
Optimizing Exoskeleton Assistance: Muscle Synergy-Based Actuation for Personalized Hip Exoskeleton Control †


 and
and
Abstract
1. Introduction
2. Methods
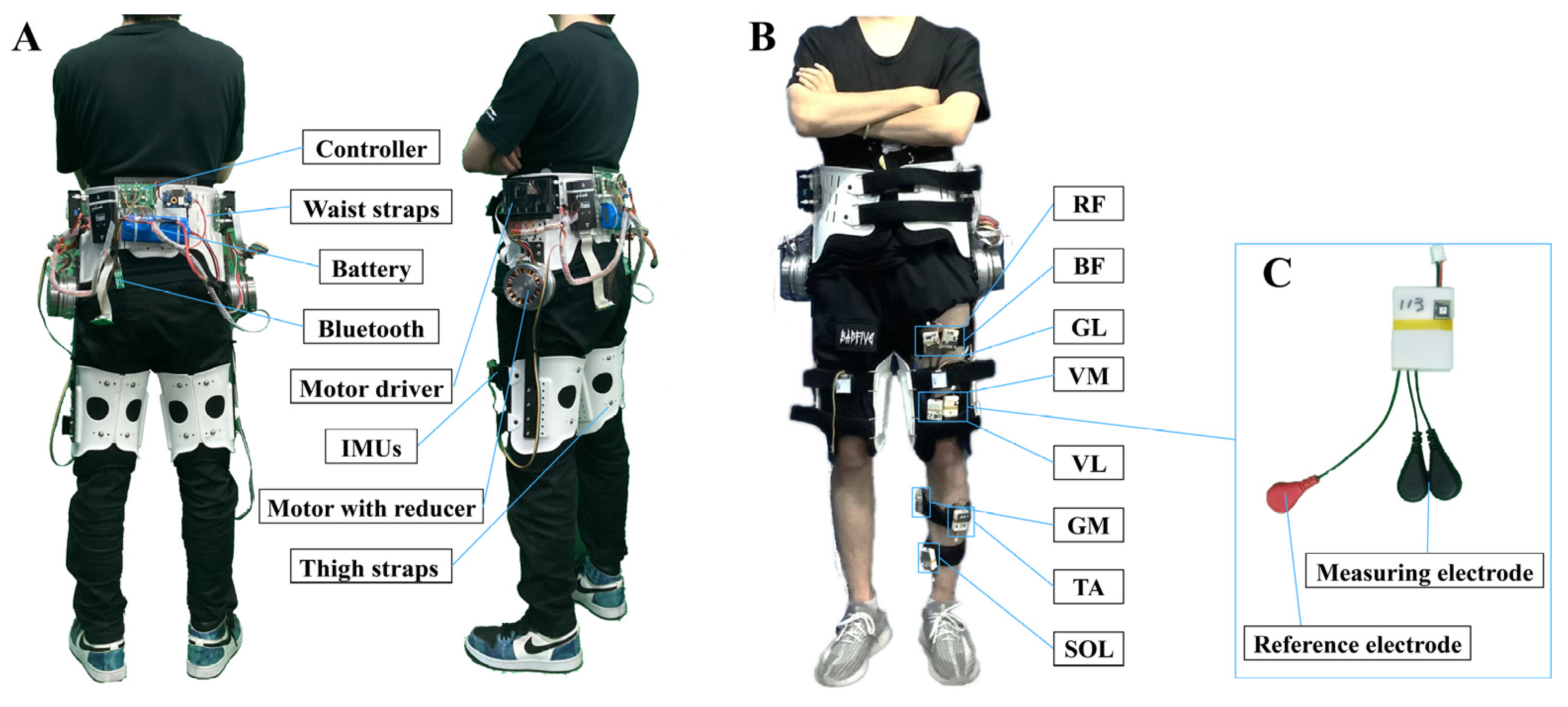
2.1. System Overview
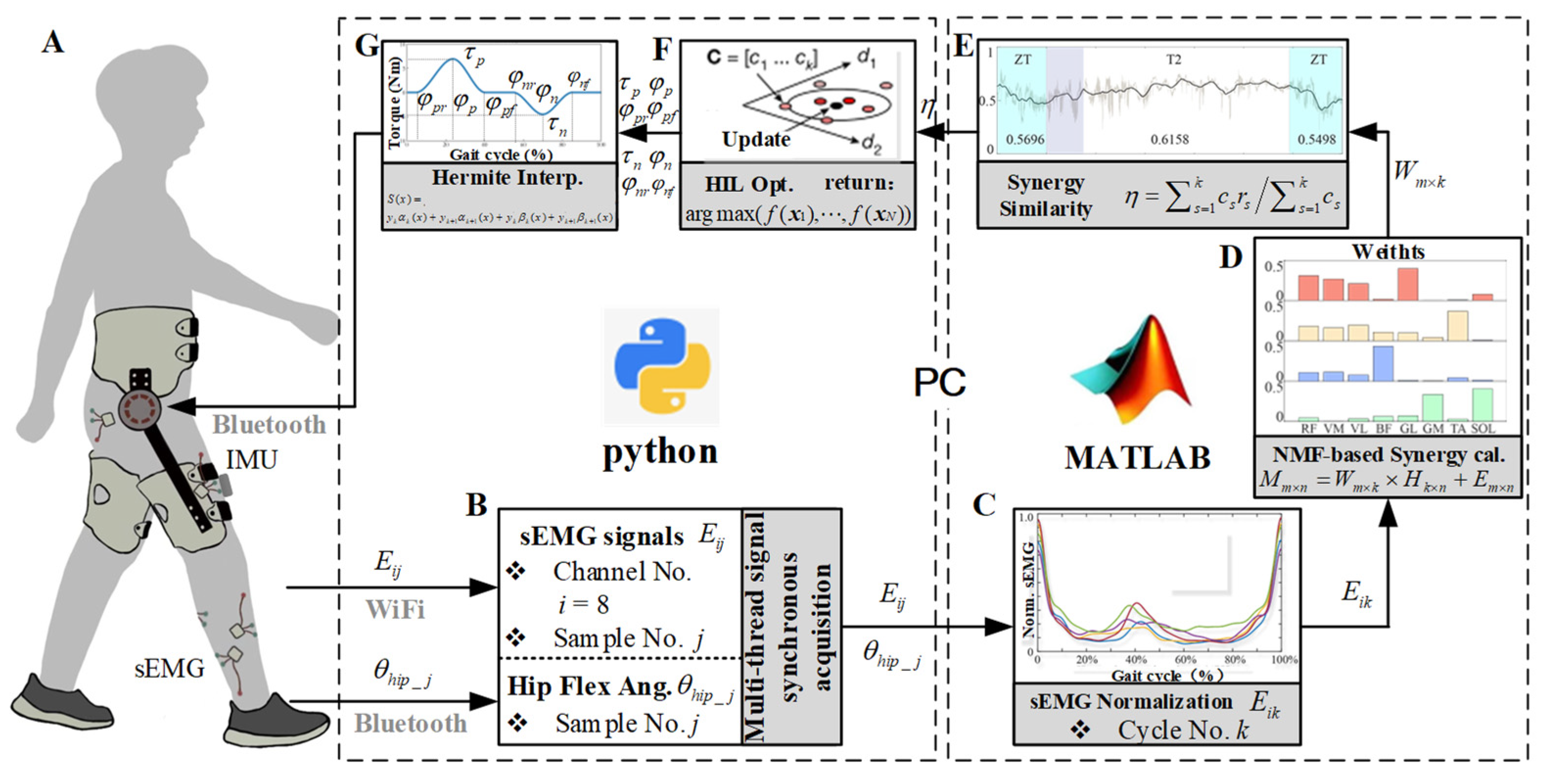
2.2. Human-in-the-Loop Optimization Platform
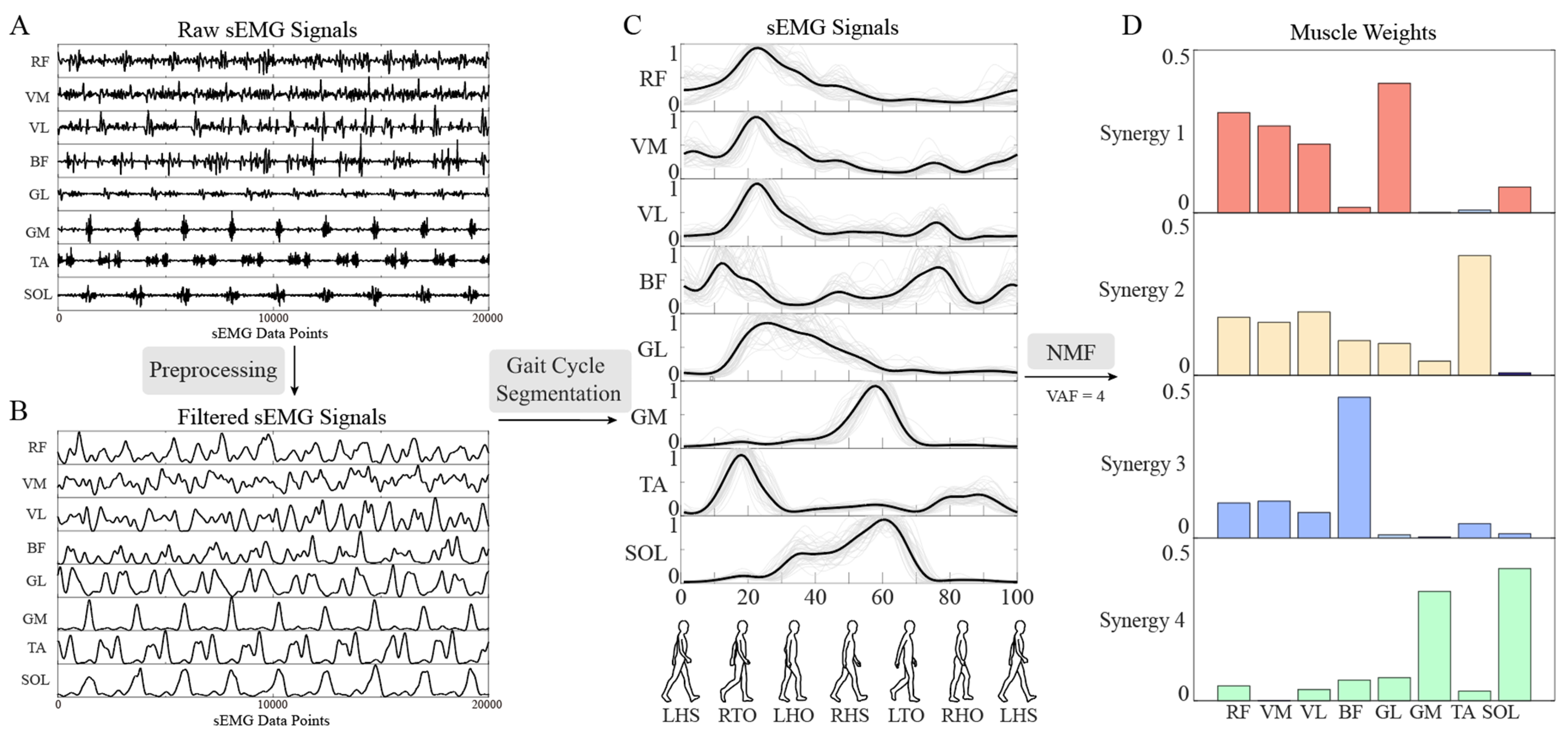
2.3. Evaluation Index Based on Muscle Synergy
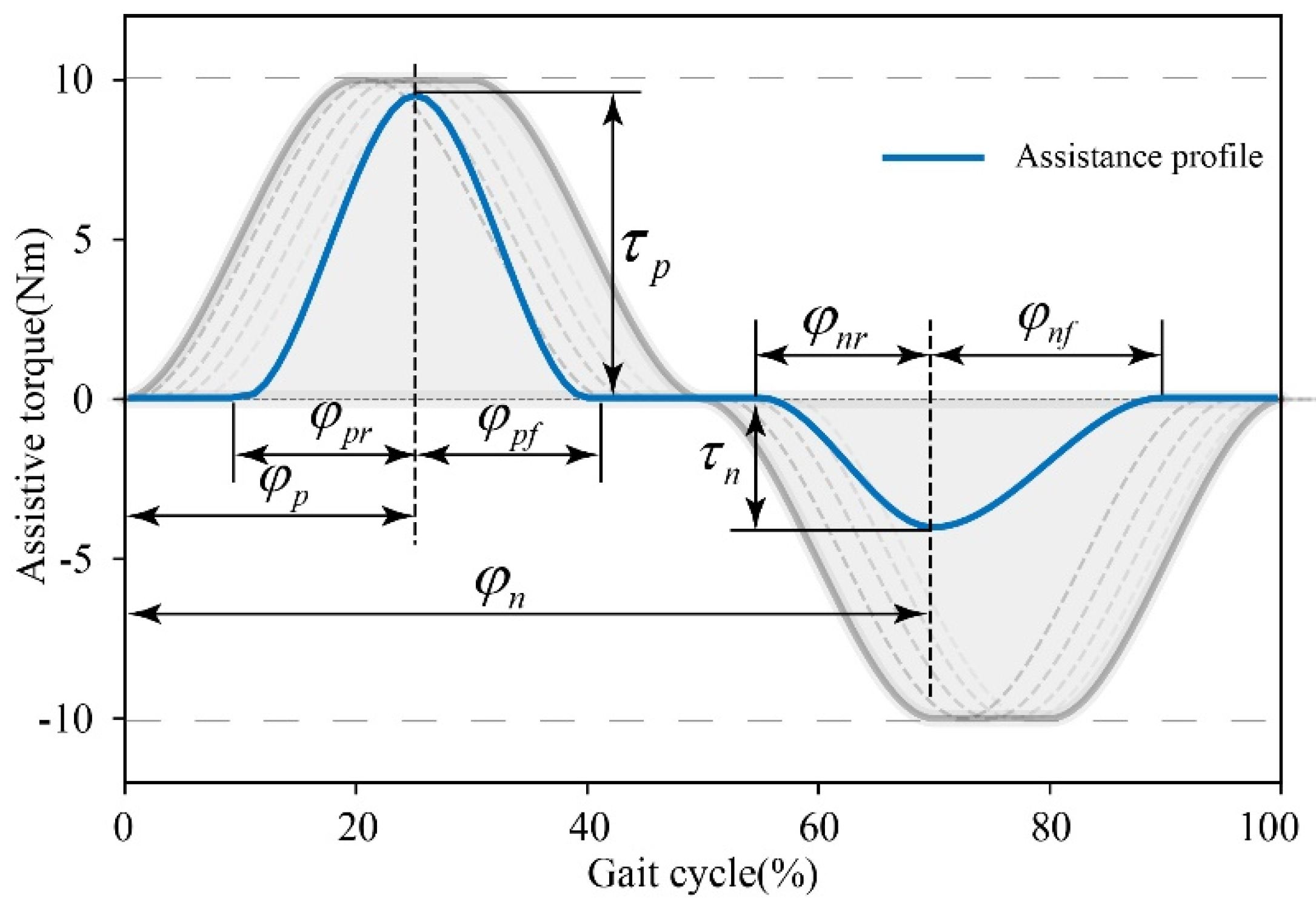
2.4. Assistive Torque Profile Generation
2.5. Iterative Process for Optimizing Assistive Torque
2.6. Testing Protocol
3. Results
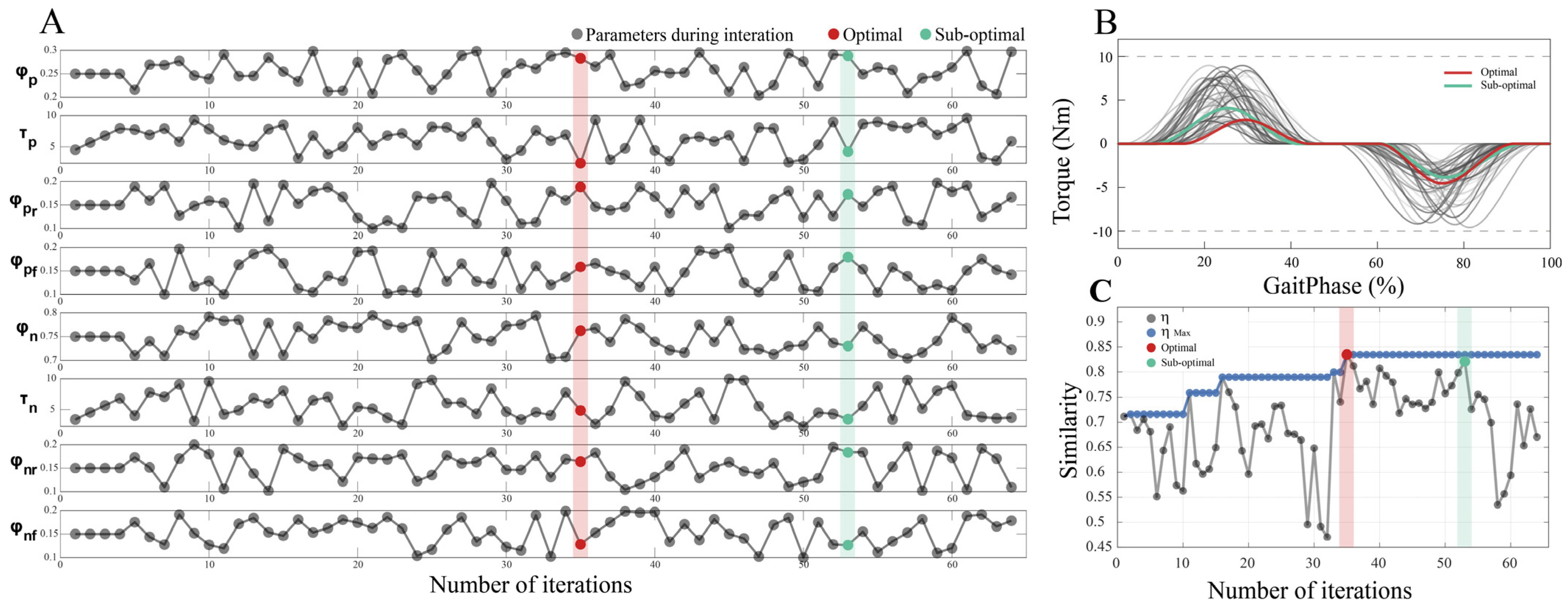
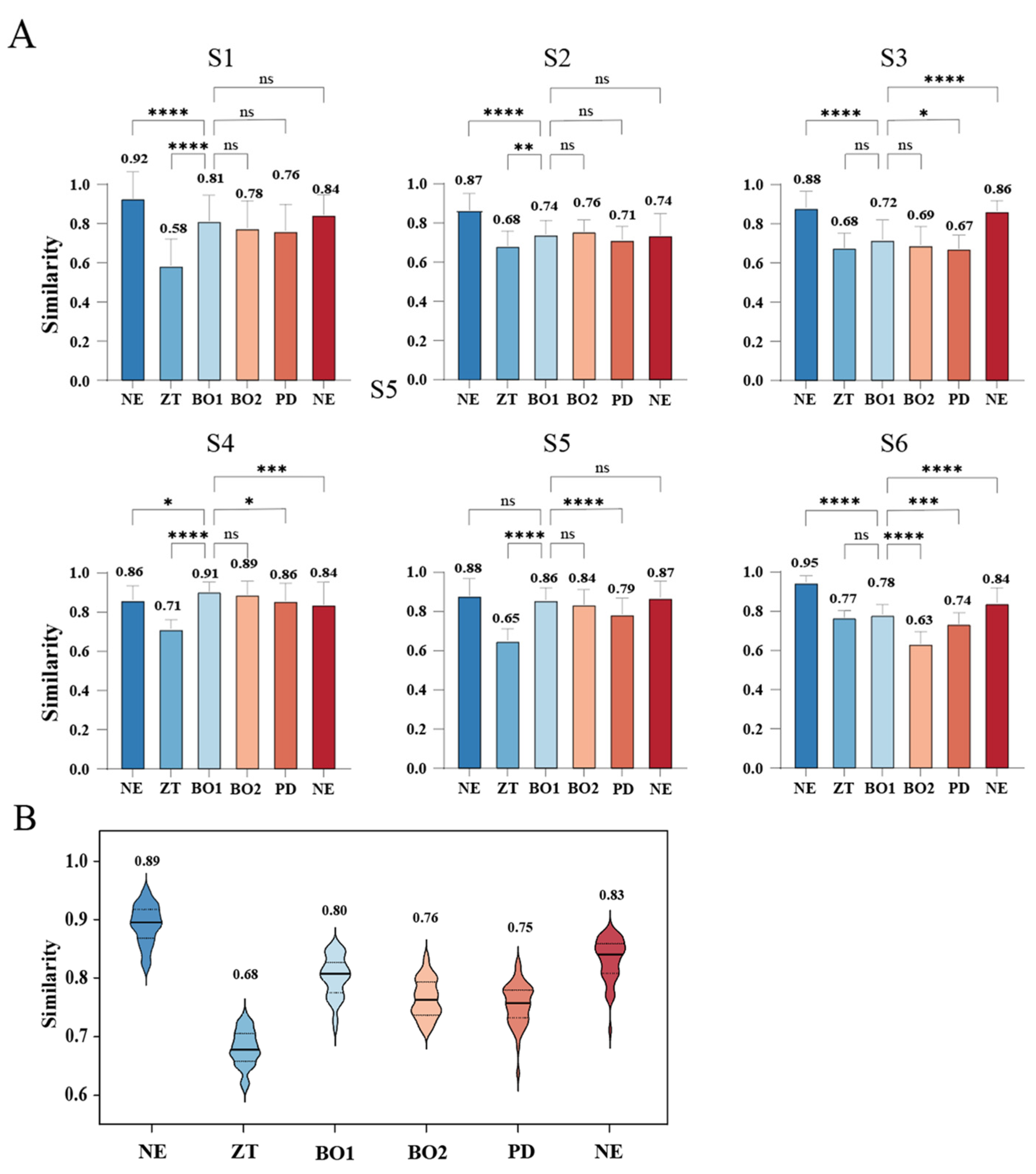
3.1. Human-in-the-Loop Optimization Experiment
3.2. Optimized Muscle Synergy
4. Discussion
4.1. Strategy for Torque Generation
4.2. Evaluation Index Based on Muscle Synergy
4.3. The Experiments and Evaluation of Human-in-the-Loop Optimization
4.4. Study Limitations
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Subjects | ||||||||
|---|---|---|---|---|---|---|---|---|
| S1 | 0.25 | 4.54 Nm | 0.17 | 0.14 | 0.73 | 3.42 Nm | 0.10 | 0.14 |
| S2 | 0.28 | 2.38 Nm | 0.19 | 0.16 | 0.76 | 4.85 Nm | 0.16 | 0.13 |
| S3 | 0.24 | 7.85 Nm | 0.16 | 0.13 | 0.79 | 9.58 Nm | 0.18 | 0.13 |
| S4 | 0.30 | 3.67 Nm | 0.10 | 0.18 | 0.80 | 2.40 Nm | 0.20 | 0.10 |
| S5 | 0.25 | 7.95 Nm | 0.15 | 0.15 | 0.75 | 6.81 Nm | 0.15 | 0.15 |
| S6 | 0.25 | 6.28 Nm | 0.18 | 0.15 | 0.75 | 5.98 Nm | 0.19 | 0.17 |
| Subjects | ||||||||
|---|---|---|---|---|---|---|---|---|
| S1 | 0.25 | 4.54 Nm | 0.15 | 0.15 | 0.75 | 3.41 Nm | 0.15 | 0.15 |
| S2 | 0.29 | 4.25 Nm | 0.17 | 0.18 | 0.73 | 3.46 Nm | 0.18 | 0.13 |
