
Fault Diagnosis for Aircraft Hydraulic Systems via One-Dimensional Multichannel Convolution Neural Network


Abstract
:1. Introduction
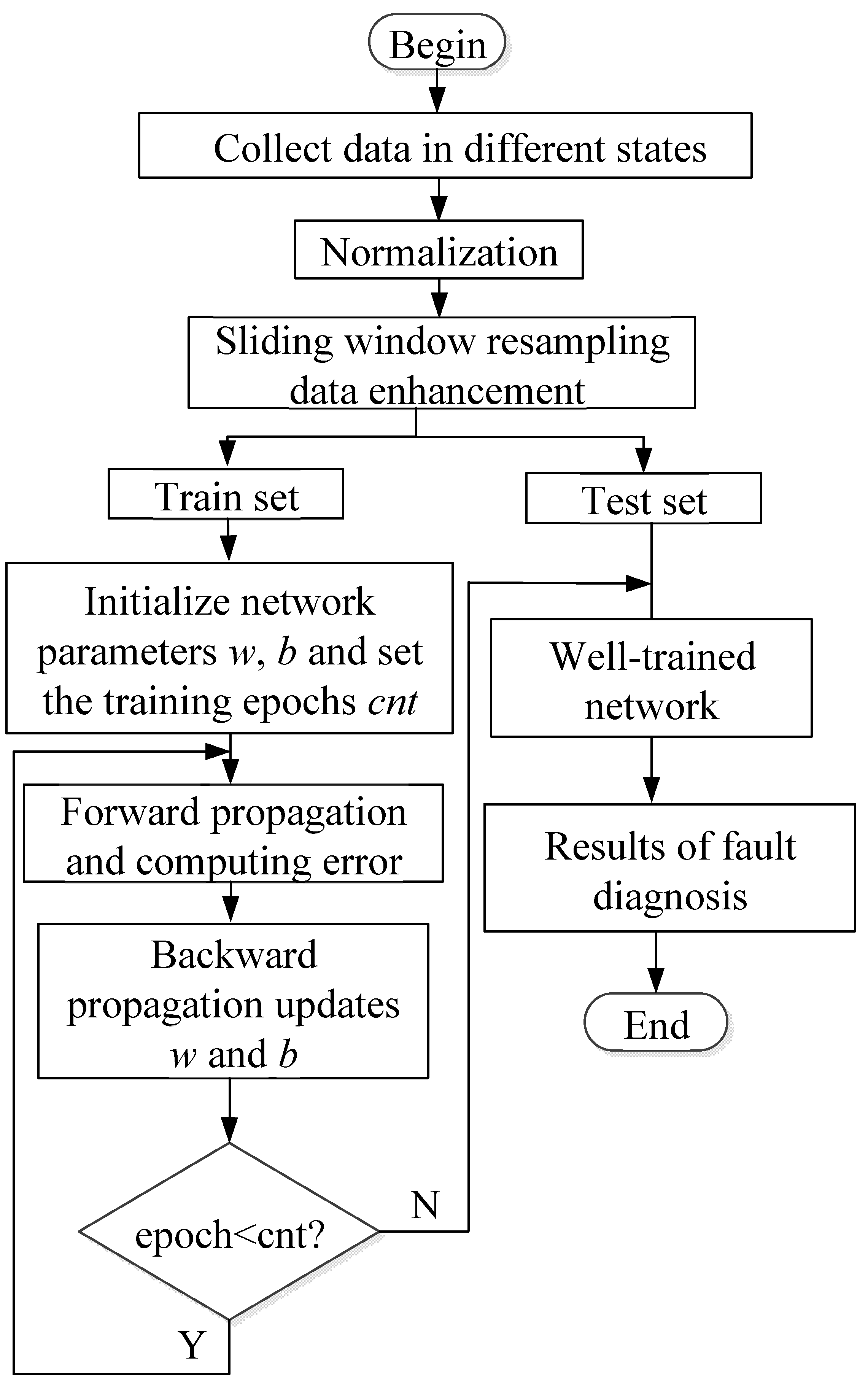
2. Fault Diagnoses Based on Improved 1DMCCNN Algorithm
2.1. One-Dimensional Convolution
2.2. One-Dimensional Pooling
2.3. Fault Diagnosis with CNN
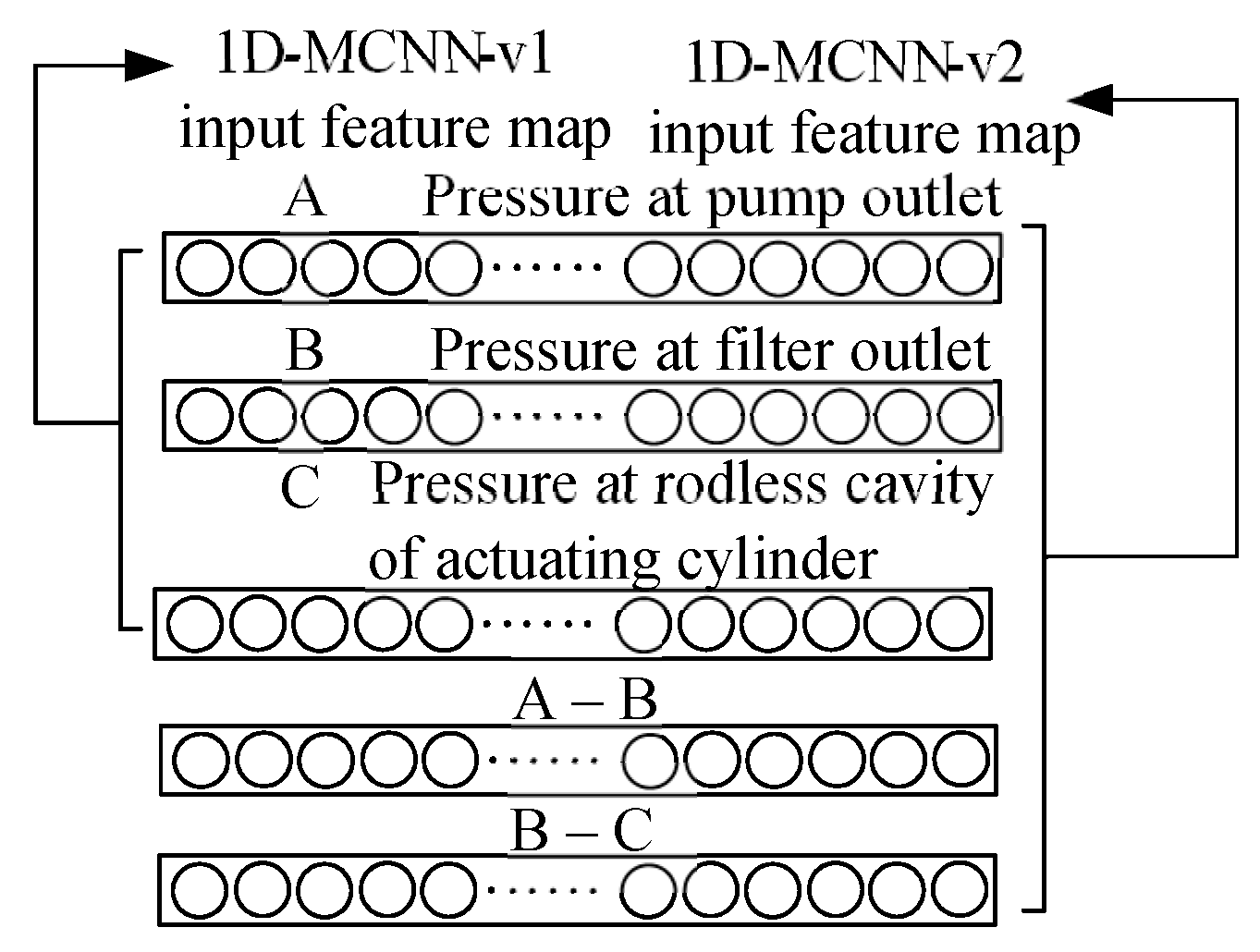
2.4. Multisensor Fusion
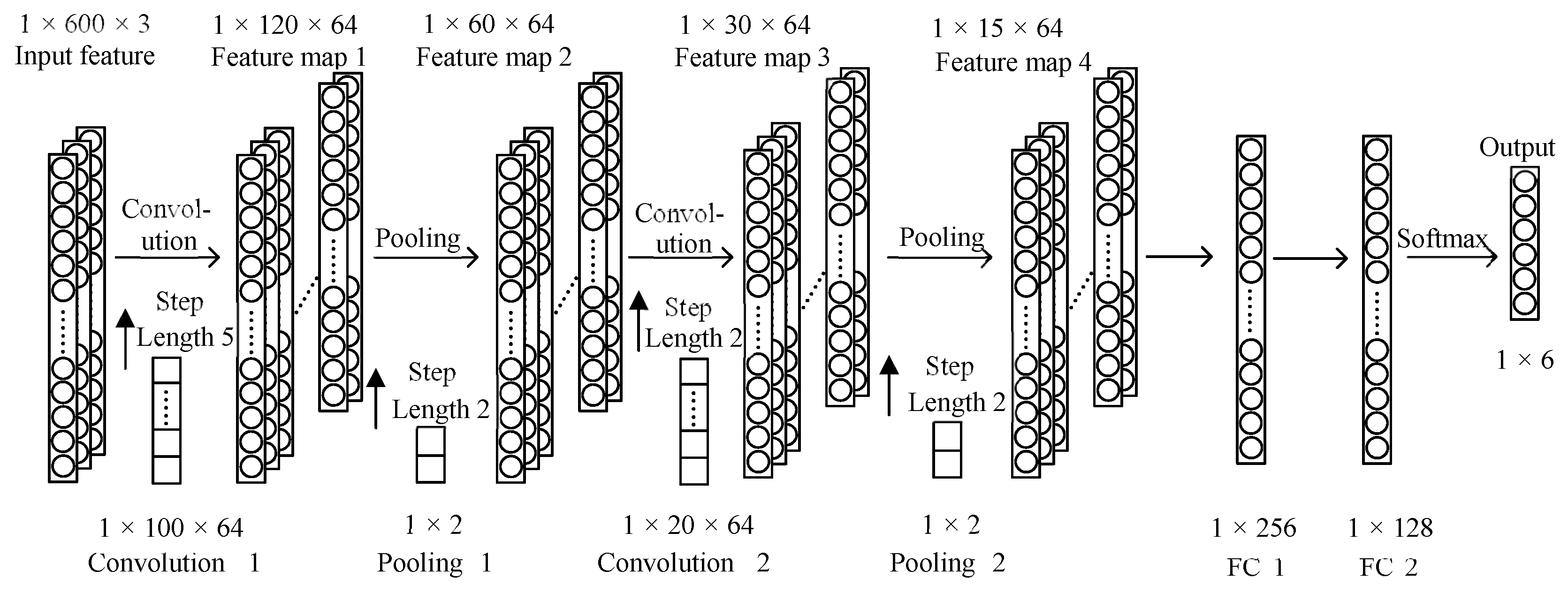
2.5. Structural Design and Improvement of 1DMCCNN
3. Simulations
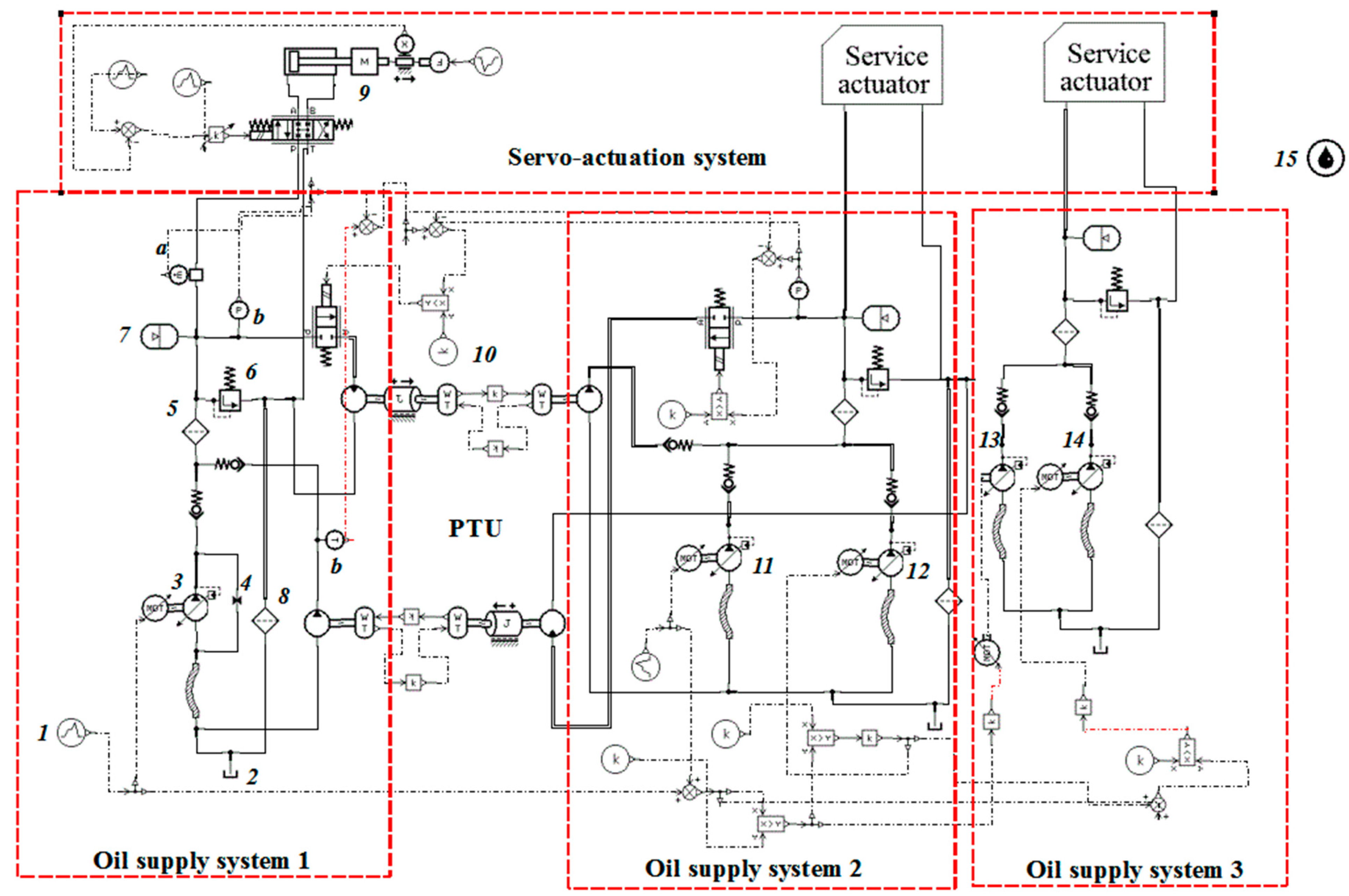
3.1. Normal Model
3.2. Fault Mode
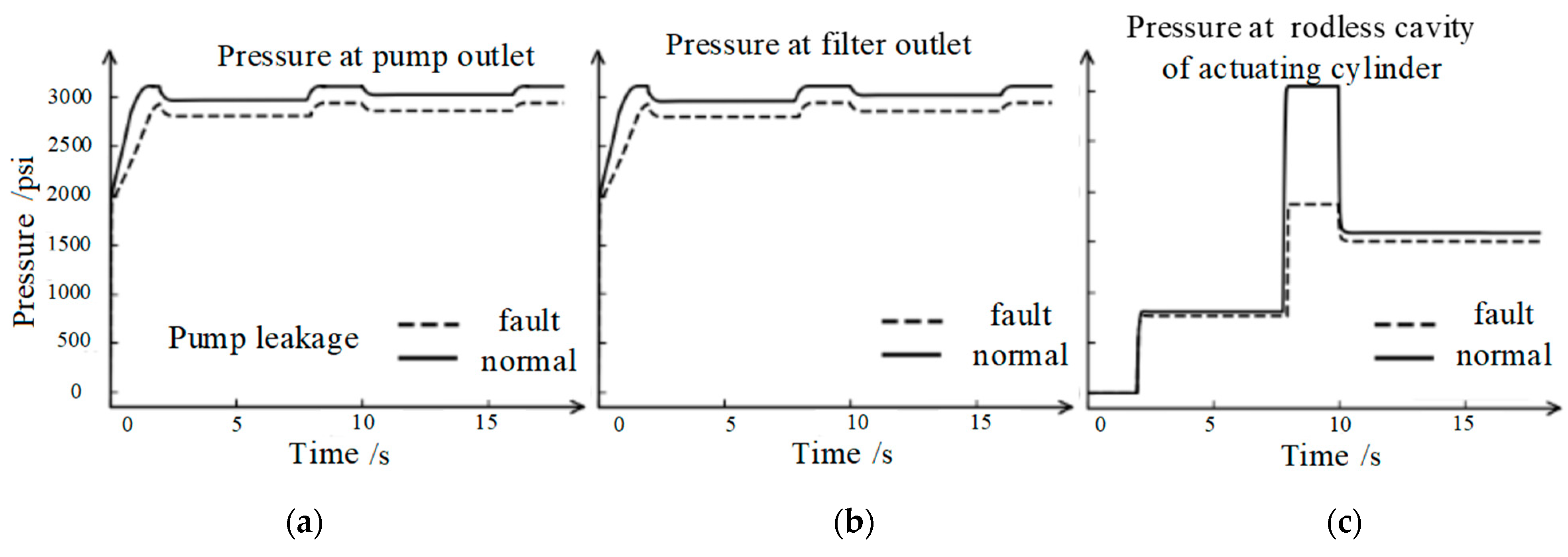
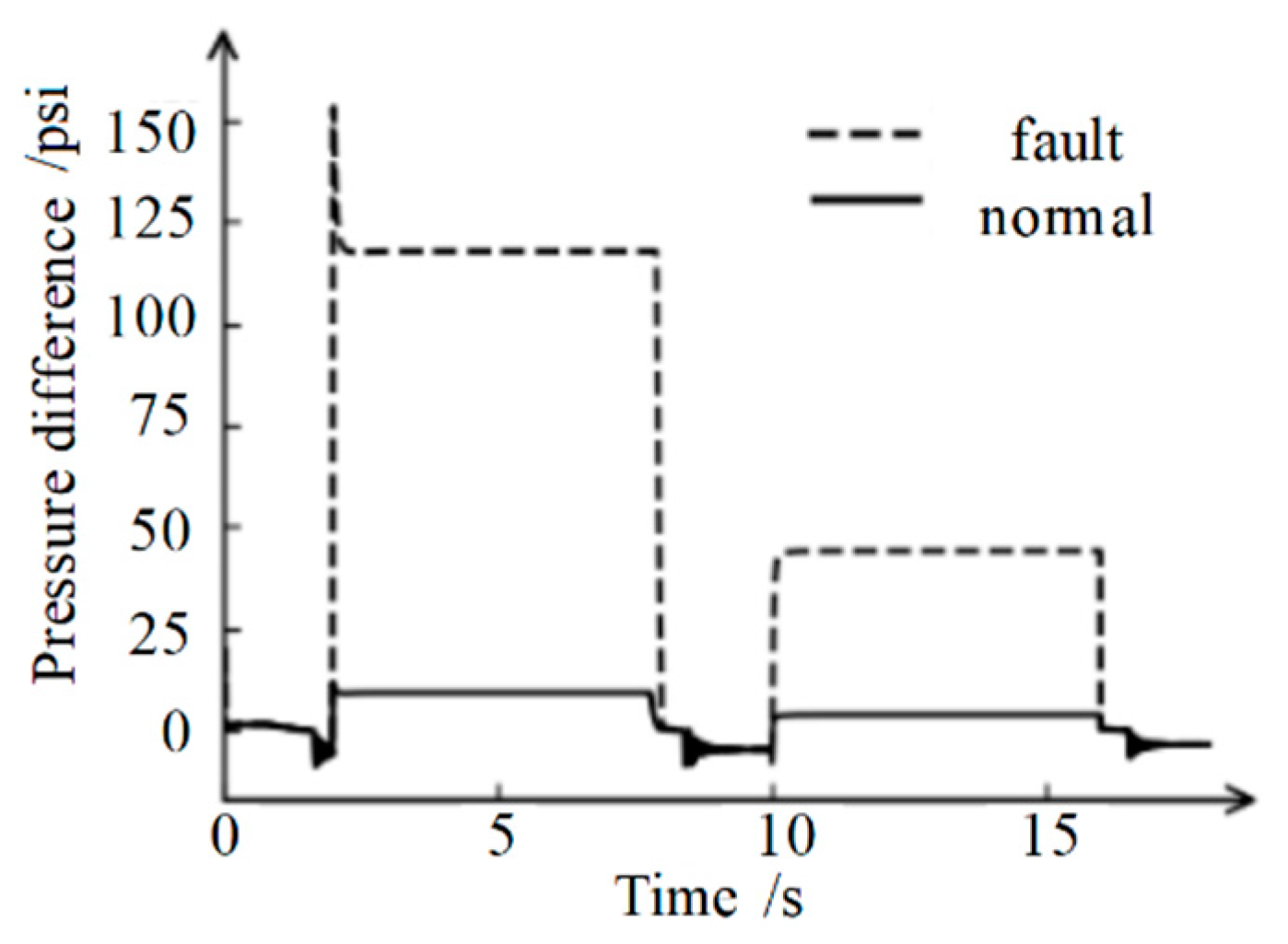
3.3. Simulation Results
4. Analyses and Comparison
4.1. Data Collection and Processing
4.2. Analysis of Fault Diagnosis Results
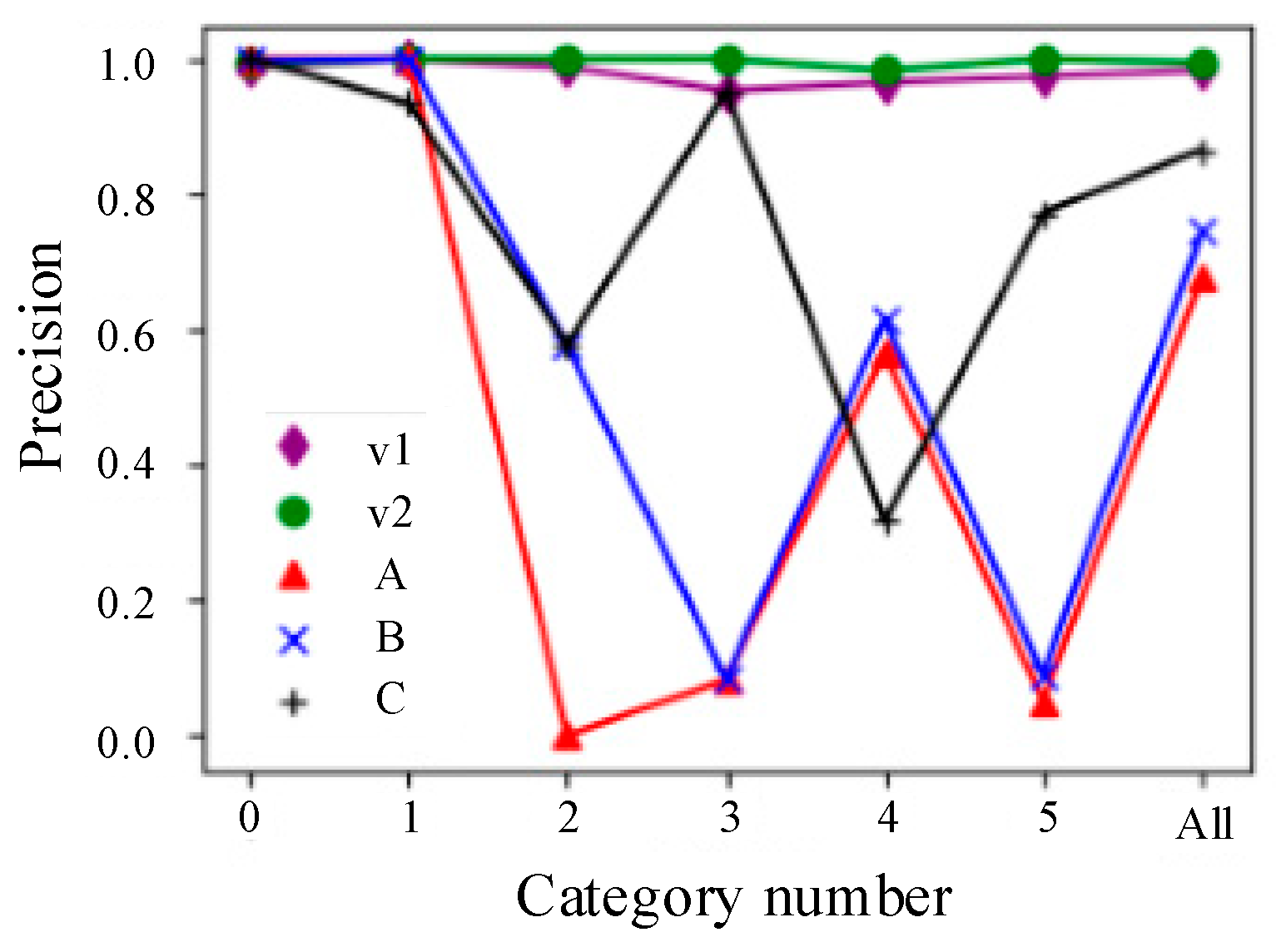
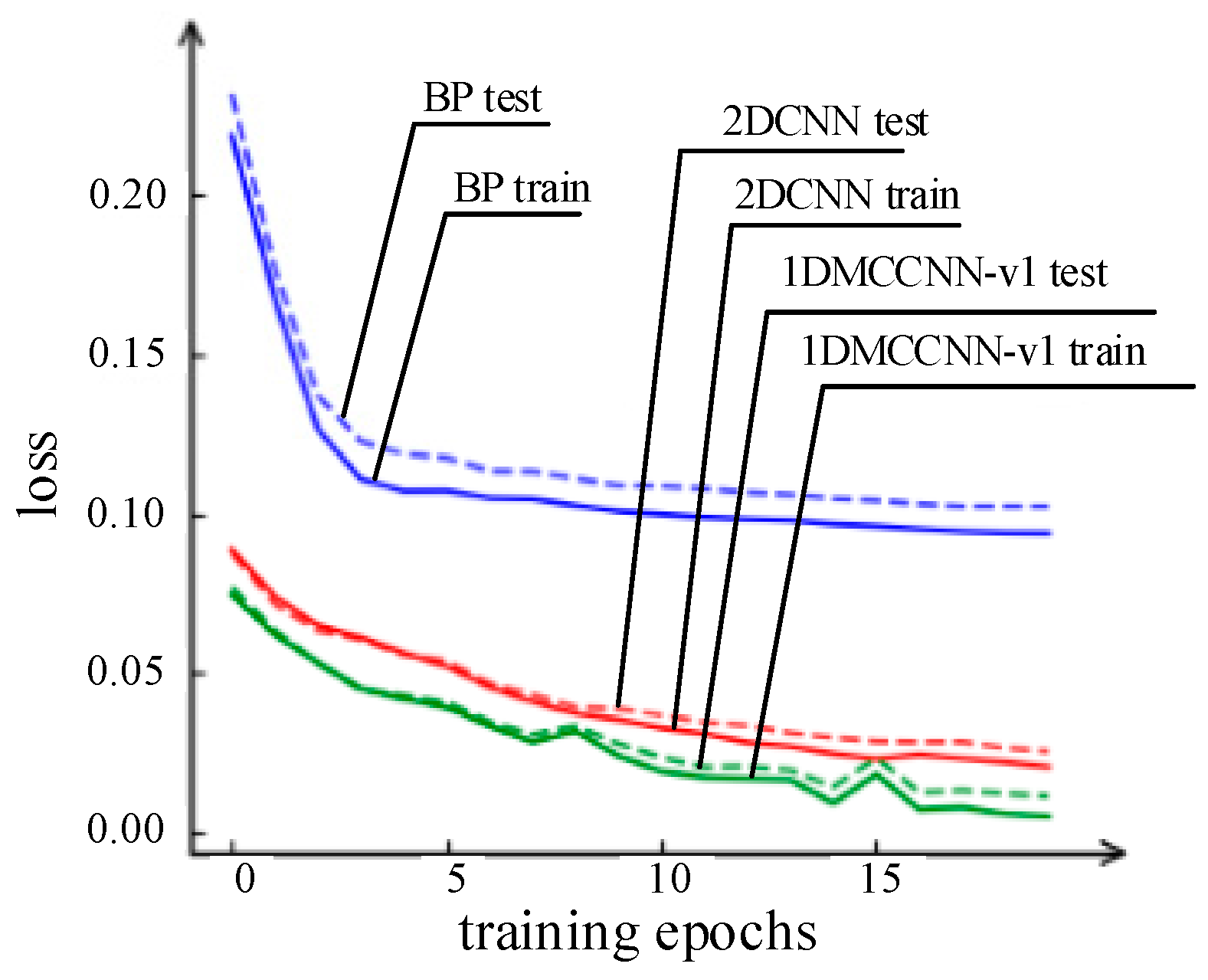
4.3. Comparison of Proposed Method and Conventional Machine Learning Algorithms
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Reveley, M.S.; Briggs, J.L.; Evans, J.K.; Sandifer, C.E.; Jones, S.M. Causal Factors and Adverse Conditions of Aviation Accidents and Incidents Related to Integrated Resilient Aircraft Control; NASA/TM-216967; NASA: Washington, DC, USA, 2011.
- Samara, P.A.; Fouskitakis, G.N.; Sakellariou, J.S.; Fassois, S.D. A statistical method for the detection of sensor abrupt faults in aircraft control systems. IEEE Trans. Control Syst. Technol. 2008, 16, 789–798. [Google Scholar] [CrossRef]
