
Synthesis, Characterization and Fabrication of Copper Nanoparticles Embedded Non-Perfluorintaed Kraton Based Ionic Polymer Metal Composite (IPMC) Actuator

 ,
,  , ,
, ,
Abstract
:1. Introduction
2. Materials and Methods
2.1. Materials
2.2. Methods
2.2.1. Instrumentation
2.2.2. Synthesis of Copper Nanoparticles (CuNPs)
2.2.3. Characterization of CuNPs
2.2.4. Membrane Fabrication of KR-CuNPs
2.2.5. Chemical Plating
2.2.6. Characterization of the Membrane Actuator
2.2.7. Ion-Exchange Capacity (IEC)
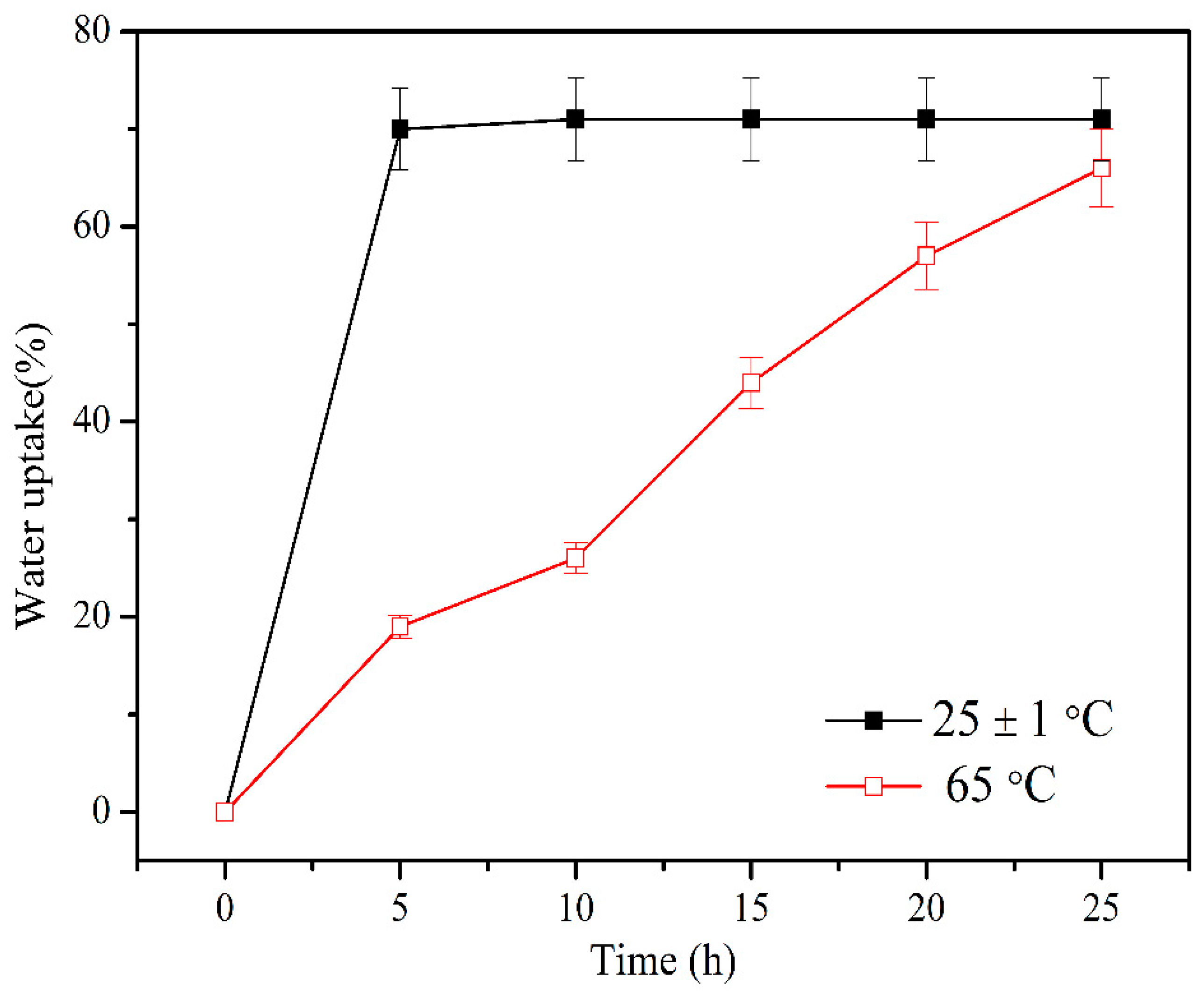
2.2.8. Water Uptake (WU)
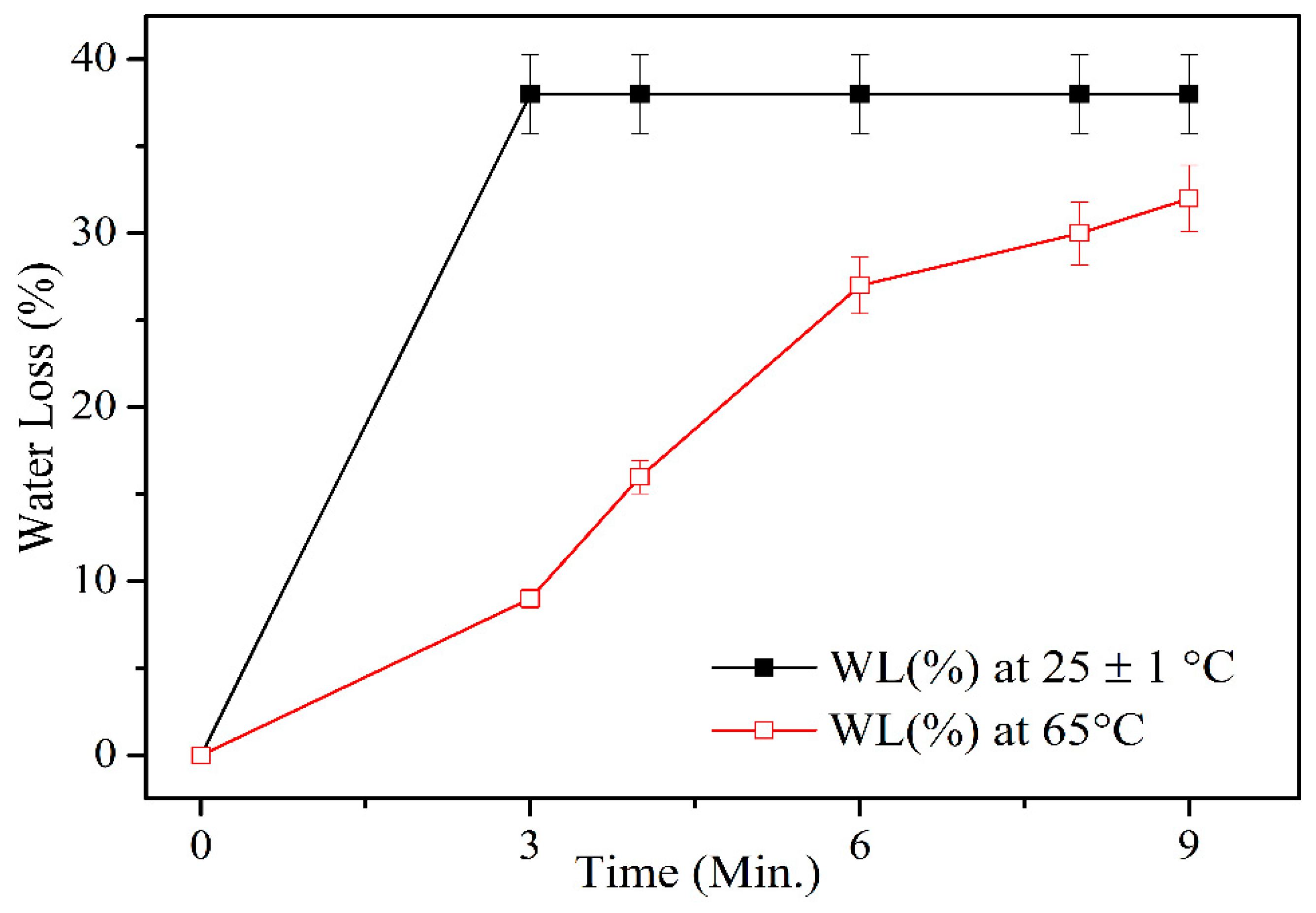
2.2.9. Water Loss (WL)
2.2.10. Proton Conductivity (PC)
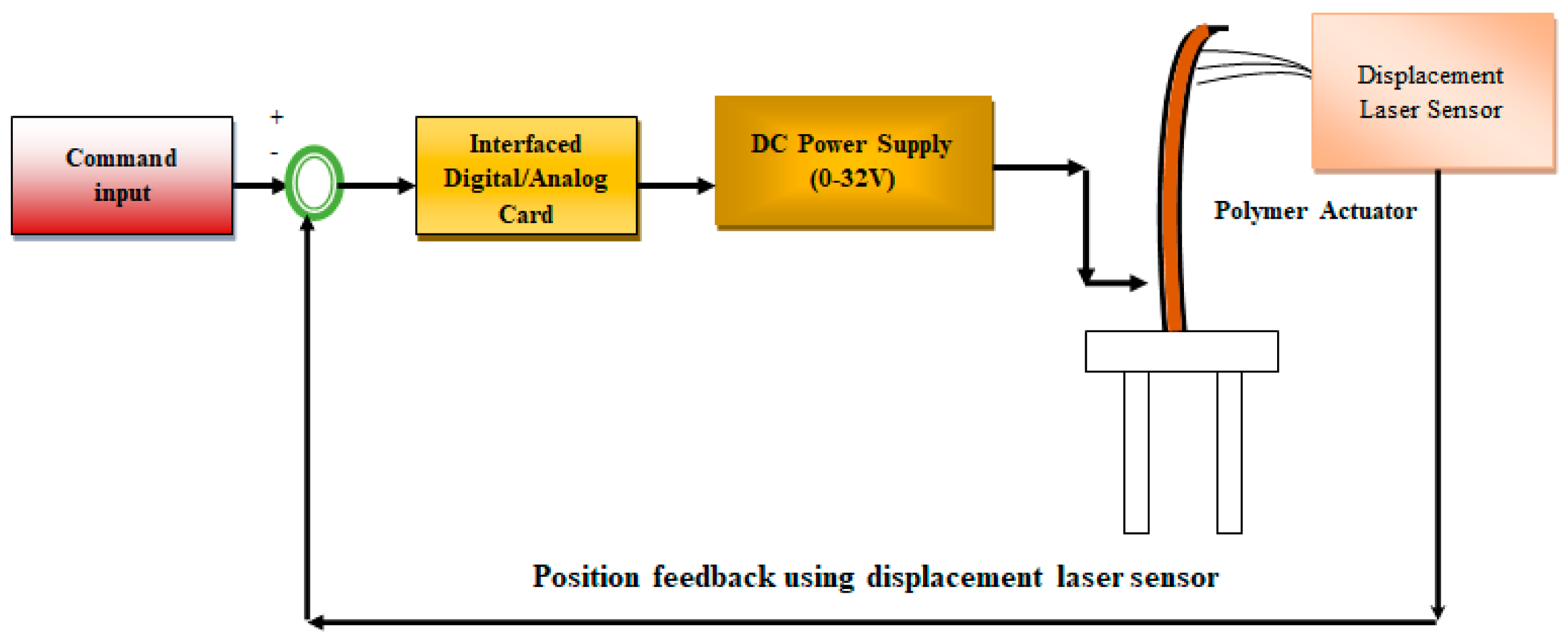
2.2.11. Electromechanical Characterization
3. Result and Discussion
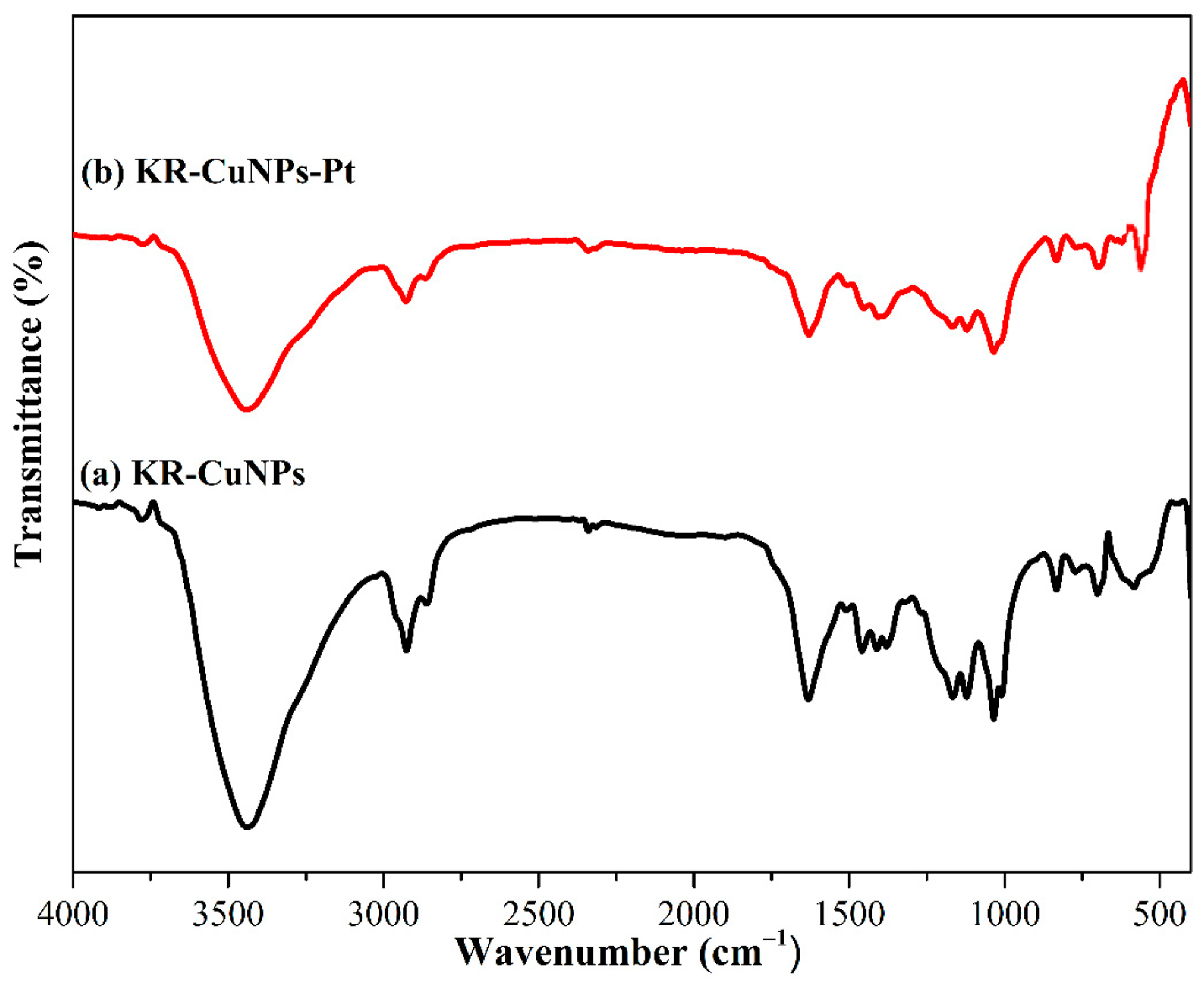
3.1. FTIR Spectra
3.2. IEC, PC, WU and WL
3.3. SEM Study
3.4. EDX Study
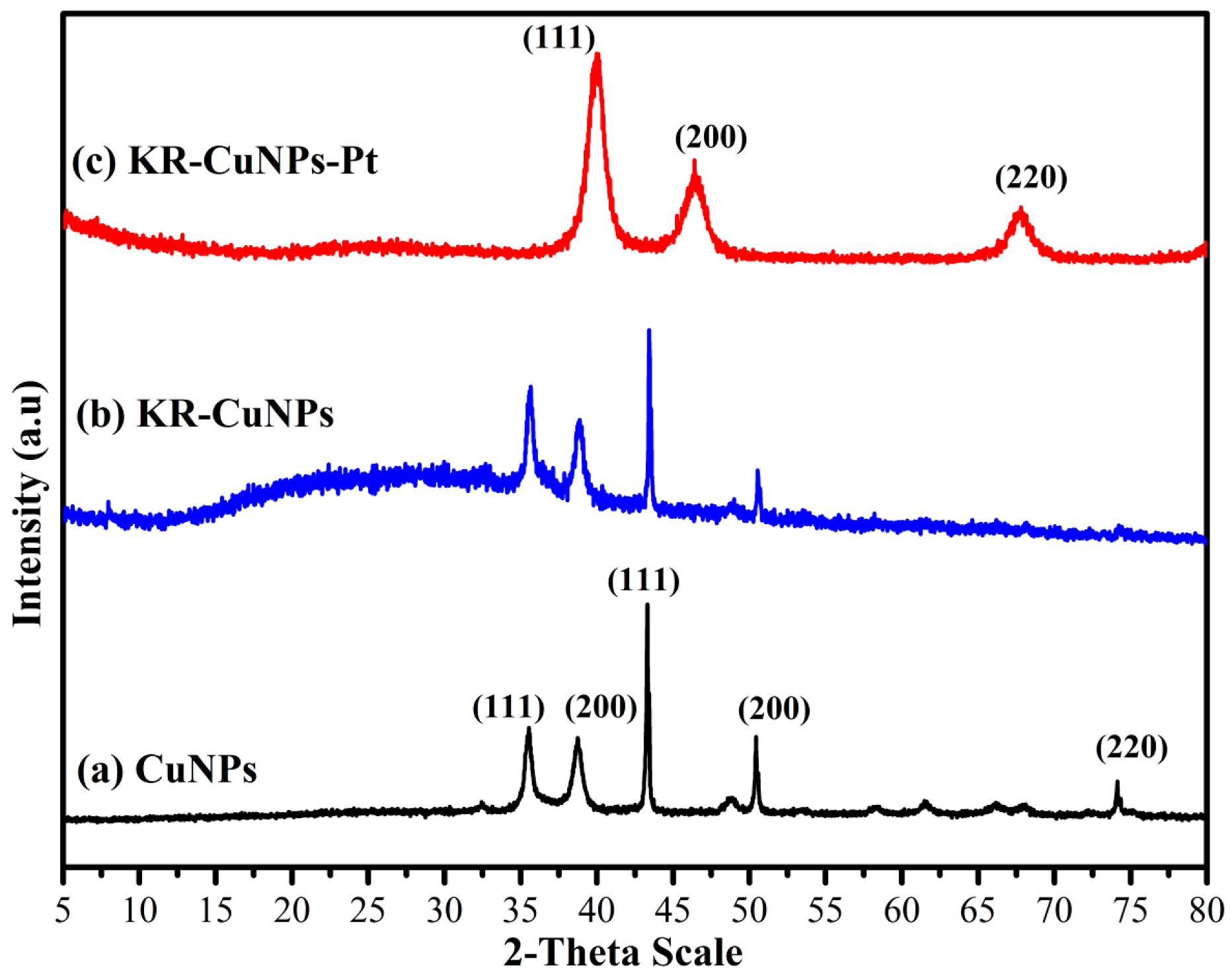
3.5. X-ray Diffrzaction (XRD) Patterns Study
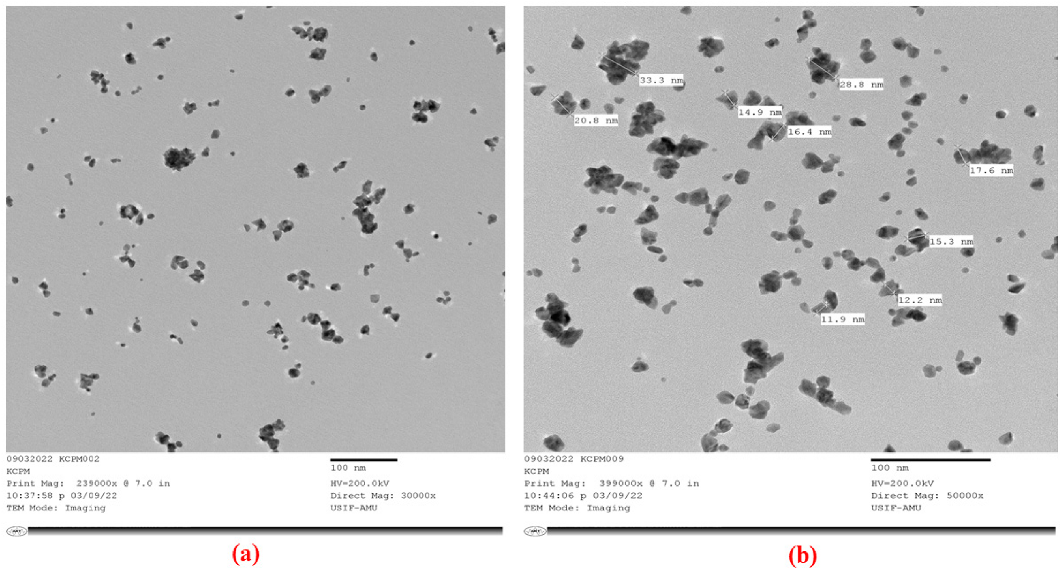
3.6. TEM Study
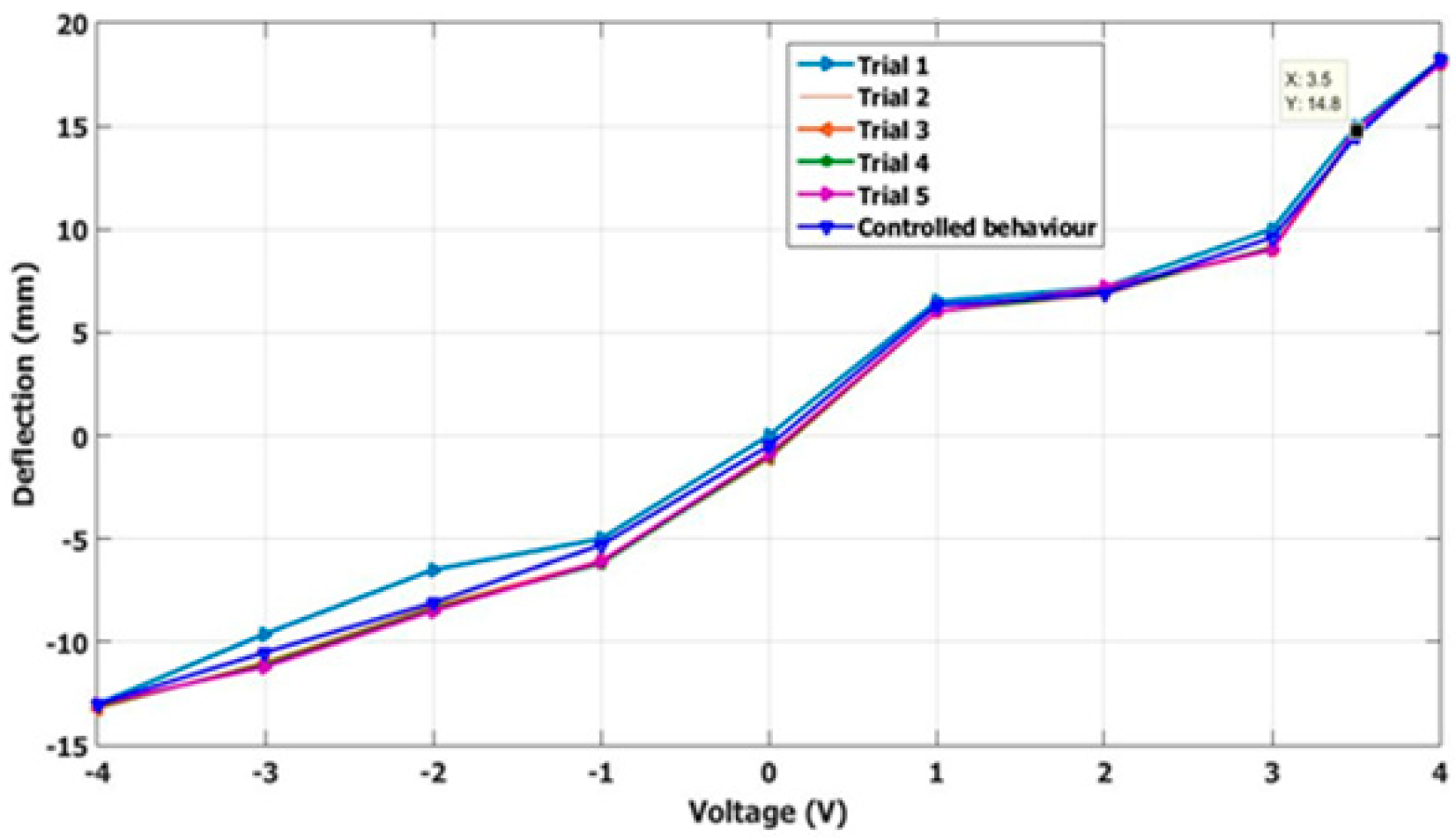
3.7. Electromechanical Characterization
