1. Introduction
Digital hydraulic systems, which apply a number of fast-switching valves switching at high frequencies [
1,
2,
3,
4,
5,
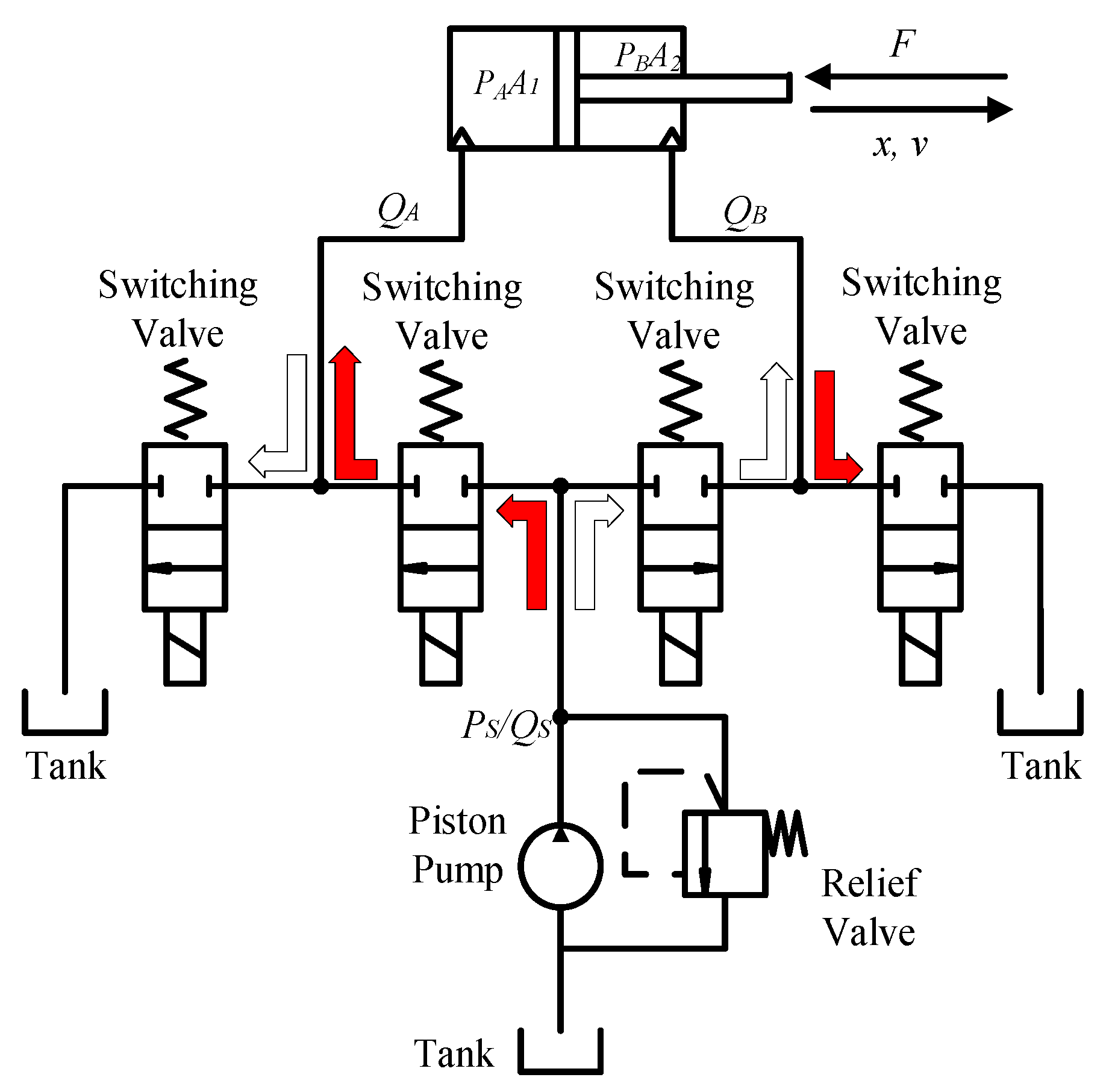
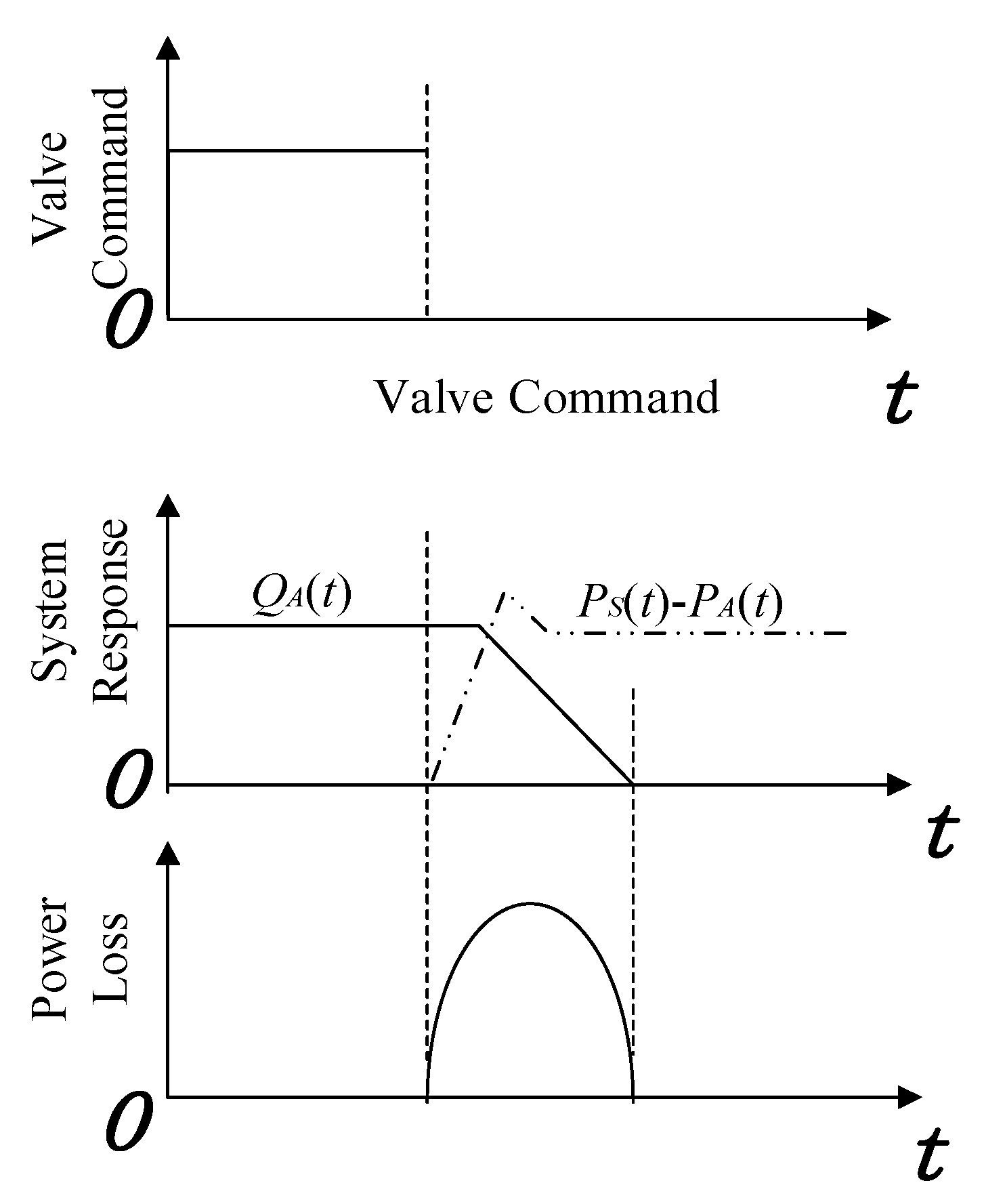
6], show higher theoretical efficiency and better controllability than traditional servo/proportional ones. In principle, applying fast switching valves in digital hydraulic systems could efficiently avoid energy consumptions that go over the valves. However, the response time of physical valves can only achieve between 1–2 ms; during a switching-off process, a certain switching power loss will be generated, since a pressure difference and flowrate exist before the valve is completely switched off. Moreover, when the valve is suddenly switched off, the fluid with a large kinetic energy will generate large pressure pulses, which lead to vibrations and noises and make the system less efficient and accurate [
7].
In recent years, many works in digital hydraulics have been conducted to improve system efficiency and eliminate pressure pulses [
8,
9,
10,
11,
12]. For example, the Fibonacci coding method is proposed to ease the pressure pulses by decreasing the quantity of digital valves switching at the same time compared to binary coding in a PCM method [
8]. A flatness-based controller is designed for the Hydraulic Buck Converter (HBC), which aims to attenuate pressure ripples and oscillatory response [
9]. In addition, Johnston et al. proposed some analytical models for a switched inertance hydraulic system in a four-port high-speed switching valve configuration [
10,
11,
12]. These models provide promising ways to understand the characteristics of a four-port hydraulic system that includes a flowrate/pressure response. With these models, they analyzed the performance of a flow booster with a high-speed rotary valve, which is designed to minimum the pressure/flow loss through the valve orifice. They also proposed an active method for pressure pulsation cancellation by superimposing an anti-phase control signal. In [
13] Y. Alexander C. and V. James D. proposed a soft-switching method in a switched inertance hydraulic circuit. In the proposed method, the flow that would otherwise be throttled across the transitioning valve is stored in a capacitive element and bypassed through check valves in parallel with the switching valves. This method aims to reduce the switching power loss caused by the overlap of the directional valves. In [
14], a monotube was applied to absorb pressure shock.
