

Fault Detection for Point Machines: A Review, Challenges, and Perspectives


Abstract
1. Introduction
- We provide a review of fault detection in point machines for research and development personnel, scholars, and engineers, covering the latest data-driven algorithms with comments as well as evaluation metrics.
- We conduct a comprehensive analysis of point machines, including their requirements, inherent features, and external influences.
- We describe the anticipated requirements for an intelligent point machine fault detection system.
- We propose eight urgent issues and possible solutions for future point machine fault detection research which can be of genuine use to infrastructure maintainers and owners, and present a blueprint for intelligent point machine fault detection.
- Which types of data-driven algorithms are employed for point machine fault detection, what are their pros and cons, and what are their specific application scenarios?
- What metrics are appropriate for evaluating the task of fault detection in point machines?
- What are the requirements for an intelligent point machine condition monitoring and fault detection system?
- What future directions can be identified for the advancement of intelligent point machine fault detection?
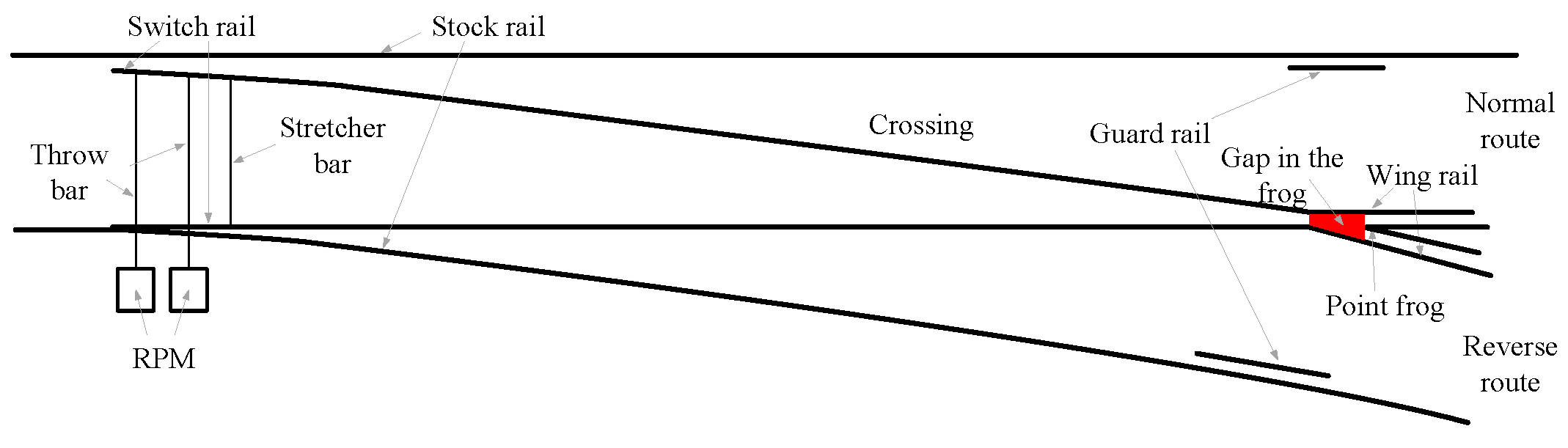
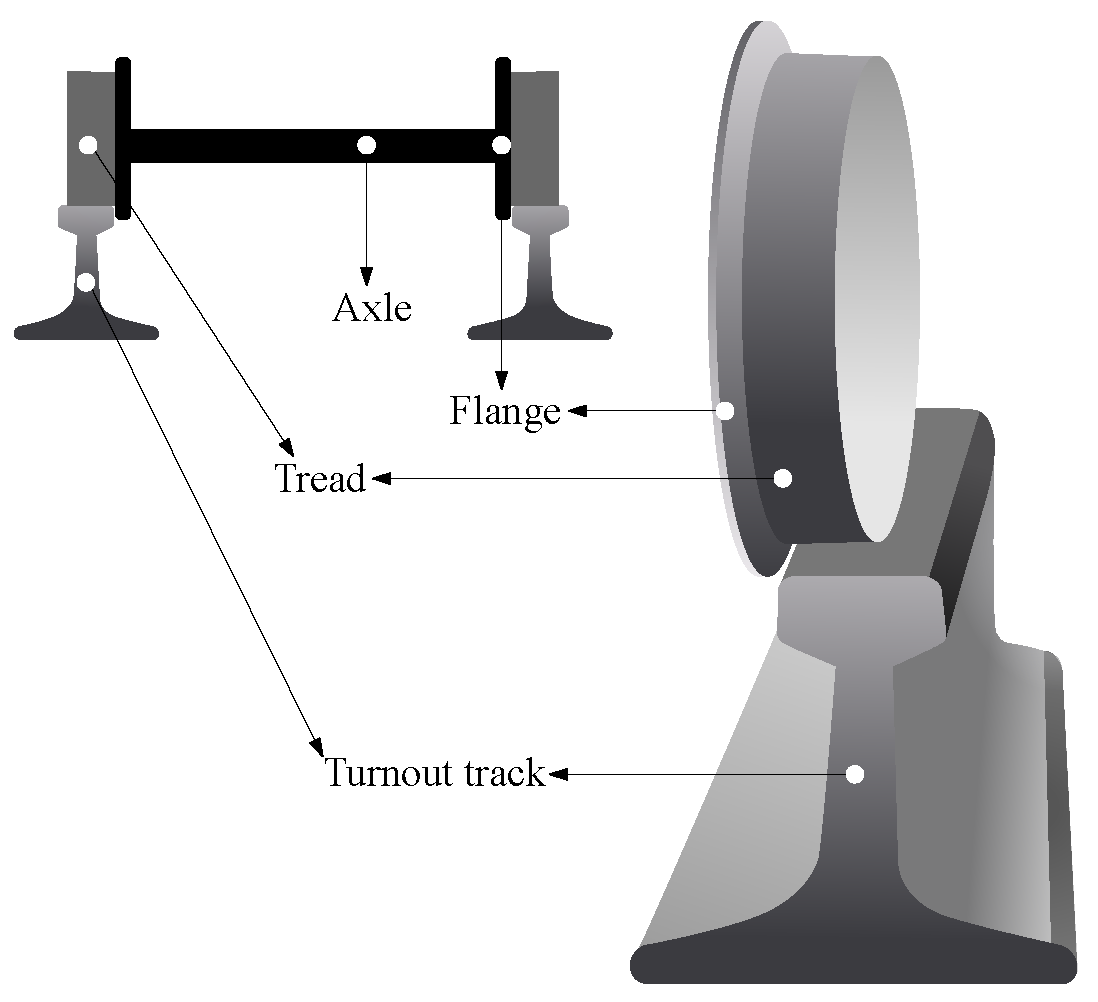
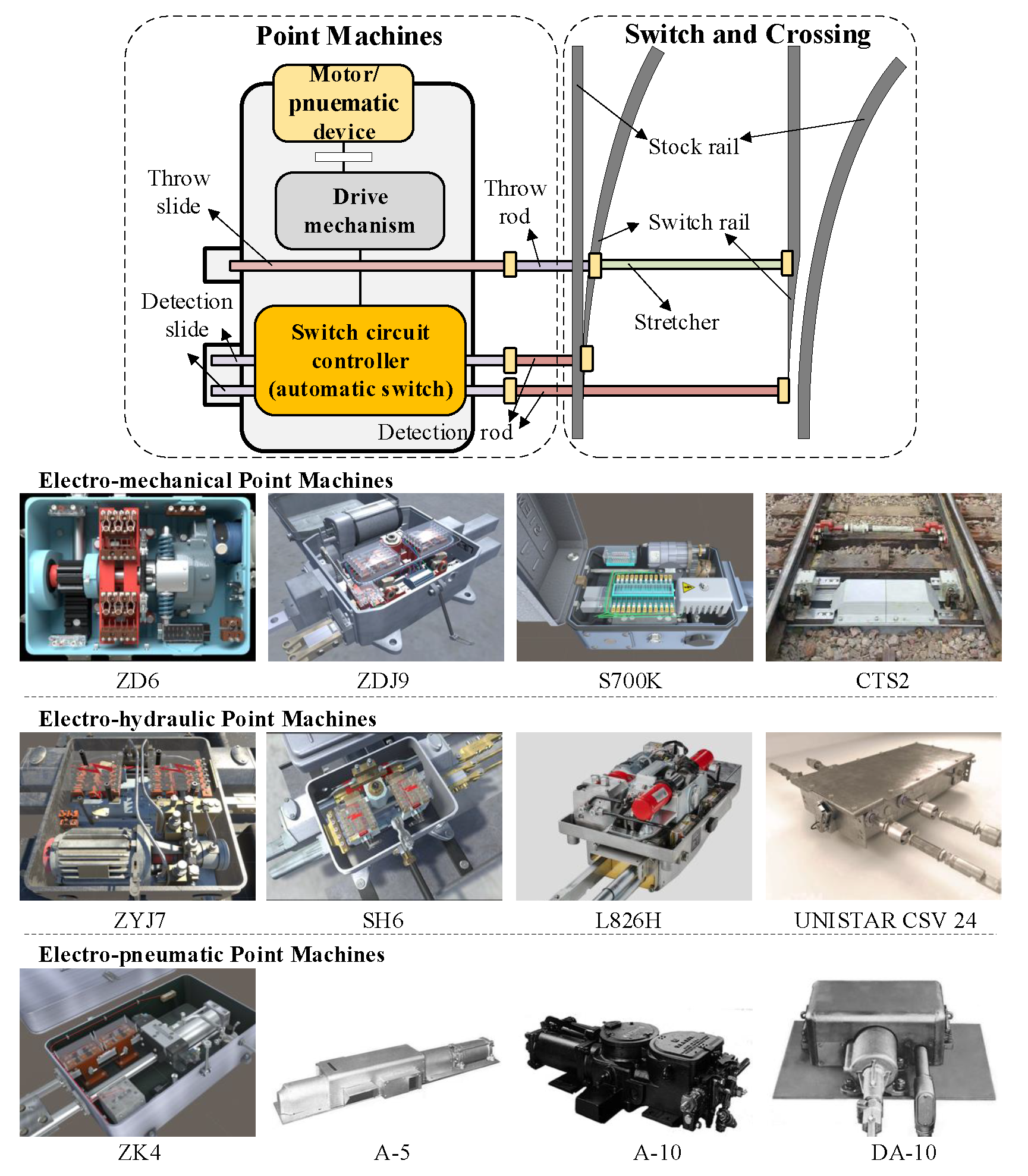
2. Fundamentals of Turnouts and Point Machines
3. Condition Monitoring and Fault Detection
3.1. Common Failure Modes
3.2. Monitored Parameters
