Once the final designs were obtained and the preliminary experimental validation was performed as described in the previous section, three sets of experiments were performed by employing the developed PMA devices. The first experiment, during which the device was fixed at its both ends, involved measurements of the maximum blocking forces at different positions within the working range and for different vacuum values. The second experiment was performed in a configuration, where the upper end of the bellow PMA was fixed, while the lower end with the load attached to its end, was left to move freely. This allowed the investigation of the time-dependence of the displacement for different values of vacuum and external loads. Finally, the third experiment was conducted by inducing sinusoidally forced motion so as to investigate the dynamical behavior of the devices as well as the influence of the repeatable movements on the structural and material properties of the developed muscles.
3.1. Experimental Assessment of Maximum Blocking Force
One of the important characteristics of a PMA device is the maximum force it can provide. This experimental investigation involves measuring the maximum blocking force for varying values of vacuum and different positions within the working displacement range. The actuators were placed on the testbench and fixed at their both ends. A load cell used for determining the force values was placed between the lower holder on the supporting structure and the actuator lower end. The experiments were performed for vacuum levels
p ranging from −0.1 to −0.7 bar with an increment of Δ
p = −0.1 bar and displacements with a step of Δ
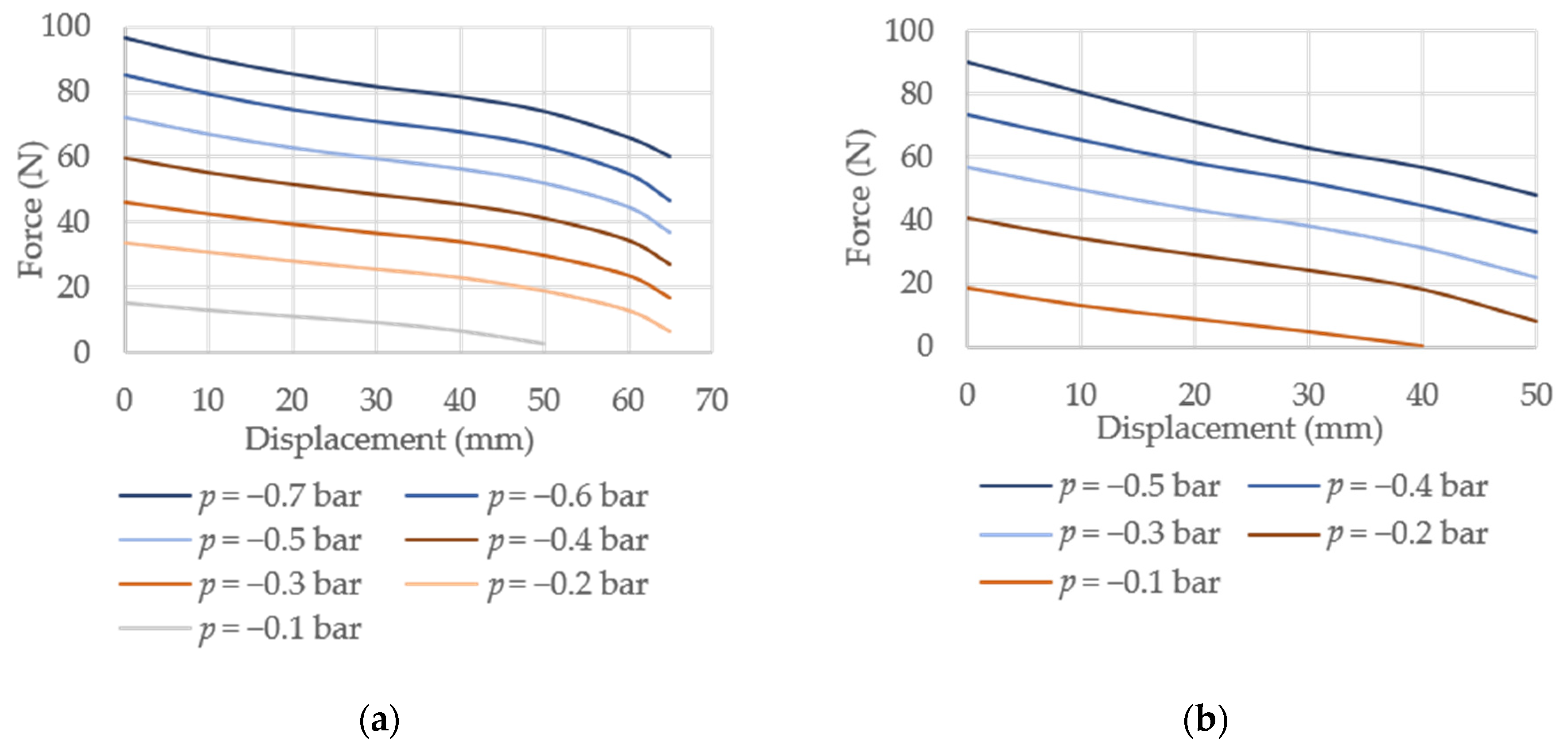
s = 10 mm, starting from the reference position. The reference position is the value of displacement for the unloaded actuator, i.e., the position with the maximum length between the lower- and upper-end lids of the actuator. The resulting curves, determined as an average of four repetitions of each measurement, are reported in
Figure 5.
