
Soft End Effector Using Spring Roll Dielectric Elastomer Actuators



Abstract
:1. Introduction
2. Modelling and Experiment
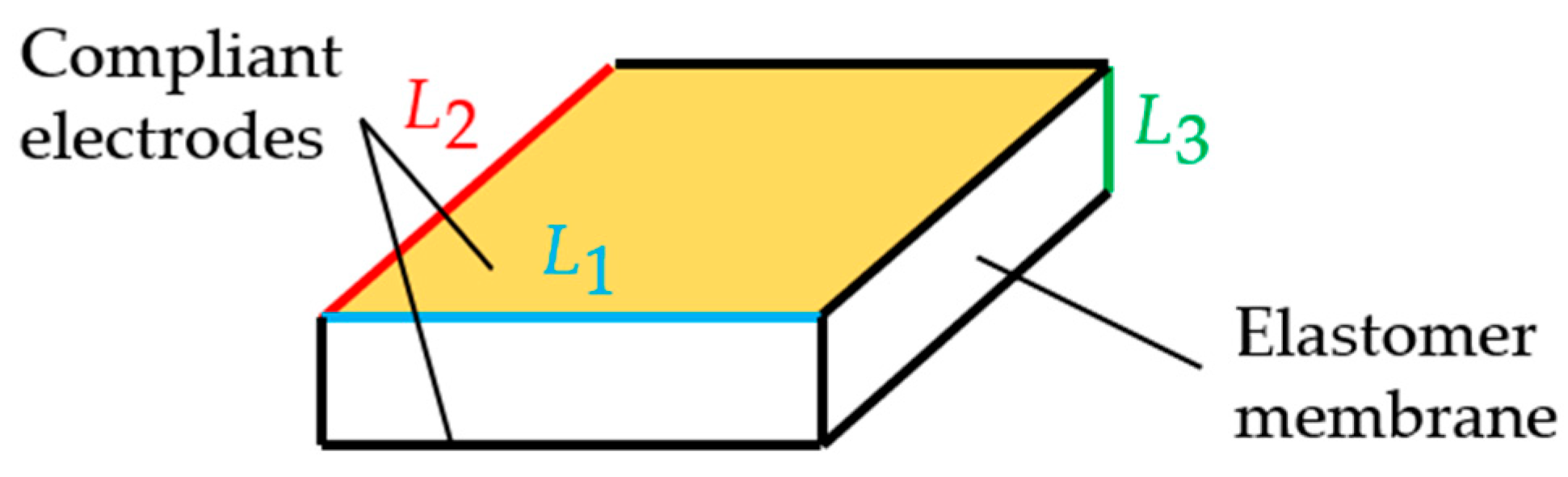
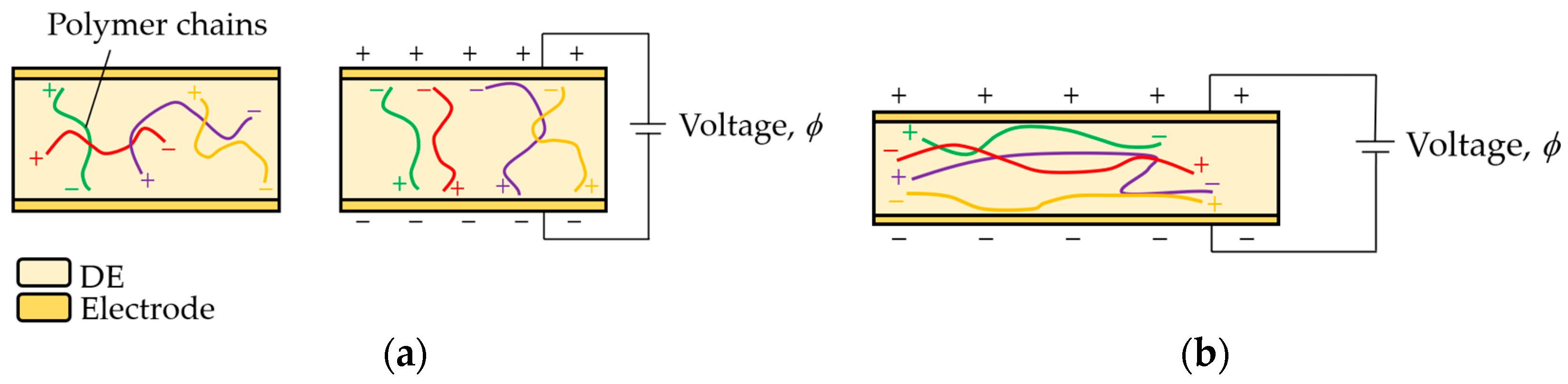
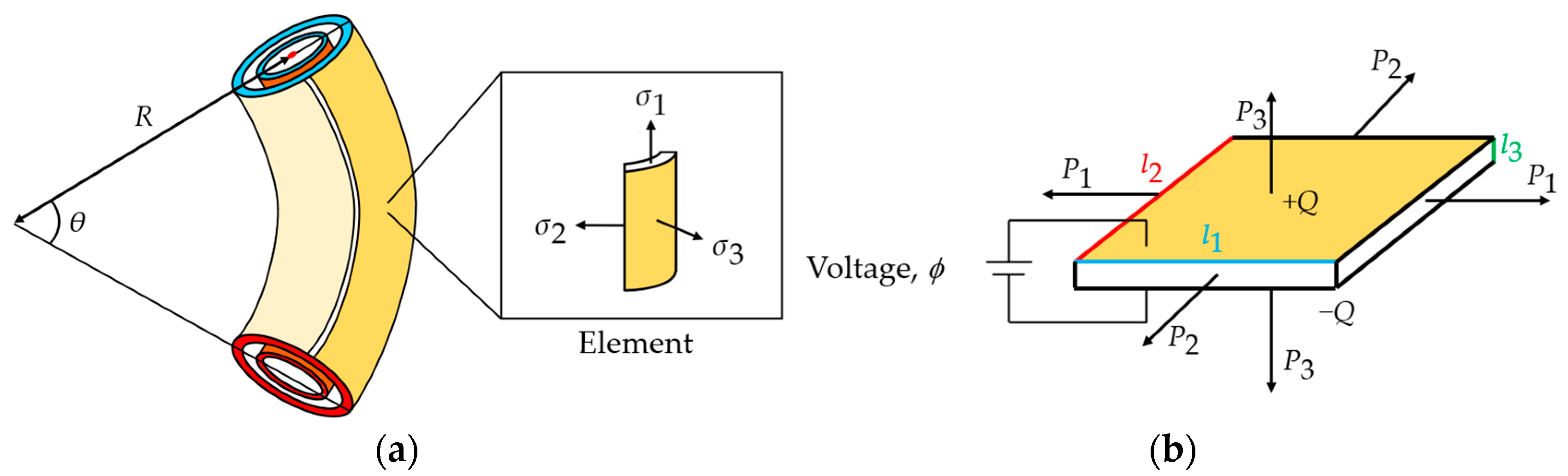
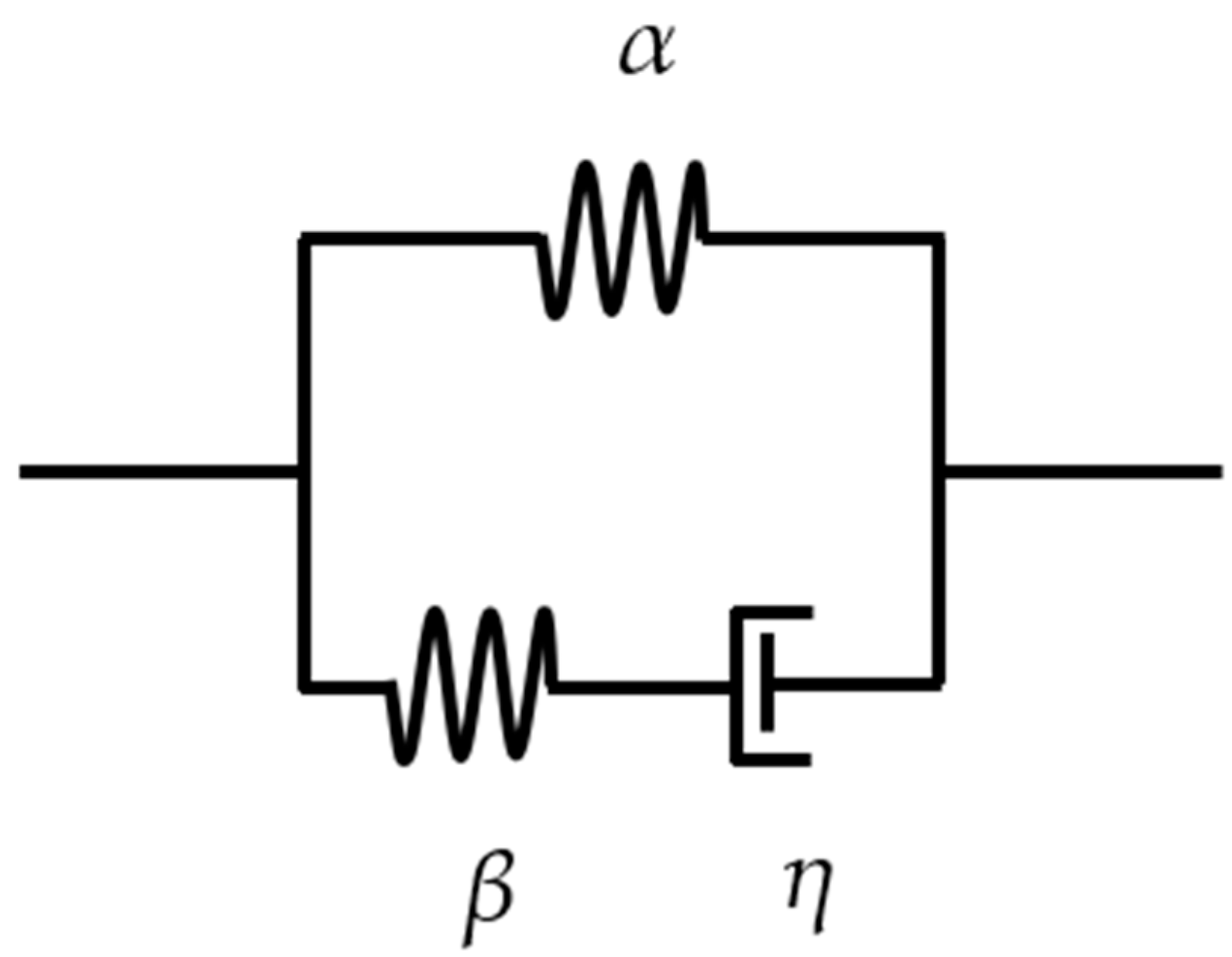
2.1. Equations of State for DEAs
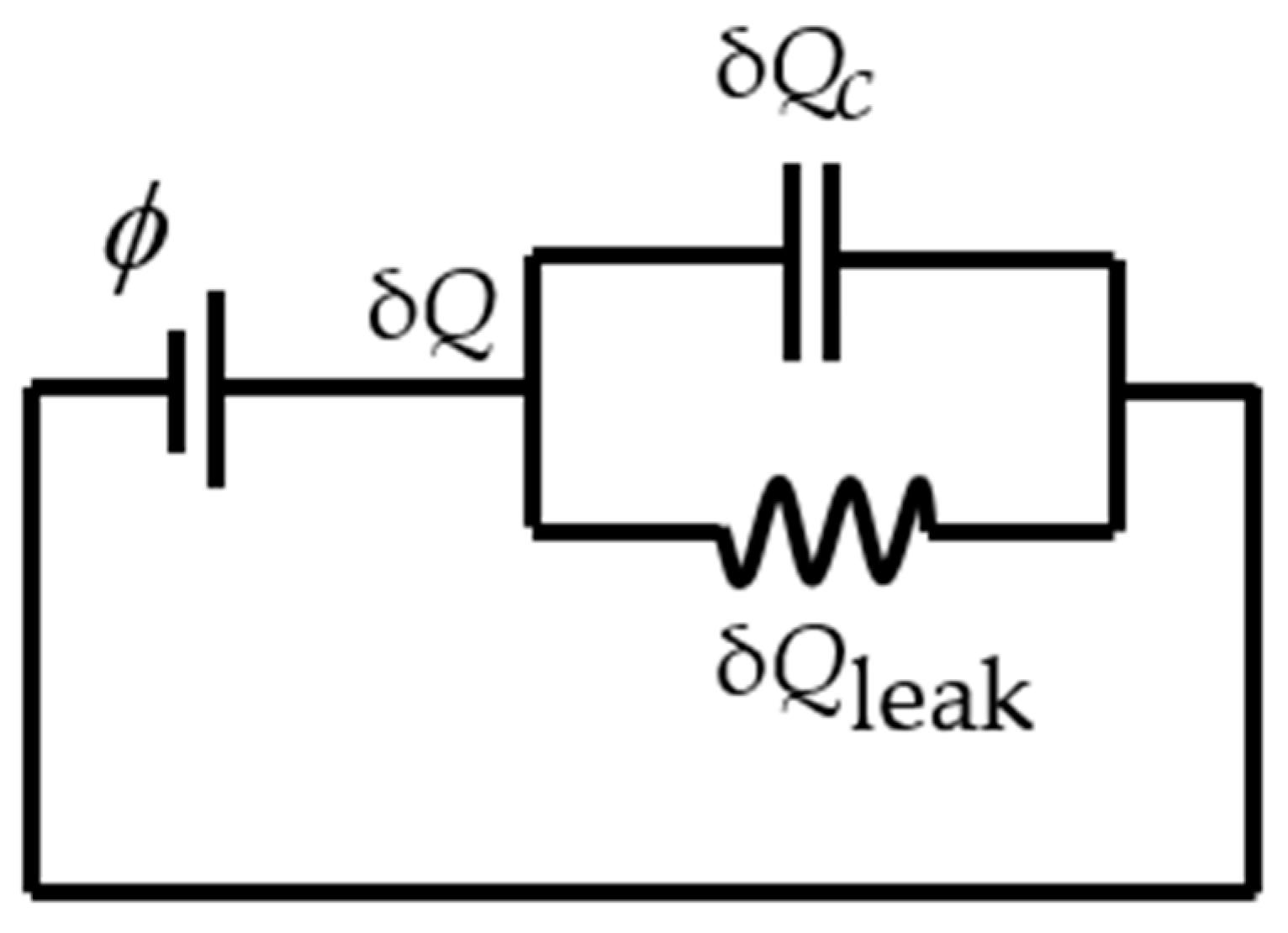
2.2. Charge Control and Leakage Current
3. Method
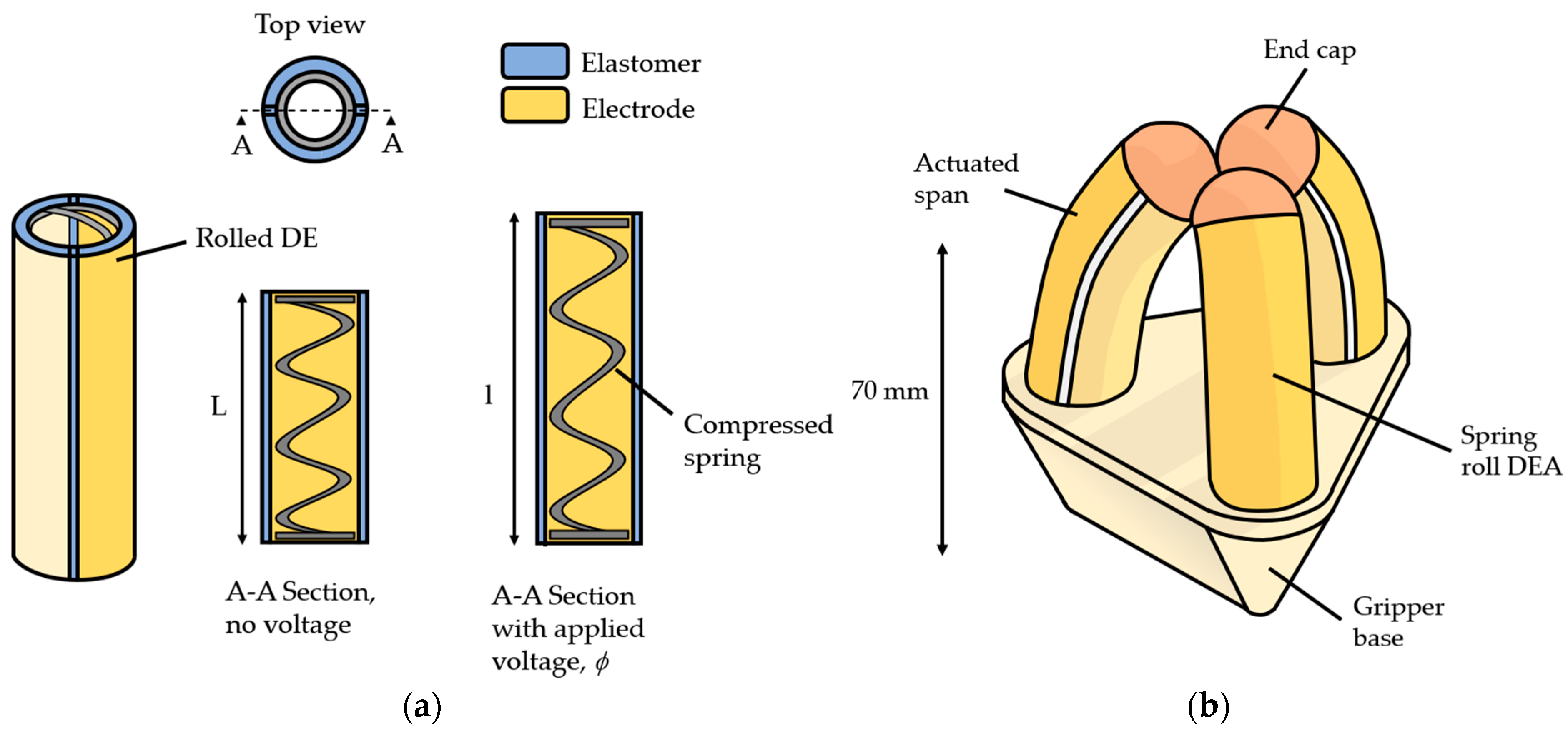
3.1. Fabrication of Spring Rolls
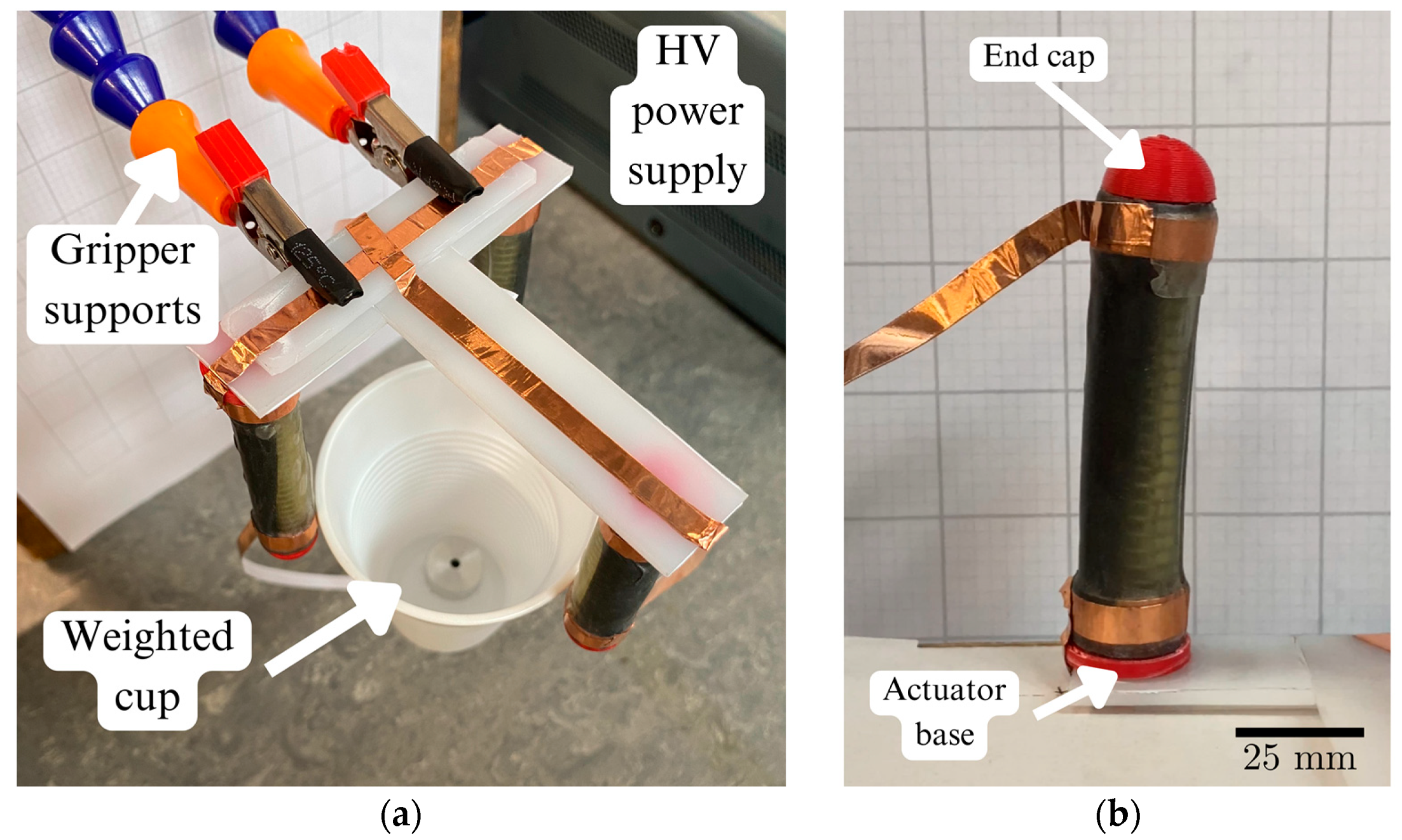
3.2. Experimental Setup
4. Results
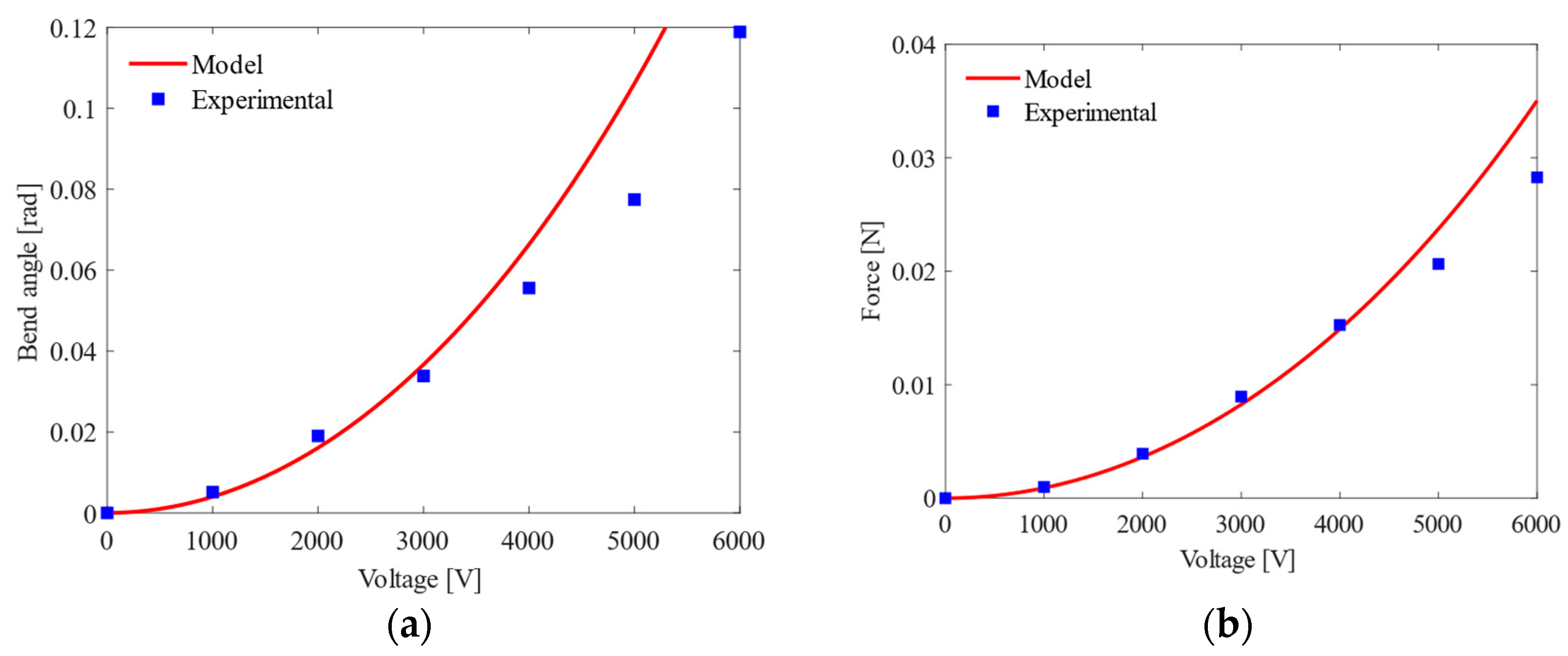
4.1. Static Response
4.2. Dielectric Properties of Membrane
4.3. Dynamic Response
5. Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Brochu, P.; Pei, Q. Advances in Dielectric Elastomers for Actuators and Artificial Muscles. Macromol. Rapid Commun. 2009, 31, 10–36. [Google Scholar] [CrossRef] [PubMed]
- Chen, Y.; Xu, S.; Ren, Z.; Chirarattananon, P. Collision Resilient Insect-Scale Soft-Actuated Aerial Robots With High Agility. IEEE Trans. Robot. 2021, 37, 1752–1764. [Google Scholar] [CrossRef]
