1. Introduction
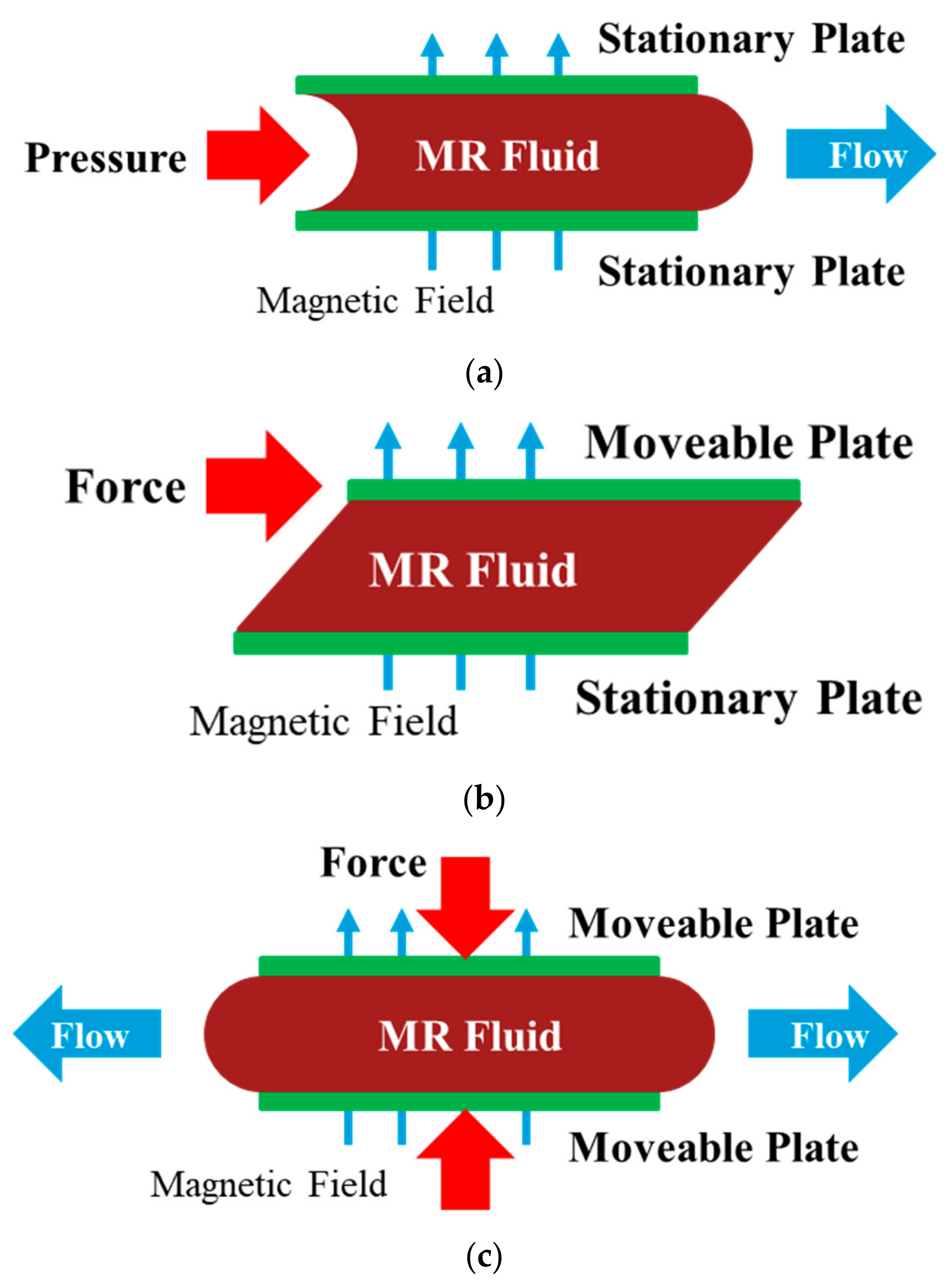
Magnetorheological (MR) fluid is a type of smart material whose rheological characteristics can be continuously controlled based on the intensity of an applied external magnetic field. MR fluid is composed of a base oil and magnetizable micro-scale iron particles, as well as additives such as surfactants. The iron particles randomly distributed in the base oil are magnetized by an externally applied magnetic field to form a chain structure, and the force required to break the chain structure serves as the actuating force in MR fluid-based actuators. Because the bonding strength of the chain structure increases proportionally to the intensity of the applied magnetic field, the actuating force can be continuously controlled by adjusting the intensity of the magnetic field. When a chain structure is formed inside a MR fluid according to the application of a magnetic field, it externally changes from a liquid phase to a solid-like phase, and this characteristic change is reversible. The operation modes of a MR actuator can be classified into flow, shear, and squeeze modes. The conceptual configuration of each mode is illustrated in
Figure 1. In the flow mode, as shown in
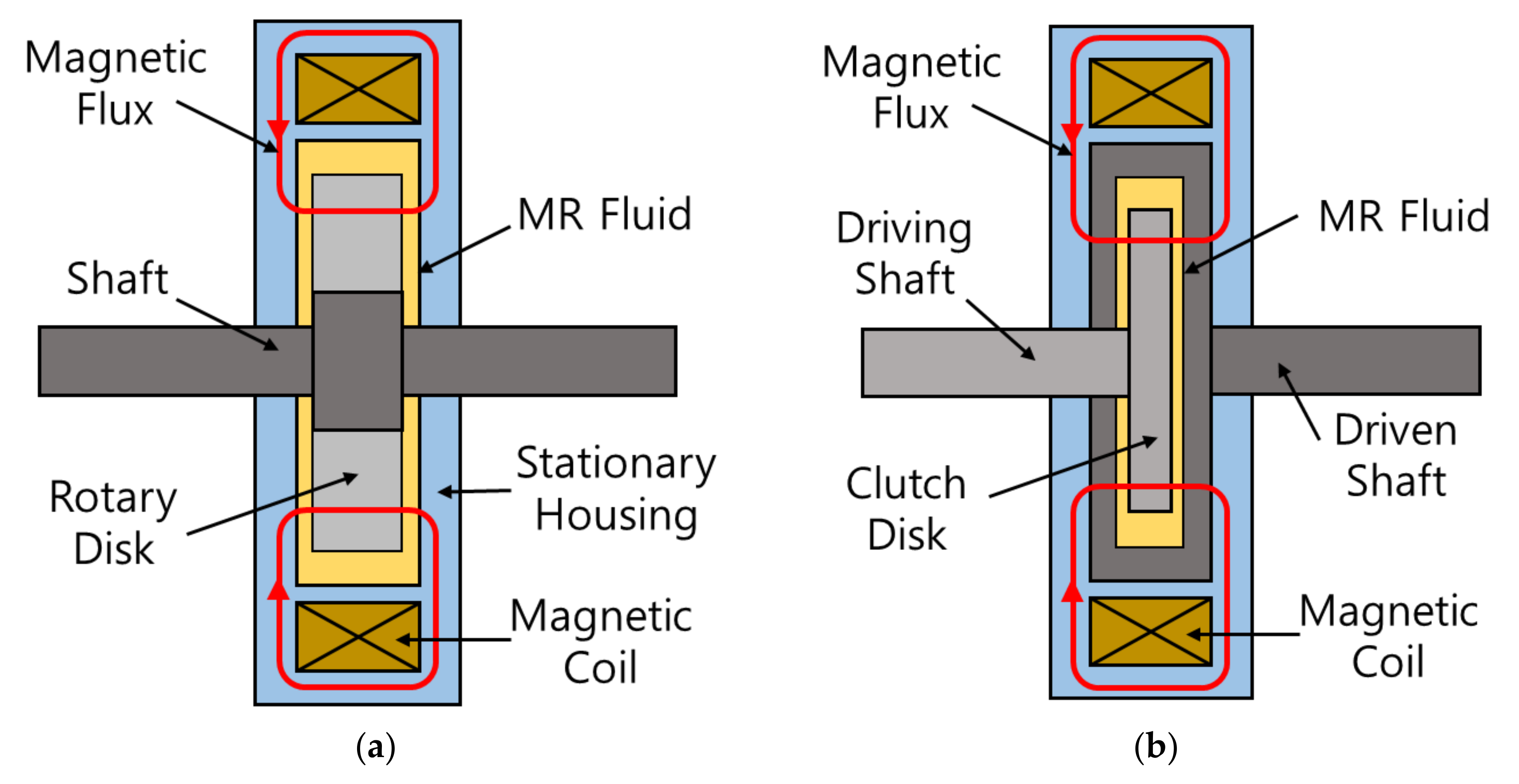
Figure 1a, the MR fluid fills the space between two stationary plates and flow occurs due to the result of the pressure difference between the two ends. A magnetic field is applied perpendicular to the flow. A damper is the most representative type of actuator that utilizes the flow mode. In the shear mode, as shown in
Figure 1b, the MR fluid fills the space between a stationary plate and a sliding plate, and a magnetic field is applied in a direction perpendicular to the moving plate. For the plate to move, the chain structure formed in the MR fluid must break. The force that breaks the chain structure is expressed as an actuating force. Brakes and clutches are typical actuators that use the shear mode. In the squeeze mode, as shown in
Figure 1c, the MR fluid fills the space between two moving plates. A magnetic field is applied in the same direction as the moving direction of the plates and flow occurs perpendicular to the moving direction of the plates. The squeeze mode is suitable for cases in which the displacement is small, but a large actuating force is required and is typically utilized in dampers or mounts. Actuators such as dampers, brakes, clutches, and mounts are representative devices in which MR fluid are applied. Actuators using MR fluid have the disadvantage of having