1. Introduction
Industrial robot manipulators have been applied in many manufacturing fields, such as assembly and welding. However, it is still a great challenge to expand robotics applications to high-precision machining processes due to the low accuracy [
1]. Various feedback control methods such as PID control, sliding mode control [
2], and observer-based control [
3] have been adopted to improve the end effector setpoint control precision of industrial robots. However, it is difficult to achieve high-precision control with only feedback controllers owing to the complex nonlinear dynamics of industrial manipulators. Alternatively, model inversion-based feedforward control [
4] is an effective approach that solves the problem by compensating the nonlinear dynamics. A nonlinear PD controller plus feedforward compensation was proposed for rigid robots to achieve the finite-time stabilization of the tracking error [
5]. To improve the robustness-to-payload uncertainty, an intelligent feedforward controller using a neural network and fuzzy logic was designed for a two-link robot manipulator [
6].
Nevertheless, the above feedforward control methods are based on the rigid robot model, which neglects the flexible deformations of manipulators. Actually, the flexibilities of some compliant transmission elements such as harmonic drives and cycloidal gears have significant effects on setpoint control performance [
7]. In response to the problem, the flexible joint model (FJM) was proposed, which models the joint as a linear torsional spring [
8]. Based on the FJM, a feedforward minimum-time position control method was proposed to avoid oscillation of a flexible robot [
9]. Based on comprehensive modeling of the flexible joint and an extended generalized Maxwell friction model, an adaptive feedforward controller was designed to compensate the nonlinear dynamics of transmissions [
10].
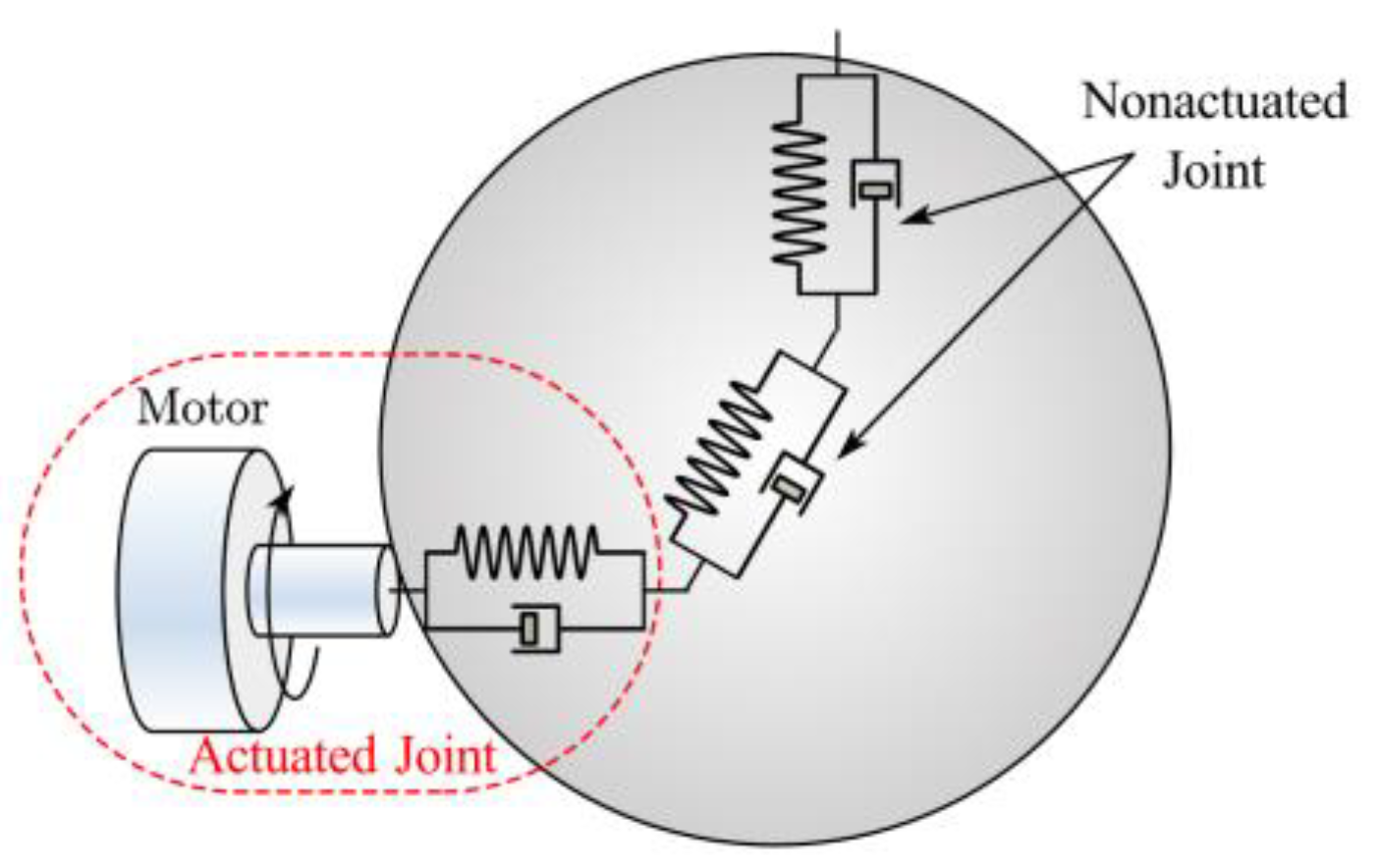
However, only the elasticities in revolute directions are considered in the FJM, which neglects the elasticities out of the rotational plane. In practice, modern industrial manipulators tend to have a slender design and lightweight materials. As a result, the flexible deformations out of the rotational plane caused by links and bearings are unneglectable, especially for high-speed and heavy-load manipulators [
11]. Hence, the flexible joint model can not accurately describe a modern industrial robot. To improve the model accuracy, an extended flexible joint model (EFJM) was proposed [
12] which can describe not only the elasticities in rotational planes but also the elastic deformations out of the plane. Then, the EFJM was validated on a modern industrial manipulator, and the results showed that the EFJM can greatly improve the model accuracy [
