

Stability of Stochastic Coupled Networks with Time-Varying Coupling Under Intermittent Event-Triggered Control


Abstract
1. Introduction
2. Notations and Model Formulation
2.1. Notations
2.2. Model Formulation
3. Exponential Stability Analysis for Stochastic Complex Networks
| Algorithm 1 Design of intermittent dynamic event-triggered control strategy. |
| 1: Initialize the parameters in system (1). Based on Assumptions 1 and 2, we can obtain |
| 2: Choose in intermittent dynamic event-triggered control strategy (2) with (3) and (4). |
| 3: Choose and . Calculate by Assumption 3. |
| 4: Solve Equation in Theorem 1 to acquire . Choose such that . |
| 5: Check whether condition in Theorem 1 holds. If it does, output the values of . Otherwise, return to Step 2. |
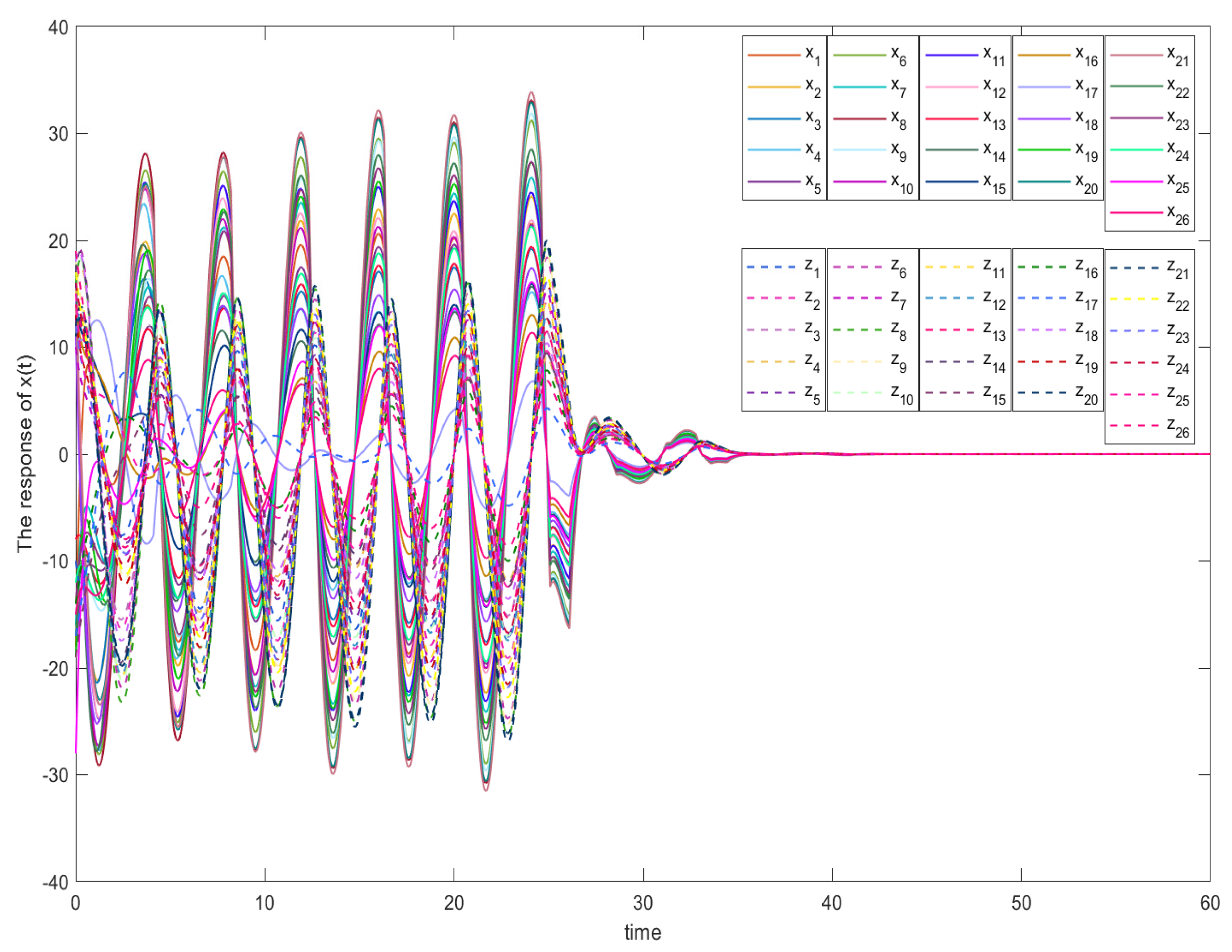
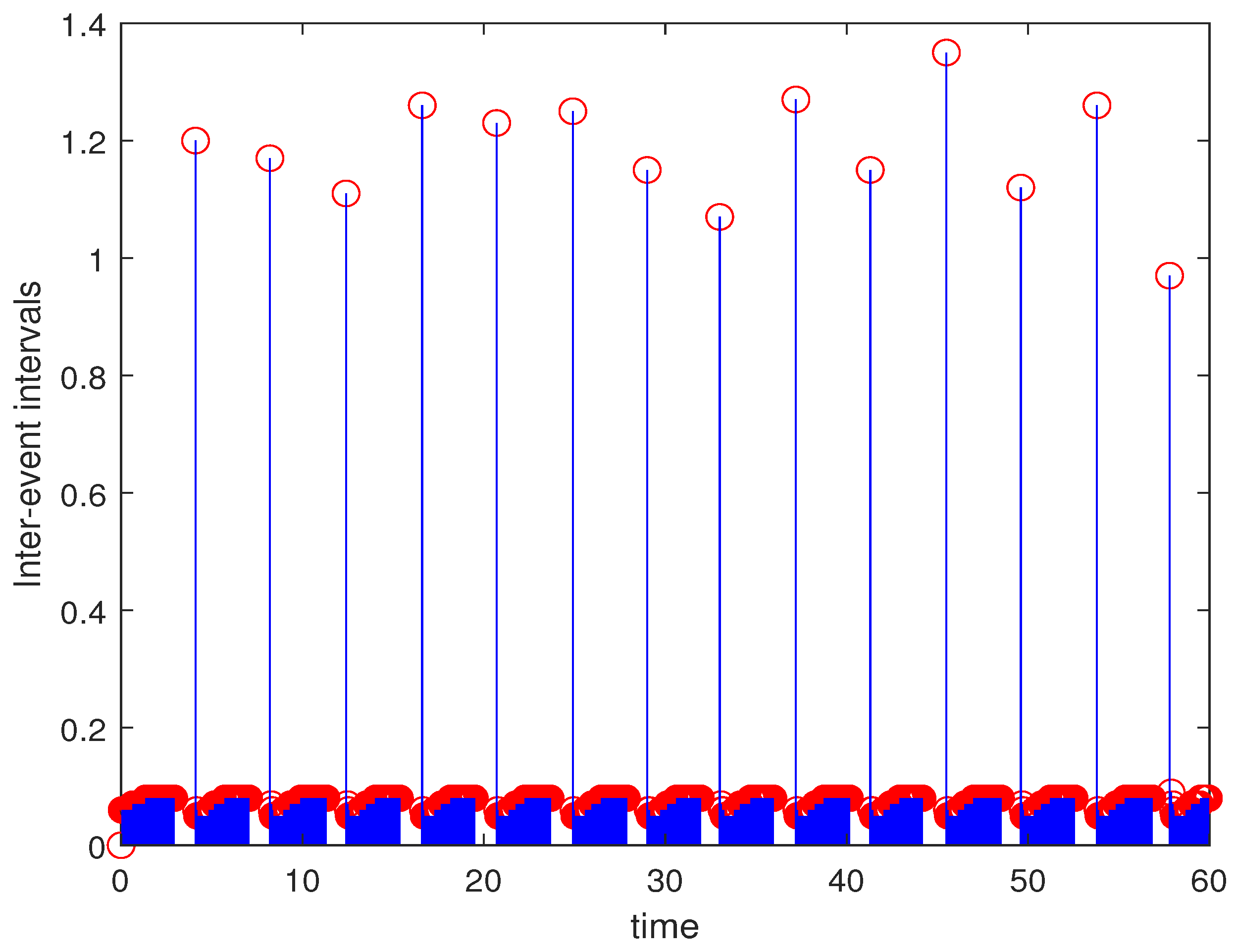
4. Applications and Numerical Simulations
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Aldana, M. Boolean dynamics of networks with scale-free topology. Phys. D Nonlinear Phenom. 2003, 185, 45–66. [Google Scholar] [CrossRef]
- Wang, J.L.; Wu, H.N.; Huang, T.; Ren, S.Y.; Wu, J.; Zhang, X.X. Analysis and control of output synchronization in directed and undirected complex dynamical networks. IEEE Trans. Neural Netw. Learn. Syst. 2018, 29, 3326–3338. [Google Scholar] [CrossRef]
- Tang, Q.; Qu, S.; Zhang, C.; Tu, Z.; Cao, Y. Effects of impulse on prescribed-time synchronization of switching complex networks. Neural Netw. 2024, 174, 106248. [Google Scholar] [CrossRef] [PubMed]
- Hu, C.; He, H.; Jiang, H. Fixed/preassigned-time synchronization of complex networks via improving fixed-time stability. IEEE Trans. Cybern. 2021, 51, 2882–2892. [Google Scholar] [CrossRef]
- Stankovski, T. Time-varying coupling functions: Dynamical inference and cause of synchronization transitions. Phys. Rev. E 2017, 95, 022206. [Google Scholar] [CrossRef]
- Tang, J.; Scellato, S.; Musolesi, M.; Mascolo, C.; Latora, V. Small-world behavior in time-varying graphs. Phys. Rev. E-Stat. Nonlinear Soft Matter Phys. 2010, 81, 055101. [Google Scholar] [CrossRef]
