
Effects of Stimulus Frequency and Location on Vibrotactile Discrimination Performance Using Voice Coil Actuators on the Forearm



Abstract
1. Introduction
2. Experiment
2.1. General Experiment Setup
2.2. Actuators
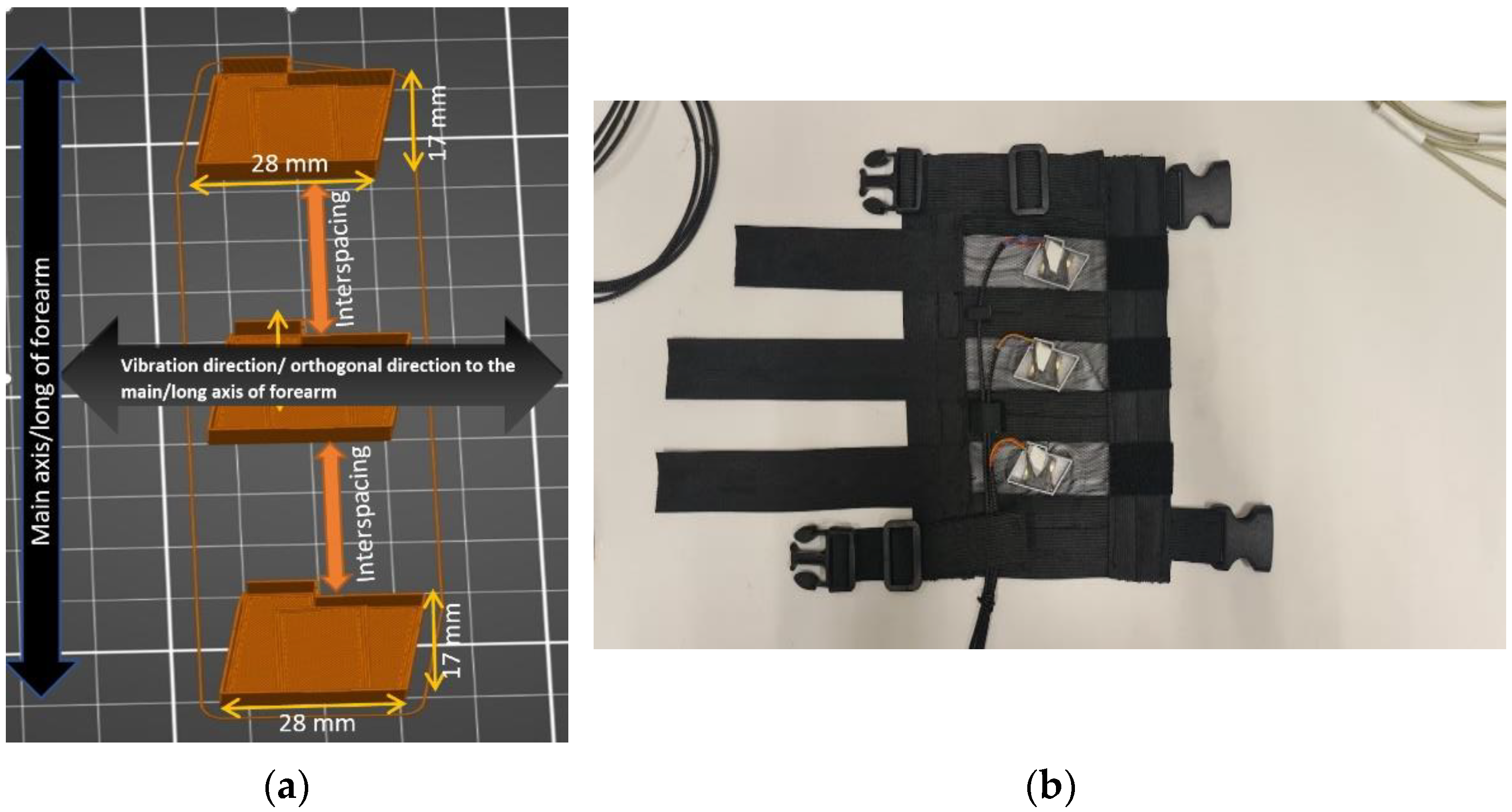
2.3. Vibrotactile Sleeve
2.4. Participants
2.5. Procedure
3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Ævarsson, E.A.; Ásgeirsdóttir, T.; Pind, F.; Kristjánsson, Á.; Unnthorsson, R. Vibrotactile Threshold Measurements at the Wrist Using Parallel Vibration Actuators. ACM Trans. Appl. Percept. 2022, 19, 1–11. [Google Scholar] [CrossRef]
- Tan, H.Z.; Durlach, N.I.; Reed, C.M.; Rabinowitz, W.M. Information Transmission with a Multi-Finger Tactual Display. Percept. Psychophys. 1999, 61, 993–1008. [Google Scholar] [CrossRef]
- van Erp, J.B.F.; van Veen, A.H.C. Vibro-tactile information presentation in automobiles. In Proceedings of the Eurohaptic, Birmingham, UK, 1–4 July 2001. [Google Scholar]
- Bach-y-Rita, P. Tactile vision substitution—Past and future. Int. J. Neurosci. 1983, 19, 29–36. [Google Scholar] [CrossRef]
- van Erp, J.B.; Verschoor, M.H. Cross-modal visual and vibrotactile tracking. Appl. Ergon. 2004, 35, 105–112. [Google Scholar] [CrossRef]
- Luo, X.A.; Hayes, L. Vibrotactile Stimulation Based on the Fundamental Frequency Can Improve Melodic Contour Identification of Normal-Hearing Listeners With a 4-Channel Cochlear Implant Simulation. Front. Neurosci. 2019, 13, 1145. [Google Scholar] [CrossRef] [PubMed]
- Lofelt GmbH Datasheet L5 Voice Coil Actuator, Revision 1.4; Lofelt GmbH: Berlin, Germany, 2019.
- Hyunho, K.; Changhoon, S.; Junhun, L.; Ryu, J.; Si-bok, Y.; Sooyoung, L. Vibrotactile Display for Driving Safety Information. In Proceedings of the 2006 IEEE Intelligent Transportation Systems Conference, Toronto, ON, Canada, 17–20 September 2006. [Google Scholar]
- Hassanian, R.; Riedel, M.; Yeganeh, N. Numerical Investigation on Acceleration. Open Access Libr. J. 2022, 9, 1–7. [Google Scholar]
- Fontana, J.M.; O’Brien, R.; Laciar, E.; Maglione, L.S.; Molisani, L. Vibrotactile Stimulation in the Upper-Arm for Restoring Individual Finger Sensations in Hand Prosthesis. J. Med. Biol. Eng. 2018, 38, 782–789. [Google Scholar] [CrossRef]
- Salzer, Y.; Oron-Gilad, T.; Ronen, A.; Parmet, Y. Vibrotactile “on-thigh” alerting system in the cockpit. J. Hum. Factors Ergon. Soc. 2011, 53, 118–131. [Google Scholar] [CrossRef]