As expected, a decrease in the force is observed for displacements farther from the reference position, for all values of the vacuum. Please note that there are two types of forces acting on the structure: (1) following from Pascal’s law, the vacuum acting on the surfaces of the lids provides a constant value of the force for all displacement values, and (2) the vacuum effect on the surfaces of the ribs results in additional vertical and horizontal force components. This means that with increasing the displacement (shortening the structure of the actuator), the angle of the ribs is decreasing and so is the vertical component of the force. That is, with the larger displacement from the initial position, the opposing force generated by the structure of the bellow itself is increasing, resulting in a lower net force.
Comparing the amplitudes of the blocking force of both actuators for the same corresponding vacuum values, it can be seen that the PMA2 provides a higher maximum force. This is an outcome of its larger dimensions. In fact, in comparison with the PMA1, the area of the end lids of the PMA2 is 18% larger, and the value of the maximum blocking force is hence increased by approximately 23%. The maximum blocking force of PMA1 measured at the reference position is
F = 96 N for the value of vacuum
p = −0.7 bar, while the maximum blocking force of PMA2 determined at the reference position is
F = 90 N for the value of vacuum
p = −0.5 bar. Please note that the maximum vacuum value of PMA2 is limited to a value of −0.5 bar due to the deforming effect that appeared in the preliminary experiments described in
Section 2.2.
From the resulting curves of the maximum blocking force it can be observed that the response of both devices is close to the linear behavior. In both cases, the largest deviation from the linear behavior occurs at the end of the displacement range. This follows from the fact that the ribs of the bellow and reinforcement rings come to a close contact as the actuator is reaching its maximum contraction. Overall, it is clear that the resistance force of the bellow has nonlinear characteristics, which affects the nonlinear dynamical behavior of this type of PMA. This effect is significantly seen in
Figure 5a for the 60–65 mm displacement range in the case of PMA1. Additionally, during the experiment at vacuum of
p = −0.1 bar, it was noticed that the blocking force was zero at displacements
s = 50 mm and
s = 40 mm for PMA1 and PMA2, respectively. This follows from the fact that at the low vacuum values, the resistance force of the bellow is greater than the actuator’s traction force itself.
3.2. Experimental Measurements of Displacement-Velocity Dependence
As opposed to the previously presented experiments, the experimental investigation presented in this section gives a little bit closer insight into the real working conditions under varying loading settings. The bellow pneumatic actuator was placed on the testbench in such a way that its upper end was fixed, while its lower end could move linearly. The experimental investigation was performed for vacuum values with an increment of Δp = −0.1 bar. All experimental investigations were conducted with the upper limit of vacuum set to a value of p = −0.7 bar for both actuators. Please note that the previously observed bending of the structure of PMA2 was prevented in this experiment by the fact that one of its ends could freely move, while the maximum external load was limited to 70 N.
