
Biorobotics: An Overview of Recent Innovations in Artificial Muscles

Abstract
:1. Introduction
2. Criteria to Compare
3. Innovation of Components
3.1. Paper-Thin Materials and Techniques for Them
3.2. Liquid Crystal Polymers and Elastomers
3.3. Artificial Skin and Fabrics
3.4. Rigid Materials and Techniques for Variability
3.5. Soft Robotic Grippers
3.6. Soft Robotic Sensors
3.7. Miscellaneous Techniques for Materials Used in Actuation
4. Nanocomponents in Artificial Muscles
4.1. Graphene
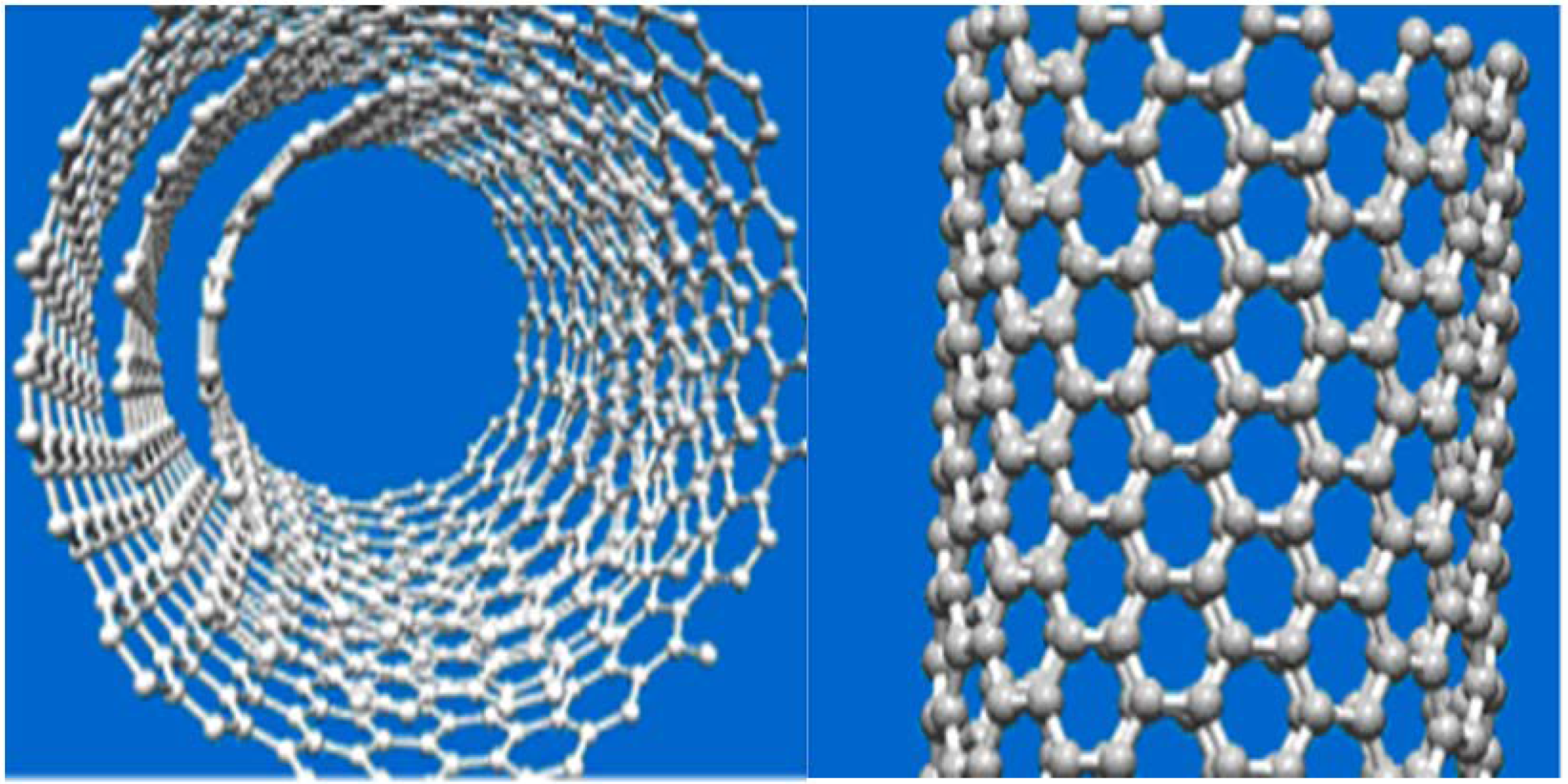
4.2. Carbon Nanotubes
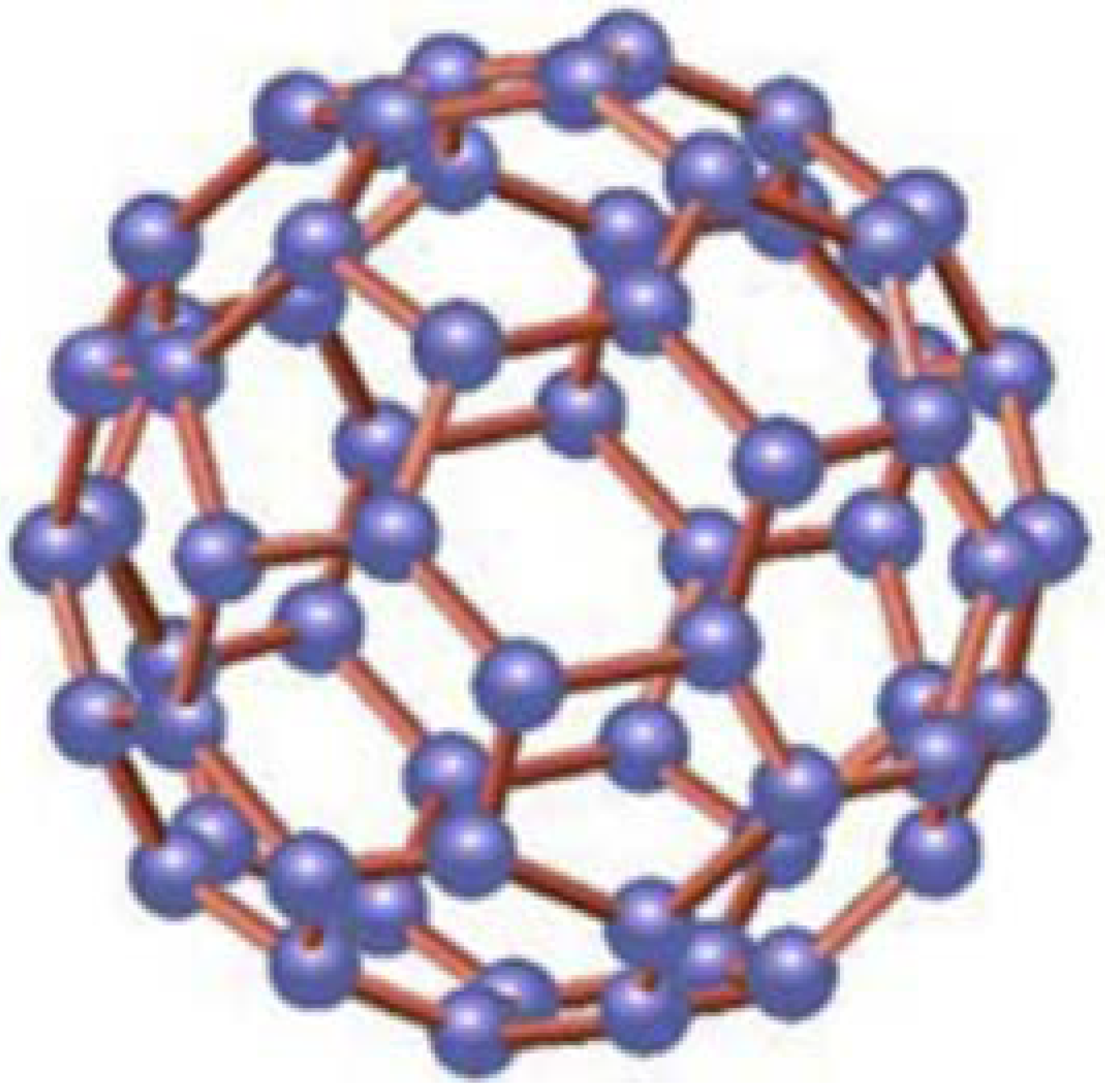
4.3. Fullerene
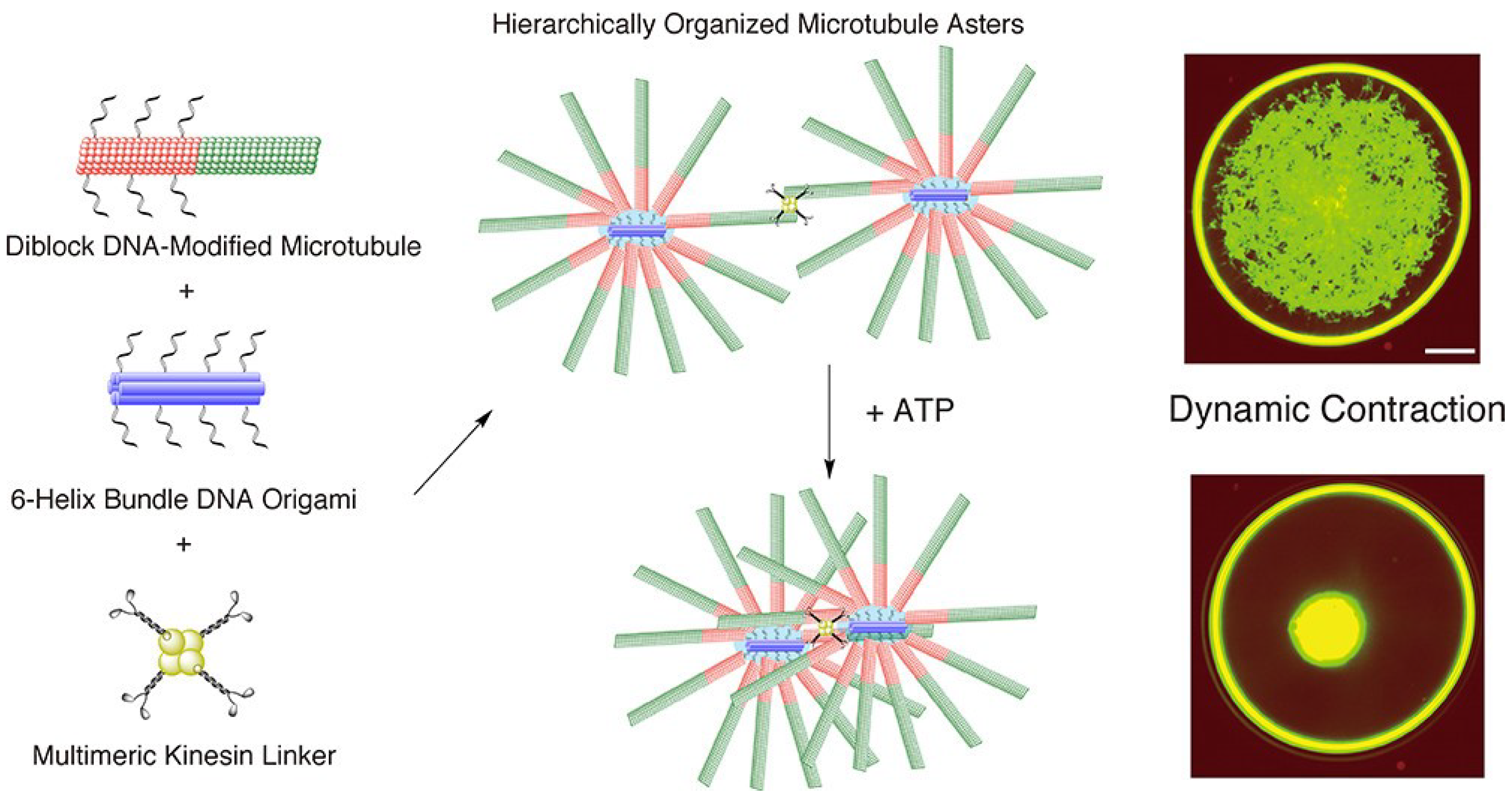
4.4. Molecular Motors
4.5. Metallic Nanoparticles
4.6. Comparison of Nanocomponents
5. Popular Forms of Actuating Artificial Muscles
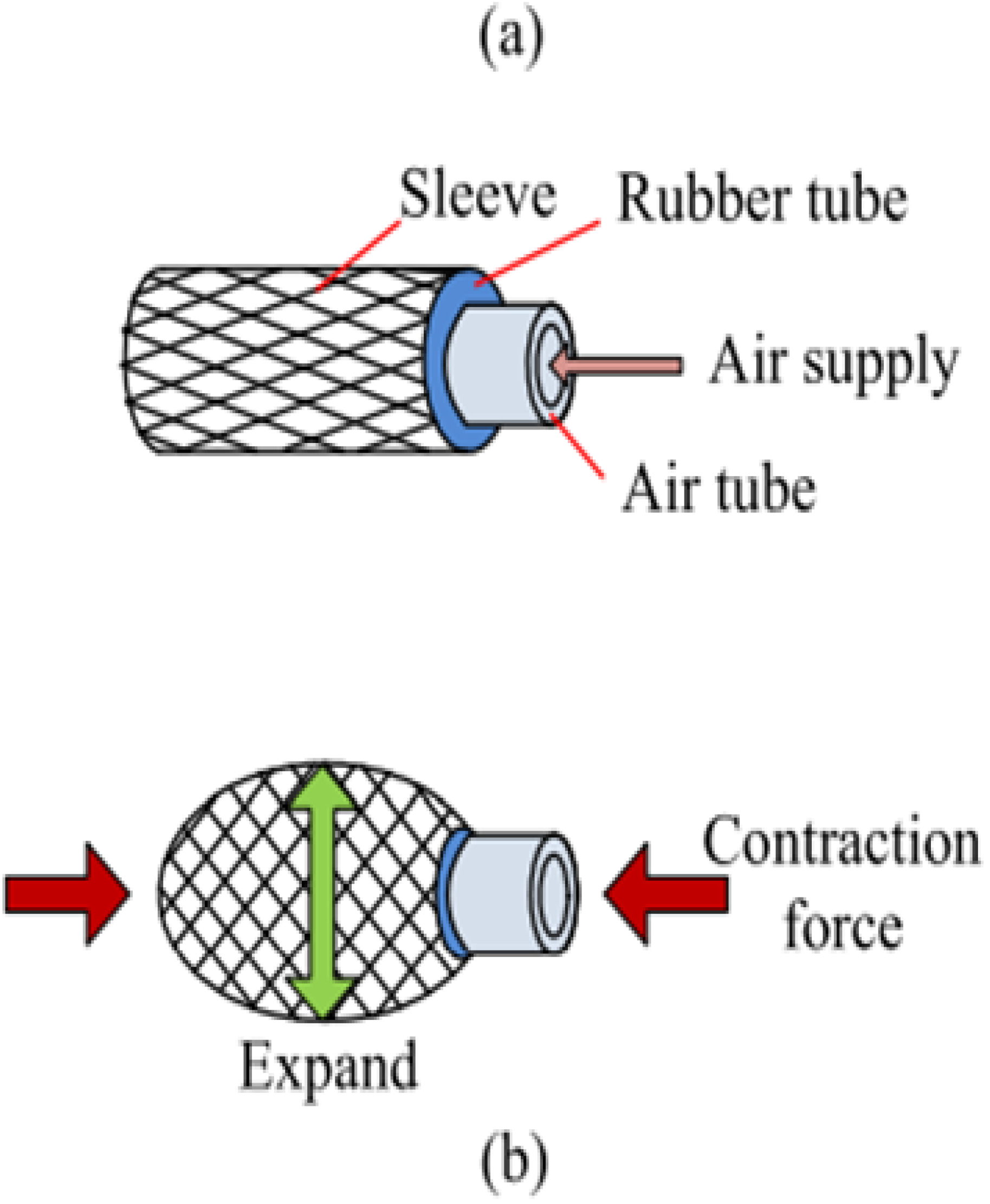
5.1. Pneumatics
5.2. Hydraulics
5.3. Twisted Fibers
5.4. Shape Memory Polymers and Alloys
5.5. Electroactive Soft Materials
5.6. Liquid Crystal Elastomers
5.7. Miscellaneous Developments
6. Fabrication Methods for Artificial Muscles
6.1. Pneumatic Fabrication
6.2. Hydraulic Fabrication
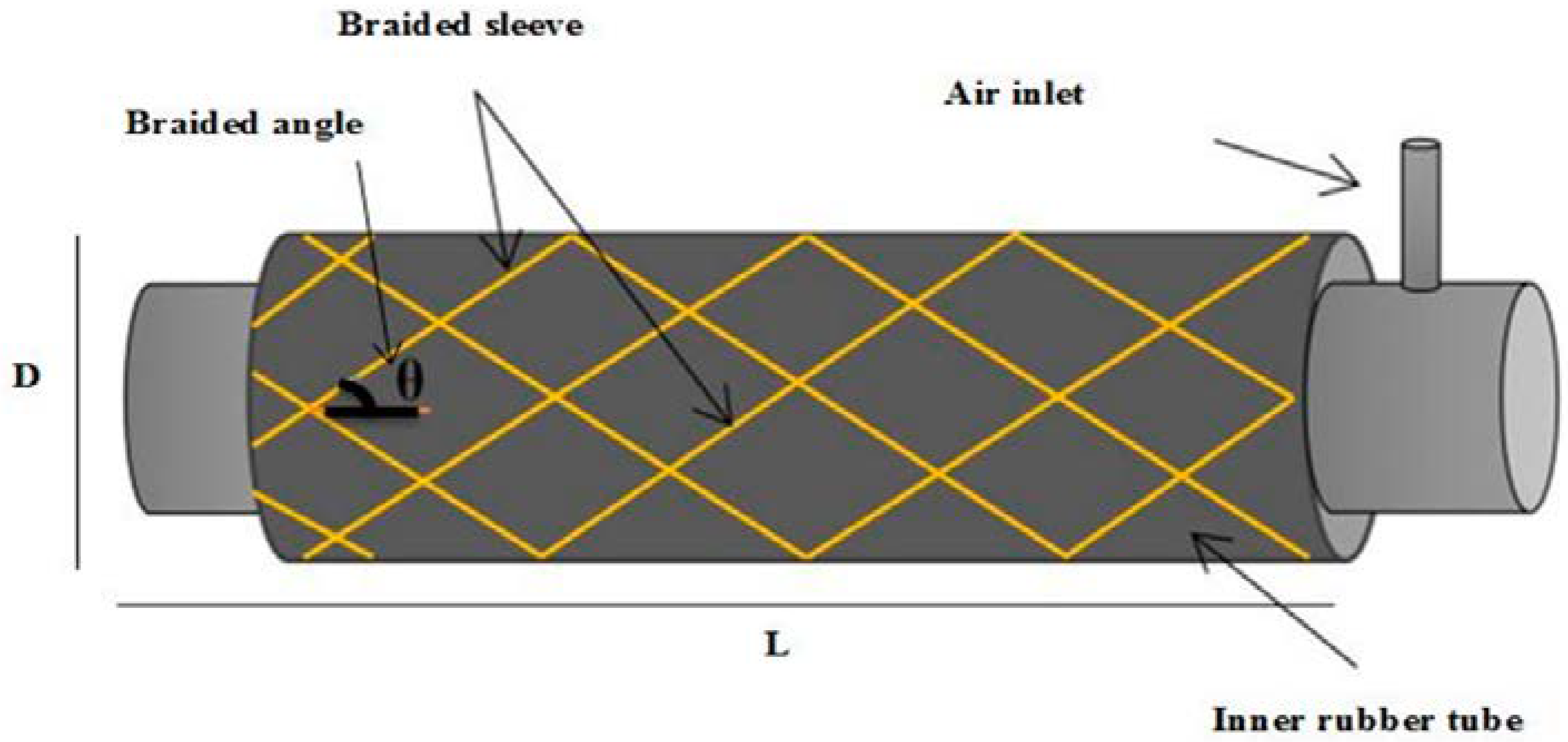