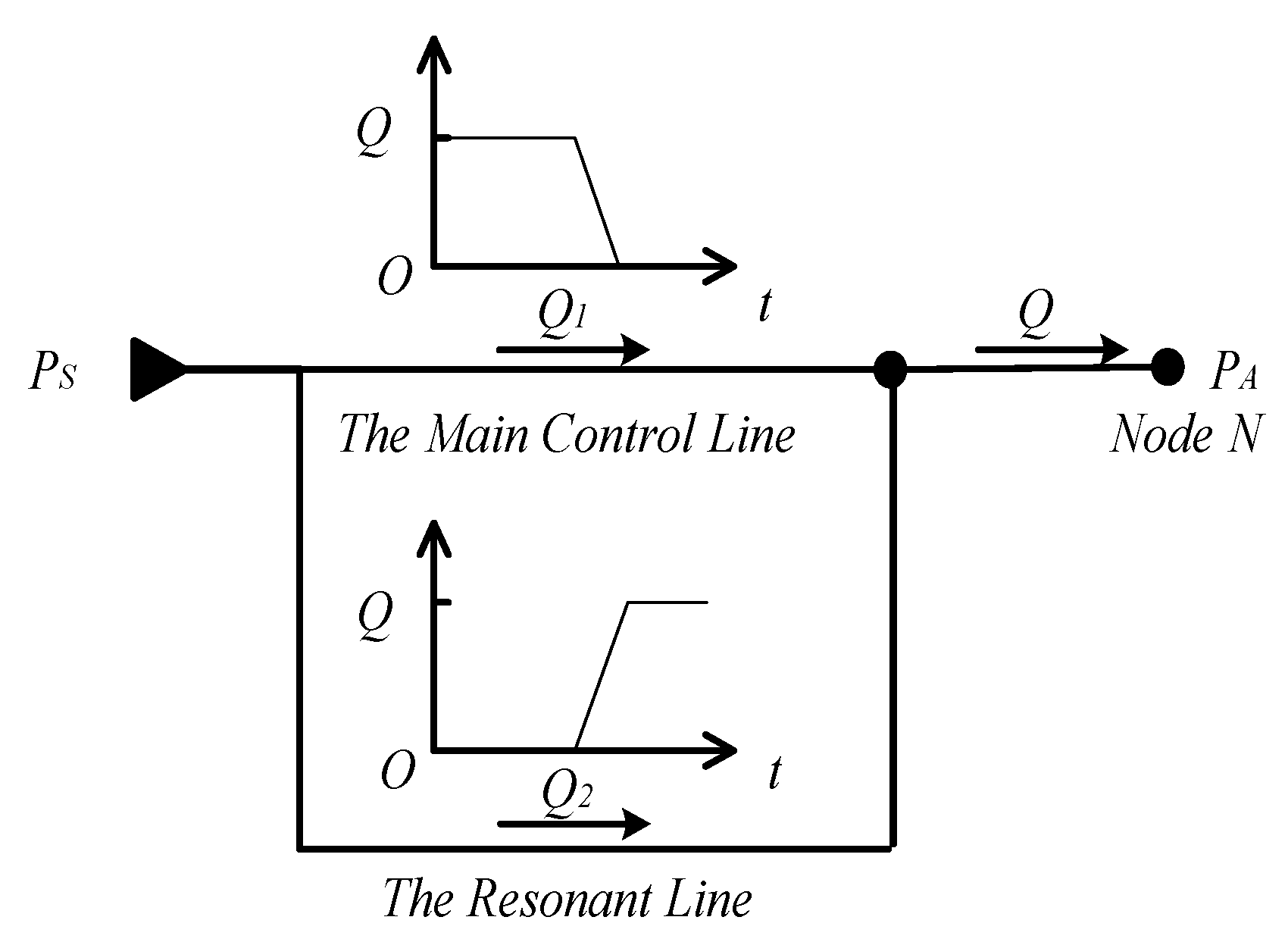
The nature of control valves is to throttle flowrate and yield pressure pulses. All the research above was to passively improve system efficiency, while none of the studies focused on the reason for pressure pulses and energy consumption. In [
15], we firstly proposed the concept of the Zero-Flowrate-Switching controller, which reduces energy loss by reducing the flowrate of the switcher to zero when it is time to shut off the switcher. In this way, it is possible to greatly depress pressure pulses and ultimately reduce energy consumption. The ZFS control method for hydraulic applications is inspired by electronic soft-switching techniques [
16,
17,
18,
19]. A resonant line is based on a RLC oscillator and assisted by other potential lines to achieve the purpose. A theoretical framework of a ZFS controller for a basic one-direction actuation system was mathematically modeled. In [
15], the frequency and amplitude of the supply pressure were assumed as 50 Hz and 1 bar to validate the feasibility of the ZFS controller in a simple one-direction hydraulic line; however, there is a key problem in the application of the ZFS controller: a ZFS controller needs an AC supplier while the DC source is employed in hydraulic systems. To solve this problem, the authors figured out a new measuring method—the fiber brag measuring method—to measure the output pressures of an actual pump (Hydroleduc W12) [
20,
21]. In the following publication [
22], we validated the feasibility of the output pressure waves of the actual pump as the supplier of a ZFS controller, and the result was positive. Additionally, we analyzed the characteristics of this ZFS controller in a double-direction hydraulic line. The results presented a 14.7% switching power loss compared to that of a Hard-Switching (HS) control system in a double-direction hydraulic system.
However, the characteristics of hydraulic systems are different from that of electronic counterparts. The performance is complex in the valve start-up process [
23]. Many hydraulic problems should be resolved before a real hydraulic ZFS model is developed. Linear hydraulic components such as the inductance/capacitance should be investigated in a RLC resonator; unexpected hydraulic capacitance needs to be properly considered, since dynamic load forces have an impact on pressure/flowrate response and system capacitance. In this paper, a dynamic ZFS control method for a 4-port hydraulic system is proposed. In the dynamic ZFS controller presented in this paper, dynamic load forces are applied in the model; in the meantime, the impact of the dynamic load forces on the cylinder chamber pressures/flowrates and system capacitance is also considered in this advanced model.
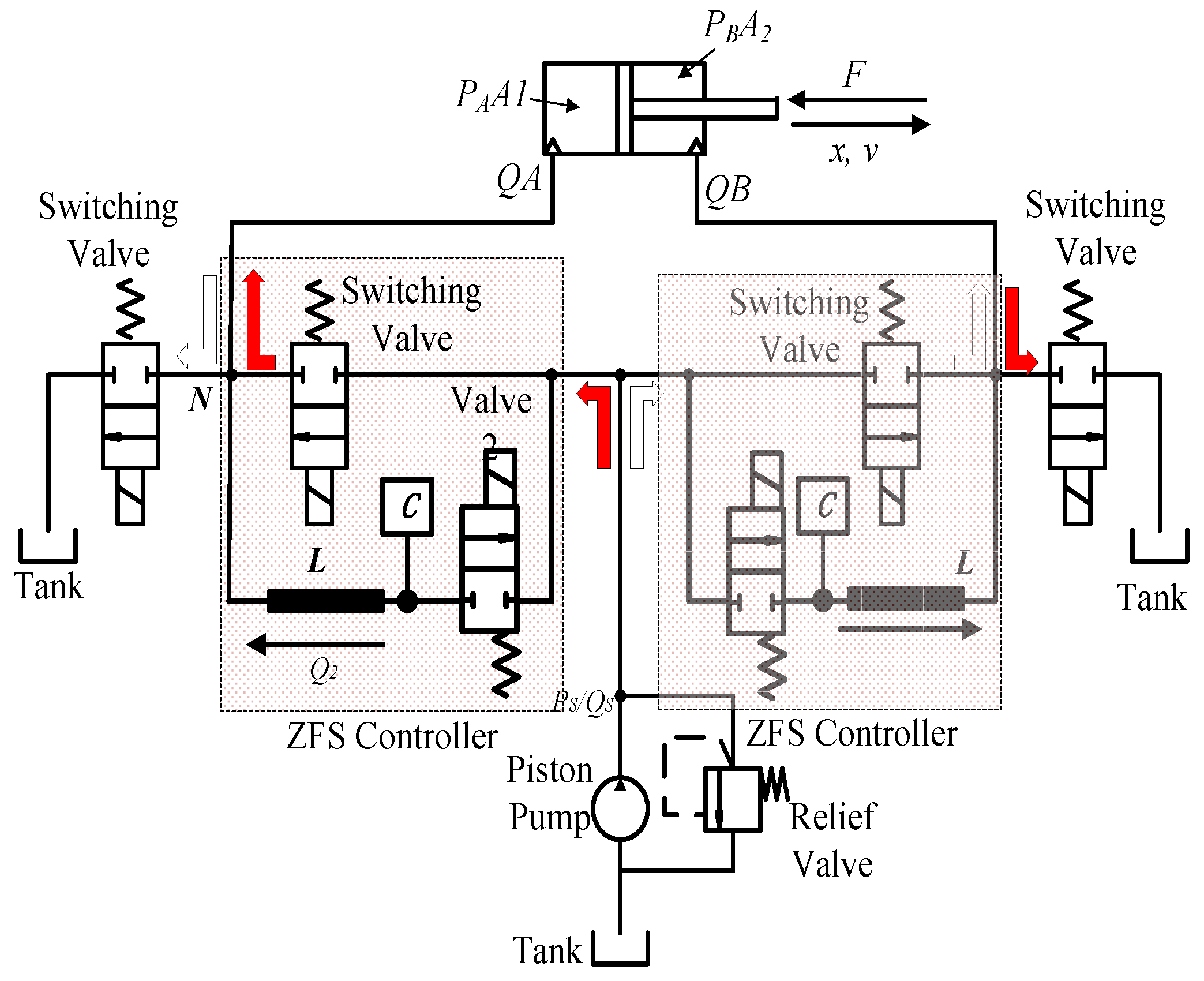
The paper is organized as follows. The second section explains how the switching power loss and pressure pulses are generated in a switching system; the third section presents the schematic of a ZFS control system where two ZFS controllers are used for both extension and drawing back motions of the cylinder in a typical four-port switching system; the principle of a ZFS controller is introduced in this section; after that, mathematic models are built in
Section 4; in
Section 5, a dynamic load is modeled, cylinder capacitance is investigated, and the switching power loss and pressure pulses are also modeled. After that, simulation results are presented in
Section 6. At the end of the paper comes the conclusions for this proposed hydraulic control method.