- Motor-related parameters. Studies have revealed that the switching resistance best reflects the condition of the point machine [2,3,8]. However, real-time and reliable switching resistance measurement is not easy to achieve; motor-related parameters are an alternative, as the energy provided by the motor overcomes the resistance between movable parts and the track bed during the switching process. In other words, whether the motor operating parameters are normal or not when there are no faults with the motor is consistent with whether the switching resistance is normal or not. Therefore, the motor current, voltage, and power are extensively monitored in actual condition monitoring. In contrast, the motor output speed and torque are rarely employed in actual railway operation due to the difficulties involved in sensor installation.
- Gap-related parameters. The gap between the lock/detection slide notch and the edge of the lock/detection hammer notch in a point machine is considered an indirect measurement of the gap between a switch point and its adjacent stock rail in the closed position, which is a crucial safety parameter for monitoring the condition of a turnout. Too large a gap may cause disastrous consequences, such as train derailment, human injury, and severe damage to both infrastructure and the environment [9,10]. Because the sensor is installed beside the rails at a point where the train wheel sets often pass through, the direct measurement method results in low reliability. At present, alarms based on a threshold gap are widely used in the railway field [11].
- Other parameters. Fault detection based on other parameters is largely absent, as it is not easy to deploy real-time online monitoring sensors, particularly the switch circuit controller. Nonetheless, these parameters can be beneficial for on-site operations and maintenance.