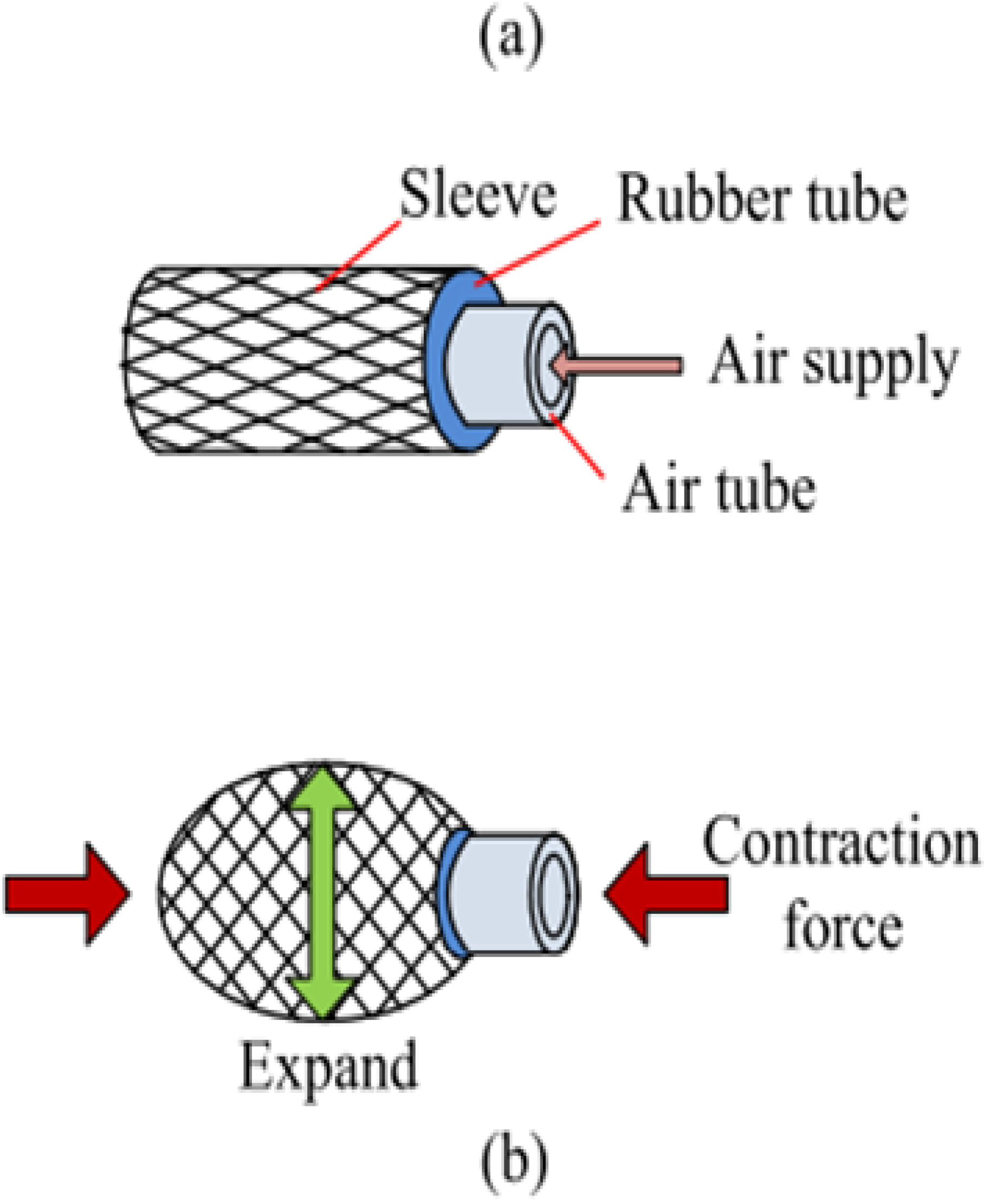
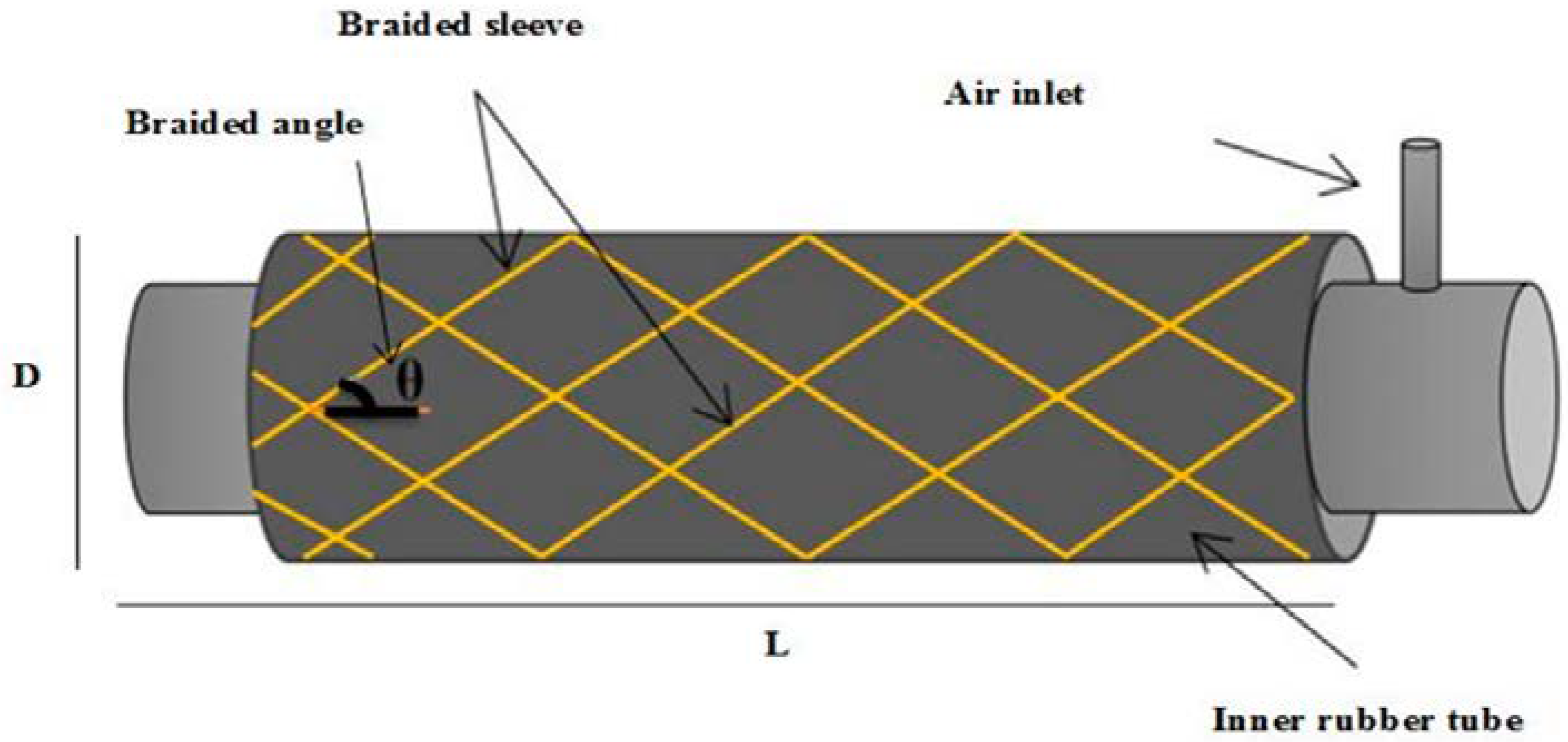
“A 2 × 2 twill pattern aramid fiber sleeves were used for the fiber materials because of their low cost, high strength, and resistance to abrasion. Three different inexpensive elastomers were used to create three different actuators, including 60A neoprene, 80A neoprene and 70A natural rubber were selected for the experiments to validate the elastic force model over a range of elastomer elastic moduli. All actuators were designed with a sufficient wall thickness to prevent bursting and to be compatible with commercially available crimp fittings. 60A neoprene amd 80A neoprene fabricated the same way, they only differ in the number of fiber sleeves and the initial length of the actuators. 70A actuator was fabricated with two fiber sleeves to increase the strength of the actuator. The braided sleeves were cut to length and slid over the elastomers and barbed hydraulic fittings were used to crimp the braided sleeves to the elastomers. A layer of electric tape was adhered to the exterior of the fiber sleeves to reduce abrasion to the fibers at the fiber-fitting interface when crimped [146].”
