
A Variable Stiffness Actuator Based on Leaf Springs: Design, Model and Analysis



Abstract
1. Introduction
2. Composition and Configuration Design
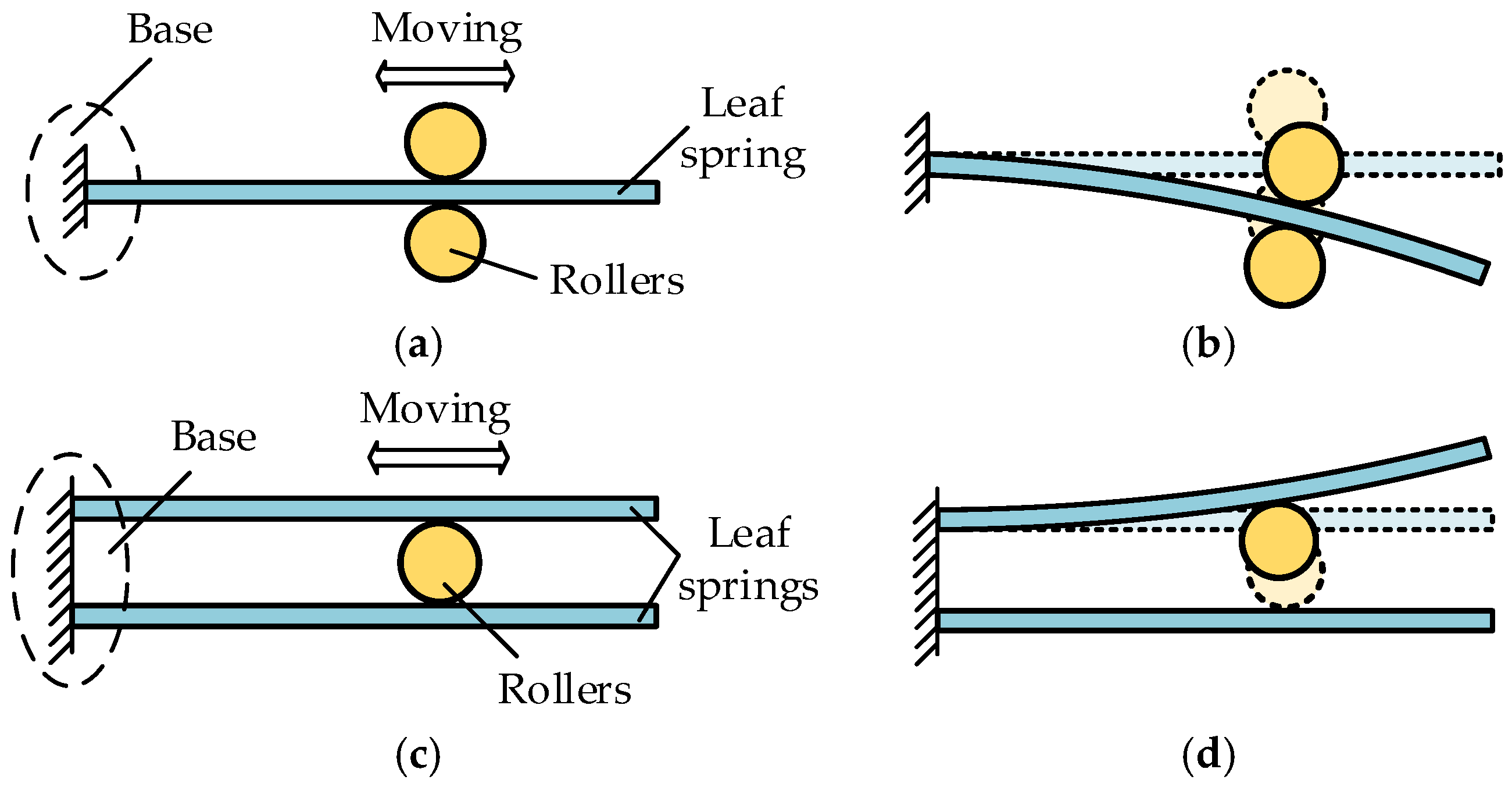