3. Mathematic Model of a ZFS Control System
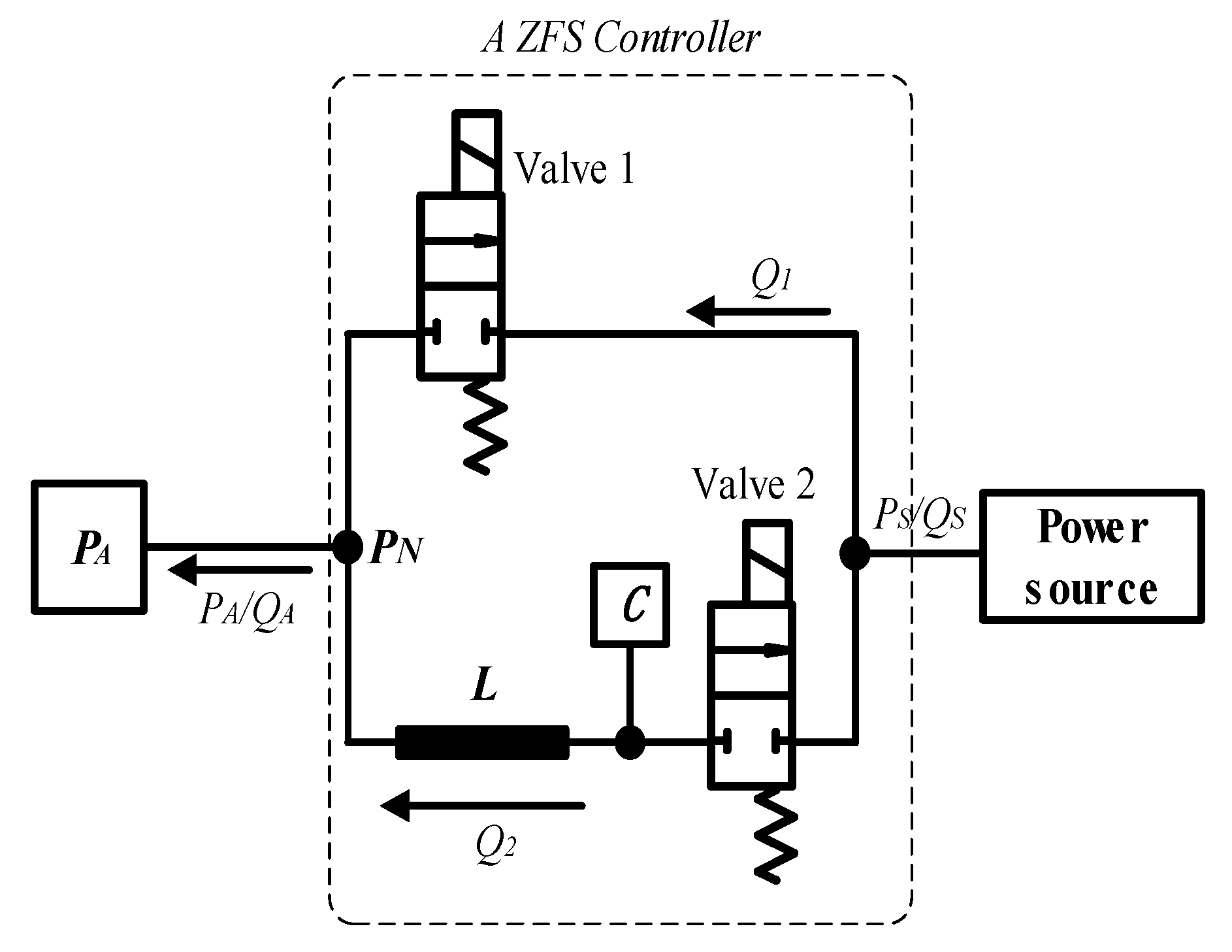
In this section, a ZFS control model with a dynamic load force will be introduced. In [
20], the authors have proposed a basic ZFS model. As shown in
Figure 8, valve 1 is the control valve which stays open when the control line (the line between power source and
PA) is working. When the control line is required to stop, valve 1 will not switch off immediately; instead, the resonant line will start to participate in order to switch off the control line until the control line is ultimately switched off. There are four modes during the whole switching-off process: mode 1, mode 2, mode 3 and mode 4. The working principle for the four modes is explained in [
20]; the related flowrates for each of the modes are presented in
Table 1.
3.1. Dynamic Load of the ZFS Controller
Based on the model in
Figure 8, the system characteristics with dynamic loads will be further discussed in this work. In the model described in
Figure 8, the piston is moving with a constant velocity and varied load force, thus the input pressure of the cylinder is
The tank pressure is zero, thus the pressure
PB can be regarded as the pressure difference across the valve, and is derived as follows
where
Cq is flow coefficient and
ρ is the density of the fluid. Hence,
PA is derived as
3.2. Dynamic Capacitance of the Cylinder
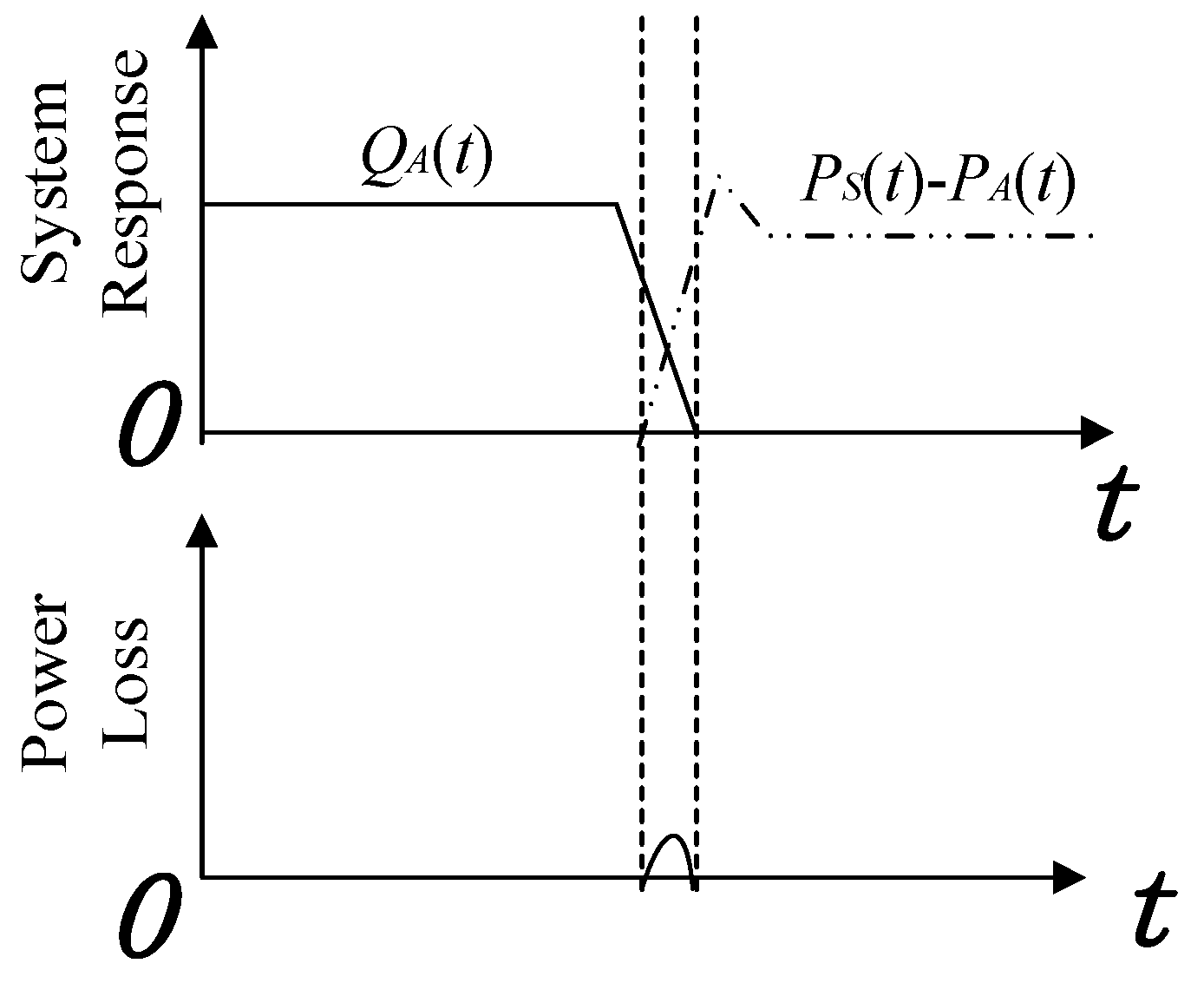
In a ZFS controller, the resonant line generates flowrate waves to make the flowrate through the valves reduce to zero. Theoretically, the valve switches off at the zero-flowrate moment, and the power loss is thus zero. However, the switching-off moment of the valve cannot exactly match the zero-flowrate moment in a real hydraulic system. The error between the switching-off moment and the zero-flowrate moment will lead to some power loss. The larger the error is, the more the power loss is. Therefore, accurately simulating zero-flowrate moments is very important to improve system efficiency.