to design a magnetic core for generating a magnetic field, but they have many advantages such as fast response times (less than 1 ms), low power consumption (less than 5 W for a vehicle damper), and simplicity of structural design. A unique advantage of MR actuators is that they can exhibit failsafe features without requiring additional devices, unlike conventional active actuators such as motors or passive actuators such as hydraulics. These advantages are attractive for utilizing MR actuators in various industries such as automotive engineering, aerospace engineering, manufacturing engineering, and civil engineering.
In the first part of this review article, recent research works related to MR sandwich structures, which have been extensively studied in the field of vibration and noise reduction and control, are discussed. In this study, for MR sandwich structures, a comprehensive review was performed with a focus on design configurations, modeling techniques, and control algorithms, and vibration and noise control characteristics were investigated. In the latter part of this review, recently reported MR actuators such as dampers, mounts, brakes, and clutches, are classified by application field, and the features of the newly proposed actuators are investigated. The application fields considered in this study include not only traditional automotive, aerospace, manufacturing, and civil engineering fields but also robotics, rehabilitation engineering, and haptic interfaces, which have recently received increasing attention. In particular, the degree of freedom of the system to which MR fluid actuators are applied was also considered in this review. This review article can help readers understand the design characteristics of MR actuators according to different application fields and can provide useful guidelines for the practical implementation of MR actuators in various application fields.
2. MR Sandwich Structure
There are numerous applications of MR fluid, and these applications can be classified into two sectors: traditional dynamic systems and flexible structures. In the dynamic systems, principal design objectives are force, moment, and torque focusing on the field-dependent yield stress of MR fluid itself, while the objectives are damping and stiffness properties focusing on the field-dependent complex modulus of MR fluid core of the sandwich structures. Therefore, the former sector includes a wider range of the applications than the latter such as the damping force of the MR damper and the torque control of the MR brake. The latter