3.3. Fault Detection in Point Machines
3.3.1. Statistical Analysis-Based Methods
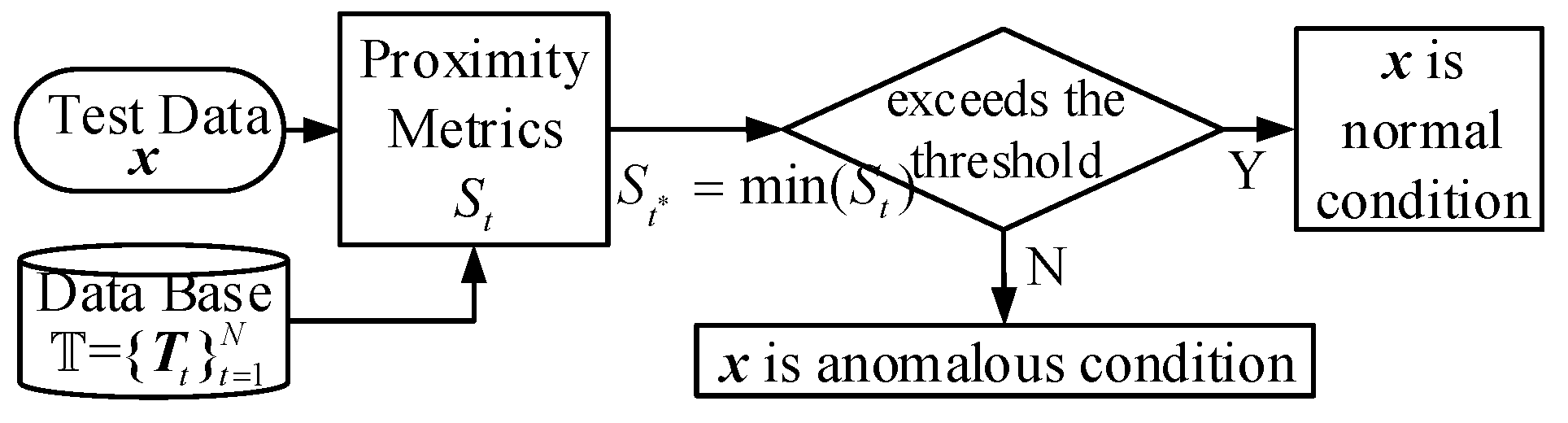
3.3.2. Proximity-Based Methods
3.3.3. Supervised Learning-Based Methods
3.3.4. Unsupervised Learning-Based Methods
3.3.5. Semi-Supervised Learning-Based Methods
3.3.6. Evaluation Metrics
4. Analysis of Point Machines and Monitoring Systems
4.1. Requirements for Point Machines
- High safety and reliability. Because point machines drive the turnout, which is the crucial section of railway track, they involves the operational safety of trains. Any hardware device or software installed in point machines should be reliable and trustworthy, including the sensors, supporting signal processing, and monitoring procedures.
- Long service life. Point machines are designed and manufactured with a focus on a lengthy service life, as replacing the entire machine that works along the trackside requires time and money. Therefore, providers can guarantee high quality, with suppliers typically claiming more than one million throwing movements before machine overhaul.
4.2. Inherent Features for Point Machines
- Electro-mechanical. A point machine is a typical mechanical or electro-mechanical device; it is often driven by an AC or DC motor, and outputs the displacement of the throw slide with the aid of mechanical drive mechanisms. In addition, its structure is non-redundant, that is to say, each component is indispensable to realization of the point machine’s required functions.
- Limited space. The majority of point machines are tailored products. Limited space is a basic attribute, as they need to be convenient for transportation and maintenance. This advantage, however, means that there is limited remaining space inside the point machine, making it challenging to fix and to a certain extent relying on sensing units to determine maintenance needs.
- Complexity. The electro-mechanical components make a point machine’s structure complex, comprising many mechanical, electrical and even hydraulic or pneumatic items that can potentially cause diverse fault modes. The include single faults, compound faults, intermittent faults, and NFF (no fault found) failures. Furthermore, the constituent parts can vary quite considerably in terms of their failure probability, and these failure probabilities are normally very low. As a result, gathering all possible fault data is extremely difficult.
- Variety. Point machines come in three main types: electro-mechanical, electro-hydraulic, and electro-pneumatic [53,54]. Each type has unique parameters. For example, electro-mechanical point machines focus on throwing force and motor power, while electro-hydraulic ones mainly consider the hydraulic system pressure.Second, these three types have different failure mode distributions. Electro-mechanical point machines commonly experience wear and transmission component fractures, electro-hydraulic ones are prone to oil leakage, and electro-pneumatic ones often face pneumatic subsystem-related issues.Furthermore, various subtypes exist within each type to meet specific turnout requirements. These subtypes can vary in their motor type, output force, length and displacement distance of the throw slide detection slide, locking mode, etc. For instance, the China Railway Signal and Communication Corporation produces over forty specific subtypes of the ZDJ9 electro-mechanical point machine; among these, the throwing force range is between 2.5 kN and 4.5 kN, the displacement distance of the throw slide ranges from 80 mm to 220 mm, and the same figure for the detection slide varies from 75 mm to 170 mm. It should be noted that these slight discrepancies need to be taken very seriously.
- Individual differences. Even within a subclass, there may be non-negligible differences in point machines due to production errors. More significantly, differences may result from external factors such as action frequency, ambient temperature and humidity, electromagnetic interference, and train impacts with varying speeds. As a result, the switching resistance between individual machines can very. This variation in the duration of point machine movements exists within a specific range. It is important to recognize that every individual point machine has its own unique behavior due to slight individual differences and diverse external impacts.
4.3. External Impacts for Point Machines
- Rolling stock and operational planning. The complete structure and compliant dimensional parameters of the turnout determine the safe and reliable passage of trains. Deviation of the geometry or component damage of a turnout may make the point machine unable to work normally, e.g., rail creeping, alignment of switch rails, and rail wear. Train passage through turnouts can generate significant impact loads, especially during wheel–rail transitions in the switch and crossing zones, resulting in high vertical and horizontal loads [55]. In [56], a numerical investigation reported maximum lateral displacements of up to 5 mm and variations of up to 8 mm in high-speed rail. Table 4 shows the vertical displacement of CRH2 EMU after passing through the turnout at a speed of 250 km/h. In fact, the extent of displacement depends on the condition of the point machine, track, and traffic characteristics such as the speed, axle load, and train formation. Operation plans, including train passing frequencies, influence geometric parameters and turnout frame integrity. Train-related events, encompassing rolling stock and operation plans, provide essential insights into the mechanical system’s stability.
- Service environment. Point machines operate in diverse service environments influenced by geographical factors such as location, latitude, longitude, and ocean currents. These environments can range from extreme heat during the day to sharp temperature drops at night. For instance, Chinese railway regulations require point machines to function in temperatures ranging from −40 °C to +70 °C. A prime example are the CTS2 point machines installed on the Qinghai–Tibet Railway, which operate in cold high-altitude areas.In certain cases, railways traverse challenging environments, such as the Saudi Arabian Railway across desert terrain known for its harsh climate and abrasive sand and wind. Polar regions with heavy snowfall pose challenges for point machines as well. Despite implementing protective measures, extreme climates can accelerate performance degradation. Additionally, point machine adjustments made at night may become inaccurate during the day due to changing conditions.
4.4. Requirements for Point Machines Condition Monitoring & Fault Detection System
- Req. 1: Trustworthiness. Any software and hardware equipped with point machines should be trustworthy. Data-driven models, while achieving impressive results, pose difficulties in terms of understanding their internal mechanisms, as most data-driven models function as “black box” models. However, commercialization necessitates clear explanations about how the models learn, what knowledge they acquire, their decision-making rationale, and the level of trustworthiness they offer. Hence, it is highly recommended that point machine fault detection systems be built on a trustworthy foundation, including both software and hardware. The most important thing is to ensure the interpretability of AI models and the trustworthiness of their outcomes.
- Req. 2: Handling multi-source data. Because a single modality provides incomplete insights into the overall condition of point machines [7], even though the force and the current and power signals can best reflect the point machine’s states [2,3], it is highly suggested that point machine fault detection systems effectively integrate data from various sensors in order to comprehensively monitor the state of point machines in terms of Req. 1 and IF 1 of point machines. In addition, certain special scenarios such as sensor failure and parameter offset need to be considered.