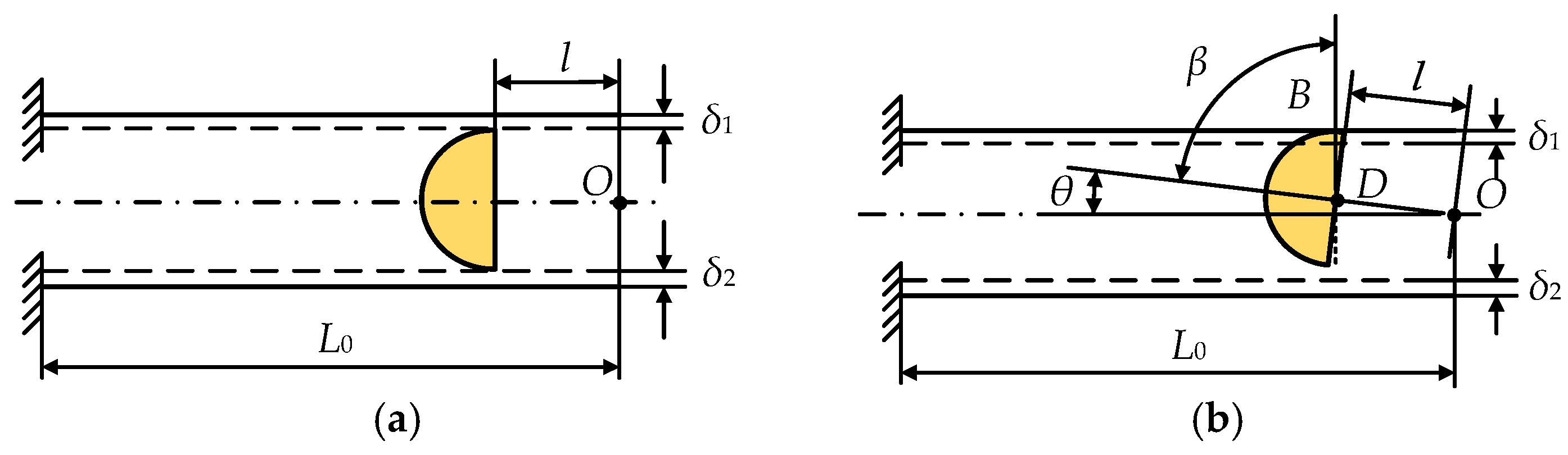
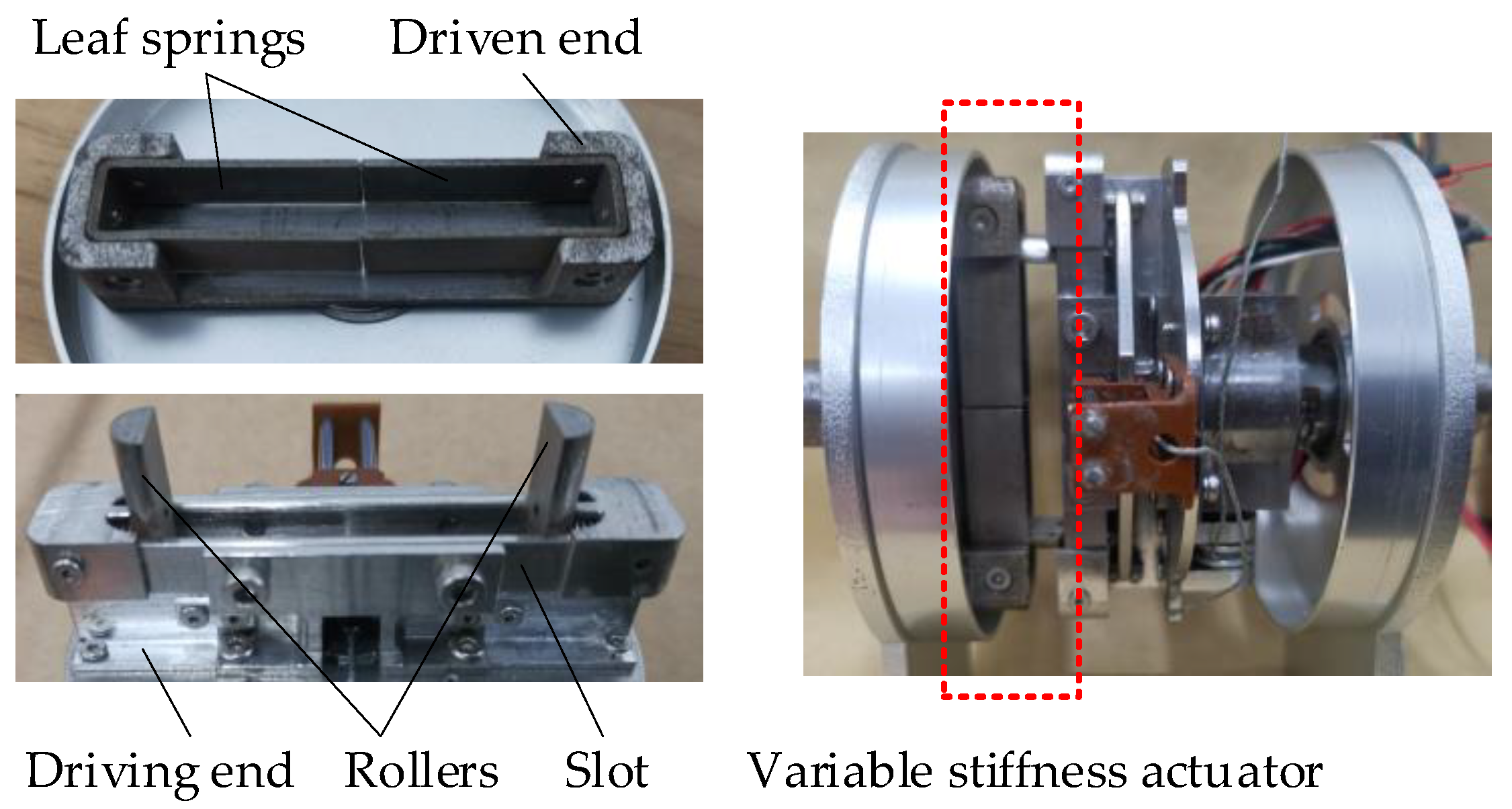
2.1. Arrangement of Leaf Springs and Rollers
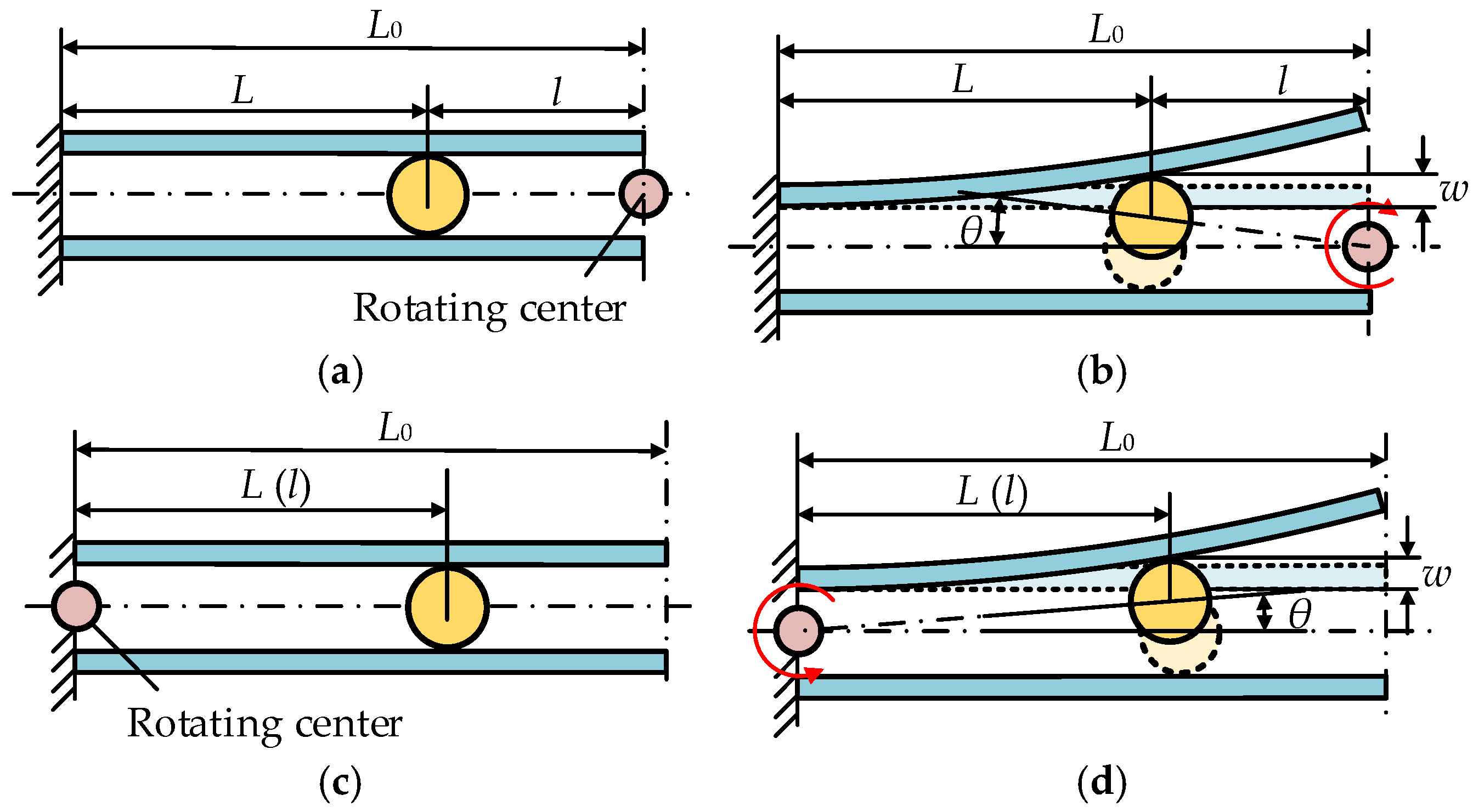
