
A Review of EMI Research of High Power Density Motor Drive Systems for Electric Actuator




Abstract
:1. Introduction
2. The Trade-Off between High Power Density and EMC Design
2.1. Integrated Electric Motor Drives
2.2. Applications of Wide-Bandgap Semiconductors
3. EMI Modeling Methods
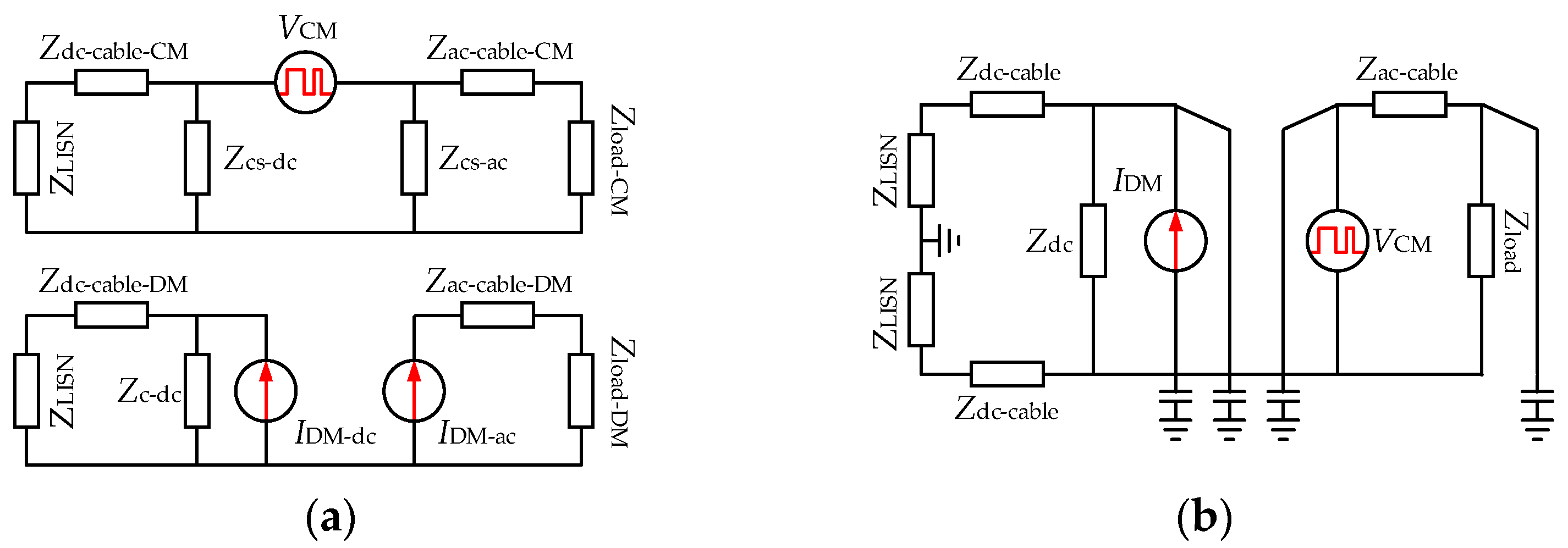
3.1. Conducted EMI Modeling
3.1.1. Time-Domain Modeling
3.1.2. Frequency-Domain Modeling