The first set of tests was carried out without an external load—a minor resistance force caused by the returning spring in the potentiometric displacement sensor was neglected. The second experiment was performed for an external load of
F = 25 N followed by the load of 70 N. The results of displacement over time for different loading conditions for both PMAs are shown in
Figure 6.
From the results, it can be seen that there is a marked delay from the moment of activation of the actuator to the beginning of its displacement, for all vacuum values. This deadband is a result of time required to build-up vacuum in the system to a value which allows overcoming the resistance force of the actuator itself. As already pointed out, the vacuum was generated by a vacuum generator (ejector) and its alteration was achieved by altering the inlet value of pressure by a proportional-pressure regulator. The proportional-pressure regulator uses the principle of decreasing the flow area of the regulator to decrease the value of pressure, which directly affects the time required to achieve the needed value of vacuum. This is especially evident for the low vacuum set points. Moreover, the effect of air flow damping influences the time needed to achieve the maximum displacement of the actuators. This is particularly seen at the low vacuum value of −0.1 bar, where the maximum displacement of 30 mm was achieved in 30 s. The achieved maximum displacement for each actuator is the result of the vacuum value which acts on the end lids and the bellow ribs while generating the force opposing the direction of the load and bellow resistance force.
No-load experiments (
Figure 6a) resulted in a maximum displacement of 68 mm for PMA1 and 55 mm for PMA2, both at the vacuum value of
p = −0.7 bar. Considering the initial lengths of 160 and 140 mm for PMA1 and PMA2, respectively, the contraction ratio can be calculated dividing the measured maximum displacement by the initial actuator’s length. This calculation resulted in
ε = 42.5% for PMA1 and
ε = 40% for PMA2. It has to be noted here that the contraction ratio can be increased in the design phase by further reduction of the thickness of the inner rings and by increasing the distance between bellow ribs.
In contrast to the conditions without load, in the experiment with the 25 N load (
Figure 6b) the lowest value of vacuum at which the actuator was able to perform movement was
p = −0.2 bar. The deadband from the activation of the actuator to the beginning of its displacement was also present and was approximately the same as in the no-load conditions. Similar dynamical behavior can be observed with respect to the previous experiment, but the external load now limits further the maximum displacement, which is more noticeable at lower vacuum values. Both actuators achieved the maximum displacement at the vacuum value of
p = −0.7 bar, which was 66 mm for PMA1 and 53 mm for PMA2, resulting in slightly lower contraction ratios, namely,
ε = 41.3% for PMA1 and
ε = 37.8% for PMA2.
Finally, with the 70 N loading setting (
Figure 6c), PMA1 was not able to overcome the load for vacuum amplitudes lower than
p = −0.5 bar and PMA 2 for amplitudes lower than
p = −0.4 bar. During the experiment for vacuum value
p = −0.7 bar, the bending of ribs appeared again, but did not permanently damage the actuator. From the results, it can be seen that a much longer deadband from the activation of the actuator to the beginning of its displacement is present, which is a result of the higher value of the load. Additionally, from the results, it can be noticed that more time is necessary to achieve a maximum value of displacement, especially for PMA1. The maximum value of displacement is much lower than in the previous experiments with a lower value of the external load. Both actuators achieved the maximum displacement at the vacuum value of
p = −0.7 bar, which was 40 mm for PMA1 and 38 mm for PMA2, resulting in contraction ratios,
ε = 25% for PMA1 and
ε = 27% for the PMA2. From the results of the contraction ratios, it can be concluded that PMA1 achieved lower values than PMA2, which was not the case in previous experiments. The reason for that is the high value of load and lower dimensions of PMA1 in comparison to PMA2.