6.3. Twist Fiber Fabrication
6.4. Ionic Polymer Fabrication
6.5. Shape Memory Polymer Fabrication
6.6. Shape Memory Alloy Fabrication
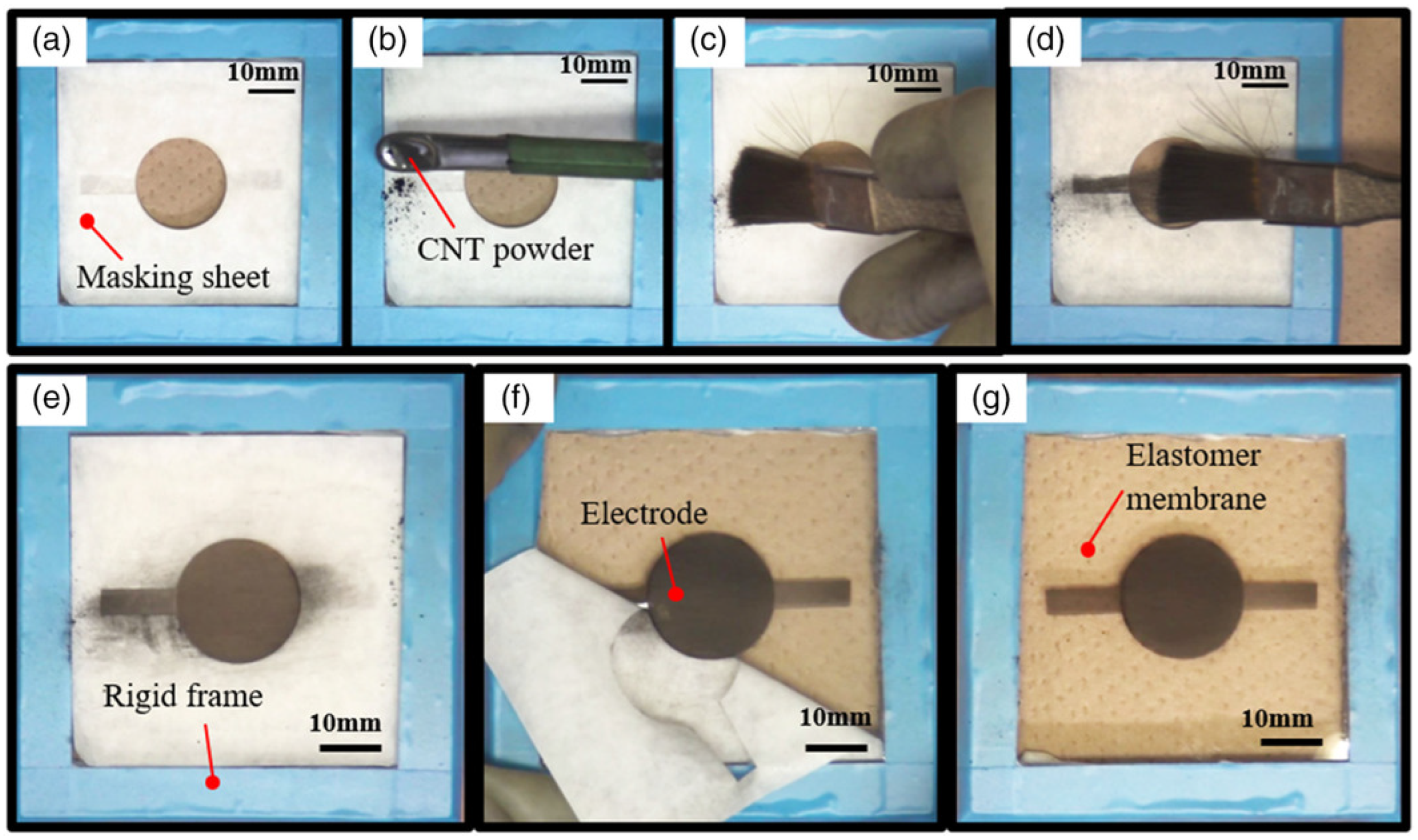
6.7. Dielectric Elastomer Fabrication
6.8. Liquid Crystal Elastomer Fabrication
6.9. Carbon Nanostructure Fabrication
6.9.1. Graphene
6.9.2. Carbon Nanotubes
6.9.3. Fullerene
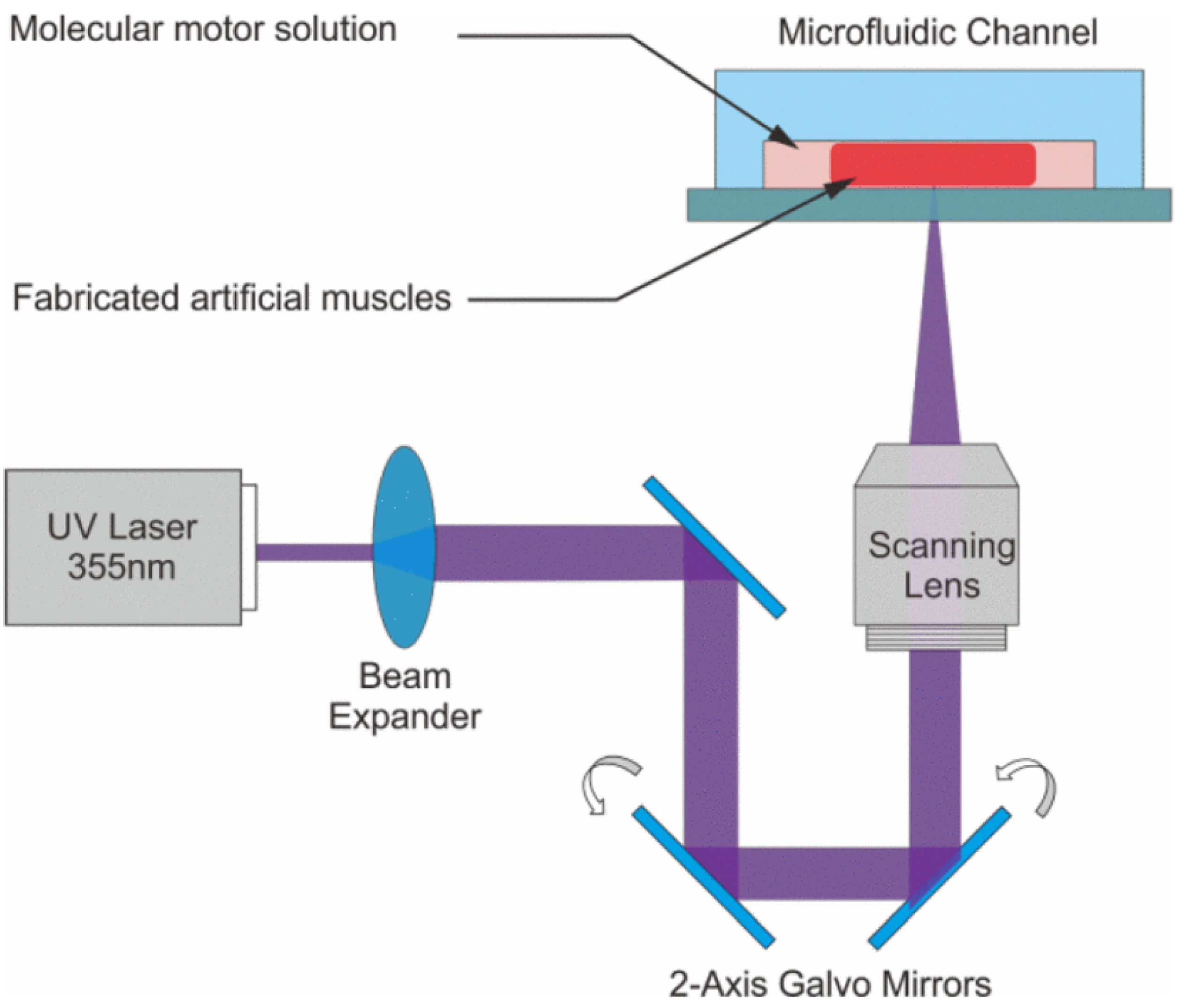
6.9.4. Motor Proteins
7. Conclusions
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Booth, J.W.; Case, J.C.; White, E.L.; Shah, D.S.; Kramer-Bottiglio, R. An addressable pneumatic regulator for distributed control of soft robots. In Proceedings of the 2018 IEEE International Conference on Soft Robotics (RoboSoft), Livorno, Italy, 24–28 April 2018; pp. 25–30. [Google Scholar] [CrossRef]
- Han, B.; Zhang, Y.L.; Zhu, L.; Li, Y.; Ma, Z.C.; Liu, Y.Q.; Zhang, X.L.; Cao, X.W.; Chen, Q.D.; Qiu, C.W.; et al. Plasmonic-Assisted Graphene Oxide Artificial Muscles. Adv. Mater. 2019, 31, e1806386. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Oveissi, F.; Fletcher, D.F.; Dehghani, F.; Naficy, S. Tough hydrogels for soft artificial muscles. Mater. Des. 2021, 203, 109609. [Google Scholar] [CrossRef]
- Elsamanty, M.; Eltayeb, A.; Wahby Shalaby, M.A. Design and FEA-based methodology for a novel 3 Parallel soft muscle actuator. In Proceedings of the 2021 3rd Novel Intelligent and Leading Emerging Sciences Conference (NILES), Giza, Egypt, 23–25 October 2021; pp. 394–399. [Google Scholar] [CrossRef]
- Helps, T.; Rossiter, J. Proprioceptive Flexible Fluidic Actuators Using Conductive Working Fluids. Soft Robot. 2018, 5, 175–189. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hu, W.; Lum, G.; Mastrangeli, M.; Sitti, M. Small-scale soft-bodied robot with multimodal locomotion. Nature 2018, 554, 81–85. [Google Scholar] [CrossRef]
- Boyraz, P.; Runge, G.; Raatz, A. An Overview of Novel Actuators for Soft Robotics. Actuators 2018, 7, 48. [Google Scholar] [CrossRef] [Green Version]
- Do, T.N.; Phan, H.; Nguyen, T.-Q.; Visell, Y. Miniature Soft Electromagnetic Actuators for Robotic Applications. Adv. Funct. Mater. 2018, 28, 1800244. [Google Scholar] [CrossRef]
- Chen, Y.; Chen, C.; Rehman, H.U.; Zheng, X.; Li, H.; Liu, H.; Hedenqvist, M.S. Shape-memory polymeric artificial muscles: Mechanisms, applications and challenges. Molecules 2020, 25, 4246. [Google Scholar] [CrossRef]
- Wang, J.; Gao, D.; Lee, P.S. Recent Progress in Artificial Muscles for Interactive Soft Robotics. Adv. Mater. 2021, 33, 2003088. [Google Scholar] [CrossRef]
- Farhan, M.; Behl, M.; Kratz, K.; Lendlein, A. Origami hand for soft robotics driven by thermally controlled polymeric fiber actuators. MRS Commun. 2021, 11, 476–482. [Google Scholar] [CrossRef]
- Jiao, Z.; Zhang, C.; Ruan, J.; Tang, W.; Lin, Y.; Zhu, P.; Wang, J.; Wang, W.; Yang, H.; Zou, J. Re-foldable origami-inspired bidirectional twisting of artificial muscles reproduces biological motion. Cell Rep. Phys. Sci. 2021, 2, 100407. [Google Scholar] [CrossRef]
- Jiao, Z.; Zhang, C.; Wang, W.; Pan, M.; Yang, H.; Zou, J. Advanced Artificial Muscle for Flexible Material-Based Reconfigurable Soft Robots. Adv. Sci. 2019, 6, 1901371. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Drotman, D.; Ishida, M.; Jadhav, S.; Tolley, M.T. Application-Driven Design of Soft, 3-D Printed, Pneumatic Actuators with Bellows. IEEE/ASME Trans. Mechatron. 2019, 24, 78–87. [Google Scholar] [CrossRef]
- Grellmann, H.; Lohse, F.M.; Kamble, V.G.; Winger, H.; Nocke, A.; Hickmann, R.; Wießner, S.; Cherif, C. Fundamentals and working mechanisms of artificial muscles with textile application in the loop. Smart Mater. Struct. 2021, 31, 023001. [Google Scholar] [CrossRef]
- Dong, L.; Zhao, Y. Photothermally driven liquid crystal polymer actuators. Mater. Chem. Front. 2018, 2, 1932. [Google Scholar] [CrossRef]
- Davidson, E.C.; Kotikian, A.; Li, S.; Aizenberg, J.; Lewis, J.A. 3D Printable and Reconfigurable Liquid Crystal Elastomers with Light-Induced Shape Memory via Dynamic Bond Exchange. Adv. Mater. 2020, 32, 1905682. [Google Scholar] [CrossRef]
- He, Q.; Wang, Z.; Song, Z.; Cai, S. Bioinspired Design of Vascular Artificial Muscle. Adv. Mater. Technol. 2019, 4, 1800244. [Google Scholar] [CrossRef] [Green Version]
- Ge, F.; Yang, R.; Tong, X.; Camerel, F.; Zhao, Y. A Multifunctional Dye-doped Liquid Crystal Polymer Actuator: Light-Guided Transportation, Turning in Locomotion, and Autonomous Motion. Angew. Chem. 2018, 130, 11932–11937. [Google Scholar] [CrossRef]
- He, Q.; Wang, Z.; Wang, Y.; Minori, A.; Tolley, M.T.; Cai, S. Electrically controlled liquid crystal elastomer-based soft tubular actuator with multimodal actuation. Sci. Adv. 2019, 5, eaax5746. [Google Scholar] [CrossRef] [Green Version]
- Song, Z.; Fu, Z.; Romano, D.; Dario, P.; Dai, J.S. A novel biomimetic compliant structural skin based on composite materials for biorobotics applications. Soft Robot. 2022, 9, 440–450. [Google Scholar] [CrossRef]
- Case, J.C.; Booth, J.; Shah, D.S.; Yuen, M.C.; Kramer-Bottiglio, R. State and stiffness estimation using robotic fabrics. In Proceedings of the 2018 IEEE International Conference on Soft Robotics (RoboSoft), Livorno, Italy, 24–28 April 2018; pp. 522–527. [Google Scholar] [CrossRef]
- Case, J.C.; Yuen, M.C.; Jacobs, J.; Kramer-Bottiglio, R. Robotic Skins That Learn to Control Passive Structures. IEEE Robot. Autom. Lett. 2019, 4, 2485–2492. [Google Scholar] [CrossRef]
- Choi, I.; Corson, N.; Peiros, L.; Hawkes, E.W.; Keller, S.; Follmer, S. A Soft, Controllable, High Force Density Linear Brake Utilizing Layer Jamming. IEEE Robot. Autom. Lett. 2018, 3, 450–457. [Google Scholar] [CrossRef]
- Liu, M.; Wang, Z.; Ikeuchi, D.; Fu, J.; Wu, X. Design and Simulation of a Flexible Bending Actuator for Solar Sail Attitude Control. Aerospace 2021, 8, 372. [Google Scholar] [CrossRef]
- Leng, X.; Hu, X.; Zhao, W.; An, B.; Zhou, X.; Liu, Z. Recent Advances in Twisted-Fiber Artificial Muscles. Adv. Intell. Syst. 2021, 3, 2000185. [Google Scholar] [CrossRef]
- Dai, S.; Zhou, X.; Hu, X.; Dong, X.; Jiang, Y.; Cheng, G.; Yuan, N.; Ding, J. Carbon nanotube hybrid yarn with mechanically strong healable silicone elastomers for artificial muscle. ACS Appl. Nano Mater. 2021, 4, 5123–5130. [Google Scholar] [CrossRef]
- Mu, J.; Andrade, M.J.D.; Fang, S.; Wang, X.; Gao, E.; Li, N.; Kim, S.H.; Wang, H.; Hou, C.; Zhang, Q.; et al. Sheath-run artificial muscles. Science 2019, 365, 150–155. [Google Scholar] [CrossRef] [PubMed]
- Aziz, S.; Villacorta, B.; Naficy, S.; Salahuddin, B.; Gao, S.; Baigh, T.A.; Sangian, D.; Zhu, Z. A microwave powered polymeric artificial muscle. Appl. Mater. Today 2021, 23, 101021. [Google Scholar] [CrossRef]
- Al-Rubaiai, M.; Pinto, T.; Qian, C.; Tan, X. Soft Actuators with Stiffness and Shape Modulation Using 3D-Printed Conductive Polylactic Acid Material. Soft Robot. 2019, 6, 318–332. [Google Scholar] [CrossRef]
