1. Introduction
Micro/nano-manipulation robots are a significant application of robotic automation technology at the micro/nano meter scale. Such robots are extensively used in biomedical engineering, precision engineering, and advanced optics to complete micromanipulation and microassembly tasks [
1]. As a micromanipulation end-effector, the microgripper plays a crucial role in grasping and releasing objects [
2]. Various types of actuators, e.g., electrostatic, electrothermal, electromagnetic, piezoelectric, and shape memory alloy (SMA) [
3,
4], have been introduced for microgrippers. The piezoelectric-actuated microgripper has been widely studied and adopted owing to its small footprint size, high displacement resolution, fast response speed, and large output force. The compliant mechanism is typically used as a displacement amplification and transmission mechanism between the piezoelectric actuator (PEA) and the microgripper jaw by virtue of being free of friction, free of lubrication, vacuum compatibility, and ultrahigh-resolution of motion [
5,
6].
As PEA’s output displacement is extremely short (about 0.1% of PEA length), a popular design goal of the piezoelectric-actuated microgripper is to achieve a large gripping range. When the jaw gap is determined, a large gripping stroke can improve the clamp’s adaptability to grasp the targets of different sizes. To obtain a large gripping stroke, researchers have applied different types of compliant amplification mechanisms to design micromanipulators, such as lever mechanisms and bridge mechanisms [
7,
8,
9]. In addition, high natural frequency is another goal to be pursued by the microgripper. A high natural frequency is capable of broadening control bandwidth to promote the performance of the control system [
10]. Meanwhile, the high-frequency vibration of a gripper is helpful to overcome the adhesion between the cells and jaws in biological field [
11]. Hence, a practical microgripper demands a large gripping stroke and a high natural frequency at the same time.
Previous studies have introduced plentiful types of compliant microgrippers based on the piezoelectric actuator [
12,
13,
14,
15,
16,
17,
18,
19,
20,
21,
22,
23,
24,
25,
26,
27,
28]. For example, the pseudo-rigid-body model (PRBM) and finite element analysis (FEA) techniques were combined to develop multiple microgrippers with a gripping range of about 100
m in [
14]. To expand the gripping range, the lever mechanism, Scott–Russell (SR) mechanism, and parallelogram mechanism were integrated into a gripper design for generating a gripping stroke of 1000
m [
15]. Furthermore, the SR mechanism was improved in [
16] to obtain a large displacement magnification. The gripping stroke of the designed microgripper is over 720
m. However, a common shortcoming of the aforementioned microgrippers is the relatively low natural frequency (i.e., 70 Hz and 70.7 Hz, respectively) and massive structure. Later, the lever, bridge, and parallelogram mechanisms were integrated in a symmetrical microgripper, which obtained a natural frequency of 1044 Hz [
17]. Such a value of natural frequency is much higher than those of the previously designed microgrippers. However, the gripping displacement of the microgripper is only 93.52
m. Another microgripper was presented in [
18] with a resonant frequency of 854 Hz and a gripping range of 184.04
m. Up to now, few piezoelectric-actuated microgrippers with the above two merits have been reported. It is necessary to design a piezoelectric-actuated microgripper with a large gripping range and high natural frequency to satisfy the increasing demands of applications.
The main contribution of this paper is the design of a new piezoelectric-actuated microgripper dedicated to micromanipulation application. As compared with previous work, it is characterized by a large gripping stroke and high natural frequency for achieving high-speed manipulation of micro-objects. The microgripper consists of a piezoelectric actuator, a three-stage compliant amplification and guiding mechanism, and two jaws. The computational simulations based on response surface analysis and finite element analysis have been carried out to determine the vital structural parameters and to verify the working performance. The gripping stroke, gripping force, natural frequency, tracking ability, and motion resolution of the microgripper were tested by open-loop and closed-loop experiments. The gripping experiments on metal micro-wire and micro-shim further demonstrated its gripping ability.
The following sections of the paper are organized as follows. The mechanism design and analytical modeling of the microgripper are presented in
Section 2. Response surface analysis and simulation study with FEA are conducted in
Section 3. Prototype fabrication and open-loop experimental results are given in
Section 4. An experimental study with closed-loop position/force control is performed in
Section 5 along with performance discussion.
Section 6 concludes this paper.
4. Prototype Fabrication and Experimental Tests
This section presents the prototype fabrication and experimental tests of the microgripper. The gripper performances in terms of output displacement, natural frequency, and gripping force were experimentally tested in experiments.
4.1. Prototype Fabrication and Experimental Setup
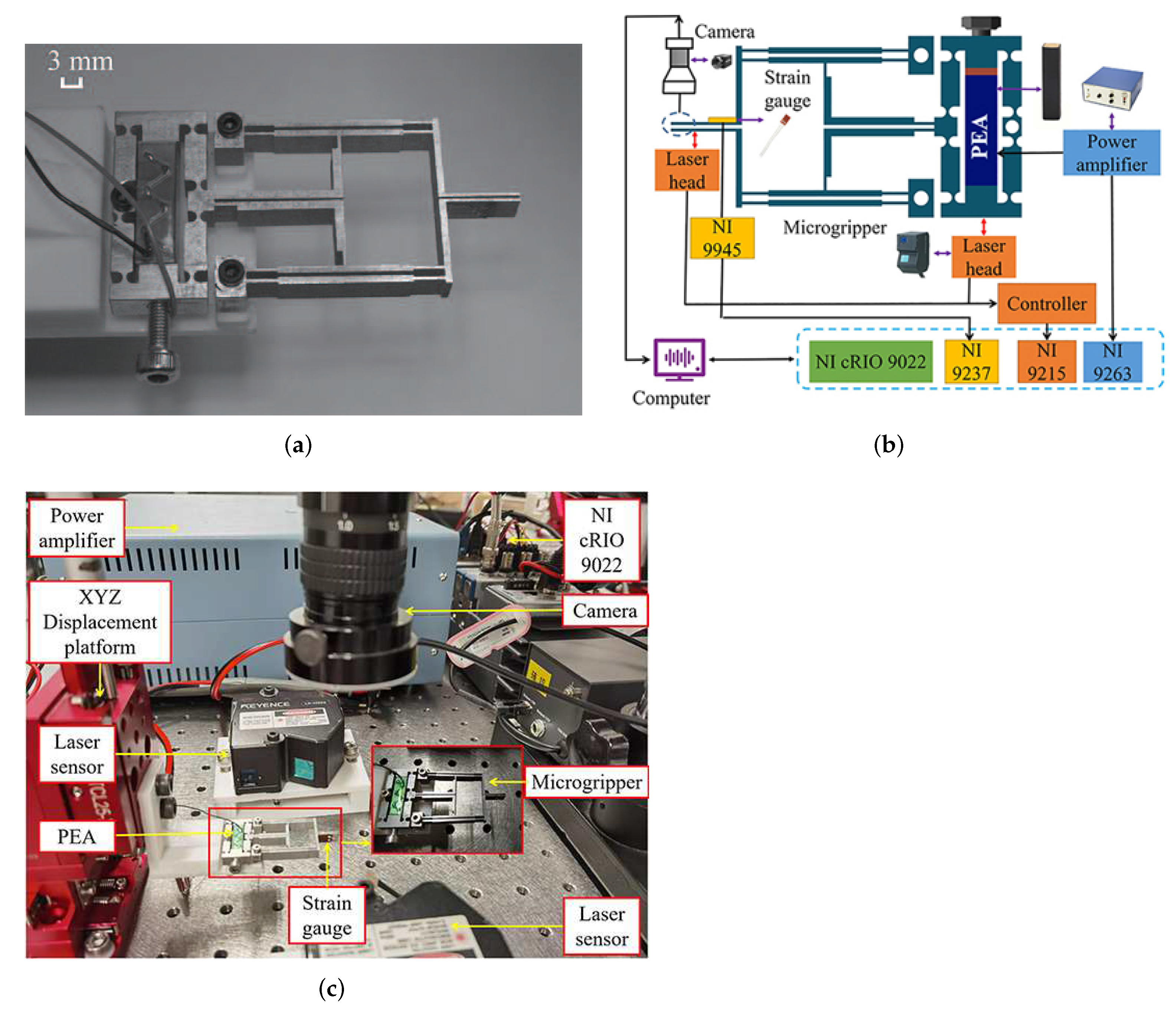
The wire electric-discharge machining (WEDM) technology was adopted to manufacture the designed gripper with the Al-7075 alloy material. The material has good performance with modular elasticity of 71 GPa, Poisson’s ratio of 0.33, density of 2810 kg/m
, and yield strength of 524 MPa. The fabricated microgripper is compact, as shown in
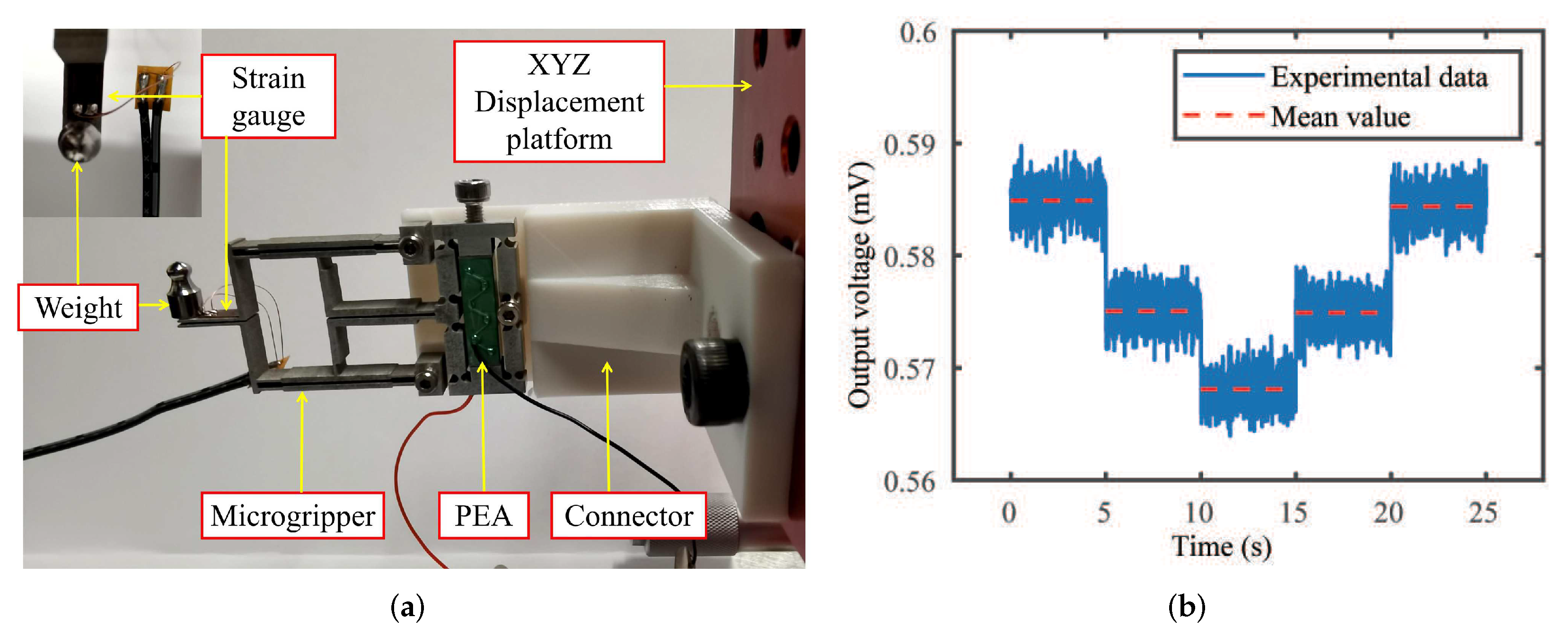
Figure 9a. To verify the characteristics of the clamp, an experimental setup was constructed as shown in
Figure 9b,c.