3.1.3. Behavioral Modeling
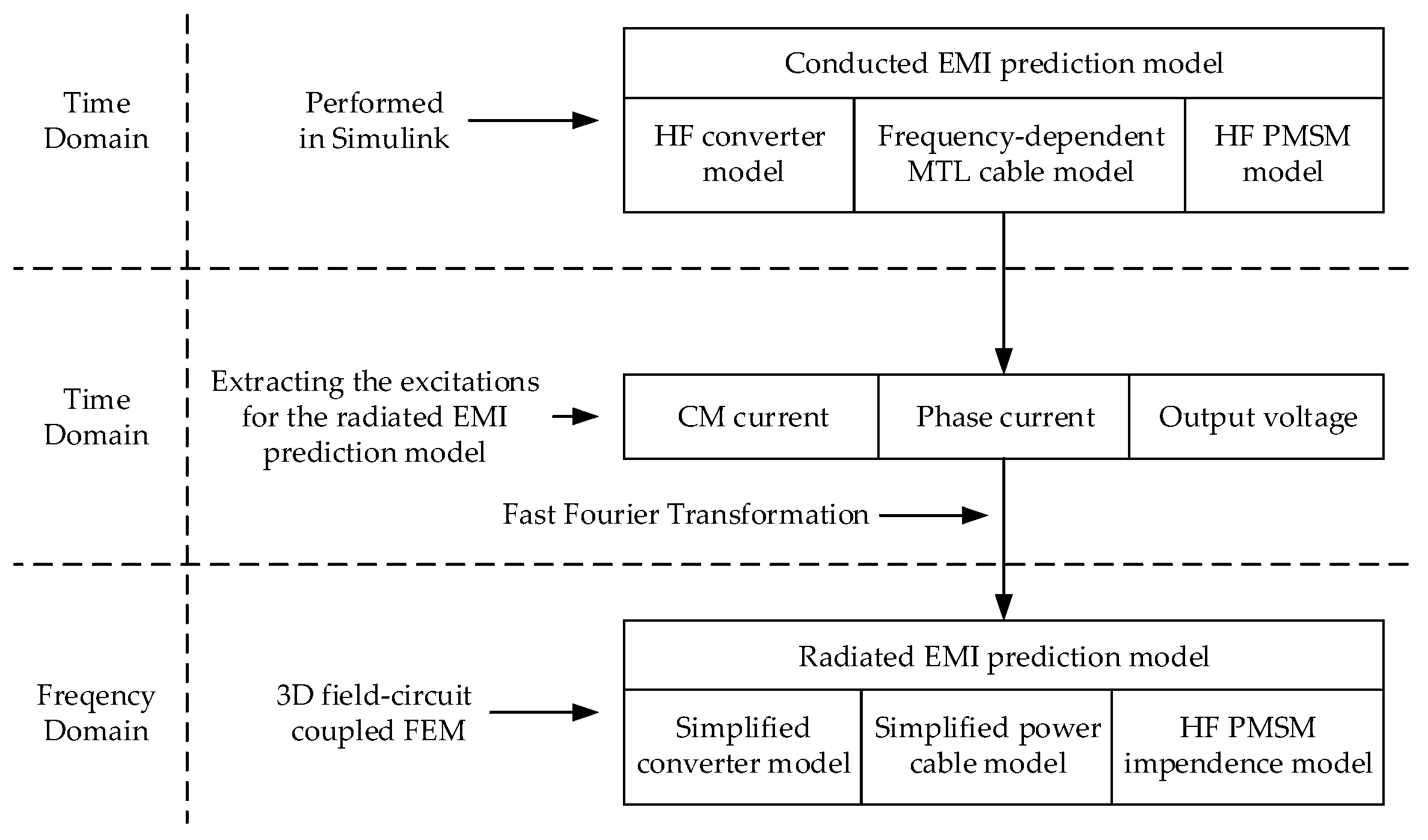
3.2. Radiated EMI Modeling
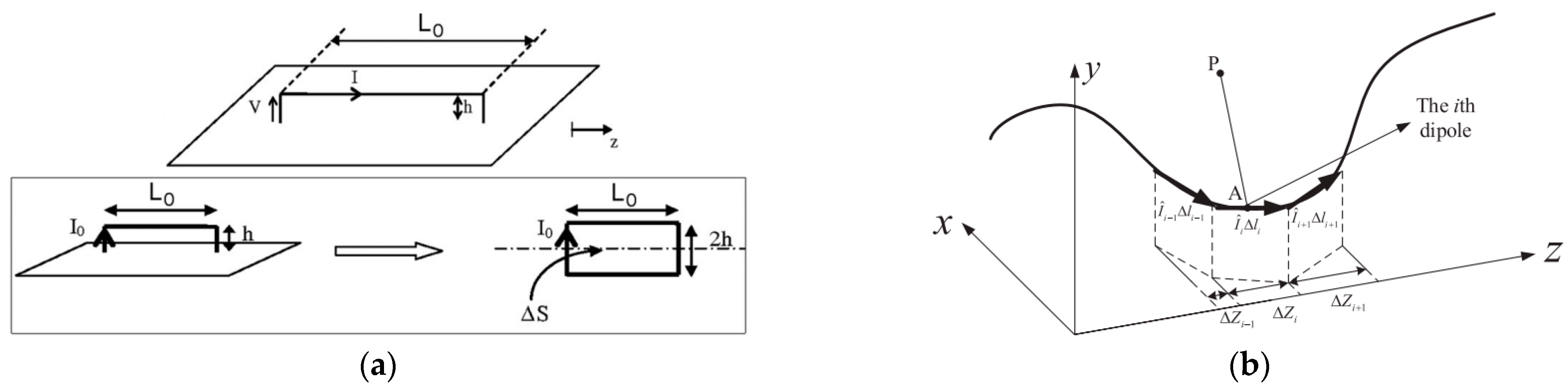
3.2.1. Radiated EMI Modeling of Cable
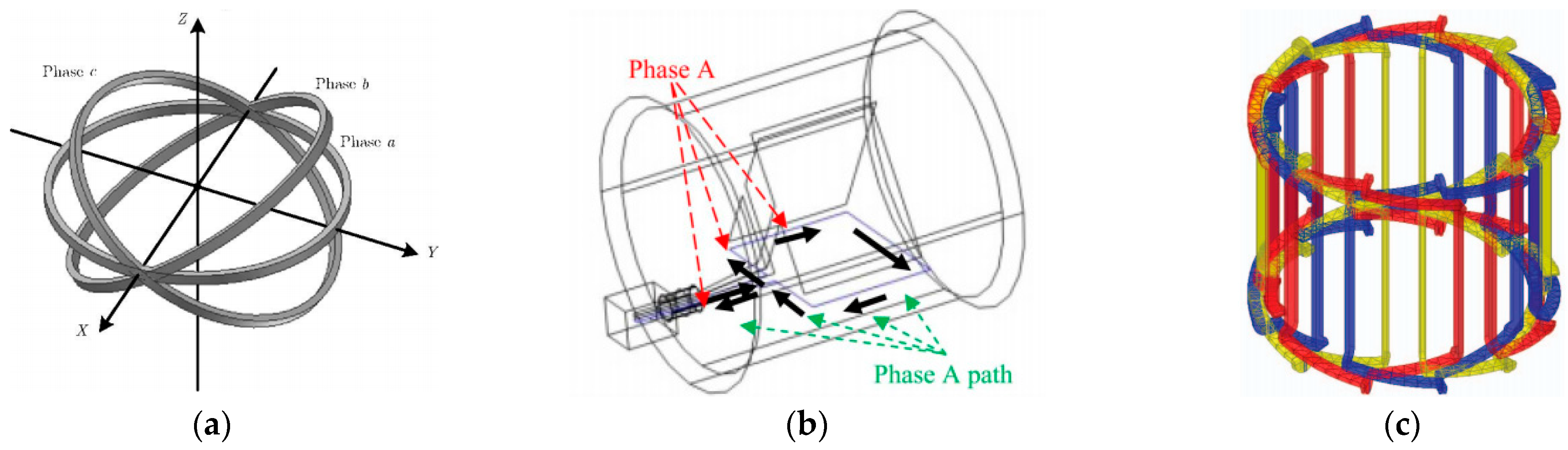
3.2.2. Radiated EMI Modeling of Motor
3.2.3. Radiated EMI Modeling of Inverter
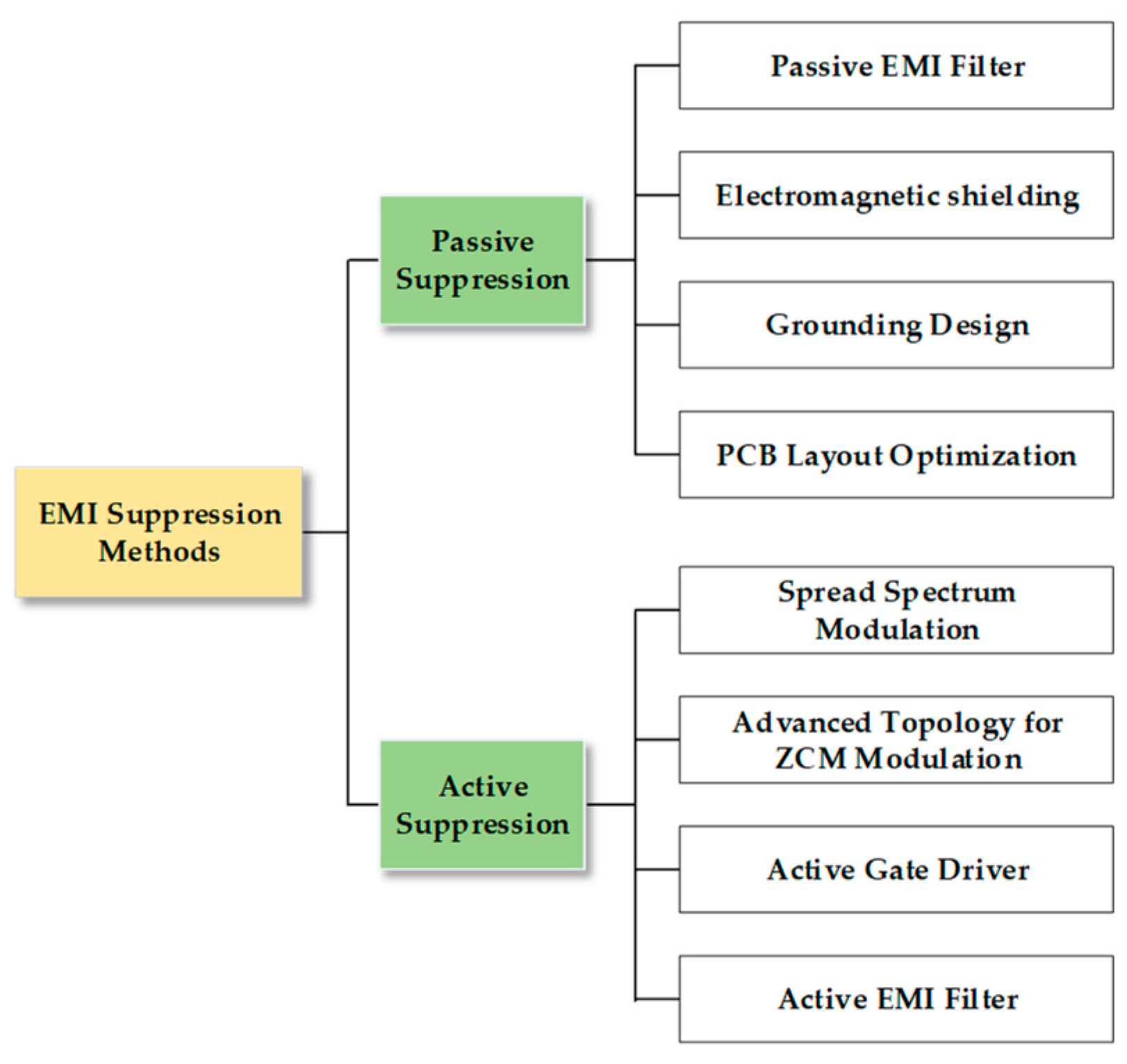
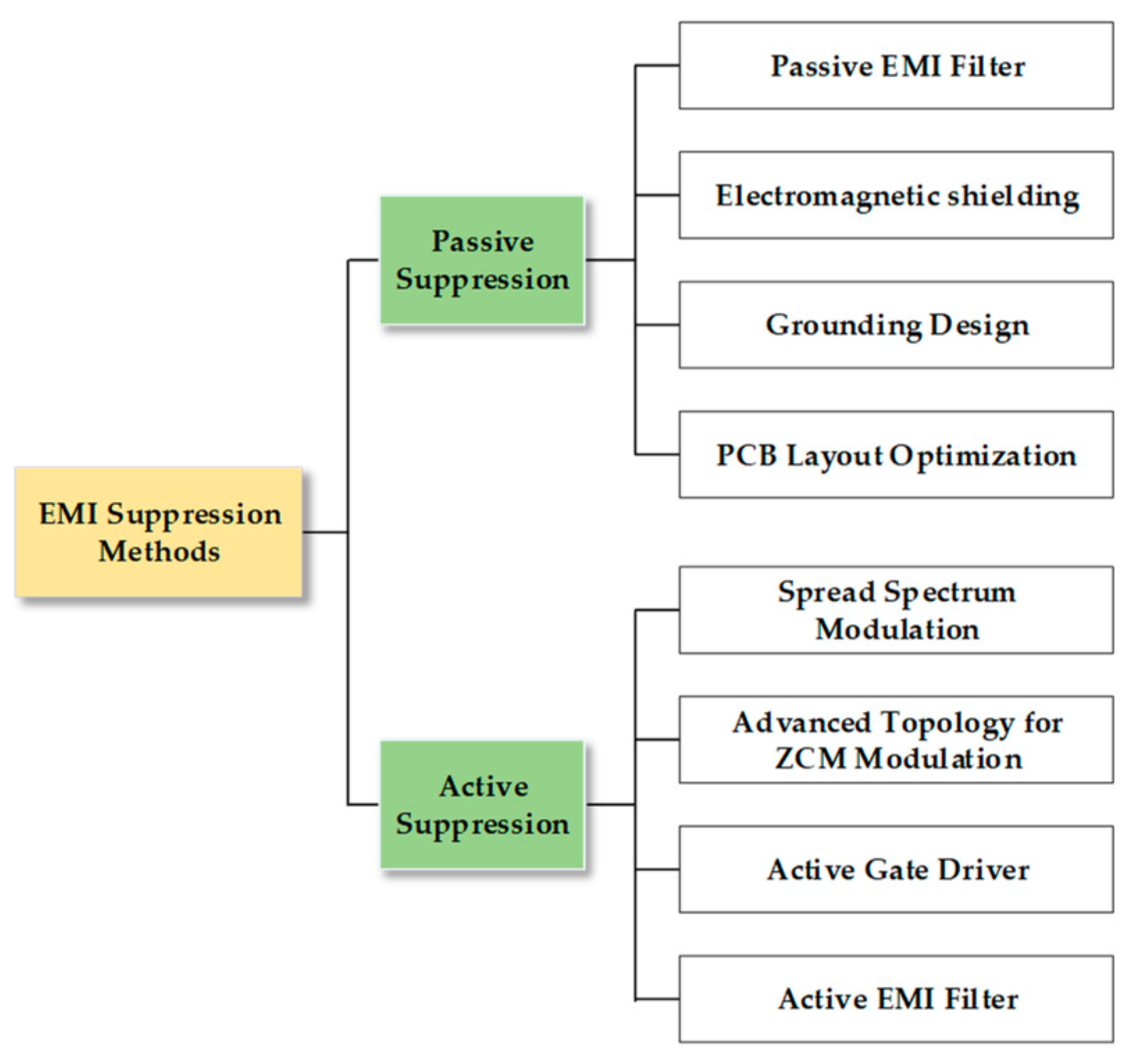
4. EMI Suppression Method
4.1. Passive Suppression