- Chen, Y.; Zhao, H.; Mao, J.; Chirarattananon, P.; Helbling, E.F.; Hyun, N.-S.P.; Clarke, D.R.; Wood, R.J. Controlled flight of a microrobot powered by soft artificial muscles. Nature 2019, 575, 324–329. [Google Scholar] [CrossRef]
- Bai, L.; Liu, J.; Wang, Z.; Zou, S. Optimal Design of the Shape of a Non-Ball Mandrel for Thin-Walled Tube Small Radius Cold Bending. Metals 2021, 11, 1221. [Google Scholar] [CrossRef]
- Arachchige, D.D.K.; Chen, Y.; Walker, I.D.; Godage, I.S. A novel variable stiffness soft robotic gripper. In Proceedings of the 2021 IEEE 17th International Conference on Automation Science and Engineering (CASE), Lyon, France, 23–27 August 2021; pp. 2222–2227. [Google Scholar] [CrossRef]
- Feng, Y.; Ide, T.; Nabae, H.; Endo, G.; Sakurai, R.; Ohno, S.; Suzumori, K. Safety-enhanced control strategy of a power soft robot driven by hydraulic artificial muscles. Robomech. J. 2021, 8, 10. [Google Scholar] [CrossRef]
- Chi, H.; Su, H.; Liang, W.; Ren, Q. Control of a Rehabilitation Robotic Device Driven by Antagonistic Soft Actuators. Actuators 2021, 10, 123. [Google Scholar] [CrossRef]
- Zhu, G.; Xiao, X.; Li, C.; Ma, J.; Ponraj, G.; Prituja, A.V.; Ren, H.A. Bimanual Robotic Teleoperation Architecture with Anthropomorphic Hybrid Grippers for Unstructured Manipulation Tasks. Appl. Sci. 2020, 10, 2086. [Google Scholar] [CrossRef] [Green Version]
- Devaraj, H.; Yellapantula, K.; Stratta, M.; McDaid, A.; Aw, K. Embedded piezoresistive pressure sensitive pillars from piezoresistive carbon black composites towards a soft large-strain compressive load sensor. Sens. Actuators A Phys. 2019, 285, 645–651. [Google Scholar] [CrossRef]
- Guo, J.; Low, J.-H.; Liang, X.; Lee, J.S.; Wong, Y.-R.; Yeow, R.C.H. A Hybrid Soft Robotic Surgical Gripper System for Delicate Nerve Manipulation in Digital Nerve Repair Surgery. IEEE/ASME Trans. Mechatron. 2019, 24, 1440–1451. [Google Scholar] [CrossRef]
- Wang, R.; Shen, Y.; Qian, D.; Sun, J.; Zhou, X.; Wang, W.; Liu, Z. Tensile and torsional elastomer fiber artificial muscle by entropic elasticity with thermo-piezoresistive sensing of strain and rotation by a single Electric Signal. Mater. Horiz. 2020, 7, 3305–3315. [Google Scholar] [CrossRef]
- He, Y.; Zhang, X.; Zhu, L.; Sun, G.; Lou, X.; Dong, M. Optical Fiber Sensor Performance Evaluation in Soft Polyimide Film with Different Thickness Ratios. Sensors 2019, 19, 790. [Google Scholar] [CrossRef] [Green Version]
- Haghshenas-Jaryani, M.; Pande, C.; Wijesundara, B.J.M. Soft Robotic Bilateral Hand Rehabilitation System for Fine Motor Learning. In Proceedings of the 2019 IEEE 16th International Conference on Rehabilitation Robotics (ICORR), Toronto, ON, Canada, 24–28 June 2019; pp. 337–342. [Google Scholar] [CrossRef]
- Fleming, C.L.; Shiming, L.; Morten, G.; Joakim, A. Shining New Light on the Spiropyran Photoswitch: A Photocage Decides between cis–trans or Spiro-Merocyanine Isomerization. Am. Chem. Soc. 2018, 140, 14069–14072. [Google Scholar] [CrossRef] [Green Version]
- Belding, L.; Baytekin, B.; Baytekin, H.T.; Rothemund, P.; Verma, M.S.; Nemiroski, A.; Sameoto, D.; Grzybowski, B.A.; Whitesides, G.M. Slit Tubes for Semisoft Pneumatic Actuators. Adv. Mater. 2018, 30, 1704446. [Google Scholar] [CrossRef] [Green Version]
- Diteesawat, R.S.; Helps, T.; Taghavi, M.; Rossiter, J. Characteristic Analysis and Design Optimization of Bubble Artificial Muscles. Soft Robot. 2021, 8, 186–199. [Google Scholar] [CrossRef]
- Zhang, J.; Sheng, J.; O’Neill, C.T.; Walsh, C.J.; Wood, R.J.; Ryu, J.H.; Desai, J.P.; Yip, M.C. Robotic Artificial Muscles: Current Progress and Future Perspectives. IEEE Trans. Robot. 2019, 35, 761–781. [Google Scholar] [CrossRef]
- Mirvakili, S.M.; Hunter, I.W. Artificial Muscles: Mechanisms, Applications, and Challenges. Adv. Mater. 2018, 30, 1704407. [Google Scholar] [CrossRef]
- Shi, M.; Yeatman, E.M. A comparative review of artificial muscles for microsystem applications. Microsyst. Nanoeng. 2021, 7, 95. [Google Scholar] [CrossRef] [PubMed]
- Mirvakili, S.M.; Sim, D.; Hunter, I.W.; Langer, R. Actuation of untethered pneumatic artificial muscles and soft robots using magnetically induced liquid-to-gas phase transitions. Sci. Robot. 2020, 5, eaaz4239. [Google Scholar] [CrossRef] [PubMed]
- Liang, W.; Liu, H.; Wang, K.; Qian, Z.; Ren, L.; Ren, L. Comparative study of robotic artificial actuators and biological muscle. Adv. Mech. Eng. 2020, 12, 168781402093340. [Google Scholar] [CrossRef]
- Mohan, V.B.; Lau, K.-T.; Hui, D.; Bhattacharyya, D. Graphene-based materials and their composites: A review on production, applications and product limitations. Compos. Part B Eng. 2018, 142, 200–220. [Google Scholar] [CrossRef]
- Tiwari, S.K.; Sahoo, S.; Wang, N.; Huczko, A. Graphene research and their outputs: Status and Prospect. J. Sci. Adv. Mater. Devices 2020, 5, 10–29. [Google Scholar] [CrossRef]
- Yang, Z.; Li, F.; Li, W.; Chen, D.; Li, S. Effect of carbon nanotubes on porosity and mechanical properties of slag-based geopolymer. Arab. J. Sci. Eng. 2021, 46, 10731–10738. [Google Scholar] [CrossRef]
- Hyeon, J.S.; Park, J.W.; Baughman, R.H.; Kim, S.J. Electrochemical graphene/carbon nanotube yarn artificial muscles. Sens. Actuators B Chem. 2019, 286, 237–242. [Google Scholar] [CrossRef]
- Hwang, T.; Kwon, H.; Oh, J.; Hong, J.; Hong, S.; Lee, Y.; Choi, H.R.; Kim, K.J.; Bhuiya, M.H.; Nam, J.D. Transparent actuator made with few layer graphene electrode and dielectric elastomer, for variable focus lens. Appl. Phys. Lett. 2013, 103, 023106. [Google Scholar] [CrossRef] [Green Version]
- Foroughi, J.; Spinks, G. Carbon nanotube and graphene fiber artificial muscles. Nanoscale Adv. 2019, 1, 4592–4614. [Google Scholar] [CrossRef] [Green Version]
- Papageorgiou, D.G.; Kinloch, I.A.; Young, R.J. Mechanical properties of graphene and graphene-based nanocomposites. Prog. Mater. Sci. 2017, 90, 75–127. [Google Scholar] [CrossRef]
- Aziz, S.; Martinez, J.G.; Foroughi, J.; Spinks, G.M.; Jager, E.W. Artificial muscles from hybrid carbon nanotube-polypyrrole-coated twisted and coiled yarns. Macromol. Mater. Eng. 2020, 305, 2000421. [Google Scholar] [CrossRef]
- Piao, C.; Jang, H.; Lim, T.G.; Kim, H.; Choi, H.R.; Hao, Y.; Suk, J.W. Enhanced dynamic performance of twisted and coiled soft actuators using graphene coating. Compos. Part B Eng. 2019, 178, 107499. [Google Scholar] [CrossRef]
- Hwang, T.; Frank, Z.; Neubauer, J.; Kim, K.J. High-performance polyvinyl chloride gel artificial muscle actuator with graphene oxide and plasticizer. Sci. Rep. 2019, 9, 9658. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Akinwande, D.; Brennan, C.J.; Bunch, J.S.; Egberts, P.; Felts, J.R.; Gao, H.; Huang, R.; Kim, J.-S.; Li, T.; Li, Y.; et al. A review on mechanics and mechanical properties of 2D materials-graphene and beyond. Extrem. Mech. Lett. 2017, 13, 42–77. [Google Scholar] [CrossRef] [Green Version]