First, the microgripper was fixed onto an XYZ translational stage (model: HTML25-NS, from Hangzhou SPL Photonics Co., Ltd. (Hangzhou, China) via a connector to realize a three-axis precision movement. Two laser displacement sensors (model: LK-H055, from Keyence Corp. (Osaka, Japan) with a measurement range of ±10 mm were mounted on two sides of the gripper to measure the input end and output displacements, respectively. To measure the gripping force, a strain gauge (model: BFH 350-3AA, from Chengtec Electronics Ltd. (Shanghai, China)) with a sensitivity factor of 2.0 was pasted on the microgripper’s jaw side, and its output signal was conditioned by a quarter Wheatstone bridge circuit. A voltage amplifier (model: EPA-104, from Piezo Systems, Inc. (Cambridge, MA, USA)) was used to drive the PEA with a voltage range of 0–150 V. The industrial camera (model: TD-UV20S, from Sanqtid Co. (Shenzhen, China)) was installed above the microgripper’s jaws to observe and record the gripping process. The signal driving, data acquisition, and signal processing functions of the experimental system were realized by a real-time controller (model: NI cRIO 9022, from National Instruments Corp. (Austin, TX, USA)) with analog input and output modules. The entire experimental setup was mounted on a vibration isolation table (model: RS2000, from Newport Corp. (Irvine, CA, USA)).
4.2. Open-Loop Test of the Microgripper Displacement
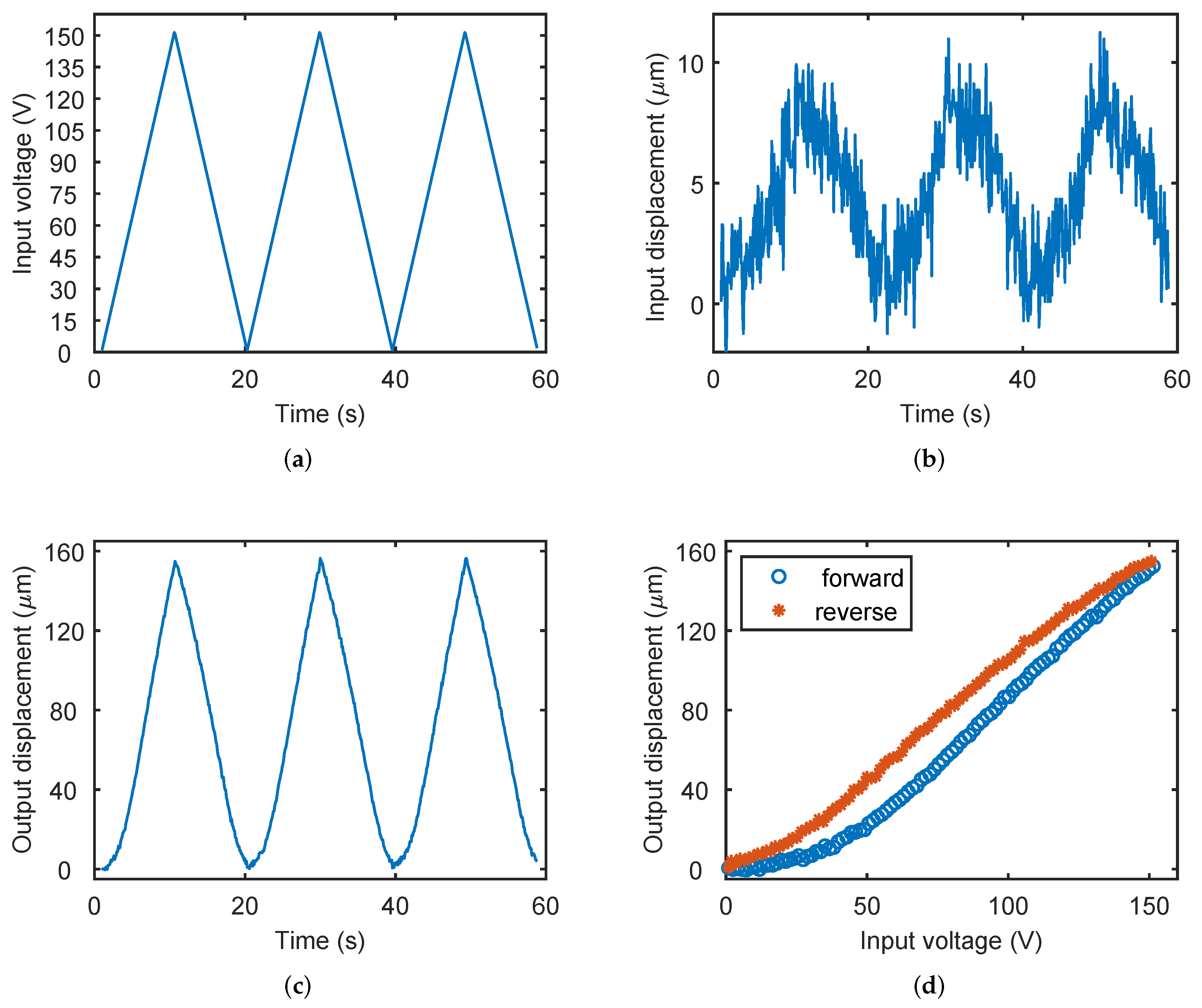
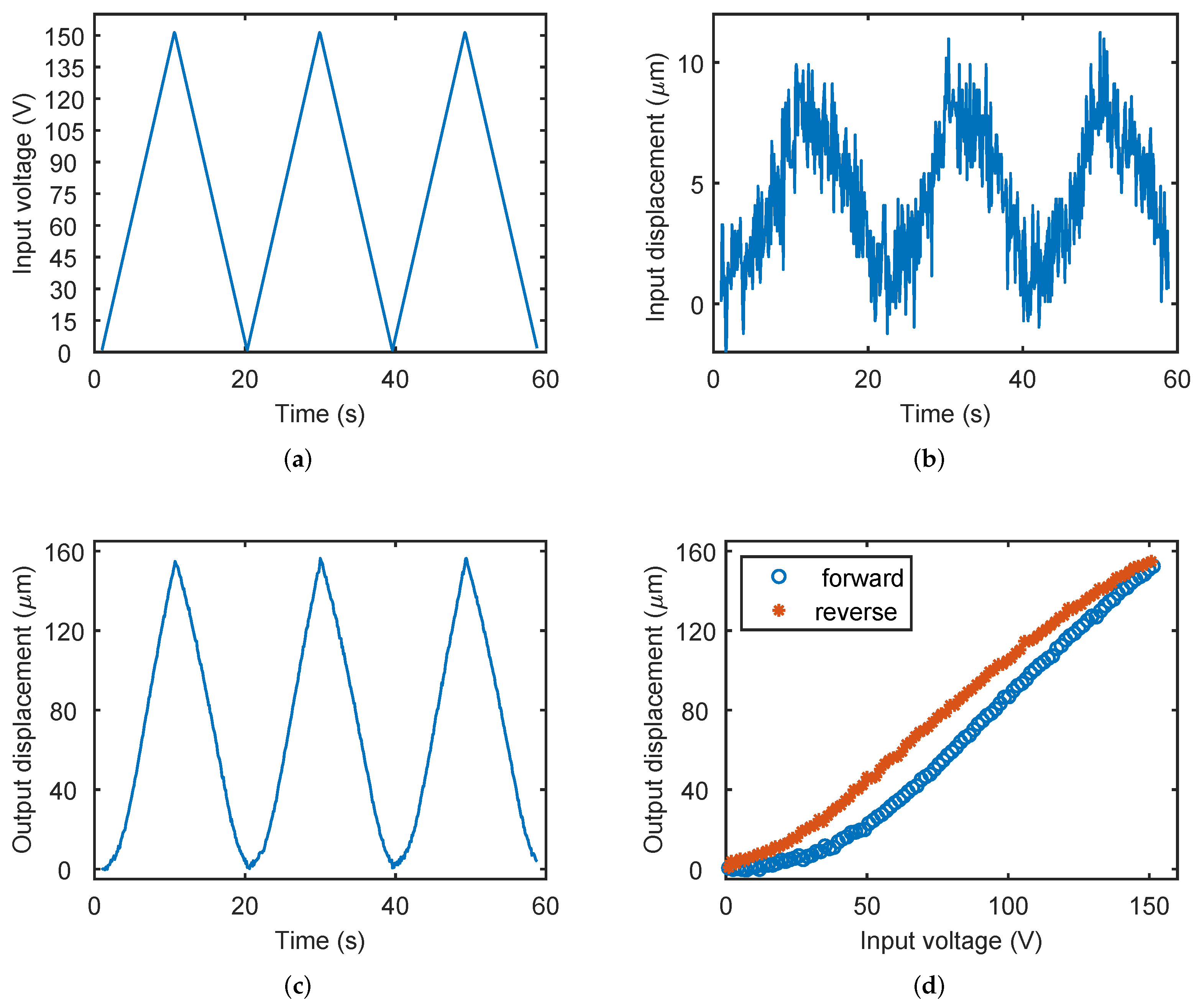
In the open-loop experiment of displacement test, the PEA’s driving voltage linearly increases and decreases in the range of 0–150 V. The experiments were repeated three times to examine the repeatability and hysteresis of the gripper.
The output voltage, input displacement, and output displacement of the gripper during the experiment are shown in
Figure 10. It can be observed that when the input voltage is 150 V, the microgripper’s unilateral output displacement is about 156.4
m.
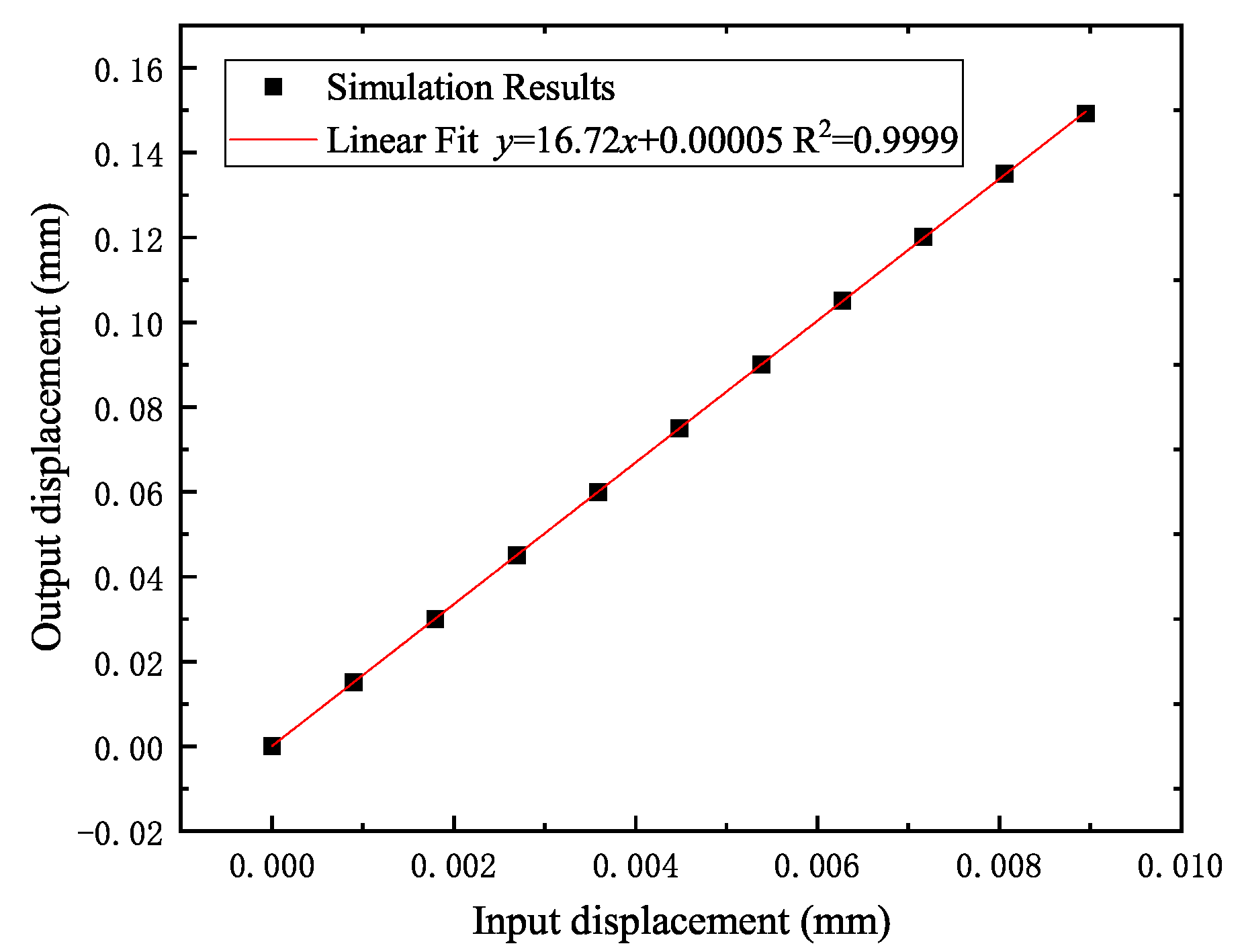
Figure 10b shows that the input displacement signal contains relatively large noise due to the small ratio of the input displacement to the input voltage. The experimental result of the output displacement of two jaws is nearly 312.8
m with displacement amplification ratio of 15.64. Obviously, the experiment result is close to the FEA simulation result (16.72), and it demonstrates the effectiveness of the FEA simulation. The model result (21.02) is larger than the other two results. There are two reasons account for this phenomenon. First, the theoretical model supposes that the deformation only occurs in the compliant hinge, while part of rigid structure also contributes to the deformation and consumes the energy. Second, the thickness of the gripper was not considered in the theoretical model, and this will affect the deformation capacity of the mechanism. As for the discrepancy of experimental and simulation result, it may be caused by the machining error, assembly error, and measurement error. In addition,
Figure 10d shows the hysteresis effect of the gripper due to the piezoelectric actuation. It causes a nonlinear relationship between the output displacement and input voltage, which requires a suitable control algorithm to achieve precise motion.