2.2. Position of the Rotating Center
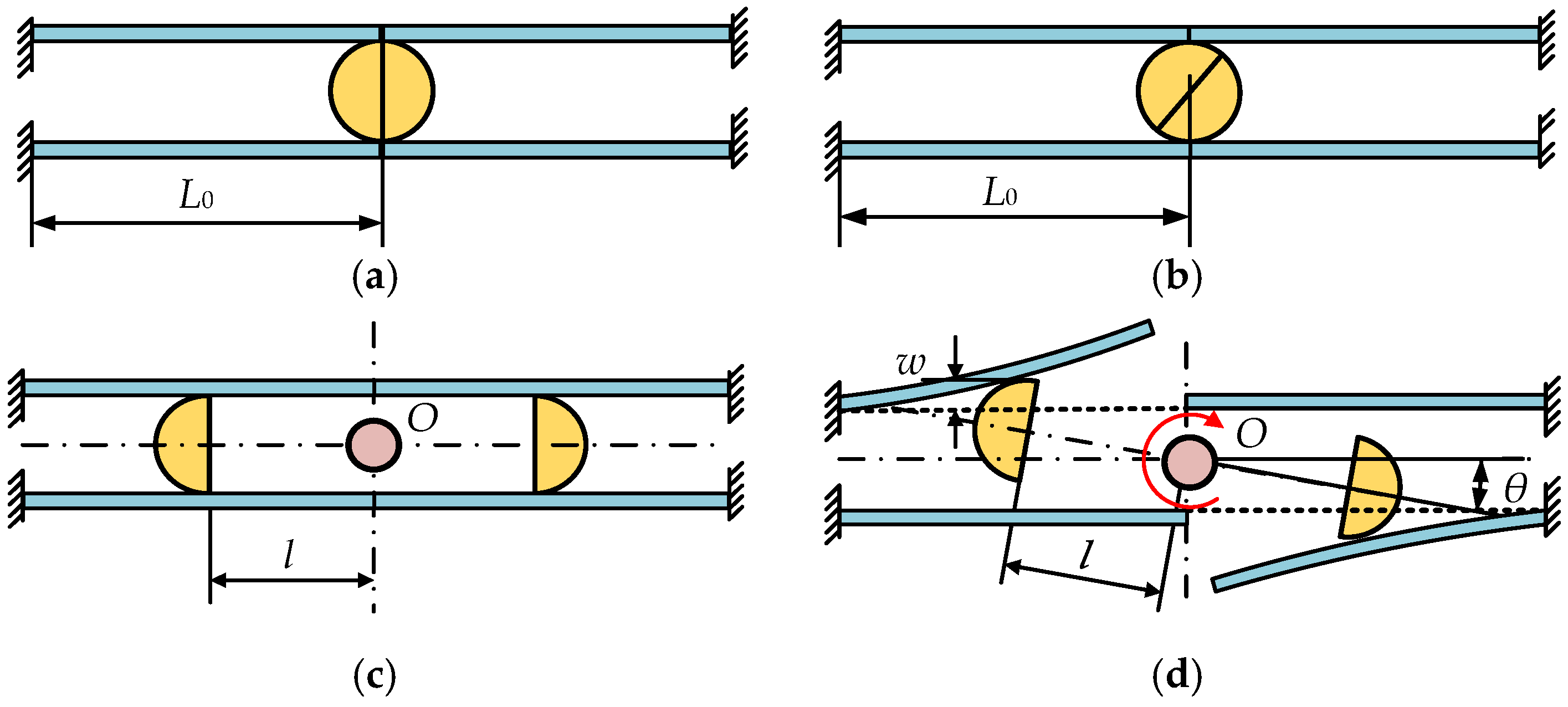
2.3. Spatial Arrangement of the Actuator
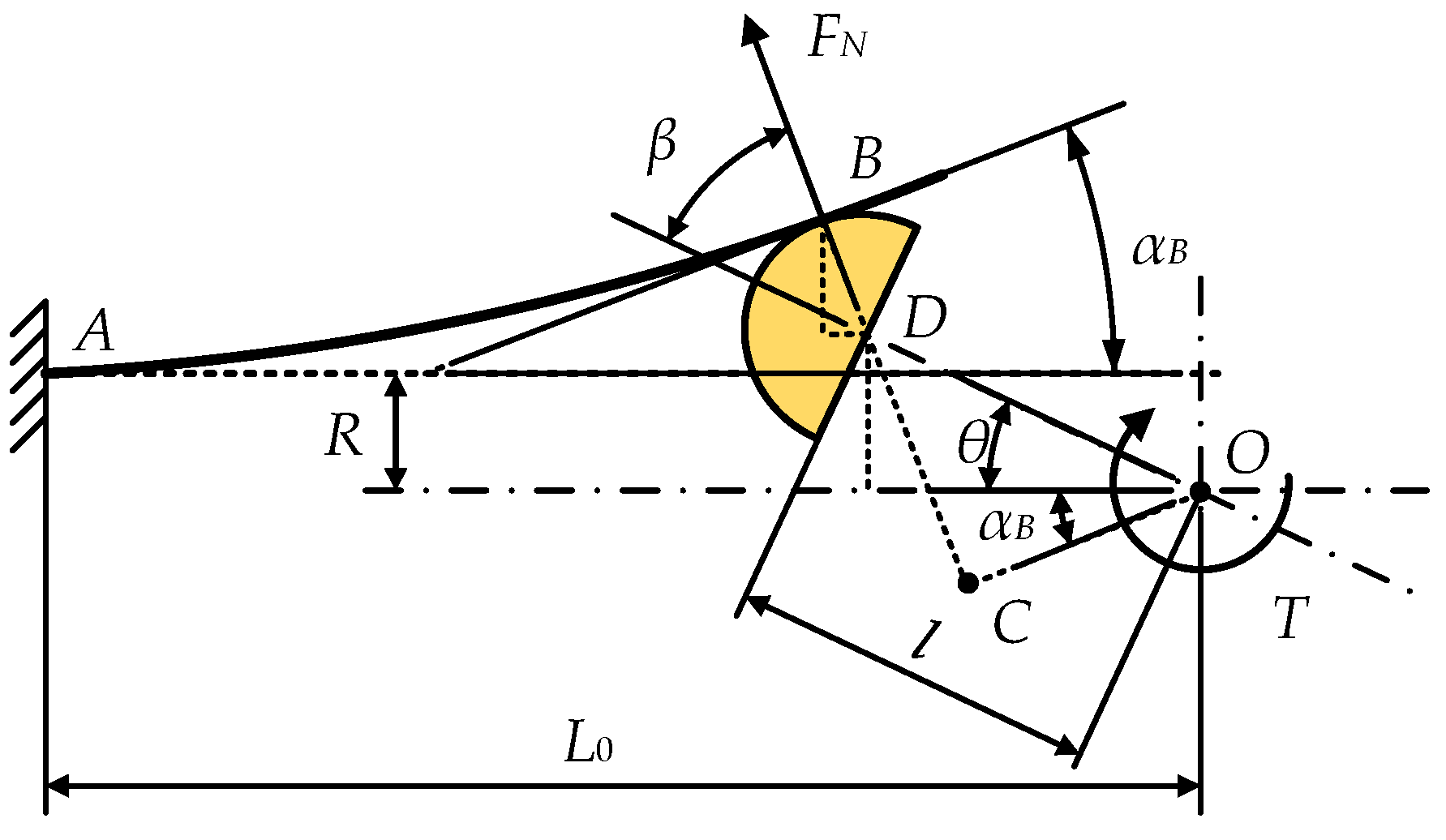
