Active Disturbance-Rejection Controller (ADRC)-Based Torque Control for a Pneumatic Rotary Actuator with Positional Interference


Abstract
1. Introduction
- (1)
- An active disturbance-rejection torque controller integrated with a Kalman filter is presented.
- (2)
- The control accuracy of the pneumatic servo system can be greatly enhanced by the NLESO, which estimates and compensates for external disturbances and nonlinearity.
- (3)
- The Kalman filter is designed to perform real-time filtering, effectively addressing sensor-generated noise and reducing system oscillations; thus, the control precise of the system is advanced.
2. Materials and Methods
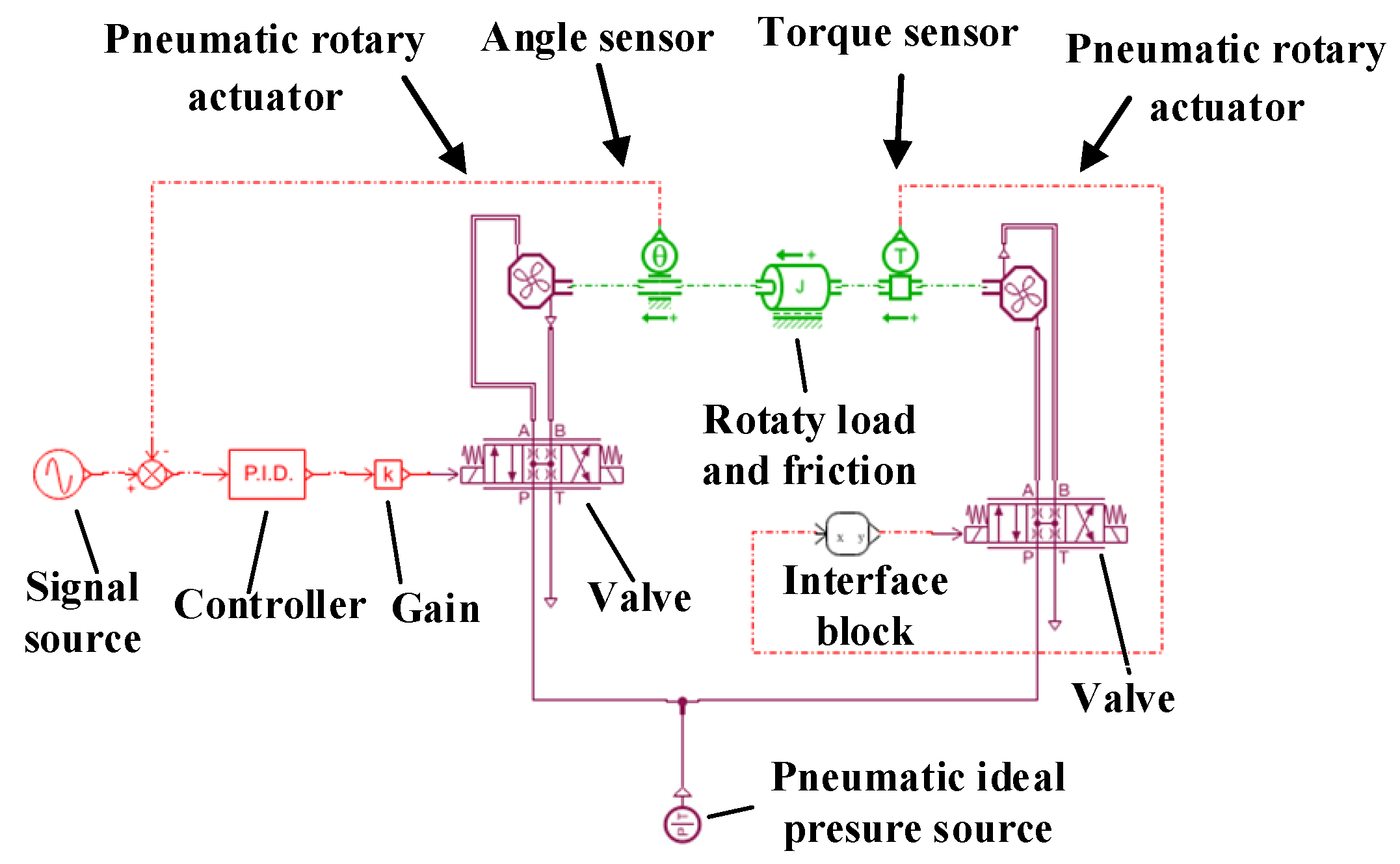
2.1. System Structure
2.2. Dynamic Model
- (1)
- The gas in the system follows the ideal gas equation of state.