- Jia, G.; Zheng, A.; Wang, X.; Zhang, L.; Li, L.; Li, C.; Zhang, Y.; Cao, L. Flexible, biocompatible and highly conductive mxene-graphene oxide film for smart actuator and humidity sensor. Sens. Actuators B Chem. 2021, 346, 130507. [Google Scholar] [CrossRef]
- More, M.P.; Patil, M.D.; Pandey, A.P.; Patil, P.O.; Deshmukh, P.K. Fabrication and characterization of graphene-based hybrid nanocomposite: Assessment of antibacterial potential and biomedical application. Artif. Cells Nanomed. Biotechnol. 2016, 45, 1496–1508. [Google Scholar] [CrossRef] [Green Version]
- Omoriyekomwan, J.E.; Tahmasebi, A.; Dou, J.; Wang, R.; Yu, J. A review on the recent advances in the production of carbon nanotubes and carbon nanofibers via microwave-assisted pyrolysis of biomass. Fuel Process. Technol. 2020, 214, 106686. [Google Scholar] [CrossRef]
- Ganesh, E.N. Single Walled and Multi Walled Carbon Nanotube Structure, Synthesis and Applications. Int. J. Innov. Technol. Explor. Eng. 2013, 2, 311–320. [Google Scholar] [CrossRef]
- Qiu, Y.; Zhang, E.; Plamthottam, R.; Pei, Q. Dielectric elastomer artificial muscle: Materials innovations and device explorations. Acc. Chem. Res. 2019, 52, 316–325. [Google Scholar] [CrossRef]
- Fadodun, O.G.; Amosun, A.A.; Okoli, N.L.; Olaloye, D.O.; Ogundeji, J.A.; Durodola, S.S. Numerical investigation of entropy production in SWCNT/H2O nanofluid flowing through inwardly corrugated tube in turbulent flow regime. J. Therm. Anal. Calorim. 2021, 144, 1451–1466. [Google Scholar] [CrossRef]
- Yang, J.; Yao, J.; Wang, S. Electromechanical Response Performance of a Reinforced Biomass Gel Artificial Muscle Based on Natural Polysaccharide of Sodium Alginate Doped with an Ionic Liquid for Micro-Nano Regulation. Carbohydr. Polym. 2022, 275, 118717. [Google Scholar] [CrossRef] [PubMed]
- Liu, X.; Ji, H.; Liu, B.; Yang, Q. All-solid-state carbon-nanotube-fiber-based finger-muscle and robotic gripper. Int. J. Smart Nano Mater. 2022, 13, 64–78. [Google Scholar] [CrossRef]
- Xu, L.; Peng, Q.; Zhao, X.; Li, P.; Xu, J.; He, X. A photoactuator based on stiffness-variable carbon nanotube nanocomposite yarn. ACS Appl. Mater. Interfaces 2020, 12, 40711–40718. [Google Scholar] [CrossRef]
- Lee, J.A.; Li, N.; Haines, C.S.; Kim, K.J.; Lepró, X.; Ovalle-Robles, R.; Kim, S.J.; Baughman, R.H. Electrochemically powered, energy-conserving carbon nanotube artificial muscles. Adv. Mater. 2017, 29, 1700870. [Google Scholar] [CrossRef]
- Zheng, T.; Pour Shahid Saeed Abadi, P.; Seo, J.; Cha, B.-H.; Miccoli, B.; Li, Y.-C.; Park, K.; Park, S.; Choi, S.-J.; Bayaniahangar, R.; et al. Biocompatible carbon nanotube-based Hybrid Microfiber for implantable electrochemical actuator and Flexible Electronic Applications. ACS Appl. Mater. Interfaces 2019, 11, 20615–20627. [Google Scholar] [CrossRef]
- Kumar, A.; Sharma, K.; Dixit, A.R. Carbon nanotube- and graphene-reinforced multiphase polymeric composites: Review on their properties and applications. J. Mater. Sci. 2020, 55, 2682–2724. [Google Scholar] [CrossRef]
- Zhang, H.; Quan, L.; Gao, A.; Tong, Y.; Shi, F.; Xu, L. The structure and properties of polyacrylonitrile nascent composite fibers with grafted multi walled carbon nanotubes prepared by wet spinning method. Polymers 2019, 11, 422. [Google Scholar] [CrossRef] [Green Version]
- Yu, Y.; Li, L.; Liu, E.; Han, X.; Wang, J.; Xie, Y.-X.; Lu, C. Light-driven core-shell fiber actuator based on carbon nanotubes/liquid crystal elastomer for artificial muscle and phototropic locomotion. Carbon 2022, 187, 97–107. [Google Scholar] [CrossRef]
- Kaplan-Ashiri, I.; Tenne, R. On the mechanical properties of WS2 and mos2 nanotubes and fullerene-like nanoparticles: In situ electron microscopy measurements. JOM 2015, 68, 151–167. [Google Scholar] [CrossRef]
- Wang, B.; Gao, X.; Piao, G. Fabrication of C60 fullerene nanofibers by Volatile Diffusion Method. J. Nanomater. 2013, 2013, 646040. [Google Scholar] [CrossRef] [Green Version]
- Rajagopalan, M.; Oh, I.-K.; Palanivel, J.; Sabarathinam, S.; Cifuentes-Faura, J. Fabrication and characterizations of electro-mechanical actuators based on fullerene-reinforced biocompatible polymer. Sens. Actuators A Phys. 2022, 339, 113510. [Google Scholar] [CrossRef]
- Jung, J.-H.; Vadahanambi, S.; Oh, I.-K. Electro-active nano-composite actuator based on fullerene-reinforced Nafion. Compos. Sci. Technol. 2010, 70, 584–592. [Google Scholar] [CrossRef]
- Rajagopalan, M.; Oh, I.-K. Fullerenol-based electroactive artificial muscles utilizing biocompatible polyetherimide. ACS Nano 2011, 5, 2248–2256. [Google Scholar] [CrossRef] [PubMed]
- Nam, S.; Lee, S.; Roh, A.; Son, H.; Kim, M.; Choi, H. Role of supersaturated al-C phases in mechanical properties of Al/Fullerene Composites. Sci. Rep. 2021, 11, 13143. [Google Scholar] [CrossRef]
- Chen, J.; Leung, F.K.-C.; Stuart, M.C.; Kajitani, T.; Fukushima, T.; van der Giessen, E.; Feringa, B.L. Artificial muscle-like function from hierarchical supramolecular assembly of photoresponsive molecular motors. Nat. Chem. 2017, 10, 132–138. [Google Scholar] [CrossRef]
- Dogterom, M.; Koenderink, G.H. Actin–microtubule crosstalk in cell biology. Nat. Rev. Mol. Cell Biol. 2019, 20, 38–54. [Google Scholar] [CrossRef]
- Kortekaas, L.; Browne, W.R. The evolution of spiropyran: Fundamentals and progress of an extraordinarily versatile photochrome. Chem. Soc. Rev. 2019, 48, 3406–3424. [Google Scholar] [CrossRef] [Green Version]
- Higueras-Ruiz, D.R.; Nishikawa, K.; Feigenbaum, H.; Shafer, M. What is an artificial muscle? A comparison of soft actuators to biological muscles. Bioinspir. Biomim. 2021, 17, 011001. [Google Scholar] [CrossRef]
- Matsuda, K.; Kabir, A.M.R.; Akamatsu, N.; Saito, A.; Ishikawa, S.; Matsuyama, T.; Ditzer, O.; Islam, M.S.; Ohya, Y.; Sada, K.; et al. Artificial Smooth Muscle Model Composed of Hierarchically Ordered Microtubule Asters Mediated by DNA Origami Nanostructures. Nano Lett. 2019, 19, 3933–3938. [Google Scholar] [CrossRef]
- Phan, P.T.; Hoang, T.T.; Thai, M.T.; Low, H.; Davies, J.; Lovell, N.H.; Do, T.N. Smart surgical sutures using soft artificial muscles. Sci. Rep. 2021, 11, 22420. [Google Scholar] [CrossRef] [PubMed]
- Wang, Y.; Hiratsuka, Y.; Nitta, T.; Uesugi, K.; Morishima, K. Micro-Assembly Using Optically Patterned Molecular-Motor-Powered Artificial Muscles. In Proceedings of the 2019 IEEE 32nd International Conference on Micro Electromechanical Systems (MEMS), Micro Electromechanical Systems (MEMS), Seoul, Korea, 27–31 January 2019; pp. 573–575. [Google Scholar] [CrossRef]