| S3 | 0.25 | 5.13 Nm | 0.20 | 0.19 | 0.71 | 6.83 Nm | 0.14 | 0.18 |
| S4 | 0.25 | 3.19 Nm | 0.14 | 0.13 | 0.75 | 3.37 Nm | 0.16 | 0.17 |
| S5 | 0.28 | 9.27 Nm | 0.12 | 0.19 | 0.78 | 6.64 Nm | 0.18 | 0.10 |
| S6 | 0.26 | 2.79 Nm | 0.13 | 0.13 | 0.72 | 9.75 Nm | 0.14 | 0.14 |
References
- Wei, Q.; Li, Z.; Zhao, K.; Kang, Y.; Su, C.-Y. Synergy-Based Control of Assistive Lower-Limb Exoskeletons by Skill Transfer. IEEE/ASME Trans. Mechatron. 2020, 25, 705–715. [Google Scholar] [CrossRef]
- Chen, Z.; Guo, Q.; Li, T.; Yan, Y.; Jiang, D. Gait Prediction and Variable Admittance Control for Lower Limb Exoskeleton with Measurement Delay and Extended-State-Observer. IEEE Trans. Neural Netw. Learn. Syst. 2023, 34, 8693–8706. [Google Scholar] [CrossRef]
- Jayaraman, C.; Embry, K.R.; Mummidisetty, C.K.; Moon, Y.; Giffhorn, M.; Prokup, S.; Lim, B.; Lee, J.; Lee, Y.; Lee, M.; et al. Modular Hip Exoskeleton Improves Walking Function and Reduces Sedentary Time in Community-Dwelling Older Adults. J. NeuroEng. Rehabil. 2022, 19, 144. [Google Scholar] [CrossRef]
- Yang, C.; Yu, L.; Xu, L.; Yan, Z.; Hu, D.; Zhang, S.; Yang, W. Current Developments of Robotic Hip Exoskeleton toward Sensing, Decision, and Actuation: A Review. Wearable Technol. 2022, 3, e15. [Google Scholar] [CrossRef]
- Seo, K.; Kim, K.; Park, Y.J.; Cho, J.-K.; Lee, J.; Choi, B.; Lim, B.; Lee, Y.; Shim, Y. Adaptive Oscillator-Based Control for Active Lower-Limb Exoskeleton and Its Metabolic Impact. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, Australia, 21–25 May 2018; pp. 6752–6758. [Google Scholar]