4.3. Open-Loop Test of the Natural Frequency
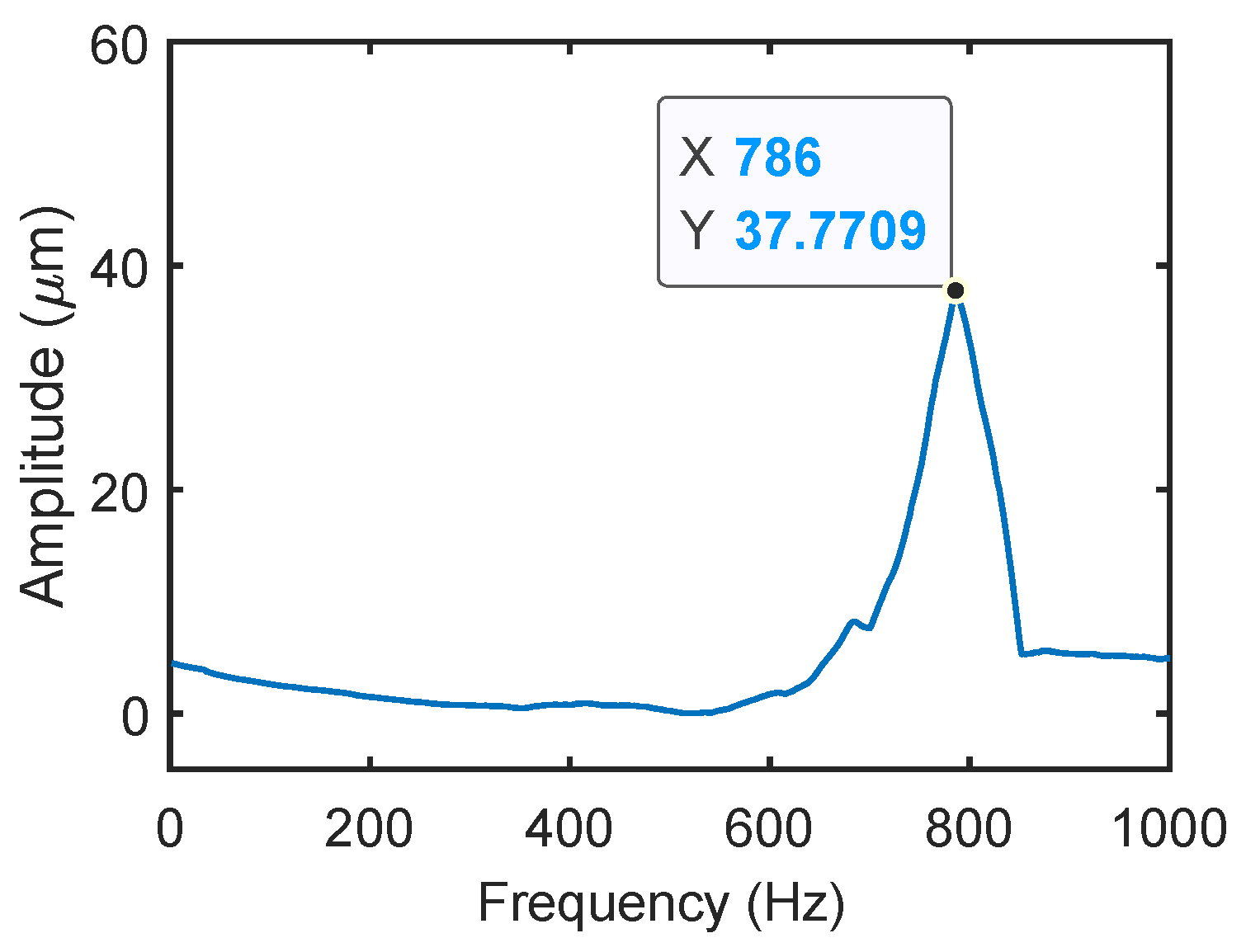
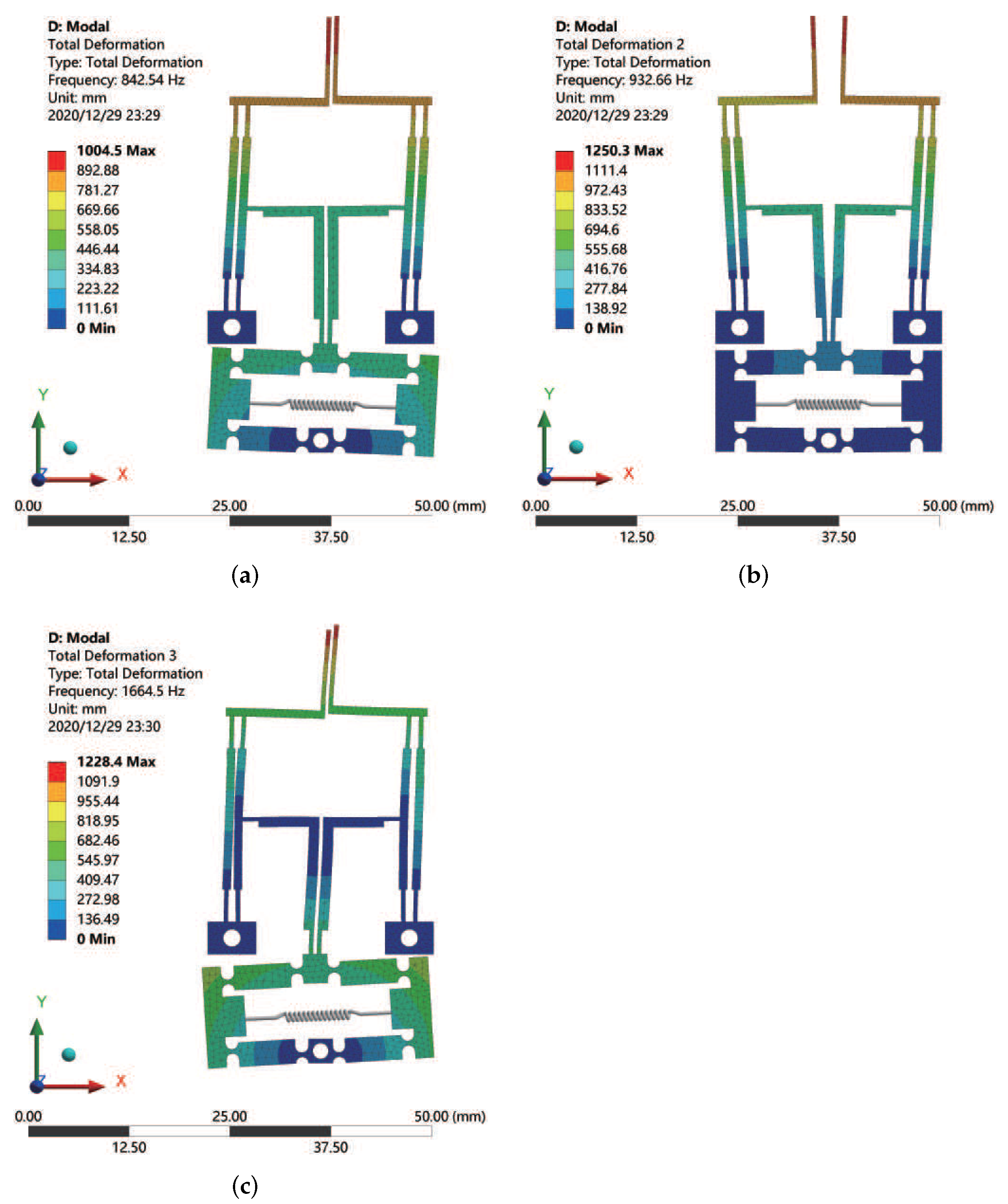
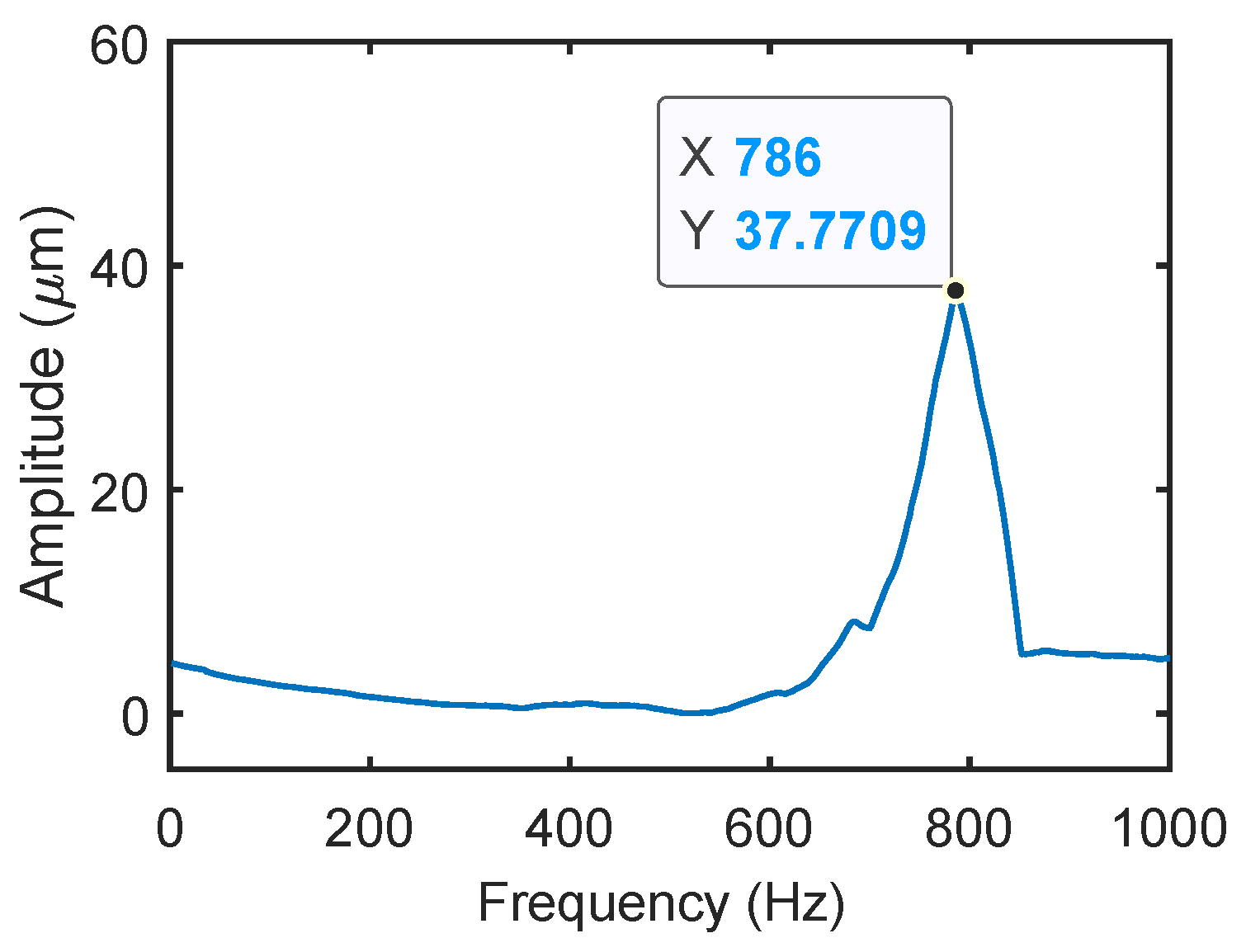
The dynamic analysis experiment of the gripper was carried out to identify the natural frequencies corresponding to the mode shapes of the clamp. A sinusoidal sweep signal was applied to PEA embedded in the microgripper to excite the system. The frequency range of sinusoidal sweep signals is 1 Hz to 1000 Hz, and the amplitude is 1 V. The sweep rate is 1 Hz/s, and the increment is 0.1 Hz. The NI cRIO 9022 operated in FPGA mode, and the sampling frequency was set to 3000 Hz. The laser displacement sensor is adopted to pick up the displacement signal at the jaw tip of the gripper.