- Thai, M.T.; Phan, P.T.; Hoang, T.T.; Low, H.; Lovell, N.H.; Do, T.N. Design, Fabrication, and Hysteresis Modeling of Soft Microtubule Artificial Muscle (SMAM) for Medical Applications. IEEE Robot. Autom. Lett. Robot. Autom. Lett. 2021, 6, 5089–5096. [Google Scholar] [CrossRef]
- Zhu, Q.L.; Dai, C.F.; Wagner, D.; Khoruzhenko, O.; Hong, W.; Breu, J.; Zheng, Q.; Wu, Z.L. Patterned Electrode Assisted One-Step Fabrication of Biomimetic Morphing Hydrogels with Sophisticated Anisotropic Structures. Adv. Sci. 2021, 8, 2102353. [Google Scholar] [CrossRef] [PubMed]
- Zhang, X.F.; Liu, Z.G.; Shen, W.; Gurunathan, S. Silver Nanoparticles: Synthesis, Characterization, Properties, Applications, and Therapeutic Approaches. Int. J. Mol. Sci. 2016, 17, 1534. [Google Scholar] [CrossRef]
- Yu, L.; Hu, T.; Yang, D.; Wei, Q. Enhanced electromechanical performance of natural rubber dielectric elastomers achieved by in situ synthesis of silver nanoparticles on TiO2 nanoparticles. IET Nano-Dielectr. 2022, 5, 39–49. [Google Scholar] [CrossRef]
- Xing, S.T.; Wang, P.P.; Liu, S.Q.; Xu, Y.H.; Zheng, R.M.; Deng, Z.F.; Peng, Z.F.; Li, J.Y.; Wu, Y.Y.; Liu, L. A shape-memory soft actuator integrated with reversible electric/moisture actuating and strain sensing. Compos. Sci. Technol. 2020, 193, 108133. [Google Scholar] [CrossRef]
- Cao, K.; Feng, S.; Han, Y.; Gao, L.; Hue Ly, T.; Xu, Z.; Lu, Y. Elastic straining of free-standing monolayer graphene. Nat. Commun. 2020, 11, 284. [Google Scholar] [CrossRef] [Green Version]
- Xu, X.; Pereira, L.; Wang, Y.; Zhang, K.; Zhao, X.; Bae, S.; Bui, C.T.; Xie, R.; Thong, J.T.L.; Hong, B.H.; et al. Length-dependent thermal conductivity in suspended single-layer graphene. Nat. Commun. 2014, 5, 3689. [Google Scholar] [CrossRef] [Green Version]
- Kizuka, T.; Saito, K.; Miyazawa, K.I. Young’s Modulus of Crystalline C60 Nanotubes Studied by in Situ Transmission Electron Microscopy. Diam. Relat. Mater. 2008, 17, 972–974. [Google Scholar] [CrossRef] [Green Version]
- Anvari, A. The Influence of CNT Structural Parameters on the Properties of CNT and CNT-Reinforced Epoxy. Int. J. Aerosp. Eng. 2020, 2020, 4873426. [Google Scholar] [CrossRef]
- Wang, Y.; Weng, G.J. Electrical Conductivity of Carbon Nanotube- and Graphene-Based Nanocomposites. In Micromechanics and Nanomechanics of Composite Solids; Springer: Cham, Switzerland, 2018. [Google Scholar] [CrossRef]
- Gupta, N.; Gupta, S.M.; Sharma, S.K. Carbon nanotubes: Synthesis, properties and engineering applications. Carbon Lett. 2019, 29, 419–447. [Google Scholar] [CrossRef]
- Das, S.; Halder, S.; Islam Khan, N. Mechanical properties of oxidized fullerene C60/epoxy nanocomposite. Mater. Today Proc. 2019, 18, 655–659. [Google Scholar] [CrossRef]
- Chen, L.; Wang, X.; Kumar, S. Thermal Transport in Fullerene Derivatives Using Molecular Dynamics Simulations. Sci. Rep. 2015, 5, 12763. [Google Scholar] [CrossRef] [PubMed]
- Yin, K.; Xue, Y.; Yu, Y.; Xie, S. Variable impedance control for bipedal robot standing balance based on artificial muscle activation model. J. Robot. 2021, 2021, 8142161. [Google Scholar] [CrossRef]
- Yeh, Y.C.; Creran, B.; Rotello, V.M. Gold nanoparticles: Preparation, properties, and applications in bionanotechnology. Nanoscale 2012, 4, 1871–1880. [Google Scholar] [CrossRef]
- Sani, A.; Cao, C.; Cui, D. Toxicity of gold nanoparticles (AuNPs): A review. Biochem. Biophys. Rep. 2021, 26, 100991. [Google Scholar] [CrossRef]
- Bhattarai, B.; Zaker, Y.; Bigioni, T.P. Green synthesis of gold and silver nanoparticles: Challenges and opportunities. Curr. Opin. Green Sustain. Chem. 2018, 12, 91–100. [Google Scholar] [CrossRef]
- Li, W.-Y.; Nabae, H.; Endo, G.; Suzumori, K. New Soft Robot hand configuration with combined Biotensegrity and thin artificial muscle. IEEE Robot. Autom. Lett. 2020, 5, 4345–4351. [Google Scholar] [CrossRef]
- Peng, Y.; Liu, Y.; Yang, Y.; Liu, N.; Sun, Y.; Liu, Y.; Pu, H.; Xie, S.; Luo, J. Development of continuum manipulator actuated by thin McKibben pneumatic artificial muscle. Mechatronics 2019, 60, 56–65. [Google Scholar] [CrossRef]
- Naclerio, N.D.; Hawkes, E.W. Simple, low-hysteresis, foldable, fabric pneumatic artificial muscle. IEEE Robot. Autom. Lett. 2020, 5, 3406–3413. [Google Scholar] [CrossRef]
- Wang, Y.; Liu, C.; Ren, L.; Ren, L. Bioinspired soft actuators with highly ordered skeletal muscle structures. Bio-Des. Manuf. 2022, 5, 174–188. [Google Scholar] [CrossRef]
- Yang, X.; Chang, L.; Pérez-Arancibia, N.O. An 88-milligram insect-scale autonomous crawling robot driven by a catalytic artificial muscle. Sci. Robot. 2020, 5, eaba0015. [Google Scholar] [CrossRef] [PubMed]
- Shu, J.; Ge, D.A.; Wang, E.; Ren, H.; Cole, T.; Tang, S.; Li, X.; Zhou, X.; Li, R.; Jin, H.; et al. A Liquid Metal Artificial Muscle. Adv. Mater. 2021, 33, 2103062. [Google Scholar] [CrossRef] [PubMed]
- Abrar, T.; Putzu, F.; Konstantinova, J.; Althoefer, K. EPAM: Eversive pneumatic artificial muscle. In Proceedings of the 2019 2nd IEEE International Conference on Soft Robotics (RoboSoft), Seoul Korea, 14–18 April 2019; pp. 19–24. [Google Scholar] [CrossRef]
- Al-Fahaam, H.; Davis, S.; Nefti-Meziani, S. The design and mathematical modelling of novel extensor bending pneumatic artificial muscles (EBPAMs) for soft exoskeletons. Robot. Auton. Syst. 2018, 99, 63–74. [Google Scholar] [CrossRef]
- Elgeneidy, K.; Lohse, N.; Jackson, M. Bending angle prediction and control of soft pneumatic actuators with embedded flex sensors-A data-driven approach. Mechatronics 2018, 50, 234–247. [Google Scholar] [CrossRef] [Green Version]
- Chen, T.; Bilal, O.R.; Shea, K.; Daraio, C. Harnessing bistability for directional propulsion of soft, untethered robots. Proc. Natl. Acad. Sci. USA 2018, 115, 5698–5702. [Google Scholar] [CrossRef] [Green Version]
- Guan, Q.; Sun, J.; Liu, Y.; Wereley, N.M.; Leng, J. Novel bending and helical extensile/contractile pneumatic artificial muscles inspired by Elephant Trunk. Soft Robot. 2020, 7, 597–614. [Google Scholar] [CrossRef]
- Jamil, B.; Choi, Y. Modified Stiffness-Based Soft Optical Waveguide Integrated Pneumatic Artificial Muscle (PAM) Actuators for Contraction and Force Sensing. IEEE/ASME Trans. Mechatron. 2021, 26, 3243–3253. [Google Scholar] [CrossRef]
- Sakurai, R.; Nishida, M.; Sakurai, H.; Wakao, Y.; Akashi, N.; Kuniyoshi, Y.; Minami, Y.; Nakajima, K. Emulating a sensor using soft material dynamics: A reservoir computing approach to pneumatic artificial muscle. In Proceedings of the 3rd IEEE International Conference on Soft Robotics (RoboSoft), New Haven, CT, USA, 15 May–15 July 2020; pp. 710–717. [Google Scholar] [CrossRef]
- Takosoglu, J. Angular position control system of pneumatic artificial muscles. Open Eng. 2020, 10, 681–687. [Google Scholar] [CrossRef]
- Maloisel, G.; Knoop, E.; Schumacher, C.; Bächer, M. Automated Routing of Muscle Fibers for Soft Robots. IEEE Trans. Robot. 2021, 37, 996–1008. [Google Scholar] [CrossRef]
