1. Introduction
Force control is nowadays a mature technology spread among a wide plethora of industrial (e.g., collaborative and legged robots) and medical (e.g., rehabilitation and assistive robotics) applications. Although force control issues have been deeply investigated over the years, achieving high-quality force control is still challenging. Indeed, control accuracy depends not only on the robot dynamics (which may include undesired non-linear effects) but also on the unknown environment dynamics, which may critically affect performance and stability [
1,
2,
3]. To shed light on this kind of issue, the benchmarking of force control algorithms has been recently investigated [
4,
5,
6,
7]. Although issues due to the interacting environment have been recognized by the robotics community, it is quite surprising that existing works on force control benchmarking have not adequately addressed them [
5,
6,
7,
8,
9]. For example, in [
7] the environment is just considered as “a dummy load of 2.5 kg attached at the tip of the link”, while in [
9] the authors propose using “environmental conditions that model a worst-case scenario with the highest possible effective contact stiffness”. This latter case is particularly controversial, as in force control applications stiff environments are quite critical for what concerns stability, but at the same time, they represent the best-case scenario for performance (i.e., higher bandwidth is usually observed when interacting with a rigid environment with respect to a soft environment).
To fill this gap, our research team—as part of the EUROBENCH project [
10]—has recently developed the Forecast framework: a benchmarking methodology and tools able to assess the performance of different force control algorithms while considering the importance of the interacting environment [
4,
11]. Such tools include (a) a simulation framework, (b) an affordable and modular hardware testbed, (c) a low-level control framework to control the testbed and (d) a high-level graphical user interface. To foster spreading across the community, affordability has been considered to be a primal requirement. Unfortunately, affordability in mechanical design easily leads to undesired friction effects (e.g., due to axis mis-alignment) which may jeopardize the benchmarking process. For this reason, an accurate friction compensation algorithm is highly desired. Existing friction compensation approaches include model-based strategies [
12,
13,
14,
15,
16,
17,
18], adaptive controllers [
19,
20,
21,
22,
23], and disturbance observers (DOBs) [
15,
24,
25,
26]. Unfortunately, most of these strategies are not suitable for a force control benchmarking application. Adaptive strategies are suitable only for position (or velocity) control problems while existing force-based DOBs do not distinguish disturbances due to friction from disturbances due to the interacting environment and compensate for both. In particular, this latter approach is not suitable for a benchmarking application as friction needs to be compensated without altering environment-related effects, including stability. Also, robust force control algorithms do not clearly separate friction compensation and control action, which is a mandatory requirement for our application as explained at the end of this section. Thus, among existing solutions, only model-based approaches are suitable for a force control benchmarking application.
Unfortunately, existing force control benchmarking approaches do not deeply address friction-related issues that could affect the benchmarking outcomes. For example, in [
5] the authors simply neglect friction as they do not see “reliable possibilities to establish standardized friction conditions which allow for the comparison of results”. Moreover, in [
8] authors have to perform multiple experiments to assess the benchmarking results eventually using a “possible model-based friction compensation”. Therefore, we believe that the algorithm proposed in this paper could be a significant contribution to developing reliable force control benchmarking solutions.
This paper proposes a novel friction observer which, by assuming knowledge of the environment dynamics, outperforms existing model-based friction compensation solutions. Indeed, within the Forecast framework, we know the interacting environment at every step of the benchmarking process. Thus, we can include the environment dynamics in the nominal plant of the proposed observer in order to reject disturbances exclusively related to mechanical inaccuracies (e.g., undesired friction/stiction effects). To experimentally assess the friction compensation capabilities of the proposed approach, a comparison with a widespread model-based technique is reported. Furthermore, the stability margins of the proposed friction observer are analyzed and compared with those of state-of-the-art DOBs. In fact, by altering environment-related effects, these solutions may negatively affect stability margins.
Before proceeding, is important to highlight that the objective of this paper is not to make a force controller more robust to friction disturbances. Instead, the objective is to make a benchmarking system more robust to disturbances due to friction which unpredictably affect the benchmarking outcome. Exactly for this reason, suitable friction compensation algorithms must not include any force control action and not alter the system stability. In other words, we need to make a clear distinction between the friction compensator, which will be an inherent part of the benchmarking system, and the force control algorithm which will be the object to be benchmarked.
The paper is organized as follows.
Section 2 briefly introduces the Forecast project and its affordable testbed while
Section 3 introduces the system modeling and reviews existing friction compensation solutions. The proposed friction observer and the relation with existing DOBs are discussed in
Section 4, while a stability robustness analysis is carried out in
Section 5. Simulation outcomes concerning friction compensation accuracy of the proposed EA-FOB are shown in
Section 6 while experiments concerning both stability and accuracy are presented in
Section 7. Conclusions are drawn in
Section 8.
2. The Forecast Project
The friction compensation algorithm proposed in this paper allows a generic force control benchmarking system to avoid inconsistencies in the results arising from variable friction phenomena. In this paper, we will consider the Forecast framework, which is the benchmarking solution designed by our team.