- Liu, Y.; Wang, Z.; Zhou, D. Scalable distributed filtering for a class of discrete-time complex networks over time-varying topology. IEEE Trans. Neural Netw. Learn. Syst. 2020, 31, 2930–2941. [Google Scholar] [CrossRef]
- Liu, Y.; Li, W.; Feng, J. The stability of stochastic coupled systems with time-varying coupling and general topology structure. IEEE Trans. Neural Netw. Learn. Syst. 2018, 29, 4189–4200. [Google Scholar] [CrossRef]
- Wu, Y.; Zhuang, S.; Li, W. Periodically intermittent discrete observation control for synchronization of the general stochastic complex network. Automatica 2019, 110, 108591. [Google Scholar] [CrossRef]
- Duan, Z.; Wang, J.; Chen, G.; Huang, L. Stability analysis and decentralized control of a class of complex dynamical networks. Automatica 2008, 44, 1028–1035. [Google Scholar] [CrossRef]
- D’Souza, R.M.; di Bernardo, M.; Liu, Y.Y. Controlling complex networks with complex nodes. Nat. Rev. Phys. 2023, 5, 250–262. [Google Scholar] [CrossRef]
- Xiong, W.; Yu, X.; Liu, C.; Wen, G.; Wen, S. Simplifying complex network stability analysis via hierarchical node aggregation and optimal periodic control. IEEE Trans. Neural Netw. Learn. Syst. 2020, 32, 3098–3107. [Google Scholar] [CrossRef]
- Su, H.; Rong, Z.; Chen, M.Z.; Wang, X.; Chen, G.; Wang, H. Decentralized adaptive pinning control for cluster synchronization of complex dynamical networks. IEEE Trans. Cybern. 2013, 43, 394–399. [Google Scholar]
- Zhou, H.; Liu, Z.; Chu, D.; Li, W. Sampled-data synchronization of complex network based on periodic self-triggered intermittent control and its application to image encryption. Neural Netw. 2022, 152, 419–433. [Google Scholar] [CrossRef]
- Zhang, G.; Shen, Y. Exponential stabilization of memristor-based chaotic neural networks with time-varying delays via intermittent control. IEEE Trans. Neural Netw. Learn. Syst. 2015, 26, 1431–1441. [Google Scholar] [CrossRef]
- Li, C.; Feng, G.; Liao, X. Stabilization of nonlinear systems via periodically intermittent control. IEEE Trans. Circuits Syst. II Express Briefs 2007, 54, 1019–1023. [Google Scholar]