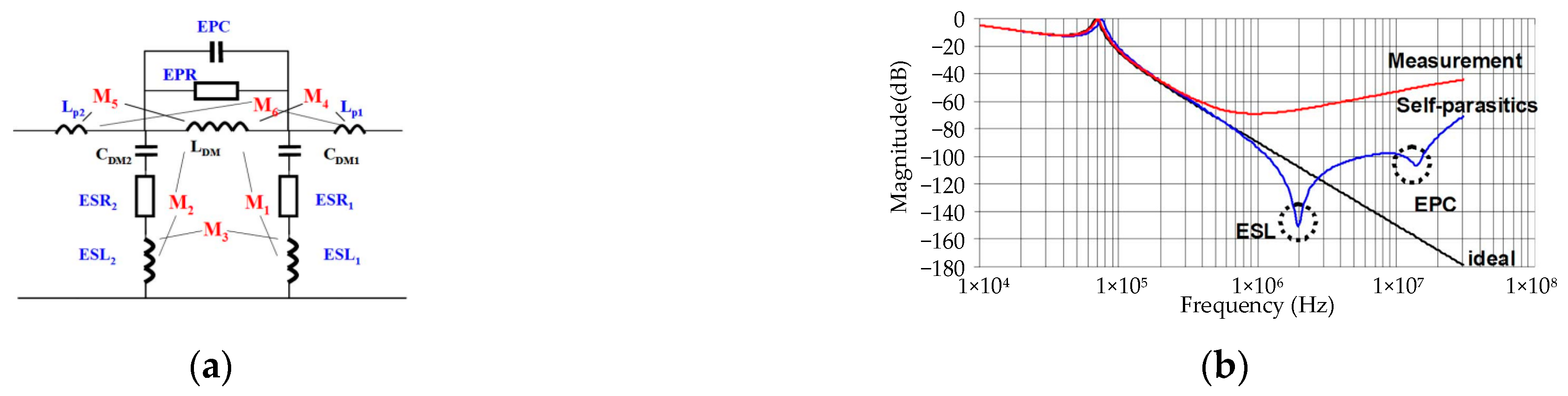
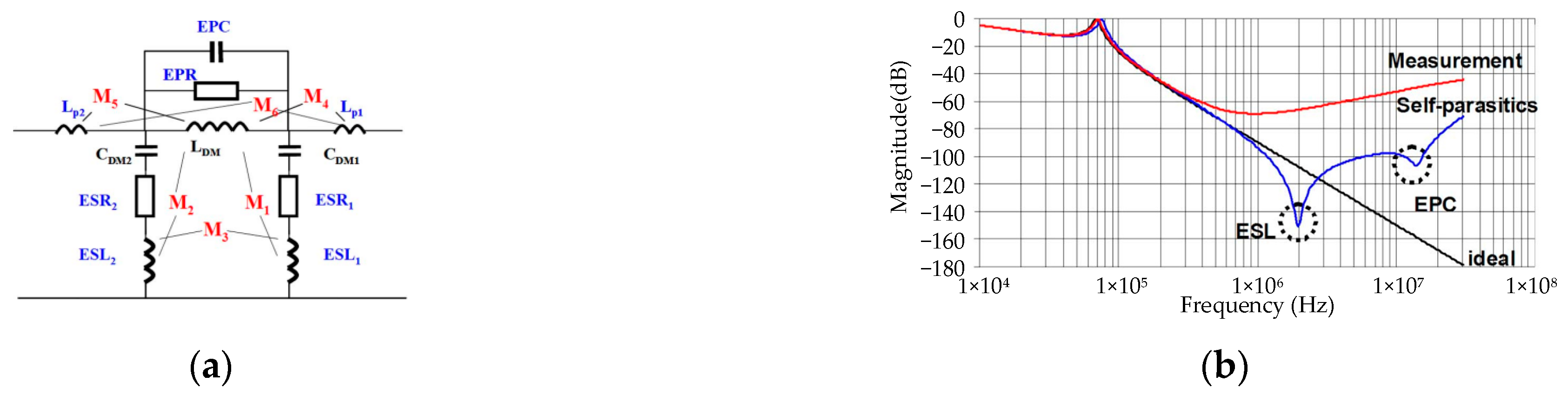
4.1.1. Optimization of High-Frequency Performance
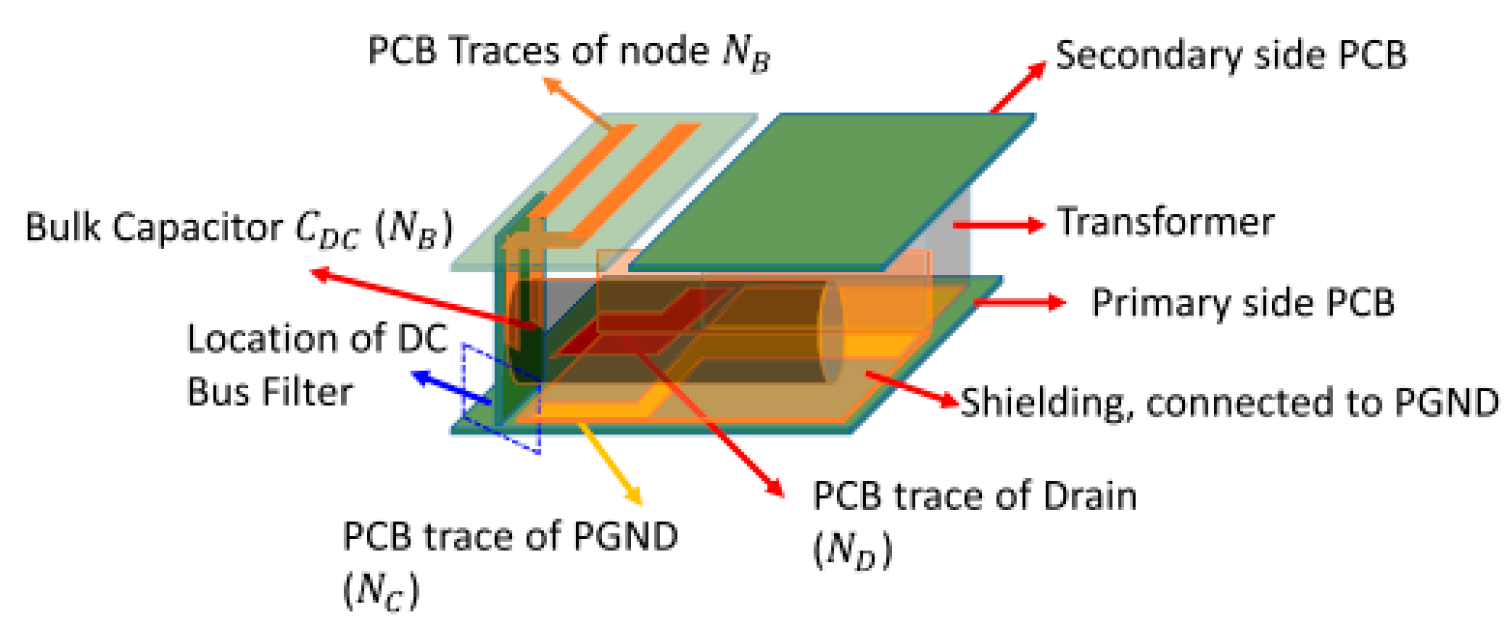
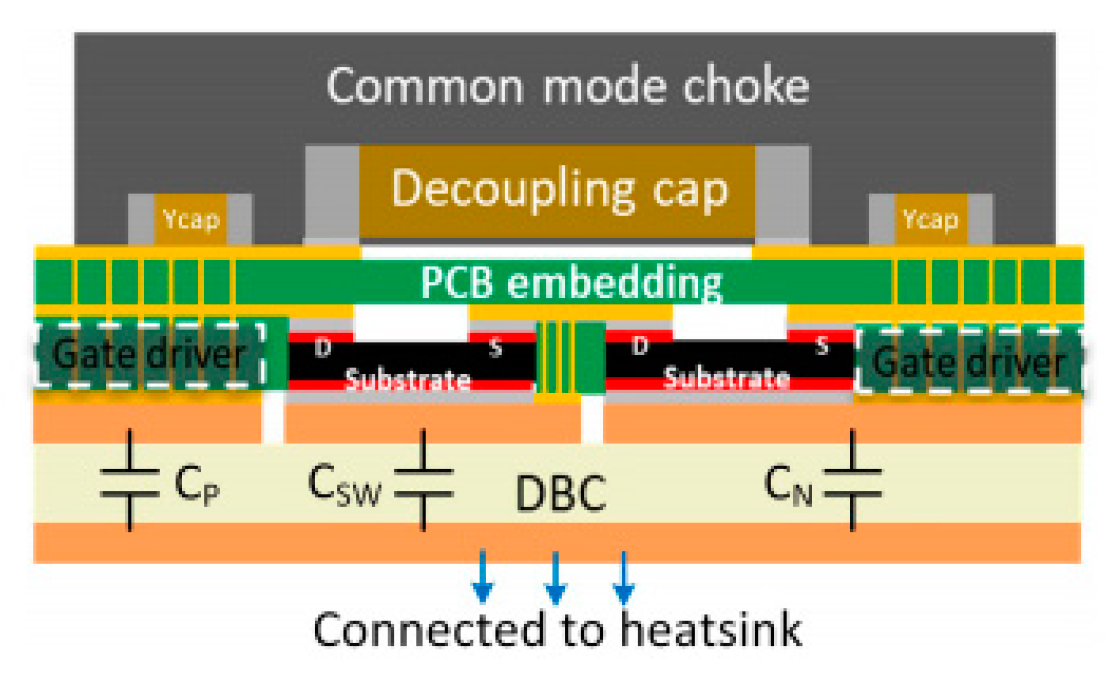
4.1.2. Optimization of Power Density
4.2. Active Suppression
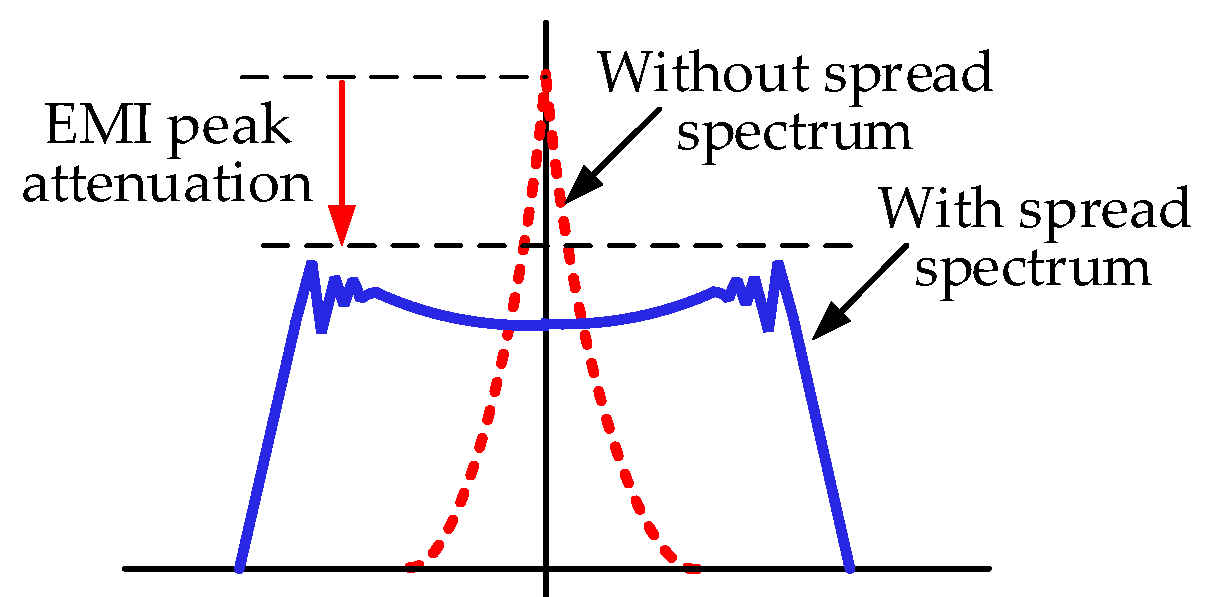
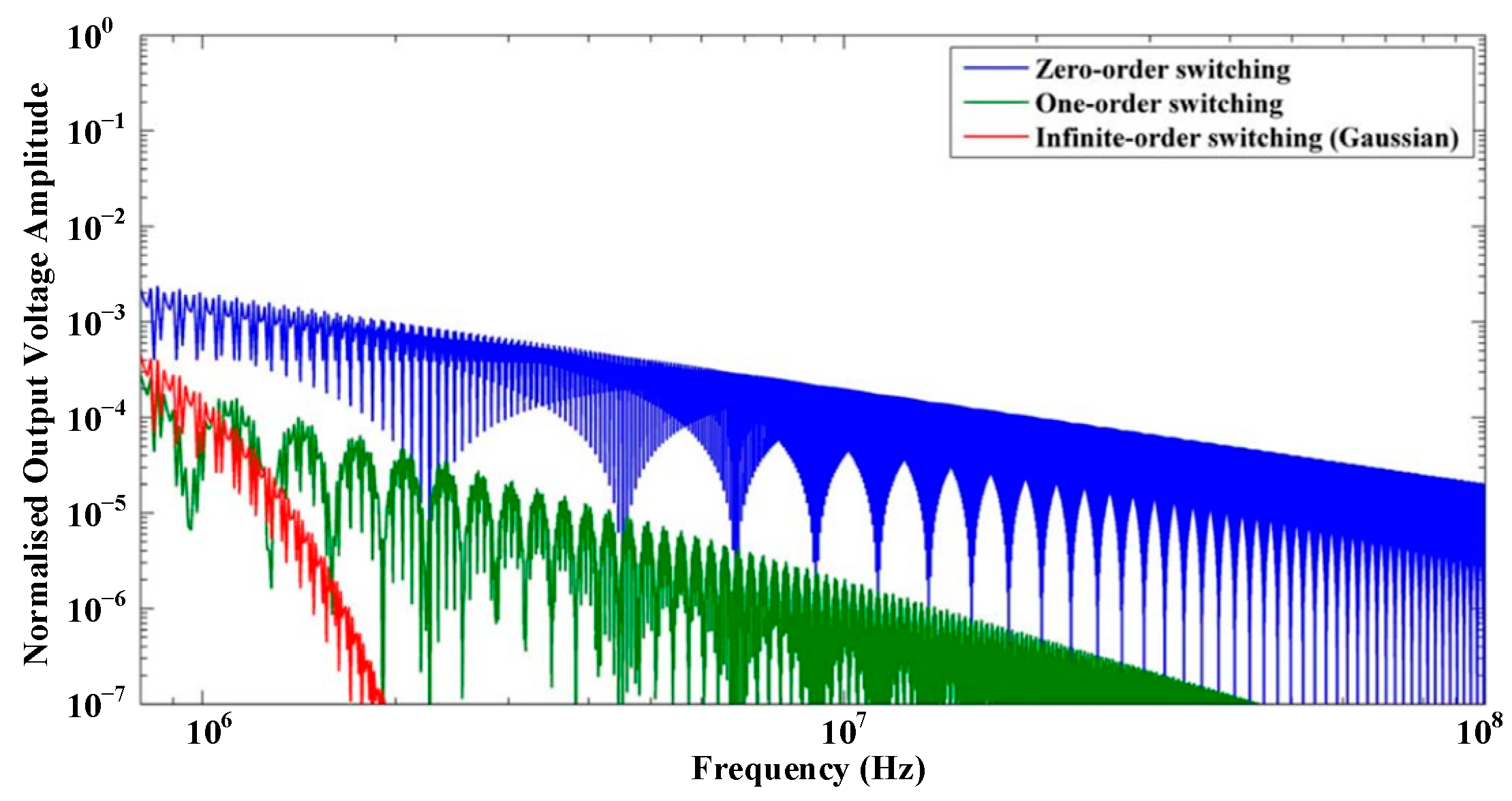
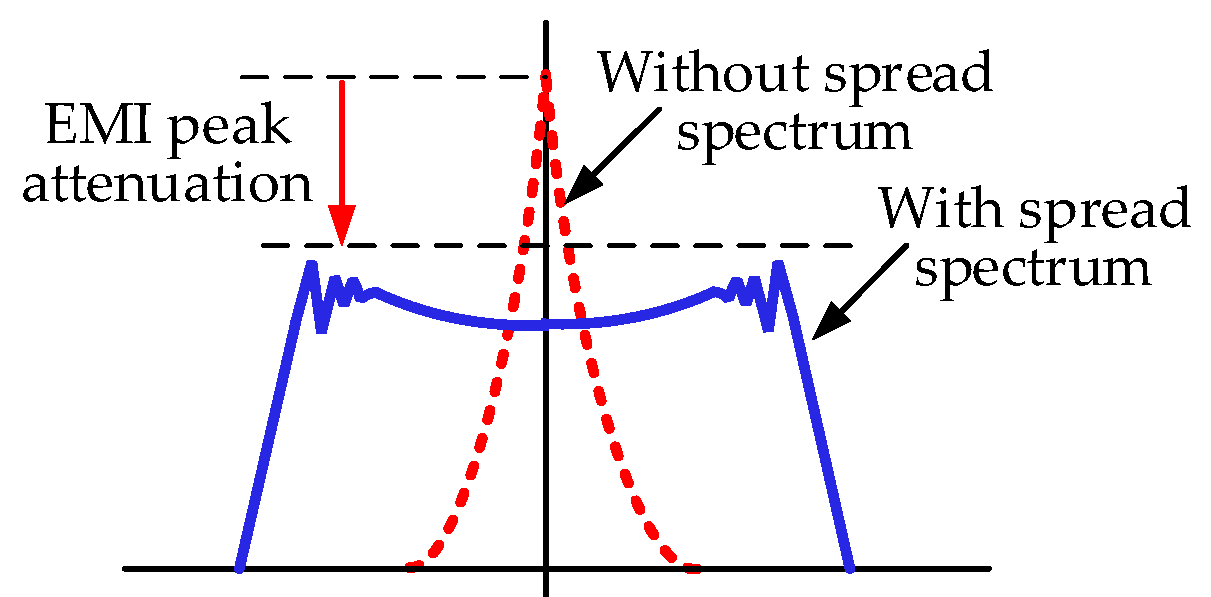
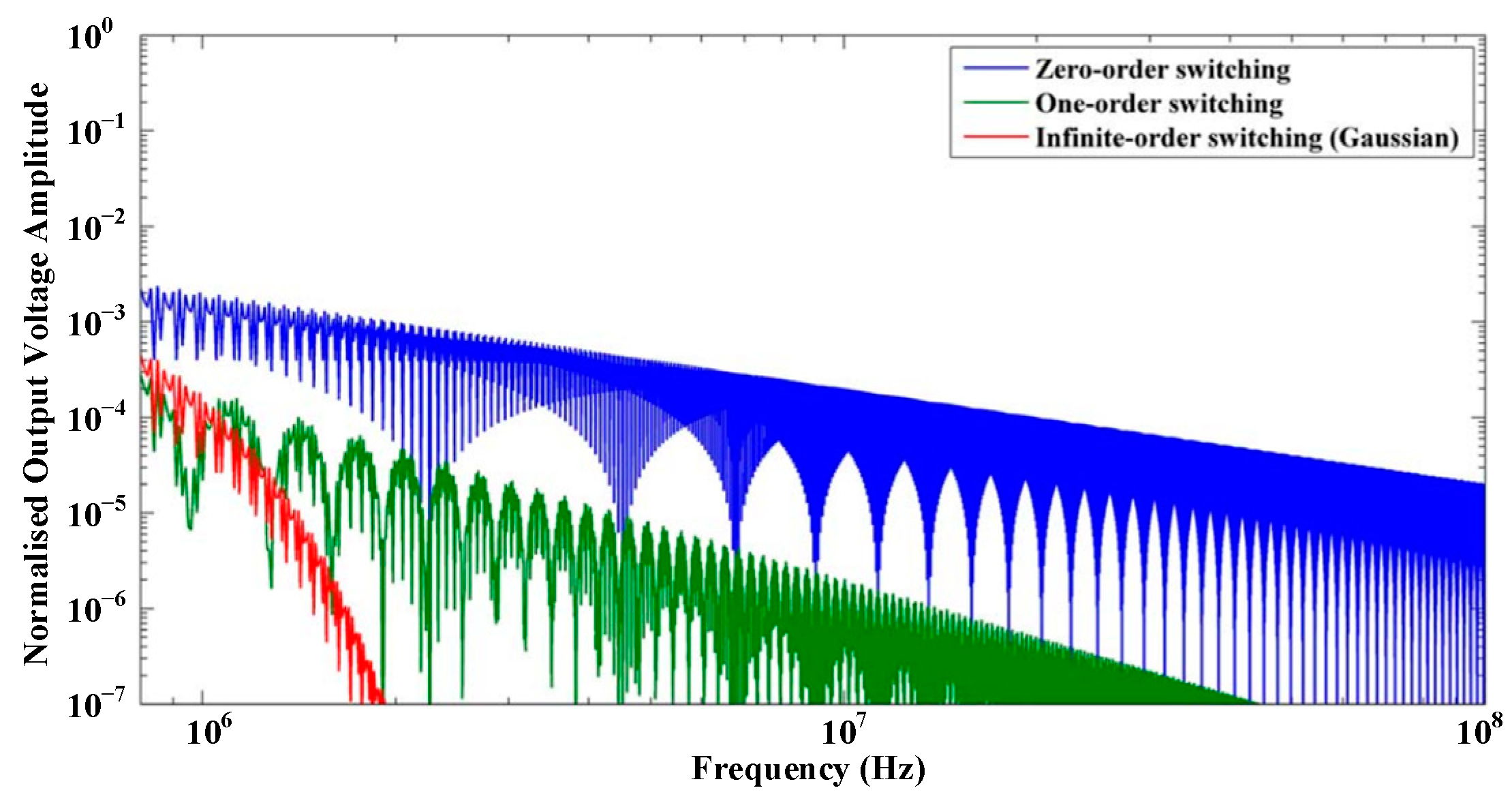