- Kim, J.; Lee, G.; Heimgartner, R.; Arumukhom Revi, D.; Karavas, N.; Nathanson, D.; Galiana, I.; Eckert-Erdheim, A.; Murphy, P.; Perry, D.; et al. Reducing the Metabolic Rate of Walking and Running with a Versatile, Portable Exosuit. Science 2019, 365, 668–672. [Google Scholar] [CrossRef] [PubMed]
- Gordon, D.F.N.; McGreavy, C.; Christou, A.; Vijayakumar, S. Human-in-the-Loop Optimization of Exoskeleton Assistance Via Online Simulation of Metabolic Cost. IEEE Trans. Robot. 2022, 38, 1410–1429. [Google Scholar] [CrossRef]
- Slade, P.; Kochenderfer, M.J.; Delp, S.L.; Collins, S.H. Personalizing Exoskeleton Assistance While Walking in the Real World. Nature 2022, 610, 277–282. [Google Scholar] [CrossRef] [PubMed]
- Tu, X.; Li, M.; Liu, M.; Si, J.; Huang, H.H. A Data-Driven Reinforcement Learning Solution Framework for Optimal and Adaptive Personalization of a Hip Exoskeleton. In Proceedings of the 2021 IEEE International Conference on Robotics and Automation (ICRA), Xi’an, China, 30 May–5 June 2021; pp. 10610–10616. [Google Scholar]
- Wang, W.; Chen, J.; Ji, Y.; Jin, W.; Liu, J.; Zhang, J. Evaluation of Lower Leg Muscle Activities During Human Walking Assisted by an Ankle Exoskeleton. IEEE Trans. Ind. Inf. 2020, 16, 7168–7176. [Google Scholar] [CrossRef]
- Qian, Y.; Han, S.; Wang, Y.; Yu, H.; Fu, C. Toward Improving Actuation Transparency and Safety of a Hip Exoskeleton with a Novel Nonlinear Series Elastic Actuator. IEEE/ASME Trans. Mechatron. 2023, 28, 417–428. [Google Scholar] [CrossRef]
- Nesler, C.; Thomas, G.; Divekar, N.; Rouse, E.J.; Gregg, R.D. Enhancing Voluntary Motion with Modular, Backdrivable, Powered Hip and Knee Orthoses. IEEE Robot. Autom. Lett. 2022, 7, 6155–6162. [Google Scholar] [CrossRef] [PubMed]