13]. Thus, feedforward control based on the EFJM is a prospective way to improve the control precisions of flexible industrial manipulators.
Nevertheless, the EFJM possesses a differential nonflat characteristic, which is a great challenge for the feedforward controller design [
14]. The feedforward control problem of a minimum-phase EFJM was solved by using differential algebraic equation (DAE) theory; thus, the tracking performance was improved significantly [
12]. However, the EFJM is minimum phase only in special configuration. In most cases, the EFJM is a nonminimum-phase system [
15]. A nonminimum-phase system possesses unstable internal dynamics; thus, the traditional feedforward control method cannot give a bounded solution [
16]. To obtain a bounded feedforward input, a continuous DAE optimization solver and a discretized DAE optimization solver were proposed to solve the feedforward control problem of an EFJM with three degrees of freedom (DOFs) [
17].
However, numerical optimization was adopted in the above methods due to the limitation of being nonminimum phase. Consequently, the existing methods have a heavy burden of calculation which is unacceptable for industrial robots with high DOFs. Moreover, the above methods are all based on analytic dynamic equations, which are difficult to obtain for complex manipulators. Thus, a high-precision feedforward control method with reasonable computational burden for general complex flexible industrial manipulators should be further explored.
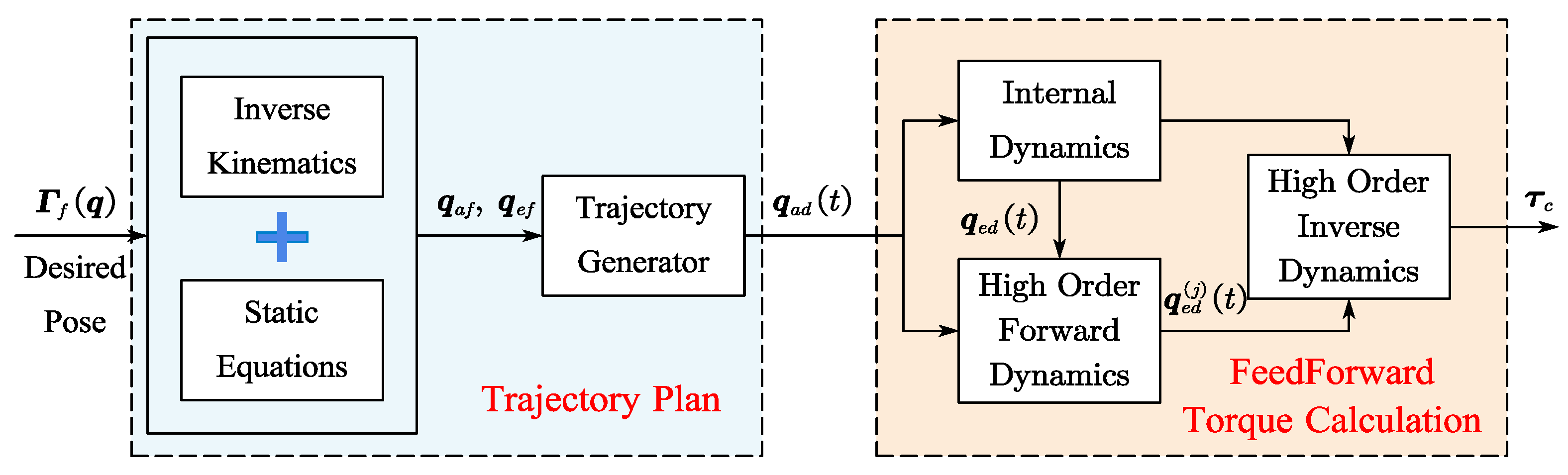
To improve the setpoint control precision and reduce the computational burden, a new feedforward control approach based on the output redefinition of the EFJM is proposed for flexible industrial robots in this paper. Firstly, the output of the EFJM is redefined to transform the EFJM into a minimum-phase system. Thus, the limitation of the unstable internal dynamics is eliminated. Secondly, the joint trajectory is planned based on the kinematics and statics equations of the EFJM. Thus, the pose error caused by elasticity is compensated, and the setpoint problem is transformed into joint space. Finally, a universal feedforward torque computation algorithm for the EFJM is designed to reduce the calculation burden. The simulation and experimental studies demonstrate that the proposed method improves the control precision and computational efficiency remarkably.
The rest of this paper is organized as follows. In
Section 2, the EFJM is introduced, and the setpoint control problem is formulated. The feedforward control method is proposed in
Section 3. In
Section 4, simulations and experiments are implemented. The conclusion is given in
