
Load Emulation with Independent Metering for a Pump Test Bench


Abstract
:1. Introduction
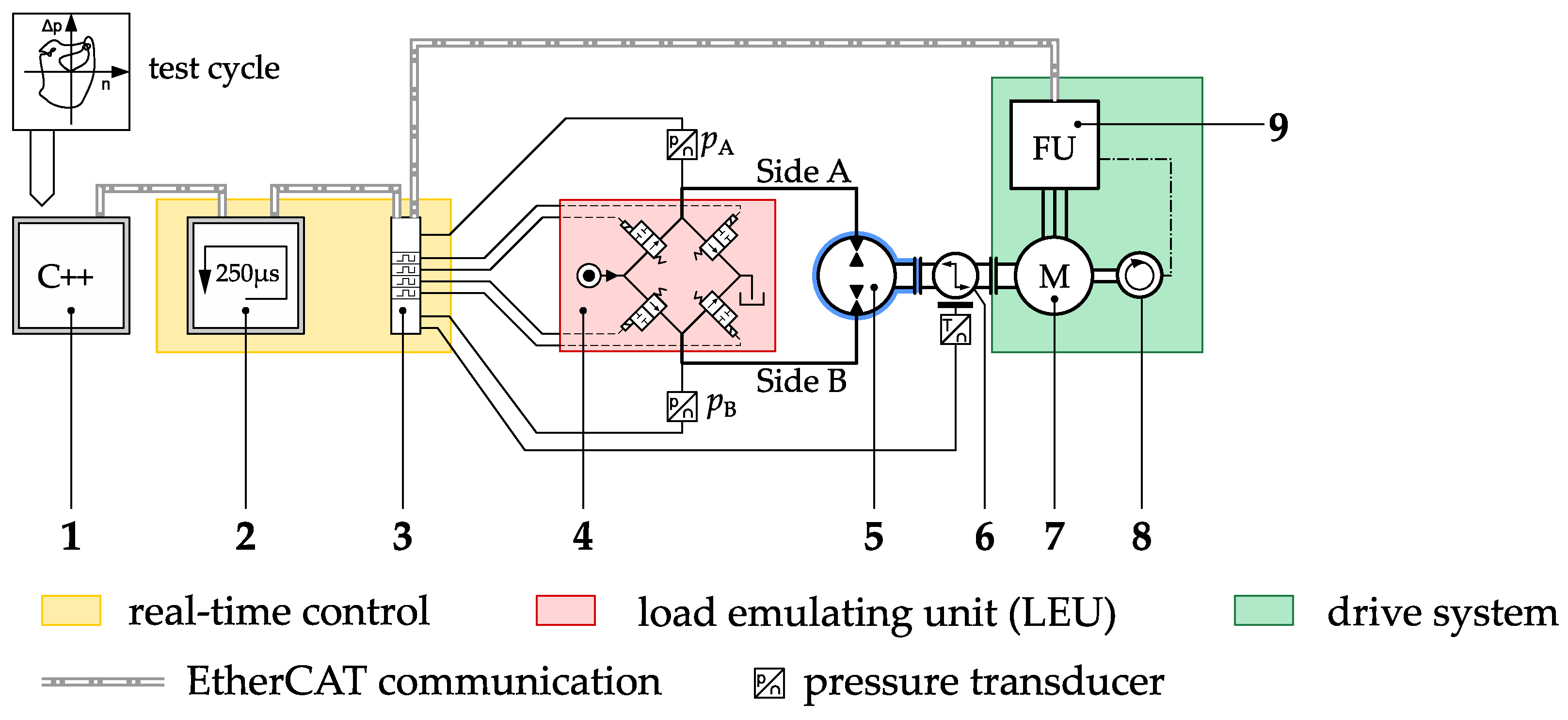
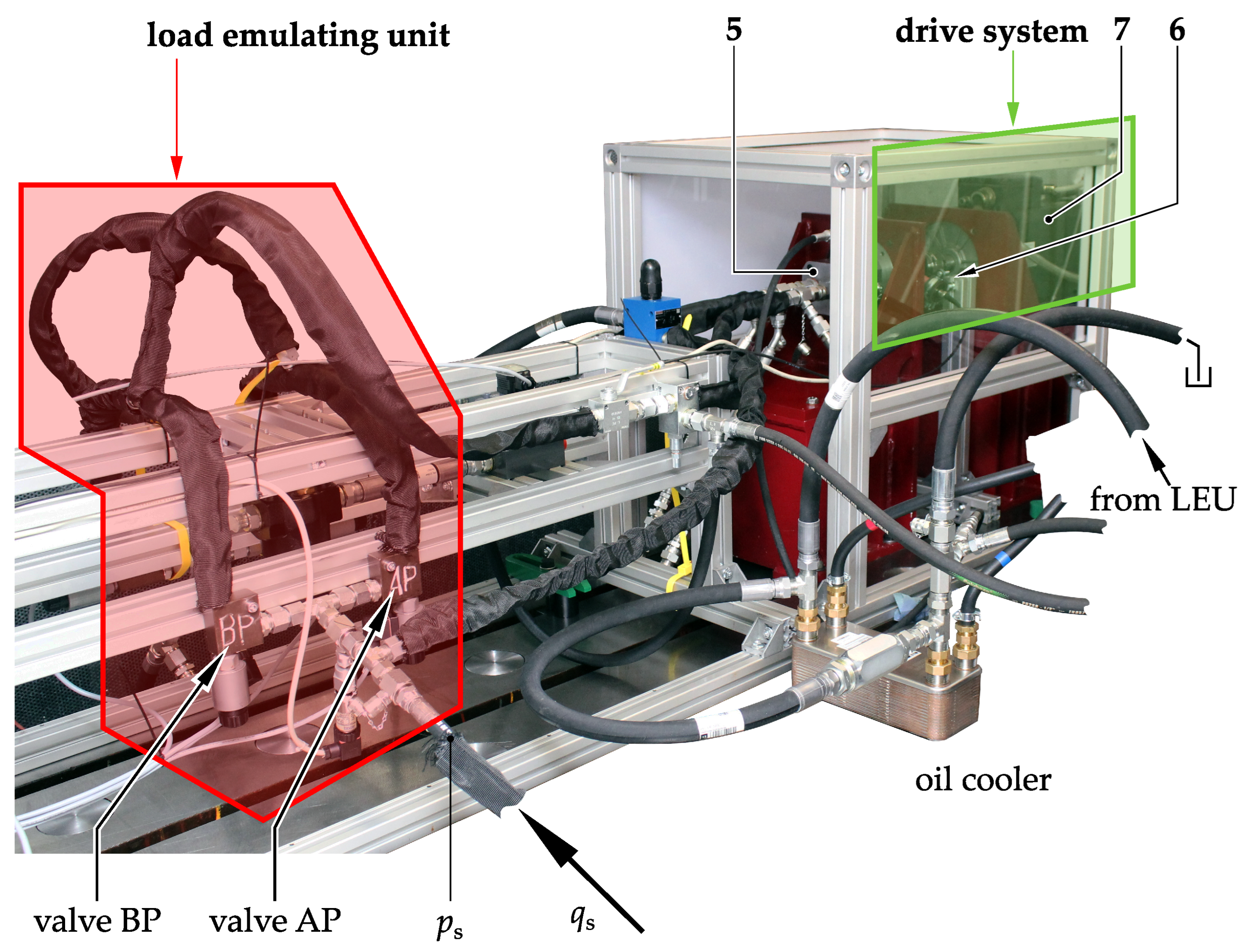
2. Test Bench
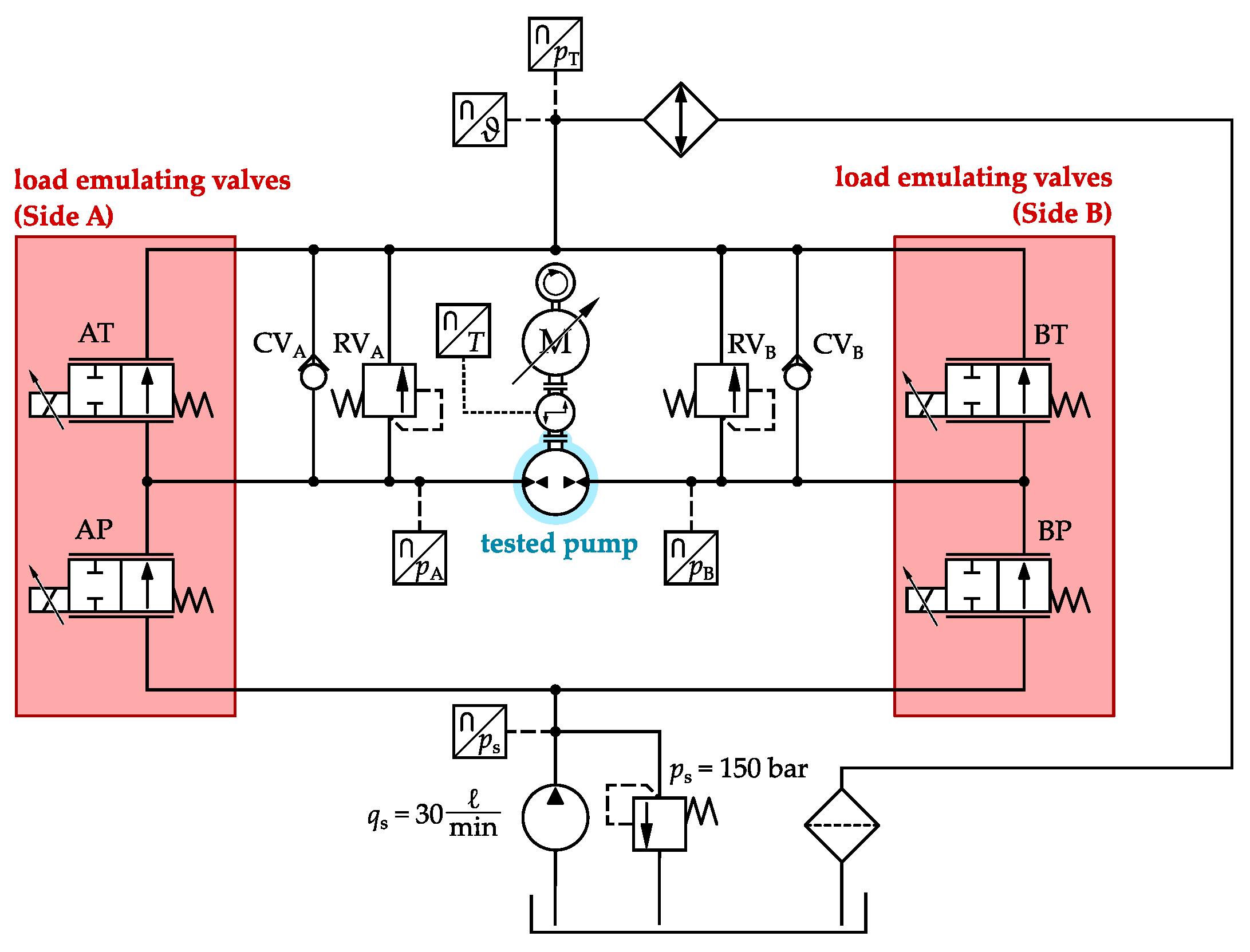
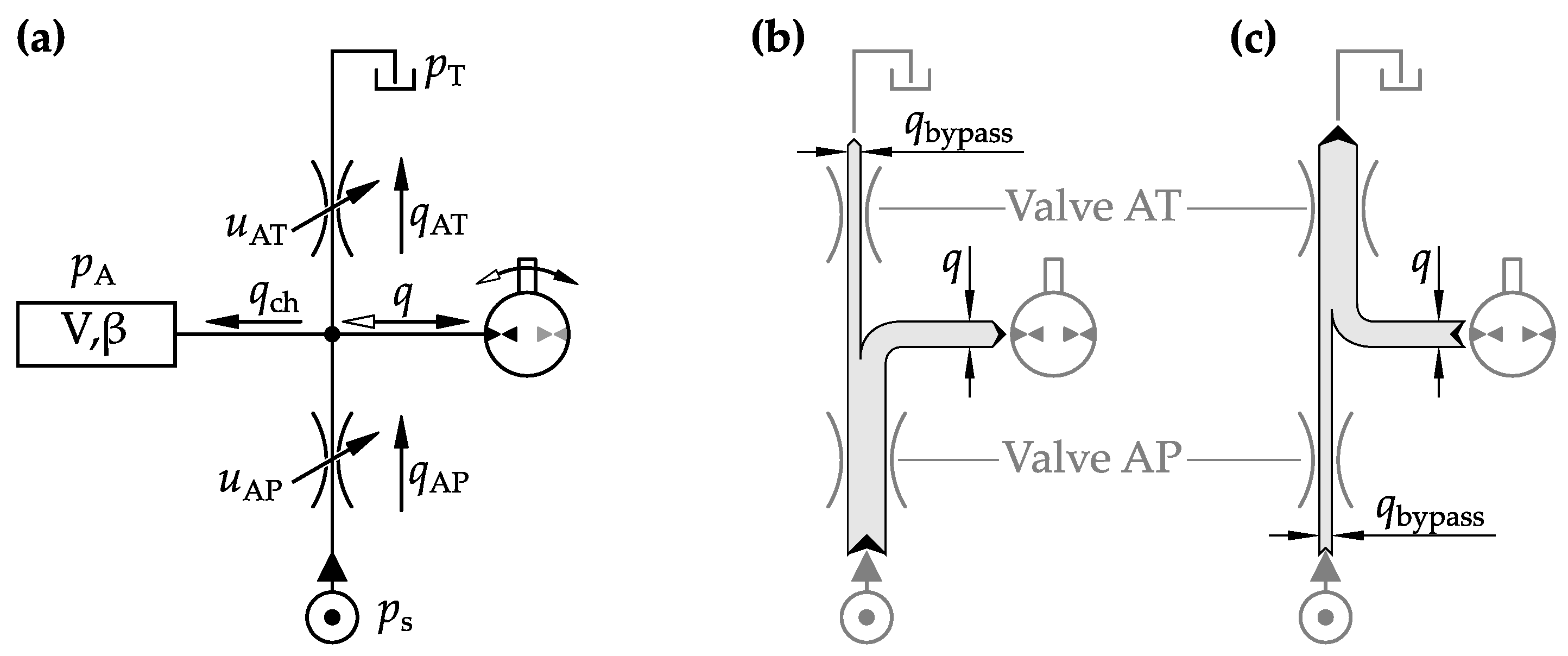
2.1. Hydraulic System
2.2. Design of the Load Emulating Unit (LEU)
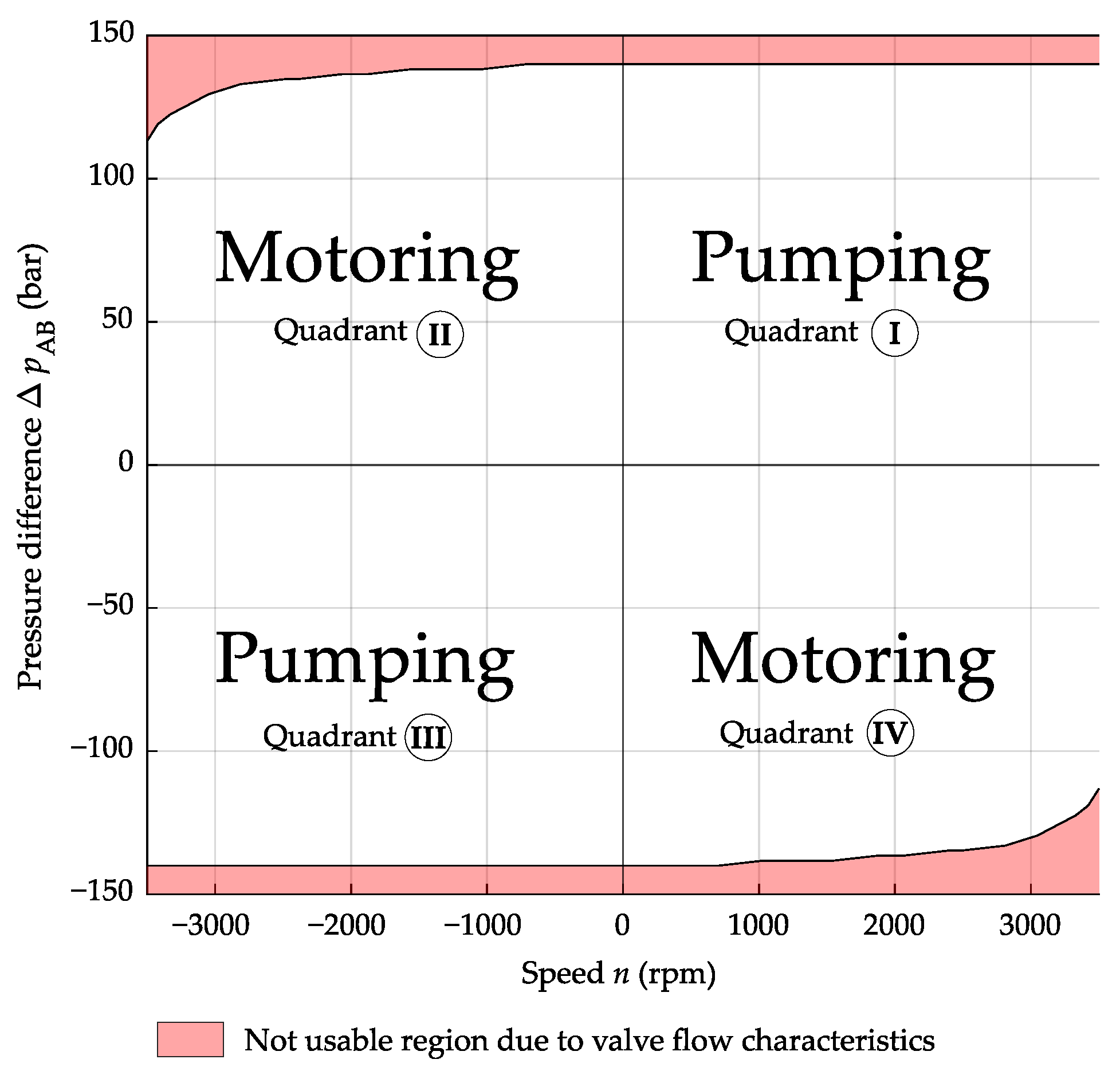
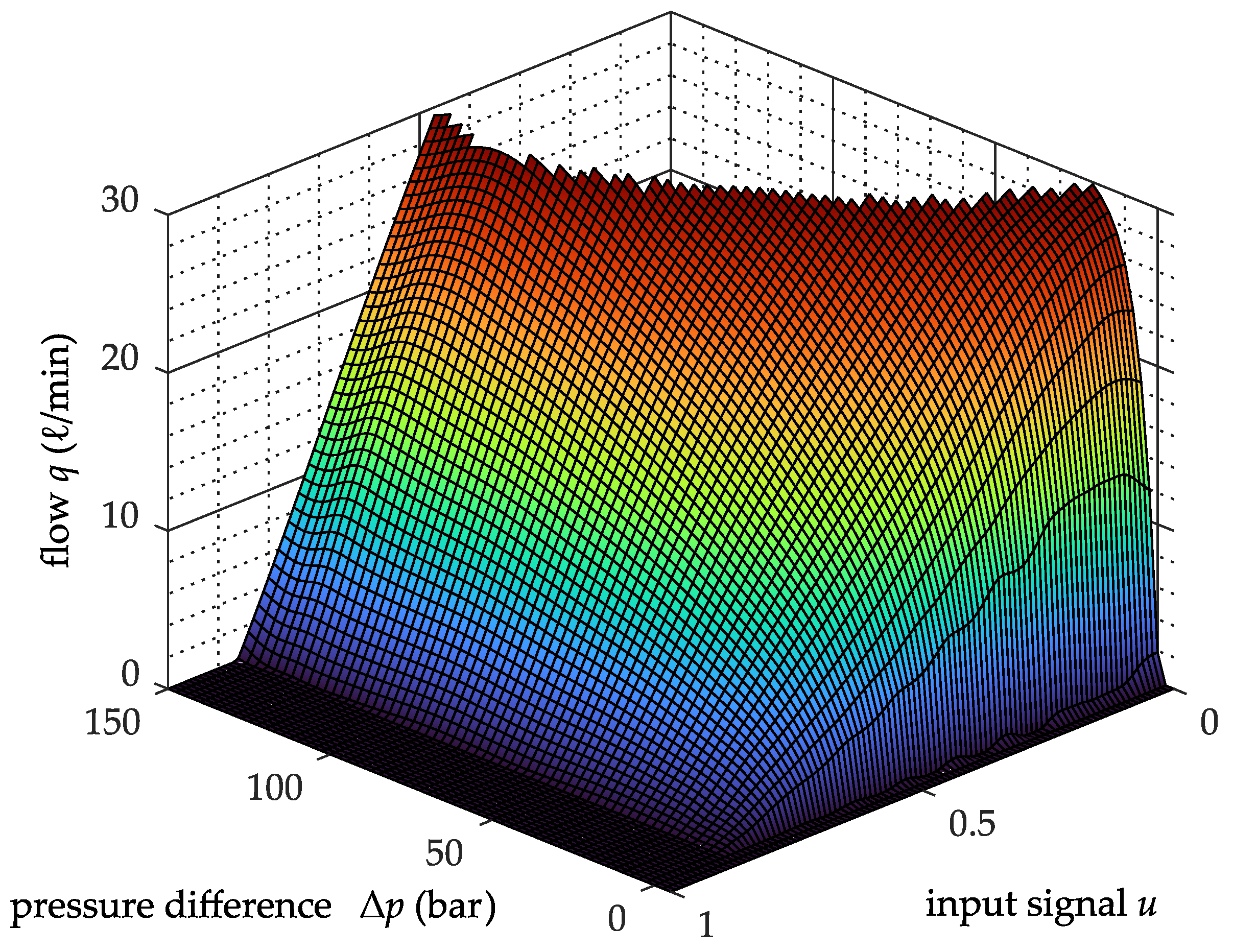
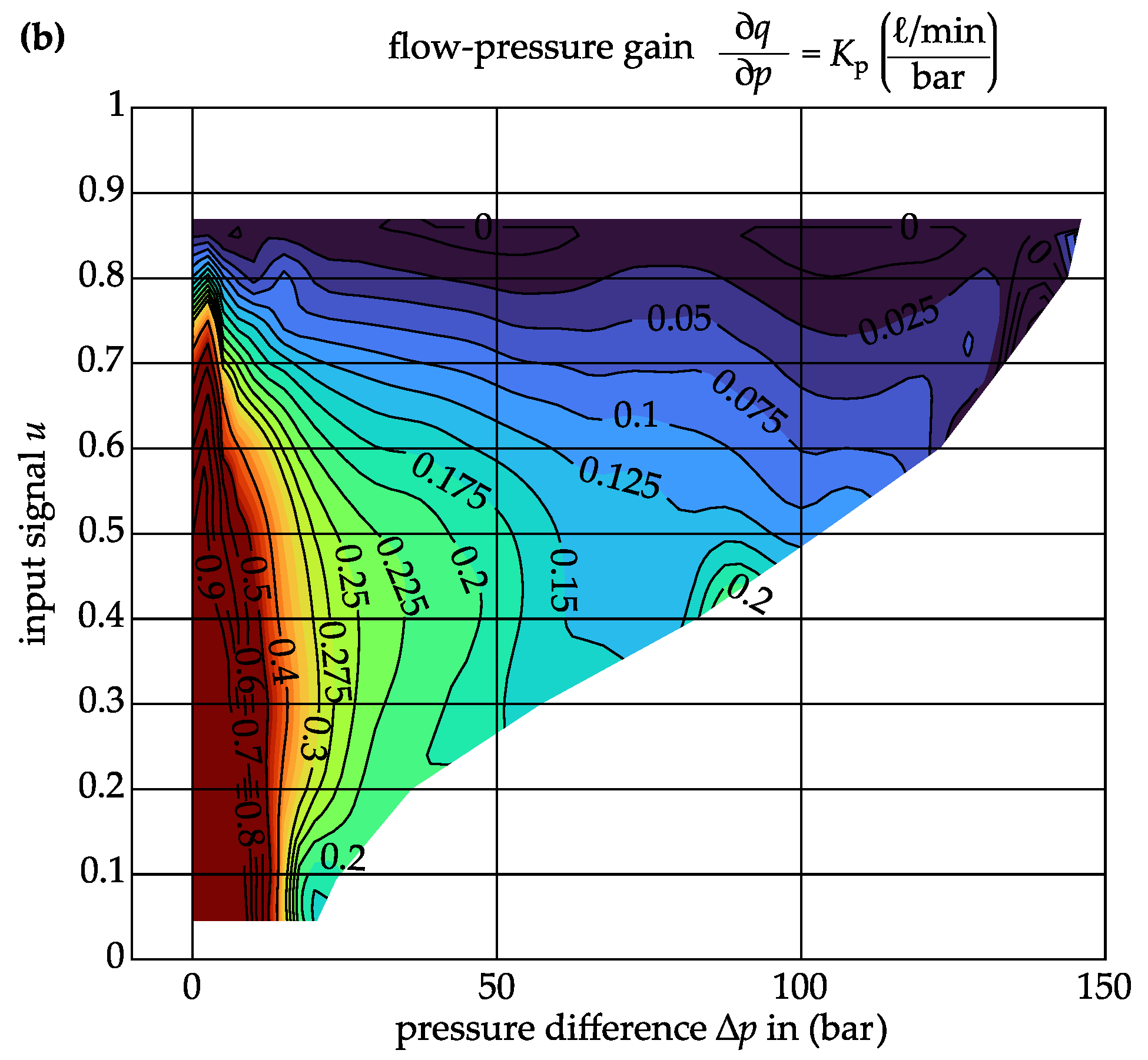
2.3. System Analysis
- Change of compressibility with pressure [14];
- Valve actuator force limitation;
- Saturation of the valves;
- Static and kinetic friction in the valves leading to hysteresis;
- Limited supply flow.
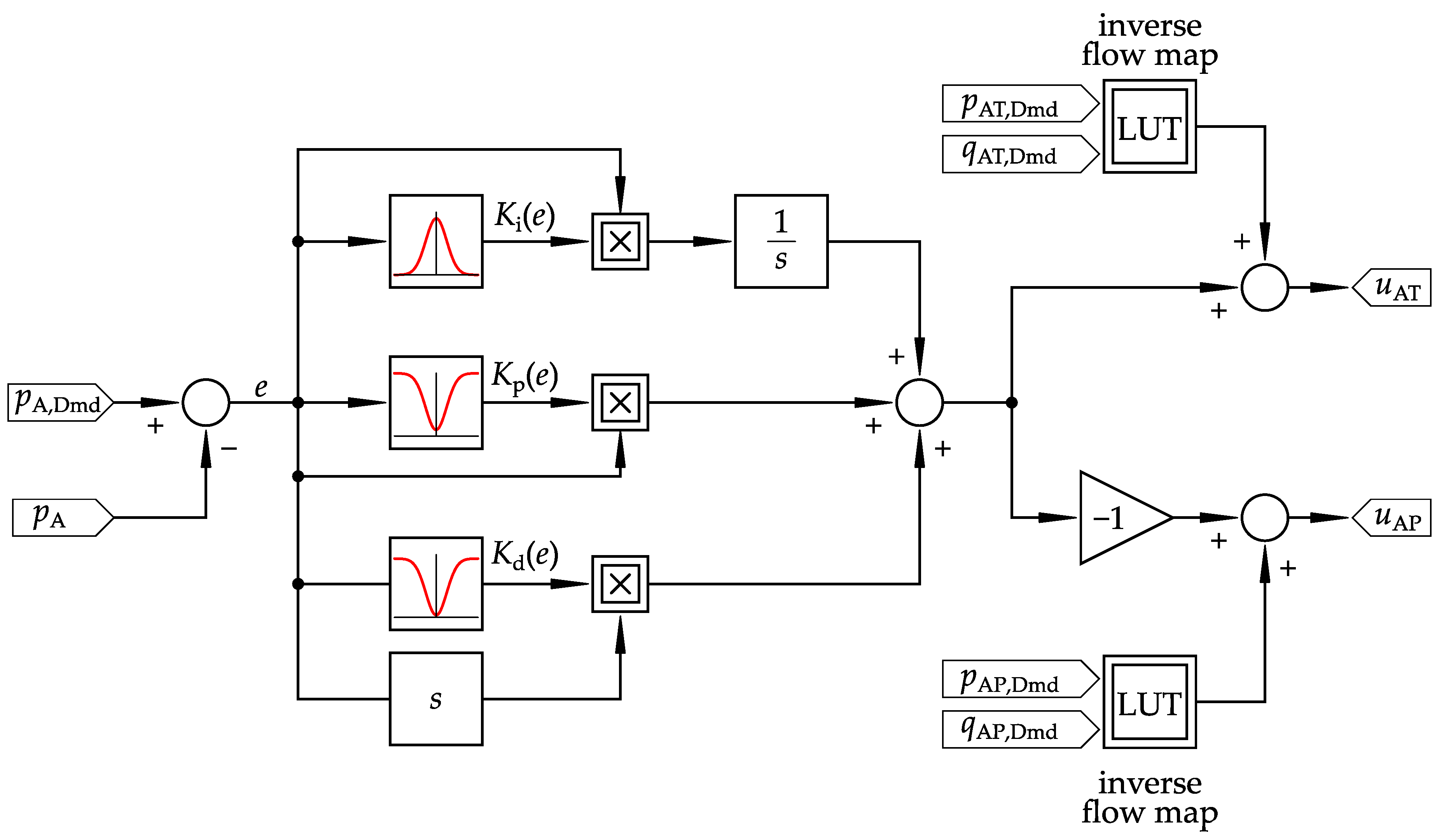