- Hoffmann, R.; Spagnol, S.; Kristjánsson, Á.; Unnthorsson, R. Evaluation of an Audio-haptic Sensory Substitution Device for Enhancing Spatial Awareness for the Visually Impaired. Optom. Vis. Sci. 2018, 95, 757–765. [Google Scholar] [CrossRef]
- Czopek, D.; Wiciak, J. Vibrotactile frequency discrimination on the wrist of visually impaired people. J. Vibroeng. 2019, 21, 2242–2249. [Google Scholar] [CrossRef]
- Tan, H.Z.; Charlotte, M.R.; Jiao, Y.; Perez, Z.D.; Wilson, E.C.; Jung, M.J.; Severgnini, F.M. Acquisition of 500 English Words through a Tactile Phonemic Sleeve (TAPS). IEEE Trans. Haptics 2020, 13, 745–760. [Google Scholar] [CrossRef]
- Wong, E.Y.; Israr, A.; O’Malley, M.K. Discrimination of consonant articulation location by tactile stimulation of the forearm. In Proceedings of the 2010 IEEE Haptics Symposium, Waltham, MA, USA, 25–26 March 2010. [Google Scholar]
- Yeganeh, N.; Makarov, I.; Thors, S.S.S.; Ásgeirsson, H.; Kristjánsson, Á.; Unnthorsson, R. Vibrotactile sleeve to improve music enjoyment of cochlear implant users. In Proceedings of the ASME 2022 International Mechanical Engineering Congress and Exposition, Columbus, OH, USA, 30 October–3 November 2022. [Google Scholar]
- Yeganeh, N.; Makarov, I.; Thors, S.S.S.; Kristjánsson, Á.; Unnthorsson, R. Evaluating the Optimum Distance between Voice Coil Actuators Using the Relative Point Localization Method on the Forearm. Actuators 2023, 12, 6. [Google Scholar] [CrossRef]
- Winberg, M.; Johansson, S.; Claesson, I. Inertial mass actuators, understanding and tuning. In Proceedings of the 11th International Congress on Sound and Vibration ICSV11, St. Petersburg, Russia, 5–8 July 2004. [Google Scholar]
- Guemann, M.; Bouvier, S.; Halgand, C.; Paclet, F.; Borrini, L.; Ricard, D.; Lapeyre, E.; Cattaert, D.; Rugy, A.D. Effect of vibration characteristics and vibror arrangement on the tactile perception of the upper arm in healthy subjects and upper limb amputees. J. Neuroeng. Rehabil. 2019, 16, 138. [Google Scholar] [CrossRef]
- Zhao, S.; Israr, A.; Lau, F.; Abnousi, F. Coding tactile symbols for phonemic communication. In Proceedings of the 2018 CHI Conference on Human Factors in Computing Systems, New York, NY, USA, 21–26 April 2018. [Google Scholar]
- Dunkelberger, N.; Sullivan, J.L.; Bradley, J.; Manickam, I.; Dasarathy, G.; Baraniuk, R.; O’Malley, M.K. A multisensory approach to present phonemes as language through a wearable haptic device. IEEE Trans. Haptics 2021, 14, 188–199. [Google Scholar] [CrossRef] [PubMed]