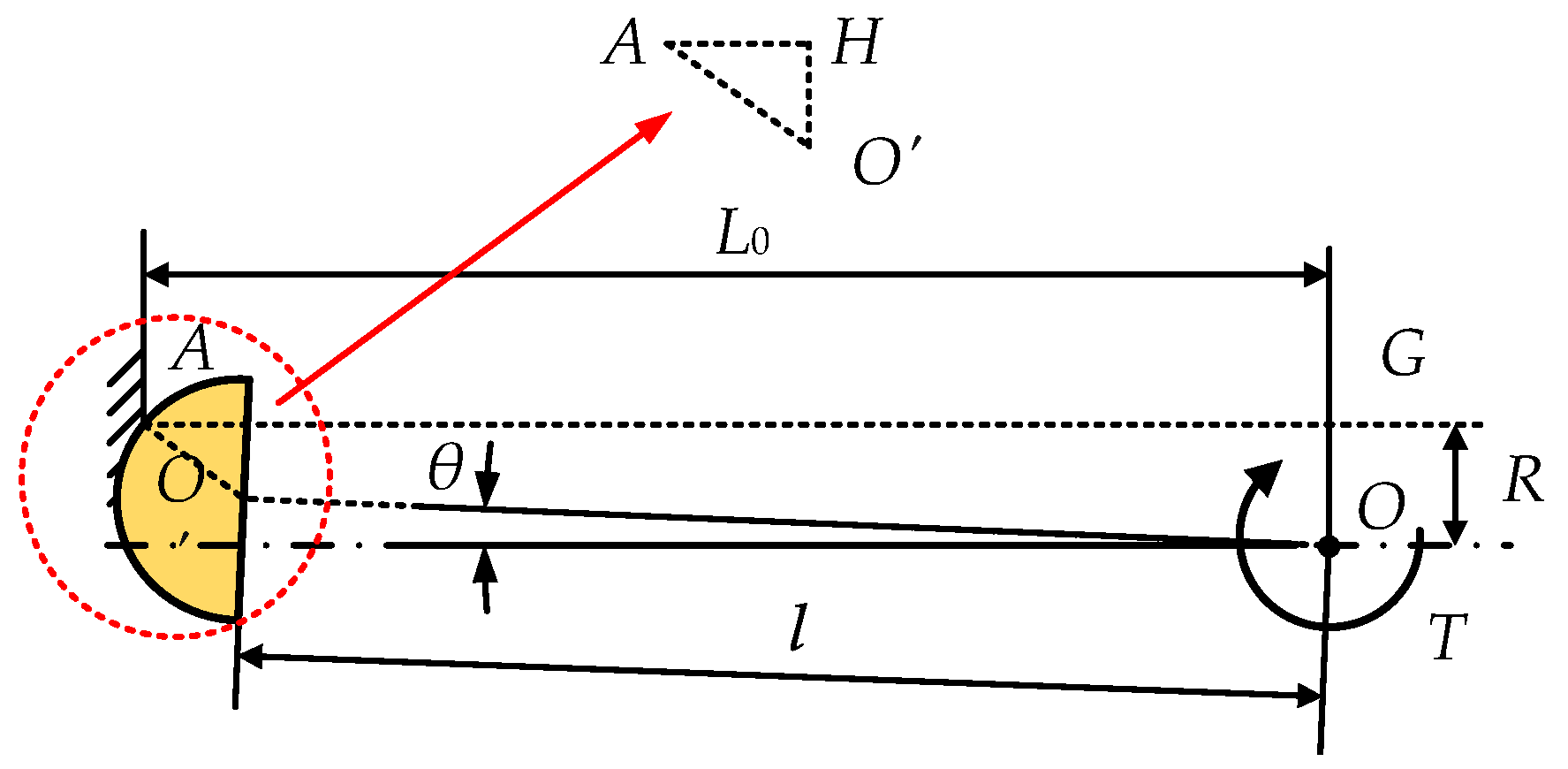
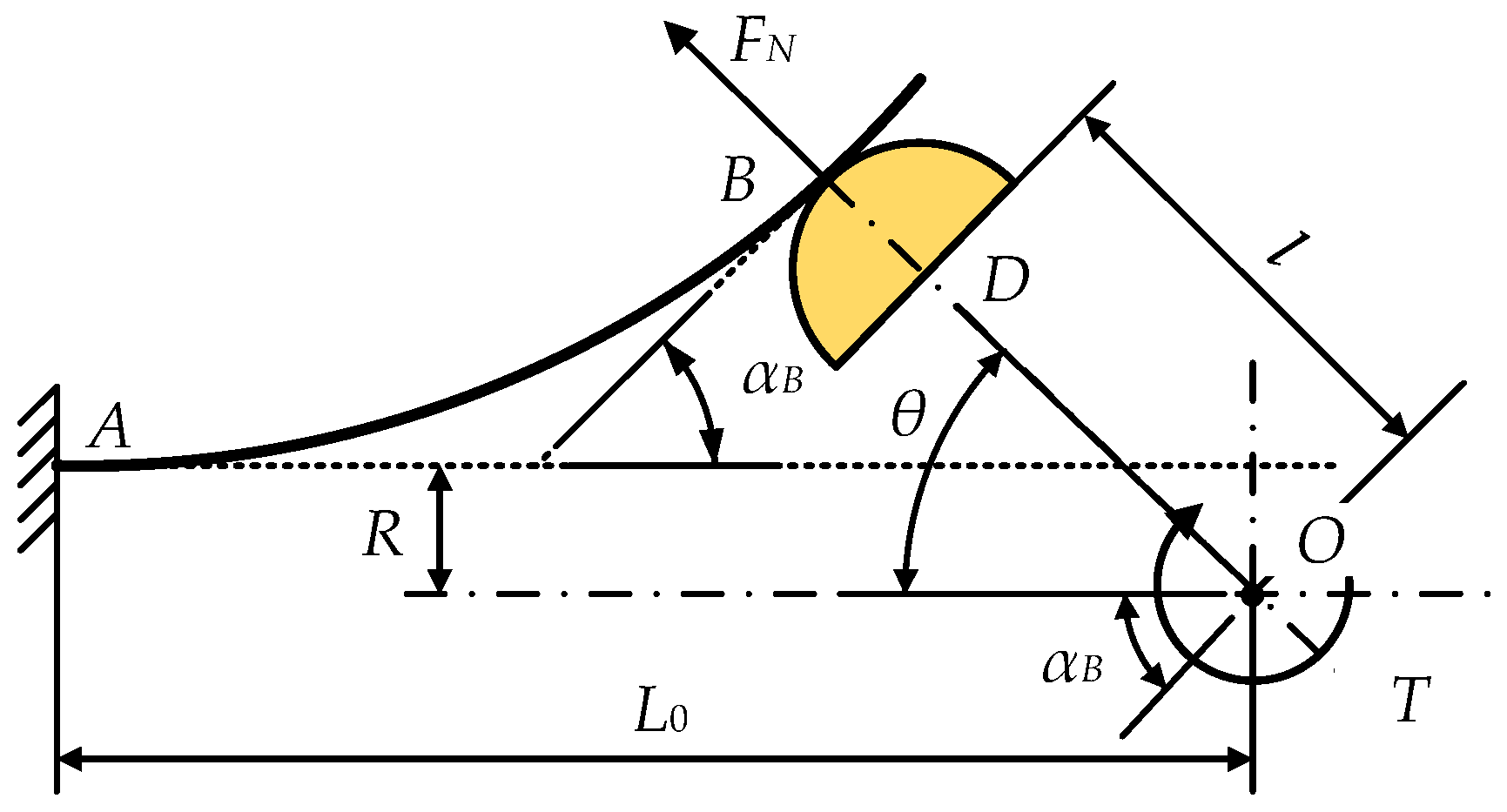
3. Mechanical Modeling and Analysis
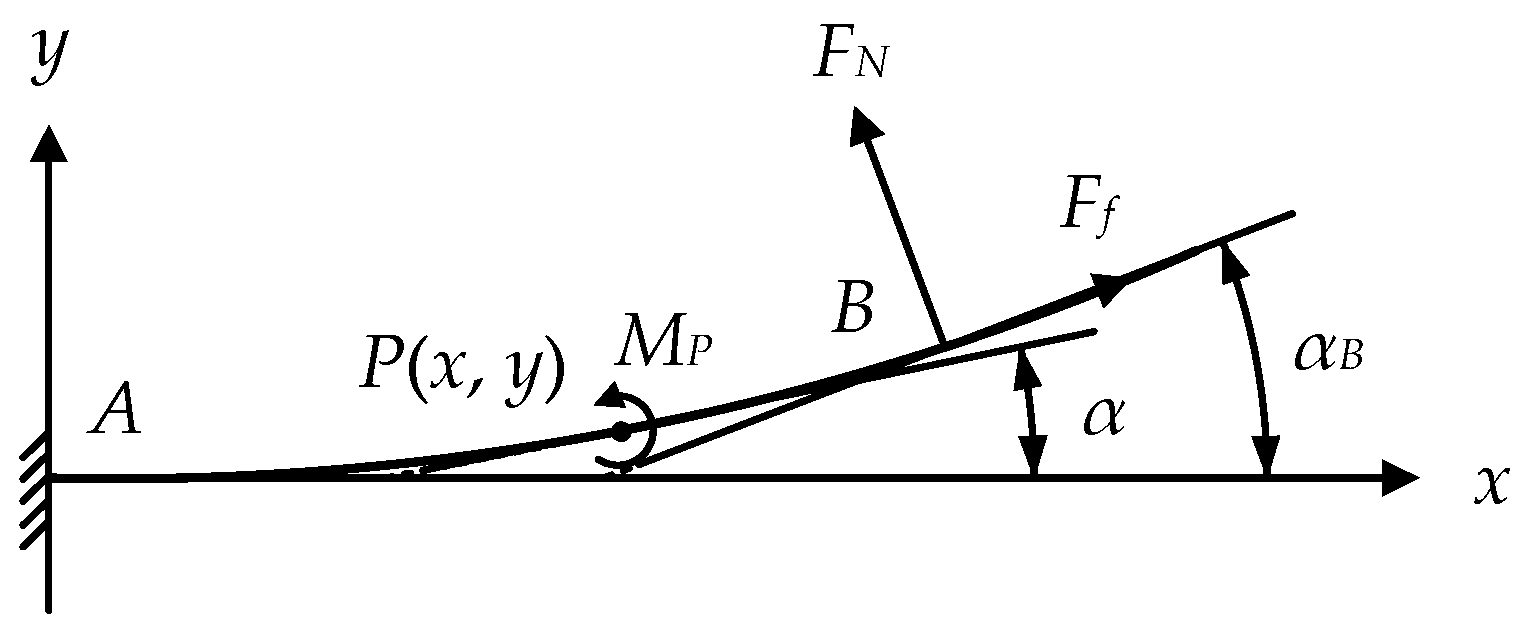