- Zhang, T.; Tran, M.; Huang, H. Admittance Shaping-Based Assistive Control of SEA-Driven Robotic Hip Exoskeleton. IEEE/ASME Trans. Mechatron. 2019, 24, 1508–1519. [Google Scholar] [CrossRef]
- Uchida, T.K.; Seth, A.; Pouya, S.; Dembia, C.L.; Hicks, J.L.; Delp, S.L. Simulating Ideal Assistive Devices to Reduce the Metabolic Cost of Running. PLoS ONE 2016, 11, e0163417. [Google Scholar] [CrossRef]
- Wang, L.T.; Van Asseldonk, E.H.F.; Van Der Kooij, H. Model Predictive Control-Based Gait Pattern Generation for Wearable Exoskeletons. In Proceedings of the 2011 IEEE International Conference on Rehabilitation Robotics, Zurich, Switzerland, 29 June–1 July 2011; pp. 1–6. [Google Scholar]
- Cain, S.M.; Gordon, K.E.; Ferris, D.P. Locomotor Adaptation to a Powered Ankle-Foot Orthosis Depends on Control Method. J. NeuroEng. Rehabil. 2007, 4, 48. [Google Scholar] [CrossRef]
- Ingraham, K.A.; Remy, C.D.; Rouse, E.J. The Role of User Preference in the Customized Control of Robotic Exoskeletons. Sci. Robot. 2022, 7, eabj3487. [Google Scholar] [CrossRef]
- Steele, K.M.; Jackson, R.W.; Shuman, B.R.; Collins, S.H. Muscle Recruitment and Coordination with an Ankle Exoskeleton. J. Biomech. 2017, 59, 50–58. [Google Scholar] [CrossRef] [PubMed]
- Carpenter, M.B. The Co-ordination and Regulation of Movements. J. Neuropathol. Exp. Neurol. 1968, 27, 348. [Google Scholar] [CrossRef]
- d’Avella, A.; Saltiel, P.; Bizzi, E. Combinations of Muscle Synergies in the Construction of a Natural Motor Behavior. Nat. Neurosci. 2003, 6, 300–308. [Google Scholar] [CrossRef] [PubMed]