Section 5.
3. Controller Design
To achieve high-precision setpoint control of the end effector, an output-redefinition-based feedforward control method is proposed for the EFJM in this section.
Firstly, it is proven through Lyapunov theorem that the EFJM is transformed into a minimum-phase system by redefining the system output as . Secondly, the reference trajectory is planned in joint space based on the kinematics and static equation of the EFJM. Thus, the pose error caused by the flexibility deformations is compensated accurately. Finally, the feedforward control torque for the EFJM is calculated by using the recursive dynamics algorithms; thus, the computational burden is further reduced.
3.1. Output Redefinition of EFJM
As mentioned above, from motor torque to end effector pose , the EFJM is nonminimum phase in most cases. Consequently, an unbounded solution of internal dynamics may be obtained, leading to unbounded feedforward torques. To stabilize the internal dynamics and overcome the limitation of being nonminimum phase, the system output is redefined as in this section. Then, the stability of internal dynamics is analyzed.
Differentiating the first equation of (5) twice yields:
where
.
Neglect the damping of actuated joints
and consider the motor dynamics (2); then, the input output relationship of the EFJM is obtained.
where
is the system input.
Clearly, the dynamics of the unactuated joints coordinates are the internal dynamics of the EFJM.
Let the output
and
; then, the zero dynamics of the EFJM are obtained as:
We can conclude from Assumption 2 [
7] that system (13) has an equilibrium
, which satisfies:
The Lyapunov candidate function is chosen as:
where
denotes an energy-like function which is defined as:
where
means the gravitational potential energy of robot which satisfies:
Obviously,
is the stationary point of function, as the partial derivative of
w.r.t
is:
Taking the partial derivative of (18) with respect to
again yields:
According to Property 3 and the assumption , the right side of (19) is positive definite. Hence, is the global minimum point for . Then, we obtain , , and .
The time derivative of
is:
According to (12) and (14), we obtain:
Recalling Property 2 yields:
According to Assumption 1, is negative semi-definite if and only if . What is more, the function is a radially unbounded positive semi-definite function. We can conclude from the Krasovskii theorem that the equilibrium is globally asymptotically stable. Thus, the original unstable internal dynamics are transformed into new, stable internal dynamics by choosing actuated joint position vector as system out. The limitation of the nonminimum-phase EFJM can be avoided.