The idea of the Forecast project originates from recognizing the importance of the environment in assessing force control performance. In fact, force-controlled systems are today tested on too narrow a set of environmental conditions, possibly leading to biased evaluations. Instead, a proper evaluation of force control algorithms should include a whole set of environments of interest in order to understand the average, best-case and worst-case performance of the considered application. The Forecast benchmarking methodology evaluates the behavior of a given controlled system in the presence of disturbances and in response to a well-defined force reference. The main difference with respect to common practices and existing works, relies on considering a whole set of environments of interest to evaluate such behaviour. Performance indicators are computed by taking into account the whole set of interacting environments. For this reason, the Forecast testbed comes with a Virtual Environment Module (VEM) which includes a brushed DC actuator and a torque sensor. Such a module is able to display a wide range of different environments described in terms of inertia
J, stiffness
and damping
d. Within the Forecast project, we devoted specific efforts to accurate and robust environment rendering which is based on both the admittance and impedance controllers [
27] over a motor with an extremely low rotor inertia. The result of this effort is the ability to accurately render a virtual environment which motivates the name “Virtual Environment Module”.
An in-depth explanation of the benchmarking methodology is out of the scope of this paper. For further details, the reader can refer to [
4].
Accuracy and Affordability
Affordable in-house-built hardware testbeds may suffer from mechanical inaccuracies that could dramatically compromise the benchmarking outcomes. Thus, it becomes necessary to guarantee accurate and non-biased benchmarking despite such mechanical inaccuracies.
The mechanical structure of the affordable Forecast Testbed has been realized with laser-cut and welded iron layers. To combine sensors and actuators with different rotation shaft diameters we used Oldham couplers which allowed us to re-arrange the modules maximizing the modularity. A picture of the Forecast testbed is shown in
Figure 1, where (1) is main the actuator, (2) the actuator encoder, (3) a series spring, (4) the environment encoder, (5) the torque sensor, (6) the VEM. The spring module is based on harmonic steel leaves with different thicknesses and different stiffness as a consequence. The user can compose leaves in order to achieve the desired torsional stiffness. A detailed CAD model of the spring module can be seen in
Figure 1b. Testbed parameters are reported in
Table 1.
Mechanical inaccuracies are mainly due to shaft misalignments between different modules which lead to angle-dependent friction effects. In particular, in the testbed shown in
Figure 1 we observed diverse stiction (i.e., static friction) magnitudes, diverse stick-slip dynamics (due to holdham joint sliding), and diverse Stribeck curves (due to lubricated bearings), depending on the initial position of the actuator.
Figure 2a considers experimental and simulated actuator torques during a proportional-integrative (
) velocity control with
P = 0.1 and
I = 10. The values of
P and
I are manually adjusted to reach a stable and smooth control. By looking at the figure, the reader can observe periodic friction ripples on the measured motor torque
.
Figure 2b highlights how diverse and uncertain stick-slip phenomena significantly affect the actuator velocity (
) and torque (
).
Figure 2c reports three different friction identification experiments considering three different initial positions of the actuator to highlight the diverse stiction effects and Stribeck curves. Each dot in the figure comes from a single experiment and is obtained by averaging the measured velocity and torque values. For each of the three initial configurations, a total of 12 experiments were conducted (six experiments considering positive torques and velocities and six experiments considering negative torques and velocities). Each color corresponds to a set of experiments associated with a specific initial configuration. Data were collected in an open loop at zero velocity to improve the identification of the static friction and under the feedback action of a velocity control at low velocities to improve the identification of the Stribeck curve.
By looking at the Figure it can be observed that different initial positions of the actuator lead to different friction profiles. In particular, different stiction effects and different Stribeck curves can be observed. Conversely, Coulomb and viscous friction profiles appear to be quite consistent regardless of the initial configuration of the motor.
Such friction makes it hard to obtain accurate benchmarking because the testbed behaves quite differently between each test. This is shown in
Figure 3, considering PD force control experiments in a soft interacting environment. The reader can notice how undesired friction effects lead to significantly different behaviors and, consequently, different benchmarking outcomes, despite the same control algorithm with the same tuning being applied.
4. Environment Aware Friction Observer
Generally speaking, DOB-based force controllers aim to enforce a nominal model
to the force dynamics despite environment uncertainties and unmodelled disturbances. DOB-based force control of SEAs is an established research topic [
7,
13,
25,
26,
31]. Different solutions have been proposed which can be classified as:
Open-loop DOBs [
13,
32], where disturbance rejection is applied exclusively to the plant dynamics,
Closed-loop DOBs [
26,
33], which aim to reject disturbances on the entire closed-loop force dynamics.
SinceRoozing et al. have recognized the equivalence between these two DOB architectures [
34], this paper focuses solely on the open-loop (OL) configuration shown in
Figure 5. In this case, the force dynamics between
u (i.e., the output of the force controller) and
is expressed as:
Within the Forecast framework, we are aware of the environment dynamics at every step of the benchmarking process (i.e., parameters
,
and
are known). This allows us to consider a novel DOB architecture that we call environment-aware friction observer (EA-FOB). Since the EA-FOB is designed to compensate friction, the nominal plant
recalls the one expressed in (3) while excluding the term
:
Different from existing DOB solutions, the environment is no longer treated as an unknown disturbance to be rejected but becomes an integral part of the nominal plant. This leads the EA-FOB action to reject disturbances due to mechanical friction effects. For this reason, in this paper, we propose to use the EA-FOB as an inner loop during the benchmarking process with the specific objective of rejecting disturbance only due to friction.