sector is mainly focused on the vibration control of flexible structures such as long flexible links of the space robot and flexible blades of the helicopter. The vibration control of flexible structures plays a fundamental role in various applications such as large structures in space engineering and bridge cables in civil engineering. Thus far, three different types of methods have been used to suppress or control unwanted vibrations, namely, passive, semi-active, and active methods. Passive methods provide reasonable performance using a simple methodology but have several limitations such as the lack of real-time avoidance of time-varying resonances. Active vibration control methods are very effective under uncertain environmental conditions but cause instability and incur high implementation costs based on the use of multiple actuators and sensors. Semi-active vibration control methods provide effective vibration control performance through energy dissipation using viscoelastic materials such as polymers, rubber, electrorheological fluid, and MR fluid. Recently, it has been verified that the semi-active vibration control technique using MR fluid as a core layer in sandwich structures is very promising. The generic concept for the development of sandwich structures is illustrated in
Figure 2, which presents a deformable solid-embedded ME fluid domain. The specific standard structures associated with this concept include sandwich beams, sandwich plates, and sandwich shells, which contain the MR fluid domain as a core layer, as shown in
Figure 2. Because these structures have the infinite degree-of-freedom, in practice, a finite multiple degree-of-freedom (multi-DOFs) is frequently considered for the identification of modal properties such as the natural frequency of each mode. In this section, sandwich structures studied over the past five years are reviewed in terms of design configuration, modeling, and control approaches in the order of sandwich beams, sandwich plates, and applications of sandwich structures. As mentioned, the passive sandwich structures have limited performance with respect to vibrations with a wide frequency range or time-varying characteristics. These limitations can be resolved by utilizing MR sandwich structures, which can be controlled continuously in a wide frequency spectrum with the robustness against external disturbances. The semi-active vibration control using MR sandwich is very attractive to a very thin structure since the structural stability is assured all the time by realizing the energy dissipation effect.