The obtained frequency response is shown in
Figure 11. It can be observed that the peak of amplitude is located at the frequency of 786 Hz. That is, the first natural frequency of the microgripper is 786 Hz. The experimental result is slightly lower than the simulation result (843 Hz) and theoretical analysis result (922 Hz). The discrepancy is mainly induced by the increased mass of PEA, bolts, and gaskets in practice, which is not considered in the simulation and model. According to the theoretical expression Equation (
20), the introduced mass will increase the equivalent mass (
M) and lead to the reduction of natural frequency (
f).
4.4. Open-Loop Test of the Microgripper Force
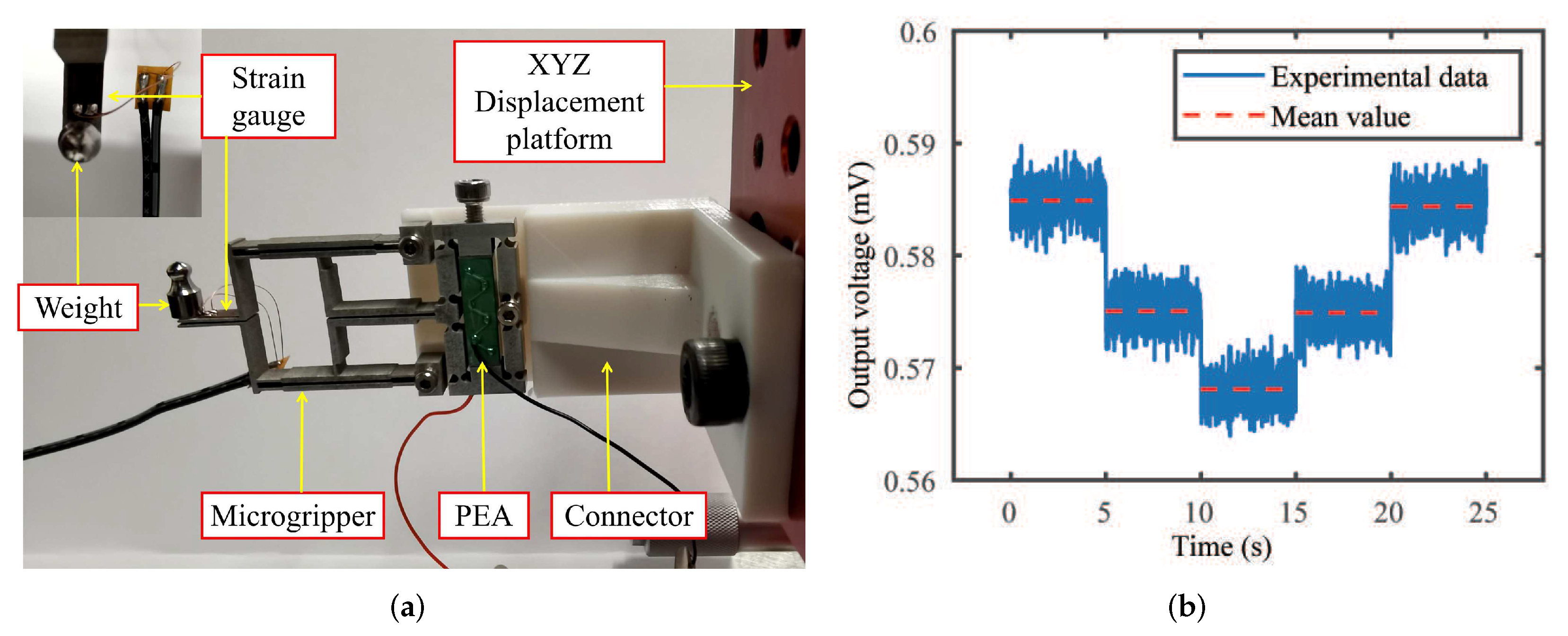
The strain-gauge force sensor was calibrated by gradually loading and unloading the gripper jaw with standard weights (1 g and 2 g), as shown in
Figure 12a. Without a weight load, the output voltage of the sensor is 0.585 mV. The sensor output signal obtained by the calibration experiment is shown in
Figure 12b. When the weight is loaded to elongate the strain gauge, the output voltage gradually decreases. The unloading process shows the opposite change tendency. The calibration result of the force-to-electricity conversion coefficient of the strain-gauge force sensor is obtained as −1185.2 mN/mV.
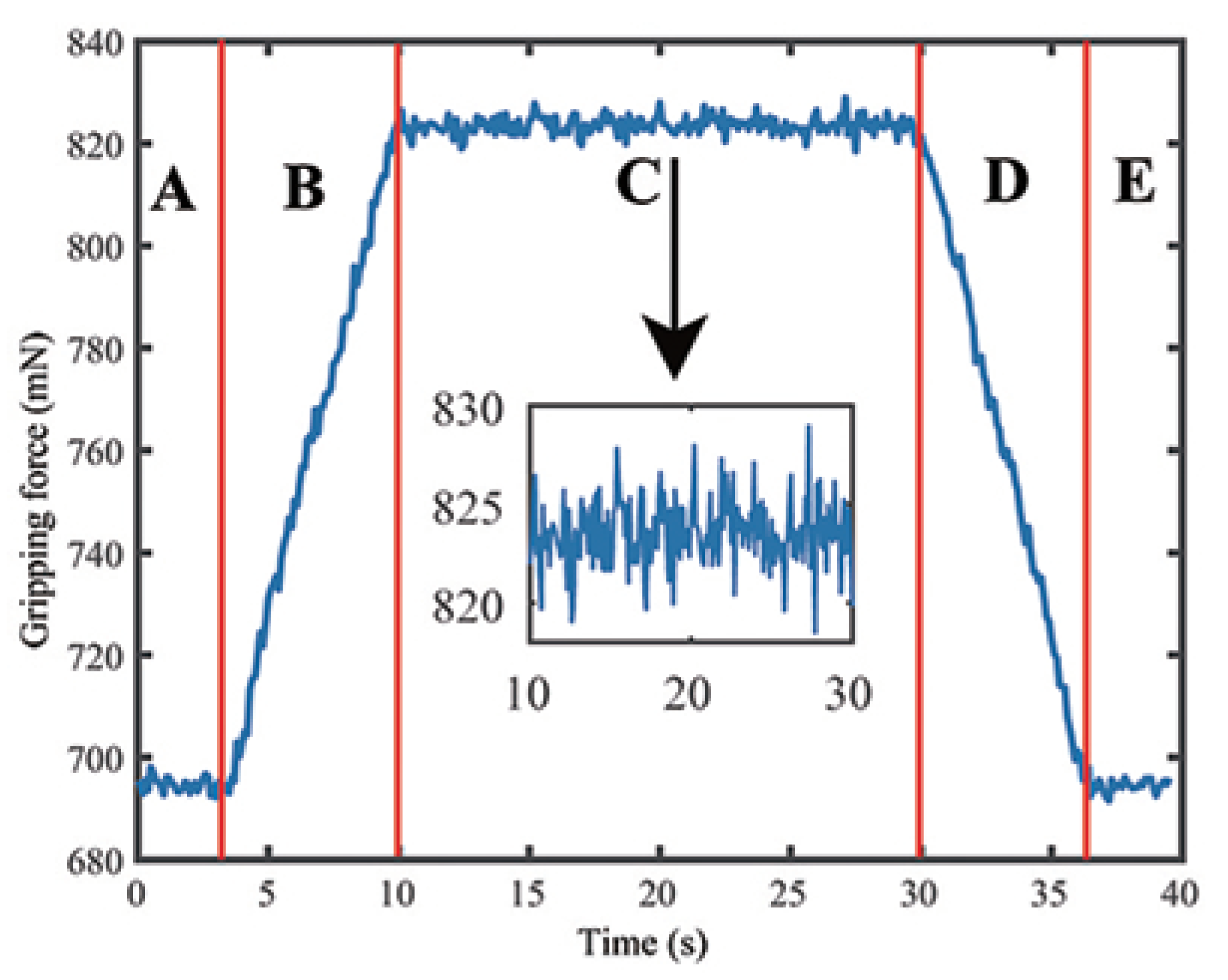
The gripping experiment is carried out using a metal micro-wire with the diameter of 350
m. The strain-gauge output voltage obtained in the gripping experiment is converted into force value, as shown in
Figure 13. The gripping process is divided into five stages: A–B–C–D–E. In phases A and E, the microgripper does not contact the wire. Thus, the gripping force is close to 692.91 mN (zero offset). After entering phase B, the microgripper begins to contact the wire, and the gripping force increases with the input voltage. The situation in stage D is just the opposite process of releasing. Phase C corresponds to the stable gripping phase when the input voltage is held on. It is observed that the gripping force at this time is about 823.71 mN, which means that the maximum relative gripping force during the whole process is 130.80 mN. The measured tendency of gripping force is consistent with the FEA simulation and conforms to the predicted laws of physics. The force sensor noise is shown in the inset of
Figure 13, which indicates a two-standard deviation (2
) of 1.69 mN. That is, 95% of force sensor signals lie within the range of 130.80 ± 1.69 mN. Hence, the resolution of the force sensor is about ±1.69 mN.
5. Experimental Results of the Microgripper with Closed-Loop Control
Due to the presence of nonlinearity such as the hysteresis effect, it is necessary to implement a closed-loop control for achieving precision motion tracking of the gripper jaws. In this work, the proportional-integral (PI) control strategy was applied for the demonstration of closed-loop control to realize precise motion control of the microgripper.
When there is only proportional control, the system output exhibits a steady-state error. To eliminate the steady-state error, an integral control term is introduced in the controller. Thus, the PI controller can eliminate the system’s steady-state error after its response enters the steady state. The control action of the PI controller is described as follows.
where
is the proportionality coefficient,
is the integration time constant,
is the error input, and
is the output signal of the controller. The parameters of the PI controller (
= 35 and
= 0.00005) were tuned by trial-and-error for generating satisfactory tracking results. The data acquisition frequency of the closed-loop control system was set as 1 kHz.