- Simon, M.; Meyerhoff, H.S.; Charles, S.; Christian, F. Implied tactile motion: Localizing dynamic stimulations on the skin. Atten. Percept. Psychophys. 2019, 81, 794–808. [Google Scholar]
- Weber, E.H. The Sense of Touch; Academic Press for Experimental Psychology Society: New York, NY, USA, 1978; p. 278. [Google Scholar]
- Jones, L.A. Chapter 8—Tactile Communication Systems: Optimizing the Display of Information. In Enhancing Performance for Action and Perception; Lepore, F., Green, A., Chapman, C.E., Kalaska, J.F., Eds.; Elsevier: Amsterdam, The Netherlands, 2011; Volume 192, pp. 113–128. [Google Scholar]
- Katherine, S.; Lynette, J. Mechanical and Psychophysical Studies of Surface Wave Propagation during Vibrotactile Stimulation. IEEE Trans. Haptics 2013, 6, 320–329. [Google Scholar]
- Weinstein, S. Intensive and Extensive Aspects of Tactile Sensitivity as a Function of Body Part, Sex, and Laterality. In The Skin Senses; Kenshalo, D.R., Ed.; Charles C. Thomas: Springfield, IL, USA, 1968; pp. 195–222. [Google Scholar]
- Cholewiak, R.W.; Collins, A.A. Vibrotactile localization on the arm: Effects of place, space, and age. Percept. Psychophys. 2003, 65, 1058–1077. [Google Scholar] [CrossRef] [PubMed]
- Gibson, G.O.; Craig, J.C. Tactile spatial sensitivity and anisotropy. Percept. Psychophys. 2005, 67, 1061–1079. [Google Scholar] [CrossRef] [PubMed]
- Boring, E. Sensation and Perception in the History of Experimental Psychology; Appleton-Century: New York, NY, USA, 1942. [Google Scholar]
- Cody, F.; Garside, R.; Lloyd, D.; Poliakoff, E. Tactile spatial acuity varies with site and axis in the human upper limb. Neurosci. Lett. 2008, 433, 103–108. [Google Scholar] [CrossRef]
- Tompson, J.; Goroshin, R.; Jain, A.; LeCun, Y.; Bregler, C. Efficient Object Localization Using Convolutional Networks. arXiv 2014, arXiv:1411.4280. [Google Scholar]
- Oakley, I.; Kim, Y.; Lee, J.; Ryu, J. Determining the Feasibility of Forearm Mounted Vibrotactile Displays. In Proceedings of the 2006 14th Symposium on Haptic Interfaces for Virtual Environment and Teleoperator Systems, Alexandria, VA, USA, 25–26 March 2006. [Google Scholar]
- Mahns, D.A.; Perkins, N.M.; Sahai, V.; Robinson, L.; Rowe, M.J. Vibrotactile Frequency Discrimination in Human Hairy Skin. J. Neurophysiol. 2006, 95, 1442–1450. [Google Scholar] [CrossRef] [PubMed]
- Morioka, M.; Whitehouse, D.J.; Griffin, M.J. Vibrotactile thresholds at the fingertip, volar forearm, large toe, and heel. Somatosens. Mot. Res. 2008, 25, 101–112. [Google Scholar] [CrossRef]