- Liu, X.; Chen, T. Synchronization of complex networks via aperiodically intermittent pinning control. IEEE Trans. Autom. Control 2015, 60, 3316–3321. [Google Scholar] [CrossRef]
- Liu, B.; Yang, M.; Liu, T.; Hill, D.J. Stabilization to exponential input-to-state stability via aperiodic intermittent control. IEEE Trans. Autom. Control 2020, 66, 2913–2919. [Google Scholar] [CrossRef]
- Dimarogonas, D.V.; Frazzoli, E.; Johansson, K.H. Distributed event-triggered control for multi-agent systems. IEEE Trans. Autom. Control 2012, 57, 1291–1297. [Google Scholar] [CrossRef]
- Zhang, L.; Zhao, Z.; Ma, Z.; Zhao, N. Prescribed performance adaptive neural event-triggered control for switched nonlinear cyber–physical systems under deception attacks. Neural Netw. 2024, 179, 106586. [Google Scholar] [CrossRef]
- Liu, X.; Chen, L.; Zhao, Y.; Li, H. Adaptive event-triggered control for stability of fractional-order TS fuzzy multi-links complex networks with random coupling delay. Chaos Solitons Fractals 2023, 176, 114074. [Google Scholar] [CrossRef]
- Garcia, E.; Antsaklis, P.J. Model-based event-triggered control for systems with quantization and time-varying network delays. IEEE Trans. Autom. Control 2013, 58, 422–434. [Google Scholar] [CrossRef]
- Wu, Z.; Xu, Y.; Pan, Y.; Su, H.; Tang, Y. Event-triggered control for consensus problem in multi-agent systems with quantized relative state measurements and external disturbance. IEEE Trans. Circuits Syst. I Regul. Pap. 2018, 65, 2232–2242. [Google Scholar] [CrossRef]
- Liu, Y.; Wang, J. Synchronization of coupled systems via intermittent event-triggered control: Quaternion case. Chaos, Solitons Fractals 2021, 151, 111242. [Google Scholar] [CrossRef]
- Li, H.; Chen, Z.; Wu, L.; Lam, H.K. Event-triggered control for nonlinear systems under unreliable communication links. IEEE Trans. Fuzzy Syst. 2017, 25, 813–824. [Google Scholar] [CrossRef]
- Hu, W.; Liu, L. Cooperative output regulation of heterogeneous linear multi-agent systems by event-triggered control. IEEE Trans. Cybern. 2017, 47, 105–116. [Google Scholar] [CrossRef]