4.2.1. Spread Spectrum Modulation
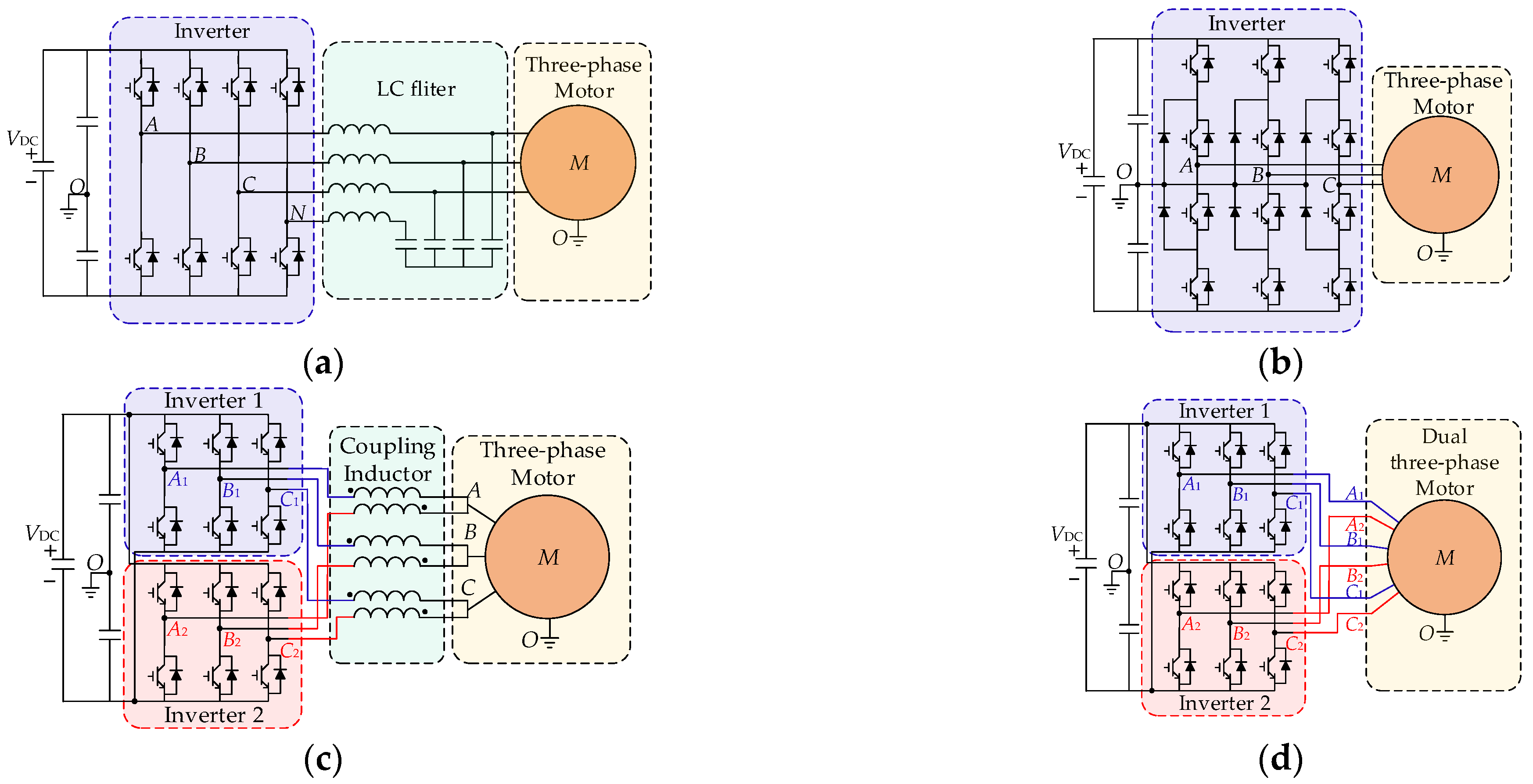
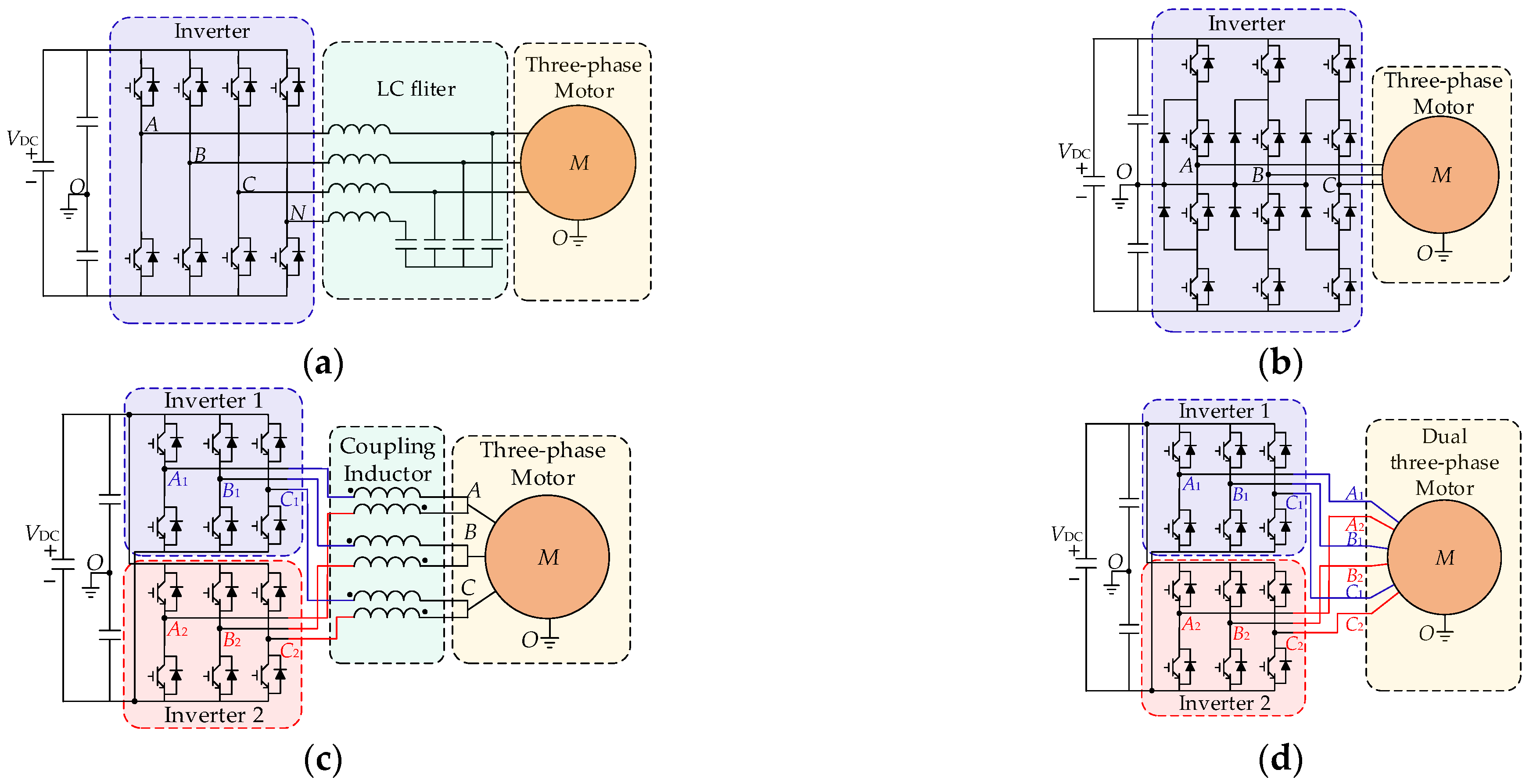
4.2.2. Advanced Topology for ZCM Modulation
4.2.3. Active Gate Driver
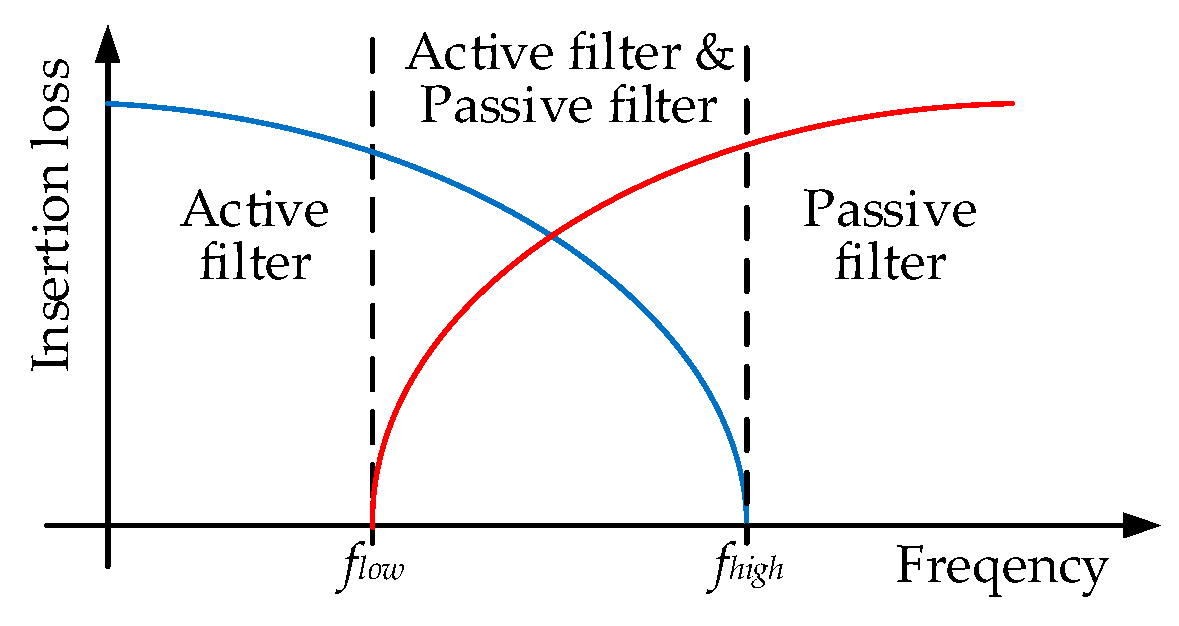
4.2.4. Active EMI Filter
5. Conclusions
- (1)
- The modeling methods for conducted EMI mainly include time-domain modeling, frequency-domain modeling, and behavioral modeling.