- Req. 3: Designing and deploying sensors. Due to the Req. 1, IF 2, and EI 2, reliable, high-accuracy, compact, and interference-free sensors should be favored in point machines, particularly non-intrusive and “plug and play” (easily and quickly interchangeable) types. Thus, it is highly recommended to design suitable sensors and to use a reasonable layout.
- Req. 4: Handling imbalanced data. In light of IFs 3 and 4, practical point machine fault detection problems face extremely imbalanced datasets (i.e., with over 99% normal samples and less than 1% abnormal). Furthermore, abnormal data contain a variety of fault types. Because imbalanced datasets are detrimental to model training for data-driven methods [58,59], leading to bad performance on fault detection, this is an urgent and critical requirement.
- Req. 5: Handling unseen and complex fault modes. Rethinking IFs 3 and 4 of point machines, there are theoretically a number of different fault types for point machines. It is almost impossible to gather all the fault data, as not all faults occur during real operations, especially for new railway lines without historical data. Despite this, unrecorded or unseen faults can affect the determination of the classification boundary between normal and abnormal data. As a result, it is suggested that the system be able to handle both unseen and complex fault modes, even though this is a difficult task.
- Req. 6: Handling part-level fault modes. Considering IF 4 of point machines in combination with the literature survey, electro-pneumatic point machines, which are commonly used in turnout areas and marshaling yards, have received limited attention from researchers. Moreover, scholars have overlooked fault detection for specific parts, such as the retarder, throw rod, and switch circuit controller [60]. However, every part within a point machine is crucial, as all lack redundancy. Previously, researchers have mistakenly taken the current, power, or other condition monitoring parameters as an overall performance indicator for point machines. To enhance precision, there is a need to shift focus towards detecting faults at the part level, such as hydraulic cylinders [61] and bearings [62] under daily loads.
- Req. 7: Universality, generalization, and robustness. Based on IFs 4 and 5 and EIs 1 and 2, developing a model with high universality, generalization, and robustness is recommended. More precisely, a highly universal model can operate on different types and models of point machines without the need for individual model training in each case, which reduces the costs of system deployment and maintenance while allowing the model to be used across a wider railway network. Strong generalization capabilities imply that the model performs well even when facing new and previously unseen fault patterns or environmental conditions. In addition, a robust model maintains stable performance when dealing with noise, interference, sensor failures, and changes in environmental conditions. This means that the model can reliably perform fault detection even in complex real-world operating environments, thereby reducing the and .
- Req. 8: Maintaining fault detection performance over time. Considering Req. 2, IFs 4 and 5, and EIs 1 and 2, more and more observations (e.g., unanticipated fault modes, numerical accumulations) need to be collected throughout the whole life cycle of a point machine while accounting for the changing service environment and imposed time-dependent operation plans. Hence, it is of great importance to ensure that the fault detection model remains effective over time until it can be replaced with a new one.
5. Urgent Problems and Challenges
6. Blueprint
7. Conclusions
- Compared to traditional machine learning, deep learning-based algorithms exhibit the capability to autonomously learn features from massive datasets and efficiently detect faults. Notably, they have demonstrated remarkable potential for point machine fault detection. There is considerable room for further exploration of deep learning in point machine fault detection direction. Moreover, the diverse nature of the relevant datasets mandates flexibility in selecting appropriate fault detection algorithms. While supervised learning methods excel when abundant labeled data are available, scenarios involving data scarcity or incompleteness can benefit from the utilization of semi-supervised and weakly supervised learning approaches. These techniques make efficient use of limited labeled data and abundant unlabeled data, thereby enhancing model performance. This flexibility empowers practitioners to choose the most suitable method based on the characteristics of the available data, ultimately achieving enhanced fault detection outcomes.
- Concerning evaluation metrics, the traditional accuracy metric is unsuitable for the imbalanced datasets inherent to the point machine fault detection task. Instead, emphasis is placed on other vital metrics such as the precision, recall, score, false alarm rate, and missed detection rate. These metrics provide a more accurate assessment of model performance, ensuring precise and reliable fault detection in practical railway applications.
- In the context of developing an intelligent point machine condition monitoring and fault detection system, it is imperative that the system exhibit trustworthiness, robustness, and a high degree of generalization and transferability. While there are eight essential requirements that need to be addressed, they come with varying degrees of priority. The core essence of most of these requirements is to effectively address the challenges posed by limited training data in diverse and complex operational scenarios.