- Pelrine, R.; Kornbluh, R.; Pei, Q.; Joseph, J. High-Speed Electrically Actuated Elastomers with Strain Greater Than 100%. Science 2000, 287, 836–839. [Google Scholar] [CrossRef]
- Pelrine, R.; Kornbluh, R.; Kofod, G. High-Strain Actuator Materials Based on Dielectric Elastomers. Adv. Mater. 2000, 12, 1223–1225. [Google Scholar] [CrossRef]
- Romasanta, L.; Lopez-Manchado, M.; Verdejo, R. Increasing the performance of dielectric elastomer actuators: A review from the materials perspective. Prog. Polym. Sci. 2015, 51, 188–211. [Google Scholar] [CrossRef]
- Zhang, J.; Chen, H.; Tang, L.; Li, B.; Sheng, J.; Liu, L. Modelling of spring roll actuators based on viscoelastic dielectric elastomers. Appl. Phys. A 2015, 119, 825–835. [Google Scholar] [CrossRef]
- Lau, G.-K.; Shiau, L.-L.; Chua, S.-L. Effects of Thinner Compliant Electrodes on Self-Clearability of Dielectric Elastomer Actuators. Actuators 2020, 9, 121. [Google Scholar] [CrossRef]
- Lochmatter, P.; Kovacs, G.; Wissler, M. Characterization of dielectric elastomer actuators based on a visco-hyperelastic film model. Smart Mater. Struct. 2007, 16, 477–486. [Google Scholar] [CrossRef]
- Zhu, F.B.; Zhang, C.L.; Qian, J.; Chen, W.Q. Mechanics of dielectric elastomers: Materials, structures, and devices. J. Zhejiang Univ.-Sci. A (Appl. Phys. Eng.) 2016, 17, 1–21. [Google Scholar]
- Zhang, J.; Chen, H.; Li, B.; McCoul, D.; Pei, Q. Coupled nonlinear oscillation and stability evolution of viscoelastic dielectric elastomers. Soft Matter 2015, 11, 7483–7493. [Google Scholar] [CrossRef]
- Tran, D.Q.; Li, J.; Xuan, F.; Xiao, T. Viscoelastic effects on the actuation performance of a dielectric elastomer actuator under different equal, un-equal biaxial pre-stretches. Mater. Res. Express 2018, 5, 065303. [Google Scholar] [CrossRef]
- Lai, W. Characteristics of Dielectric Elastomers and Fabrication of Dielectric Elastomer Actuators for Artificial Muscle Application; Iowa State University: Ames, IA, USA, 2011. [Google Scholar]