- (2)
- The flow of gas is assumed to be an isentropic process.
- (3)
- There is no effect of piping on air-pressure transfer.
- (4)
- The gas temperature remains constant during the flow.
- (5)
- The actuator and the outside world, as well as between the two chambers, have no leakage.
2.3. Design of an Active Disturbance-Rejection Controller Integrated with a Kalman Filter
2.3.1. Kalman Filter
2.3.2. Nonlinear Tracking Differentiator
2.3.3. Nonlinear Extended-State Observer
2.3.4. Nonlinear Error-State Feedback Controller
- (1)
- If then
- (2)
- If then
3. Results
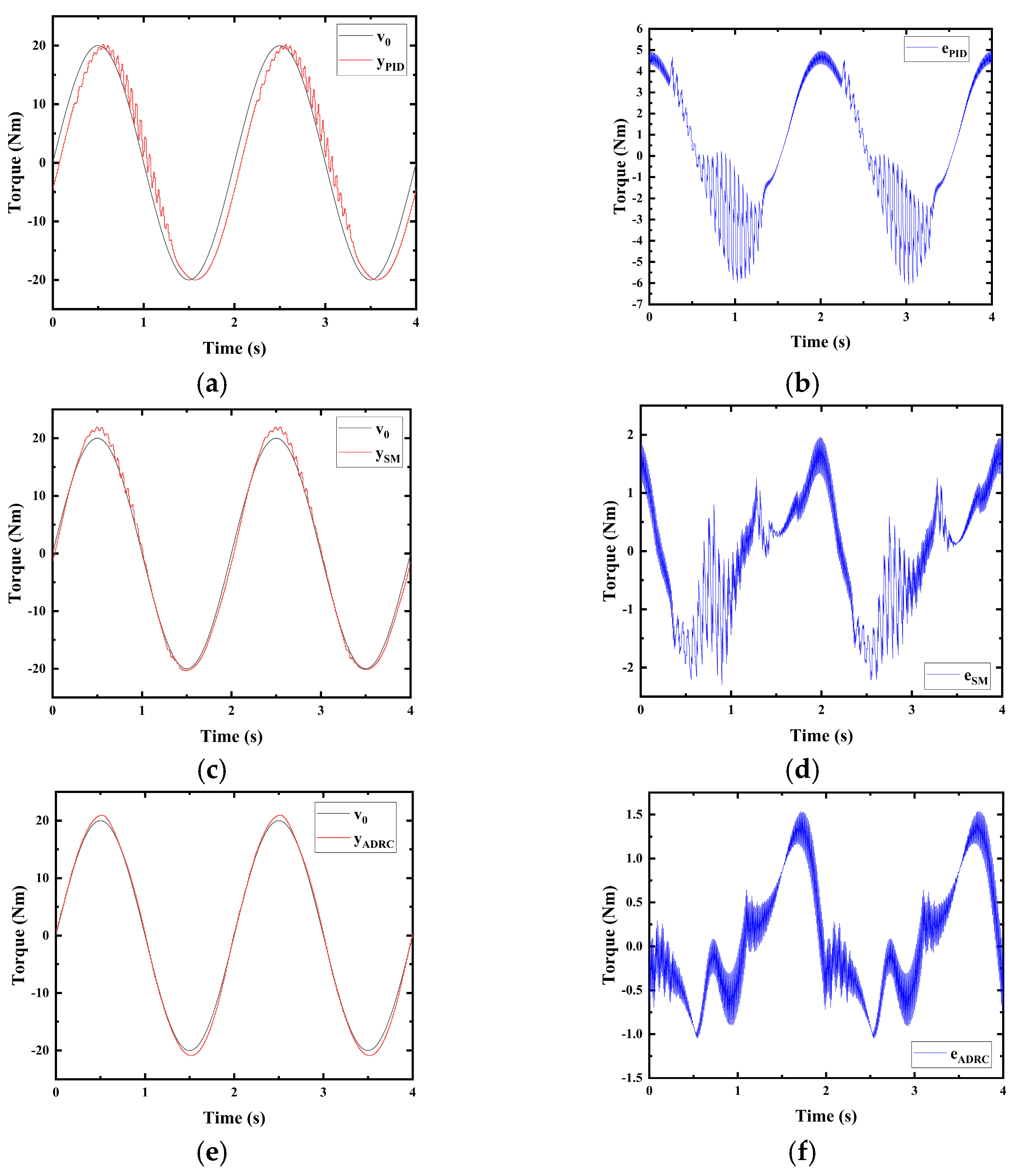
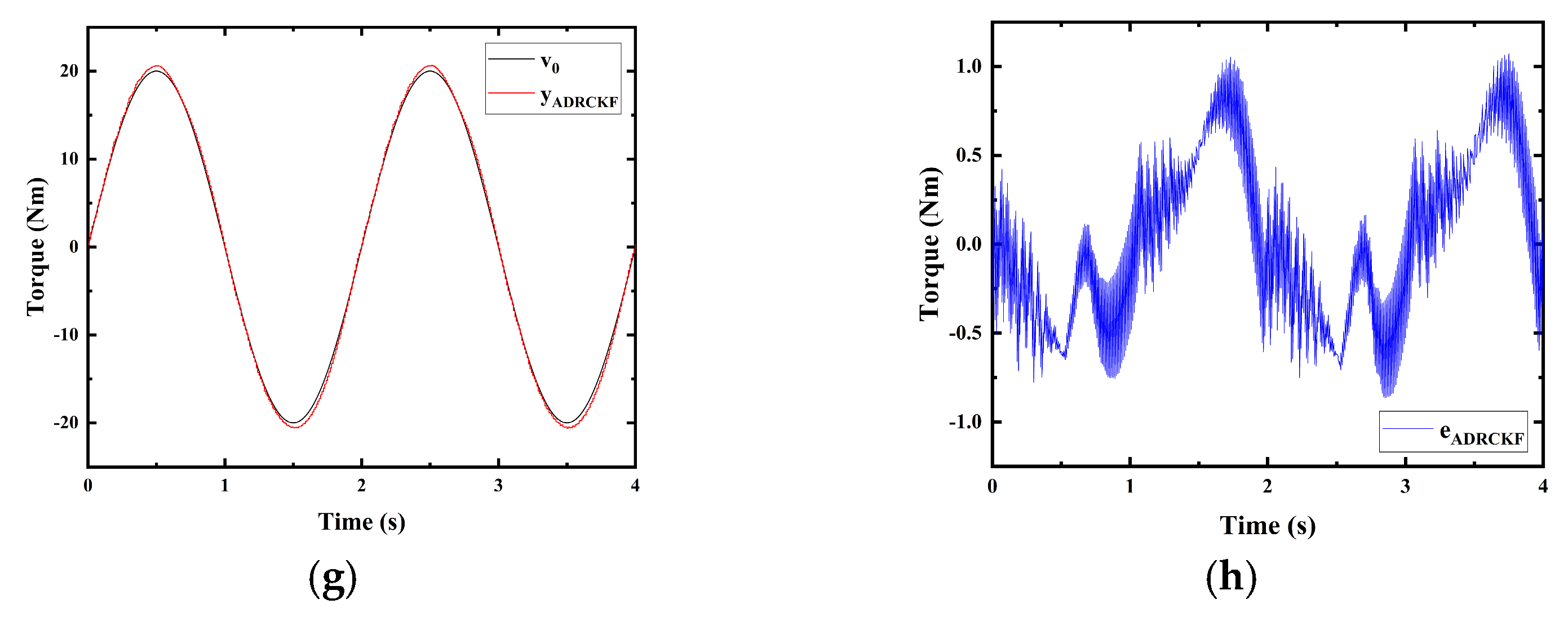
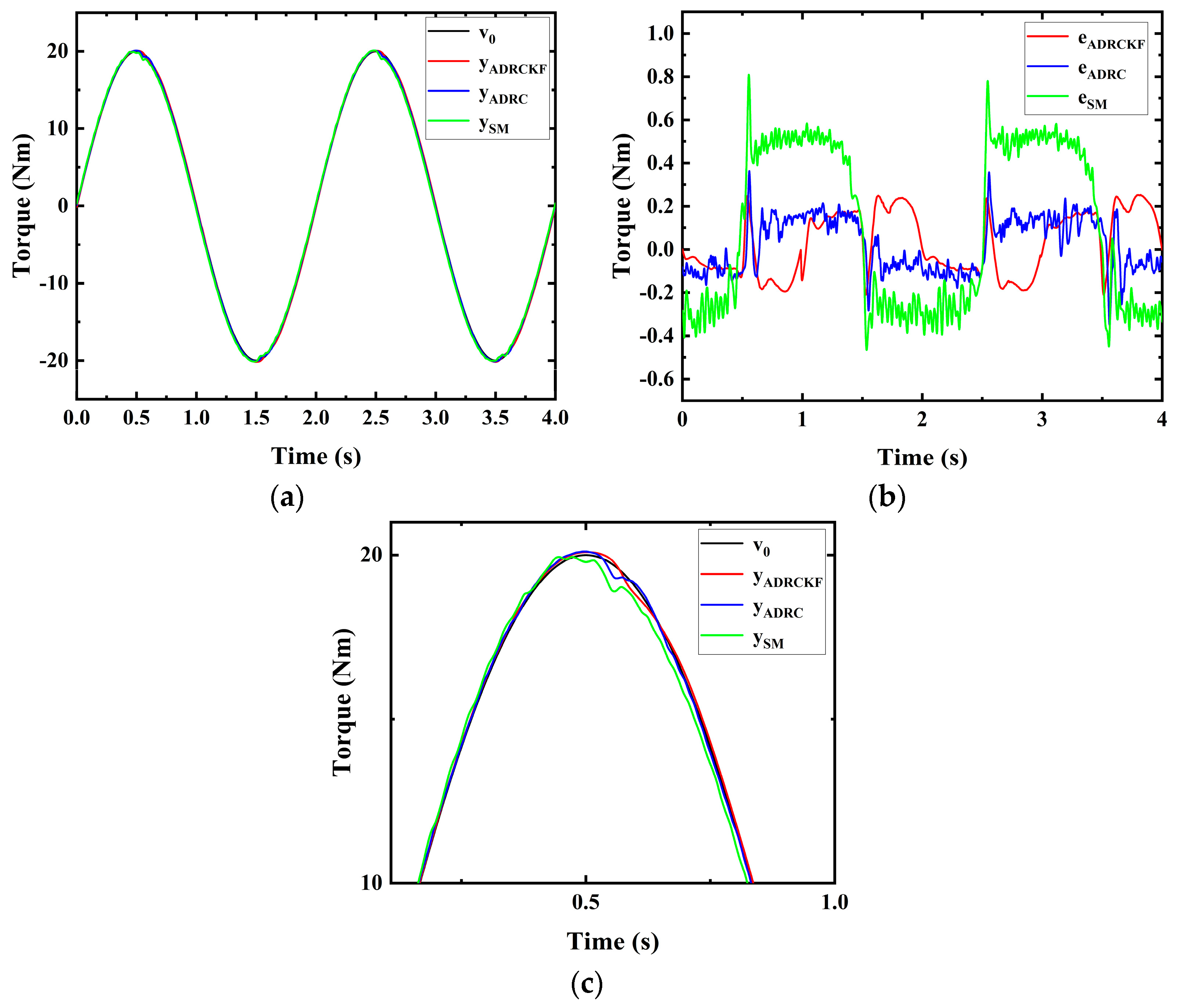
3.1. Simulation Result
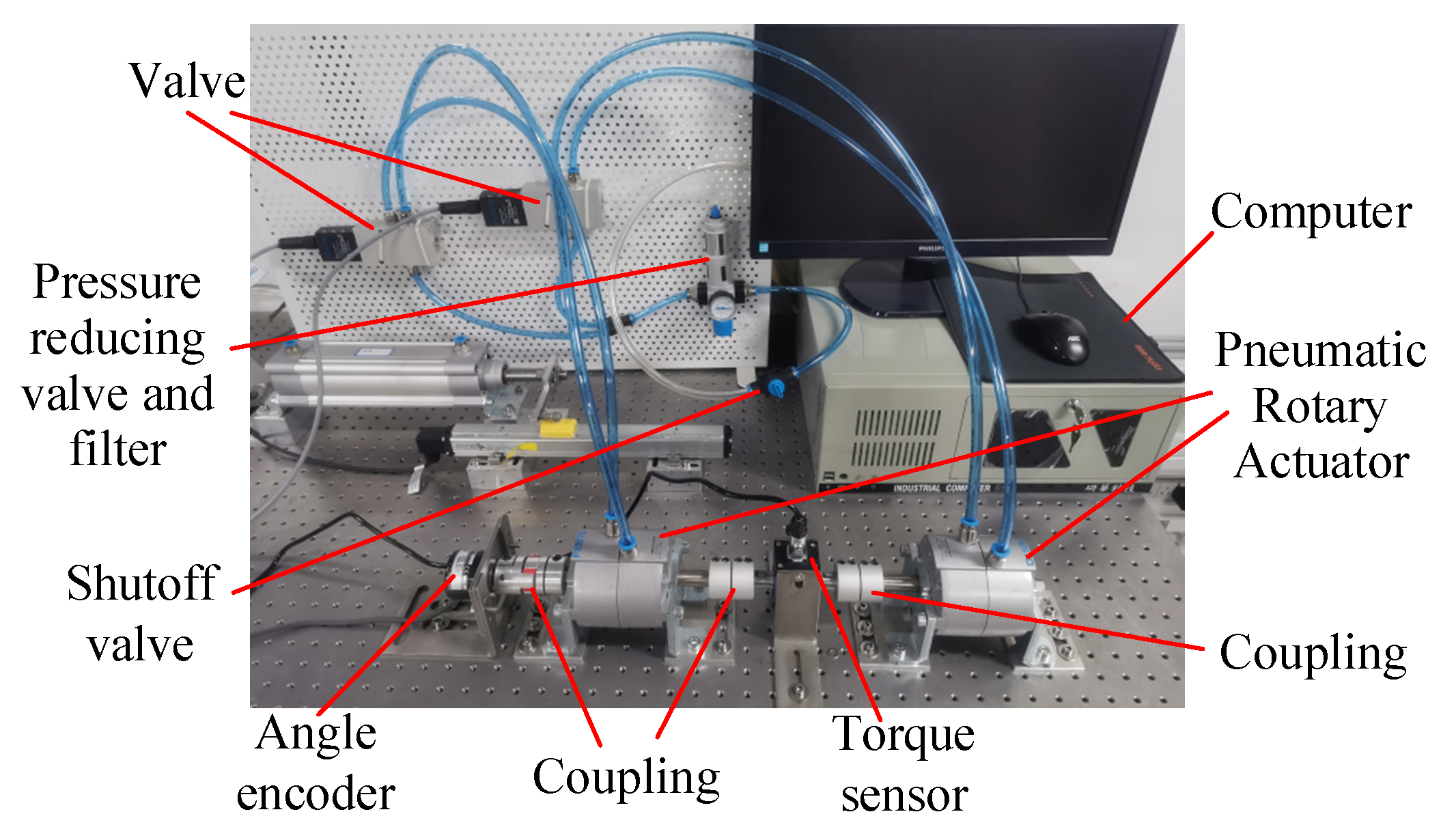
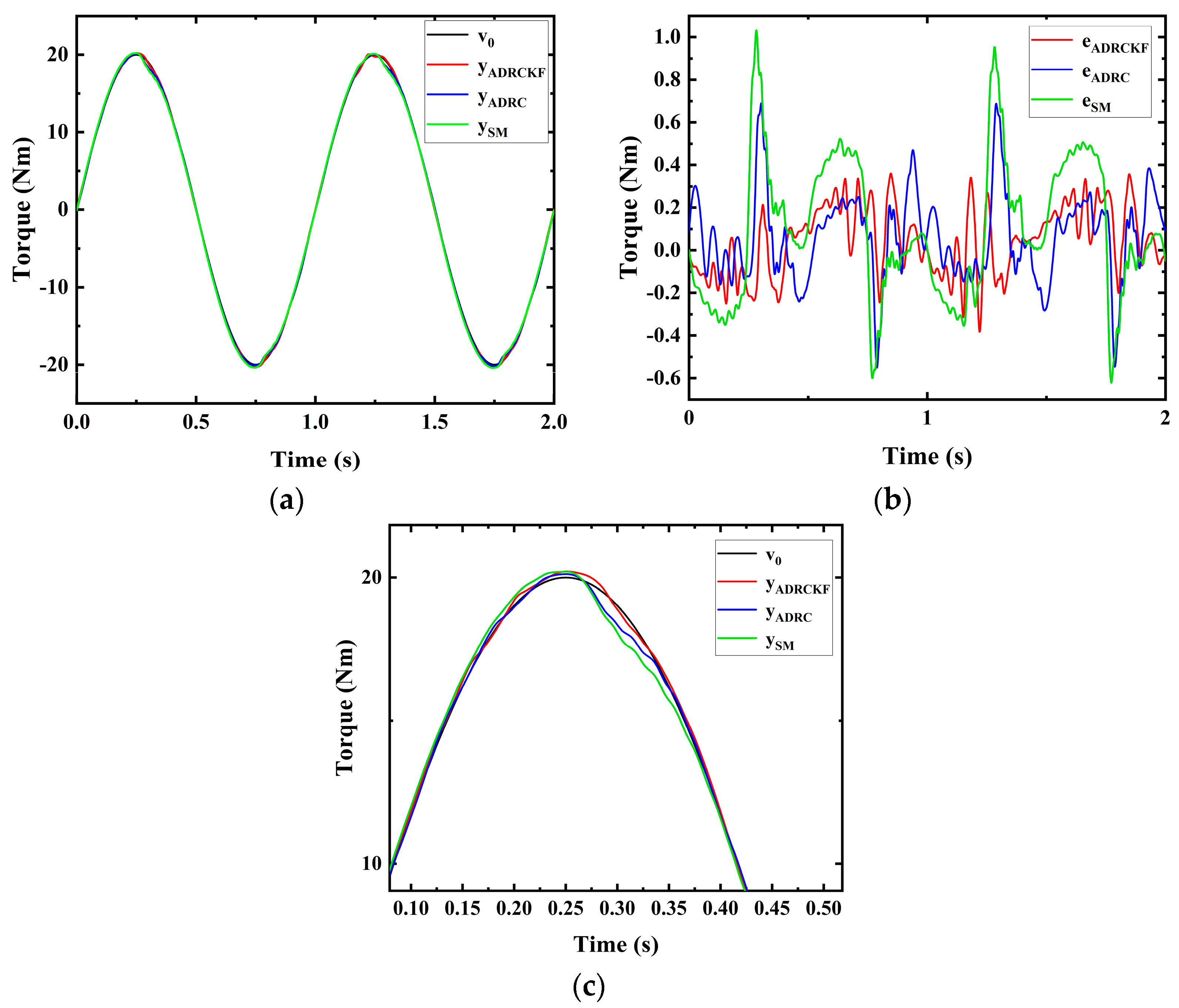
3.2. Experimental Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Schluter, M.; Perondi, E. Mathematical Modeling with Friction of a SCARA Robot Driven by Pneumatic Semi-rotary Actuators. IEEE Lat. Am. Trans. 2020, 18, 1066–1076. [Google Scholar] [CrossRef]
- Khin, M.; Low, H. Shape Programming Using Triangular and Rectangular Soft Robot Primitives. Micromachines 2019, 10, 236. [Google Scholar] [CrossRef]
- Fan, C.; Hong, G.S.; Zhao, J.; Zhang, L.; Zhao, J.; Sun, L.N. The integral sliding mode control of a pneumatic force servo for the polishing process. Precis. Eng. 2019, 55, 154–170. [Google Scholar] [CrossRef]