Walikar et al. fabricated a cantilever sandwich beam consisting of three layers, where the top and bottom layers were aluminum sheets and where MR fluid was encapsulated between the sheets [
1]. Through experimental tests, they determined that the controllability of vibration characteristics such as the natural frequency and the damping factor can be achieved by modulating the intensity of the magnetic field applied to the MR fluid domain. Biju et al. studied the damping characteristics of a bidirectional sandwich composite beam containing the MR fluid as a core and investigated the field-dependent damping property and natural frequency with various magnet positions [
2]. Kolekar et al. proposed a sandwich beam featuring the MR fluid as a core material and modeled and calculated the first-mode damping ratio and the natural frequency and compared them to measured data [
3]. Naji et al. studied the vibration behavior of adaptive laminated composite beams integrated with a MR-fluid layer using a modified layer-wise displacement theory in which each layer was modeled based on the first-order shear deformation theory [
4]. Romaszko and Sapinski investigated the dynamic behavior of three-layered cantilever sandwich beams filled with MR fluid with different iron-particle contents by volume [
5]. They fabricated two different types of beams, namely, fully filled beams and partially filled beams, and they used free vibration tests to determine that the equivalent natural frequencies and damping coefficients of the beams could be tuned by varying the magnetic field. Nagiredla et al. fabricated a sandwich cantilever beam with glass fiber as the face layer and MR fluid as the core, and they investigated the changes in the natural frequency and damping properties when varying the magnetic field applied to the fluid domain [
6]. Lahane investigated the field-dependent storage modulus and the loss factor of a cantilever sandwich beam consisting of an aluminum face material and a MR fluid core and compared the measured data to the calculated values from a 1-DOF lumped model [
7]. Srinivasa et al. presented experimental and computational results regarding the changes in both the damping property and the natural frequency of a fully filled MR fluid and a partially filled MR fluid between two aluminum face plates [
8]. Acharya et al. fabricated six different sandwich beams with different particle sizes and weight fractions of carbonyl iron powder (CIP). Through sinusoidal excitation tests, they determined that sandwich beams with a larger particle size and a higher weight fraction of CIP exhibited an increased damping ratio and vibration suppression [
9]. Vazquez and Kauffman proposed an updated analytical model to measure sandwich beams containing MR fluid as core materials, where the modal and transient properties were related to the stiffness of the shear modulus at various magnetic-field intensities [
10].