In the following sections, we show how existing DOB solutions are related to the proposed EA-FOB and how the latter does not alter the inherent stability properties of the system. The same does not hold for other existing DOB architectures.
4.1. Relations with DOB-Based Force Control for SEAs
Existing OL-DOBs solutions assume the following nominal plants .
4.1.1. Nominal Plant with Locked-Output (LO-DOB)
In [
32], Hopkins et al. proposed an open-loop DOB architecture to enforce the force dynamics of a series elastic humanoid to the sole locked-output actuator dynamics. This leads such DOBs to reject disturbances due to the humanoid frame dynamics, unmodelled friction effects and time-varying interacting environment. In practice, the considered nominal model describes the interaction with an infinitely stiff environment, i.e., a locked-output system configuration. Such approximation can be formally expressed as a special case of our nominal model (
5) where the environment stiffness is infinite:
4.1.2. Nominal Plant with Link Dynamics (LD-DOB)
Oh et al. recently proposed using a two-mass SEA nominal model that neglects the interaction forces with the environment but includes the link dynamics [
31,
35]. This case is equivalent to considering:
in Equation (
5), where
represents the link inertia and
is the link damping. Therefore, the nominal plant can be expressed as:
Thus, both the LO-DOB and LD-DOB are particular cases of the EA-FOB. The reader can indeed observe how (
6) and (
8) just consider a “partial”
in (
5).
Although the friction compensation capabilities of such DOB solutions have been proven to be effective [
25,
26,
32,
35,
36], it is important to state that they cannot be exploited within the Forecast project as they lead to the rejection of the environment dynamics too. Since the Forecast project needs to evaluate force algorithm performance when interacting with different environments, the proposed EA-FOB is able to accurately compensate only friction effects without altering the environment dynamics, thus ensuring proper benchmarking.
5. Stability Robustness Analysis
In this Section, we show that differently from the LO-DOB and the LD-DOB, the proposed EA-FOB does not significantly alter the inherent stability of the system and thus, guarantees a non-biased benchmarking process. The reason behind this comparison is that in many practical cases, DOBs may heavily alter the closed-loop stability. This happens because the DOB nominal model may be significantly different from the system dynamics and this leads to lower stability margins. In these cases, an aggressive filter
is needed to mitigate such model mismatch and to guarantee closed-loop stability [
37,
38,
39]. However, using a slow filter may lead to some disadvantages, including the inability to reject high-frequency friction disturbances such as stiction and stick-slip effects. This requires redesigning the
filter to find a reasonable trade-off between performance and stability robustness [
40]. The focus of this section is to showcase that the EA-FOB can tolerate a reasonably high
frequency filter while showing higher stability margins, despite environment uncertainties, with respect to other existing DOB-based force control approaches. As mentioned before, other DOBs are not suitable for our purpose since they cannot isolate friction effects, and they are considered here only for stability comparison purposes.
Although gain and phase margin represent classical approaches to determining the stability and robustness of a system, they suffer from some limitations. Even if both magnitude and phase affect system stability, simultaneous magnitude and phase perturbations are not captured by classical margins. As a consequence, small simultaneous plant perturbations may cause stability issues even if the system has high gain and high phase margins [
41]. For this reason, we adopt a recently proposed approach called disk margins (DM) [
41]. Disk margins are robust stability measures that account for simultaneous gain and phase perturbations.
Let us define
f as a complex-valued multiplicative factor describing simultaneous gain and phase perturbations of an open-loop system
. In extremely simple words, DM defines the largest circular area
D which encloses all the complex perturbations
f such that closed-loop with
is well-posed and stable. Even if disk margins represent a more comprehensive approach than classical margins they are still conservative as they account only for a circular sub-area of the perturbation space. An in-depth analysis of DM is out of the scope of this paper, for further details see [
41].
Stability Robustness Comparison
In this subsection, we use DMs to assess the robustness of the proposed EA-FOB. Stability robustness is assessed considering a soft interacting environment expressed as
,
, and a stiff interacting environment expressed as
,
. The value of
is set to reach a critically damped environment. We accounted also for the link dynamics, modeled as a rigid body having inertia
and damping
, and coupled with the environment (i.e.,
,
). The cutoff frequency
of the DOB
filter is set to 1 Hz, 5 Hz and 10 Hz, respectively. DM results are shown in
Figure 6. Since the disk area is mirrored with respect to the real axis, in this paper we will adopt a more compact representation considering only the upper half-disk representation.