- Evagoras, X.; Banu, A.; Nurgeldy, P. Audio tactile integration in the Pacinian corpuscle’s maximum sensitivity frequency range. Atten. Percept. Psychophys. 2020, 82, 3250–3257. [Google Scholar] [CrossRef] [PubMed]
- Shah, V.A.; Casadio, M.; Scheidt, R.A.; Mrotek, L.A. Spatial and Temporal Influences on Discrimination of Vibrotactile Stimuli on The Arm. Exp. Brain Res. 2019, 237, 2075–2086. [Google Scholar] [CrossRef] [PubMed]
- Kristjánsson, Á.; Moldoveanu, A.; Jóhannesson, Ó.I.; Balan, O.; Spagnol, S.; Valgeirsdóttir, V.V.; Unnthorsson, R. Designing sensory-substitution devices: Principles, pitfalls and potential1. Restor. Neurol. Neurosci. 2016, 34, 769–787. [Google Scholar] [CrossRef]
- Wang, D.; Peng, C.; Afzal, N.; Li, W.; Wu, D.; Zhang, Y. Localization performance of multiple vibrotactile cues on both arms. IEEE Trans. Haptics 2018, 11, 97–106. [Google Scholar] [CrossRef] [PubMed]
- Sahai, V.; Mahns, D.A.; Perkins, N.M.; Robinson, L.; Rowe, M.J. Vibrotactile coding capacities of spinocervical tract neurons in the cat. J. Neurophysiol. 2006, 95, 1465–1477. [Google Scholar] [CrossRef]
- Post, L.; Zompa, I.; Chapman, C. Perception of vibrotactile stimuli during motor activity in human subjects. Exp. Brain Res. 1994, 100, 107–120. [Google Scholar] [CrossRef]
- Solomonow, M.; Lyman, J.; Freedy, A. Electro tactile two-point discrimination as a function of frequency, body site, laterality, and stimulation codes. Ann. Biomed. Eng. 1977, 5, 47–60. [Google Scholar] [CrossRef]
- Hoffmann, R.; Valgeirsdóttir, V.V.; Jóhannesson, Ó.I.U.; Kristjánsson, Á. Measuring relative vibrotactile spatial acuity: Effects of tactor type, anchor points and tactile anisotropy. Exp. Brain Res. 2018, 236, 3405–3416. [Google Scholar] [CrossRef]
- Hoffmann, R.L.B.A.; Unnthorsson, R.; Kristjánsson, Á. The intensity order illusion: Temporal order of different vibrotactile intensity causes systematic localization errors. J. Neurophysiol. 2019, 122, 1810–1820. [Google Scholar] [CrossRef] [PubMed]
- Jóhannesson, Ó.I.; Hoffmann, R.; Valgeirsdóttir, V.V.U.; Moldoveanu, A.; Kristjánsson, Á. Relative vibrotactile spatial acuity of the torso. Exp. Brain Res. 2017, 235, 3505–3515. [Google Scholar] [CrossRef] [PubMed]
- RME. “MADIfaceXT”, user’s guide, 2016, version 1.4 a New Haptic Neuroprosthetic. Sci. Rep. 2020, 10, 1. [Google Scholar]