- Chvatal, S.A.; Ting, L.H. Common Muscle Synergies for Balance and Walking. Front. Comput. Neurosci. 2013, 7, 48. [Google Scholar] [CrossRef] [PubMed]
- Bach, M.M.; Daffertshofer, A.; Dominici, N. Muscle Synergies in Children Walking and Running on a Treadmill. Front. Hum. Neurosci. 2021, 15, 637157. [Google Scholar] [CrossRef] [PubMed]
- Choi, Y.; Kim, Y.; Kim, M.; Yoon, B. Muscle Synergies for Turning During Human Walking. J. Mot. Behav. 2019, 51, 1–9. [Google Scholar] [CrossRef] [PubMed]
- Li, Z.; Liu, H.; Yin, Z.; Chen, K. Muscle Synergy Alteration of Human During Walking with Lower Limb Exoskeleton. Front. Neurosci. 2019, 12, 1050. [Google Scholar] [CrossRef]
- Liu, Y.-X.; Gutierrez-Farewik, E.M. Joint Kinematics, Kinetics and Muscle Synergy Patterns During Transitions Between Locomotion Modes. IEEE Trans. Biomed Eng. 2023, 70, 1062–1071. [Google Scholar] [CrossRef]
- Yang, W.; Yan, Z.; Yu, L.; Feng, L.; Gui, L.; Yang, C. Muscle Synergy-Based Human-in-the-Loop Optimization for Personalized Hip Exoskeleton Control. In Proceedings of the 2023 International Conference on Advanced Robotics and Mechatronics (ICARM), Sanya, China, 8–10 July 2023; pp. 73–78. [Google Scholar]
- Zhou, C.; Yang, L.; Liao, H.; Liang, B.; Ye, X. Ankle Foot Motion Recognition Based on Wireless Wearable sEMG and Acceleration Sensors for Smart AFO. Sens. Actuators A Phys. 2021, 331, 113025. [Google Scholar] [CrossRef]
- Zhang, J.; Fiers, P.; Witte, K.A.; Jackson, R.W.; Poggensee, K.L.; Atkeson, C.G.; Collins, S.H. Human-in-the-Loop Optimization of Exoskeleton Assistance during Walking. Science 2017, 356, 1280–1284. [Google Scholar] [CrossRef]