- Antonio, C.B.; Andrea De, M.; Giovanni, J.; Sorli, M. A case study on the detection and prognosis of internal leakages in electro-hydraulic flight control actuators. Actuators 2021, 10, 215–233. [Google Scholar]
- Mehmood, Z.; Hameed, A.; Safdar, S.; Siddiqui, F. Multiaxial stress mapping and fatigue failure prediction of aircraft hydraulic pipes. Eng. Fail. Anal. 2021, 121, 195–255. [Google Scholar] [CrossRef]
- Zheng, Z.; Li, X.; Zhu, Y. Feature extraction of the hydraulic pump fault based on improved autogram. Measurement 2020, 163, 907–918. [Google Scholar] [CrossRef]
- Li, L.; Huang, Y.; Tao, J.; Liu, C.; Li, K. Featured temporal segmentation method and adaboost-bp detector for internal leakage evaluation of a hydraulic cylinder. Measurement 2018, 130, 279–289. [Google Scholar] [CrossRef]
- Ma, Z.; Wang, S.; Shi, J.; Li, T.; Wang, X. Fault diagnosis of an intelligent hydraulic pump based on a nonlinear unknown input observer. Chin. J. Aeronaut. 2018, 31, 385–394. [Google Scholar] [CrossRef]
- Lu, C.; Wang, S.; Makis, V. Fault severity recognition of aviation piston pump based on feature extraction of EEMD paving and optimized support vector regression model. Aerosp. Sci. Technol. 2017, 67, 105–117. [Google Scholar] [CrossRef]
- Zhou, X.; Yang, Z.; Tian, H.; Chen, C.; Wang, L.; Zhu, Y.; Liu, J. Reliability optimization design of hydraulic system considering oil contamination. J. Mech. Sci. Technol. 2020, 34, 5041–5051. [Google Scholar] [CrossRef]