Normally, the input flowrate of a cylinder is calculated with the piston velocity timing and piston area. However, the capacitance of the input chamber of a cylinder has an influence on its flowrates. When the system load force is various, cylinder capacitance can be complex. To better simulate the input flowrate of the cylinder, the influence of the capacitance on the cylinder input flowrate is modeled. When the load force is changing, the cylinder chamber works as the capacitance
Ccyl; the following relationship is derived using Equation (13)
where cylinder capacitance
Ccyl is determined by the dimensions of the cylinder chamber and the pipe between the control valve and the cylinder input port.
Then, the flowrate change due to the load change is obtained.
where
QA is
3.3. Switching Power Loss
Switching power loss exists due to the pressure difference and flowrate during the switching-off process. Physical switching valves are not ideal ones which transfer directly from an ON state to an OFF state. Actually, the orifice of the valve is gradually closed until the valve is completely switched off.
In a ZFS controller, two switching valves are located in the circuit. Theoretically, two switching valves are designed to switch off at the zero-flowrate moment.
The switching power loss for valve 1 is
The switching power loss for valve 2 is
Total switching loss for a ZFS controller is
It is assumed that pressure pulses happen after the switching-off process of the valves. The total value of the fluid energy before and after the switching-off process is kept constant, which fulfills Equation (3). By substituting Equations (4) and (5) with Equation (3), it is obtained that
The switching pulse for valve 1 is derived by substituting Equation (21) for Equation (24)
The switching pulse for valve 2 is derived by substituting Equation (22) for Equation (25)
4. Stateflow Controller
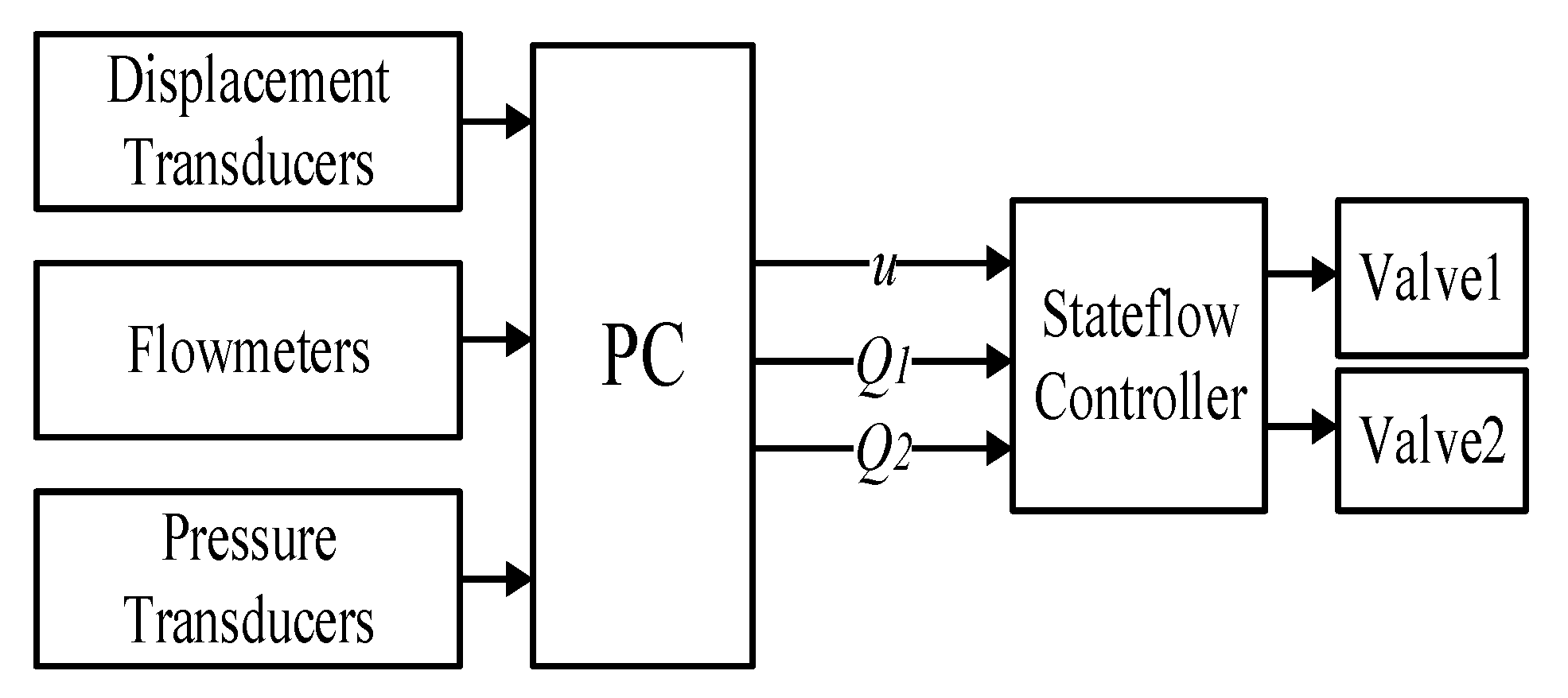
Figure 9 shows the schematic of the electronic controller for a ZFS control system. Position of the cylinder piston, flowrate of hydraulic lines, and system pressures are collected by the transducers and sent to a PC. When it is ready to switch off the control line, the PC sends a command to a stateflow controller. At the same time, the flowrate of