Figure 6a shows DMs for the case of a soft environment where the main interacting dynamics are given by the link. Since the considered scenario resembles the LD-DOB nominal plant (
8), the LD-DOB achieves higher stability margins while the LO-DOB significantly deteriorates the inherent plant stability as the frequency
increases. On the other hand,
Figure 6b shows DMs in the case of a stiff interacting environment. In this case, the reader can observe higher stability margins for the LO-DOB. This is expected since such a DOB considers a nominal plant interacting with an infinitely stiff environment. Conversely, the LD-DOB deteriorates the inherent plant stability, leading even to an unstable behavior for
(as indicated by the disappearance of the dark red disk). The EA-FOB always shows higher stability margins extremely close to the plant itself regardless of the environment, outperforming the other solutions. The very small difference between the DM of EA-FOB and the plant itself (particularly highlighted when
Hz) is due to the friction parameter
which is set to zero in the nominal plant. This represents a worst-case condition (since an estimation of
can be easily obtained in practice) where the the EA-FOB is enforced to fully compensate for friction forces. Nevertheless, as observed before, the stability margins of the EA-FOB remain extremely close to those of the original plant. Such impressive stability and robustness can be explained by considering that the EA-FOB nominal plant is always close to the real one. Differently, the other DOB solutions consider approximated or partial models for the environment which lead to larger deviations from the real plant.
6. Simulation Results
This section compares the friction compensation accuracy of the EA-FOB with that of an SFM in a simulated environment. The real-world friction affecting the actuator dynamics is simulated considering the LuGre model [
24]. This model allows us to account for both static and dynamic friction effects, showcasing the EA-FOB capabilities to accurately observe them. The parameters reported in
Table 2 are chosen for simulation purposes only.
Simulations are carried out in Matlab considering the block diagram shown in
Figure 5, where
is a simple
controller tuned to provide a control bandwidth around 10 Hz when interacting with a high-impedance environment (
,
=
). This leads to
and
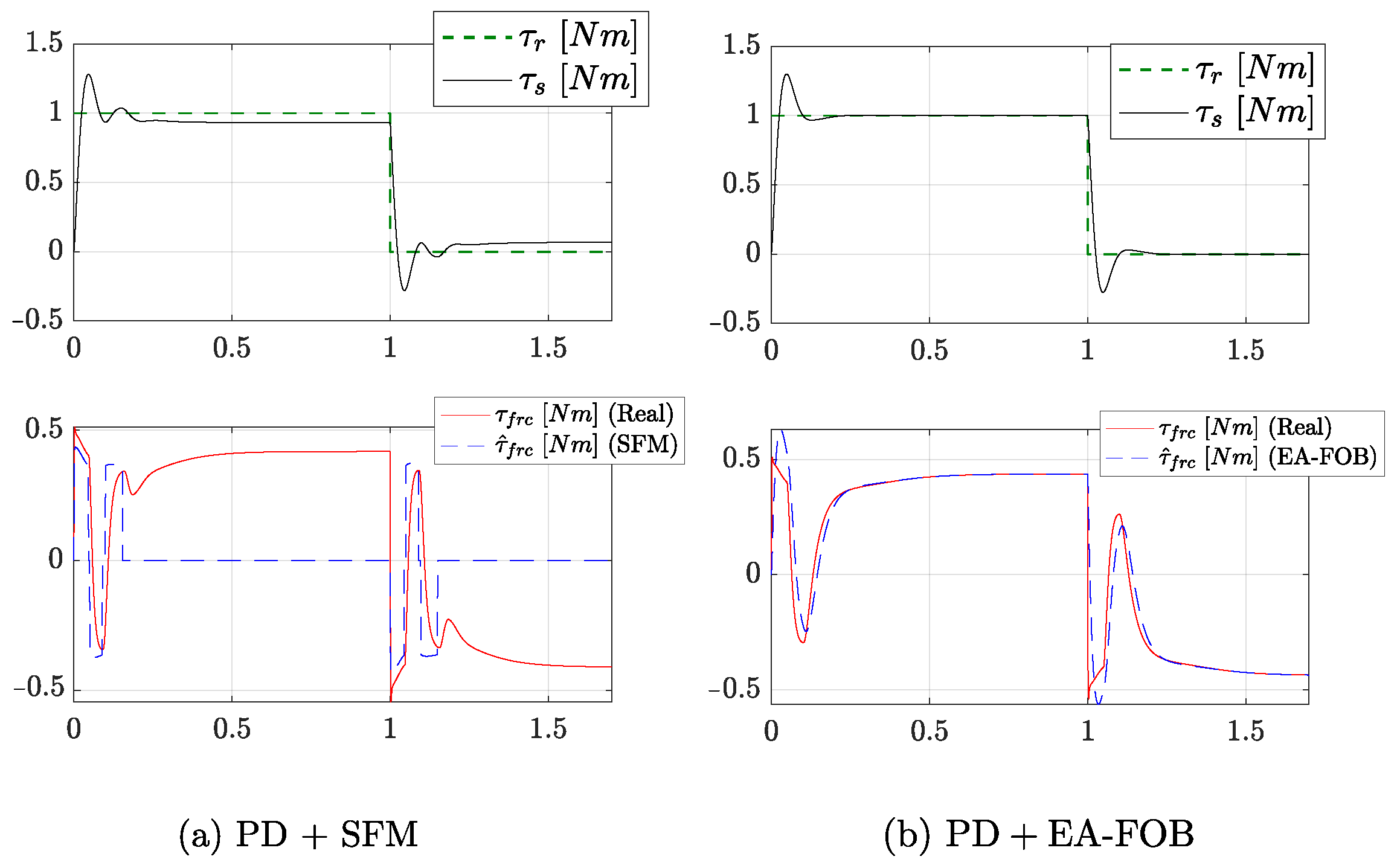
. Simulation results are shown in
Figure 7. The left side shows the results of SFM compensation while the right side shows the results of the EA-FOB compensation. The upper plots show the torque tracking performance, where
is a
square wave (drawn in gray) and
is the spring torque (drawn in black). In the lower plots,
(drawn in red) represents the simulated friction torque while
(blue dashed line) represents the estimated friction torque. In the case of SFM,
is defined as:
where
and
represent the viscous and the Coulomb friction parameters, respectively. In the case of EA-FOB,
is defined as:
where
is the EA-FOB nominal plant defined in (
5) while the cutoff frequency
of the
filter is set to 10 Hz.