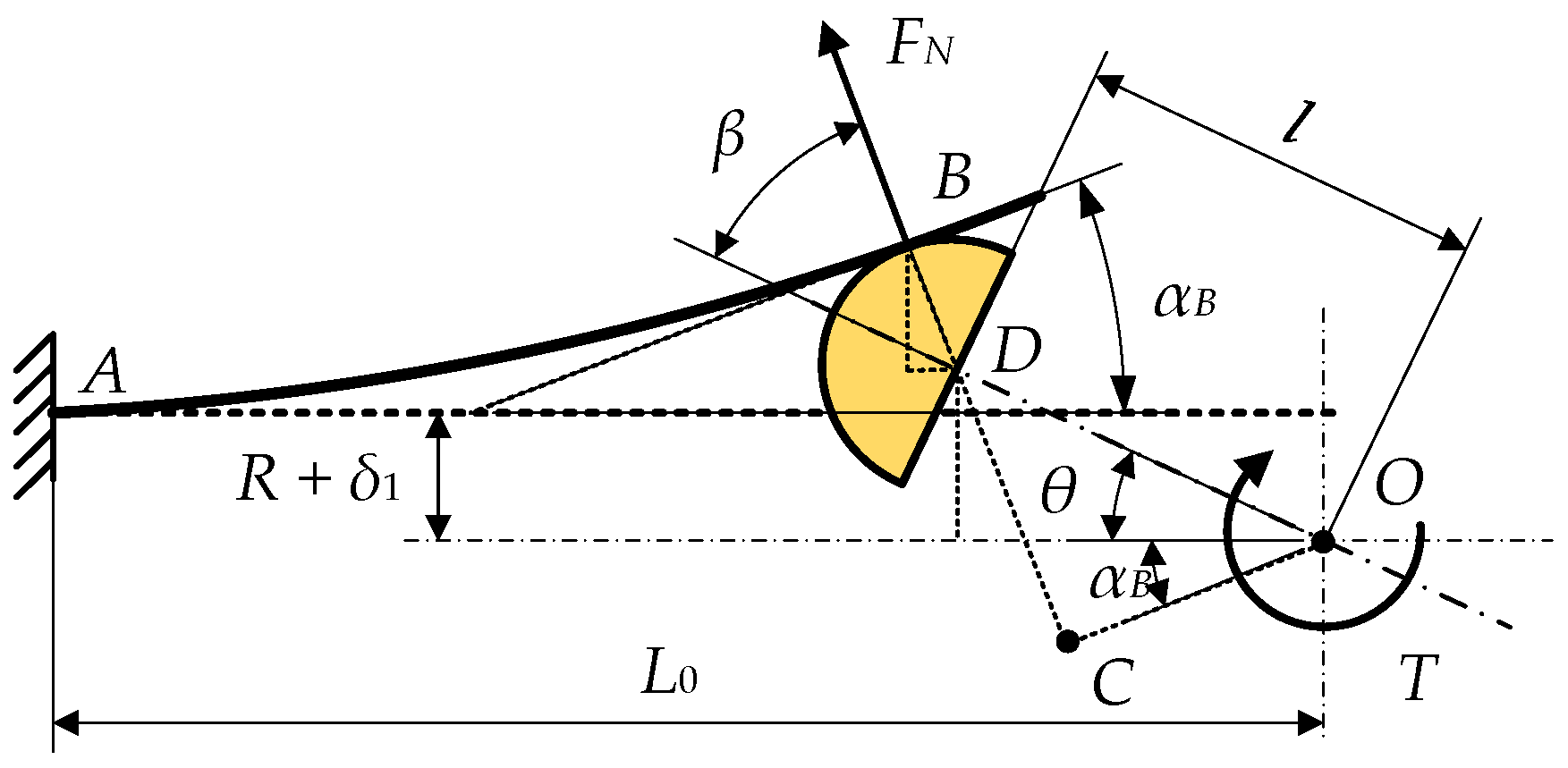
3.1. Rotational Stiffness Model

3.2. Safe Position Space
3.2.1. Ultimate Position of the Roller under Geometric Constraints
- 1.
- 2.