- Ran, G.; Shu, Z.; Lam, H.K.; Liu, J.; Li, C. Dissipative tracking control of nonlinear Markov jump systems with incomplete transition probabilities: A multiple-event-triggered approach. IEEE Trans. Fuzzy Syst. 2023, 31, 2389–2400. [Google Scholar] [CrossRef]
- Cheng, T.; Kan, Z.; Klotz, J.R.; Shea, J.M.; Dixon, W.E. Event-triggered control of multiagent systems for fixed and time-varying network topologies. IEEE Trans. Autom. Control 2017, 62, 5365–5371. [Google Scholar] [CrossRef]
- Wang, J.; Feng, J.; Zhao, Y. Exponentially synchronization of stochastic complex networks with time-varying delays and switching topology via pinning control. In Proceedings of the 2011 Seventh International Conference on Computational Intelligence and Security, Sanya, China, 3–4 December 2011; IEEE: New York, NY, USA, 2011; pp. 263–267. [Google Scholar] [CrossRef]
- Wu, L.; Gao, Y.; Liu, J.; Li, H. Event-triggered sliding mode control of stochastic systems via output feedback. Automatica 2017, 82, 79–92. [Google Scholar] [CrossRef]
- Ma, R.; Shao, X.; Liu, J.; Wu, L. Event-triggered sliding mode control of Markovian jump systems against input saturation. Syst. Control Lett. 2019, 134, 104525. [Google Scholar] [CrossRef]
- Gao, Y.; Sun, X.; Wen, C.; Wang, W. Event-triggered control for stochastic nonlinear systems. Automatica 2018, 95, 534–538. [Google Scholar] [CrossRef]
- Wang, Y.; Zheng, W.X.; Zhang, H. Dynamic event-based control of nonlinear stochastic systems. IEEE Trans. Autom. Control 2017, 62, 6544–6551. [Google Scholar] [CrossRef]
- Luo, S.; Deng, F. On event-triggered control of nonlinear stochastic systems. IEEE Trans. Autom. Control 2020, 65, 369–375. [Google Scholar] [CrossRef]
- Hu, A.; Cao, J. Consensus of multi-agent systems via intermittent event-triggered control. Int. J. Syst. Sci. 2017, 48, 280–287. [Google Scholar] [CrossRef]
- Mao, X. Stochastic Differential Equations and Applications; Woodhead Publishing: Cambridge, UK, 2007. [Google Scholar]
- Wu, Y.; Sun, Z.; Ran, G.; Xue, L. Intermittent control for fixed-time synchronization of coupled networks. IEEE/CAA J. Autom. Sin. 2023, 10, 1488–1490. [Google Scholar] [CrossRef]