- Hu, L.; Luo, X.; Tang, S.; Wu, X.; Chen, L.; Zheng, X.; Hou, W. Research on Power-Assisted Strategy and Device Based on Muscle Synergy. In Proceedings of the 2019 IEEE International Conference on Computational Intelligence and Virtual Environments for Measurement Systems and Applications (CIVEMSA), Tianjin, China, 14–16 June 2019; pp. 1–5. [Google Scholar]
- Rabbi, M.F.; Pizzolato, C.; Lloyd, D.G.; Carty, C.P.; Devaprakash, D.; Diamond, L.E. Non-Negative Matrix Factorisation Is the Most Appropriate Method for Extraction of Muscle Synergies in Walking and Running. Sci. Rep. 2020, 10, 8266. [Google Scholar] [CrossRef]
- Chia Bejarano, N.; Pedrocchi, A.; Nardone, A.; Schieppati, M.; Baccinelli, W.; Monticone, M.; Ferrigno, G.; Ferrante, S. Tuning of Muscle Synergies During Walking Along Rectilinear and Curvilinear Trajectories in Humans. Ann. Biomed Eng. 2017, 45, 1204–1218. [Google Scholar] [CrossRef]
- Clark, D.J.; Ting, L.H.; Zajac, F.E.; Neptune, R.R.; Kautz, S.A. Merging of Healthy Motor Modules Predicts Reduced Locomotor Performance and Muscle Coordination Complexity Post-Stroke. J. Neurophysiol. 2010, 103, 844–857. [Google Scholar] [CrossRef] [PubMed]
- Xu, L.; Liu, X.; Chen, Y.; Yu, L.; Yan, Z.; Yang, C.; Zhou, C.; Yang, W. Reducing the Muscle Activity of Walking Using a Portable Hip Exoskeleton Based on Human-in-the-Loop Optimization. Front. Bioeng. Biotechnol. 2023, 11, 1006326. [Google Scholar] [CrossRef] [PubMed]
- Ding, Y.; Kim, M.; Kuindersma, S.; Walsh, C.J. Human-in-the-Loop Optimization of Hip Assistance with a Soft Exosuit during Walking. Sci. Robot. 2018, 3, eaar5438. [Google Scholar] [CrossRef] [PubMed]