- Sharifi, S.; Tivay, A.; Rezaei, S.M.; Zareinejad, M.; Mollaei-Dariani, B. Leakage fault detection in electro-hydraulic servo systems using a nonlinear representation learning approach. ISA Trans. 2018, 73, 154–164. [Google Scholar] [CrossRef]
- Zheng, Y.M.; Ye, H.W.; Wang, X.F.; Hao, X.Y. Present Situation and Development Trend of Fault Diagnosis for Aircraft Hydraulic System. In Proceedings of the 2016 Academic Symposium on Aeronautical Test Technology, Carbondale, IL, USA, 14–15 October 2022; China Aviation Society: Beijing, China, 2016; p. 4. [Google Scholar]
- Dou, D.D.; Jiang, H.K.; He, Y.N. Fault diagnosis of aircraft hydraulic system based on information entropy and SVM multiple classification. J. Northwest Polytech. Univ. 2012, 30, 529–534. (In Chinese) [Google Scholar]
- Liu, Z.H.; Li, Z.S. Research on fault diagnosis method of aircraft hydraulic system based on wavelet packet characteristic entropy. Comput. Meas. Syst. 2009, 17, 1705–1707 + 1710. (In Chinese) [Google Scholar]
- Li, Y.H.; Wang, X.Z. Fault diagnosis of aircraft hydraulic system. Comput. Eng. Appl. 2019, 55, 232–236, 264. (In Chinese) [Google Scholar]
- Dao, H.V.; Tran, D.T.; Ahn, K.K. Active fault tolerant control system design for hydraulic manipulator with internal leakage faults based on disturbance observer and online adaptive identification. IEEE Access. 2021, 9, 23850–23862. [Google Scholar] [CrossRef]