- Li, M.Y.; Shuai, Z. Global-stability problem for coupled systems of differential equations on networks. J. Differ. Equ. 2010, 248, 1–20. [Google Scholar] [CrossRef]
- Wu, Y.; Zhu, J.; Li, W. Intermittent discrete observation control for synchronization of stochastic neural networks. IEEE Trans. Cybern. 2020, 50, 2414–2424. [Google Scholar] [CrossRef]
- Ding, D.; Wang, Z.; Shen, B.; Wei, G. Event-triggered consensus control for discrete-time stochastic multi-agent systems: The input-to-state stability in probability. Automatica 2015, 62, 284–291. [Google Scholar] [CrossRef]
- Zhu, Q. Stabilization of stochastic nonlinear delay systems with exogenous disturbances and the event-triggered feedback control. IEEE Trans. Autom. Control 2019, 64, 3764–3771. [Google Scholar] [CrossRef]
- Wang, P.; Zhang, B.; Su, H. Stabilization of stochastic uncertain complex-valued delayed networks via aperiodically intermittent nonlinear control. IEEE Trans. Syst. Man Cybern. Syst. 2019, 49, 649–662. [Google Scholar] [CrossRef]
- Umpierrez, P.; Araña, V.; Sancho, S. Piecewise semi-analytical formulation for the analysis of coupled-oscillator systems. IEEE Trans. Microw. Theory Tech. 2019, 67, 2259–2269. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Matrix Elements | Value |
|---|---|
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, Y.; Bing, J. Stability of Stochastic Coupled Networks with Time-Varying Coupling Under Intermittent Event-Triggered Control. Actuators 2024, 13, 475. https://doi.org/10.3390/act13120475
Wu Y, Bing J. Stability of Stochastic Coupled Networks with Time-Varying Coupling Under Intermittent Event-Triggered Control. Actuators. 2024; 13(12):475. https://doi.org/10.3390/act13120475
Chicago/Turabian StyleWu, Yongbao, and Jiayi Bing. 2024. "Stability of Stochastic Coupled Networks with Time-Varying Coupling Under Intermittent Event-Triggered Control" Actuators 13, no. 12: 475. https://doi.org/10.3390/act13120475
APA StyleWu, Y., & Bing, J. (2024). Stability of Stochastic Coupled Networks with Time-Varying Coupling Under Intermittent Event-Triggered Control. Actuators, 13(12), 475. https://doi.org/10.3390/act13120475