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Ionov, L. Polymeric Actuators. Langmuir 2005, 31, 5015–5024. [Google Scholar] [CrossRef] [PubMed]
- Luqman, M.; Anis, A.; Shaikh, H.M.; Al-Zahrani, S.M.; Alam, M.A. Development of a Soft Robotic Bending Actuator Based on a Novel Sulfonated Polyvinyl Chloride–Phosphotungstic Acid Ionic Polymer–Metal Composite (IPMC) Membrane. Membranes 2022, 12, 651. [Google Scholar] [CrossRef]
- Luqman, M.; Shaikh, H.M.; Anis, A.; Al-Zahrani, S.M.; Alam, M.A. A convenient and simple ionic polymer-metal composite (IPMC) actuator based on a platinum-coated sulfonated poly(ether ketone)–polyaniline composite membrane. Polymers 2022, 14, 668. [Google Scholar] [CrossRef]
- Turner, A.J.; Ramsay, K. Review and development of electromechanical actuators for improved transmission control and efficiency. SAE Tech. Pap. 2004, 113, 908–919. [Google Scholar] [CrossRef]
- Luqman, M.; Shaikh, H.; Anis, A.; Al-Zahrani, S.M.; Hamidi, A.; Inamuddin. Platinum-coated silicotungstic acid-sulfonated polyvinyl alcohol-polyaniline based hybrid ionic polymer metal composite membrane for bending actuation applications. Sci. Rep. 2022, 12, 4467. [Google Scholar] [CrossRef]