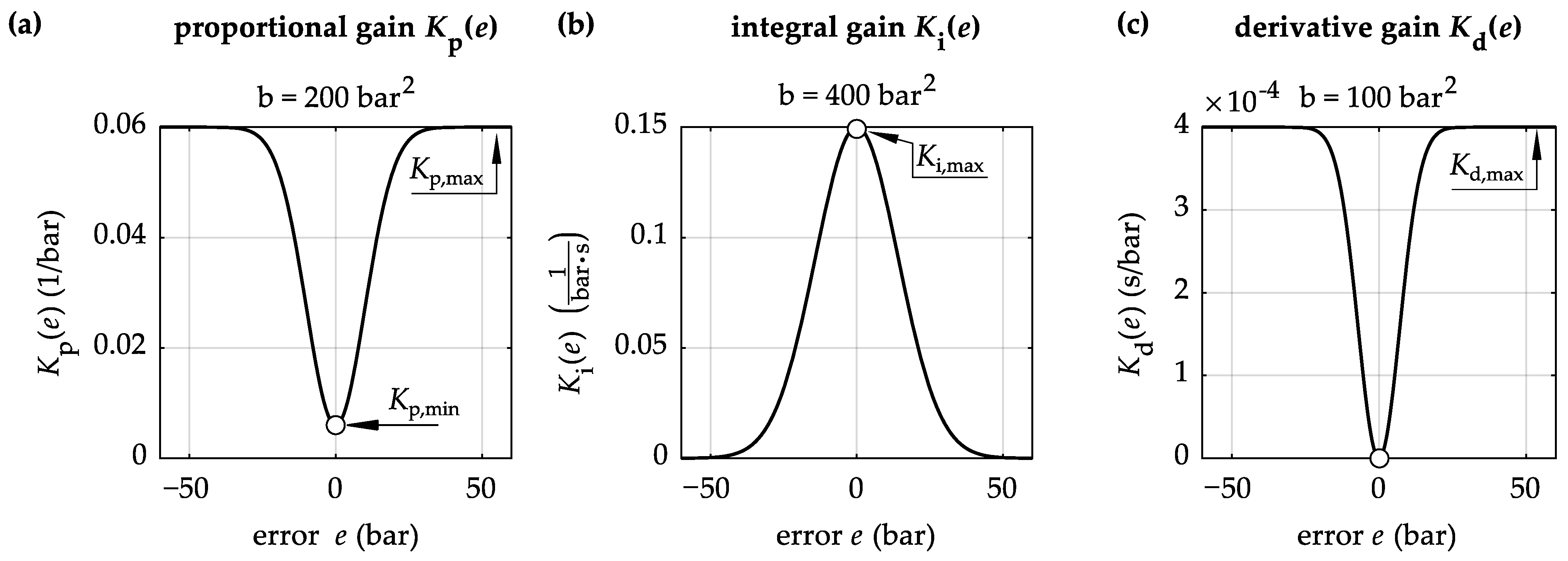
2.4. Control Design
3. Experimental Results
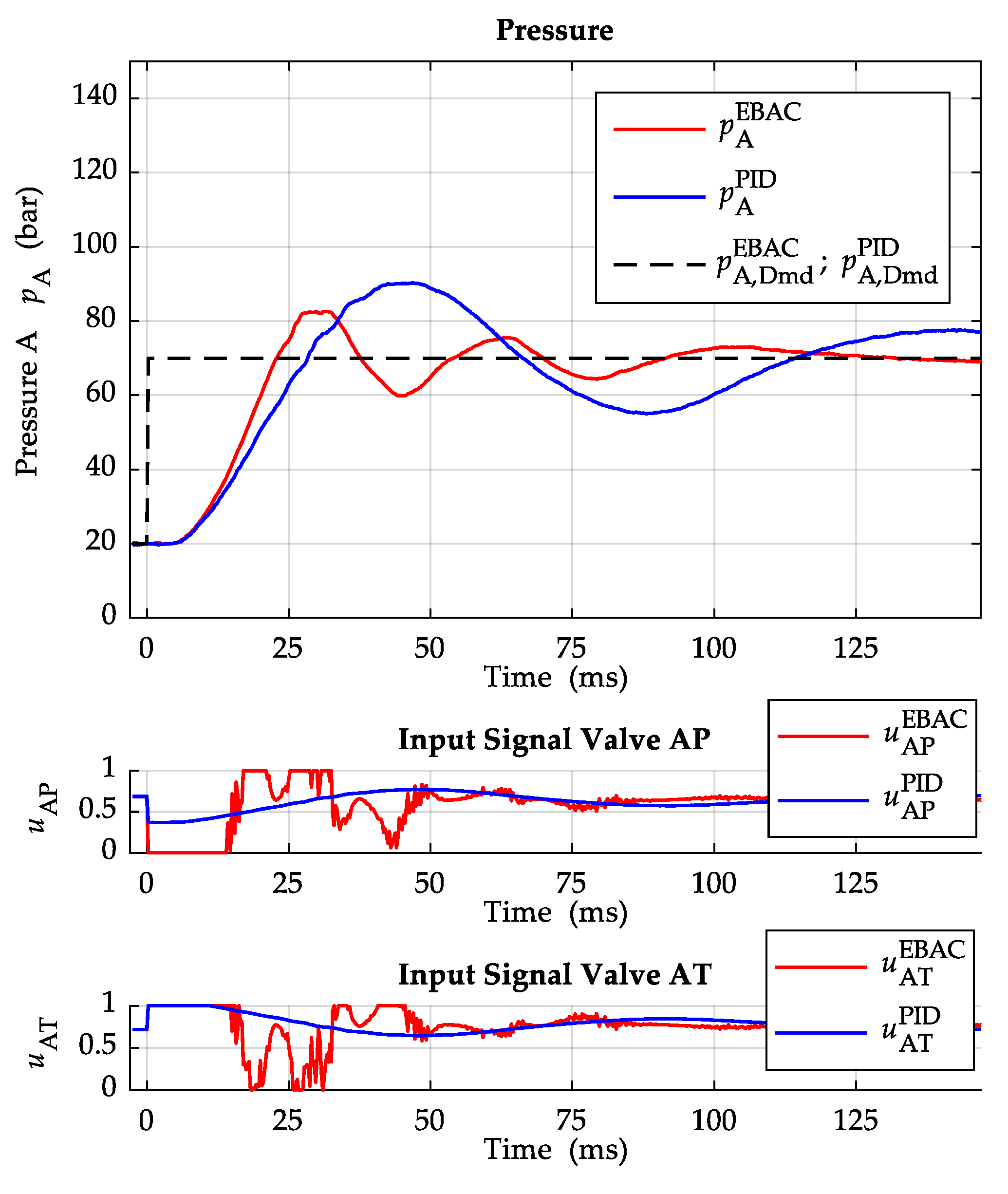
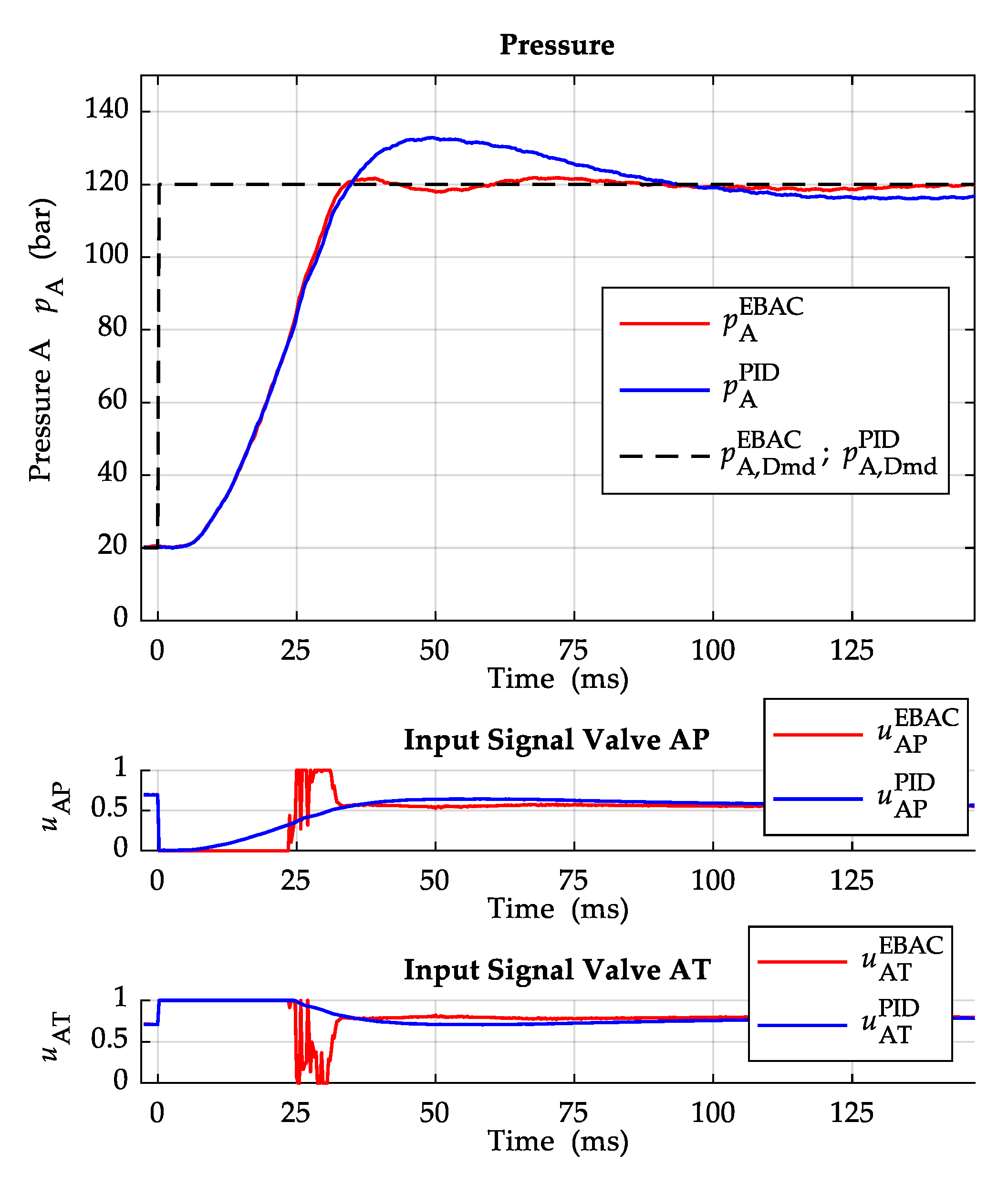
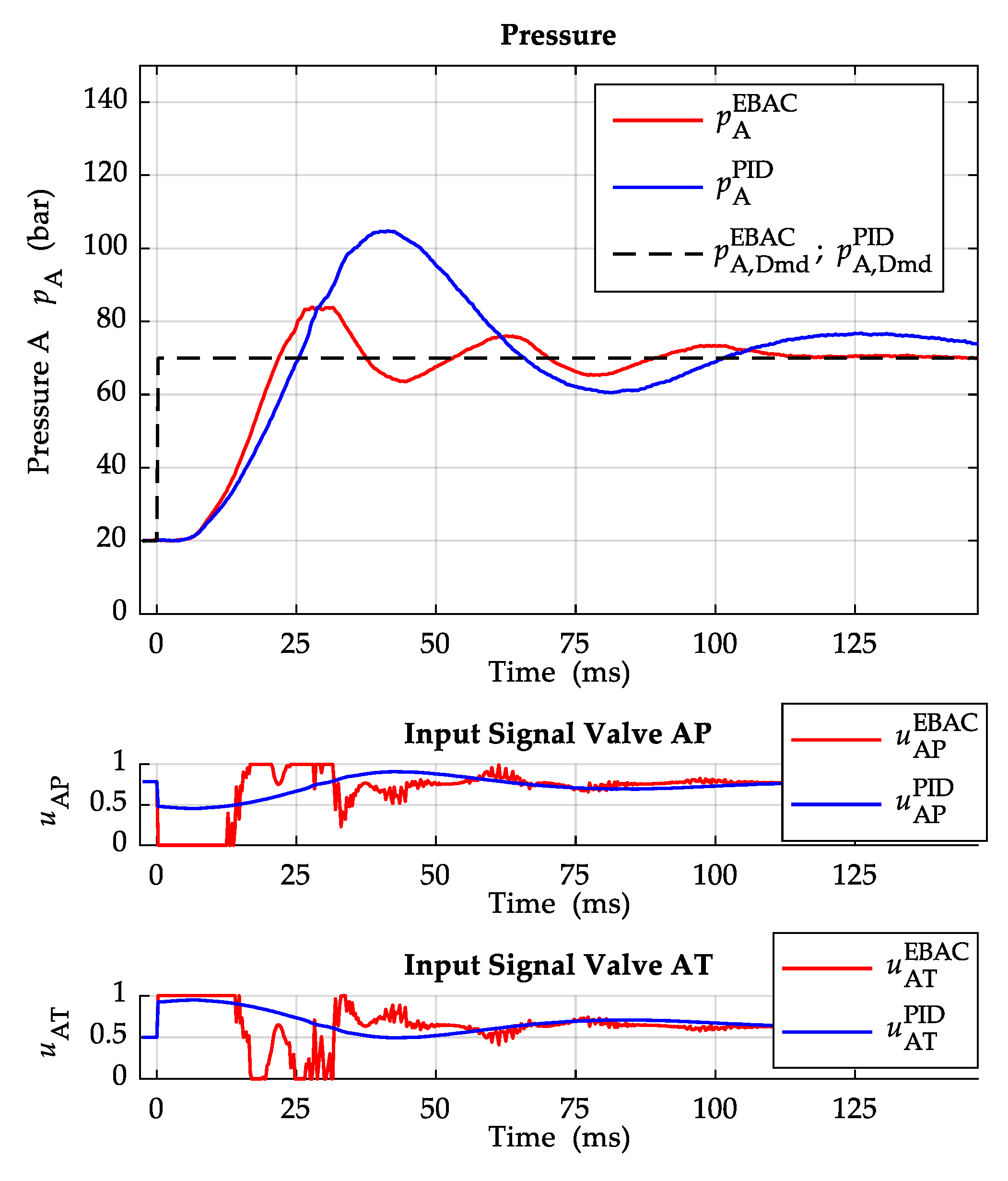
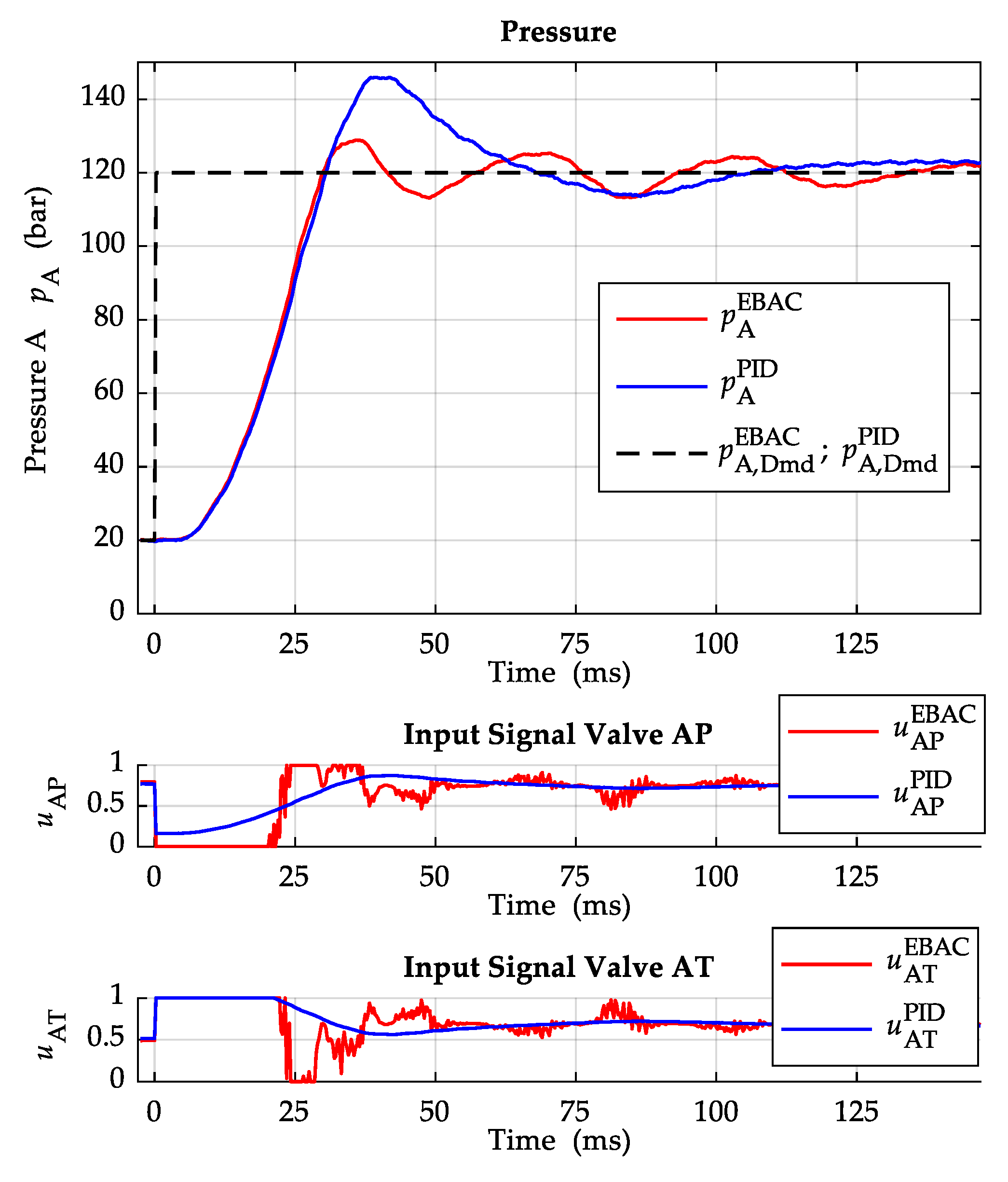
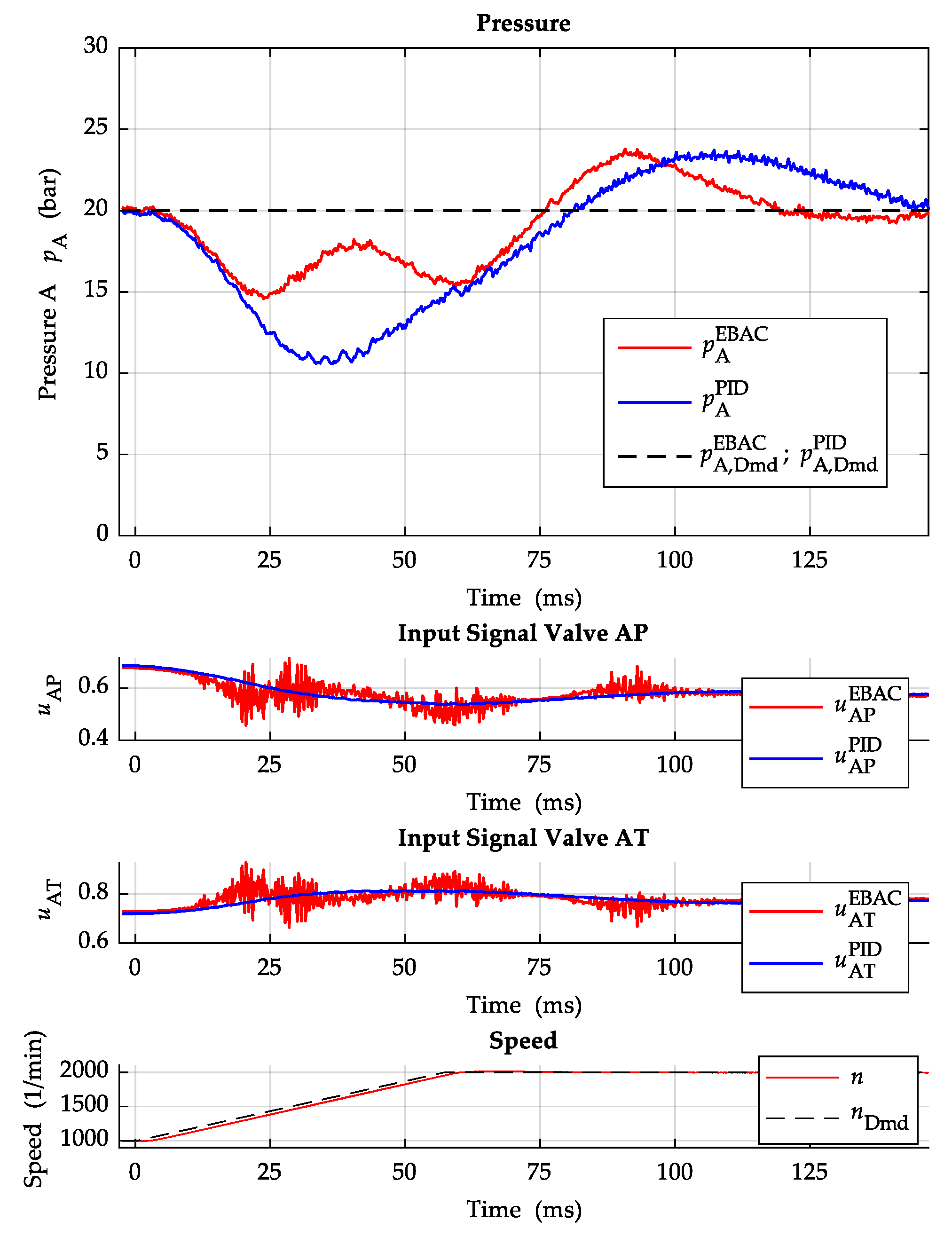
3.1. Control Performance
3.2. Test Cycle
4. Discussion
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Pietrzyk, T. Entwicklung Einer Hochdrehzahl-Innenzahnradpumpe für die Elektrifizierung Mobiler Anwendungen am Beispiel Einer Autarken Dezentralen Elektro-Hydraulischen Achse, 1st ed.; Reihe Fluidtechnik; Shaker: Düren, Germany, 2022; Volume 109. [Google Scholar]