5.1. Experimental Results of Motion Tracking
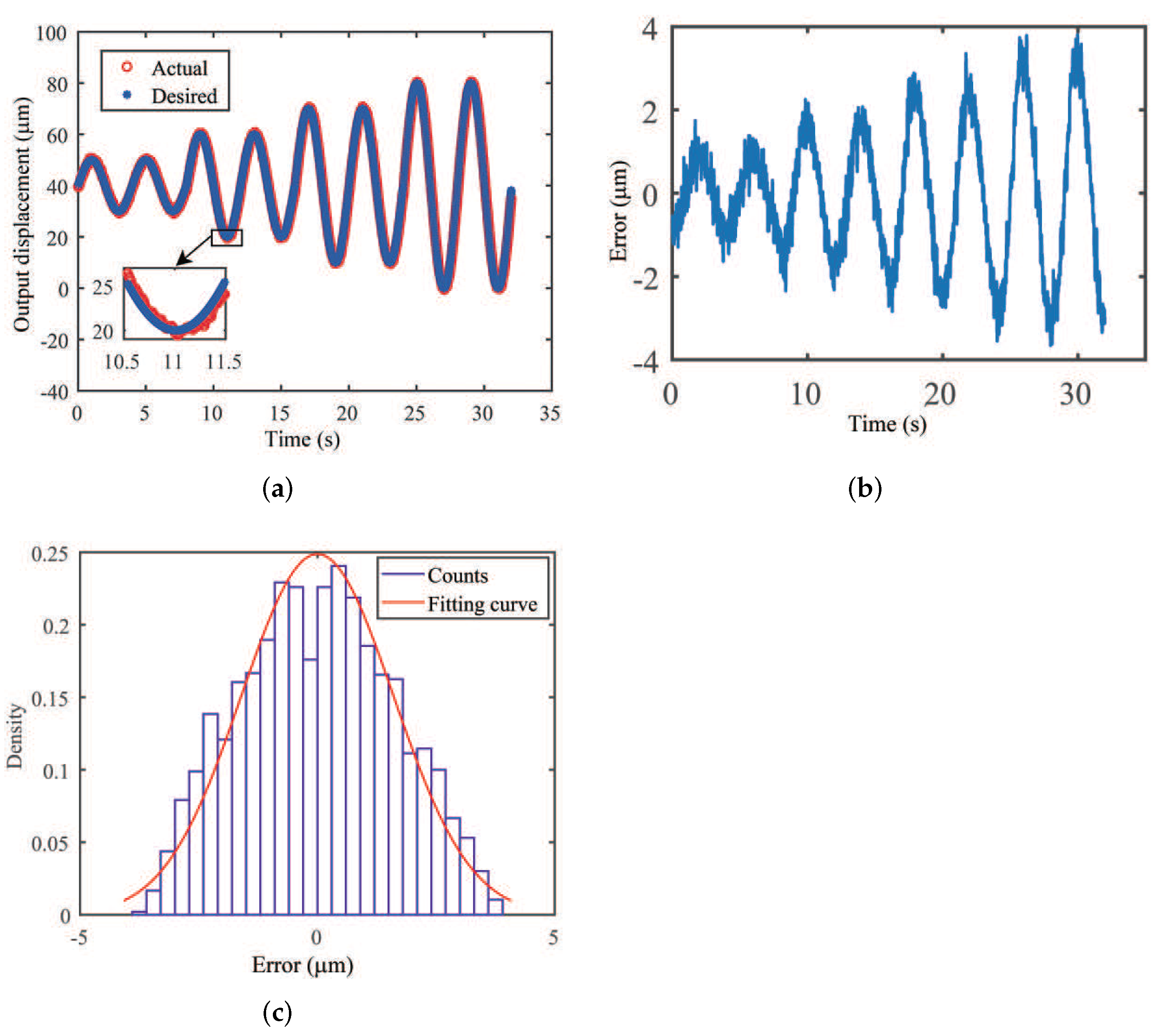
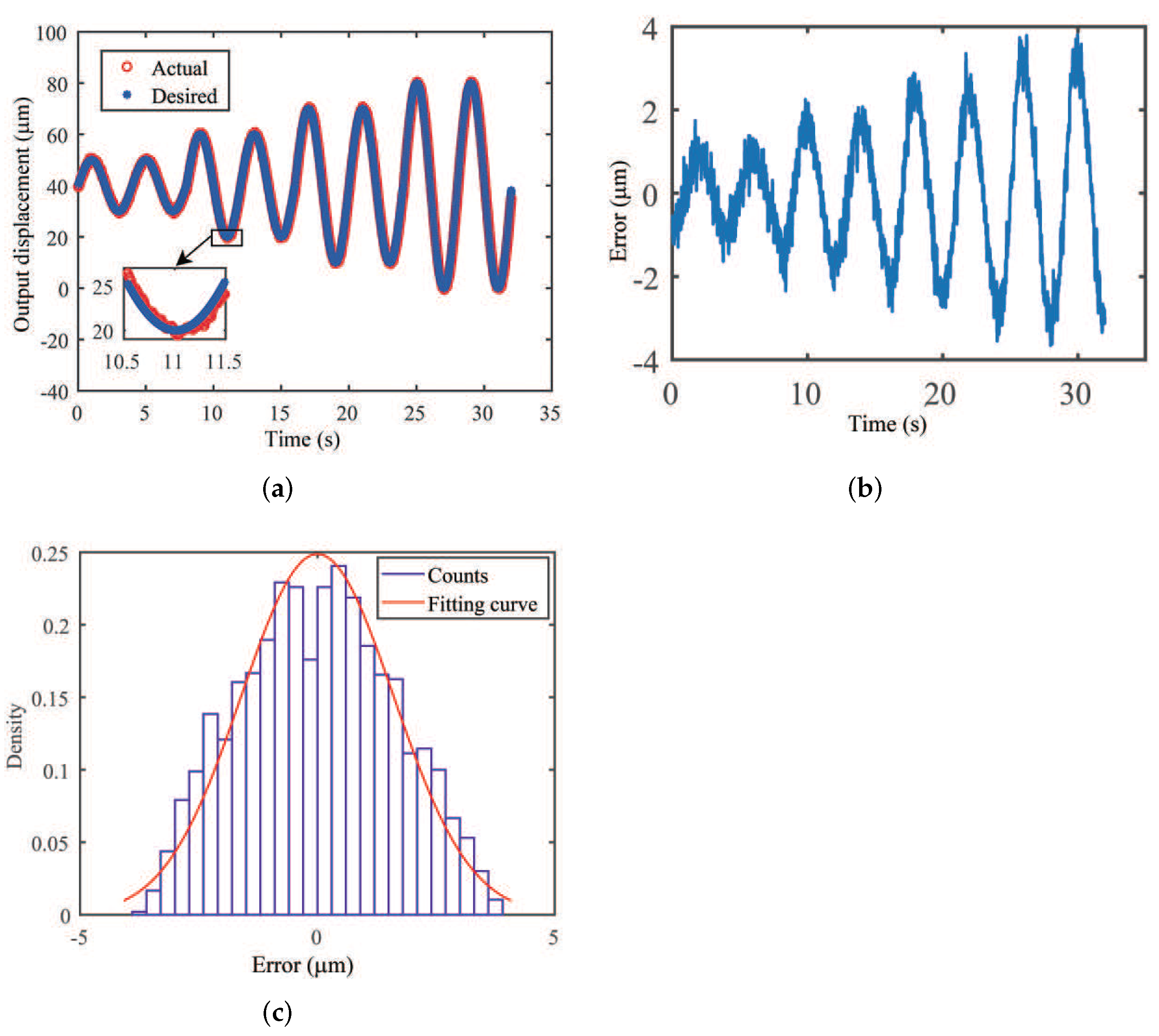
First, the sinusoidal motion trajectories of different amplitudes at a frequency of 0.25 Hz were used to test the microgripper performance. The signal of each amplitude was continuously driven for two cycles. The experimental results of position tracking and tracking errors are shown in
Figure 14. The maximum errors are obtained as 1.38
m, 2.16
m, 2.88
m, and 3.81
m, corresponding to the overall amplitudes of 20
m, 40
m, 60
m, and 80
m, respectively. The errors are 6.9%, 5.4%, 4.6%, and 4.7% of the maximum amplitudes of the corresponding output displacements, respectively. The error data obtained from the experiment meet the normal distribution condition with 2
of 2.54
m, i.e., 95% confidence interval for the error locating in ±2.54
m.
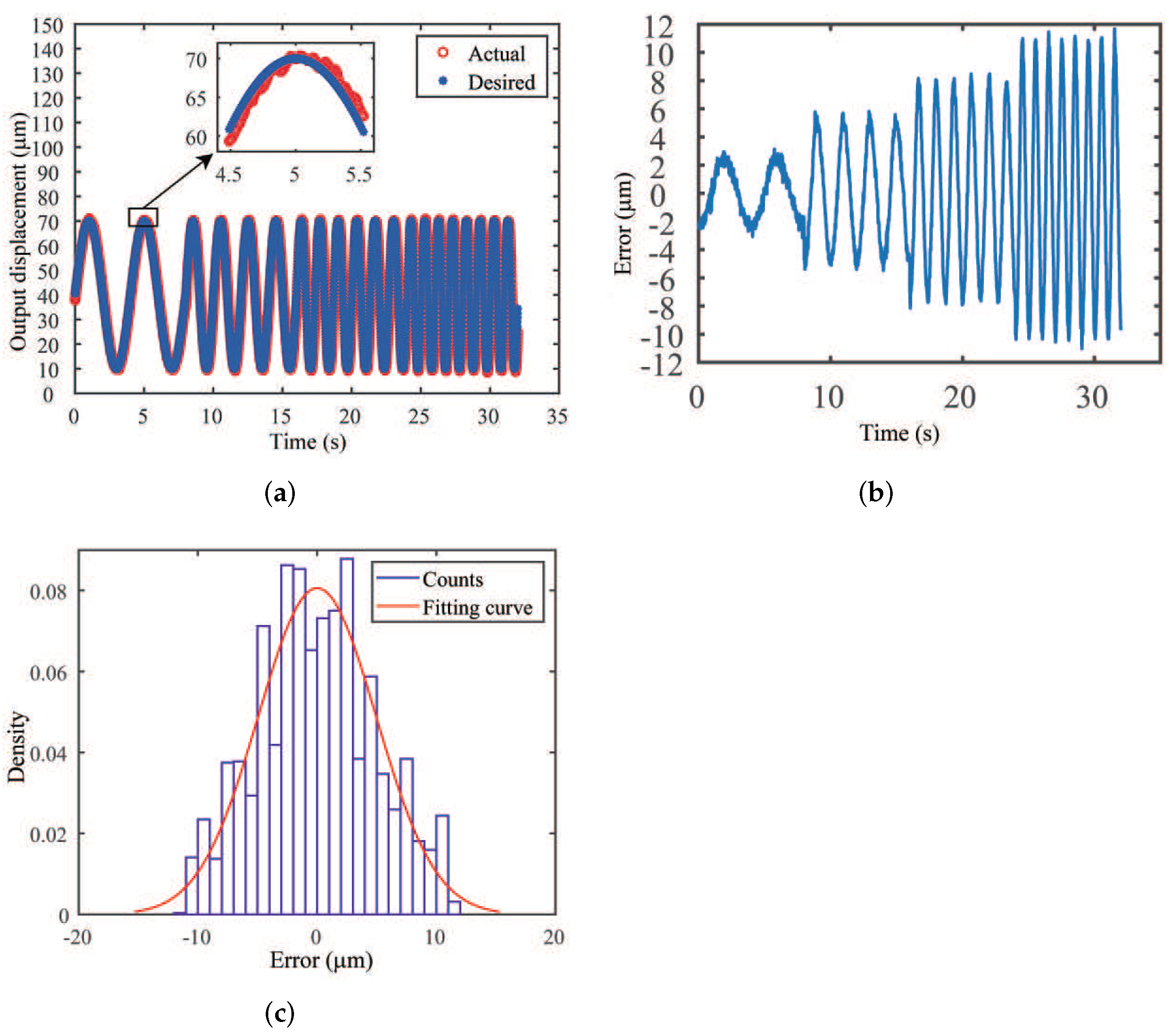
Second, experimental studies were conducted by varying the frequency of the sinusoidal trajectory with the amplitude of 60
m. The results are shown in
Figure 15. It is seen that the maximum tracking errors are 2.81
m, 5.61
m, 8.07
m, and 11.06
m for the corresponding frequencies of 0.25 Hz, 0.5 Hz, 0.75 Hz, and 1 Hz, respectively. The percentage maximum tracking errors with respect to the amplitude of the reference input are 4.6%, 9.3%, 13.4%, and 19.3%, respectively. Similarly, the error signal in the whole process follows a normal distribution with 95% confidence interval of ±9.88
m.