- Jin, Y.; Shan, C.; Wu, Y.; Xia, Y.; Zhang, Y.; Zeng, L. Fault diagnosis of hydraulic seal wear and internal leakage using wavelets and wavelet neural network. IEEE Trans. Instrum. Meas. 2019, 68, 1026–1034. [Google Scholar] [CrossRef]
- Maddahi, A.; Kinsner, W.; Sepehri, N. Internal leakage detection in electrohydrostatic actuators using multiscale analysis of experimental data. IEEE Trans. Instrum. Meas. 2016, 65, 2734–2747. [Google Scholar] [CrossRef]
- Xu, Q.N.; Lee, K.; Zhou, H.; Yang, H. Model-based fault detection and isolation scheme for a rudder servo system. IEEE Trans. Ind. Electron. 2015, 62, 2384–2396. [Google Scholar] [CrossRef]
- Muenchhof, M.; Beck, M.; Isermann, R. Fault-tolerant actuators and drives—Structures, fault detection principles and applications. Annu. Rev. Control. 2009, 33, 136–148. [Google Scholar] [CrossRef]
- Yu, C.; Wang, X.; Wang, B.; Meng, X. A mechanical damage detection method of aircraft hydraulic pipeline based on acoustic emission technology. J. Air Force Eng. Univ. (Nat. Sci. Ed.) 2022, 23, 7–11. [Google Scholar]
- Xu, L.; Li, X.; Yang, S. Analysis and improvement measures of hydraulic system oil leakage. Hydraul. Pneum. Seals 2022, 42, 92–96. [Google Scholar]
- Su, X. Failure analysis of a certain airplane hydraulic system pressure changing with engine speed. Hydraul. Pneum. Seals 2021, 41, 88–91. [Google Scholar]