- Ding, Y.; Galiana, I.; Asbeck, A.T.; De Rossi, S.M.M.; Bae, J.; Santos, T.R.T.; De Araujo, V.L.; Lee, S.; Holt, K.G.; Walsh, C. Biomechanical and Physiological Evaluation of Multi-Joint Assistance with Soft Exosuits. IEEE Trans. Neural Syst. Rehabil. Eng. 2017, 25, 119–130. [Google Scholar] [CrossRef] [PubMed]
- Tresch, M.C.; Cheung, V.C.K.; d’Avella, A. Matrix Factorization Algorithms for the Identification of Muscle Synergies: Evaluation on Simulated and Experimental Data Sets. J. Neurophysiol. 2006, 95, 2199–2212. [Google Scholar] [CrossRef] [PubMed]
- Lambert-Shirzad, N.; Van Der Loos, H.F.M. On Identifying Kinematic and Muscle Synergies: A Comparison of Matrix Factorization Methods Using Experimental Data from the Healthy Population. J. Neurophysiol. 2017, 117, 290–302. [Google Scholar] [CrossRef] [PubMed]

| Iterative Process for Optimizing Assistive Torque |
|---|
| Input: |
| Initial Assistive Profile Parameters |
| to T do |
| Fit Assistive Profile—Human Musculoskeletal Synergy Similarity Model ; |
| // Determine the next sampling point based on the maximum value of the acquisition function |
| // Measure sEMG to calculate lower limb muscular synergy Similarity |
| ; |
| end for |
| Subject | Height (cm) | Weight (kg) | Age (Year) | BMI (kg/m2) |
|---|---|---|---|---|
| S1 | 168 | 64 | 22 | 22.7 |
| S2 | 173 | 73 | 24 | 24.4 |
| S3 | 173 | 62 | 22 | 20.7 |
| S4 | 182 | 71 | 23 | 21.4 |
| S5 | 178 | 61 | 24 | 19.3 |
| S6 | 170 | 70 | 35 | 24.2 |
| Mean ± std | 174 ± 4.7 | 66.8 ± 4.7 | 25.0 ± 4.5 | 22.1 ± 1.9 |
| No. | Walking Speed | Assist Torque Profile |
|---|---|---|
| 1 | 1 m/s | Zero Torque (ZT) |