- Ahamed, M.I.; Asiri, A.M.; Luqman, M. Preparation, physicochemical characterization, and microrobotics applications of polyvinyl chloride-(PVC-) based PANI/PEDOT: PSS/ZrP composite cation-exchange membrane. Adv. Mater. Sci. Eng. 2019, 2019, 4764198. [Google Scholar] [CrossRef] [Green Version]
- Saint Martin, L.B.; Mendes, R.U.; Cavalca, K.L. Electromagnetic actuators for controlling flexible cantilever beams. Struct. Control. Health Monit. 2018, 25, e2043. [Google Scholar] [CrossRef]
- Xu, J.M.; Ma, L.; Han, H.L.; Ni, H.Z.; Wang, Z.; Zhang, H.X. Synthesis and properties of a novel sulfonated poly(arylene ether ketone sulfone) membrane with a high β-value for direct methanol fuel cell applications. Electrochim. Acta 2014, 146, 688–696. [Google Scholar] [CrossRef]
- Kim, K.J.; Shahinpoor, M. Ionic polymer–metal composites: II. Manufacturing techniques. Smart Mater Struct. 2003, 12, 65–79. [Google Scholar] [CrossRef]
- Ru, C.Y.; Gu, Y.Y.; Duan, Y.T.; Zhao, C.J.; Na, H. Enhancement in proton conductivity and methanol resistance of Nafion membrane induced by blending sulfonated poly (arylene ether ketones) for direct methanol fuel cells. J. Membr. Sci. 2019, 573, 439–447. [Google Scholar] [CrossRef]