- Britannica. Dielectrics, Polarization, and Electric Dipole Moment. Britannica. 2023. Available online: https://www.britannica.com/science/electricity/Dielectrics-polarization-and-electric-dipole-moment (accessed on 7 February 2023).
- Britannica. Molecular Structure and Charge Distribution. Britannica. 2023. Available online: https://www.britannica.com/science/liquid-state-of-matter/Molecular-structure-and-charge-distribution-moment (accessed on 7 February 2023).
- Löwe, C.; Zhang, X.; Kovacs, G. Dielectric Elastomers in Actuator Technology. Adv. Eng. Mater. 2005, 7, 361–367. [Google Scholar] [CrossRef]
- Wang, H.; Li, L.; Zhu, Y.; Yang, W. Analysis and application of a rolled dielectric elastomer actuator with two degrees of freedom. Smart Mater. Struct. 2016, 25, 125008. [Google Scholar] [CrossRef]
- Li, L.; Godaba, H.; Ren, H.; Zhu, J. Bioinspired Soft Actuators for Eyeball Motions in Humanoid Robots. IEEE/ASME Trans. Mechatronics 2018, 24, 100–108. [Google Scholar] [CrossRef]
- Pei, Q.; Rosenthal, M.; Stanford, S.; Prahlad, H.; Pelrine, R. Multiple-degrees-of-freedom electroelastomer roll actuators. Smart Mater. Struct. 2004, 13, N86–N92. [Google Scholar] [CrossRef]
- Heng, K.-R.; Ahmed, A.S.; Shrestha, M.; Lau, G.-K. Strong dielectric-elastomer grippers with tension arch flexures. In Proceedings of the Electroactive Polymer Actuators and Devices (EAPAD), Portland, OR, USA, 17 April 2017; Volume 10163, p. 101631Z. [Google Scholar]
- van Kessel, R.; Bauer, P.; Ferreira, J.A. Electrical modeling of cylindrical dielectric elastomer transducers. Smart Mater. Struct. 2021, 30, 035021. [Google Scholar] [CrossRef]
- Zhao, X.; Suo, Z. Electrostriction in elastic dielectrics undergoing large deformation. J. Appl. Phys. 2008, 104, 123530. [Google Scholar] [CrossRef]
- Huang, R.; Suo, Z. Electromechanical phase transition in dielectric elastomers. Proc. R. Soc. 2011, 468, 1014–1040. [Google Scholar] [CrossRef]