- In terms of future directions, the field of point machine fault detection confronts several urgent challenges and opportunities. These encompass the application of trustworthy artificial intelligence methodologies to enhance model safety and reliability as well as the exploration of multi-sensor data fusion techniques to elevate detection precision. Moreover, imbalanced datasets, the presence of unseen and complex fault modes, and the need for fault detection at the device level remain critical challenges that researchers must tackle. Techniques such as data augmentation, transfer learning, and zero-shot learning hold promise for addressing these challenges and building robust models that can effectively detect various fault scenarios. In addition, building fault detection models with high generalization ability is necessary. Models must be capable of adapting to changing environments, accumulating data over time, and maintaining their performance throughout the long service life of point machines.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Xu, S.; Chen, C.; Lin, Z.; Zhang, X.; Dai, J.; Liu, L. Review and prospect of maintenance technology for traction system of high-speed train. Transp. Saf. Environ. 2021, 3, tdab017. [Google Scholar] [CrossRef]
- Hamadache, M.; Dutta, S.; Olaby, O.; Ambur, R.; Stewart, E.; Dixon, R. On the fault detection and diagnosis of railway switch and crossing systems: An overview. Appl. Sci. 2019, 9, 5129. [Google Scholar] [CrossRef]
- García Márquez, F.P.; Roberts, C.; Tobias, A.M. Railway point mechanisms: Condition monitoring and fault detection. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit 2010, 224, 35–44. [Google Scholar] [CrossRef]
- Hamarat, M.Z.; Silvast, M.; Kaewunruen, S. 15—Railway turnouts and inspection technologies. In Rail Infrastructure Resilience; Woodhead Publishing Series in Civil and Structural Engineering; Calçada, R., Kaewunruen, S., Eds.; Woodhead Publishing: Cambridge, UK, 2022; pp. 319–340. [Google Scholar] [CrossRef]
- Kaewunruen, S. Monitoring structural deterioration of railway turnout systems via dynamic wheel/rail interaction. Case Stud. Nondestruct. Test. Eval. 2014, 1, 19–24. [Google Scholar] [CrossRef]
- Meymand, S.Z.; Keylin, A.; Ahmadian, M. A survey of wheel–rail contact models for rail vehicles. Veh. Syst. Dyn. 2016, 54, 386–428. [Google Scholar] [CrossRef]
- Atamuradov, V.; Medjaher, K.; Camci, F.; Dersin, P.; Zerhouni, N. Railway Point Machine Prognostics Based on Feature Fusion and Health State Assessment. IEEE Trans. Instrum. Meas. 2019, 68, 2691–2704. [Google Scholar] [CrossRef]
- Chen, Q.; Nicholson, G.; Roberts, C.; Ye, J.; Zhao, Y. Improved fault diagnosis of railway switch system using energy-based thresholding wavelets (EBTW) and neural networks. IEEE Trans. Instrum. Meas. 2020, 70, 1–12. [Google Scholar] [CrossRef]
- Xu, T.; Wang, G.; Wang, H.; Yuan, T.; Zhong, Z. Gap measurement of point machine using adaptive wavelet threshold and mathematical morphology. Sensors 2016, 16, 2006. [Google Scholar] [CrossRef]
- Li, C.; Zhao, L. A Railway Turnout Closeness Monitoring Method Based on Switch Gap Images. IEEE Intell. Transp. Syst. Mag. 2021, 14, 214–229. [Google Scholar] [CrossRef]
- Li, C.; Zhao, L. CACC-RF-based Risk Prediction of Railway Switch Gap Jam Fault. J. China Railw. Soc. 2022, 44, 46–55. [Google Scholar]
- Chen, X.; Hu, X.; Wen, T.; Cao, Y. Vibration Signal-Based Fault Diagnosis of Railway Point Machines via Double-Scale CNN. Chin. J. Electron. 2023, 32, 972–981. [Google Scholar] [CrossRef]
- Liu, J.; Wen, T.; Xie, G.; Cao, Y. Modified multi-scale symbolic dynamic entropy and fuzzy broad learning-based fast fault diagnosis of railway point machines. Transp. Saf. Environ. 2022, 5, tdac065. [Google Scholar] [CrossRef]
- Hamadache, M.; Dutta, S.; Ambur, R.; Olaby, O.; Stewart, E.; Dixon, R. Residual-based fault detection method: Application to railway switch & crossing (S&C) system. In Proceedings of the 2019 19th International Conference on Control, Automation and Systems (ICCAS), Jeju, Republic of Korea, 15–18 October 2019; pp. 1228–1233. [Google Scholar]
- Fidali, M.; Wojciechowski, P.; Pełka, A. Fault Detection of Railway Point Machine Using Diagnostic Models. In Advances in Technical Diagnostics, Proceedings of the 6th International Congress on Technical Diagnostic, ICDT2016, Gliwice, Poland, 12–16 September 2016; Springer: Berlin/Heidelberg, Germany, 2016; pp. 275–285. [Google Scholar]
- Beck, J.V.; Arnold, K.J. Parameter Estimation in Engineering and Science; James Beck: New York, NY, USA, 1977. [Google Scholar]
- Adachi, H.; Kikuchi, M.; Watanabe, Y. Electric switch machine failure detection using data-mining technique. Q. Rep. Rtri 2006, 47, 182–186. [Google Scholar] [CrossRef][Green Version]
- Silverman, B.W. Density Estimation for Statistics and Data Analysis; Routledge: New York, NY, USA, 2018. [Google Scholar]
- Fink, O.; Zio, E.; Weidmann, U. Novelty detection by multivariate kernel density estimation and growing neural gas algorithm. Mech. Syst. Signal Process. 2015, 50, 427–436. [Google Scholar] [CrossRef]
- Huang, S.; Zhang, F.; Yu, R.; Chen, W.; Hu, F.; Dong, D. Turnout fault diagnosis through dynamic time warping and signal normalization. J. Adv. Transp. 2017, 2017, 3192967. [Google Scholar] [CrossRef]
- Ji, W.; Zuo, Y.; Hei, X.; Sei, T.; Hideo, N. An Intelligent Fault Diagnosis Method Based on FastDTW for Railway Turnout. Pattern Recognit. Artif. Intell. 2020, 33, 1013–1022. [Google Scholar]
- Cui, K.; Tang, M.; Ou, D. Simulation data generating algorithm for railway turnout fault diagnosis in big data maintenance management system. In International Symposium for Intelligent Transportation and Smart City (ITASC) 2019 Proceedings (ITASC 2019). Smart Innovation, Systems and Technologies; Springer: Berlin/Heidelberg, Germany, 2019; pp. 155–166. [Google Scholar]
- García, F.P.; Pedregal, D.J.; Roberts, C. Time series methods applied to failure prediction and detection. Reliab. Eng. Syst. Saf. 2010, 95, 698–703. [Google Scholar] [CrossRef]
- Pedregal, D.J.; García, F.P.; Roberts, C. An algorithmic approach for maintenance management based on advanced state space systems and harmonic regressions. Ann. Oper. Res. 2009, 166, 109–124. [Google Scholar] [CrossRef]
- Mistry, P.; Lane, P.; Allen, P. Railway point-operating machine fault detection using unlabeled signaling sensor data. Sensors 2020, 20, 2692. [Google Scholar] [CrossRef]
- Li, Z.; Yin, Z.; Tang, T.; Gao, C. Fault diagnosis of railway point machines using the locally connected autoencoder. Appl. Sci. 2019, 9, 5139. [Google Scholar] [CrossRef]