| 2 | 1 m/s | Predefined Profile (PD) |
| 3 | 1 m/s | Optimal result of Bayesian Optimization (BO1) |
| 4 | 1 m/s | Sub-optimal result of Bayesian Optimization (BO2) |
| Subject | Total Iterations | Iterations of Optimal | Iterations of Sub-Optimal | Optimal | Sub-Optimal |
|---|---|---|---|---|---|
| S1 | 64 | 50 | 1 | 0.69 | 0.69 |
| S2 | 64 | 35 | 53 | 0.84 | 0.82 |
| S3 | 35 | 10 | 13 | 0.75 | 0.74 |
| S4 | 64 | 27 | 26 | 0.91 | 0.90 |
| S5 | 48 | 4 | 34 | 0.92 | 0.90 |
| S6 | 64 | 42 | 46 | 0.84 | 0.83 |
| Mean ± std | 56.5 ± 11.3 | 28.0 ± 16.5 | 28.8 ± 18.0 | 0.83 ± 0.09 | 0.81 ± 0.08 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ma, Y.; Liu, D.; Yan, Z.; Yu, L.; Gui, L.; Yang, C.; Yang, W. Optimizing Exoskeleton Assistance: Muscle Synergy-Based Actuation for Personalized Hip Exoskeleton Control. Actuators 2024, 13, 54. https://doi.org/10.3390/act13020054
Ma Y, Liu D, Yan Z, Yu L, Gui L, Yang C, Yang W. Optimizing Exoskeleton Assistance: Muscle Synergy-Based Actuation for Personalized Hip Exoskeleton Control. Actuators. 2024; 13(2):54. https://doi.org/10.3390/act13020054
Chicago/Turabian StyleMa, Yehao, Dewei Liu, Zehao Yan, Linfan Yu, Lianghong Gui, Canjun Yang, and Wei Yang. 2024. "Optimizing Exoskeleton Assistance: Muscle Synergy-Based Actuation for Personalized Hip Exoskeleton Control" Actuators 13, no. 2: 54. https://doi.org/10.3390/act13020054
APA StyleMa, Y., Liu, D., Yan, Z., Yu, L., Gui, L., Yang, C., & Yang, W. (2024). Optimizing Exoskeleton Assistance: Muscle Synergy-Based Actuation for Personalized Hip Exoskeleton Control. Actuators, 13(2), 54. https://doi.org/10.3390/act13020054