3.2.2. Ultimate Position of the Roller Not separated from the Leaf Spring
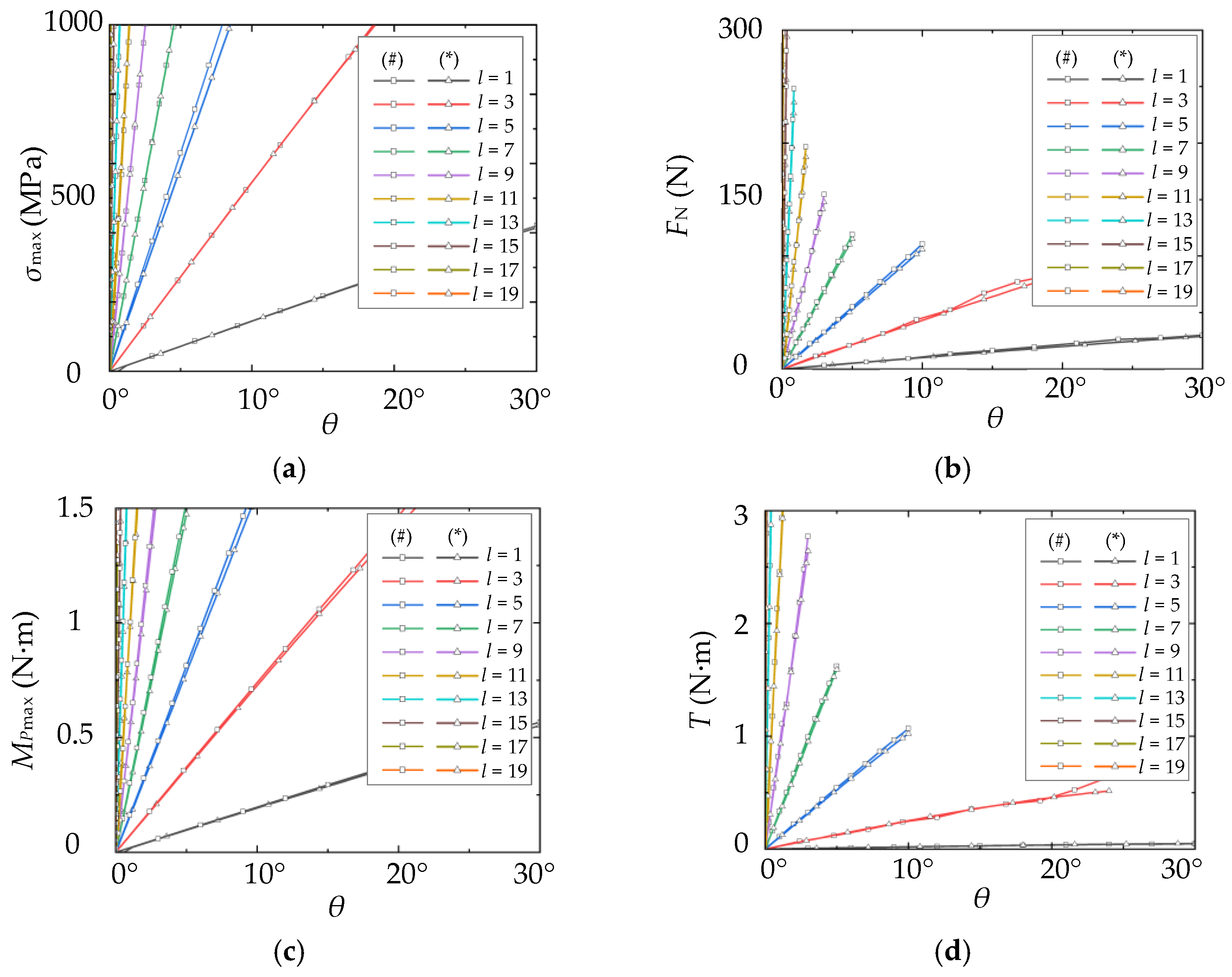
3.2.3. Ultimate Deformation of the Leaf Spring under the Constraint of Strength
4. Stiffness-Adjusting Characteristics
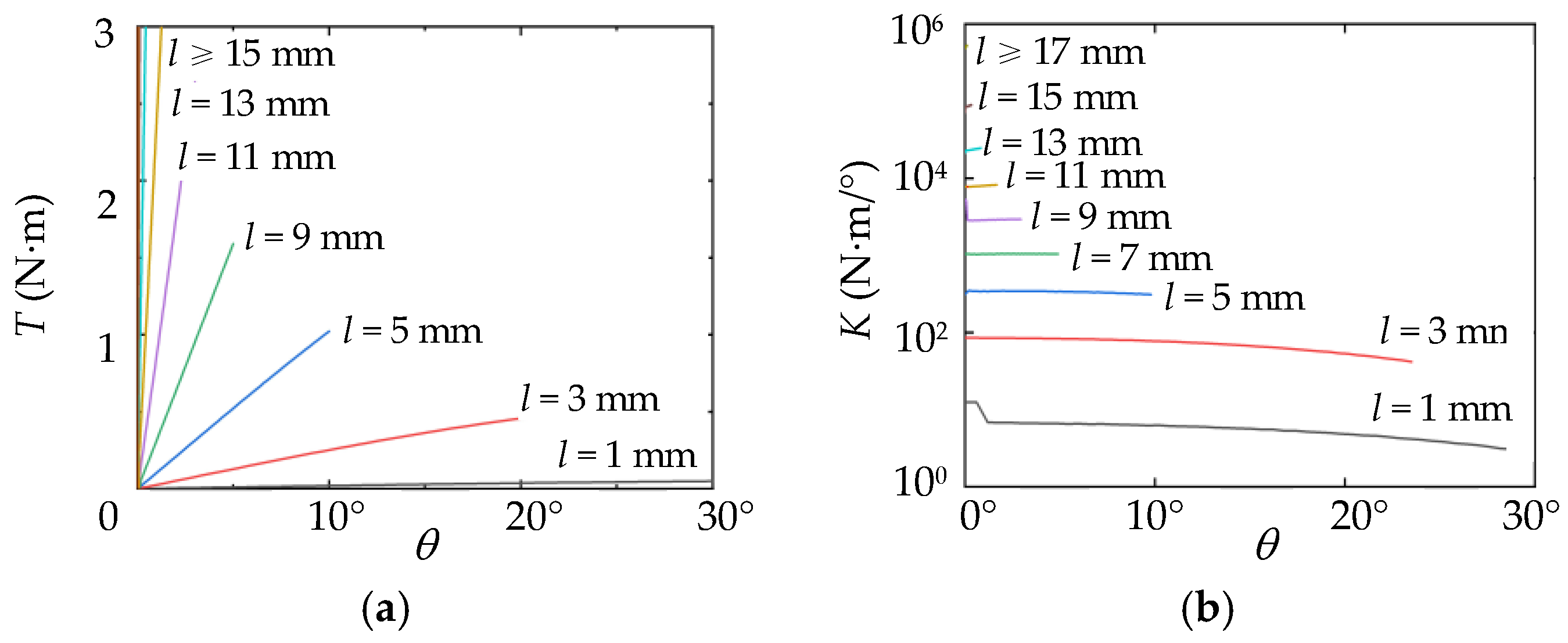
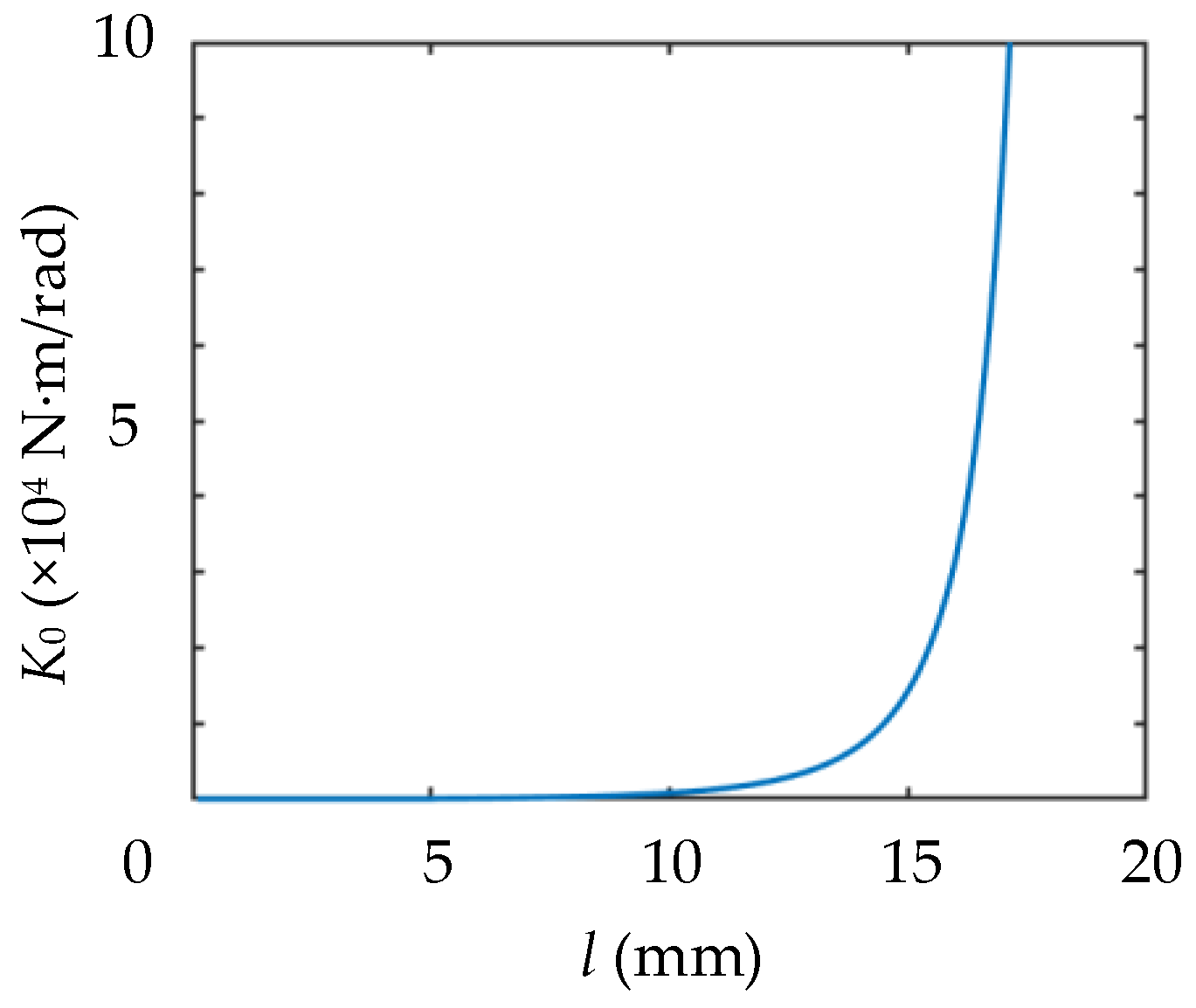
4.1. Changing Laws of Stiffness
4.2. Influence of Structural Parameters on the Characteristics of Adjusting Stiffness