- Zhou, D.; Fu, Y.; Deng, J.; Sun, J.; Liu, Y. A bistable jumping robot with pure soft body actuated by twisted artificial muscle. In Proceedings of the 2021 27th International Conference on Mechatronics and Machine Vision in Practice (M2VIP), Shanghai, China, 26–28 November 2021. [Google Scholar] [CrossRef]
- Joe, S.; Totaro, M.; Wang, H.; Beccai, L. Development of the Ultralight Hybrid Pneumatic Artificial Muscle: Modelling and Optimization. PLoS ONE 2021, 16, e0250325. [Google Scholar] [CrossRef] [PubMed]
- Kim, W.; Park, H.; Kim, J. Compact flat fabric pneumatic artificial muscle (ffpam) for soft wearable robotic devices. IEEE Robot. Autom. Lett. 2021, 6, 2603–2610. [Google Scholar] [CrossRef]
- Xie, D.; Zuo, S.; Liu, J. A novel flat modular pneumatic artificial muscle. Smart Mater. Struct. 2020, 29, 065013. [Google Scholar] [CrossRef]
- Wirekoh, J.; Valle, L.; Pol, N.; Park, Y.-L. Sensorized, flat, pneumatic artificial muscle embedded with biomimetic microfluidic sensors for proprioceptive feedback. Soft Robot. 2019, 6, 768–777. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Pal, S.; Sarkar, D.; Roy, S.S.; Kumar, A.; Arora, A. Development of a stretchable and flexible conductive fabric based sensorized pneumatic artificial muscle. In Proceedings of the 4th International Conference on Electronics, Communication and Aerospace Technology (ICECA), Coimbatore, India, 5–7 November 2020; pp. 339–344. [Google Scholar] [CrossRef]
- Xie, D.; Ma, Z.; Liu, J.; Zuo, S. Pneumatic artificial muscle based on novel winding method. Actuators 2021, 10, 100. [Google Scholar] [CrossRef]
- Sy, L.; Hoang, T.T.; Bussu, M.; Thai, M.T.; Phan, P.T.; Low, H.; Tsai, D.; Brodie, M.A.; Lovell, N.H.; Do, T.N. M-sam: Miniature and soft artificial muscle-driven wearable robotic fabric exosuit for upper limb augmentation. In Proceedings of the IEEE 4th International Conference on Soft Robotics (RoboSoft), New Haven, CT, USA, 12–16 April 2021; pp. 575–578. [Google Scholar] [CrossRef]
- Parreira, R.; Özelçi, E.; Sakar, M.S. Remotely Controlled Colloidal Assembly of Soft Microrobotic Artificial Muscle. Adv. Intell. Syst. 2020, 2, 2000062. [Google Scholar] [CrossRef]
- Li, M.; Tang, Y.; Soon, R.H.; Dong, B.; Hu, W.; Sitti, M. Miniature coiled artificial muscle for wireless soft medical devices. Sci. Adv. 2022, 8, eabm5616. [Google Scholar] [CrossRef]
- Luong, T.; Seo, S.; Jeon, J.; Park, C.; Doh, M.; Ha, Y.; Koo, J.C.; Choi, H.R.; Moon, H. Soft artificial muscle with proprioceptive feedback: Design, modeling and Control. IEEE Robot. Autom. Lett. 2022, 7, 4797–4804. [Google Scholar] [CrossRef]
- Sim, H.J.; Jang, Y.; Kim, H.; Choi, J.G.; Park, J.W.; Lee, D.Y.; Kim, S.J. Self-helical fiber for glucose-responsive artificial muscle. ACS Appl. Mater. Interfaces 2020, 12, 20228–20233. [Google Scholar] [CrossRef]
- Sun, J.; Tighe, B.; Liu, Y.; Zhao, J. Twisted-and-coiled actuators with free strokes enable soft robots with programmable motions. Soft Robot. 2021, 8, 213–225. [Google Scholar] [CrossRef]
- Fan, L.F.; Rong, M.Z.; Zhang, M.Q.; Chen, X.D. Repeated Intrinsic Self-Healing of Wider Cracks in Polymer via Dynamic Reversible Covalent Bonding Molecularly Combined with a Two-Way Shape Memory Effect. ACS Appl. Mater. Interfaces 2018, 10, 38538–38546. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Jeong, J.; Hyeon, K.; Jang, S.-Y.; Chung, C.; Hussain, S.; Ahn, S.-Y.; Bok, S.-K.; Kyung, K.-U. Soft wearable robot with shape memory alloy (sma)-based artificial muscle for assisting with elbow flexion and forearm supination/pronation. IEEE Robot. Autom. Lett. 2022, 7, 6028–6035. [Google Scholar] [CrossRef]
- Gao, Y.; Liu, W.; Zhu, S. Reversible Shape Memory Polymer from Semicrystalline Poly(ethylene-co-vinyl acetate) with Dynamic Covalent Polymer Networks. Macromolecules 2018, 51, 8956–8963. [Google Scholar] [CrossRef]
- Duduta, M.; Hajiesmaili, E.; Zhao, H.; Wood, R.J.; Clarke, D.R. Realizing the potential of dielectric elastomer artificial muscles. Proc. Natl. Acad. Sci. USA 2019, 116, 2476–2481. [Google Scholar] [CrossRef] [Green Version]
- Mazar, F.M.; Martinez, J.G.; Tyagi, M.; Alijanianzadeh, M.; Turner, A.P.F.; Jager, E.W.H. Artificial Muscles Powered by Glucose. Adv. Mater. 2019, 31, 1901677. [Google Scholar] [CrossRef]
- Liao, J.; Majidi, C. Soft actuators by electrochemical oxidation of liquid metal surfaces. Soft Matter 2020, 17, 1921–1928. [Google Scholar] [CrossRef]
- Liu, H.; Tian, H.; Shao, J.; Wang, Z.; Li, X.; Wang, C.; Chen, X. An electrically actuated soft artificial muscle based on a high-performance flexible electrothermal film and Liquid-Crystal Elastomer. ACS Appl. Mater. Interfaces 2020, 12, 56338–56349. [Google Scholar] [CrossRef]
- Tu, Z.; Liu, W.; Wang, J.; Qiu, X.; Huang, J.; Li, J.; Lou, H. Biomimetic high performance artificial muscle built on sacrificial coordination network and mechanical training process. Nat. Commun. 2021, 12, 2916. [Google Scholar] [CrossRef]
- Won, P.; Kim, K.K.; Kim, H.; Park, J.J.; Ha, I.; Shin, J.; Jung, J.; Cho, H.; Kwon, J.; Lee, H.; et al. Transparent Soft Actuators/Sensors and Camouflage Skins for Imperceptible Soft Robotics. Adv. Mater. 2020, 33, 2002397. [Google Scholar] [CrossRef]
- Yuan, J.; Wu, Y.; Wang, B.; Qiao, H. Musculoskeletal robot with Motor Driven Artificial Muscle. In Proceedings of the 6th IEEE International Conference on Advanced Robotics and Mechatronics (ICARM), Chongqing, China, 3–5 July 2021; pp. 448–452. [Google Scholar] [CrossRef]
- Xiao, W.; Du, X.; Chen, W.; Yang, G.; Hu, D.; Han, X. Cooperative collapse of helical structure enables the actuation of twisting pneumatic artificial muscle. Int. J. Mech. Sci. 2021, 201, 106483. [Google Scholar] [CrossRef]
- Jamil, B.; Lee, S.; Choi, Y. Fabrication, Characterization and Control of Knit-Covered Pneumatic Artificial Muscle. IEEE Access. 2019, 7, 84770–84783. [Google Scholar] [CrossRef]
- Al-Ibadi, A.; Nefti-Meziani, S.; Davis, S.; Theodoridis, T. Novel Design and Position Control Strategy of a Soft Robot Arm. Robotics 2018, 7, 72. [Google Scholar] [CrossRef] [Green Version]
- Thomalla, S.D.; Van de Ven, J.D. Modeling and Implementation of the McKibben Actuator in Hydraulic Systems. IEEE Trans. Robot. 2018, 34, 1593–1602. [Google Scholar] [CrossRef]
- Hwang, I.; Mun, S.; Shin, H.; Yun, S. A NIR-Light-Driven Twisted and Coiled Polymer Actuator with a PEDOT-Tos/Nylon-6 Composite for Durable and Remotely Controllable Artificial Muscle. Polymers 2022, 14, 432. [Google Scholar] [CrossRef] [PubMed]
- Sun, J.; Zhao, J. Integrated Actuation and Self-Sensing for Twisted-and-Coiled Actuators with Applications to Innervated Soft Robots. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 24 October 2020–24 January 2021; pp. 8795–8800. [Google Scholar] [CrossRef]