Q1 and
Q2 are also sent to the stateflow controller.
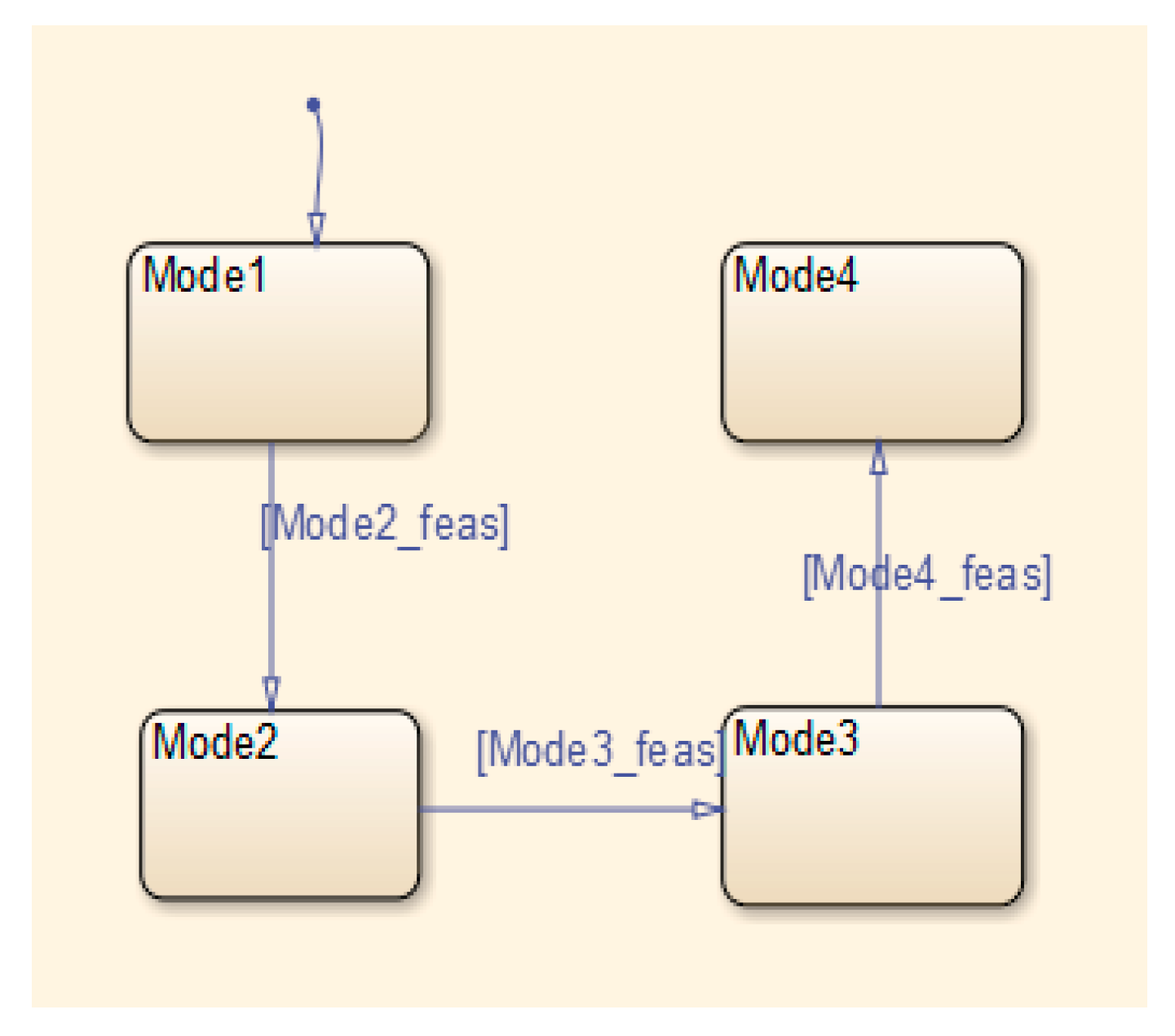
The stateflow chart (shown in
Figure 10) determines the running mode of the system. When the stateflow controller receives command
u from the PC, the system automatically runs in mode 1; when
u = 1 is true, the controller is switched to mode 2; when
Q1 = 0 is true, the controller is switched from mode 2 to mode 3; when
Q2 = 0 is true, the controller is switched to mode 4. The conditions are defined as:
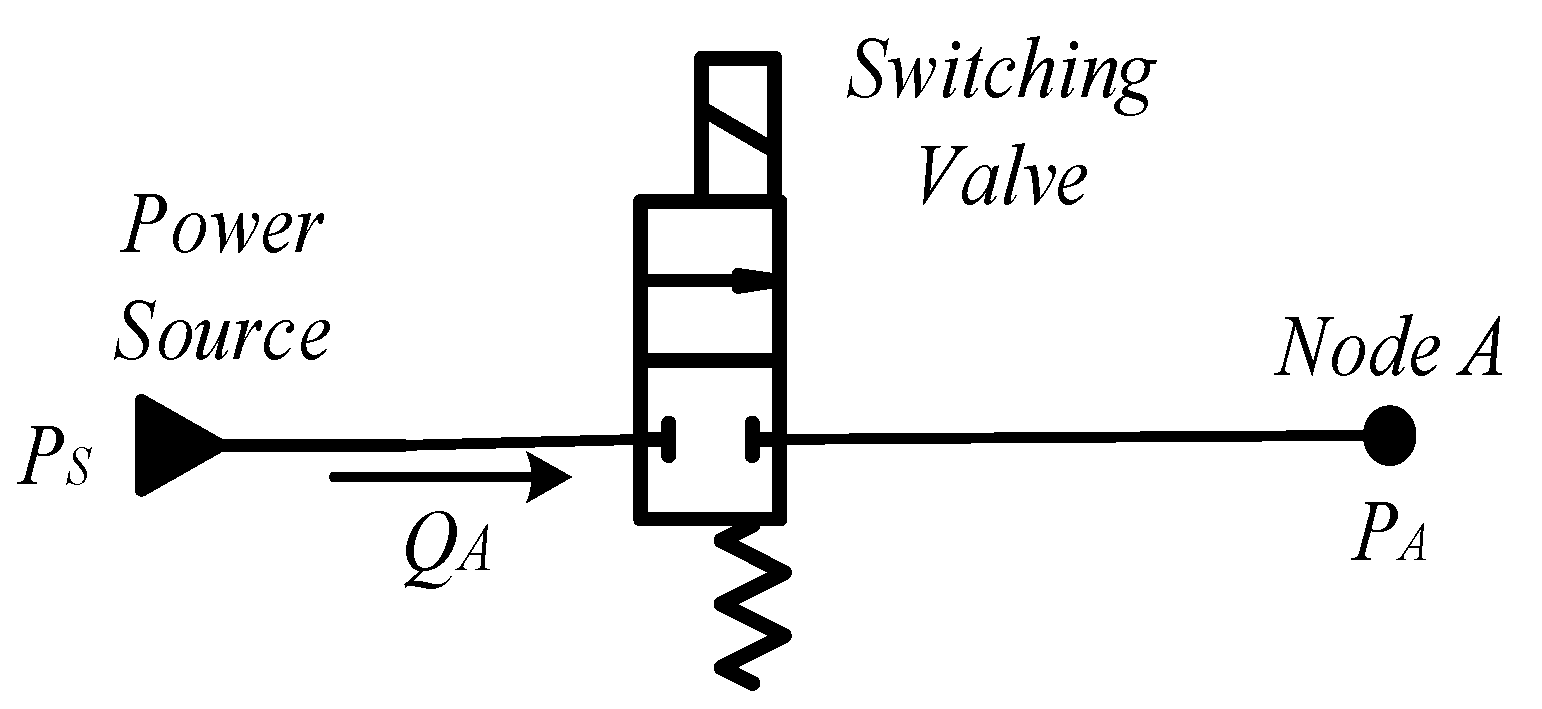
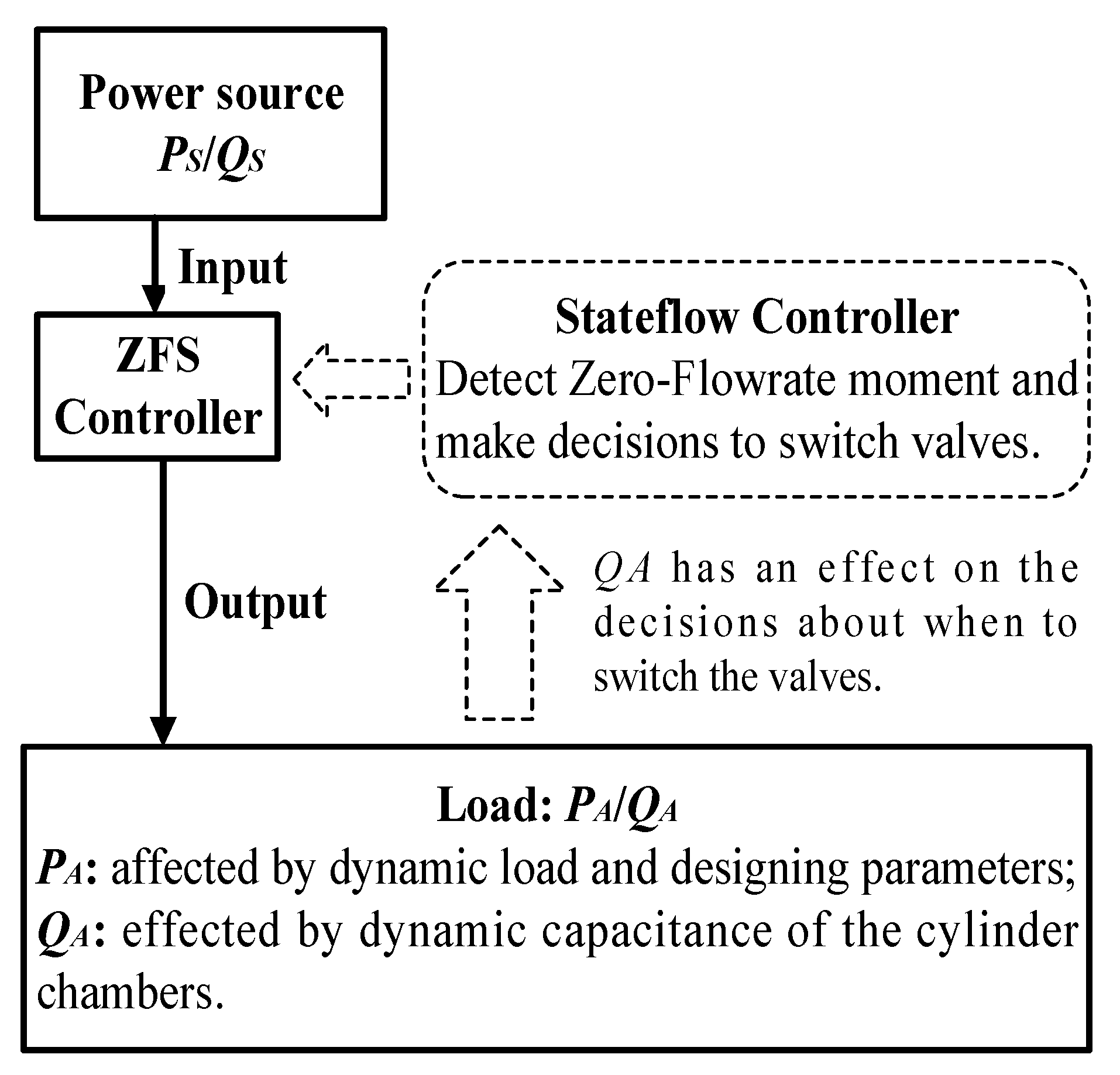
Figure 11 shows the relationship between the performance of a ZFS controller and some parameters of the system. The power source provides PS/QS as an input of the ZFS controller. Most piston pumps are feasible options to pressurize the system with proper pressure waves due to the reciprocating movement of the pistons. The output of the ZFS controller is defined by system parameters: the PA is required by the velocity and dimensions of the cylinder, as well as the exerted load force on the cylinder rod. The QA basically adapts the velocity of the cylinder. The capacitance of the cylinder would also have an effect on the QA, since a large derivation of the load force creates a certain flowrate within a fixed volume (the cylinder chamber can be regarded as a fixed volume when the time derivation is very small). A stateflow controller is employed to detect zero-flowrate moments and make decisions about when to switch the valves.
In this section, the output PA and QA are modeled taking into consideration the dynamic load of the system and the dynamic capacitance of the cylinders. The models of switching power loss are built for both valves in the ZFS controller based on a linear characteristic of the valve opening. The pressure pulses are modeled for both valves in a ZFS controller according to the principle of fluid energy. All the models are built based on the following assumptions:
- (1)
The pump outputs sinusoidal pressures at one frequency.
- (2)
All the valves switch at zero-flowrate moments.
- (3)
The opening of the valves changes linearly during switching processes.