4.2.1. The Thickness h and Width b of the Cantilever Leaf Spring
4.2.2. The Modulus E of the Cantilever Leaf Spring
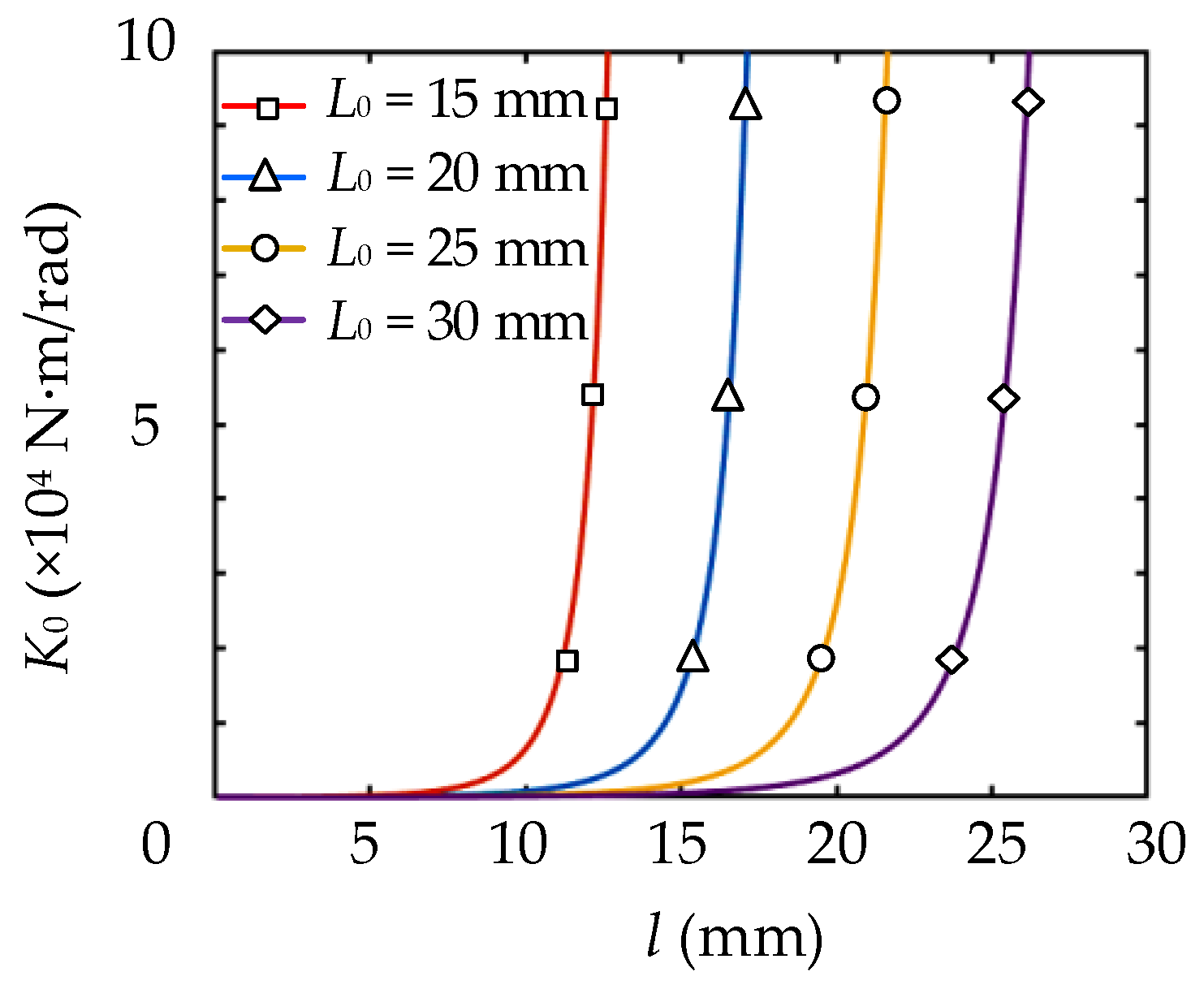
4.2.3. The Length of the Cantilever Leaf Spring L0
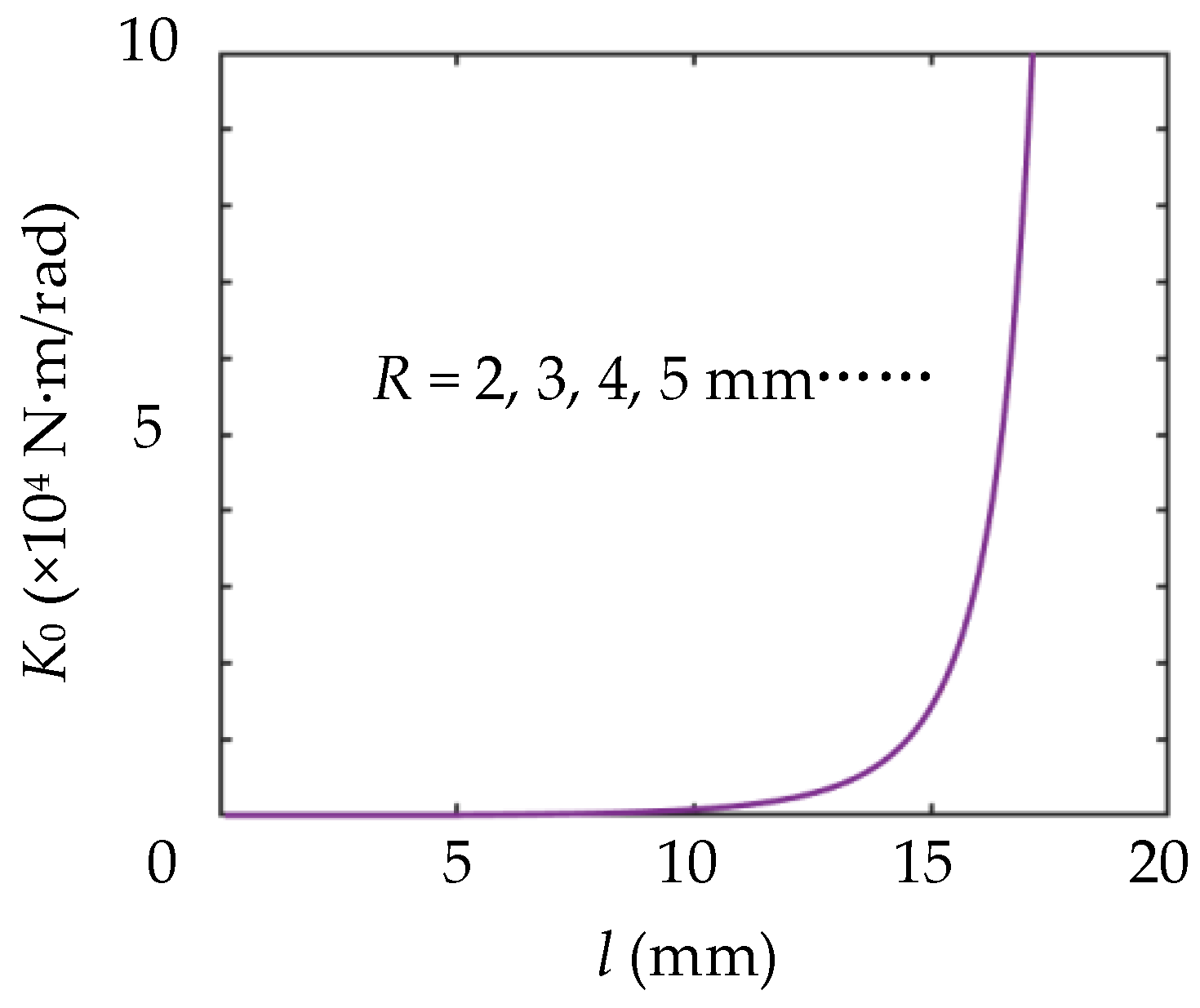
4.2.4. Roller Radius R
4.3. Influence of Clearance on the Characteristics of Adjusting the Stiffness
- 1.