3.2. Trajectory Planning in Joint Space
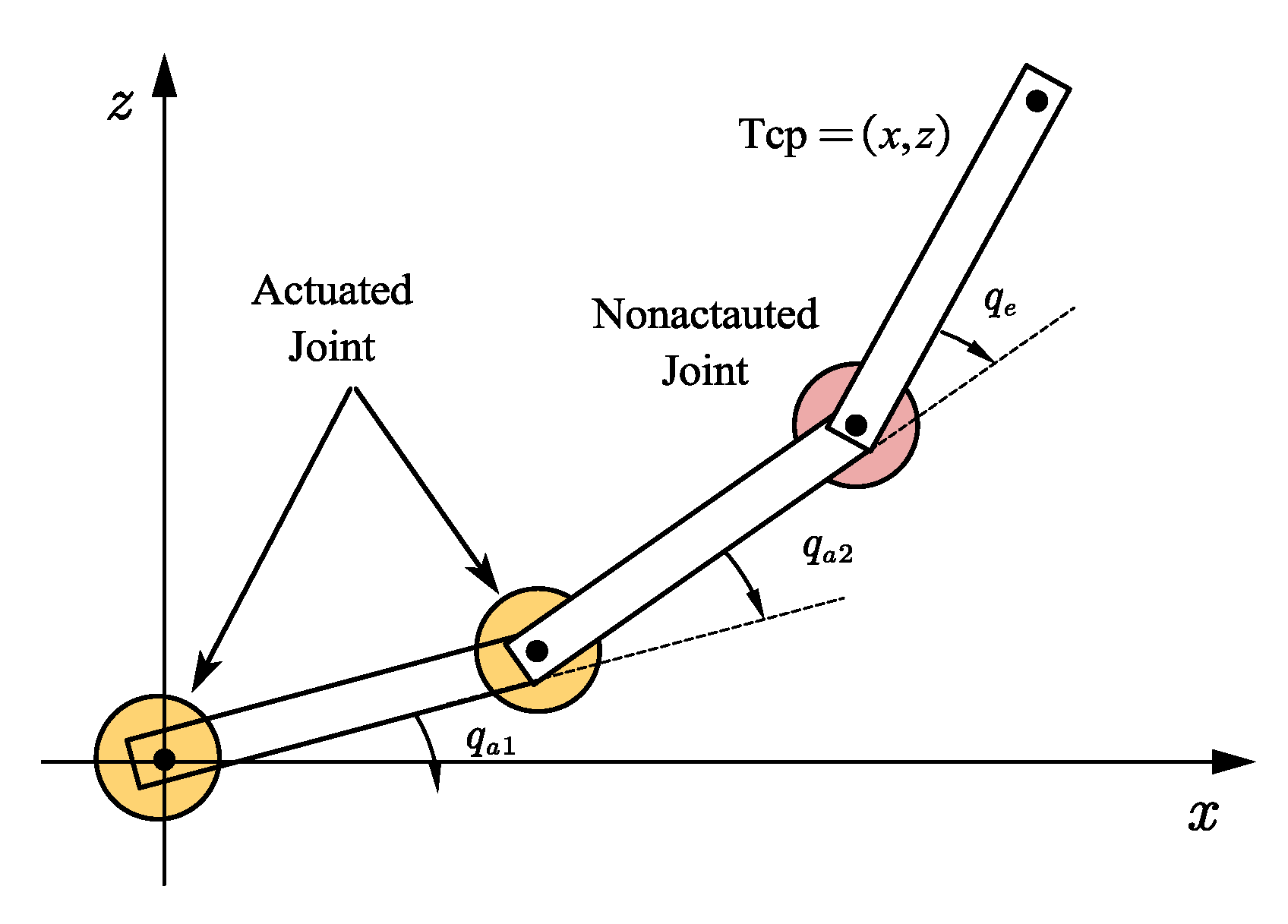
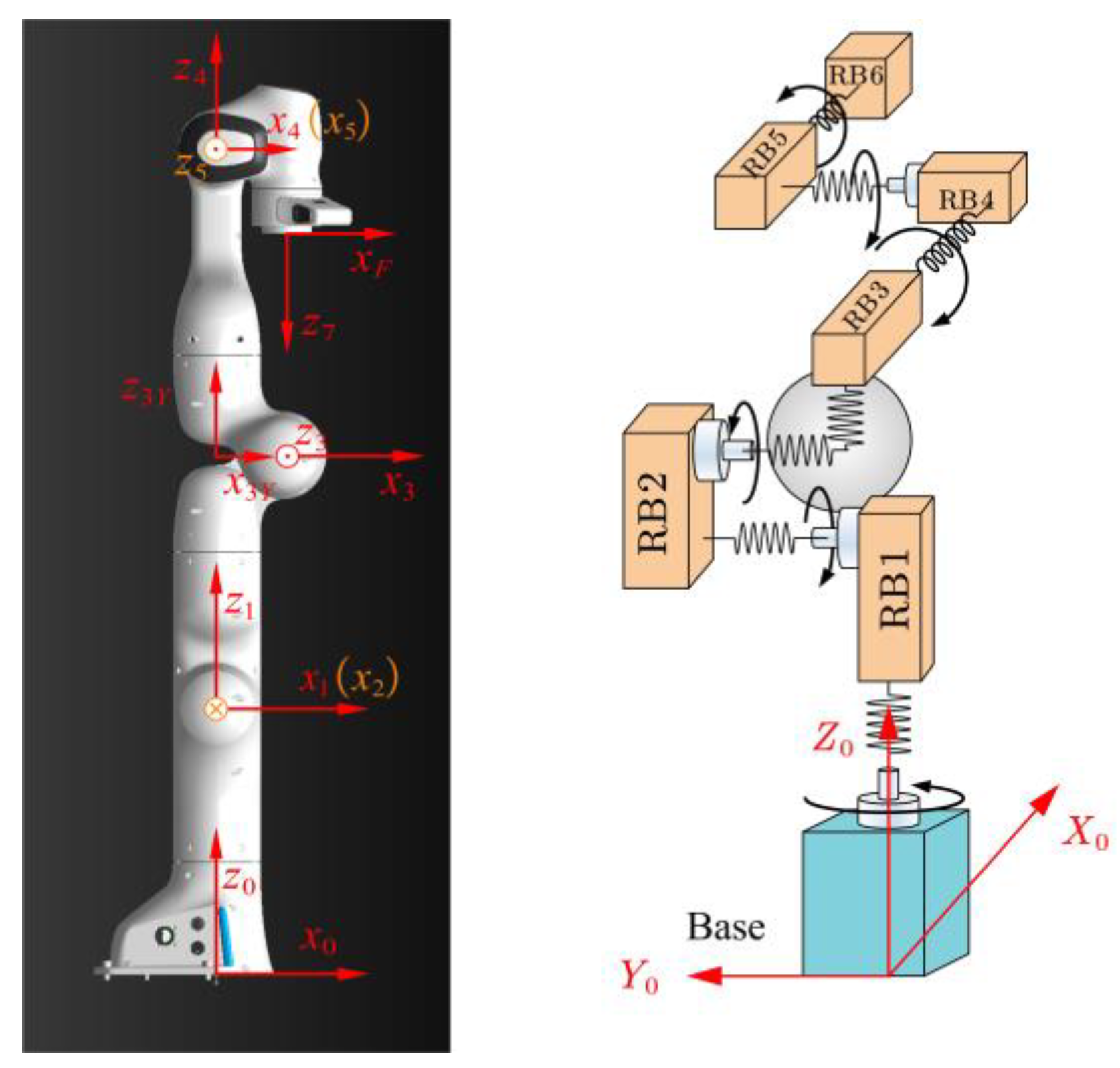
It is obvious that the flexible deformations of unactuated joints lead to a pose error of the end effector; thus, the inverse kinematics problem of the extended flexible joint model should first be studied in trajectory planning. For convenience, assume that the robot is a six-DOFs serial joint robot manipulator and away from the singularity. Obviously, the dimension of
is larger than six; thus, the kinematic relation (9) of the EFJM is noninvertible. In order to obtain a unique solution, additional constraints on unactuated joints should be considered. In a static condition, the unactuated joint positions are determined by gravity torque; thus, the following equations should be satisfied:
The desired joint positions and can be obtained by solving the above nonlinear algebraic equations with a numerical solver which requires an initial guess. Considering the elastic deformations in nonactuated directions are small, the solution of the inverse kinematics of the rigid model can be chosen as the initial guess.