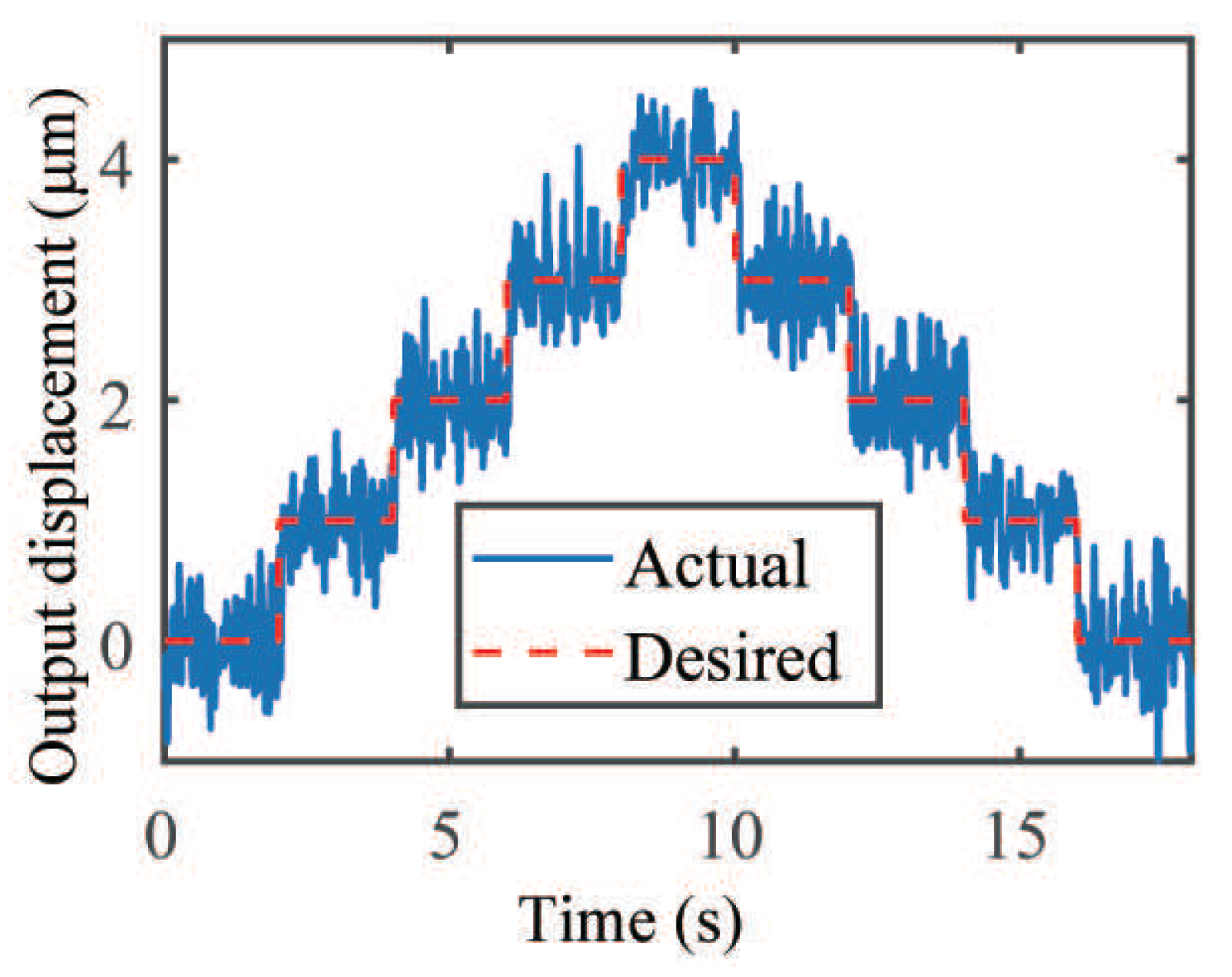
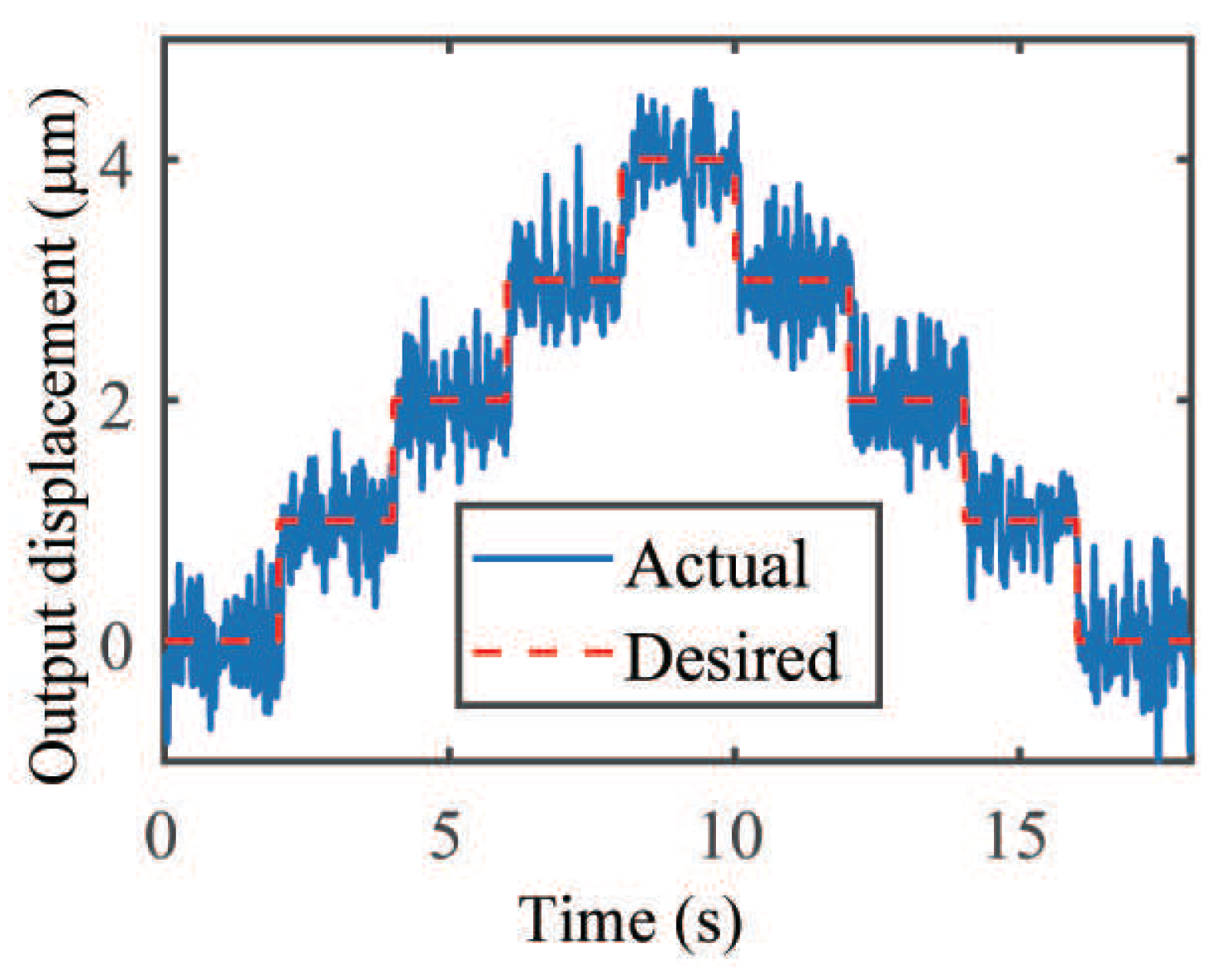
Third, to verify the motion resolution of the microgripper, step response experiments were performed. A stair signal with a constant time of 2 s and amplitude of 1
m for each step was used. The reference input signal and tracking results are presented in
Figure 16. The fluctuation of the experimental data is caused by the noise of the adopted laser displacement sensor with 2
= 0.5978
m. That is, 95% of sensor readings lie within the range of about ±0.6
m. Thus, the experimental results reveal that the closed-loop motion resolution of the microgripper is about ±0.6
m. The experimental results confirm the satisfactory performance of the developed microgripper with PI control algorithm.
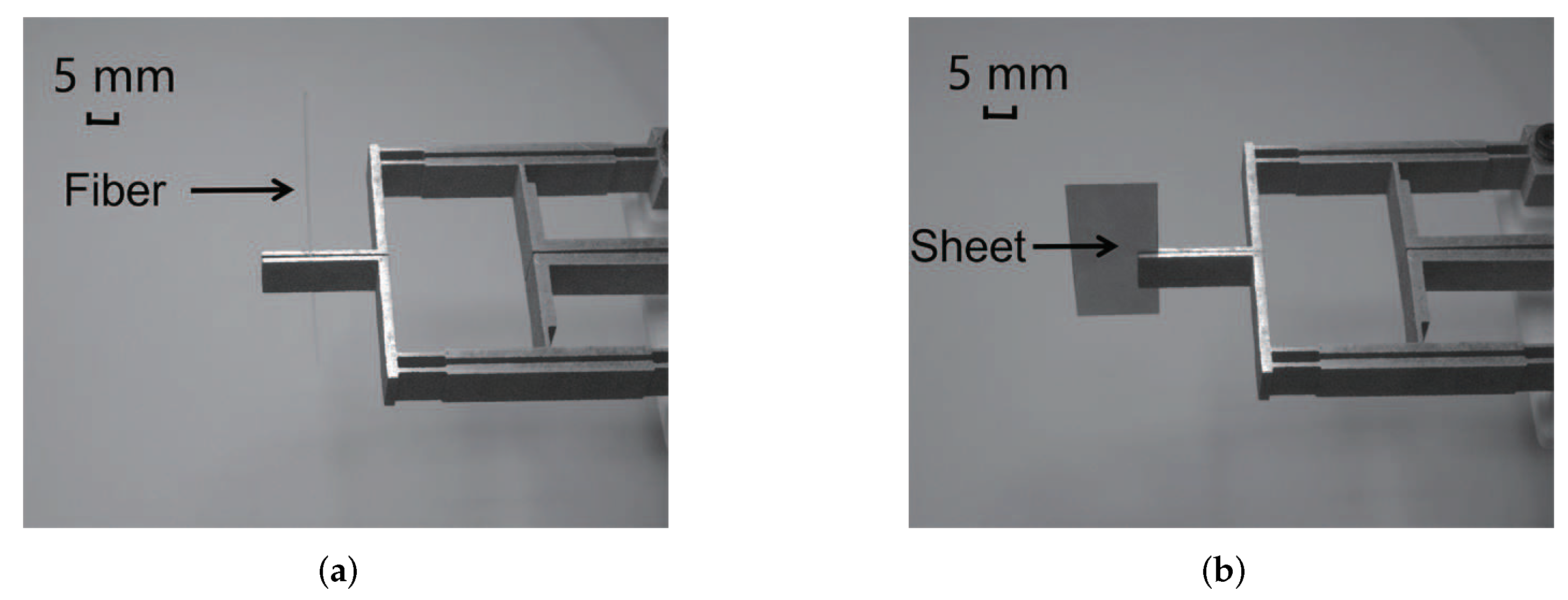
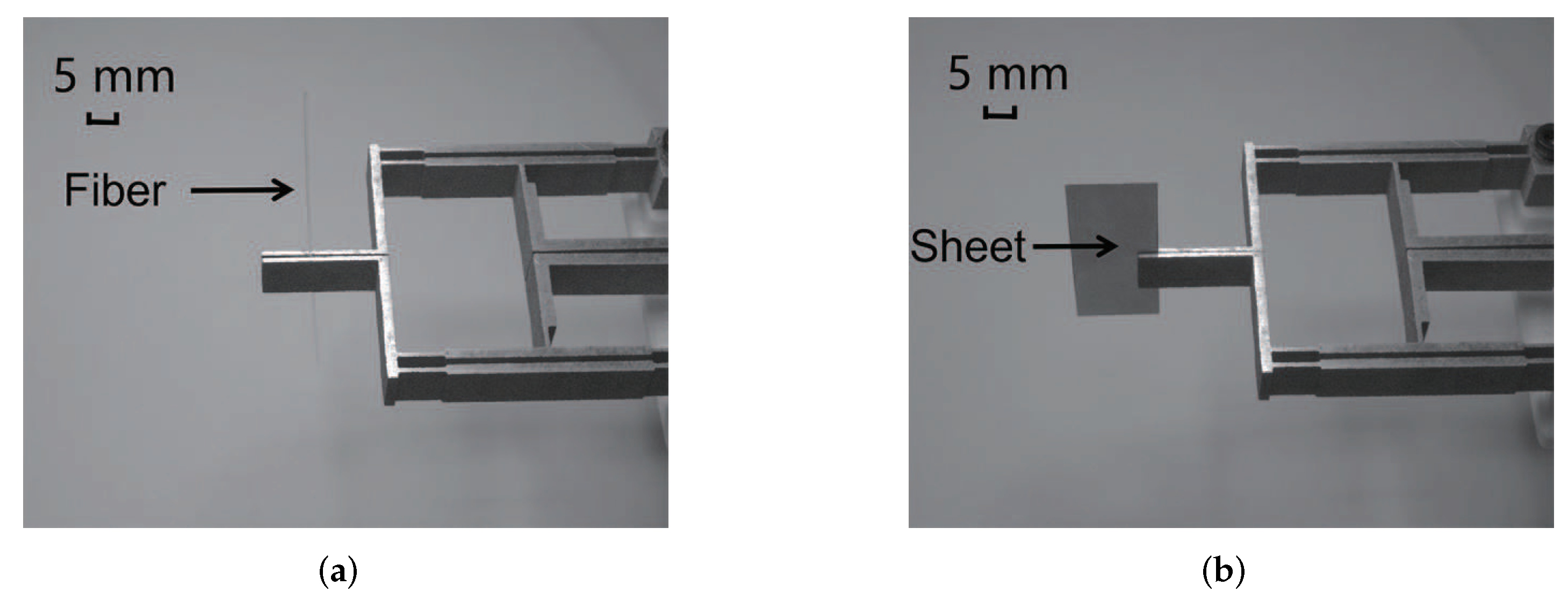
5.2. Experimental Results of Gripping Test
To demonstrate the gripping capability of the designed gripper, the gripping experiment was carried out using an optical fiber with a diameter of 200
m and a metal sheet with a thickness of 100
m. The snapshots of clamping states are shown in
Figure 17.