- Guzman, D.N.; Hadzic, E.; Baasch, B.; Heusel, J.; Neumann, T.; Schrijver, G.; Buursma, D.; Groos, J.C. Anomaly Detection and Forecasting Methods Applied to Point Machine Monitoring Data for Prevention of Railway Switch Failures. In Advances in Asset Management and Condition Monitoring; Springer: Berlin/Heidelberg, Germany, 2020; pp. 307–318. [Google Scholar]
- Khan, S.S.; Madden, M.G. A survey of recent trends in one class classification. In Artificial Intelligence and Cognitive Science, Proceedings of the 20th Irish Conference (AICS 2009), Dublin, Ireland, 19–21 August 2009; Springer: Berlin/Heidelberg, Germany, 2009; pp. 188–197. [Google Scholar]
- Khan, S.S.; Madden, M.G. One-class classification: Taxonomy of study and review of techniques. Knowl. Eng. Rev. 2014, 29, 345–374. [Google Scholar] [CrossRef]
- Zhong, Z.; Chen, J.; Tang, T.; Xu, T.; Wang, F. SVDD-Based Research on Railway-Turnout Fault Detection and Health Assessment. J. Southwest Jiaotong Univ. 2018, 53, 842–849. [Google Scholar]
- Wang, J.; Xu, T.; Chen, C. Abnormal detection of switch machine operation state based on improved support vector domain description. Railw. Comput. Appl. 2019, 28, 1–6+11. [Google Scholar]
- Vileiniskis, M.; Remenyte-Prescott, R.; Rama, D. A fault detection method for railway point systems. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit 2016, 230, 852–865. [Google Scholar] [CrossRef]
- Eker, O.F.; Camci, F.; Kumar, U. Failure diagnostics on railway turnout systems using support vector machines. In Proceedings of the International Workshop and Congress on eMaintenance, Luleå, Sweden, 22–24 June 2010; pp. 248–251. [Google Scholar]
- Eker, O.; Camci, F.; Kumar, U. SVM based diagnostics on railway turnouts. Int. J. Perform. Eng. 2012, 8, 289. [Google Scholar]
- Lee, J.; Kim, A.; Park, D.; Chung, Y. Noise-Robust Anomaly Detection of Railway Point Machine using Modulation Technique. Smart Media J. 2017, 6, 9–16. [Google Scholar]
- Hastie, T.; Tibshirani, R.; Friedman, J.H.; Friedman, J.H. The Elements of Statistical Learning: Data Mining, Inference, and Prediction; Springer: Berlin/Heidelberg, Germany, 2009; Volume 2. [Google Scholar]
- Wright, N.P.; Gan, R.; McVae, C. Software and machine learning tools for monitoring railway track switch performance. In Proceedings of the 7th IET Conference on Railway Condition Monitoring 2016 (RCM 2016), Birmingham, UK, 27–28 September 2016; pp. 1–7. [Google Scholar] [CrossRef]
- Sachan, S.; Donchak, N. Multi-Segment Deep Convolution Neural Networks for Classification of Faults in Sensors at Railway Point Systems. In Proceedings of the 2019 25th International Conference on Automation and Computing (ICAC), Lancaster, UK, 5–7 September 2019; pp. 1–6. [Google Scholar]
- Schlegl, T.; Seeböck, P.; Waldstein, S.M.; Schmidt-Erfurth, U.; Langs, G. Unsupervised anomaly detection with generative adversarial networks to guide marker discovery. In Proceedings of the International Conference on Information Processing in Medical Imaging, Boone, NC, USA, 25–30 June 2017; pp. 146–157. [Google Scholar]
- Zenati, H.; Romain, M.; Foo, C.S.; Lecouat, B.; Chandrasekhar, V. Adversarially learned anomaly detection. In Proceedings of the 2018 IEEE International Conference on Data Mining (ICDM), Singapore, 17–20 November 2018; pp. 727–736. [Google Scholar]
- Xue, L.; Gao, S. Unsupervised anomaly detection system for railway turnout based on GAN. J. Phys. Conf. Ser. 2019, 1345, 032069. [Google Scholar] [CrossRef]
- An, J.; Cho, S. Variational autoencoder based anomaly detection using reconstruction probability. Spec. Lect. IE 2015, 2, 1–18. [Google Scholar]
- Guo, Z.; Ye, H.; Dong, W.; Yan, X.; Ji, Y. A Fault Detection Method for Railway Point Machine Operations Based On Stacked Autoencoders. In Proceedings of the 2018 24th International Conference on Automation and Computing (ICAC), Newcastle upon Tyne, UK, 6–7 September 2018; pp. 1–6. [Google Scholar]
- Guo, Z.; Ye, H.; Jiang, M.; Sun, X. An enhanced fault detection method for railway turnouts incorporating prior faulty information. In Proceedings of the 2020 IEEE 23rd International Conference on Intelligent Transportation Systems (ITSC), Rhodes, Greece, 20–23 September 2020; pp. 1–6. [Google Scholar]
- Zhuang, Z.; Zhang, G.; Dong, W.; Sun, X.; Wang, C. Intelligent fault detection of high-speed railway turnout based on hybrid deep learning. In AI 2018: Advances in Artificial Intelligence; Springer: Berlin/Heidelberg, Germany, 2018; pp. 98–103. [Google Scholar]
- Guo, Z.; Wan, Y.; Ye, H. An unsupervised fault-detection method for railway turnouts. IEEE Trans. Instrum. Meas. 2020, 69, 8881–8901. [Google Scholar] [CrossRef]
- da Silva Ferreira, M.; Vismari, L.F.; Cugnasca, P.S.; de Almeida, J.R.; Camargo, J.B.; Kallemback, G. A comparative analysis of unsupervised learning techniques for anomaly detection in railway systems. In Proceedings of the 2019 18th IEEE International Conference On Machine Learning And Applications (ICMLA), Raton, FL, USA, 16–19 December 2019; pp. 444–449. [Google Scholar]
- Merz, C.J.; Clair, D.S.; Bond, W.E. Semi-supervised adaptive resonance theory (smart2). In Proceedings of the IJCNN International Joint Conference on Neural Networks, Beijing, China, 3–6 November 1992; Volume 3, pp. 851–856. [Google Scholar]
- Ham, S.; Han, Q. Review of semi-supervised learning research. Comput. Eng. Appl. 2020, 56, 19–27. [Google Scholar]
- Shi, Z.S.; Du, Y.; Du, T.; Shan, G. The Turnout Abnormality Diagnosis Based on Semi-Supervised Learning Method. Int. J. Softw. Eng. Knowl. Eng. 2020, 30, 961–976. [Google Scholar] [CrossRef]
- Davari, N.; Veloso, B.; Costa, G.d.A.; Pereira, P.M.; Ribeiro, R.P.; Gama, J. A survey on data-driven predictive maintenance for the railway industry. Sensors 2021, 21, 5739. [Google Scholar] [CrossRef] [PubMed]
- Hu, X.; Cao, Y.; Tang, T.; Sun, Y. Data-driven technology of fault diagnosis in railway point machines: Review and challenges. Transp. Saf. Environ. 2022, 4, tdac036. [Google Scholar] [CrossRef]
- Atamuradov, V.; Camci, F.; Baskan, S.; Sevkli, M. Failure diagnostics for railway point machines using expert systems. In Proceedings of the 2009 IEEE International Symposium on Diagnostics for Electric Machines, Power Electronics and Drives, Vigo, Spain, 31 August–3 September 2009; pp. 1–5. [Google Scholar] [CrossRef]