- Saravanakumar, D.; Mohan, B.; Muthuramalingam, T. A review on recent research trends in servo pneumatic positioning systems. Precis. Eng. 2017, 49, 481–492. [Google Scholar] [CrossRef]
- Saravanakumar, D.; Mohan, B.; Muthuramalingam, T.; Sakthivel, G. Performance evaluation of interconnected pneumatic cylinders positioning system. Sens. Actuators A—Phys. 2018, 274, 155–164. [Google Scholar]
- Aziz, M.A.; Benini, E.; Elsayed, M.E.A.; Khalifa, M.A.; Gaheen, O.A. Speed and torque control of pneumatic motors using controlled pulsating flow. Int. J. Adv. Manuf. Technol. 2023, 127, 635–648. [Google Scholar] [CrossRef]
- Wei, Q.; Jiao, Z.; Wang, J. Control of Pneumatic Position Servo with LuGre Model-based Friction Compensation. J. Mech. Eng. 2018, 54, 131–138. [Google Scholar] [CrossRef]
- Wei, Q.; Jiao, Z.; Wu, S. Nonlinear Compound Control of Pneumatic Servo Loading System. J. Mech. Eng. 2017, 53, 217–224. [Google Scholar] [CrossRef]
- Ruihua, L.; Guoxiang, M.; Zhengjin, F.; Yijie, L.; Weixiang, S. A Sliding Mode Variable Structure Control Approach for a Pneumatic Force Servo System. In Proceedings of the 2006 6th World Congress on Intelligent Control and Automation, Dalian, China, 21–23 June 2006; Volume 2, pp. 8173–8177. [Google Scholar]