- Goulbourne, N.; Mockensturm, E.; Frecker, M. A Nonlinear Model for Dielectric Elastomer Membranes. J. Appl. Mech. 2005, 72, 899–906. [Google Scholar] [CrossRef]
- Yang, E.; Frecker, M.; Mockensturm, E. Viscoelastics model of dielectric elasmtomer membranes. In Proceedings of the Smart Structures and Materials 2005: Electroactive Polymer Actuators and Devices (EAPAD), San Diego, CA, USA, 6 May 2005; Volume 5759, pp. 82–92. [Google Scholar]
- Lu, T.; Huang, J.; Jordi, C.; Kovacs, G.; Huang, R.; Clarkeb, D.R.; Suo, Z. Dielectric elastomer actuators under equal-biaxial forces, uniaxial forces, and uniaxial constraint of stiff fibers. Soft Matter 2012, 8, 6167–6173. [Google Scholar] [CrossRef]
- Foo, C.C.; Cai, S.; Koh, S.J.A.; Bauer, S.; Suo, Z. Model of dissipative dielectric elastomers. J. Appl. Phys. 2012, 111, 034102. [Google Scholar] [CrossRef]
- Teh, Y.S.; Koh, S.J.A. Giant continuously-tunable actuation of a dielectric elastomer ring actuator. Extreme Mech. Lett. 2016, 9, 195–203. [Google Scholar] [CrossRef]