Manoharan et al. investigated the optimal locations of MR fluid pockets in partially treated laminated composite MR sandwich plates to achieve the maximum natural frequencies and loss factors, where a genetic algorithm combined with the finite element method was utilized to find the optimal locations [
11]. Manoharan et al. experimentally investigated the natural frequencies of fully and partially treated laminated composite MR sandwich plates by varying the intensity of the magnetic field, boundary conditions, and location of the MR fluid pocket [
12]. Arani et al. conducted vibration analysis of a viscoelastic sandwich plate consisting of a MR fluid core and nanocomposite face sheets featuring a piezoelectric matrix and functionally graded carbon nanotubes, where the influence of various parameters such as the core-to-face-sheet-thickness ratio and the magnetic field and volume fraction of iron particles on the dimensionless natural frequencies of the sandwich plate were identified [
13]. Kolekar et al. reviewed different types of sandwich beams, plates, and shells featuring MR fluid cores, where the modal characteristics of several specific beams and plates were presented with the effects of the magnetic field, the location of the MR fluid pocket, and the modal excitation [
14]. Eyvazian et al. considered the instability of sandwich plates consisting of a MR fluid core and piezoelectric-reinforced face sheets for vibration control using a proportional-derivative controller in which the sinusoidal shear deformation theory and the Hamilton principle according to piezo-elasticity theory were employed to calculate motion equations. These equations were solved to obtain the vibration and the modal-loss factor of the proposed sandwich plate with respect to the dimensions of the structure, the electromagnetic field, the damping of the structure, the viscoelastic environment, and the boundary conditions [
15]. Asgari et al. studied the aeroelastic instability of a partially treated MR sandwich panel in supersonic airflow using the linear first-order piston theory and the classical Hamilton principle, where the critical aerodynamic pressure was affected not only by the magnetic field strength, core, and constraining layer thicknesses but also by the configuration of the core [
16]. Aboutalebi et al. conducted comprehensive analysis of the nonlinear vibratory behavior of circular, annular, and sector sandwich panels containing a MR fluid as the core layer, where a finite element method based on the von Karman formulation was used to evaluate the effects of the post-yield behavior of the MR fluid on nonlinear vibration suppression under various magnetic fields [
17,
18].
Wang et al. investigated the vibration characteristics of a rotating sandwich beam featuring MR fluid as a core layer using the finite element method and the Hamilton principle and found that the natural frequency of the beam increased as the rotation speed and magnetic field strength increased, while the modal-loss factor decreased as the rotation speed decreased [
19]. Wei et al. investigated the dynamic properties and vibration-suppression capabilities of an axially moving sandwich beam with a MR fluid core using the linear viscoelasticity theory, where the effects of the speed of the axial movement, the axial force, the applied magnetic field, and the skin-core-thickness ratio on the capabilities of the beam for natural frequency suppression were considered [
20]. Arani et al. investigated the modeling and vibration analysis of double sandwich beams coupled by a visco-Pasternak medium, where the material properties of the MR fluid were obtained from experimental data, and the material properties of the carbon nanotube/fiber composite face sheets were obtained from the Halpin–Tsai model [