- Zhao, L.; Zhang, B.; Yang, H.J.; Wang, Y.J. Observer-Based Integral Sliding Mode Tracking Control for a Pneumatic Cylinder with Varying Loads. IEEE Trans. Syst. Man Cybern. Syst. 2020, 50, 2650–2658. [Google Scholar] [CrossRef]
- Wang, T.; Chen, X.X.; Qin, W. A novel adaptive control for reaching movements of an anthropomorphic arm driven by pneumatic artificial muscles. Appl. Soft Comput. 2019, 83, 105623. [Google Scholar] [CrossRef]
- Taheri, B.; Case, D.; Richer, E. Force and Stiffness Backstepping-Sliding Mode Controller for Pneumatic Cylinders. IEEE/ASME Trans. Mechatron. 2014, 19, 1799–1809. [Google Scholar] [CrossRef]
- Meng, D.Y.; Tao, G.L.; Ban, W.; Qian, P.F. Adaptive robust output force tracking control of pneumatic cylinder while maximizing/minimizing its stiffness. J. Cent. South Univ. 2013, 20, 1510–1518. [Google Scholar] [CrossRef]
- Bobrow, J.E.; Jabbari, F. Adaptive pneumatic force actuation and position control. J. Dyn. Syst. Meas. Control 1991, 113, 267–272. [Google Scholar] [CrossRef]
- Fan, C.; Xue, C.; Zhang, L.; Wang, K.; Wang, Q.; Gao, Y.; Lu, L. Design and control of the belt-polishing tool system for the blisk finishing process. Mech. Sci. 2021, 12, 237–248. [Google Scholar] [CrossRef]
- Precup, R.-E.; Preitl, S.; Rudas, I.J.; Tomescu, M.L.; Tar, J.K. Design and experiments for a class of fuzzy controlled servo systems. IEEE/ASME Trans. Mechatron. 2008, 13, 22–35. [Google Scholar] [CrossRef]