5. System Evaluation
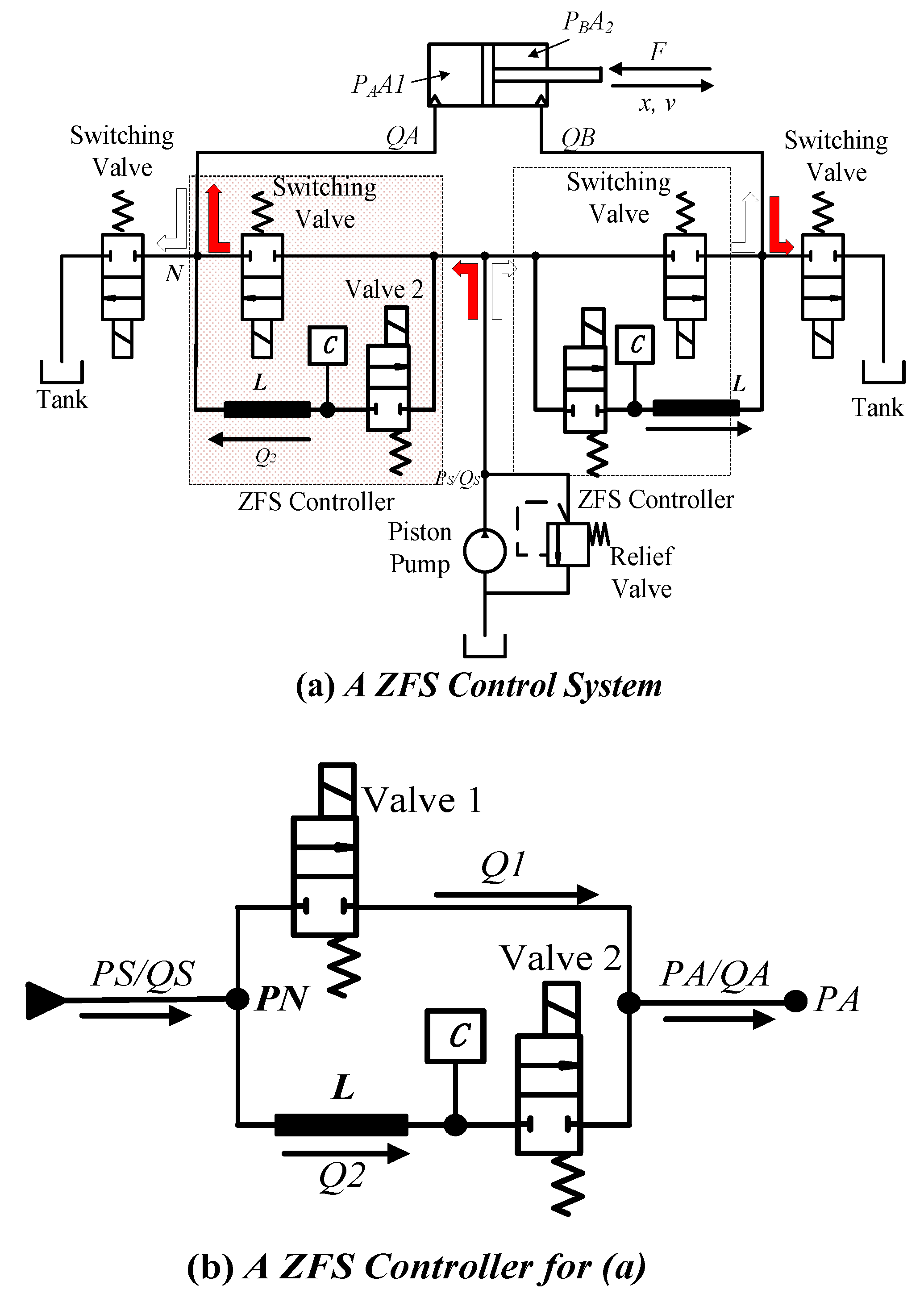
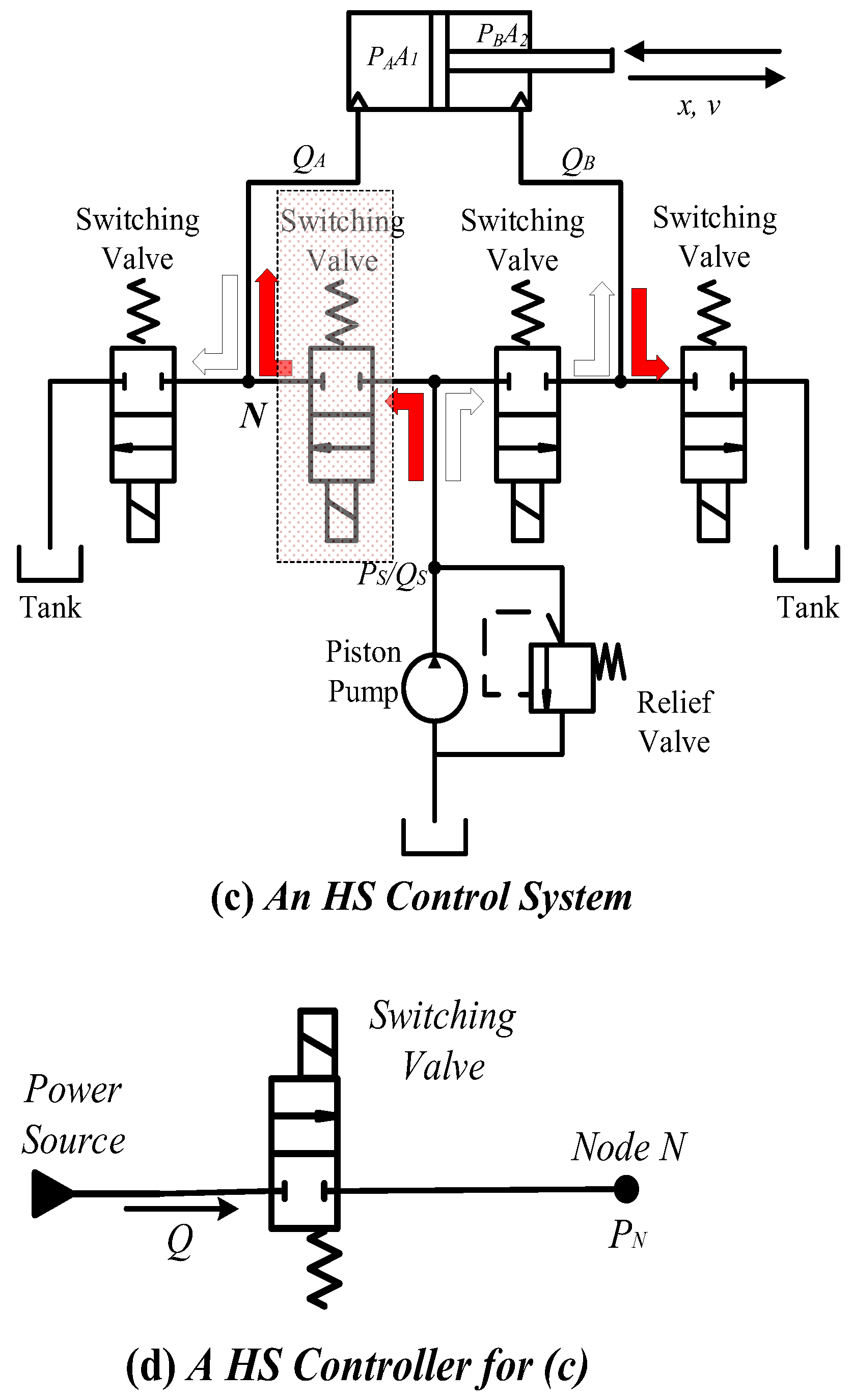
A dynamic ZFS controller (shown in
Figure 12a,b) and a Hard-Switching (HS) system (shown in
Figure 12c,d) are built for evaluation. A hydraulic inductance is realized by a piece of pipe with a length of 0.2 m and diameter of 0.008 m. A hydraulic capacitance is realized by an accumulator with a linear spring; the volume of the accumulator is 0.8 L.
The characteristics of the two systems are evaluated in this section. The dynamic capacitance, switching power loss and pressure pulses due to the switching-off of the valves are analyzed, respectively.
The tested systems are operated to drive a load at the speed of 0.06 m/s and with a load force of 40,000 N. The system pressure is 205 bar with waves whose amplitude and frequency are 2 bar and 113 Hz, respectively. The maximum flowrate of the pump is 7.5 L/min. Other parameters of the systems are presented in
Table 2.
5.1. Dynamic Capacitance of the Cylinder
When the piston of the cylinder is moving, the volume of the cylinder chamber is varied; the varied chamber shows capacitance when the load force is changing. Such dynamic capacitance leads to flowrate change. According to Equation (12), the pipe volume and piston area have an effect on the flowrate change.
Figure 13 presents a linear relationship between the position of piston
x and the derivation of flowrate d
Q. The piston area is 0.002 m
2, the diameter of the pipe of 0.012 m and the length of the pipe is 1 m. As the position of piston
x increases from 0 m to 0.2 m, the derivation of flowrate d
Q linearly increases correspondingly. When d
F is 200 N, the derivation of flowrate d
Q is relatively small and the slope of the curve is small; as d
F increases, both d
Q and the slope of the curve respond to this increase.