By looking at the plots, one can observe that the proposed EA-FOB exhibits a superior accuracy in observing friction with respect to an SFM. Indeed, the mean absolute error (MAE) between and is Nm in the case of SFM and Nm in the case of EA-FOB. Moreover, it can be clearly seen that the EA-FOB compensates for disturbances due to friction while ignoring other disturbances, e.g., due to the interacting environment.
7. Experimental Results
The objective of the experiments is to evaluate the friction compensation capabilities of the proposed EA-FOB and to validate the stability considerations reported in
Section 5. Experiments are carried out using the Forecast testbed shown in
Figure 1. In this setup, motors are driven in current control mode using a commercial driver (ESCON 50/5) while the force control algorithms run on an embedded board (Nucleo F446RE) as a periodic hard real-time process with a frequency of 2 kHz. Two optical encoders (DHO-05) with an extremely high resolution (2,000,000 pulses per revolution) are used to measure the motor position
and the environment position
q. The feedback torque
is measured using spring deflection according to (
1). Such spring has a linear stiffness profile and negligible inherent friction, as shown in
Figure 8.
To experimentally evaluate the friction compensation capabilities of the proposed EA-FOB, we evaluate how much the undesired friction effects affecting the Forecast testbed can be reduced. A comparison with SFM compensation is carried out. It is important to specify that only Coulomb and viscous friction can be conveniently compensated as they exhibit invariant dynamics. Conversely, stick-slip phenomena, static friction effects and Stribeck curves are extremely uncertain, as shown in
Figure 2.
In optimal conditions, the force control response should be repeatable and not influenced by variabilities due to friction effects. Thus, the objective of the experiments is to measure the repeatability of ten step responses. Each experiment considers the same control tuning and the same interacting environment. Since the mechanical friction of our testbed depends not only on the velocity
, but also on the angle
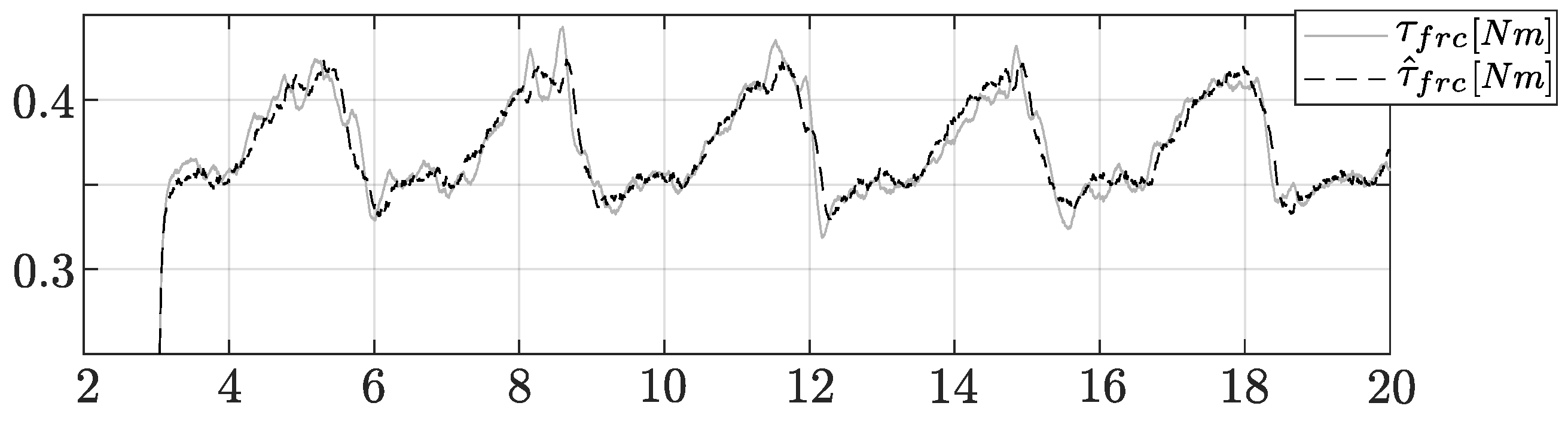
with periodic trends, we considered an extended SFM which includes sine and cosine functions based on the actuator angle. Friction parameters are identified by exploiting a least squares approach and the estimated friction torque
can be formally defined as:
where
P is the vector of friction parameters and
is defined as:
where the sine and cosine functions are shortened as
s and
c, respectively. Friction identification results are shown in
Figure 9 where
is the measured friction torque. The fitting accuracy achieved is 89.95%.