- Inamuddin; Khan, A. An overview of preparation, properties and applications of ionic polymer composite actuators. In New Polymeric Composite Materials: Environmental, Biomedical, Actuator and Fuel Cell Applications; Inamuddin, Mohammad, A.I., Asiri, M.A., Eds.; Materials Science Forum Scientific: Millersville, PA, USA, 2016; Volume 11, pp. 326–386. [Google Scholar]
- Khan, A.; Jain, R.K.; Asiri, A.M. Thorium (IV) phosphate-polyaniline composite-based hydrophilic membranes for bending actuator application. Polym. Eng. Sci. 2017, 57, 258–267. [Google Scholar] [CrossRef]
- Khan, A.; Jain, R.K.; Luqman, M.; Asiri, A.M. Development of sulfonated poly(vinyl alcohol)/aluminium oxide/graphene based ionic polymer-metal composite (IPMC) actuator. Sens. Actuators A Phys. 2018, 280, 114–124. [Google Scholar] [CrossRef]
- Khan, A.; Jain, R.K.; Banerjee, P.; Ghosh, B.; Asiri, A.M. Development, characterization and electromechanical actuation behavior of ionic polymer metal composite actuator based on sulfonated poly (1,4-phenylene ether-ether-sulfone)/carbon nanotubes. Sci. Rep. 2018, 8, 9909. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Inamuddin; Khan, A.; Jain, R.K.; Naushad, M. Development of sulfonated poly(vinyl alcohol)/polpyrrole based ionic polymer metal composite (IPMC) actuator and its characterization. Smart Mater. Struct. 2015, 24, 095003. [Google Scholar] [CrossRef]
- Khan, A.A.; Inamuddin; Alam, M.M. Determination and separation of Pb2+ from aqueous solutions using a fibrous type organic-inorganic hybrid cation exchange material: Polypyrrole thorium(IV) phosphate. React. Funct. Polym. 2005, 63, 119–133. [Google Scholar] [CrossRef]
- Khan, A.; Inamuddin; Jain, R.K.; Naushad, M. Fabrication of a silver nano powder embedded kraton polymer actuator and its characterization. RSC Adv. 2015, 5, 91564. [Google Scholar] [CrossRef]
- Patil, S.A.; Ryu, C.H.; Kim, H.S. Synthesis and characterization of copper nanoparticles (Cu-Nps) using rongalite as reducing agent and photonic sintering of Cu-Nps ink for printed electronics. Int. J. Precis. Eng. Manuf.-Green Technol. 2018, 5, 239–245. [Google Scholar] [CrossRef]
- Jain, R.K.; Khan, A.; Inamuddin; Asiri, A.M. Design and development of non-perfluorinated ionic polymer metal composite-based flexible link manipulator for robotics assembly. Polym. Compos. 2019, 40, 2582–2593. [Google Scholar] [CrossRef]