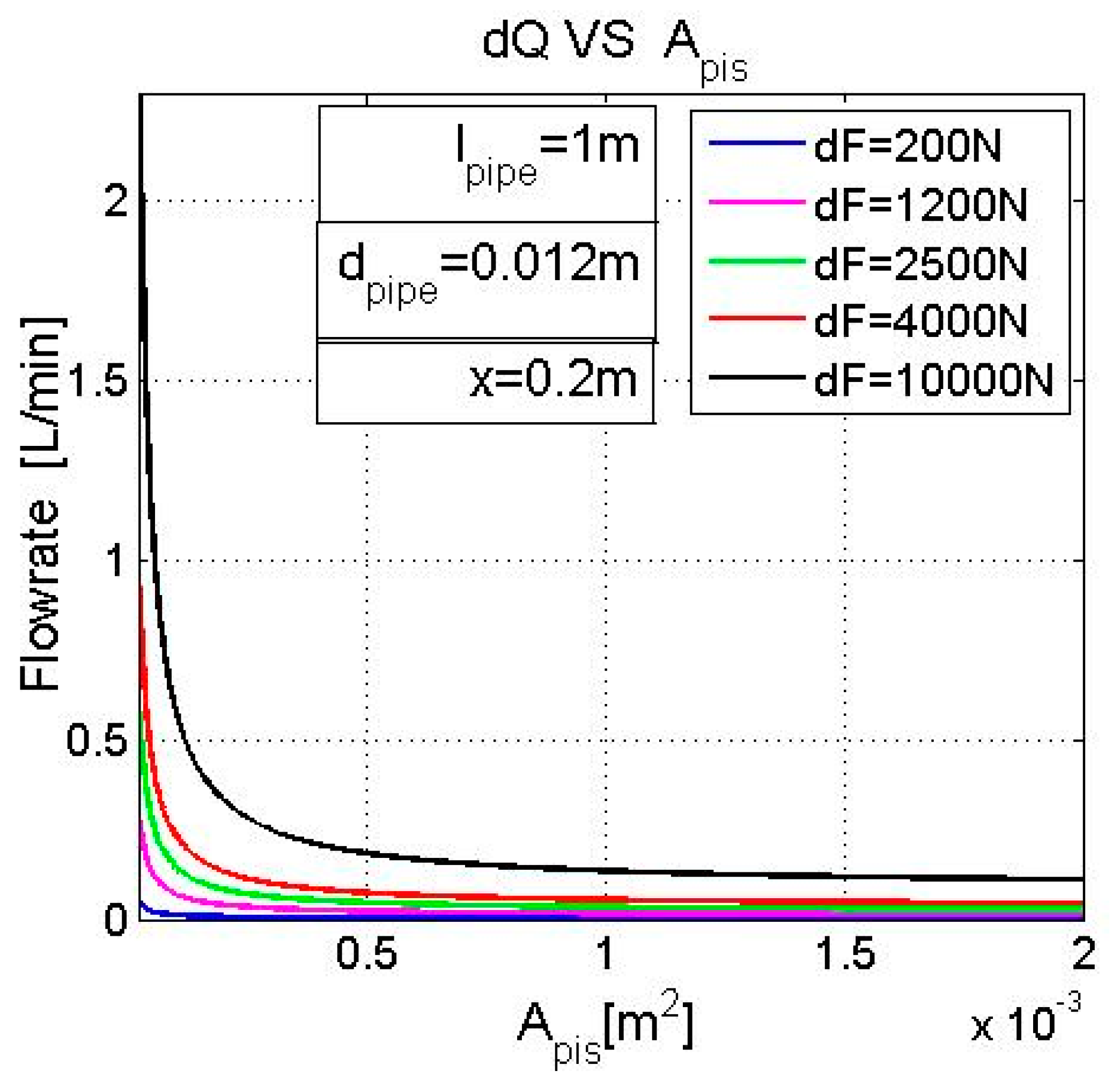
Figure 14 presents the relationship between the piston area and the flowrate change when the position of piston
x = 0.2 m. When d
F is fixed, it shows that the smaller the area of the piston is, the larger the derivation of the flowrate is. When the flowrate change d
Q becomes infinitely large, then the area of the piston
Apis becomes infinitely small.
When the area of the piston is Apis fixed, the derivation of flowrate dQ changes as the derivation of force dF increases. Take Apis = 5 m2, for example; the derivations of the flowrates are dQ = 0.0038 L/min when dF = 200 N, 0.023 L/min for when dF = 1200 N, 0.053 L/min when dF = 2500 N, 0.073 L/min when dF = 4000 N and 0.2 L/min when dF = 10,000 N.
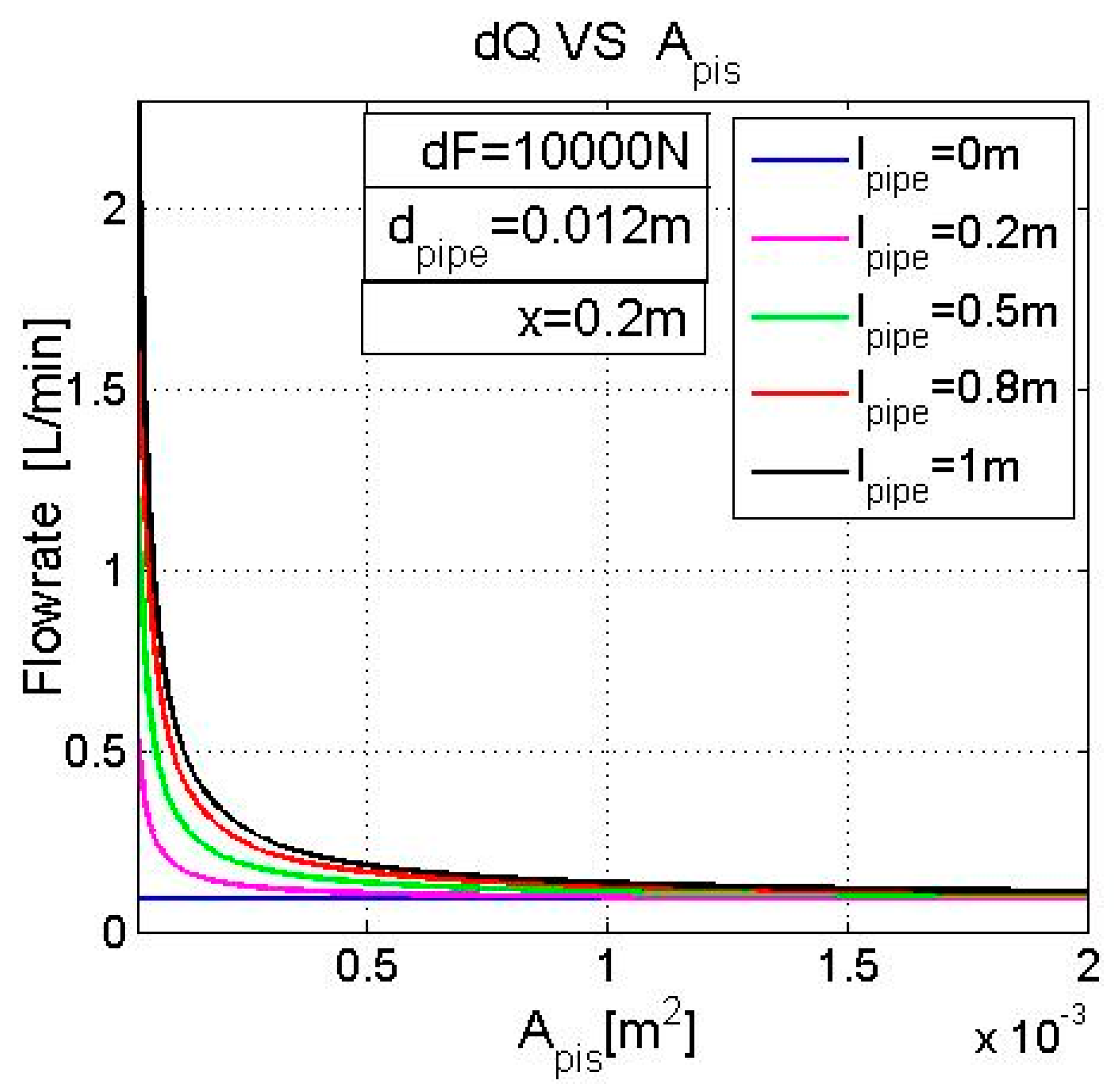
A similar effect, the one the area of piston
Apis has on the derivation of flowrate d
Q, is found in
Figure 15. For a fixed pipe length
lpipe, the smaller the area of piston
Apis is, the larger the derivation of flowrate d
Q is.
Figure 14 also presents the relationship between the piston area
Apis and the flowrate change d
Q. When d
F changes from 200 N to 10,000 N, generally speaking, d
Q increases as the length of the pipe
lpipe increases. When
lpipe is 0 m, the line is flat and straight; when
lpipe is larger,
Apis has more of an effect on d
Q in small, scaled devices. By comparing the five figures with each other, a larger d
F leads to a larger d
Q. When d
F is 10,000 N and
Apis is 0.002 m
2, d
Q is 0.1 L/min.
5.2. Switching Power Loss
The switching power loss is also investigated for the two models.
Figure 16 and
Figure 17 show the system responses for the dynamic ZFS system and HS system. In
Figure 16, valve 2 is switched on at the end of mode 2. Then, the flowrate of the accessory line
Q1 decreases as the flowrate of the main line
Q2 increases.
Q1 falls down to zero and then valve 1 stays closed.
Q2 keeps going up and then falls down until its value is less than the load flowrate
QA. Then, the supply flowrate supplies the system together with the resonant flowrate. The resonant flowrate falls down to zero and then goes in the opposite direction. Once the value of the resonant flowrate achieves the maximum supply flowrate
QSmax, the flowrate
Q2 starts to decrease from
QA until it reaches zero. Then, valve 2 is switched off.
Q2 finally stays at zero after valve 2 is completely switched off.