- Roman, R.C.; Precup, R.E.; Hedrea, E.L.; Preitl, S.; Zamfirache, I.A.; Bojan-Dragos, C.A.; Petriu, E.M. Iterative feedback tuning algorithm for tower crane systems. Procedia Comput. Sci. 2022, 199, 157–165. [Google Scholar] [CrossRef]
- Gao, S.L.; Zhao, D.Y.; Yan, X.G.; Spurgeon, S.K. Model-Free Adaptive State Feedback Control for a Class of Nonlinear Systems. In IEEE Transactions on Automation Science and Engineering; IEEE: Piscataway, NJ, USA, 2023. [Google Scholar]
- Liu, B.; Jin, Y.; Zhu, C.; Chen, C. Pitching axis control for a satellite camera based on a novel active disturbance rejection controller. Adv. Mech. Eng. 2017, 9, 1687814016689039. [Google Scholar] [CrossRef]
- Tan, L.; Liang, S.; Su, H.; Qin, Z.; Li, L.; Huo, J. Research on Amphibious Multi-Rotor UAV Out-of-Water Control Based on ADRC. Appl. Sci. 2023, 13, 4900. [Google Scholar] [CrossRef]
- Huang, Y.; Xue, W. Active disturbance rejection control: Methodology and theoretical analysis. ISA Trans. 2014, 53, 963–976. [Google Scholar] [CrossRef]
- Han, J. From PID to active disturbance rejection control. IEEE Trans. Ind. Electron. 2009, 56, 900–906. [Google Scholar] [CrossRef]
- Li, J.; Qi, X.; Wan, H.; Xia, Y. Active disturbance rejection control:theoretical results summary and future researches. Control Theory Appl. 2017, 34, 281–295. [Google Scholar]
