back-support exoskeleton for manual material handling using the accelerometer signal. IEEE Robot. Autom. Lett. 2022, 7, 7716–7721. [Google Scholar] [CrossRef]
- Pesenti, M.; Antonietti, A.; Gandolla, M.; Pedrocchi, A. Towards a functional performance validation standard for industrial low-back exoskeletons: State of the art review. Sensors 2021, 21, 808. [Google Scholar] [CrossRef]
- Toxiri, S.; Näf, M.B.; Lazzaroni, M.; Fernández, J.; Sposito, M.; Poliero, T.; Ortiz, J. Back-support exoskeletons for occupational use: An overview of technological advances and trends. IISE Trans. Occup. Ergon. Hum. Factors 2019, 7, 237–249. [Google Scholar] [CrossRef]
- Moya-Esteban, A.; van der Kooij, H.; Sartori, M. Robust estimation of lumbar joint forces in symmetric and asymmetric lifting tasks via large-scale electromyography-driven musculoskeletal models. J. Biomech. 2022, 144, 111307. [Google Scholar] [CrossRef]
- Plamondon, A.; Gagnon, M.; Gravel, D. Moments at the L5/S1 joint during asymmetrical lifting: Effects of different load trajectories and initial load positions. Clin. Biomech. 1995, 10, 128–136. [Google Scholar] [CrossRef]
- Tabasi, A.; Kingma, I.; de Looze, M.P.; van Dijk, W.; Koopman, A.S.; van Dieën, J.H. Selecting the appropriate input variables in a regression approach to estimate actively generated muscle moments around L5/S1 for exoskeleton control. J. Biomech. 2020, 102, 109650. [Google Scholar] [CrossRef]
- Li, Z.; Li, J.; Zhao, S.; Yuan, Y.; Kang, Y.; Chen, C.P. Adaptive neural control of a kinematically redundant exoskeleton robot using brain–machine interfaces. IEEE Trans. Neural Netw. Learn. Syst. 2018, 30, 3558–3571. [Google Scholar] [CrossRef]
- Gallagher, S.; Kotowski, S.; Davis, K.G.; Mark, C.; Compton, C.S.; Huston, R.L.; Connelly, J. External L5–S1 joint moments when lifting wire mesh screen used to prevent rock falls in underground mines. Int. J. Ind. Ergon. 2009, 39, 828–834. [Google Scholar] [CrossRef]
- Choi, A.R.; Yun, T.S.; Lee, K.S.; Min, K.K.; Hwang, H.; Lee, K.Y.; Mun, J.H. Asymmetric loading of erector spinae muscles during sagittally symmetric lifting. J. Mech. Sci. Technol. 2009, 23, 64–74. [Google Scholar] [CrossRef]
- Choi, A.; Lee, J.M.; Mun, J.H. Ground reaction forces predicted by using artificial neural network during asymmetric movements. Int. J. Precis. Eng. Manuf. 2013, 14, 475–483. [Google Scholar] [CrossRef]
- Faber, G.S.; Kingma, I.; Chang, C.C.; Dennerlein, J.T.; Van Dieen, J.H. Validation of a wearable system for 3D ambulatory L5/S1 moment assessment during manual lifting using instrumented shoes and an inertial sensor suit. J. Biomech. 2020, 102, 109671. [Google Scholar] [CrossRef] [PubMed]
- Hlucny, S.D.; Novak, D. Characterizing human box-lifting behavior using wearable inertial motion sensors. Sensors 2020, 20, 2323. [Google Scholar] [CrossRef]
- Kim, T.H.; Choi, A.; Heo, H.M.; Kim, H.; Mun, J.H. Acceleration magnitude at impact following loss of balance can be estimated using deep learning model. Sensors 2020, 20, 6126. [Google Scholar] [CrossRef] [PubMed]
- Aghazadeh, F.; Arjmand, N.; Nasrabadi, A.M. Coupled artificial neural networks to estimate 3D whole-body posture, lumbosacral moments, and spinal loads during load-handling activities. J. Biomech. 2020, 102, 109332. [Google Scholar] [CrossRef] [PubMed]
- Chae, S.; Choi, A.; Jung, H.; Kim, T.H.; Kim, K.; Mun, J.H. Machine learning model to estimate net joint moments during lifting task using wearable sensors: A preliminary study for design of exoskeleton control system. Appl. Sci. 2021, 11, 11735. [Google Scholar] [CrossRef]