The main experimental results are reported in
Figure 10,
Figure 11 and
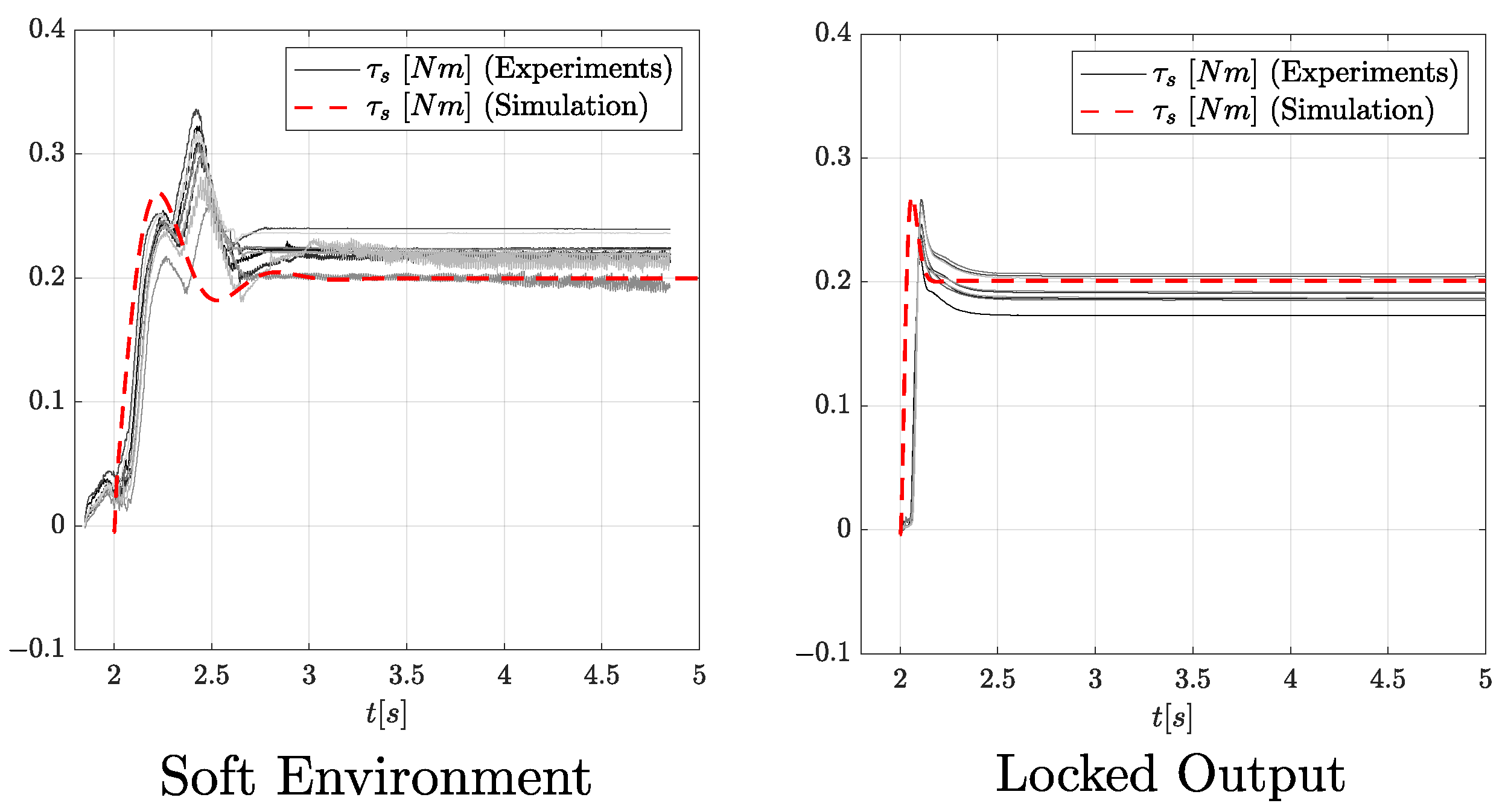
Figure 12, showing for each plot the repeatability of the ten step responses.