- Sun, M.; Jiao, G.; Yang, R.; Chen, Z. Application and analysis of ADRC in guidance and control in flight vehicle—Some explorations in various time-scale paradigms. In Proceedings of the 29th Chinese Control Conference, Beijing, China, 20 September 2010; pp. 6167–6172. [Google Scholar]
- Stojanovic, V.; He, S.P.; Zhang, B.Y. State and parameter joint estimation of linear stochastic systems in presence of faults and non-Gaussiannoises. Int. J. Robust Nonlinear Control 2020, 30, 6683–6700. [Google Scholar] [CrossRef]
- Huang, Y. A new synthesis method for uncertain systems the self-stable region approach. Int. J. Syst. Sci. 1999, 30, 33–38. [Google Scholar] [CrossRef]
- Huang, Y.; Han, J. Analysis and design for the second order nonlinear continuous extended states observer. Chin. Sci. Bull. 2000, 45, 1938–1944. [Google Scholar] [CrossRef]
- Huang, Y.; Wan, H.; Song, J. Analysis and design for third order nonlinear continuous extended states observer. In Proceeding of 19th Chinese Control Congress, Hong Kong, China, December 2000; pp. 677–681. [Google Scholar]
- Zhao, L.; Sun, J.; Yang, H.; Wang, T. Position control of a rodless cylinder in pneumatic servo with actuator saturation. ISA Trans. 2019, 90, 235–243. [Google Scholar] [CrossRef] [PubMed]