- Casoli, P.; Scolari, F.; Minav, T.; Rundo, M. Comparative Energy Analysis of a Load Sensing System and a Zonal Hydraulics for a 9-Tonne Excavator. Actuators 2020, 9, 39. [Google Scholar] [CrossRef]
- Speicher, T. Methoden zur Auslegung und Effizienzbewertung von drehzahlvariablen Zahnradpumpenaggregaten unter Berücksichtigung von Systemwechselwirkungen. Ph.D. Thesis, Technischen Universität, Kaiserslautern, Germany, 2021. [Google Scholar]
- Gebhardt, N.; Weber, J. Hydraulik—Fluid-Mechatronik; Springer: Berlin/Heidelberg, Germany, 2020. [Google Scholar] [CrossRef]
- Chmiel, M. Drehzahlvariable Pumpenantriebe Halbieren Energiebedarf von Abkantpressen. MM MaschinenMarkt, 26 October 2010. [Google Scholar]
- Pietrzyk, T.; Roth, D.; Schmitz, K.; Jacobs, G. Design study of a high speed power unit for electro hydraulic actuators (EHA) in mobile applications. In Proceedings of the 11th International Fluid Power Conference, Aachen, Germany, 19–21 March 2018. [Google Scholar] [CrossRef]
- Lovrec, D.; Kastrevc, M.; Ulaga, S. Electro-hydraulic load sensing with a speed-controlled hydraulic supply system on forming-machines. Int. J. Adv. Manuf. Technol. 2009, 41, 1066–1075. [Google Scholar] [CrossRef]
- Lee, S.; Li, P.Y. A Hardware-In-The-Loop (HIL) Testbed for Hydraulic Transformers Research. In Fluid Power in the Digital Age: Proceedings of the 15th Scandinavian International Conference on Fluid Power, SICFP’17, Linköping, Sweden, 7–9 June 2017; Krus, P., Ericson, L., Sethson, M., Eds.; Linköping University Electronic Press: Linköping, Sweden, 2017. [Google Scholar]