- Imaizumi, A.; Okamoto, S.; Yamada, Y. Friction perception resulting from laterally vibrotactile stimuli. Robomech J. 2017, 4, 1–13. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Frequency (Hz) | Acceleration (g) |
|---|---|
| 100 | 9.6 |
| 150 | 7.6 |
| 200 | 6.9 |
| 250 | 6.7 |
| Participant | Gender | Length of Forearm (cm) |
|---|---|---|
| 1 | Female | 21.04 |
| 2 | Female | 22 |
| 3 | Female | 22.5 |
| 4 | Female | 21.8 |
| 5 | Male | 23.8 |
| 6 | Male | 24.03 |
| 7 | Male | 24 |
| 8 | Male | 25 |
| Maximal voltage | 1.4 Vrms at f0 |
| Resonance frequency (f0) | 65 Hz ± 5% |
| Frequency range | Min. 0.5 G over 35 Hz to 1 kHz |
| Nominal impedance | 8 Ω at f0 |
| Power handling | Maximum: 320 mW |
| Current consumption | Average at medium volume: 10 mA, bass music use-case Average at maximum volume: 57 mA, bass music use-case |
| Rise/stop times, 30 g attached mass, no DSP | 5 ms/20 ms @ 150 Hz 12 ms/30 ms @ 100 Hz 15 ms/61 ms @ f0 18 ms/50 ms @ 50 Hz |
| Groups Locations of Presenting the First and Second Stimulus | Displacement between Middle and Elbow | Middle/Middle | Displacement between Middle and Wrist | Wrist/Wrist |
|---|---|---|---|---|
| Elbow–Elbow | * 1.761 × 10−5 | * 7.748 × 10−5 | * 0.0001 | 0.358 |
| Displacement between middle and elbow | 0.033 | 0.0408 | * 7.204 × 10−5 | |
| Middle–Middle | 0.462 | * 2.406 × 10−5 | ||
| Displacement between middle and wrist | * 2.392 × 10−5 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yeganeh, N.; Makarov, I.; Unnthorsson, R.; Kristjánsson, Á. Effects of Stimulus Frequency and Location on Vibrotactile Discrimination Performance Using Voice Coil Actuators on the Forearm. Actuators 2023, 12, 224. https://doi.org/10.3390/act12060224
Yeganeh N, Makarov I, Unnthorsson R, Kristjánsson Á. Effects of Stimulus Frequency and Location on Vibrotactile Discrimination Performance Using Voice Coil Actuators on the Forearm. Actuators. 2023; 12(6):224. https://doi.org/10.3390/act12060224
Chicago/Turabian StyleYeganeh, Nashmin, Ivan Makarov, Runar Unnthorsson, and Árni Kristjánsson. 2023. "Effects of Stimulus Frequency and Location on Vibrotactile Discrimination Performance Using Voice Coil Actuators on the Forearm" Actuators 12, no. 6: 224. https://doi.org/10.3390/act12060224
APA StyleYeganeh, N., Makarov, I., Unnthorsson, R., & Kristjánsson, Á. (2023). Effects of Stimulus Frequency and Location on Vibrotactile Discrimination Performance Using Voice Coil Actuators on the Forearm. Actuators, 12(6), 224. https://doi.org/10.3390/act12060224