21]. Hemmatian (
Figure 3) investigated the sound-transmission loss capability of sandwich panels treated with MR-fluid cores at low frequencies. The sound transmission behavior of MR-based circular sandwich panels was investigated through the development of efficient numerical models, and the topology optimization of sandwich panels partially treated with MR fluid and a silicone rubber core layer was considered [
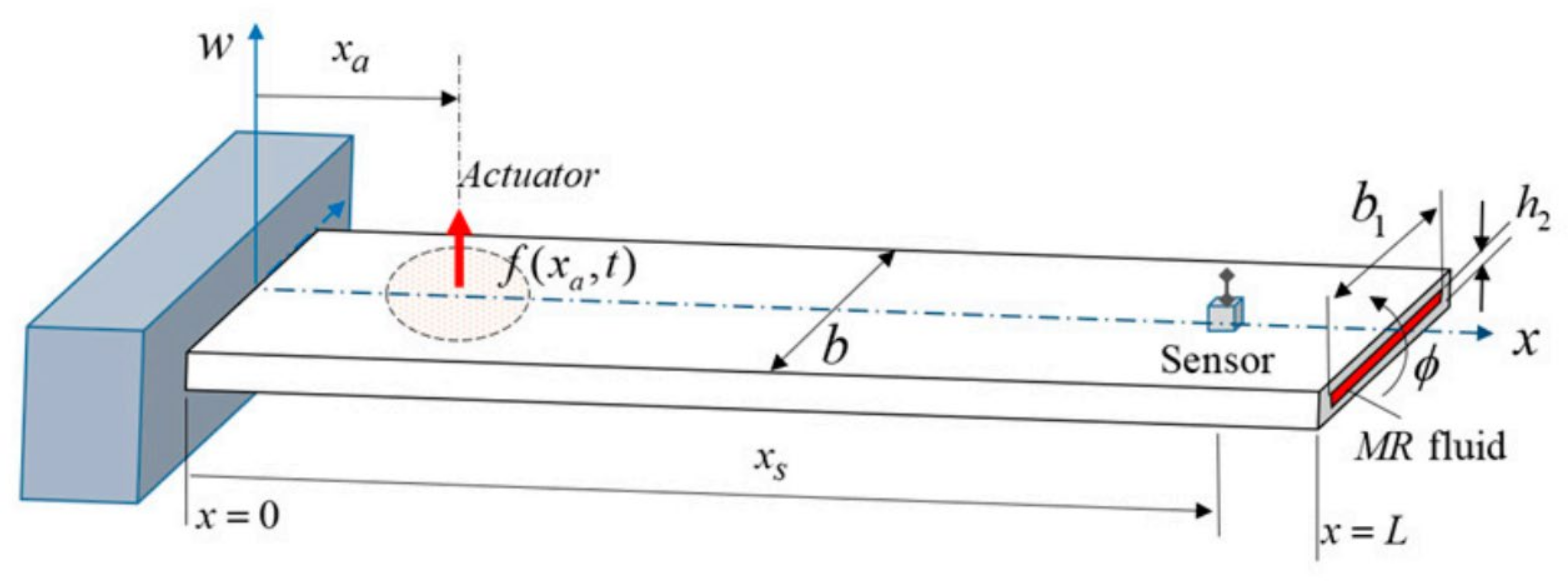
22]. Bolat and Sivrioglu (
Figure 4) proposed a novel active control structure to suppress the vibrations of a small-scale wind turbine blade filled with a MR fluid core. In
Figure 4,
h1 is the wall thickness of the equivalent beam;
h2 is the MR fluid layer thickness;
b is the width of the beam; and
xa and
xs are the length from the wall to the actuator and the sensor position, respectively. A dynamic interaction model between the MR fluid and the electromagnetic actuator was constructed to obtain a force relationship, and the H2/H-inf controller was experimentally implemented [
23]. Nezami and Gholami studied the optimal locations of a finite number of embedded MR fluid pockets using a single-objective genetic algorithm to suppress the supersonic flutter of an elastically supported sandwich beam with a regular honeycomb interlayer to achieve the optimal compromise between mass and flutter suppression, where the best number of MR pockets and optimal magnetic field values in a honeycomb sandwich structure were determined [
24]. Eshaghi investigated the aeroelastic stability of sandwich plates containing MR fluid as a core layer under supersonic airflow, where the effects of the MR fluid, the magnetic field, the boundary conditions, and the plate parameters on the flutter boundaries of sandwich MR plates were analyzed [
25]. Ebrahimi and Sedighi studied the wave propagation of a rectangular sandwich composite plate containing a tunable MR fluid core, and it was determined that the magnetic field intensity was the most significant factor for changing the wave frequency and the phase velocity of the propagated waves [
26].
Table 1 summarizes many different recent studies on MR fluid sandwich structures.
5. Conclusions
In this review article, numerous multi-DOF MR applications including MR sandwich structures, MR dampers, MR mounts, MR brakes, and MR clutches were adopted and discussed. Based on the inherent and salient properties of MR fluid, the research progress in the development of MR applications has become very fast, and the research topics are still active and attractive. This review identified that an appropriate design configuration, modeling, and control approach are crucial factors in the commercial development of advanced MR-fluid-application devices and systems. Among the many design requirements for successful practical realization or commercialization of MR application systems, geometry configurations, working principles, dynamic modeling, and control approaches must be carefully considered, and this point has been emphasized in this review article. In addition, this review article described the inherent advantages and disadvantages of each MR application to be explored more in the future. Consequently, the comprehensive discussion on various multi-DOF dynamic systems presented in this review article will provide very useful guidelines to create and develop more advanced multi-DOF MR-fluid-application systems in various fields including automotive, civil, and medical engineering.










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}