- Li, Y.; Shi, Z.; Lin, T.R.; Yu, G. An iterative reassignment based energy-concentrated TFA post-processing tool and application to bearing fault diagnosis. Measurement 2022, 193, 110953. [Google Scholar]
- Lecun, Y.; Bottou, L.; Bengio, Y.; Haffner, P. Gradient-based learning applied to document recognition. Proc. IEEE. 1998, 86, 2278–2324. [Google Scholar] [CrossRef] [Green Version]
- LeCun, Y.; Boser, B.; Denker, J.S.; Henderson, D.; Howard, R.E.; Hubbard, W.; Jackel, L.D. Backpropagation Applied to Handwritten ZIP Code Recognition. Neural Compitation. 1989, 11, 541–551. [Google Scholar] [CrossRef]
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. ImageNet Classification With Deep Convolutional Neural Networks//Proceedings of Advances in Neural Information Processing Systems; MIT Press: Cambridge, MA, USA, 2012; pp. 1106–1114. [Google Scholar]
- Matthew, D.; Zeiler, R.F. Visualizing and Understanding Convolutional Networks; ECCV: Zurich, Switzerland, 2014; Volume 6, pp. 818–833. [Google Scholar]
- Simonyan, K.; Zisserman, A. Very deep convolutional networks for large-scale image recognition. International Conference on Learning Representations(ICLR) 2015, San Diego, CA, USA, May, 2015. arXiv 2014, arXiv:1409.1556. [Google Scholar]
- Christian, S.; Wei, L.; Yangqing, J. Going deeper with convolutions. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Boston, MA, USA, 7–12 June 2015; Volume 10. [Google Scholar]