- (2)
- Time-domain modeling and frequency-domain modeling provide detailed modeling of converters, revealing the mechanism of EMI generation and propagation. They provide a basis for the converter design. However, it is difficult to balance prediction accuracy, computational speed, and convergence.
- (3)
- Behavioral modeling treats the converter as a “black box”, which can achieve accurate and fast predictions. Behavioral modeling must rely on existing prototypes for modeling, meaning that it cannot provide guidance for EMC predesign. However, behavior modeling still plays a crucial role in guiding the design of filters.
- (1)
- Compared to conducted EMI, there is less research on radiated EMI modeling. Radiated EMI modeling can be mainly divided into three aspects: cable, motor, and inverter.
- (2)
- With the development of IMDs, the impact of cables on radiation will gradually decrease, and the motor’s radiation emissions will become the dominant factor in the future. Numerical methods are common modeling techniques, but they are time-consuming and computationally inefficient. Therefore, there is a growing research trend towards developing methods that balance accuracy and computational efficiency.
- (3)
- Compared to the motor and cable, the inverter itself has lower levels of radiated EMI. However, as the noise source in motor drive systems, the research on the influence of the inverter on radiation is important.
- (1)
- Passive EMI filters are widely used and highly effective methods for suppressing electromagnetic interference (EMI). However, their bulky size poses a challenge to improving power density. Currently, research efforts are focused on optimizing the high-frequency performance and power density of these filters.
- (2)
- Active suppression has gained increasing attention and research due to its advantages in high power density.
- (3)
- SSM and ZCM modulation based on advanced topology are effective in suppressing electromagnetic interference for low-frequency conducted interference. However, using or sacrificing switch freedom to optimize EMI may lead to a deterioration in control performance, which is a crucial aspect to consider.
- (4)
- AGD, which achieves noise attenuation by optimizing the switching trajectory, is effective in suppressing high-frequency EMI. However, compared to other suppression methods, AGD places higher demands on packaging technology and has limited applications in motor drive systems.
- (5)
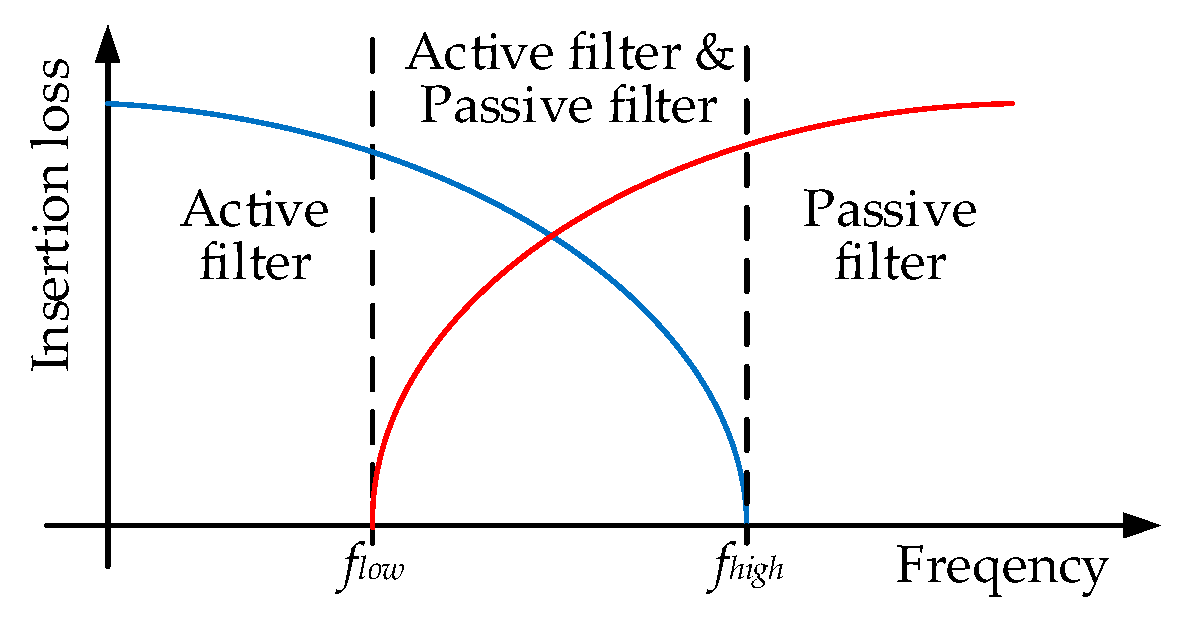
- Compared to passive EMI filters, AEFs can effectively increase power density. However, due to bandwidth limitations and parasitic parameters, AEFs are difficult to implement for effective EMI suppression across a wide frequency range. The combination of AEFs and passive EMI filters, known as hybrid filters, is currently a hot research direction.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Barzkar, A.; Ghassemi, M. Components of Electrical Power Systems in More and All-Electric Aircraft: A Review. IEEE Trans. Transp. Electrif. 2022, 8, 4037–4053. [Google Scholar] [CrossRef]
- Sustainable Development Goals. Available online: https://www.un.org/sustainabledevelopment/sustainabledevelopment-goals/ (accessed on 4 June 2020).
- Ansell, P.J.; Haran, K.S. Electrified Airplanes: A Path to Zero-Emission Air Travel. IEEE Electrif. Mag. 2020, 8, 18–26. [Google Scholar] [CrossRef]
- Barzkar, A.; Ghassemi, M. Electric Power Systems in More and All Electric Aircraft: A Review. IEEE Access 2020, 8, 169314–169332. [Google Scholar] [CrossRef]
- Berg, F.; Palmer, J.; Miller, P.; Dodds, G. HTS System and Component Targets for a Distributed Aircraft Propulsion System. IEEE Trans. Appl. Supercond. 2017, 27, 1–7. [Google Scholar] [CrossRef]
- Rosero, J.A.; Ortega, J.A.; Aldabas, E.; Romeral, L. Moving towards a more electric aircraft. IEEE Aerosp. Electron. Syst. Mag. 2007, 22, 3–9. [Google Scholar] [CrossRef]
- Sayed, E.; Abdalmagid, M.; Pietrini, G.; Sa’Adeh, N.; Callegaro, A.D.; Goldstein, C.; Emadi, A. Review of Electric Machines in More-/Hybrid-/Turbo-Electric Aircraft. IEEE Trans. Transp. Electrif. 2021, 7, 2976–3005. [Google Scholar] [CrossRef]
- Ni, K.; Liu, Y.; Mei, Z.; Wu, T.; Hu, Y.; Wen, H.; Wang, Y. Electrical and Electronic Technologies in More-Electric Aircraft: A Review. IEEE Access 2019, 7, 76145–76166. [Google Scholar] [CrossRef]
- 787 No-Bleed Systems: Saving Fuel and Enhancing Operational Efficiencies. Available online: https: //www.boeing.com/commercial/aeromagazine/articles/qtr_4_07/AERO_Q407_article2.pdf (accessed on 1 September 2023).