- Houlsby, N.; Giurgiu, A.; Jastrzebski, S.; Morrone, B.; De Laroussilhe, Q.; Gesmundo, A.; Gelly, S. Parameter-efficient transfer learning for NLP. In Proceedings of the 36th International Conference on Machine Learning, Long Beach, CA, USA, 9–15 June 2019; pp. 2790–2799. [Google Scholar]
- Han, X.; Zhang, Z.; Ding, N.; Gu, Y.; Liu, X.; Huo, Y.; Zhu, J. Pre-trained models: Past, present and future. AI Open 2021, 2, 225–250. [Google Scholar] [CrossRef]
- Qiu, X.; Sun, T.; Xu, Y.; Shao, Y.; Dai, N.; Huang, X. Pre-trained models for natural language processing: A survey. Sci. China Technol. Sci. 2020, 63, 1872–1897. [Google Scholar] [CrossRef]
- Weiss, K.; Khoshgoftaar, T.M.; Wang, D. A survey of transfer learning. J. Big Data 2016, 3, 9. [Google Scholar] [CrossRef]
- Niu, S.; Liu, Y.; Wang, J.; Song, H. A decade survey of transfer learning (2010–2020). IEEE Trans. Artif. Intell. 2020, 1, 151–166. [Google Scholar] [CrossRef]
- Kuijer, P.P.F.M.; van Oostrom, S.H.; Duijzer, K.; Van Dieen, J.H. Maximum acceptable weight of lift reflects peak lumbosacral extension moments in a functional capacity evaluation test using free style, stoop and squat lifting. Ergonomics 2012, 55, 343–349. [Google Scholar] [CrossRef]
- Mei, Q.; Gu, Y.; Xiang, L.; Yu, P.; Gao, Z.; Shim, V.; Fernandez, J. Foot shape and plantar pressure relationships in shod and barefoot populations. Biomech. Model. Mechanobiol. 2009, 19, 1211–1224. [Google Scholar] [CrossRef]
- Mun, F.; Choi, A. Deep learning approach to estimate foot pressure distribution in walking with application for a cost-effective insole system. J. NeuroEng. Rehabil. 2022, 19, 4. [Google Scholar] [CrossRef]
- Alemi, M.M.; Geissinger, J.; Simon, A.A.; Chang, S.E.; Asbeck, A.T. A passive exoskeleton reduces peak and mean EMG during symmetric and asymmetric lifting. J. Electromyogr. Kinesiol. 2019, 47, 25–34. [Google Scholar] [CrossRef]
- Hwang, S.; Kim, Y.; Kim, Y. Lower extremity joint kinetics and lumbar curvature during squat and stoop lifting. BMC Musculoskelet. Disord. 2009, 10, 15. [Google Scholar] [CrossRef] [PubMed]
- Koopman, A.S.; Toxiri, S.; Power, V.; Kingma, I.; van Dieën, J.H.; Ortiz, J.; de Looze, M.P. The effect of control strategies for an active back-support exoskeleton on spine loading and kinematics during lifting. J. Biomech. 2019, 91, 14–22. [Google Scholar] [CrossRef] [PubMed]
- Day, O.; Khoshgoftaar, T.M. A survey on heterogeneous transfer learning. J. Big Data 2017, 4, 29. [Google Scholar] [CrossRef]
- Zhang, W.; Deng, L.; Zhang, L.; Wu, D. A survey on negative transfer. IEEE/CAA J. Autom. 2022, 10, 305–329. [Google Scholar] [CrossRef]
- Vrbančič, G.; Podgorelec, V. Transfer learning with adaptive fine-tuning. IEEE Access 2020, 8, 196197–196211. [Google Scholar] [CrossRef]
- Guo, Y.; Shi, H.; Kumar, A.; Grauman, K.; Rosing, T.; Feris, R. Spottune: Transfer learning through adaptive fine-tuning. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Long Beach, CA, USA, 15–20 June 2019; pp. 4805–4814. [Google Scholar]
- Wang, F.; Jiang, M.; Qian, C.; Yang, S.; Li, C.; Zhang, H.; Tang, X. Residual attention network for image classification. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition CVPR 2017, Honolulu, HI, USA, 21–26 June 2017; pp. 3156–3164. [Google Scholar]
- Chen, L.; Hu, D. An effective swimming stroke recognition system utilizing deep learning based on inertial measurement units. Adv. Robot. 2023, 37, 467–479. [Google Scholar] [CrossRef]
- Salman, H.; Jain, S.; Ilyas, A.; Engstrom, L.; Wong, E.; Madry, A. When does Bias Transfer in Transfer Learning? arXiv 2022, arXiv:2207.02842. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Hyperparameter | Range of Parameter | |