- Kaiming, H.; Xiangyu, Z.; Shaoqing, R.; Sun, J. Deep Residual Learning for Image Recognition; CVPR: Las Vegas, NV, USA, 2016; p. 7. [Google Scholar]
- Zhang, F.; Wu, M.; Hou, X.; Wang, X.; Han, C.; Xu, X.; Zhang, L. Modeling and fault simulation of the landing gear extension and retraction system. Comput. Eng. Sci. 2016, 38, 1286–1293. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number | AMESIM Element | Key Parameter | Value | Meaning |
|---|---|---|---|---|
| 1 | signal03 | Output | 5000 | Set the shaft speed to 5000 r/min, that is, the zero-flow pressure of the pump is 3000 psi. |
| 3 | accumulator_2 | Gas precharge pressure (psi) Accumulator volume (L) | 1885 2.62 | Accumulator reduces pressure pulses, as an emergency pressure source. |
| 4 | presscontol01 | Relief valve cracking pressure (psi) | 3436 | Pressure relief valve for system discharge. |
| 5 | tank01 | Tank pressure (psi) | 50 | Booster tank, preboost to 50 psi. |
| 7 | pump13 | Nominal shaft speed (r·min−1) | 5000 | Left engine drive pump (EDP). |
| 11–14 | pump13 | Nominal shaft speed (r·min−1) | 5000 4166 | Right EDP, yellow system EMP, blue system EMP, RAT. Rated pressure of RAT is 2500 psi. |
| 10 | constant_3 | Constant value | 34.4738 | PTU opens when the pressure difference between green and yellow systems is 34.4738 bar. |
| Number | Fault Category and Category Number | Key Parameter | Normal Value | Fault Value |