- Yao, B.; Liu, S. Energy-saving control of hydraulic systems with novel programmable valves. In Proceedings of the 4th World Congress on Intelligent Control and Automation (Cat. No.02EX527), Shanghai, China, 10–14 June 2002; Volume 4, pp. 3219–3223. [Google Scholar] [CrossRef]
- Lyu, L.; Chen, Z.; Yao, B. Energy Saving Motion Control of Independent Metering Valves and Pump Combined Hydraulic System. IEEE/ASME Trans. Mechatron. 2019, 24, 1909–1920. [Google Scholar] [CrossRef]
- Abuowda, K.; Okhotnikov, I.; Noroozi, S.; Godfrey, P.; Dupac, M. A review of electrohydraulic independent metering technology. ISA Trans. 2020, 98, 364–381. [Google Scholar] [CrossRef] [PubMed]
- Kolks, G.; Weber, J. Getrennte Steuerkanten für den Einsatz in stationärhydraulischen Antrieben. O+P Fluidtechnik, 13 June 2018; 42–51. [Google Scholar]
- Edge, K.A. The control of fluid power systems-responding to the challenges. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 1997, 211, 91–110. [Google Scholar] [CrossRef]
- Jelali, M. Hydraulic Servo-systems: Modelling, Identification and Control; Advances in Industrial Control Series; Springer: London, UK, 2003. [Google Scholar] [CrossRef]
- Merritt, H.E. Hydraulic Control Systems; John Wiley and Sons: Hoboken, NJ, USA, 1967. [Google Scholar]
- Manring, N.D.; Fales, R.C. Hydraulic Control Systems, 2nd ed.; Wiley: Hoboken, NJ, USA, 2020. [Google Scholar]