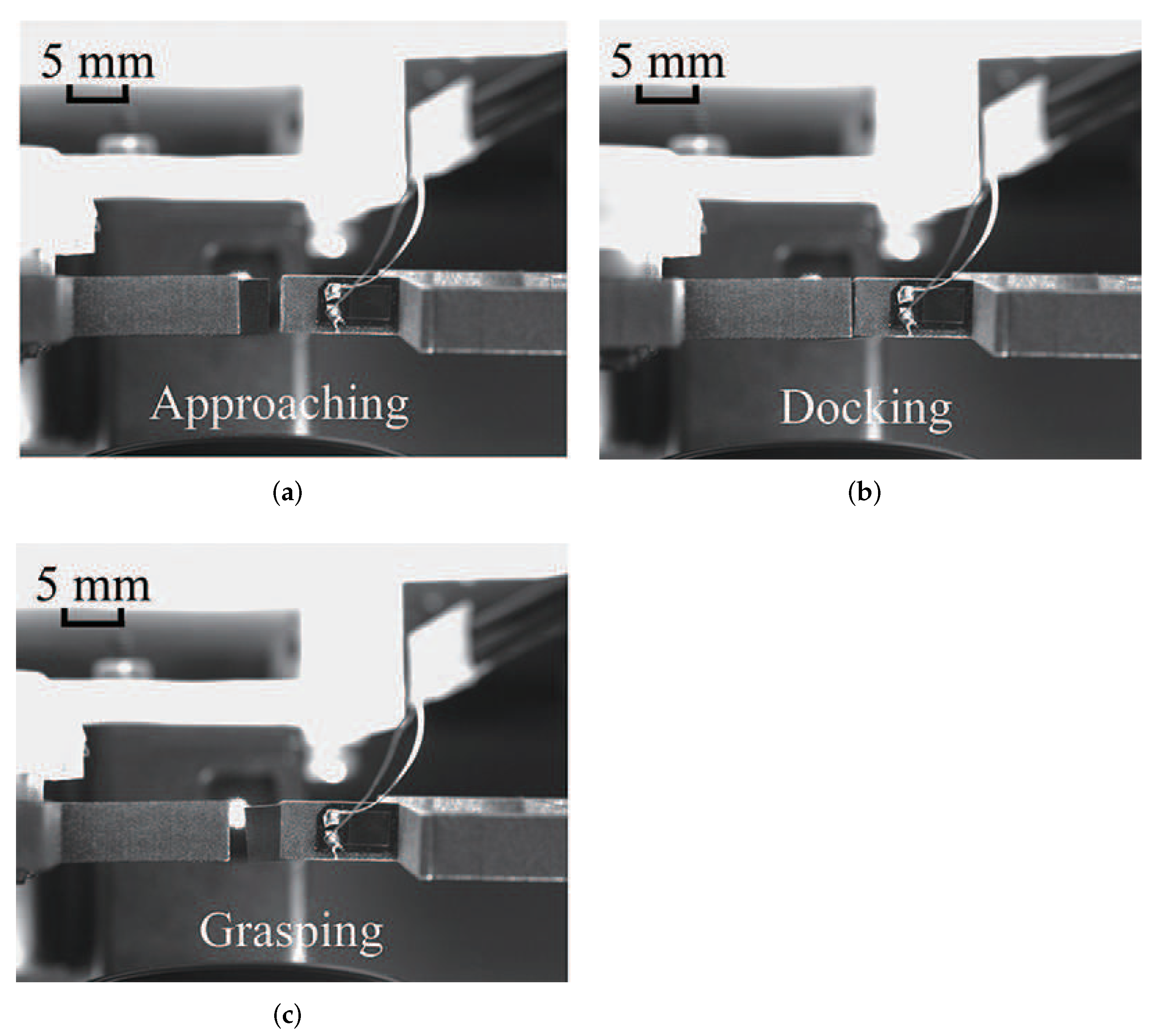
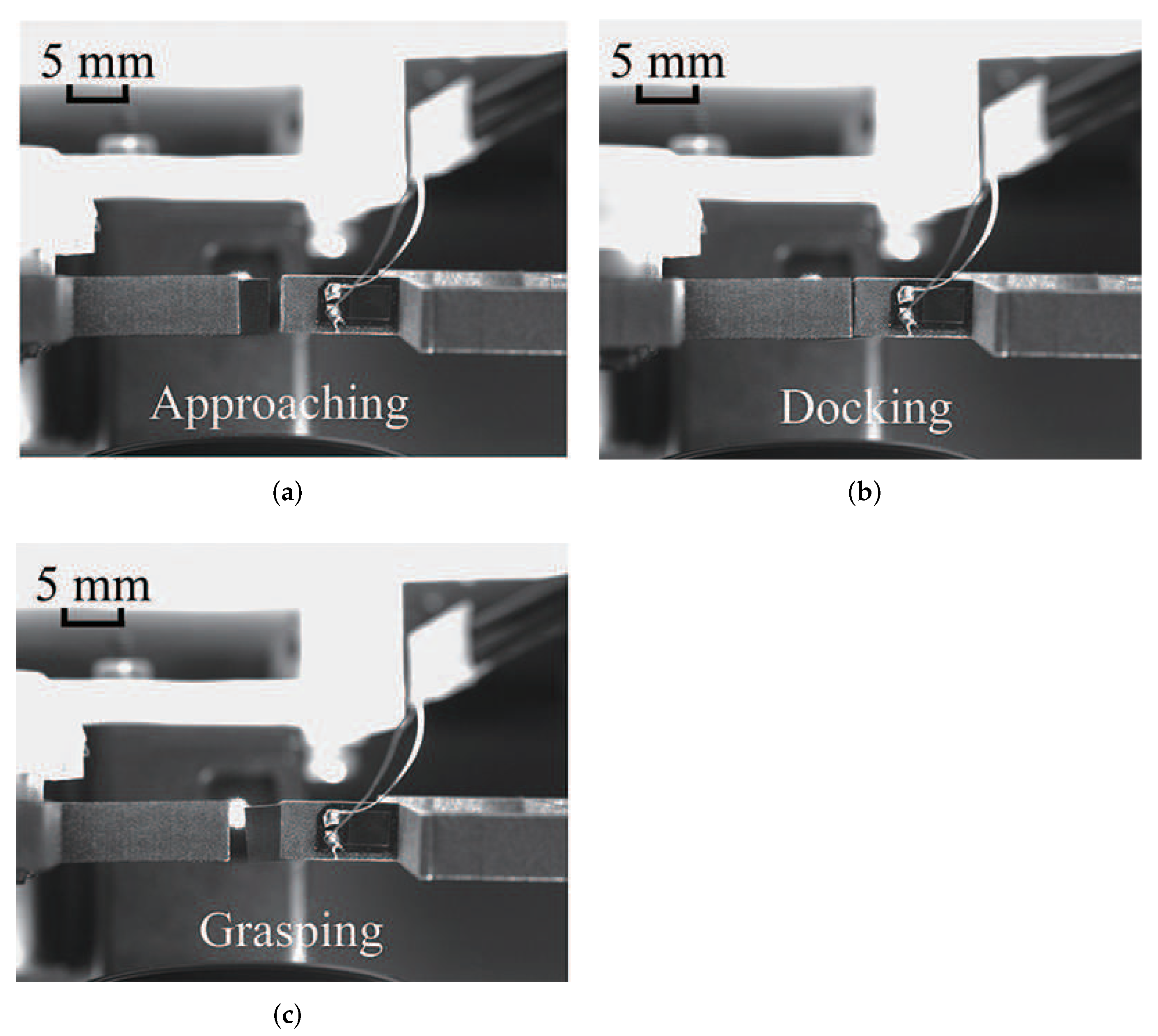
Moreover, the gripping performance is also demonstrated by the docking gripping for a square shim with the thickness of 200
m. The docking process is shown in
Figure 18. Two microgrippers were used in the docking experiment. First, the left gripper clamped the shim and approached to the right. Then, alignment was achieved by manually adjusting the gap between the two grippers. Next, the right gripper was driven to clamp the shim. At this moment, the left gripper released the clamp jaw and drew back to the left. Finally, the shim was successfully held in the air by the right gripper, i.e., the designed gripper in this work. The proposed microgripper exhibits a reliable working ability to adapt to physical micromanipulation tasks.