|---|---|---|---|---|
| 6 | Pump leakage—1 | Equivalent orifice diameter (mm) | 0.1–0.3 | 1–2 |
| 2 | Filter blockage—2 | Equivalent orifice diameter (mm) | 5–7 | 3–4 |
| 9 | Actuating Cylinder inner leakage—3 | Leakage coefficient (L·min−1·bar−1) | 0–0.01 | 0.03–0.05 |
| 10 | Servo valve blockage—4 | Equivalent orifice diameter (mm) | 5–7 | 3–4 |
| 8 | Oil pollution—5 | Air content (%) | 0.1–0.3 | 5–15 |
| Prediction | 0 | 1 | 2 | 3 | 4 | 5 | Recall /% | |
|---|---|---|---|---|---|---|---|---|
| Real | ||||||||
| 0 | 351 | 0 | 0 | 1 | 1 | 1 | 99.2 | |
| 1 | 0 | 61 | 0 | 0 | 0 | 0 | 100 | |
| 2 | 1 | 0 | 75 | 1 | 1 | 0 | 96.2 | |
| 3 | 1 | 0 | 0 | 59 | 0 | 1 | 96.7 | |
| 4 | 1 | 0 | 1 | 1 | 54 | 0 | 94.7 | |
| 5 | 2 | 0 | 0 | 0 | 0 | 77 | 97.5 | |
| Precision /% | 98.7 | 100 | 98.7 | 95.2 | 96.4 | 97.5 | 98.2 | |
| Prediction | 0 | 1 | 2 | 3 | 4 | 5 | Recall /% | |
|---|---|---|---|---|---|---|---|---|
| Real | ||||||||
| 0 | 383 | 0 | 0 | 0 | 1 | 0 | 99.7 | |
| 1 | 0 | 61 | 0 | 0 | 0 | 0 | 100 | |
| 2 | 0 | 0 | 78 | 0 | 0 | 0 | 100 | |
| 3 | 0 | 0 | 0 | 61 | 0 | 0 | 100 | |
| 4 | 2 | 0 | 0 | 0 | 55 | 0 | 96.5 | |
| 5 | 1 | 0 | 0 | 0 | 0 | 78 | 98.7 | |
| Precision /% | 99.2 | 100 | 100 | 100 | 98.2 | 100 | 99.4 | |
| Parameter Name | Value |
|---|---|
| Convolution kernel size | (1 × 100, 1 × 20) |
| Convolution step length | (5, 2) |
| Pooling filter size | (1 × 2, 1 × 2) |
| Pooling step length | (2, 2) |