- Liermann, M. Pid Tuning Rule for Pressure Control Applications. Int. J. Fluid Power 2013, 14, 7–15. [Google Scholar] [CrossRef]
- Song, K.Y.; Gupta, M.M.; Jena, D.; Subudhi, B. Design of a robust neuro-controller for complex dynamic systems. In Proceedings of the 2009 Annual Meeting of the North American Fuzzy Information Processing Society (NAFIPS 2009), Cincinnati, OH, USA, 14–17 June 2009; pp. 1–5. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Controller | |||
|---|---|---|---|
| E-BAC | |||
| PID | 0.0056 | 0.254 | 0.00003 |
| Gain Function | b | ||
|---|---|---|---|
| 0.06 | 0.006 | 200 | |
| 0.15 | — | 400 | |
| 0.0004 | — | 100 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pfizenmaier, M.; Pippes, T.; Bohr, A.; Falkenstein, J. Load Emulation with Independent Metering for a Pump Test Bench. Actuators 2023, 12, 413. https://doi.org/10.3390/act12110413
Pfizenmaier M, Pippes T, Bohr A, Falkenstein J. Load Emulation with Independent Metering for a Pump Test Bench. Actuators. 2023; 12(11):413. https://doi.org/10.3390/act12110413
Chicago/Turabian StylePfizenmaier, Max, Thomas Pippes, Artur Bohr, and Jens Falkenstein. 2023. "Load Emulation with Independent Metering for a Pump Test Bench" Actuators 12, no. 11: 413. https://doi.org/10.3390/act12110413
APA StylePfizenmaier, M., Pippes, T., Bohr, A., & Falkenstein, J. (2023). Load Emulation with Independent Metering for a Pump Test Bench. Actuators, 12(11), 413. https://doi.org/10.3390/act12110413