- Zhao, L.; Xia, Y.; Yang, Y.; Liu, Z. Multicontroller Positioning Strategy for a Pneumatic Servo System via Pressure Feedback. IEEE Trans. Ind. Electron. 2017, 64, 4800–4809. [Google Scholar] [CrossRef]
- Yang, H.J.; Sun, J.H.; Xia, Y.Q.; Zhao, L. Position Control for Magnetic Rodless Cylinders with Strong Static Friction. IEEE Trans. Ind. Electron. 2018, 65, 5806–5815. [Google Scholar] [CrossRef]
- Precup, R.-E.; Roman, R.-C.; Safaei, A. Data-Driven Model-Free Controllers; CRC Press: Boca Raton, FL, USA, 2021. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter Name | Parameter Value |
|---|---|
| Valve frequency | 80 Hz |
| Valve working pressure | 0–1 MPa |
| Valve flow rate | 1400 L/min |
| Valve control voltage () | 0–10 V |
| Valve nominal diameter | 8 mm |
| Valve dead-zone voltage | 4.9–5.1 V |
| Flow coefficient () | 0.142 |
| Adiabatic index of air () | 1.4 |
| Effective cross-sectional area of the orifice () | 0.00502 m2 |
| Angular displacement () | 0–180 degrees |
| Working pressure () | 0.2–0.8 MPa |
| Ideal gas constant () | 287 |
| Internal volume () | 0.00275 m3 |
| Control Strategy | Maximum Error |
|---|---|
| PID | 6 Nm |
| SM | 2.3 Nm |
| ADRC | 1.6 Nm |
| ADRCFK | 1.1 Nm |
| Control Strategy | Maximum Error |
|---|---|
| PID | 8 Nm |
| SM | 0.8 Nm |
| ADRC | 0.38 Nm |
| ADRCFK | 0.25 Nm |
| Control Strategy | Maximum Error |
|---|---|
| SM | 1.0 Nm |