Based on the initial configuration
and desired configuration
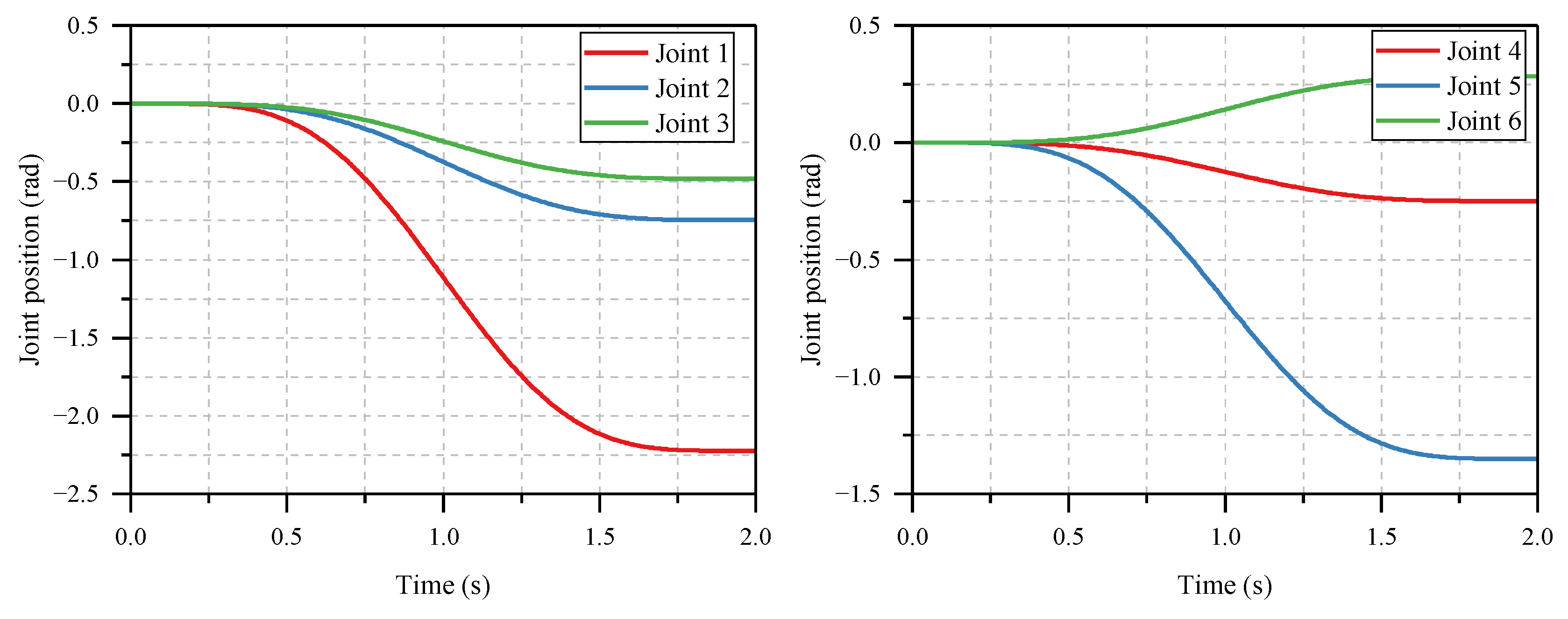
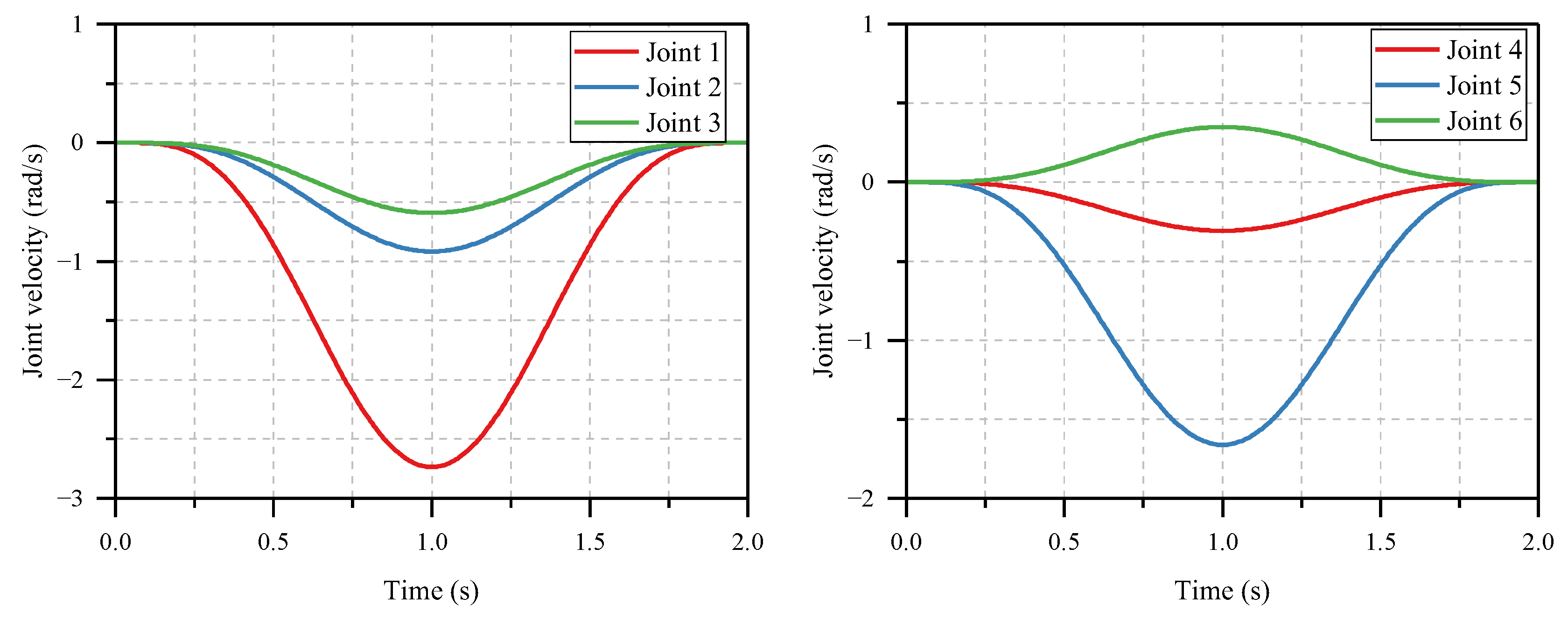
, the joint position reference trajectories
and its derivatives
can be planned in joint space by adopting a trajectory planning algorithm with continuous jerk profile.
Through the accurate trajectory tracking of , the end effector accomplishes the desired point-to-point motion. Thus, the setpoint control problem is transformed to the trajectory tracking problem in joint space.
3.3. Calculation of Feedforward Torque
According to (2) and (3), the feedforward torque can be obtained as:
The elastic torque vector in actuated direction
and its derivatives
and
can be expressed as:
where
. The above equations can be calculated efficiently by using the recursive Newton–Euler algorithm (RNEA) [
18] and elastic joint Newton–Euler algorithm (EJNEA) [
19], respectively.
where
,
,
,
, and
, and EJNEA
3 means the reduced version of the EJNEA, returning
.
Note that the nonactuated joint angular positions , velocities , accelerations , jerks , and snaps are required. Since the stability of zero dynamics is ensured, and can be obtained by solving the internal dynamics (12) using numerical integration solvers based on initial condition .
Then,
can be obtained efficiently by solving the following linear equations:
where
,
, and
.
and
are obtained using the composite rigid body algorithm (CRBA) [
20]. Let
; then,
can be obtained through adopting the RNEA.
Similarly,
and
can be obtained by solving the following equations:
where
. The nonlinear terms
and
are calculated by adopting the