- Atamuradov, V.; Medjaher, K.; Camci, F.; Zerhouni, N.; Dersin, P.; Lamoureux, B. Feature selection and fault-severity classification–based machine health assessment methodology for point machine sliding-chair degradation. Qual. Reliab. Eng. Int. 2019, 35, 1081–1099. [Google Scholar] [CrossRef]
- Kassa, E.; Nielsen, J.C. Dynamic train–turnout interaction in an extended frequency range using a detailed model of track dynamics. J. Sound Vib. 2009, 320, 893–914. [Google Scholar] [CrossRef]
- Wang, P.; Ma, X.; Wang, J.; Xu, J.; Chen, R. Optimization of rail profiles to improve vehicle running stability in switch panel of high-speed railway turnouts. Math. Probl. Eng. 2017, 2017, 2856030. [Google Scholar] [CrossRef]
- He, K.; Zhang, Q. High Speed Railway Turnout; China Railway Press: Beijing, China, 2011. [Google Scholar]
- Chawla, N.V. Data mining for imbalanced datasets: An overview. In Data Mining and Knowledge Discovery Handbook; Springer: Boston, MA, USA, 2009; pp. 875–886. [Google Scholar]
- Ganganwar, V. An overview of classification algorithms for imbalanced datasets. Int. J. Emerg. Technol. Adv. Eng. 2012, 2, 42–47. [Google Scholar]
- Hu, X.; Cao, Y.; Sun, Y.; Tang, T. Railway Automatic Switch Stationary Contacts Wear Detection Under Few-Shot Occasions. IEEE Trans. Intell. Transp. Syst. 2021, 23, 14893–14907. [Google Scholar] [CrossRef]
- Shanbhag, V.V.; Meyer, T.J.J.; Caspers, L.W.; Schlanbusch, R. Failure Monitoring and Predictive Maintenance of Hydraulic Cylinder—State-of-the-Art Review. IEEE/ASME Trans. Mechatron. 2021, 26, 3087–3103. [Google Scholar] [CrossRef]
- Li, G.; Wu, J.; Deng, C.; Xu, X.; Shao, X. Deep Reinforcement Learning-Based Online Domain Adaptation Method for Fault Diagnosis of Rotating Machinery. IEEE/ASME Trans. Mechatron. 2022, 27, 2796–2805. [Google Scholar] [CrossRef]
- Liang, W.; Tadesse, G.A.; Ho, D.; Fei-Fei, L.; Zaharia, M.; Zhang, C.; Zou, J. Advances, challenges and opportunities in creating data for trustworthy AI. Nat. Mach. Intell. 2022, 4, 669–677. [Google Scholar] [CrossRef]
- Arrieta, A.B.; Díaz-Rodríguez, N.; Del Ser, J.; Bennetot, A.; Tabik, S.; Barbado, A.; García, S.; Gil-López, S.; Molina, D.; Benjamins, R.; et al. Explainable Artificial Intelligence (XAI): Concepts, taxonomies, opportunities and challenges toward responsible AI. Inf. Fusion 2020, 58, 82–115. [Google Scholar] [CrossRef]
- Das, A.; Rad, P. Opportunities and challenges in explainable artificial intelligence (xai): A survey. arXiv 2020, arXiv:2006.11371. [Google Scholar]
- Kaur, D.; Uslu, S.; Rittichier, K.J.; Durresi, A. Trustworthy artificial intelligence: A review. ACM Comput. Surv. (CSUR) 2022, 55, 1–38. [Google Scholar] [CrossRef]
- Li, B.; Qi, P.; Liu, B.; Di, S.; Liu, J.; Pei, J.; Yi, J.; Zhou, B. Trustworthy AI: From principles to practices. ACM Comput. Surv. 2023, 55, 1–46. [Google Scholar] [CrossRef]
- Fan, Z.; Zhu, Y.; He, Y.; Sun, Q.; Liu, H.; He, J. Deep learning on monocular object pose detection and tracking: A comprehensive overview. arXiv 2021, arXiv:2105.14291. [Google Scholar] [CrossRef]
- Fan, Z.; Liu, H.; He, J.; Zhang, M.; Du, X. MPDNet: A 3D Missing Part Detection Network Based on Point Cloud Segmentation. In Proceedings of the ICASSP 2021—2021 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Virtual, 6–12 June 2021; pp. 1810–1814. [Google Scholar]
- Khaleghi, B.; Khamis, A.; Karray, F.O.; Razavi, S.N. Multisensor data fusion: A review of the state-of-the-art. Inf. Fusion 2013, 14, 28–44. [Google Scholar] [CrossRef]
- Duan, Z.; Wu, T.; Guo, S.; Shao, T.; Malekian, R.; Li, Z. Development and trend of condition monitoring and fault diagnosis of multi-sensors information fusion for rolling bearings: A review. Int. J. Adv. Manuf. Technol. 2018, 96, 803–819. [Google Scholar] [CrossRef]
- Erhan, D.; Courville, A.; Bengio, Y.; Vincent, P. Why does unsupervised pre-training help deep learning? In Proceedings of the Thirteenth International Conference on Artificial Intelligence and Statistics, Sardinia, Italy, 13–15 May 2010; pp. 201–208. [Google Scholar]
- Hendrycks, D.; Lee, K.; Mazeika, M. Using pre-training can improve model robustness and uncertainty. In Proceedings of the International Conference on Machine Learning, Long Beach, CA, USA, 9–15 June 2019; pp. 2712–2721. [Google Scholar]
- Li, L.; Fan, Y.; Tse, M.; Lin, K.Y. A review of applications in federated learning. Comput. Ind. Eng. 2020, 149, 106854. [Google Scholar] [CrossRef]
- Khan, L.U.; Saad, W.; Han, Z.; Hossain, E.; Hong, C.S. Federated Learning for Internet of Things: Recent Advances, Taxonomy, and Open Challenges. IEEE Commun. Surv. Tutor. 2021, 23, 1759–1799. [Google Scholar] [CrossRef]
- Van Dyk, D.A.; Meng, X.L. The art of data augmentation. J. Comput. Graph. Stat. 2001, 10, 1–50. [Google Scholar] [CrossRef]
- Chang, L.; Lin, Y.H. Meta-Learning With Adaptive Learning Rates for Few-Shot Fault Diagnosis. IEEE/ASME Trans. Mechatron. 2022, 27, 5948–5958. [Google Scholar] [CrossRef]
- Shorten, C.; Khoshgoftaar, T.M. A survey on image data augmentation for deep learning. J. Big Data 2019, 6, 1–48. [Google Scholar] [CrossRef]
- Antoniou, A.; Storkey, A.; Edwards, H. Data augmentation generative adversarial networks. arXiv 2017, arXiv:1711.04340. [Google Scholar]
- Weiss, K.; Khoshgoftaar, T.M.; Wang, D. A survey of transfer learning. J. Big Data 2016, 3, 1–40. [Google Scholar] [CrossRef]
- Zhang, W.; Li, X. Federated Transfer Learning for Intelligent Fault Diagnostics Using Deep Adversarial Networks With Data Privacy. IEEE/ASME Trans. Mechatron. 2022, 27, 430–439. [Google Scholar] [CrossRef]
- Wang, W.; Zheng, V.W.; Yu, H.; Miao, C. A survey of zero-shot learning: Settings, methods, and applications. ACM Trans. Intell. Syst. Technol. (TIST) 2019, 10, 1–37. [Google Scholar] [CrossRef]
- Ade, R.; Deshmukh, P. Methods for incremental learning: A survey. Int. J. Data Min. Knowl. Manag. Process 2013, 3, 119. [Google Scholar]
- Parisi, G.I.; Kemker, R.; Part, J.L.; Kanan, C.; Wermter, S. Continual lifelong learning with neural networks: A review. Neural Netw. 2019, 113, 54–71. [Google Scholar] [CrossRef]