| ADRC | 0.7 Nm |
| ADRCFK | 0.4 Nm |
| Control Strategy | Integral Absolute Error |
|---|---|
| PID | 14,794.439 Nm |
| SM | 1449.426 Nm |
| ADRC | 534.191 Nm |
| ADRCFK | 448.347 Nm |
| Control Strategy | Integral Absolute Error |
|---|---|
| SM | 544.884 Nm |
| ADRC | 337.312 Nm |
| ADRCFK | 286.561 Nm |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wei, Q.; Wu, Z.; Zhou, Y.; Ke, D.; Zhang, D. Active Disturbance-Rejection Controller (ADRC)-Based Torque Control for a Pneumatic Rotary Actuator with Positional Interference. Actuators 2024, 13, 66. https://doi.org/10.3390/act13020066
Wei Q, Wu Z, Zhou Y, Ke D, Zhang D. Active Disturbance-Rejection Controller (ADRC)-Based Torque Control for a Pneumatic Rotary Actuator with Positional Interference. Actuators. 2024; 13(2):66. https://doi.org/10.3390/act13020066
Chicago/Turabian StyleWei, Qiong, Zilong Wu, Yue Zhou, Ding Ke, and Daode Zhang. 2024. "Active Disturbance-Rejection Controller (ADRC)-Based Torque Control for a Pneumatic Rotary Actuator with Positional Interference" Actuators 13, no. 2: 66. https://doi.org/10.3390/act13020066
APA StyleWei, Q., Wu, Z., Zhou, Y., Ke, D., & Zhang, D. (2024). Active Disturbance-Rejection Controller (ADRC)-Based Torque Control for a Pneumatic Rotary Actuator with Positional Interference. Actuators, 13(2), 66. https://doi.org/10.3390/act13020066