| Initial learning rate (lr) | 0.001 |
| lr decaying | lr = lr × 0.9/epoch |
| batch size | 128 |
| FC layer dropout rate | 0.4 |
| Training epochs | 20 |
| Optimizer | AdamOptimizer |
| Algorithm | Training Precision | Test Precision | Training Time /s | Model Size /MB |
|---|---|---|---|---|
| 1DMCCNN-v1 | 0.990 | 0.982 | 16 | 4.52 |
| 1DMCCNN-v2 | 0.998 | 0.994 | 16 | 4.66 |
| 2DCNN | 0.986 | 0.957 | 24 | 15.5 |
| BP | 0.649 | 0.647 | 7 | 6.83 |
| SVM | 0.902 | 0.732 | 46 | 0.084 |
| KNN | 1 | 0.903 | needless | 82.6 |
| LSTM | 0.952 | 0.943 | 36 | 8.46 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shen, K.; Zhao, D. Fault Diagnosis for Aircraft Hydraulic Systems via One-Dimensional Multichannel Convolution Neural Network. Actuators 2022, 11, 182. https://doi.org/10.3390/act11070182
Shen K, Zhao D. Fault Diagnosis for Aircraft Hydraulic Systems via One-Dimensional Multichannel Convolution Neural Network. Actuators. 2022; 11(7):182. https://doi.org/10.3390/act11070182
Chicago/Turabian StyleShen, Kenan, and Dongbiao Zhao. 2022. "Fault Diagnosis for Aircraft Hydraulic Systems via One-Dimensional Multichannel Convolution Neural Network" Actuators 11, no. 7: 182. https://doi.org/10.3390/act11070182
APA StyleShen, K., & Zhao, D. (2022). Fault Diagnosis for Aircraft Hydraulic Systems via One-Dimensional Multichannel Convolution Neural Network. Actuators, 11(7), 182. https://doi.org/10.3390/act11070182