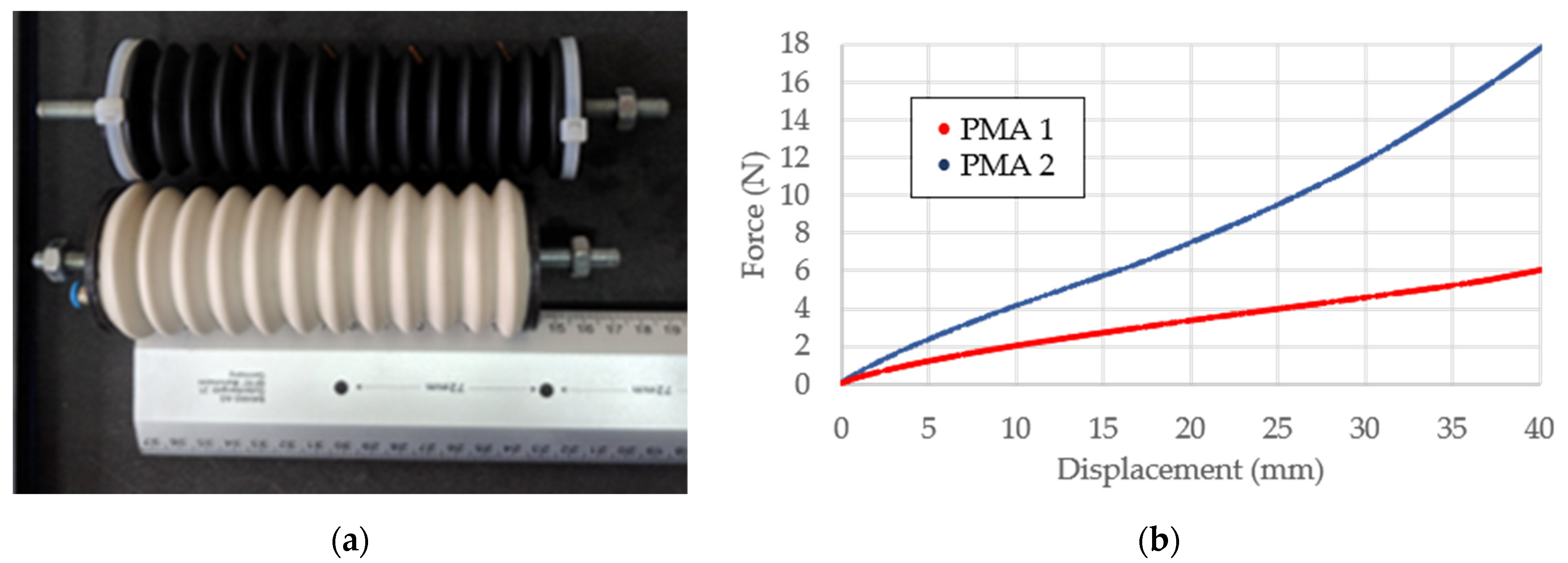
The above-described experiments allowed calculation of the time constants for different loading conditions. Time constants in this case represent the time from the beginning of actuation to the moment when the actuators achieve 63.2% of the target value. From the data shown in
Table 2, as expected, it can be seen that with the increase in the vacuum amplitudes, the value of the time constant decreases, i.e., the response of the actuator becomes faster. What is more, it can be observed that the dynamical response of the PMA2 is slightly better for all values of vacuum. Additionally, compared with the results from
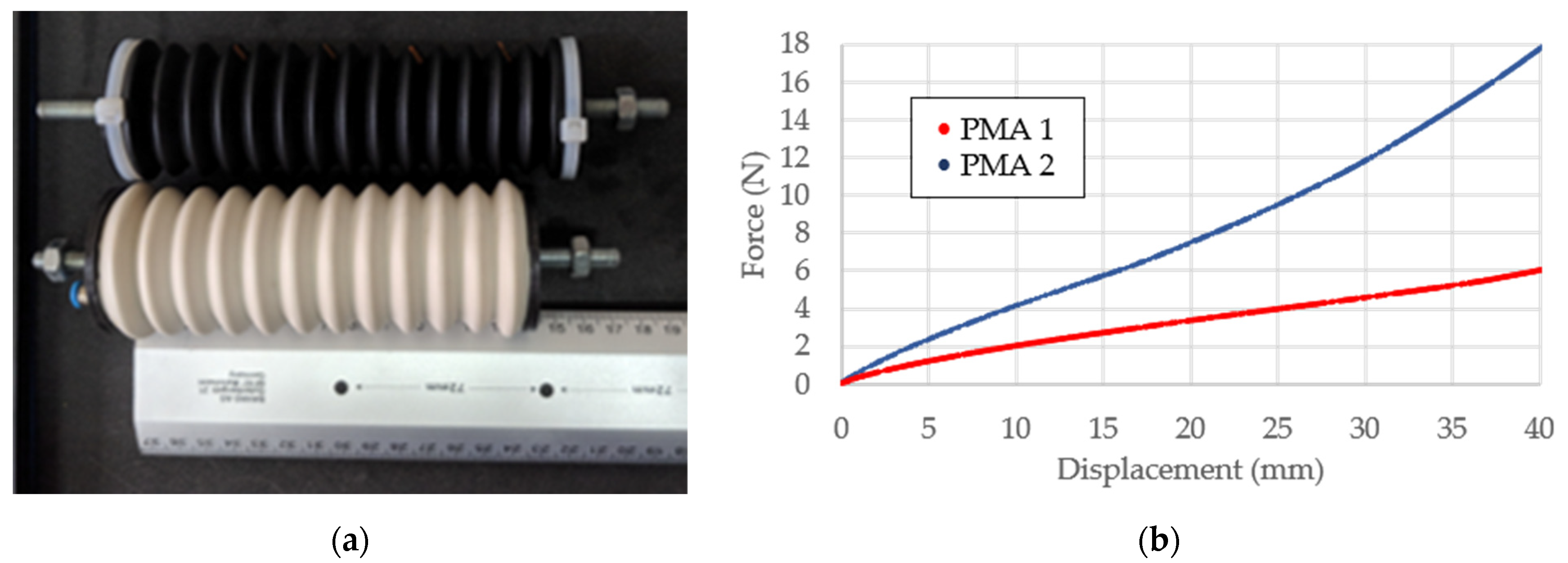
Figure 2b, it can be noticed that a higher stiffness of the PMA2 bellow results in lower time constant values.
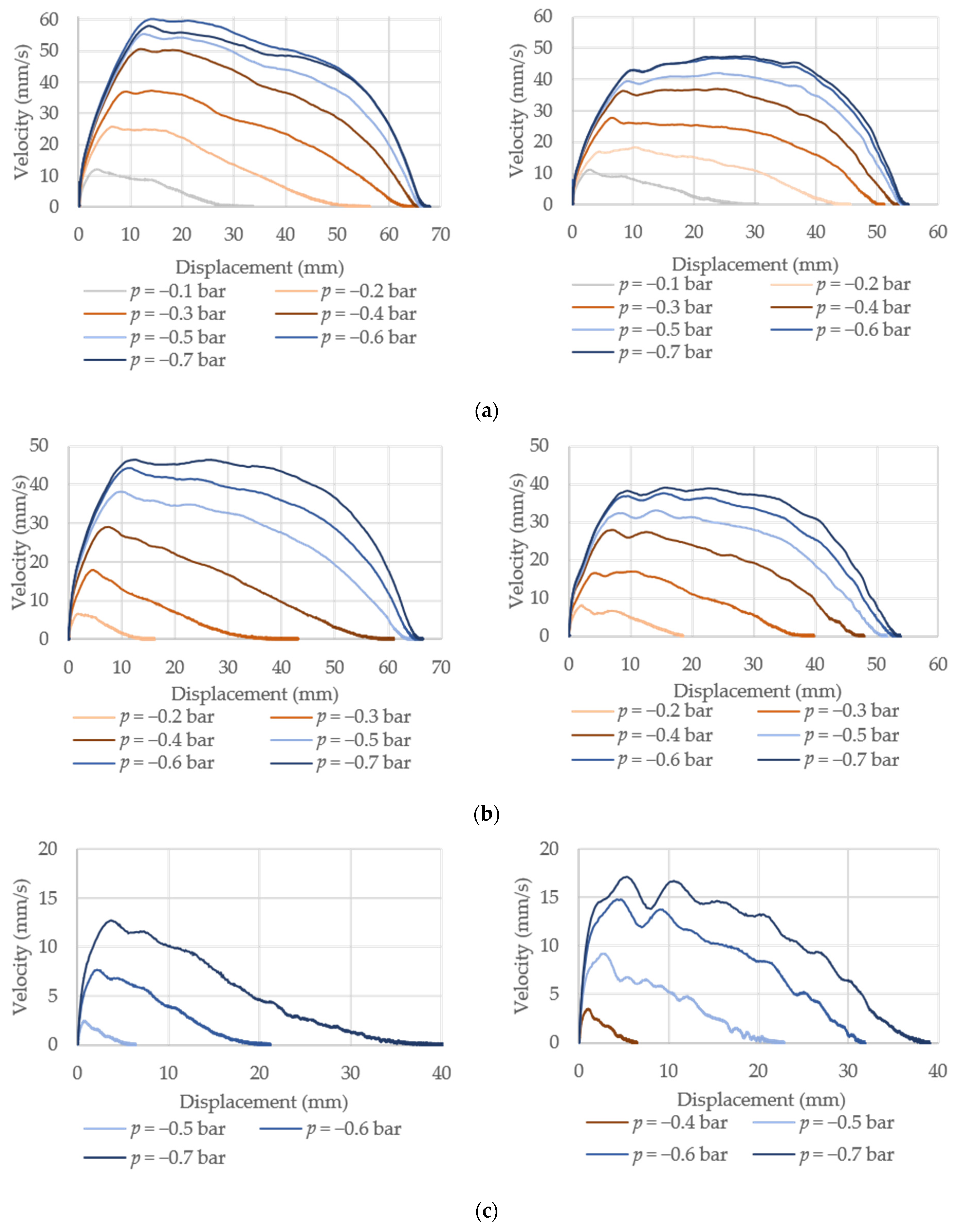
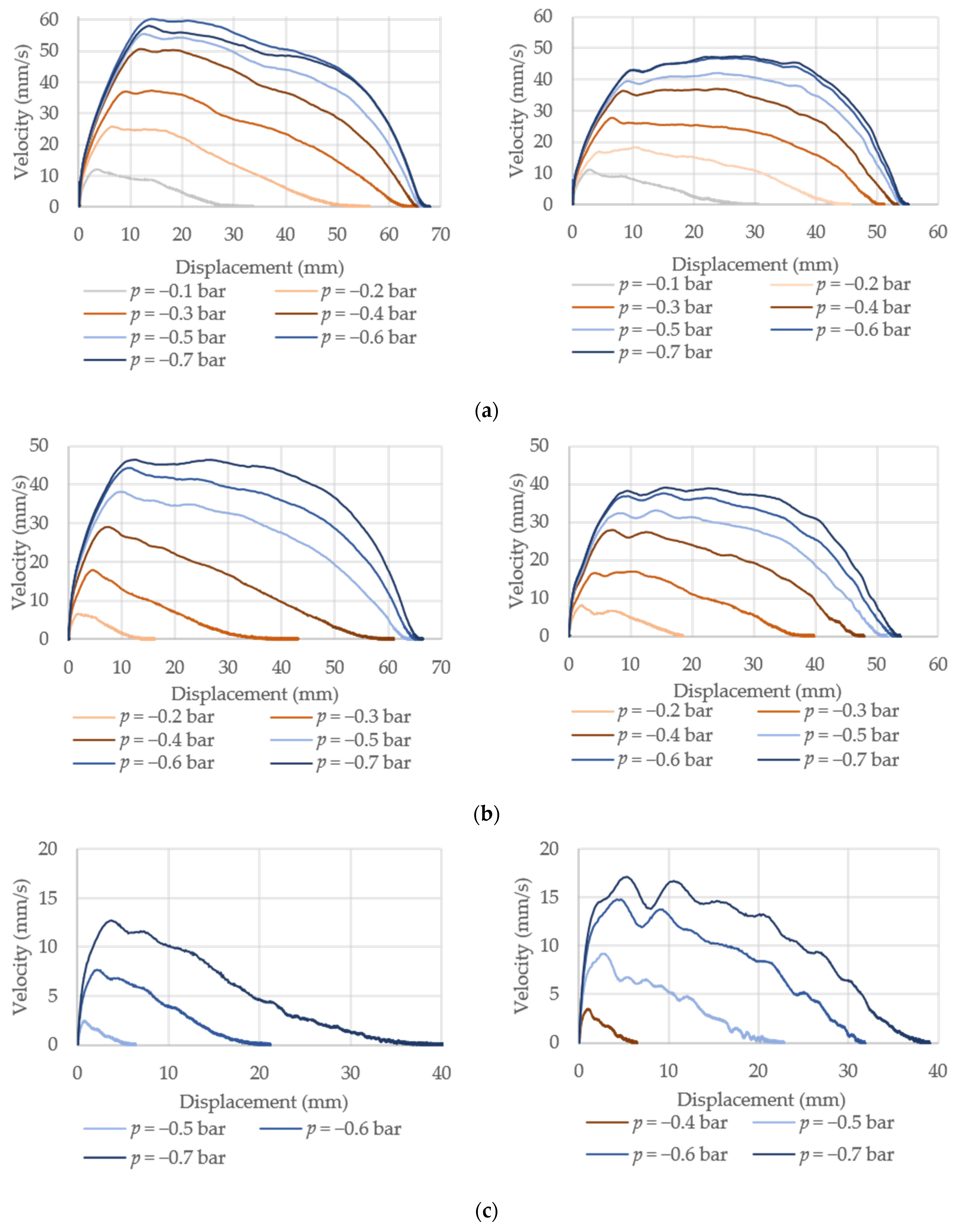
The open-loop velocity-displacement responses are recorded next as shown in
Figure 7. From the results, it can be observed that for all vacuum values, both actuators reached their maximum velocities rapidly and then the velocity started decreasing as the actuator was reaching its maximum displacement.