- Zhang, J.; Chen, H.; Sheng, J.; Liu, L.; Li, B. Leakage current of a charge-controlled dielectric elastomer. In Proceedings of the Electroactive Polymer Actuators and Devices (EAPAD), San Diego, CA, USA, 10–13 March 2014; Volume 9056, pp. 1–10. [Google Scholar]
- McPherson, J.; Kim, A.S.J.; Mogul, H.; Rodriguez, J. Proposed universal relationship between dielectric breakdown and dielectric constant. In Proceedings of the Digest. International Electron Devices Meeting, San Francisco, CA, USA, 8–11 December 2002; Volume 1, pp. 633–636. [Google Scholar]
- Tan, Q.; Irwin, P.; Cao, Y. Advanced Dielectrics for Capacitors. Trans. Fundam. Mater. 2006, 126, 1153–1159. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Material Parameter | Value |
|---|---|
| 115 | |
| 70 | |
| 16,000 | |
| 45,000 | |
| 6 |
| Parameter | 2-DOF Roll (Version 1), 2004 [18] | 2-DOF Roll, 2016 [16] | This Work |
|---|---|---|---|
| Actuator mass | 29 g | - | 10 g |
| Actuator length | 68 mm | 40 mm | 70 mm |
| Dielectric elastomer (pre-stretch ratio) | VHB-4910 | VHB-4910 (3, 5) | VHB-F9473PC (1.03, 1) |
| Maximum operating voltage | 5.5 kV | 5 kV | 6 kV |
| Maximum stroke | - | 8.4 mm | - |
| Maximum bending angle | 60° | 75.3° | 6.8° |
| Maximum force | 1.68 N | 0.7 N | 0.03 N |
| No. of rolls | 20 | 14 | 10 |
| Dashpot fully extended | Yes | Yes | No |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lewis, H.; Pan, M. Soft End Effector Using Spring Roll Dielectric Elastomer Actuators. Actuators 2023, 12, 412. https://doi.org/10.3390/act12110412
Lewis H, Pan M. Soft End Effector Using Spring Roll Dielectric Elastomer Actuators. Actuators. 2023; 12(11):412. https://doi.org/10.3390/act12110412
Chicago/Turabian StyleLewis, Hamish, and Min Pan. 2023. "Soft End Effector Using Spring Roll Dielectric Elastomer Actuators" Actuators 12, no. 11: 412. https://doi.org/10.3390/act12110412
APA StyleLewis, H., & Pan, M. (2023). Soft End Effector Using Spring Roll Dielectric Elastomer Actuators. Actuators, 12(11), 412. https://doi.org/10.3390/act12110412