- Gong, T.; Zhu, L.; Yu, F.R.; Tang, T. Edge Intelligence in Intelligent Transportation Systems: A Survey. IEEE Trans. Intell. Transp. Syst. 2023, 24, 8919–8944. [Google Scholar] [CrossRef]
- Li, C.; Yang, K.; Tang, H.; Wang, P.; Li, J.; He, Q. Fault diagnosis for rolling bearings of a freight train under limited fault data: Few-shot learning method. J. Transp. Eng. Part A Syst. 2021, 147, 04021041. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Designation | Description |
|---|---|
| Power supply | DC and AC electric motor, hand (rarely), etc. |
| Transmission mechanism | Mechanical, hydraulic, and pneumatic drives. |
| Throwing/reversing force | A broad range, typically up to 9 kN. |
| Retaining force | A wide variety. |
| Throwing time | Slow action: over 6 s; medium: 3 s to 6 s; fast action: not more than 0.8 s. |
| Stroke | Approximately ranging from 30 mm to 300 mm. |
| Product lifetime | Normally over one million throwing movements. |
| Locking system | External lock, internal lock. |
| Installation configuration | Track center and beside the tracks (right-hand or left-hand layouts); stock rail fixation and sleeper fixation (in-tie or on-tie). |
| Trailability | Trailable and non-trailable. |
| Environmental conditions | Operating temperature: −40 °C to +80 °C; humidity: up to 95%. |
| Degree of protection | Resistance to sand, dust, dirt, snow, meltwater, humidity, and flood water. |
| Weight & profile | Diversity. |
| Electrical interface | Various interlocking systems, e.g., single-drive (four wires, five wires) and multi-drive technology. |
| Turnout interface | No limitation on the types of turnouts. |
| No. | Part | Failure Mode | Effect | Safety Impact |
|---|---|---|---|---|
| 1 | Actuator | Short circuit or open circuit | Unable to move the turnout | No |
| Aging | Reducing operational efficiency | No | ||
| 2 | Drive mechanism | Wear and tear, slight deformation & jam (increased resistance) | Reducing operational efficiency | No |
| Mechanical fracture, significant deformation & complete jam | Unable to move the turnout | No | ||
| 3 | Switch circuit controller | Wear and tear, slight deformation & jam (increased resistance) | Reducing operational efficiency | No |
| Mechanical fracture, significant deformation & complete jam | Unable to move the turnout/train derailment | Possible | ||
| Short circuit or open circuit | Unable to move the turnout | Hardly | ||
| 4 | Throw slide | Wear and tear, slight deformation & jam (increased resistance) | Reducing operational efficiency | No |
| Mechanical fracture, significant deformation & complete jam | Unable to move the turnout/train derailment | Possible | ||
| 5 | Detection or locking slide | Wear and tear, slight deformation & jam (increased resistance) | Reducing operational efficiency | No |
| Mechanical fracture, significant deformation & complete jam | Train derailment | Yes | ||
| 6 | Housing | housing damage | Reducing operational efficiency/unable to move/train derailment | Low |
| Monitored Devices | Monitored Parameters | Type of Point Machines |
|---|---|---|
| Motor | Current, voltage, power, speed, torque | All motor-driven point machines |
| Gap | size | All |
| Throw rod | Throwing force, displacement, position, speed | All |
| Indication/detection rod | Displacement, position, speed | All |
| Locking rod | Gap size, locking depth, locking force | point machines equipped with internal locking devices |
| External locking devices | Gap size, locking force | point machines armed with external locking devices |
| The whole machine | Switching resistance, sound, vibration, temperature humidity, throwing time, change of movement direction | All |
| Switch circuit controller | Contact depth, rotation angle, contact pressure, contact resistance, opening thickness of stationary contact, thickness of movable contact ring, angular displacement/real-time angle/angular velocity of movable contact | Most of point machines made and used in China (ZD6, ZD(J)9, ZYJ7, ZK4) |
| Hydraulic device | Oil pressure, oil level, electro valve | Hydraulic transmission type point machines |
| Pneumatic device | Pneumatic pressure, electro valve | Pneumatic transmission type point machines |
| China Technical Turnout in Wuhan-Guangzhou Test Section | German Technical Turnout in Wuhan-Guangzhou Test Section | French Technical Turnout in Hefei-Nanjing Railway | |||
|---|---|---|---|---|---|
|
Sleeper No. |
Vertical Displacement |
Sleeper No. |
Vertical Displacement |
Sleeper No. |
Vertical Displacement |
| 10 | 0.62 mm | −3 | 0.84 mm | −3 | 0.33 mm |
| 28 | 0.76 mm | 10 | 0.46 mm | 13 | 0.37 mm |
| 37 | 0.65 mm | 27 | 0.99 mm | 27 | 0.1 mm |
| 47 | 0.44 mm | 44 | 0.96 mm | 50 | 0.56 mm |
| Point Machines | Condition Monitoring & Fault Detection System | ||||
|---|---|---|---|---|---|
| Req. | IF | EI | Req. | Difficulty | Suggested Priority Level |
| 1 | Trustworthy | Hard | High | ||
| 1 | 1 | Handling multi-source data | Easy | High | |
| 1 | 2 | 2 | Designing and deploying sensors | Moderate | High |
| 3, 4 | Handling imbalanced data | Moderate | Critical | ||
| 3, 4 | Handling unseen and complex fault modes | Hard | Medium | ||
| 4 | Handling part-level fault modes | Moderate | Medium | ||
| 4, 5 | 1, 2 | Universality & generalization and robustness | Moderate | Medium | |
| 2 | 5 | 1, 2 | Maintaining fault detection performance over time | Hard | Medium |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hu, X.; Tang, T.; Tan, L.; Zhang, H. Fault Detection for Point Machines: A Review, Challenges, and Perspectives. Actuators 2023, 12, 391. https://doi.org/10.3390/act12100391
Hu X, Tang T, Tan L, Zhang H. Fault Detection for Point Machines: A Review, Challenges, and Perspectives. Actuators. 2023; 12(10):391. https://doi.org/10.3390/act12100391
Chicago/Turabian StyleHu, Xiaoxi, Tao Tang, Lei Tan, and Heng Zhang. 2023. "Fault Detection for Point Machines: A Review, Challenges, and Perspectives" Actuators 12, no. 10: 391. https://doi.org/10.3390/act12100391
APA StyleHu, X., Tang, T., Tan, L., & Zhang, H. (2023). Fault Detection for Point Machines: A Review, Challenges, and Perspectives. Actuators, 12(10), 391. https://doi.org/10.3390/act12100391