- Luqman, M.; Lee, J.W.; Moon, K.K.; Yoo, Y.T. Sulfonated polystyrene-based ionic polymer–metal composite (IPMC) actuator. J. Ind. Eng. Chem. 2011, 17, 49–55. [Google Scholar] [CrossRef]
- Khan, A.; Jain, R.K.; Banerjee, P.; Inamuddin; Asiri, A.M. Soft actuator based on Kraton with GO/Ag/Pani composite electrodes for robotic applications. Mater. Res. Express. 2017, 4, 115701. [Google Scholar] [CrossRef]
- Inamuddin; Jain, R.K.; Hussain, S.; Naushad, M. Poly(3,4-ethylenedioxythiophene): Polystyrene sulfonate zirconium(IV) phosphate (PEDOT:PSS-ZrP) composite ionomeric membrane for artificial muscle applications. RSC Adv. 2015, 5, 84526–84534. [Google Scholar] [CrossRef]
- Khan, A.; Inamuddin; Jain, R.K. Easy, operable ionic polymer metal composite actuator based on a platinum-coated sulfonated poly(vinyl alcohol)–polyaniline composite membrane. J. Appl. Polym. Sci. 2016, 133, 43787. [Google Scholar] [CrossRef]
- Inamuddin; Khan, A.; Luqman, M.; Dutta, A. Kraton based ionic polymer metal composite (IPMC) actuator. Sens. Actuators A Phys. 2014, 216, 295–300. [Google Scholar] [CrossRef]