and
as follows:
According to (3), the motor position
and velocity
are derived as:
By now, all required variables in (25) are known; thus, the feedforward torque calculation is completed, and the total procedure is summarized as follows:
Step 1. Solve the internal dynamics (12) using an ODE solver to obtain ;
Step 2. Compute matrices using the ;
Step 3. Compute using the RNEA and solve (32) to obtain ;
Step 4. Compute using the and solve (34) to obtain ;
Step 5. Compute using the and solve (35) to obtain ;
Step 6. Compute , , and using the , , and , respectively;
Step 7. Compute and using (38) and (39);
Step 8. Compute feedforward torque using (25).
Remark 1. The elastic deformations in nonactuated directions are compensated by solving (23), while the elasticities in actuated directions are compensated in the feedforward torque calculation algorithm. Thus, the proposed method can further improve the control precision.
Remark 2. It is time consuming to solve the internal dynamics (12) through numerical integration. However, the traditional stable inversion methods [17] are based on numerical optimization which needs to solve the internal dynamics repetitively. In contrast, the internal dynamics need to be solved only once in the proposed calculation algorithm since the EFJM is transformed into a minimum-phase system. Thus, the computational burden is remarkably reduced.
Remark 3. The proposed calculation algorithm does not require the analytic expression of the robot; thus, it can be applied to general open-chain robots easily.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}