- Wheeler, P.; Bozhko, S. The More Electric Aircraft: Technology and challenges. IEEE Electrif. Mag. 2014, 2, 6–12. [Google Scholar] [CrossRef]
- Cavallo, A.; Canciello, G.; Russo, A. Integrated supervised adaptive control for the more Electric Aircraft. Automatica 2020, 117, 108956. [Google Scholar] [CrossRef]
- Qiao, G.; Liu, G.; Shi, Z.; Wang, Y.; Ma, S.; Lim, T.C. A review of electromechanical actuators for More/All Electric aircraft systems. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2018, 232, 4128–4151. [Google Scholar] [CrossRef]
- Russo, A.; Cavallo, A. Stability and Control for Buck–Boost Converter for Aeronautic Power Management. Energies 2023, 16, 988. [Google Scholar] [CrossRef]
- Maré, J. Aerospace Actuators 1: Needs, Reliability and Hydraulic Power Solutions; ISTE Ltd.: London, UK, 2016; pp. 1–32. [Google Scholar]
- Yin, Z.; Hu, N.; Chen, J.; Yang, Y.; Shen, G. A review of fault diagnosis, prognosis and health management for aircraft electromechanical actuators. IET Electr. Power Appl. 2022, 11, 1249–1272. [Google Scholar] [CrossRef]
- Sarigiannidis, A.G.; Beniakar, M.E.; Kakosimos, P.E.; Kladas, A.G.; Papini, L.; Gerada, C. Fault Tolerant Design of Fractional Slot Winding Permanent Magnet Aerospace Actuator. IEEE Trans. Transp. Electrif. 2016, 2, 380–390. [Google Scholar] [CrossRef]
- Cao, W.; Mecrow, B.C.; Atkinson, G.J.; Bennett, J.W.; Atkinson, D.J. Overview of Electric Motor Technologies Used for More Electric Aircraft (MEA). IEEE Trans. Ind. Electron. 2012, 59, 3523–3531. [Google Scholar]
- Millan, J.; Godignon, P.; Perpina, X.; Perez-Tomas, A.; Rebollo, J. A Survey of Wide Bandgap Power Semiconductor Devices. IEEE Trans. Power Electron. 2014, 29, 2155–2163. [Google Scholar] [CrossRef]
- Zhang, G.; Wang, S.; Li, C.; Li, X.; Gu, X. A Space Vector Based Zero Common-Mode Voltage Modulation Method for a Modular Multilevel Converter. World Electr. Veh. J. 2023, 14, 53. [Google Scholar] [CrossRef]
- Tawfiq, K.B.; Güleç, M.; Sergeant, P. Bearing Current and Shaft Voltage in Electrical Machines: A Comprehensive Research Review. Machines 2023, 11, 550. [Google Scholar]
- Umetani, K.; Matsumoto, R.; Hiraki, E. Prevention of Oscillatory False Triggering of GaN-FETs by Balancing Gate-Drain Capacitance and Common-Source Inductance. IEEE Trans. Ind. Appl. 2019, 55, 610–619. [Google Scholar] [CrossRef]
- He, H.; Sun, F.; Wang, Z.; Lin, C.; Zhang, C.; Xiong, R.; Deng, J.; Zhu, X.; Xie, P.; Zhang, S.; et al. China’s battery electric vehicles lead the world: Achievements in technology system architecture and technological breakthroughs. Green Energy Intell. Transp. 2022, 1, 100020. [Google Scholar] [CrossRef]
- Perdikakis, W.; Scott, M.J.; Yost, K.J.; Kitzmiller, C.; Hall, B.; Sheets, K.A. Comparison of Si and SiC EMI and Efficiency in a Two-Level Aerospace Motor Drive Application. IEEE Trans. Transp. Electrif. 2020, 6, 1401–1411. [Google Scholar] [CrossRef]
- Ren, D.; Du, P.; He, Y.; Chen, K.; Luo, J.; Michelson, D.G. A Fast Calculation Approach for the Shielding Effectiveness of an Enclosure With Numerous Small Apertures. IEEE Trans. Electromagn. Compat. 2016, 58, 1033–1041. [Google Scholar] [CrossRef]
- Xiao, P.; Du, P.; Zhang, B. An Analytical Method for Radiated Electromagnetic and Shielding Effectiveness of Braided Coaxial Cable. IEEE Trans. Electromagn. Compat. 2019, 61, 121–127. [Google Scholar] [CrossRef]
- Jia, X.; Hu, C.; Dong, B.; He, F.; Wang, H.; Xu, D. System-Level Conducted EMI Model for SiC Powertrain of Electric Vehicles. In Proceedings of the 2020 IEEE Applied Power Electronics Conference and Exposition (APEC), New Orleans, LA, USA, 15–19 March 2020. [Google Scholar]
- Lee, W.; Li, S.; Minav, T.A.; Pietola, M.; Han, D.; Sarlioglu, B. Achieving high-performance electrified actuation system with integrated motor drive and wide bandgap power electronics. In Proceedings of the 2017 19th European Conference on Power Electronics and Applications (EPE’17 ECCE Europe), Warsaw, Poland, 11–14 September 2017. [Google Scholar]
- Zhang, B.; Song, Z.; Liu, S.; Huang, R.; Liu, C. Overview of Integrated Electric Motor Drives: Opportunities and Challenges. Energies 2022, 15, 8299. [Google Scholar] [CrossRef]
- Jahns, T.M.; Sarlioglu, B. The Incredible Shrinking Motor Drive: Accelerating the Transition to Integrated Motor Drives. IEEE Power Electron. Mag. 2020, 7, 18–27. [Google Scholar] [CrossRef]
- Swanke, J.A.; Jahns, T.M. Reliability Analysis of a Fault-Tolerant Integrated Modular Motor Drive for an Urban Air Mobility Aircraft Using Markov Chains. IEEE Trans. Transp. Electrif. 2022, 8, 4523–4533. [Google Scholar] [CrossRef]
- Lee, W.; Li, S.; Han, D.; Sarlioglu, B.; Minav, T.A.; Pietola, M. A Review of Integrated Motor Drive and Wide-Bandgap Power Electronics for High-Performance Electro-Hydrostatic Actuators. IEEE Trans. Transp. Electrif. 2018, 4, 684–693. [Google Scholar] [CrossRef]
- Khan, W.A.; Ebrahimian, A.; Weise, N. Design of High Current, High Power Density GaN Based Motor Drive for All Electric Aircraft Application. In Proceedings of the 2022 IEEE 9th Workshop on Wide Bandgap Power Devices & Applications (WiPDA), Redondo Beach, CA, USA, 7 November 2022. [Google Scholar]
- Mohamed, A.H.; Vansompel, H.; Sergeant, P. Electrothermal Design of a Discrete GaN-Based Converter for Integrated Modular Motor Drives. IEEE J. Emerg. Sel. Top. Power Electron. 2021, 9, 5390–5406. [Google Scholar] [CrossRef]
- Gao, Z.; Jiang, D.; Kong, W.; Chen, C.; Fang, H.; Wang, C.; Li, D.; Zhang, Y.; Qu, R. A GaN-Based Integrated Modular Motor Drive for Open-Winding Permanent Magnet Synchronous Motor Application. In Proceedings of the 2018 1st Workshop on Wide Bandgap Power Devices and Applications in Asia (WiPDA Asia), Xi’an, China, 16–18 May 2018. [Google Scholar]
- Narayanasamy, B.; Luo, F. A Survey of Active EMI Filters for Conducted EMI Noise Reduction in Power Electronic Converters. IEEE Trans. Electromagn. Compat. 2019, 61, 2040–2049. [Google Scholar] [CrossRef]
- Chen, T.; Caicedo-Narvaez, C.; Wang, H.; Moallem, M.; Fahimi, B.; Kiani, M. Electromagnetic Compatibility Analysis of an Induction Motor Drive With Integrated Power Converter. IEEE Trans. Magn. 2020, 56, 1–4. [Google Scholar] [CrossRef]
- Gui, H.; Zhang, Z.; Chen, R.; Ren, R.; Niu, J.; Li, H.; Dong, Z.; Timms, C.; Wang, F.; Tolbert, L.M.; et al. Development of High-Power High Switching Frequency Cryogenically Cooled Inverter for Aircraft Applications. IEEE Trans. Power Electron. 2020, 35, 5670–5682. [Google Scholar] [CrossRef]
- Morya, A.K.; Gardner, M.C.; Anvari, B.; Liu, L.; Yepes, A.G.; Doval-Gandoy, J.; Toliyat, H.A. Wide Bandgap Devices in AC Electric Drives: Opportunities and Challenges. IEEE Trans. Transp. Electrif. 2019, 5, 3–20. [Google Scholar] [CrossRef]
- Tuysuz, A.; Bosshard, R.; Kolar, J.W. Performance comparison of a GaN GIT and a Si IGBT for high-speed drive applications. In Proceedings of the 2014 International Power Electronics Conference (IPEC-Hiroshima 2014—ECCE ASIA), Hiroshima, Japan, 18–21 May 2014. [Google Scholar]
- Hazra, S.; Madhusoodhanan, S.; Moghaddam, G.K.; Hatua, K.; Bhattacharya, S. Design Considerations and Performance Evaluation of 1200-V 100-A SiC MOSFET-Based Two-Level Voltage Source Converter. IEEE Trans. Ind. Appl. 2016, 52, 4257–4268. [Google Scholar] [CrossRef]
- Wang, J.; Wang, B.; Zhang, L.; Wang, J.; Shchurov, N.I.; Malozyomov, B.V. Review of bidirectional DC–DC converter topologies for hybrid energy storage system of new energy vehicles. Green Energy Intell. Transp. 2022, 1, 100010. [Google Scholar] [CrossRef]
- Han, D.; Li, S.; Wu, Y.; Choi, W.; Sarlioglu, B. Comparative Analysis on Conducted CM EMI Emission of Motor Drives: WBG Versus Si Devices. IEEE Trans. Ind. Electron. 2017, 64, 8353–8363. [Google Scholar] [CrossRef]
- Chen, J.; Du, X.; Luo, Q.; Zhang, X.; Sun, P.; Zhou, L. A Review of Switching Oscillations of Wide Bandgap Semiconductor Devices. IEEE Trans. Power Electron. 2020, 35, 13182–13199. [Google Scholar] [CrossRef]
- Liu, T.; Wong, T.T.Y.; Shen, Z.J. A Survey on Switching Oscillations in Power Converters. IEEE J. Emerg. Sel. Top. Power Electron. 2020, 8, 893–908. [Google Scholar] [CrossRef]
- Wang, K.; Lu, H.; Chen, C.; Xiong, Y. Modeling of System-Level Conducted EMI of the High-Voltage Electric Drive System in Electric Vehicles. IEEE Trans. Electromagn. Compat. 2022, 64, 741–749. [Google Scholar] [CrossRef]
- Zhuolin, D.; Dong, Z.; Tao, F.; Xuhui, W. Prediction of conducted EMI in three phase inverters by simulation method. In Proceedings of the 2017 IEEE Transportation Electrification Conference and Expo, Asia-Pacific (ITEC Asia-Pacific), Harbin, China, 7–10 August 2017. [Google Scholar]
- Chen, L.; Xu, Z.; Zhou, T.; Chen, H. Modeling of Conducted EMI in Motor Drive System Based on Double Pulse Test and Impedance Measurement. In Proceedings of the 2022 Asia-Pacific International Symposium on Electromagnetic Compatibility (APEMC), Beijing, China, 1–4 September 2022. [Google Scholar]
- Takahashi, S.; Wada, K.; Ayano, H.; Ogasawara, S.; Shimizu, T. Review of Modeling and Suppression Techniques for Electromagnetic Interference in Power Conversion Systems. IEEJ J. Ind. Appl. 2022, 11, 7–19. [Google Scholar] [CrossRef]
- Hu, S.; Wang, M.; Liang, Z.; He, X. A Frequency-Based Stray Parameter Extraction Method Based on Oscillation in SiC MOSFET Dynamics. IEEE Trans. Power Electron. 2021, 36, 6153–6157. [Google Scholar] [CrossRef]
- Wunsch, B.; Stevanovic, I.; Skibin, S. Length-Scalable Multiconductor Cable Modeling for EMI Simulations in Power Electronics. IEEE Trans. Power Electron. 2017, 32, 1908–1916. [Google Scholar] [CrossRef]
- Wang, K.; Lu, H.; Li, X. High-Frequency Modeling of the High-Voltage Electric Drive System for Conducted EMI Simulation in Electric Vehicles. IEEE Trans. Transp. Electrif. 2023, 9, 2808–2819. [Google Scholar] [CrossRef]
- Maekawa, S.; Tsuda, J.; Kuzumaki, A.; Matsumoto, S.; Mochikawa, H.; Kubota, H. EMI prediction method for SiC inverter by the modeling of structure and the accurate model of power device. In Proceedings of the 2014 International Power Electronics Conference (IPEC-Hiroshima 2014—ECCE ASIA), Hiroshima, Japan, 18–21 May 2014. [Google Scholar]
- Tan, R.; Ye, S.; Deng, C.; Yu, C.; Zhou, A.; Du, C. Research on Prediction Modeling of EMI in Multi-in-one Electric Drive System. In Proceedings of the 2021 4th International Conference on Energy, Electrical and Power Engineering (CEEPE), Chongqing, China, 23–25 April 2021. [Google Scholar]
- Safayet, A.; Islam, M. Modeling of Conducted Emission for a Three-Phase Motor Control Inverter. IEEE Trans. Ind. Appl. 2021, 57, 1202–1211. [Google Scholar] [CrossRef]
- Ran, L.; Gokani, S.; Clare, J.; Bradley, K.J.; Christopoulos, C. Conducted Electromagnetic Emissions in Induction Motor Drive Systems Part II: Frequency Domain Models. IEEE Trans. Power Electron. 1998, 4, 768–776. [Google Scholar] [CrossRef]