- Jain, R.K.; Majumder, S.; Dutta, A. SCARA based peg-in-hole assembly using compliant IPMC micro gripper. Rob. Auton. Syst. 2013, 61, 297–311. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Deflection (In mm) | |||||
|---|---|---|---|---|---|
| Voltage | 0.0 V | 1.0 V | 2.0 V | 3.0 V | 4.0 V |
| Trial 1 | 0 | 5.5 | 7.0 | 9.1 | 18.0 |
| Trial 2 | 0 | 6.0 | 7.1 | 9.0 | 18.1 |
| Trial 3 | 0 | 5.8 | 7.2 | 9.2 | 18.0 |
| Trial 4 | 0 | 6.1 | 7.0 | 9.0 | 18.2 |
| Trial 5 | 0 | 6.2 | 7.5 | 9.4 | 18.1 |
| Materials | IEC (meq·g−1) | σ (mS·cm−1) | WU (%) | ||
|---|---|---|---|---|---|
| at RT | at 45 °C | at 65 °C | |||
| KR-CuNPs | 2.10 | 1.93 | 48.5 (1 h) | 59.62 (1 h) | 71.05 (1 h) |
| Voltage (V) | F1 (mN) | F2 (mN) | F3 (mN) | F4 (mN) | F5 (mN) | Average Force Value (F) in mN |
|---|---|---|---|---|---|---|
| 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| 1 | 0.042 | 0.04 | 0.041 | 0.042 | 0.042 | 0.0414 |
| 2 | 0.102 | 0.103 | 0.104 | 0.103 | 0.102 | 0.1028 |
| 3 | 0.292 | 0.292 | 0.292 | 0.291 | 0.292 | 0.2918 |
| 4 | 0.345 | 0.342 | 0.341 | 0.344 | 0.345 | 0.3434 |
| Mean | 0.155 | |||||
| Standard Deviation | 0.137 | |||||