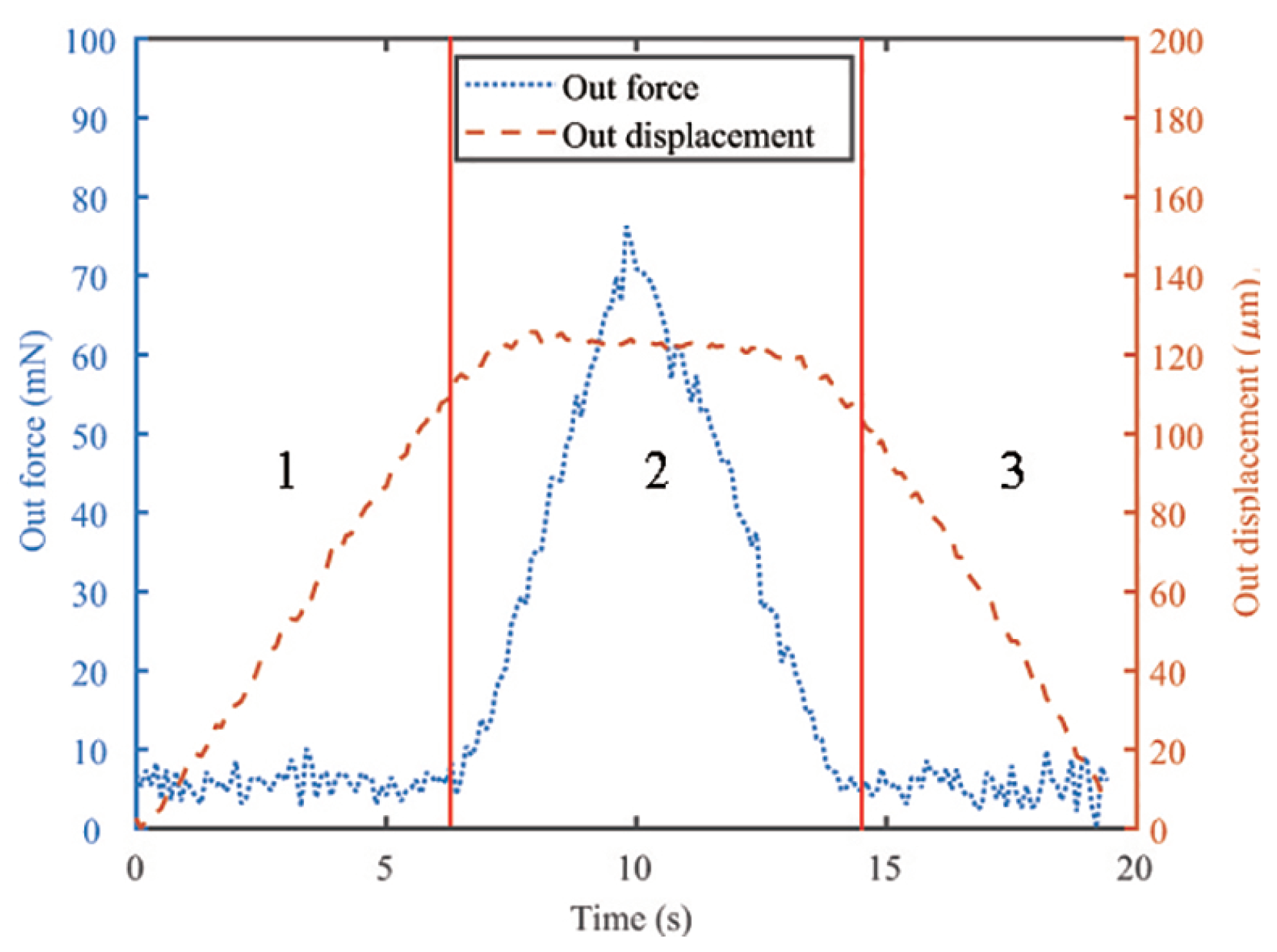
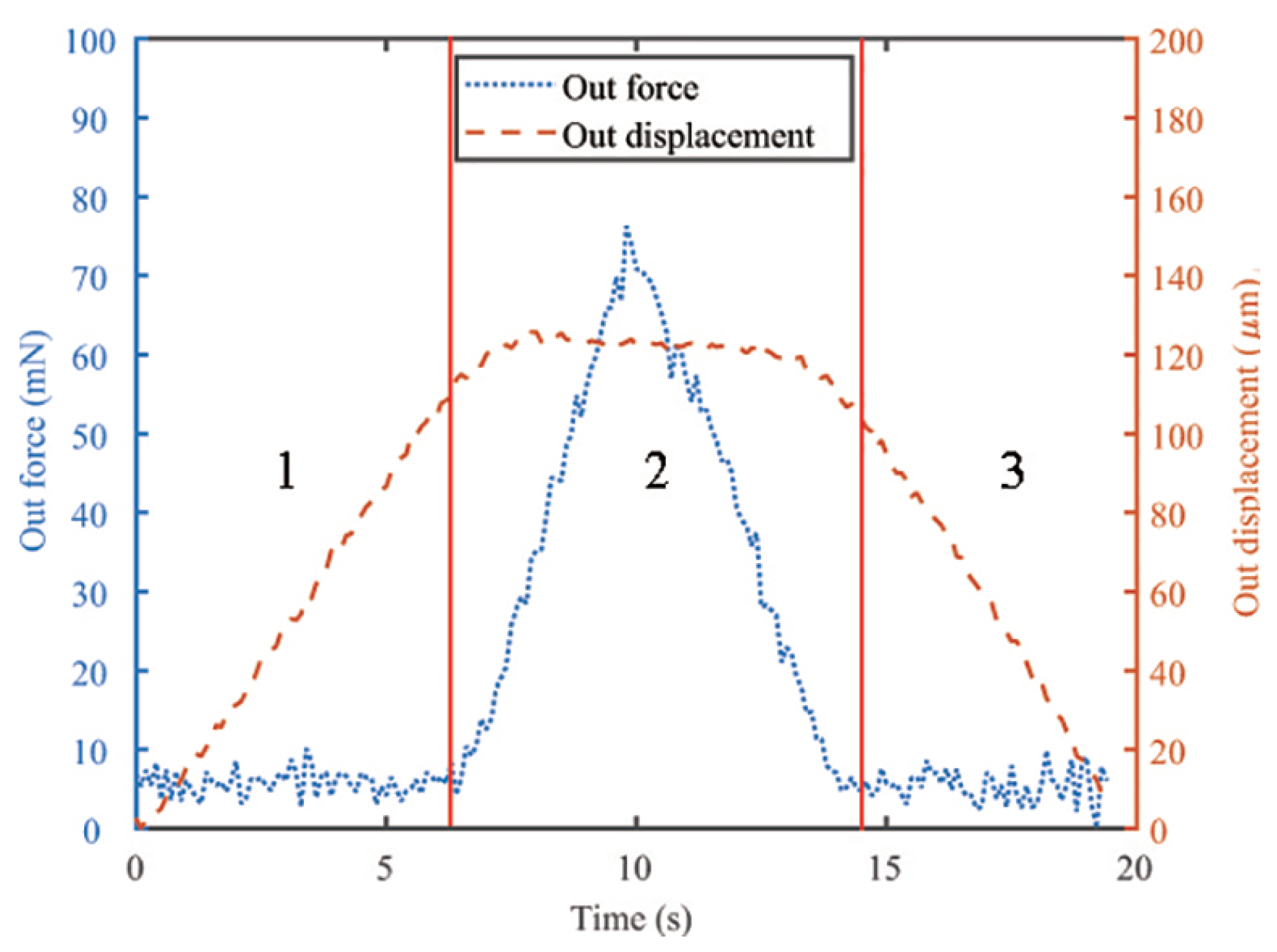
As the micro-object is easily damaged, it is necessary to control the gripping force during the operational process. In this work, a case study of micro-wire gripping is demonstrated to realize the non-destructive precision gripping by utilizing the position/force switch control strategy. First, position control is implemented when the gripping jaws approach the wire. After contact, the force control comes up while the position control is closed. Before using the hybrid control strategy, an open-loop control experiment of a full-scale driving voltage is helpful to find valuable information about the gripping displacement and force.
Figure 19 shows the displacement and force signals during the open-loop test for gripping a micro-wire with the diameter of 350
m. The dotted curve represents the gripping force signal, and the dashed curve denotes the jaw displacement signal. According to different gripping processes,
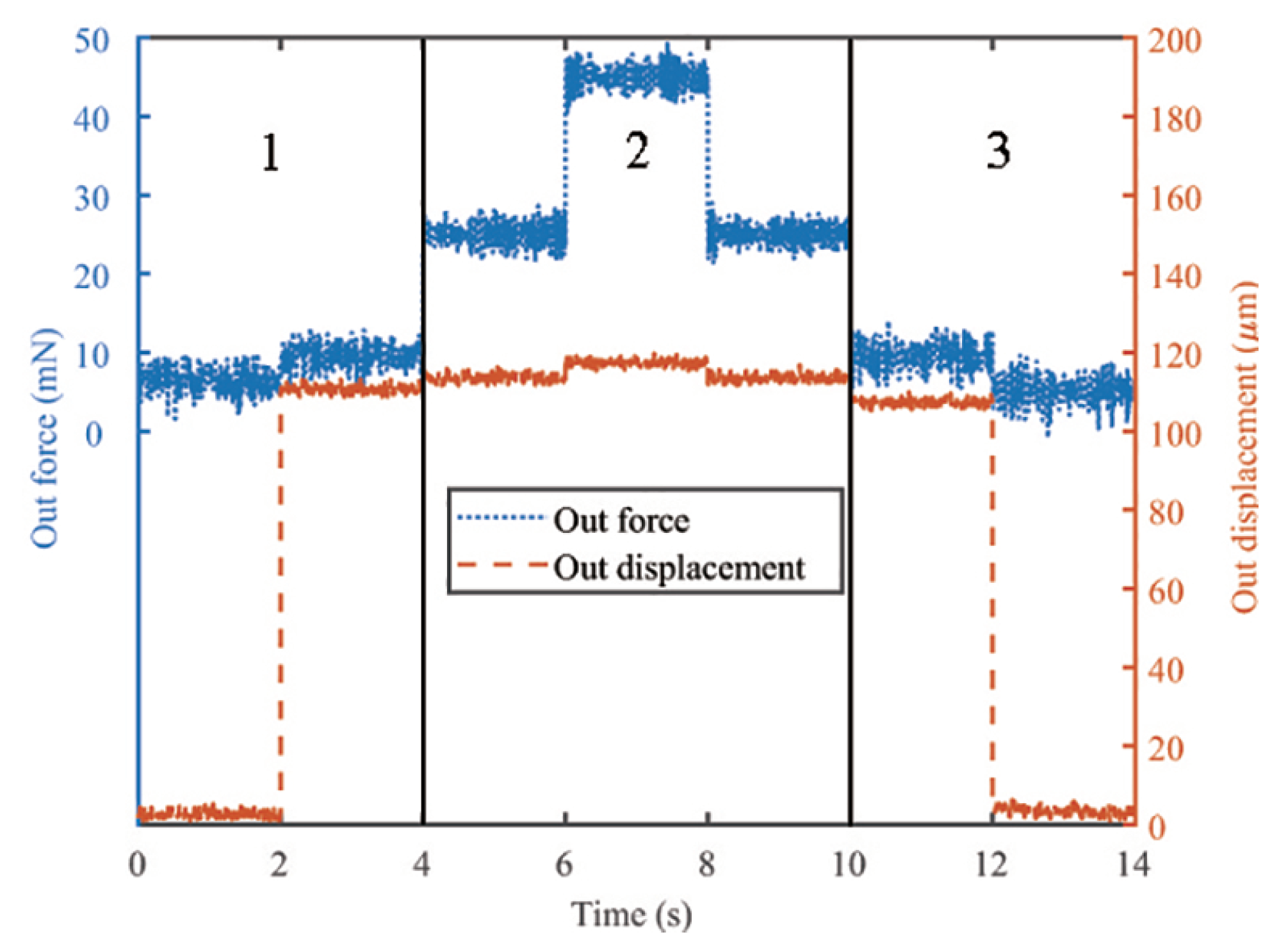
Figure 19 is divided into three segments. The displacement changes sharply while the gripping force is nearly unchanged during segment 1 and segment 3. However, the curve of segment 2 presents the opposite phenomenon. The dividing points between different segments can be easily observed, which are used in the control experiments. The testing result of the closed-loop gripping experiment with position/force switch control is shown in
Figure 20. Similarly,
Figure 20 is also divided into three segments according to the difference in the control variable. Segment 1 and segment 3 correspond to the position control stage, which realizes the grasp and release of the metal wire via the step position signal. It is observed that the gripping position and force were effectively controlled based on the PI control strategy.
5.3. Performance Comparison
To further evaluate the performance of the fabricated microgripper, it is necessary to compare the proposed microgripper with previous designs of piezoelectric-actuated gripper in the literature. The main performances, including the displacement magnification ratio, gripping stroke, and natural frequency of typical grippers, are shown in
Table 2. They indicate that the proposed microgripper has the advantages of large gripping stroke and high natural frequency among these designs. To highlight the overall advantages of the gripper, a new parameter is defined. The new parameter is the product of working stroke and resonant frequency. It takes into account the working stroke and resonant frequency of the gripper. The higher its value is, the stronger the comprehensive ability of the gripper is. In the last column of
Table 2, the proposed gripper exhibits the largest parameter value. Therefore, the designed microgripper has superior comprehensive performance.
By examining the relationship between the first two sets of data (amplification ratio and gripping stroke), it can be concluded that the magnification ratio is not directly proportional to the gripping stroke. This is the reason why the gripping stroke rather than magnification is adopted as the design objective for the gripper.











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}