Figure 10 considers a PD control without any friction compensation,
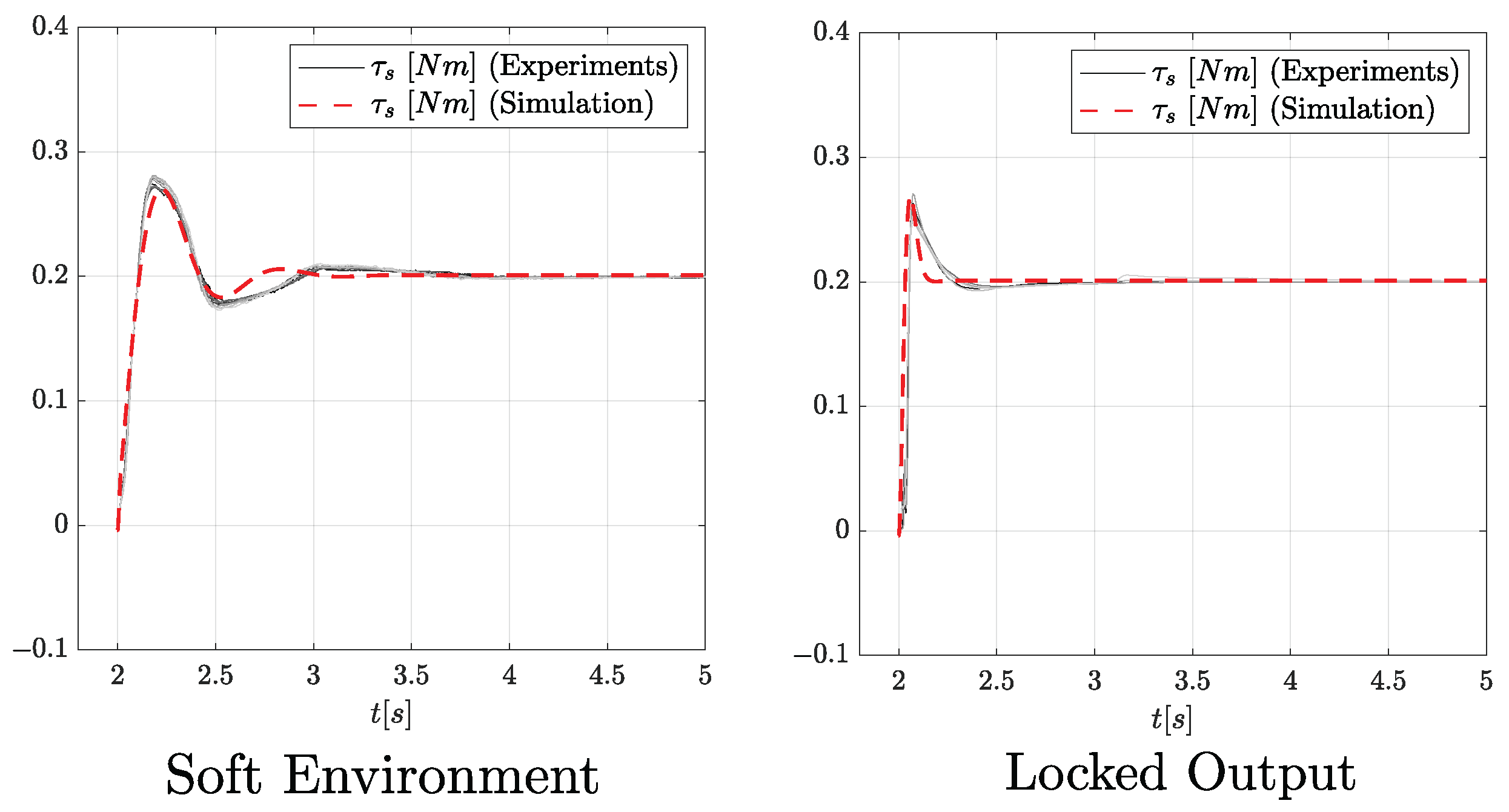
Figure 11 considers a PD with SFM friction compensation and
Figure 12 considers a PD with EA-FOB friction compensation. In each Figure, the left plot refers to a soft environment interaction (
= 0.001
and
= 5
) while the right plot refers to a locked-output configuration, specifically chosen to represent the scenario with the highest possible environment stiffness. All the experiments consider a
desired step reference. The same PD controller used in the simulation is considered (
P = 5 and
D = 0.1). The frequency
of the EA-FOB is again set to 10 Hz.
Looking at the PD responses one can observe how, without any friction compensation law, undesired friction effects critically affect the control responses leading to not repeatable behaviours.
A significant improvement can be seen by exploiting an SFM. In this case, responses look more repeatable even though undesired low-frequency oscillations and high-frequency vibrations negatively affect the performance in the soft environment case and different static errors can be observed in the locked-output case. The EA-FOB is the only solution exhibiting smooth and repeatable responses when interacting with both soft and stiff environments characterized by low static errors. Quantitatively, friction compensation capabilities are assessed by considering two metrics: the repeatability of the control responses and the mean absolute error (MAE) between the experimental and expected responses.
The repeatability of control responses is assessed by computing the mean cross-correlation among step responses of different experiment repetitions. Mean cross-correlation values are reported in
Table 3, showing that the EA-FOB and the SFM exhibit high cross-correlation indices, highlighting the repeatability of responses. Although cross-correlation is effective for measuring repeatability it does not provide sufficient insights into the friction compensation performance. For this reason, we decided to simulate how the system would perform in the absence of friction and calculate the MAE between these expected responses and the experimental ones. The expected responses are drawn as red dashed lines in
Figure 10,
Figure 11 and
Figure 12, while MAEs are reported in
Table 3. By looking at the plots, it is evident that the EA-FOB responses are closer to the simulated ones. The same does not hold for the SFM. For example, the reader may observe a slight delay between the actual and the expected response in both the stiff and soft case which is probably due to static friction. In conclusion, the metrics in
Table 3 show the superior friction compensation capabilities of the EA-FOB which guarantees higher repeatability and higher fidelity responses.