- Wang, Y.; Sugino, T. Ionic Polymer Actuators: Principle, Fabrication and Applications. In Actuators; IntechOpen: London, UK, 2018. [Google Scholar] [CrossRef] [Green Version]
- Peixoto, C.; Zille, A.; Ferreira da Silva, A.; Carneiro, O.S. Shape memory polymers as actuators: Characterization of the relevant parameters under constrained recovery. Polym. Eng. Sci. 2021, 61, 2522. [Google Scholar] [CrossRef]
- Scalet, G. Two-Way and Multiple-Way Shape Memory Polymers for Soft Robotics: An Overview. Actuators 2020, 9, 10. [Google Scholar] [CrossRef] [Green Version]
- Akbari, S.; Sakhaei, A.H.; Panjwani, S.; Kowsari, K.; Ge, Q. Shape memory alloy based 3D printed composite actuators with variable stiffness and large reversible deformation. Sens. Actuators A Phys. 2021, 321, 112598. [Google Scholar] [CrossRef]
- Yang, S.Y.; Kim, K.; Seo, S.; Shin, D.; Park, J.H.; Gong, Y.J.; Choi, H.R. Hybrid Antagonistic System With Coiled Shape Memory Alloy and Twisted and Coiled Polymer Actuator for Lightweight Robotic Arm. IEEE Robot. Autom. Lett. 2022, 7, 4496–4503. [Google Scholar] [CrossRef]
- Jiang, S.; Yu, J.; Hu, L.; Zhang, Y. Investigation on Deformation Mechanisms of NiTi Shape Memory Alloy Tube under Radial Loading. Metals 2017, 7, 268. [Google Scholar] [CrossRef] [Green Version]
- Patel, S.K.; Swain, B.; Roshan, R.; Sahu, N.K.; Behera, A. A brief review of shape memory effects and fabrication processes of NITI shape memory alloys. Mater. Today Proc. 2020, 33, 5552–5556. [Google Scholar] [CrossRef]
- Hajiesmaili, E.; Clarke, D.R. Dielectric elastomer actuators. J. Appl. Phys. 2021, 129, 151102. [Google Scholar] [CrossRef]
- Wiranata, A.; Ishii, Y.; Hosoya, N.; Maeda, S. Simple and Reliable Fabrication Method for Polydimethylsiloxane Dielectric Elastomer Actuators Using Carbon Nanotube Powder Electrodes. Adv. Eng. Mater. 2021, 23, 2001181. [Google Scholar] [CrossRef]
- Kularatne, R.S.; Kim, H.; Boothby, J.M.; Ware, T.H. Liquid Crystal Elastomer actuators: Synthesis, alignment, and applications. J. Polym. Sci. Part B Polym. Phys. 2017, 55, 395–411. [Google Scholar] [CrossRef]
- Rogóż, M.; Haberko, J.; Wasylczyk, P. Light-Driven Linear Inchworm Motor Based on Liquid Crystal Elastomer Actuators Fabricated with Rubbing Overwriting. Materials 2021, 14, 6688. [Google Scholar] [CrossRef] [PubMed]
- Hong, N.; Kireev, D.; Zhao, Q.; Chen, D.; Akinwande, D.; Li, W. Roll-to-Roll Dry Transfer of Large-Scale Graphene. Adv. Mater. 2022, 34, 2106615. [Google Scholar] [CrossRef] [PubMed]
- Al Faruque, M.A.; Syduzzaman, M.; Sarkar, J.; Bilisik, K.; Naebe, M. A Review on the Production Methods and Applications of Graphene-Based Materials. Nano-Materials 2021, 11, 2414. [Google Scholar] [CrossRef]
- Furuuchi, N.; Shrestha, R.; Yamashita, Y.; Hirao, T.; Ariga, K.; Shrestha, L. Self-Assembled Fullerene Crystals as Excellent Aromatic Vapor Sensors. Sensors 2019, 19, 267. [Google Scholar] [CrossRef] [Green Version]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type of Component | Advantages | Disadvantages |
|---|---|---|
| Paper-Thin Materials and Techniques for Them [8,10,11,12,13,14,15] |
|
|
| Liquid Crystal Polymers and Elastomers [16,17,18,19,20,46,47] |
|
|
| Artificial Skin and Fabrics [9,21,22,23,24,25,26,27,28,29,48] |
|
|
| Rigid Materials and Techniques for Variability [2,4,8,14,15,24,30,31,32] |
|
|
| Soft Robotic Grippers [4,15,33,34,35,36] |
|
|
| Soft Robotic Sensors [16,31,36,37,38,39,40,41,42] |
|
|
| Miscellaneous Techniques for Materials Used in Actuation [43,44,45] |
|
|
| Material | Diameter (nm) | Length (nm) | Young’s Modulus (GPa) | Tensile Strength (GPa) | Thermal Conductivity (W/mK) | Electrical Conductivity |
|---|---|---|---|---|---|---|
| Graphene [93,94,95,96,97] | 0.34 nm | — | 1000–1300 | 130 | 3000–5000 | Up to 108 S/m |
| Single-Wall Carbon Nanotubes [96,98] | 1–2 nm | 100–1000 mn | 100–1000 | 22.2 ± 2.2 | 3000–6000 | Up to 107 S/m |
| Multi-Walled Carbon Nanotube [98] | 5–100 nm | Up to 15,000 nm in length | 300–1000 | 11–63 | 2000–3000 | — |
| Fullerene (C60) [99,100] | 1.1 nm | — | 1.09 ± 0.08 | 45 ± 1.5 | 0.4 | — |
| Gold Nanoparticles [101,102,103,104] | 1–100 nm | — | 79 | 1.8 | 318 | 106 S/m |
| Silver Nanoparticles [90,104] | 1–100 m | — | 83 | 0.14 | 429 | 105 S/m |
| Type of Nano Component | Advantages | Disadvantages |
|---|---|---|
| Graphene [50,51,52,53,54,55,56,57,58,59,60,61,62,63,99,100] |
|
|
| Carbon Nanotubes (CNTs) [28,29,62,63,64,65,66,67,68,69,70,71,72,73,74] |
|
|
| Fullerene [21,75,76,77,78,79,80,81,82,83] |
|
|
| Gold Nanoparticles [102,103,104] |
|
|
| Silver Nanoparticles [90,104] |
|
|
| Molecular Motor [2,79,84,85,86,87,88] |
|
|
| Actuation Method | Advantages | Disadvantages |
|---|---|---|
| Pneumatic [1,2,4,13,33,35,48,65,105,106,107,108,111,112,113,114,115,116,117,118,119,120,121,122,123,124,125,126] |
|
|
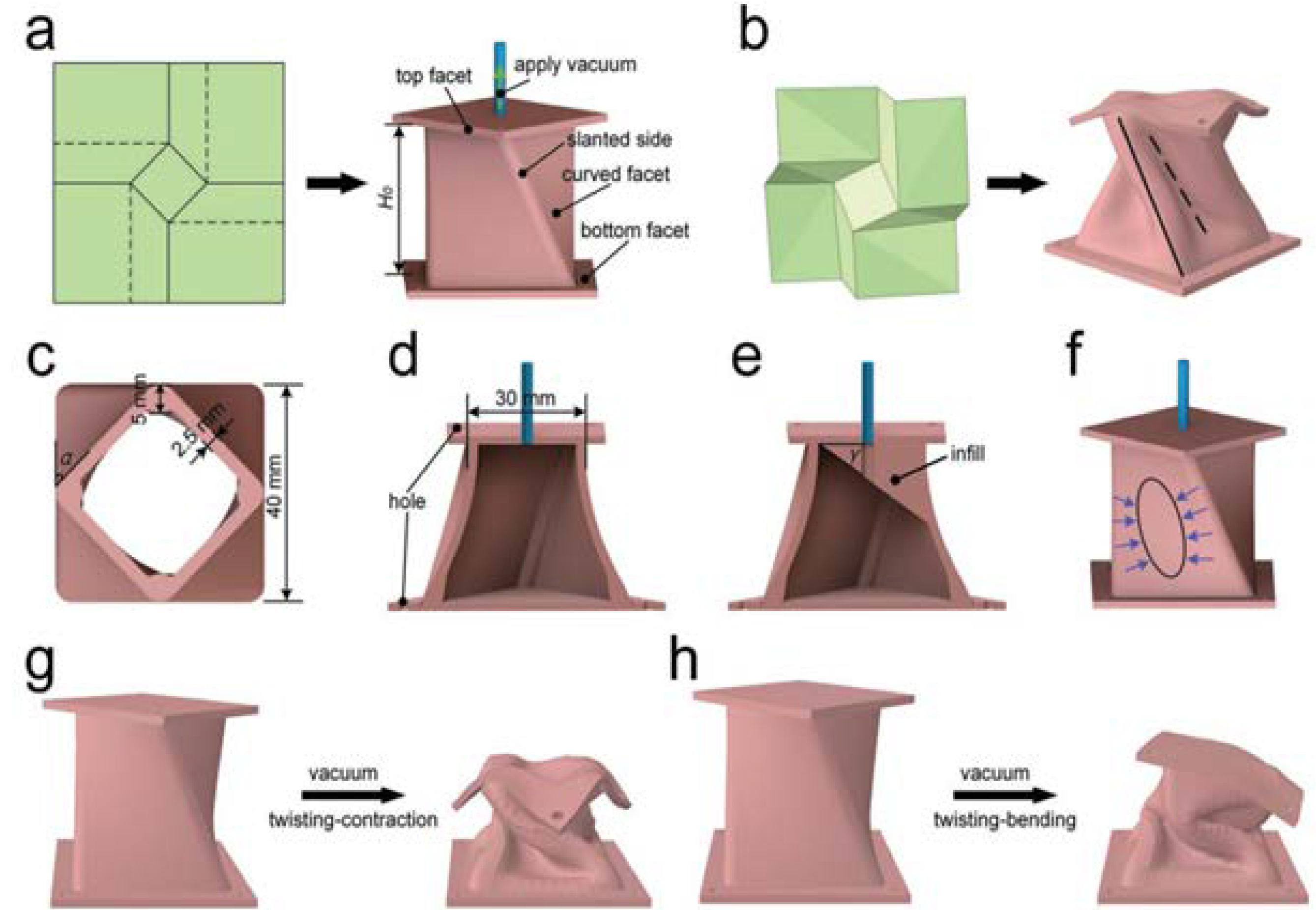
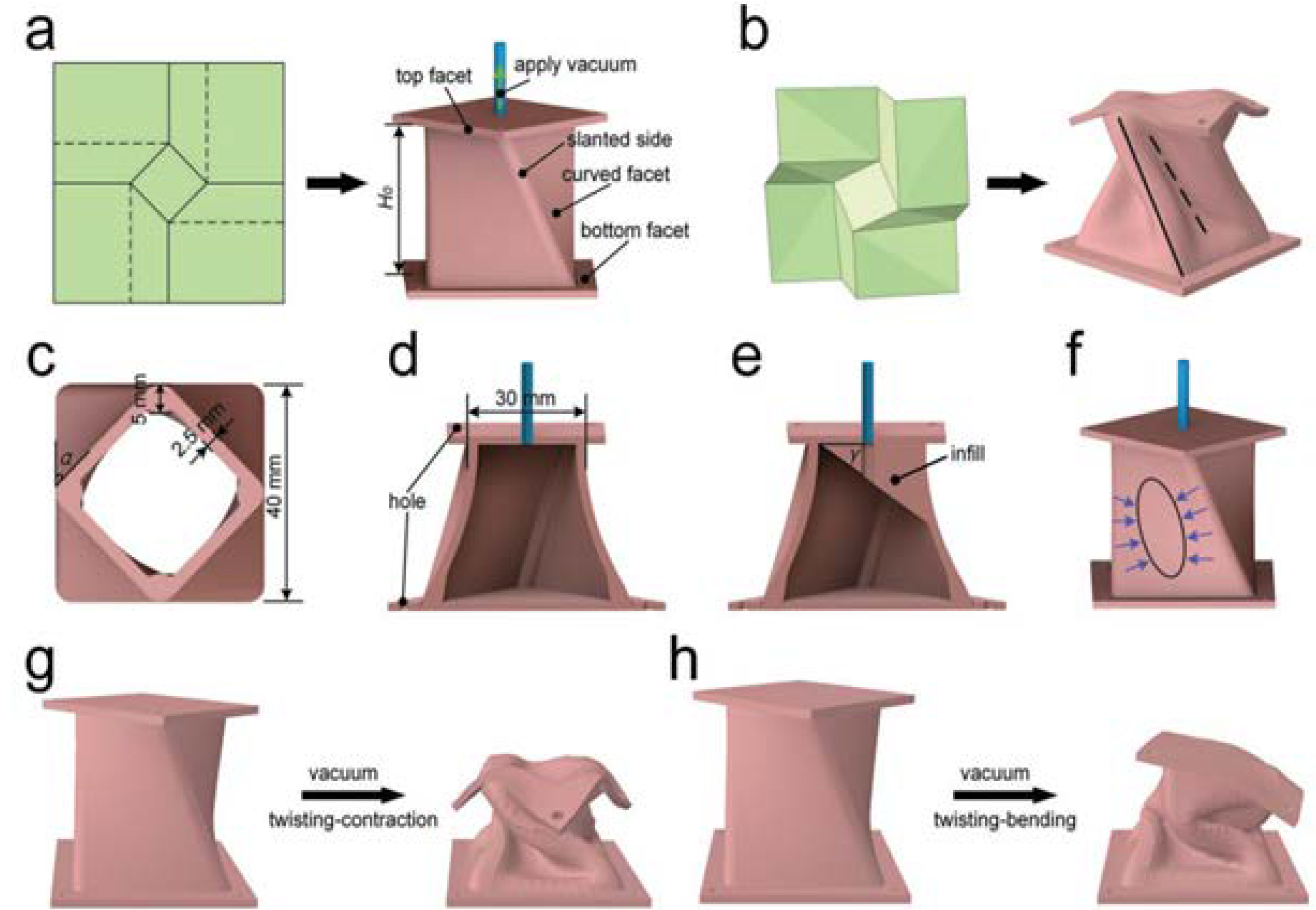
| Vacuum [61,121,143] |
|
|
| Hydraulic [34,88,128] |
|
|
| Twisted Fiber [11,26,27,28,29,39,120,128,129,130,131,132] |
|
|
| Shape Memory Polymers and Alloys [8,9,109,133,134,135] |
|
|
| Electroactive Materials [27,110,136,137,138] |
|
|
| Liquid Crystal Elastomer [18,139] |
|
|
| Fabrication Process | Simplified Explanation |
|---|---|
| Pneumatic [144,145] | K-PAM
|
| Hydraulic [146] | McKibben
|
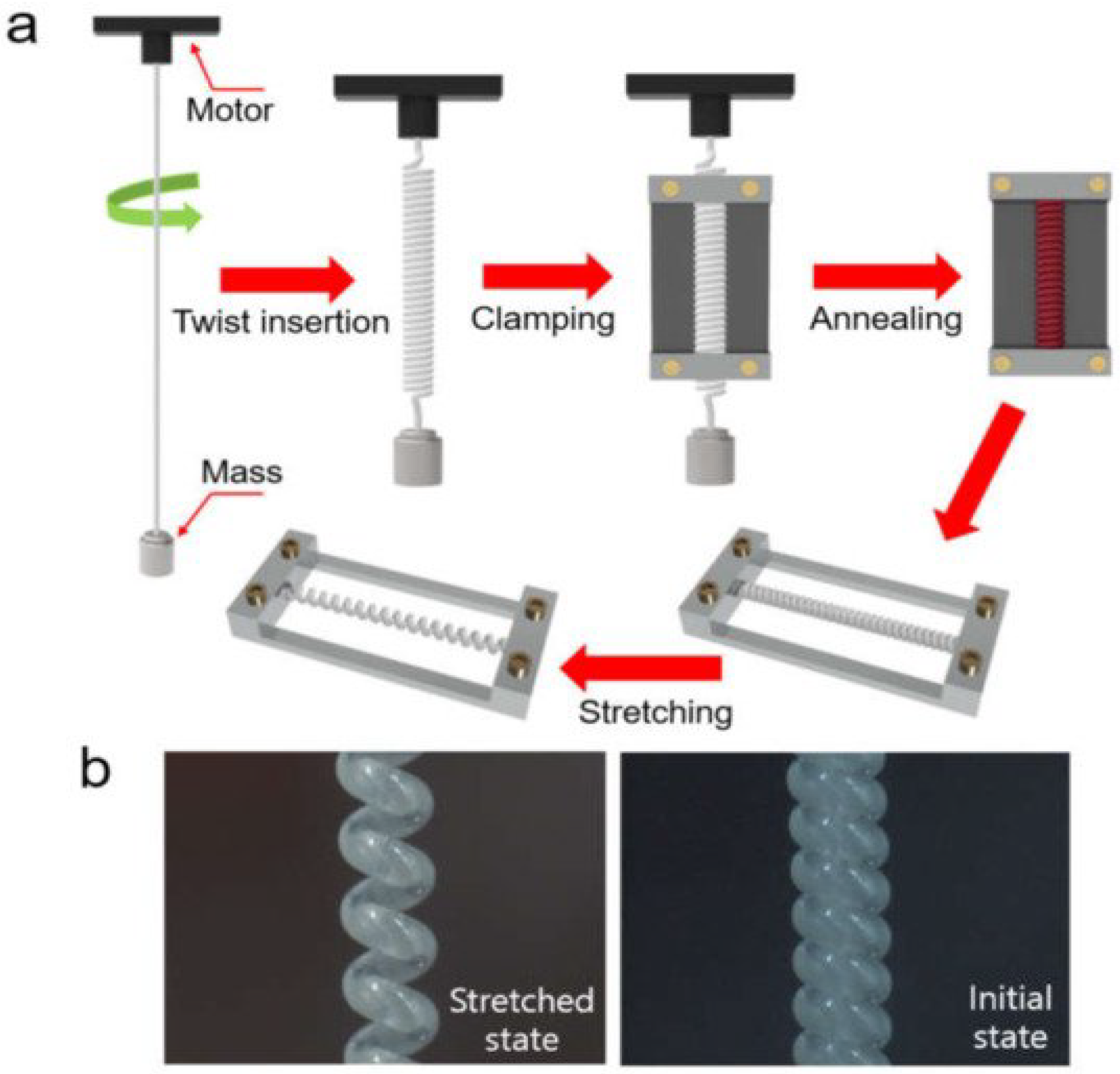
| Twist Fibers [26,147,148] | Sun et al., TCA Fabrication
|
| Ionic Polymers [149] | Impregnation electroplating
|
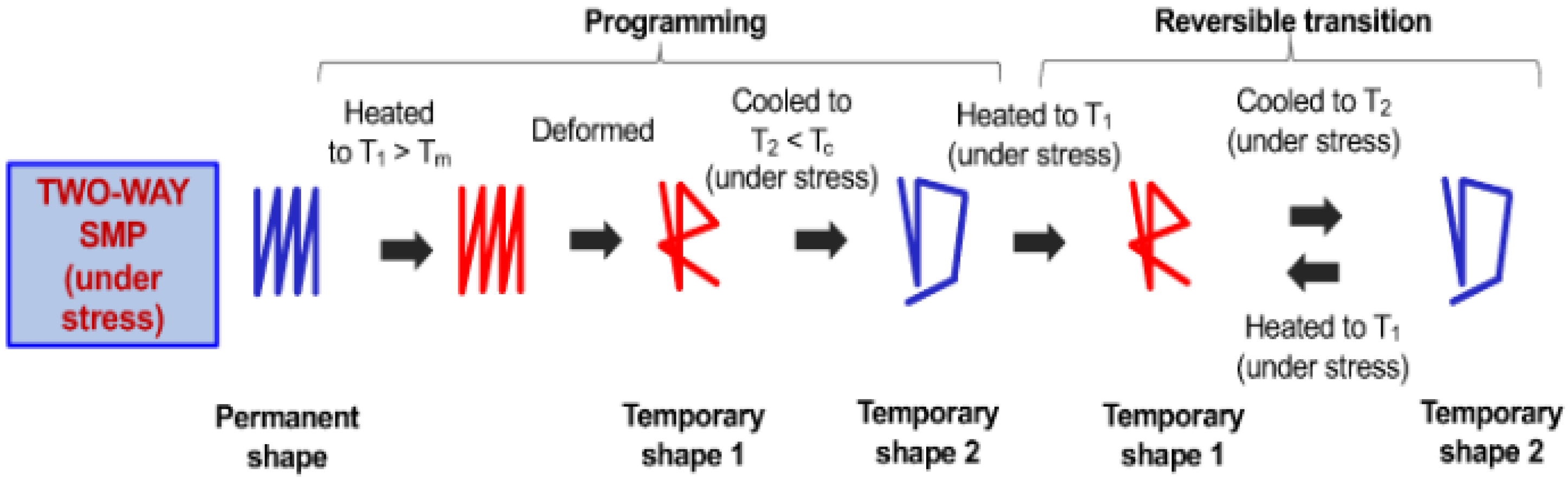
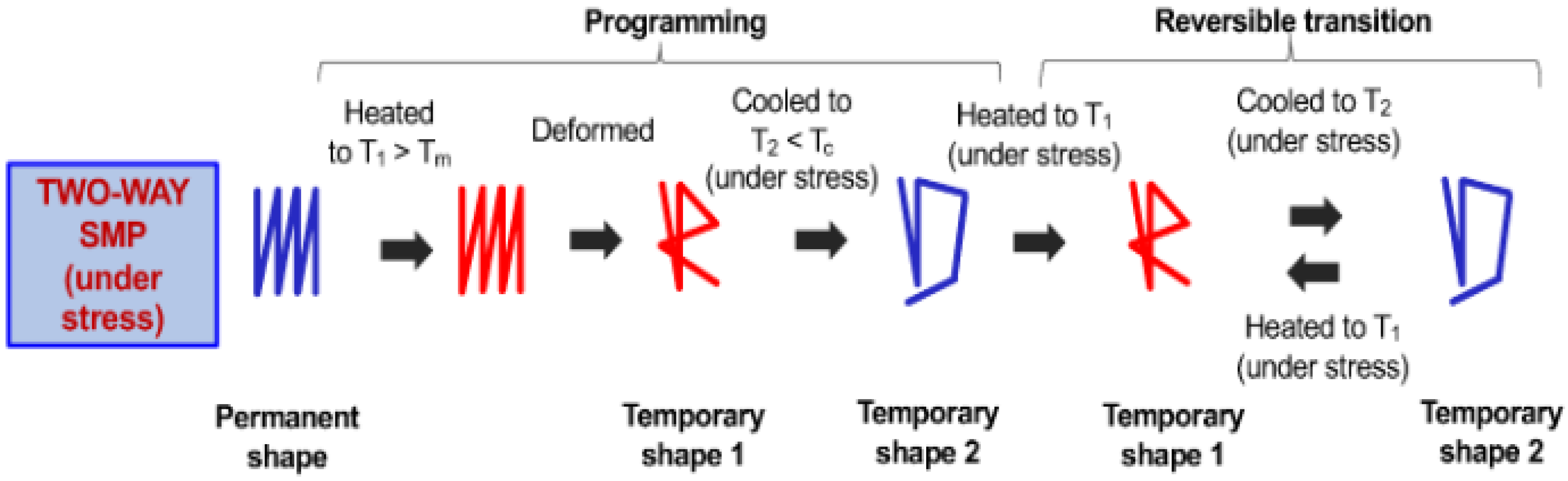
| Shape Memory Polymers [150,151] | Two-Way SMP (Under Stress)
|
| Shape Memory Alloys [152,153,154,155] | Powder metallurgy
|
| Dielectric Elastomer [156,157] | Brushing Method for Single-Layer DEA
|
| Liquid Crystal Elastomer [158,159] | Rubbing Overwriting
|
| Graphene [160,161] | Roll to Roll Milling
|
| Carbon Nanotubes [98] | Arc Discharge Technique
|
| Fullerene [146,162] | Liquid-to-Liquid Interfacial Precipitation Method
|
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Craddock, M.; Augustine, E.; Konerman, S.; Shin, M. Biorobotics: An Overview of Recent Innovations in Artificial Muscles. Actuators 2022, 11, 168. https://doi.org/10.3390/act11060168
Craddock M, Augustine E, Konerman S, Shin M. Biorobotics: An Overview of Recent Innovations in Artificial Muscles. Actuators. 2022; 11(6):168. https://doi.org/10.3390/act11060168
Chicago/Turabian StyleCraddock, Matthew, Emmanuel Augustine, Sam Konerman, and Minchul Shin. 2022. "Biorobotics: An Overview of Recent Innovations in Artificial Muscles" Actuators 11, no. 6: 168. https://doi.org/10.3390/act11060168
APA StyleCraddock, M., Augustine, E., Konerman, S., & Shin, M. (2022). Biorobotics: An Overview of Recent Innovations in Artificial Muscles. Actuators, 11(6), 168. https://doi.org/10.3390/act11060168