- Xue, J.; Wang, F. Mixed-mode EMI noise in three-phase DC-fed PWM motor drive system. In Proceedings of the 2013 IEEE Energy Conversion Congress and Exposition, Denver, CO, USA, 15–19 September 2013. [Google Scholar]
- Touré, B.; Schanen, J.; Gerbaud, L.; Meynard, T.; Roudet, J.; Ruelland, R. EMC Modeling of Drives for Aircraft Applications: Modeling Process, EMI Filter Optimization, and Technological Choice. IEEE Trans. Power Electron. 2013, 28, 1145–1156. [Google Scholar] [CrossRef]
- Jia, X. Influence of System Layout on CM EMI Noise of SiC Electric Vehicle Powertrains. CPSS Trans. Power Electron. Appl. 2021, 6, 298–309. [Google Scholar] [CrossRef]
- Xiang, Y.; Pei, X.; Zhou, W.; Kang, Y.; Wang, H. A Fast and Precise Method for Modeling EMI Source in Two-Level Three-Phase Converter. IEEE Trans. Power Electron. 2019, 34, 10650–10664. [Google Scholar] [CrossRef]
- Zhang, R.; Chen, W.; Zhou, Y.; Shi, Z.; Yan, R.; Yang, X. Mathematical Modeling of EMI Spectrum Envelope Based on Switching Transient Behavior. IEEE J. Emerg. Sel. Top. Power Electron. 2022, 10, 2497–2515. [Google Scholar] [CrossRef]
- Kharanaq, F.A.; Emadi, A.; Bilgin, B. Modeling of Conducted Emissions for EMI Analysis of Power Converters: State-of-the-Art Review. IEEE Access 2020, 8, 189313–189325. [Google Scholar] [CrossRef]
- Wan, L.; Beshir, A.H.; Wu, X.; Liu, X.; Grassi, F.; Spadacini, G.; Pignari, S.A. Black-box Modeling of Converters in Renewable Energy Systems for EMC Assessment: Overview and Discussion of Available Models. Chin. J. Electr. Eng. 2022, 8, 13–28. [Google Scholar] [CrossRef]
- Amara, M.; Vollaire, C.; Ali, M.; Costa, F. Black box EMC modeling of a three phase inverter. In Proceedings of the 2018 International Symposium on Electromagnetic Compatibility (EMC EUROPE), Amsterdam, Netherlands, 27–30 August 2018. [Google Scholar]
- Bishnoi, H.; Mattavelli, P.; Burgos, R.; Boroyevich, D. EMI Behavioral Models of DC-Fed Three-Phase Motor Drive Systems. IEEE Trans. Power Electron. 2014, 29, 4633–4645. [Google Scholar] [CrossRef]
- Sun, B.; Burgos, R.; Boroyevich, D. Common-Mode EMI Unterminated Behavioral Model of Wide-Bandgap-Based Power Converters Operating at High Switching Frequency. IEEE J. Emerg. Sel. Top. Power Electron. 2019, 7, 2561–2570. [Google Scholar] [CrossRef]
- Wan, L.; Beshir, A.H.; Wu, X.; Liu, X.; Grassi, F.; Spadacini, G.; Pignari, S.A.; Zanoni, M.; Tenti, L.; Chiumeo, R. Black-Box Modelling of Low-Switching-Frequency Power Inverters for EMC Analyses in Renewable Power Systems. Energies 2021, 14, 3413. [Google Scholar] [CrossRef]
- Trinchero, R.; Stievano, I.S.; Canavero, F.G. Enhanced Time-Invariant Linear Model for the EMI Prediction of Switching Circuits. IEEE Trans. Electromagn. Compat. 2020, 62, 2294–2302. [Google Scholar] [CrossRef]
- Zhou, P.; Pei, X.; Zhang, K.; Shan, Y. Improved EMI Behavioral Modeling Method of Three-Phase Inverter Based on the Noise-Source Phase Alignment. IEEE Trans. Power Electron. 2022, 37, 9333–9344. [Google Scholar] [CrossRef]
- Zhou, W.; Pei, X.; Xiang, Y.; Kang, Y. A New EMI Modeling Method for Mixed-Mode Noise Analysis in Three-Phase Inverter System. IEEE Access 2020, 8, 71535–71547. [Google Scholar] [CrossRef]
- Rosales, A.; Sarikhani, A.; Mohammed, O.A. Evaluation of Radiated Electromagnetic Field Interference Due to Frequency Swithcing in PWM Motor Drives by 3D Finite Elements. IEEE Trans. Magn. 2011, 47, 1474–1477. [Google Scholar] [CrossRef]
- Huangfu, Y.; Wang, S.; Di Rienzo, L.; Zhu, J. Radiated EMI Modeling and Performance Analysis of a PWM PMSM Drive System Based on Field-Circuit Coupled FEM. IEEE Trans. Magn. 2017, 53, 1–4. [Google Scholar] [CrossRef]
- Andrieu, G.; Reineix, A. On the Application of the “Equivalent Cable Bundle Method” to Cable Bundles in Presence of Complex Ground Structures. IEEE Trans. Electromagn. Compat. 2013, 55, 798–801. [Google Scholar] [CrossRef]
- Ala, G.; Di Piazza, M.C.; Tine, G.; Viola, F.; Vitale, G. Evaluation of Radiated EMI in 42-V Vehicle Electrical Systems by FDTD Simulation. IEEE Trans. Veh. Technol. 2007, 56, 1477–1484. [Google Scholar] [CrossRef]
- Yahyaoui, W.; Pichon, L.; Duval, F. A 3D PEEC Method for the Prediction of Radiated Fields From Automotive Cables. IEEE Trans. Magn. 2010, 46, 3053–3056. [Google Scholar] [CrossRef]
- Barzegaran, M.R.; Mohammed, O.A. 3-D FE Wire Modeling and Analysis of Electromagnetic Signatures From Electric Power Drive Components and Systems. IEEE Trans. Magn. 2013, 49, 1937–1940. [Google Scholar] [CrossRef]
- Costa, F.; Gautier, C.; Revol, B.; Genoulaz, J.; Demoulin, B. Modeling of the near-field electromagnetic radiation of power cables in automotives or aeronautics. IEEE Trans. Power Electron. 2013, 28, 4580–4593. [Google Scholar] [CrossRef]
- Wei, S.; Pan, Z.; Yang, J.; Du, P. A Fast Prediction Approach of Radiated Emissions From Closely-Spaced Bent Cables in Motor Driving System. IEEE Trans. Veh. Technol. 2022, 71, 6100–6109. [Google Scholar] [CrossRef]
- Della Torre, F.; Morando, A.P. Study on Far-Field Radiation From Three-Phase Induction Machines. IEEE Trans. Electromagn. Compat. 2009, 51, 928–936. [Google Scholar] [CrossRef]
- Jo, H.; Han, K.J. Estimation of radiation patterns from the stator winding of AC motors using array model. In Proceedings of the 2016 IEEE International Symposium on Electromagnetic Compatibility (EMC), Ottawa, ON, Canada, 25–29 July 2016. [Google Scholar]
- Wei, S.; Pan, Z.; Yang, J.; Du, P. A Reduction Technique for Modeling Closely Spaced Wires Considering Proximity Effects Applied to Predict Radiated Emission From Electric Motor. IEEE Trans. Ind. Electron. 2021, 68, 12535–12542. [Google Scholar] [CrossRef]
- Zhang, Y.; Wang, S.; Chu, Y. Investigation of Radiated Electromagnetic Interference for an Isolated High-Frequency DC–DC Power Converter With Power Cables. IEEE Trans. Power Electron. 2019, 34, 9632–9643. [Google Scholar] [CrossRef]
- Zhang, B.; Wang, S. Radiated Electromagnetic Interference Source Modeling for a Three Phase Motor Drive System with a SiC Power Module. In Proceedings of the 2021 IEEE International Joint EMC/SI/PI and EMC Europe Symposium, Raleigh, NC, USA, 26 July–13 August 2021. [Google Scholar]
- Zhang, B.; Wang, S. Radiated Electromagnetic Interference Modeling for Three Phase Motor Drive Systems with SiC Power Modules. In Proceedings of the 2021 IEEE Applied Power Electronics Conference and Exposition (APEC), Phoenix, AZ, USA, 14–17 June 2021. [Google Scholar]
- Fei, C.; Yang, Y.; Li, Q.; Lee, F.C. Shielding Technique for Planar Matrix Transformers to Suppress Common-Mode EMI Noise and Improve Efficiency. IEEE Trans. Ind. Electron. 2018, 65, 1263–1272. [Google Scholar] [CrossRef]
- Yao, J.; Wang, S.; Luo, Z. Modeling, Analysis, and Reduction of Radiated EMI Due to the Voltage Across Input and Output Cables in an Automotive Non-Isolated Power Converter. IEEE Trans. Power Electron. 2022, 37, 5455–5465. [Google Scholar] [CrossRef]
- Wang, S.; Lee, F.C.; van Wyk, J.D.; van Wyk, J.D. A Study of Integration of Parasitic Cancellation Techniques for EMI Filter Design With Discrete Components. IEEE Trans. Power Electron. 2008, 23, 3094–3102. [Google Scholar] [CrossRef]
- Wang, R.; Boroyevich, D.; Blanchette, H.F.; Mattavelli, P. High power density EMI filter design with consideration of self-parasitic. In Proceedings of the 2012 Twenty-Seventh Annual IEEE Applied Power Electronics Conference and Exposition (APEC), Orlando, FL, USA, 5–9 February 2012. [Google Scholar]
- Wang, R.; Blanchette, H.F.; Mu, M.; Boroyevich, D.; Mattavelli, P. Influence of High-Frequency Near-Field Coupling Between Magnetic Components on EMI Filter Design. IEEE Trans. Power Electron. 2013, 28, 4568–4579. [Google Scholar] [CrossRef]
- Zhang, B.; Wang, S. Analysis and Reduction of the Near Magnetic Field Emission From Toroidal Inductors. IEEE Trans. Power Electron. 2020, 35, 6251–6268. [Google Scholar] [CrossRef]
- Li, Y.; Wang, S.; Sheng, H.; Lakshmikanthan, S. Investigate and Reduce Capacitive Couplings in a Flyback Adapter With a DC-Bus Filter to Reduce EMI. IEEE Trans. Power Electron. 2020, 35, 6963–6973. [Google Scholar] [CrossRef]
- Ma, Z.; Yao, J.; Wang, S.; Sheng, H.; Lakshmikanthan, S.; Osterhout, D. Radiated EMI Reduction with Double Shielding Techniques in Active-clamp Flyback Converters. In Proceedings of the 2021 IEEE International Joint EMC/SI/PI and EMC Europe Symposium, Raleigh, NC, USA, 26 July–13 August 2021. [Google Scholar]
- Lai, R.; Maillet, Y.; Wang, F.; Wang, S.; Burgos, R.; Boroyevich, D. An Integrated EMI Choke for Differential-Mode and Common-Mode Noise Suppression. IEEE Trans. Power Electron. 2010, 25, 539–544. [Google Scholar]
- Borsalani, J.; Dastfan, A.; Ghalibafan, J. An Integrated EMI Choke With Improved DM Inductance. IEEE Trans. Power Electron. 2021, 36, 1646–1658. [Google Scholar] [CrossRef]
- Wang, A.; Zheng, F.; Gao, T.; Wu, Z.; Li, X. Integrated CM Inductor for Both DC and AC Noise Attenuation in DC-Fed Motor Drive Systems. IEEE Trans. Power Electron. 2023, 38, 510–522. [Google Scholar] [CrossRef]
- Liu, Y.; Jiang, S.; Liang, W.; Wang, H.; Peng, J. Modeling and Design of the Magnetic Integration of Single- and Multi-Stage EMI Filters. IEEE Trans. Power Electron. 2020, 35, 276–288. [Google Scholar] [CrossRef]
- Chen, R.; VanWyk, J.D.; Wang, S.; Odendaal, W.G. Improving the Characteristics of Integrated EMI Filters by Embedded Conductive Layers. IEEE Trans. Power Electron. 2005, 20, 611–619. [Google Scholar] [CrossRef]
- Jiang, S.; Wang, P.; Wang, W.; Xu, D. Modeling and Design of Full Electromagnetic Integration of a Symmetrical EMI Filtering Circuit With Flexible Multi-Layer Foil Technique. IEEE Trans. Electromagn. Compat. 2023, 65, 414–424. [Google Scholar] [CrossRef]
- Cougo, B.; Sathler, H.H.; Riva, R.; Santos, V.D.; Roux, N.; Sareni, B. Characterization of Low-Inductance SiC Module With Integrated Capacitors for Aircraft Applications Requiring Low Losses and Low EMI Issues. IEEE Trans. Power Electron. 2021, 36, 8230–8242. [Google Scholar] [CrossRef]
- Jia, N.; Tian, X.; Xue, L.; Bai, H.; Tolbert, L.M.; Cui, H. Integrated Common-Mode Filter for GaN Power Module With Improved High-Frequency EMI Performance. IEEE Trans. Power Electron. 2023, 38, 6897–6901. [Google Scholar] [CrossRef]
- Gonzalez, D.; Balcells, J.; Santolaria, A.; Le Bunetel, J.; Gago, J.; Magnon, D.; Brehaut, S. Conducted EMI Reduction in Power Converters by Means of Periodic Switching Frequency Modulation. IEEE Trans. Power Electron. 2007, 22, 2271–2281. [Google Scholar] [CrossRef]
- Lezynski, P. Random Modulation in Inverters With Respect to Electromagnetic Compatibility and Power Quality. IEEE J. Emerg. Sel. Top. Power Electron. 2018, 6, 782–790. [Google Scholar] [CrossRef]