|---|---|---|
| 1 | Initial learning rate | [1 × 10−6, 1 × 10−2] |
| 2 | Mini batch size | [8, 16, 32, 64] |
| 3 | L2 regularization | [1 × 10−10, 1 × 10−2] |
| 4 | Gradient threshold | [1, 2, 3, 4, 5, 6] |
| Lifting | Lowering | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| 0° | 30° | 60° | 90° | 0° | 30° | 60° | 90° | ||
| Source | RMSE (N·m/kg) | 0.067 ± 0.021 | 0.053 ± 0.016 | 0.061 ± 0.025 | 0.058 ± 0.025 | 0.067 ± 0.019 | 0.061 ± 0.018 | 0.066 ± 0.021 | 0.062 ± 0.023 |
| rRMSE (%) | 9.60 ± 2.18 | 9.63 ± 2.88 | 10.57 ± 3.31 | 10.30 ± 3.29 | 9.68 ± 2.05 | 9.69 ± 2.63 | 11.74 ± 3.32 | 10.83 ± 2.97 | |
| Correlation | 0.957 ± 0.052 | 0.962 ± 0.054 | 0.943 ± 0.050 | 0.945 ± 0.051 | 0.959 ± 0.052 | 0.956 ± 0.044 | 0.923 ± 0.044 | 0.942 ± 0.051 | |
| Conventional | RMSE (N·m/kg) | 0.120 ± 0.041 | 0.129 ± 0.039 | 0.116 ± 0.032 | 0.123 ± 0.043 | 0.126 ± 0.033 | 0.121 ± 0.043 | 0.130 ± 0.039 | 0.133 ± 0.032 |
| rRMSE (%) | 17.24 ± 4.32 | 17.18 ± 3.99 | 15.86 ± 5.08 | 16.19 ± 5.34 | 17.49 ± 4.84 | 18.21 ± 5.31 | 17.61 ± 4.19 | 18.87 ± 4.42 | |
| Correlation | 0.851 ± 0.053 | 0.870 ± 0.051 | 0.896 ± 0.034 | 0.875 ± 0.049 | 0.858 ± 0.045 | 0.860 ± 0.042 | 0.871 ± 0.043 | 0.861 ± 0.033 | |
| Target #1 | RMSE (N·m/kg) | 0.122 ± 0.026 | 0.115 ± 0.029 | 0.110 ± 0.030 | 0.111 ± 0.026 | 0.118 ± 0.028 | 0.112 ± 0.024 | 0.127 ± 0.029 | 0.121 ± 0.027 |
| rRMSE (%) | 15.15 ± 3.39 | 15.79 ± 4.02 | 15.91 ± 3.78 | 15.85 ± 3.33 | 15.88 ± 3.37 | 15.73 ± 3.17 | 17.07 ± 3.28 | 16.21 ± 3.30 | |
| Correlation | 0.899 ± 0.040 | 0.904 ± 0.035 | 0.887 ± 0.038 | 0.889 ± 0.032 | 0.889 ± 0.035 | 0.885 ± 0.031 | 0.875 ± 0.029 | 0.889 ± 0.032 | |
| Target #2 | RMSE (N·m/kg) | 0.213 ± 0.068 | 0.190 ± 0.061 | 0.181 ± 0.053 | 0.172 ± 0.041 | 0.211 ± 0.061 | 0.199 ± 0.052 | 0.186 ± 0.076 | 0.183 ± 0.064 |
| rRMSE (%) | 21.63 ± 7.41 | 19.31 ± 6.43 | 20.09 ± 5.69 | 19.48 ± 4.62 | 21.50 ± 7.21 | 19.38 ± 4.68 | 20.95 ± 5.71 | 20.12 ± 6.11 | |
| Correlation | 0.788 ± 0.047 | 0.832 ± 0.034 | 0.817 ± 0.039 | 0.823 ± 0.046 | 0.773 ± 0.043 | 0.838 ± 0.035 | 0.822 ± 0.050 | 0.827 ± 0.040 | |
| Target #3 | RMSE (N·m/kg) | 0.084 ± 0.025 | 0.077 ± 0.021 | 0.073 ± 0.024 | 0.071 ± 0.019 | 0.083 ± 0.021 | 0.087 ± 0.018 | 0.080 ± 0.017 | 0.076 ± 0.021 |
| rRMSE (%) | 12.16 ± 2.48 | 12.13 ± 2.27 | 11.94 ± 2.42 | 11.99 ± 2.46 | 12.22 ± 2.28 | 11.95 ± 2.64 | 12.86 ± 2.60 | 12.28 ± 2.26 | |
| Correlation | 0.947 ± 0.015 | 0.917 ± 0.029 | 0.927 ± 0.021 | 0.928 ± 0.030 | 0.939 ± 0.032 | 0.928 ± 0.025 | 0.915 ± 0.035 | 0.916 ± 0.032 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chae, S.; Choi, A.; Kang, J.; Mun, J.H. Can Pressure Data from Wearable Insole Devices Be Utilized to Estimate Low Back Moments for Exoskeleton Control System? Actuators 2024, 13, 92. https://doi.org/10.3390/act13030092
Chae S, Choi A, Kang J, Mun JH. Can Pressure Data from Wearable Insole Devices Be Utilized to Estimate Low Back Moments for Exoskeleton Control System? Actuators. 2024; 13(3):92. https://doi.org/10.3390/act13030092
Chicago/Turabian StyleChae, Seungheon, Ahnryul Choi, Jeehae Kang, and Joung Hwan Mun. 2024. "Can Pressure Data from Wearable Insole Devices Be Utilized to Estimate Low Back Moments for Exoskeleton Control System?" Actuators 13, no. 3: 92. https://doi.org/10.3390/act13030092
APA StyleChae, S., Choi, A., Kang, J., & Mun, J. H. (2024). Can Pressure Data from Wearable Insole Devices Be Utilized to Estimate Low Back Moments for Exoskeleton Control System? Actuators, 13(3), 92. https://doi.org/10.3390/act13030092