Due to the fact that the velocity of the actuator is a function of the input flow, it can be noticed that at a lower value of pressure/vacuum, a lower maximum velocity is achieved. For PMA1 at a vacuum value of
p = −0.7 bar, a maximum velocity
v = 60 mm/s was achieved at displacement of 14 mm from the reference position, i.e., at 20% of its maximum displacement. For PMA2 at a vacuum value of
p = −0.7 bar, a maximum velocity
v = 47 mm/s was achieved at the displacement 28 mm away from the reference position, i.e., at 50% of its maximum displacement. Comparing the obtained results of the actuator velocity over displacement, it can be concluded that the actuators have slightly different dynamical characteristics as a result of the different dimensions and stiffness of the bellow material (see
Figure 2b). The PMA2 reached the lower maximum velocity due to larger dimensions, and it achieved the maximum velocity at 50% of actuator’s maximum displacement as a result of the higher stiffness of the bellow material. By comparing the results of the velocity for different loading conditions, as expected, a decreasing trend of the velocity values can be observed with the increase in the load. In all cases PMA1 is able to achieve higher velocities through the whole displacement range in comparison to PMA2. Also, from the resulting velocity-displacement curves, a marked oscillatory behavior of the velocity can be observed, especially for higher loading conditions. Comparing the results of velocity for external loads of
F = 0 N,
F = 25 N and
F = 70 N, it can be concluded that for higher values of loads, the velocity starts rapidly decreasing after reaching the maximum value. In the case of PMA1, decreasing of the velocity is smooth, while for PMA2, decreasing of the velocity shows oscillatory behavior. Based on the previous assumptions, it can be concluded that oscillatory velocity appeared after overcoming the inertial acceleration of the load, which resulted in a drop in velocity.
3.3. Experimental Results for Sinusoidally Forced Motion
Additional experiments were performed by exciting the system with a sinusoidal signal with the aim of investigating changes in the structural properties of the actuators due to the fatigue, creep and relaxation of material. By using the LabVIEW platform, a graphical interface was developed to generate a sinusoidal vacuum excitation signal with peak-to-peak amplitude of
p = −0.5 bar and frequency
f = 0.4 Hz. Each actuator was loaded with
F = 25 N and subjected to a 10 min oscillatory motion. Within each period of the sine signal (
T = 2.5 s), both actuators were moved from the initial position to a maximum achievable displacement and back to the reference position. The results of the displacement over time are shown in
Figure 8. In the first 30 s of the experiment, the maximum value of displacement slightly increased and then remained constant until
t = 350 s for PMA1 and
t = 250 s for PMA2. Then, the displacement slightly increased (Δ
s ~ 1 mm) due to the inner heating of the material. Since bellow pneumatic actuators are soft actuators, such changes are certainly expected; however, these effects are not significant. Moreover, they can be relatively easily compensated for by appropriate feedback positioning control algorithms, as it will be briefly demonstrated in
Section 3.4. Finally, and most importantly, fatigue, creep or relaxation of material were not observed.