- Mathe, L.; Lungeanu, F.; Sera, D.; Rasmussen, P.O.; Pedersen, J.K. Spread Spectrum Modulation by Using Asymmetric-Carrier Random PWM. IEEE Trans. Ind. Electron. 2012, 59, 3710–3718. [Google Scholar] [CrossRef]
- Trzynadlowski, A.M.; Wang, Z.; Nagashima, J.; Stancu, C. Comparative investigation of PWM techniques for general motors’ new drive for electric vehicles. In Proceedings of the Conference Record of the 2002 IEEE Industry Applications Conference. 37th IAS Annual Meeting (Cat. No.02CH37344), Pittsburgh, PA, USA, 13–18 October 2002. [Google Scholar]
- Kiani Savadkoohi, H.; Arab Khaburi, D.; Sadr, S. A new switching method for PWM inverter with uniform distribution of output current’s spectrum. In Proceedings of the 6th Power Electronics, Drive Systems & Technologies Conference (PEDSTC2015), Tehran, Iran, 3–4 February 2015. [Google Scholar]
- Santolaria, A.; Balcells, J.; Gonzalez, D. Theoretical and experimental results of power converter frequency modulation. In Proceedings of the IEEE 2002 28th Annual Conference of the Industrial Electronics Society. IECON 02, Seville, Spain, 5–8 November 2002. [Google Scholar]
- Gonzalez, D.; Bialasiewicz, J.T.; Balcells, J.; Gago, J. Wavelet-Based Performance Evaluation of Power Converters Operating With Modulated Switching Frequency. IEEE Trans. Ind. Electron. 2008, 55, 3167–3176. [Google Scholar] [CrossRef]
- Yongxiang, X.; Qingbing, Y.; Jibin, Z.; Hao, W. Influence of periodic carrier frequency modulation on inverter loss of permanent magnet synchronous motor drive system. In Proceedings of the 2014 17th International Conference on Electrical Machines and Systems (ICEMS), Hangzhou, China, 22–25 October 2014. [Google Scholar]
- Chen, J.; Jiang, D.; Sun, W.; Shen, Z.; Zhang, Y. A Family of Spread-Spectrum Modulation Schemes Based on Distribution Characteristics to Reduce Conducted EMI for Power Electronics Converters. IEEE Trans. Ind. Appl. 2020, 56, 5142–5157. [Google Scholar] [CrossRef]
- Chen, J.; Jiang, D.; Shen, Z.; Sun, W.; Fang, Z. Uniform Distribution Pulsewidth Modulation Strategy for Three-Phase Converters to Reduce Conducted EMI and Switching Loss. IEEE Trans. Ind. Electron. 2020, 67, 6215–6226. [Google Scholar] [CrossRef]
- Jiang, D.; Li, Q.; Shen, Z. Model predictive PWM for AC motor drives. IET Electr. Power Appl. 2017, 11, 815–822. [Google Scholar] [CrossRef]
- Jiang, D.; Li, Q.; Han, X.; Qu, R. Variable switching frequency PWM for torque ripple control of AC motors. In Proceedings of the 2016 19th International Conference on Electrical Machines and Systems (ICEMS), Chiba, Japan, 2 February 2017. [Google Scholar]
- Jiang, D.; Wang, F. Variable Switching Frequency PWM for Three-Phase Converters Based on Current Ripple Prediction. IEEE Trans. Power Electron. 2013, 28, 4951–4961. [Google Scholar] [CrossRef]
- Hava, A.M.; Cetin, N.O.; Un, E. On the Contribution of PWM Methods to the Common Mode (Leakage) Current in Conventional Three-Phase Two-Level Inverters as Applied to AC Motor Drives. In Proceedings of the 2008 IEEE Industry Applications Society Annual Meeting, Edmonton, AB, Canada, 5–9 October 2008. [Google Scholar]
- Julian, A.L.; Oriti, G.; Lipo, T.A. Elimination of Common-Mode Voltage in Three-Phase Sinusoidal Power Converters. IEEE Trans. Power Electron. 1999, 14, 982–989. [Google Scholar] [CrossRef]
- Zhang, H.; Von Jouanne, A.; Dai, S.; Wallace, A.K.; Wang, F. Multilevel Inverter Modulation Schemes to Eliminate Common-Mode Voltages. IEEE Trans. Ind. Appl. 2000, 36, 1645–1653. [Google Scholar]
- Jiang, D.; Shen, Z.; Wang, F. Common-Mode Voltage Reduction for Paralleled Inverters. IEEE Trans. Power Electron. 2018, 33, 3961–3974. [Google Scholar] [CrossRef]
- von Jauanne, A.; Zhang, H. A Dual-Bridge Inverter Approach to Eliminating Common-Mode Voltages and Bearing and Leakage Currents. IEEE Trans. Power Electron. 1999, 14, 43–48. [Google Scholar] [CrossRef]
- Chen, H.; Zhao, H. Review on pulse-width modulation strategies for common-mode voltage reduction in three-phase voltage-source inverters. IET Power Electron. 2016, 9, 2611–2620. [Google Scholar] [CrossRef]
- Chudzik, P.; Steczek, M.; Tatar, K. Reduction in Selected Torque Harmonics in a Three-Level NPC Inverter-Fed Induction Motor Drive. Energies 2022, 15, 4078. [Google Scholar] [CrossRef]
- Zhang, D.; Wang, F.; Burgos, R.; Boroyevich, D. Total Flux Minimization Control for Integrated Inter-Phase Inductors in Paralleled, Interleaved Three-Phase Two-Level Voltage-Source Converters With Discontinuous Space-Vector Modulation. IEEE Trans. Power Electron. 2012, 27, 1679–1688. [Google Scholar] [CrossRef]
- Shen, Z.; Jiang, D.; Zou, T.; Qu, R. Dual-Segment Three-Phase PMSM With Dual Inverters for Leakage Current and Common-Mode EMI Reduction. IEEE Trans. Power Electron. 2019, 34, 5606–5619. [Google Scholar] [CrossRef]
- Shen, Z.; Jiang, D.; Liu, Z.; Ye, D.; Li, J. Common-Mode Voltage Elimination for Dual Two-Level Inverter-Fed Asymmetrical Six-Phase PMSM. IEEE Trans. Power Electron. 2020, 35, 3828–3840. [Google Scholar] [CrossRef]
- Jiang, D.; Liu, K.; Liu, Z.; Wang, Q.; He, Z.; Qu, R. Four-Module Three-Phase PMSM Drive for Suppressing Vibration and Common-Mode Current. IEEE Trans. Ind. Appl. 2021, 57, 4874–4883. [Google Scholar] [CrossRef]
- Zhang, B.; Wang, S. A Survey of EMI Research in Power Electronics Systems With Wide-Bandgap Semiconductor Devices. IEEE J. Emerg. Sel. Top. Power Electron. 2020, 8, 626–643. [Google Scholar] [CrossRef]
- Wang, R.; Liang, L.; Chen, Y.; Pan, Y.; Li, J.; Han, L.; Tan, G. Self-Adaptive Active Gate Driver for IGBT Switching Performance Optimization Based on Status Monitoring. IEEE Trans. Power Electron. 2020, 35, 6362–6372. [Google Scholar] [CrossRef]
- Idir, N.; Bausiere, R.; Franchaud, J.J. Active gate voltage control of turn-on di/dt and turn-off dv/dt in insulated gate transistors. IEEE Trans. Power Electron. 2006, 21, 849–855. [Google Scholar] [CrossRef]
- Bau, P.; Cousineau, M.; Cougo, B.; Richardeau, F.; Rouger, N. CMOS Active Gate Driver for Closed-Loop dv /dt Control of GaN Transistors. IEEE Trans. Power Electron. 2020, 35, 13322–13332. [Google Scholar] [CrossRef]
- Dymond, H.C.P.; Wang, J.; Liu, D.; Dalton, J.J.O.; McNeill, N.; Pamunuwa, D.; Hollis, S.J.; Stark, B.H. A 6.7-GHz Active Gate Driver for GaN FETs to Combat Overshoot, Ringing, and EMI. IEEE Trans. Power Electron. 2018, 33, 581–594. [Google Scholar] [CrossRef]
- Costa, F.; Magnon, D. Graphical Analysis of the Spectra of EMI Sources in Power Electronics. IEEE Trans. Power Electron. 2005, 20, 1491–1498. [Google Scholar] [CrossRef]
- Yang, X.; Yuan, Y.; Zhang, X.; Palmer, P.R. Shaping High-Power IGBT Switching Transitions by Active Voltage Control for Reduced EMI Generation. IEEE Trans. Ind. Appl. 2015, 51, 1669–1677. [Google Scholar] [CrossRef]
- Xu, C.; Ma, Q.; Xu, P.; Cui, T. Shaping SiC MOSFET Voltage and Current Transitions by Intelligent Control for Reduced EMI Generation. Electronics 2019, 8, 508. [Google Scholar] [CrossRef]
- Ogasawara, S.; Ayano, H.; Akagi, H. An Active Circuit for Cancellation of Common-Mode Voltage Generated by a PWM Inverter. IEEE Trans. Power Electron. 1999, 13, 835–841. [Google Scholar] [CrossRef]
- Wang, S.; Maillet, Y.Y.; Wang, F.; Boroyevich, D.; Burgos, R. Investigation of Hybrid EMI Filters for Common-Mode EMI Suppression in a Motor Drive System. IEEE Trans. Power Electron. 2010, 25, 1034–1045. [Google Scholar] [CrossRef]
- Chen, W.; Yang, X.; Wang, Z. A Novel Hybrid Common-Mode EMI Filter With Active Impedance Multiplication. IEEE Trans. Ind. Electron. 2011, 58, 1826–1834. [Google Scholar] [CrossRef]
- Takahashi, S.; Ogasawara, S.; Takemoto, M.; Orikawa, K.; Tamate, M. Common-Mode Voltage Attenuation of an Active Common-Mode Filter in a Motor Drive System Fed by a PWM Inverter. IEEE Trans. Ind. Appl. 2019, 55, 2721–2730. [Google Scholar] [CrossRef]
- Zhang, Y.; Li, Q.; Jiang, D. A Motor CM Impedance Based Transformerless Active EMI Filter for DC-Side Common-Mode EMI Suppression in Motor Drive System. IEEE Trans. Power Electron. 2020, 35, 10238–10248. [Google Scholar] [CrossRef]
- Zhang, Y.; Jiang, D. An Active EMI Filter in Grounding Circuit for DC Side CM EMI Suppression in Motor Drive System. IEEE Trans. Power Electron. 2022, 37, 2983–2992. [Google Scholar] [CrossRef]
- Dai, L.; Chen, W.; Yang, X.; Zheng, M.; Yang, Y.; Wang, R. A Multi-Function Common Mode Choke Based on Active CM EMI Filters for AC/DC Power Converters. IEEE Access 2019, 7, 43534–43546. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Property | Si | GaN | SiC |
|---|---|---|---|
| Bandgap (eV) | 1.1 | 3.4 | 3.2 |
| Critical electric field (MV/cm) | 0.3 | 3.5 | 3 |
| Electron saturation velocity (107 cm/s) | 1 | 2.5 | 2.2 |
| Thermal conductivity (W/cm·°C) | 1.5 | 1.3 | 5 |
| Maximum operation temperature (°C) | 200 | 300 | 600 |
| Topology | Ref. | Cases | Number of Power Devices | ZCM Performances | System Performances |
|---|---|---|---|---|---|
| Three-phase four-leg inverter | [114] | Conventional three-phase motor drive | 8 full control switches | The CM voltage is reduced by 20 dB up to 100 kHz. |
|
| three-level inverter | [115] | Medium-voltage high-power motor drive | 8 full control switches and 6 clamping diodes | The CM voltage is almost up to 20 kHz. |
|
| paralleled inverter | [116] | High-power motor drive | 12 full control switches | The CM voltage is reduced by 30 dB up to 200 kHz, and 10 dB up to 2 MHz. |
|
| [121] | The performance is the same as that in [121]. |
| |||
| dual three-phase motor | [117] | High-reliability motor drive | The CM leakage current is reduced by almost 20 dB up to 40 kHz. |
| |
| [122] | The CM voltage is reduced by more than 20 dB between 150 kHz and 900 kHz, and 10 dB up to 2 MHz. |
| |||
| four-module three-phase motor | [123] | 24 full control switches | The CM voltage is reduced by more than 30 dB between 150 kHz and 1 MHz, and 10 dB up to 3 MHz. |
|
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Z.; Jiang, D.; Liu, Z.; Zhao, X.; Yang, G.; Liu, H. A Review of EMI Research of High Power Density Motor Drive Systems for Electric Actuator. Actuators 2023, 12, 411. https://doi.org/10.3390/act12110411
Wang Z, Jiang D, Liu Z, Zhao X, Yang G, Liu H. A Review of EMI Research of High Power Density Motor Drive Systems for Electric Actuator. Actuators. 2023; 12(11):411. https://doi.org/10.3390/act12110411
Chicago/Turabian StyleWang, Zhenyu, Dong Jiang, Zicheng Liu, Xuan Zhao, Guang Yang, and Hongyang Liu. 2023. "A Review of EMI Research of High Power Density Motor Drive Systems for Electric Actuator" Actuators 12, no. 11: 411. https://doi.org/10.3390/act12110411
APA StyleWang, Z., Jiang, D., Liu, Z., Zhao, X., Yang, G., & Liu, H. (2023). A Review of EMI Research of High Power Density Motor Drive Systems for Electric Actuator. Actuators, 12(11), 411. https://doi.org/10.3390/act12110411