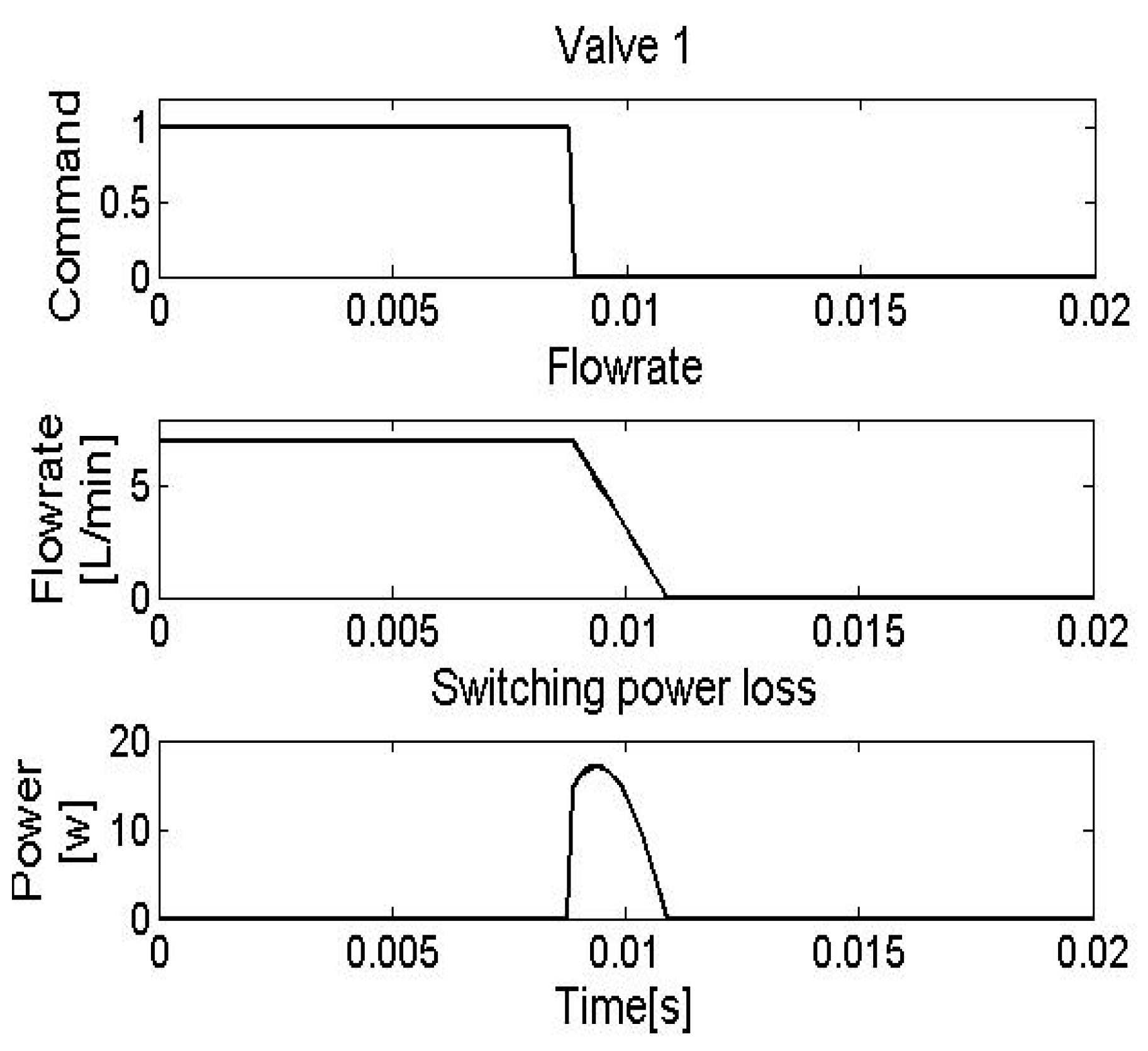
According to the fifth plot in
Figure 16, switching power loss occurs during two stages: one is for valve 1 and the other is for valve 2. The peak power losses are 4 w and 0.4 w for the two stages, respectively, compared to 17 w for the HS system (shown in
Figure 17).
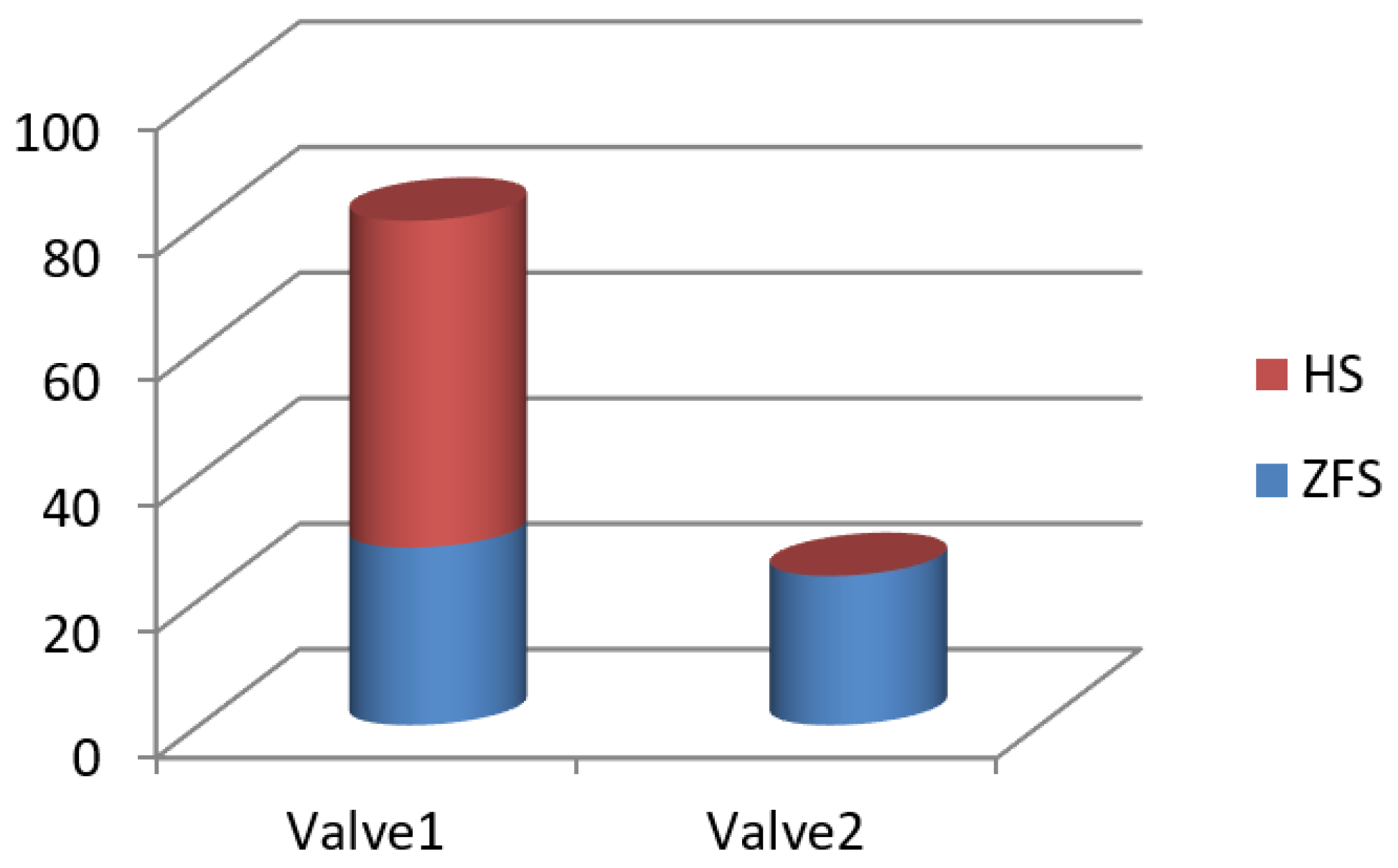
Table 3 presents the energy consumptions of the two systems. The total switching power loss consumed by the ZFS system is 32 J versus 203 J consumed by the HS system (shown in
Figure 18 and
Table 3).
5.3. Pressure Pulses
As shown in
Figure 19 and
Table 4, one switch in a normal HS controller excites pressure pulses with a peak value of 1.1 × 10
6 Pa, while the peaks of the pressure pulse are 1.1 × 10
4 Pa and 2.3 × 10
5 Pa for valve 1 and valve 2, respectively. Pressure pulses in a ZFS system are much minor than those in a HS system.
6. Conclusions
In hydraulic applications, the switching-off of fast-switching valves leads to considerable switching power loss and pressure pulses. In this work, a dynamic ZFS controller is proposed to switch off valves at zero-flowrate moments. With the novel controller, the system achieves small switching power loss and suffers minor pressure pulses.
To better simulate zero-flowrate moments and make the switching power loss as small as possible, this paper takes into account the models of dynamic load forces and cylinder capacitance. In the following applications, dynamic load forces and cylinder capacitance should be considered when running a ZFS controller:
- (1)
Applications where the cylinder stroke is large.
- (2)
Applications where the derivation of load forces is large.
- (3)
Applications where the piston/rod areas of the cylinders are small.
- (4)
Applications where the pipe length between the output of the ZFS controller and the input of the cylinder is large.
The results show the advantage of a dynamic ZFS system in relation to its energy saving performance. The total switching power loss consumed by the ZFS system is 32 J versus 203 J consumed by the HS system. The system applying the dynamic ZFS controller consumes only 16% of the energy that is consumed by a normal HS system.
Moreover, the system with a dynamic ZFS controller leads to minor pressure pulses. One switch in a normal HS controller excites pressure pulses with a peak value of 1.1 × 106 Pa, while the peaks of the pressure pulse are 1.1 × 104 Pa and 2.3 × 105 Pa for valve 1 and valve 2, respectively. Pressure pulses in a dynamic ZFS system are much minor than those in a HS system.
It can be concluded that the dynamic ZFS controller provides a solution to achieve better efficiency performance and make pressure pulses as minor as possible in typical four-ports hydraulic systems. Besides in typical 4-ports hydraulic systems, switching also exists in traditional proportional/servo hydraulic systems where high frequency-switching happens. The ZFS control method provides a potential solution for those systems with large switching power loss and unsmooth pressure response caused by valve switching.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}