3.4. Position Control of Developed Actuators
In this section, we finally demonstrate the precision positioning capabilities of the developed actuators. One of the demands in the majority of real-life mechatronics systems is the possibility of precision positioning with fast response time, over the whole working range of the system. In general, only closed-loop control systems can allow such properties, especially in the presence of external disturbances. In this work, we use two different control approaches for position control: a simple proportional-derivative controller (PID) and more complex linear quadratic regulator (LQR) [
25,
26].
First, the LabVIEW programming environment was used to develop and tune the PID controllers. The parameters of the controllers were tuned by using the Ziegler-Nichols method, which gave their rough estimation, and then fine-tuned by the trial and error procedure. Since the parameters for both actuators were very similar, the average values for both types were finally adopted. After a couple of tries with different combinations of PID terms, it was experimentally determined that for
KP = 0.155,
KI = 900 and
KD = 60, the optimal responses were obtained. Obtained parameters were then used to perform point-to-point positioning experiments with setpoints spanning from 10 to 50 mm with a 10 mm increment. The examples of the achieved results for 20 and 40 mm references for both muscles are shown in
Figure 9 (blue line). It was shown that a small steady state error of less than 0.2 mm is present within the whole working range for both devices. Furthermore, it was shown that there is no overshoot for the points that are up to 20 mm away from the reference position, while for the larger references, the overshoot value tends to increase.
With the aim of decreasing the overshoot, which appeared to be up to 10% for the highest references in the case of the previously described PID, the LQR controller was developed in the following step. Since a linear quadratic regulator represents a model-based control approach, in order to apply this type of control, it was first necessary to develop the models of each system. A data-driven approach is, therefore, used where each muscle was excited by using a random input signal in a form of Gaussian white noise with the amplitude in 0 to 10 V range, i.e., within the input voltage range of the used proportional valves. Measurements were repeated several times for each actuator and the Matlab identification toolbox was employed to derive the state-space representations. Both devices are represented as second-order systems. In order to find a stabilizing solution for each system and to solve the Riccati’s equation, which gives the vector with optimal LQR gains
K, the idare Matlab function was used. The state matrix
Q and input matrix
R are determined by the trial-and-error procedure. Therefore, those variables were altered through many iterations until an acceptable system behavior was achieved. The final vector with gains was determined to be
K = [−25,079 × 10
3 33,156 × 10
3] for both devices. Considering that the LQR algorithm does not have the ability to eliminate the steady-state error, a pregain
G that multiplies the state variable only is additionally used. During the experiments, it was concluded that the value of the pregain is position-dependent, and it was interpolated by using a second-order curve:
The results of the positioning performances by employing the developed LQR controller for both versions of the actuators are depicted in
Figure 9 (red lines) and compared with the previously used PID approach (blue lines).
It can be seen that the LQR approach allows achieving very small overshoot within the whole working range. Moreover, it can be observed that the steady-state error is very small and comparable to the case of PID control. The rise time parameter shows that the dynamics of the system is largely improved for smaller set points, while the same parameter is similar for higher references. On the other hand, it can be noticed that the settling time is also improved within the whole working range with respect to the PID approach.
The final step comprises analysis of the no-load settling time
τs and rising time
τr for both PMA versions (
Table 3). The rise time is the time required for the PMA increase from 10% to 90% of the displacement setpoint, while the settling time is measured when the process value entered within ±2% of the target value. The results show, again, that in the whole reachable range of both devices, the LQR controller gives faster response with respect to the PID. The settling and rise time constants are increased with larger displacements, except in the case of the PID controller for a setpoint of 10 mm, where the largest values of these parameters are observed.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