| Repeatability | 86.295% | |||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Luqman, M.; Anis, A.; Shaikh, H.M.; Al-Zahrani, S.M.; Alam, M.A. Synthesis, Characterization and Fabrication of Copper Nanoparticles Embedded Non-Perfluorintaed Kraton Based Ionic Polymer Metal Composite (IPMC) Actuator. Actuators 2022, 11, 183. https://doi.org/10.3390/act11070183
Luqman M, Anis A, Shaikh HM, Al-Zahrani SM, Alam MA. Synthesis, Characterization and Fabrication of Copper Nanoparticles Embedded Non-Perfluorintaed Kraton Based Ionic Polymer Metal Composite (IPMC) Actuator. Actuators. 2022; 11(7):183. https://doi.org/10.3390/act11070183
Chicago/Turabian StyleLuqman, Mohammad, Arfat Anis, Hamid M. Shaikh, Saeed M. Al-Zahrani, and Mohammad Asif Alam. 2022. "Synthesis, Characterization and Fabrication of Copper Nanoparticles Embedded Non-Perfluorintaed Kraton Based Ionic Polymer Metal Composite (IPMC) Actuator" Actuators 11, no. 7: 183. https://doi.org/10.3390/act11070183
APA StyleLuqman, M., Anis, A., Shaikh, H. M., Al-Zahrani, S. M., & Alam, M. A. (2022). Synthesis, Characterization and Fabrication of Copper Nanoparticles Embedded Non-Perfluorintaed Kraton Based Ionic Polymer Metal Composite (IPMC) Actuator. Actuators, 11(7), 183. https://doi.org/10.3390/act11070183