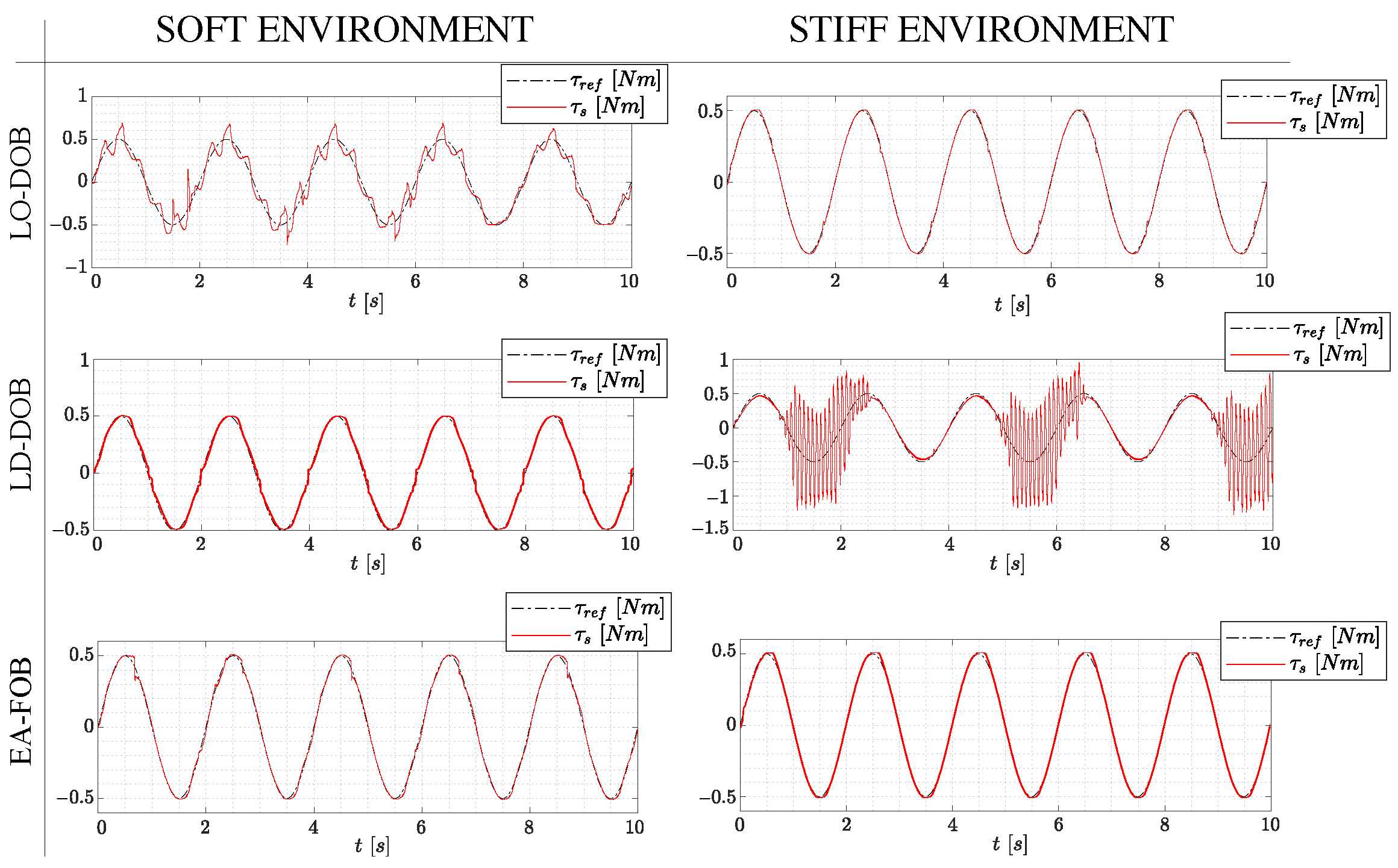
To assess the superior stability robustness of the EA-FOB with respect to an LO-DOB and LD-DOB, six different torque tracking experiments are conducted. Experiments consider a 0.5 Hz sinusoidal reference and the interaction with a soft and stiff environment. The tuning frequency of the
filter is set to 10 Hz for all DOBs. Control responses are reported in
Figure 13. In the case of a soft interacting environment, the LO-DOB response leads to undesired low-frequency oscillations. This reveals the presence of a complex conjugated pole pair which is related to lower stability margins. Similarly, the LD-DOB presents high-frequency vibrations when interacting with the stiff environment which again, can be related to lower stability margins. Instead, in all the experiments the EA-FOB shows accurate and non-oscillatory responses which can be related to higher stability margins.
In conclusion, these experimental results seem to confirm the disk margin analysis proposed in
Section 5 with the EA-FOB showing better behaviors on the whole set of interacting environments.












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}