- ;
- 2.
- ;

5. Static Simulation and Test
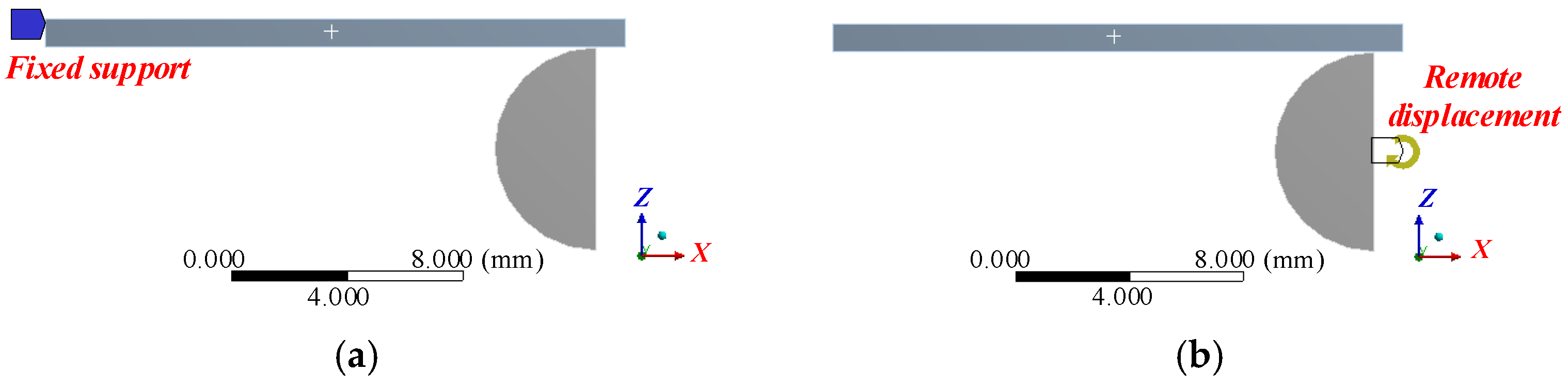
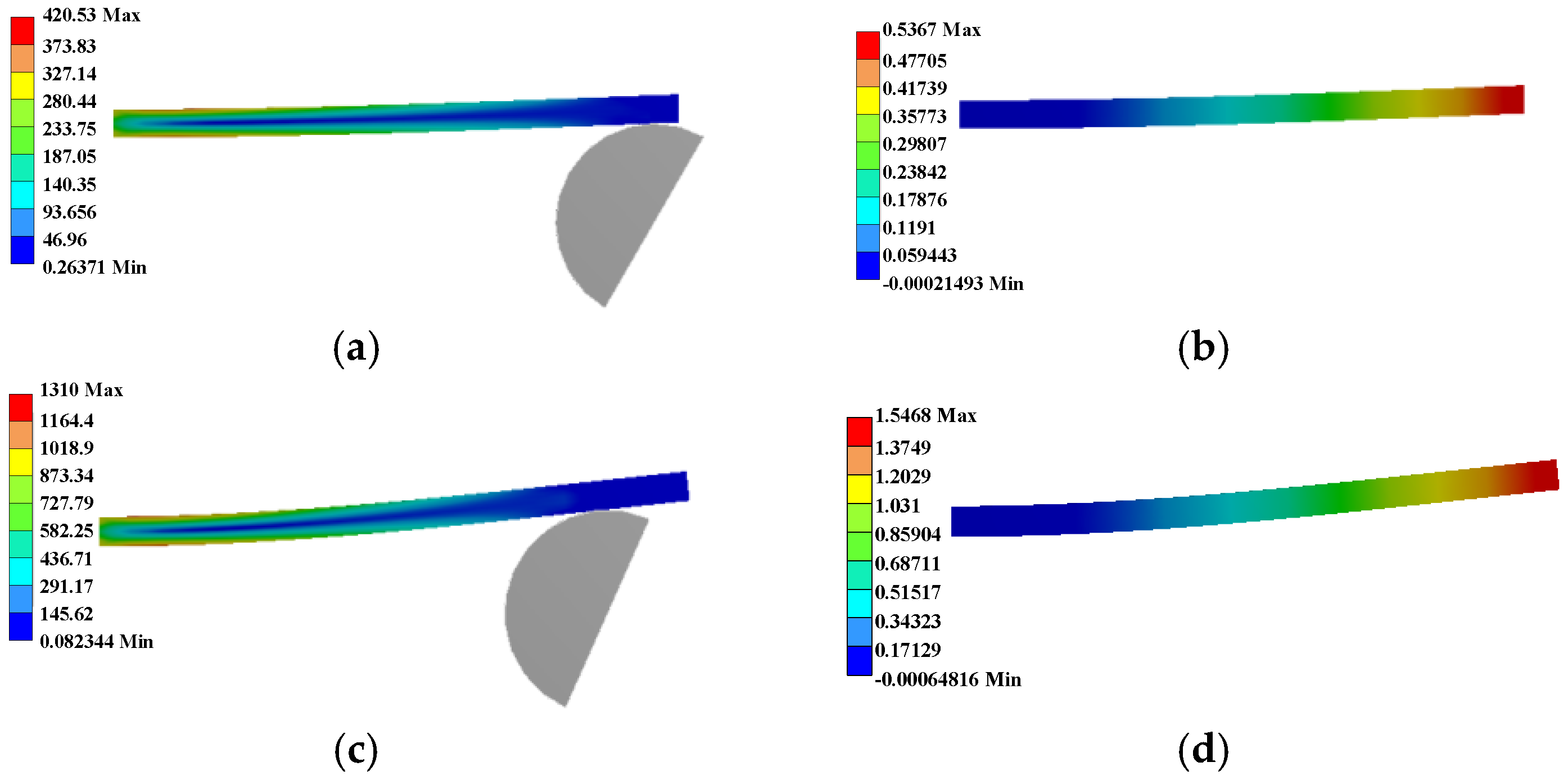
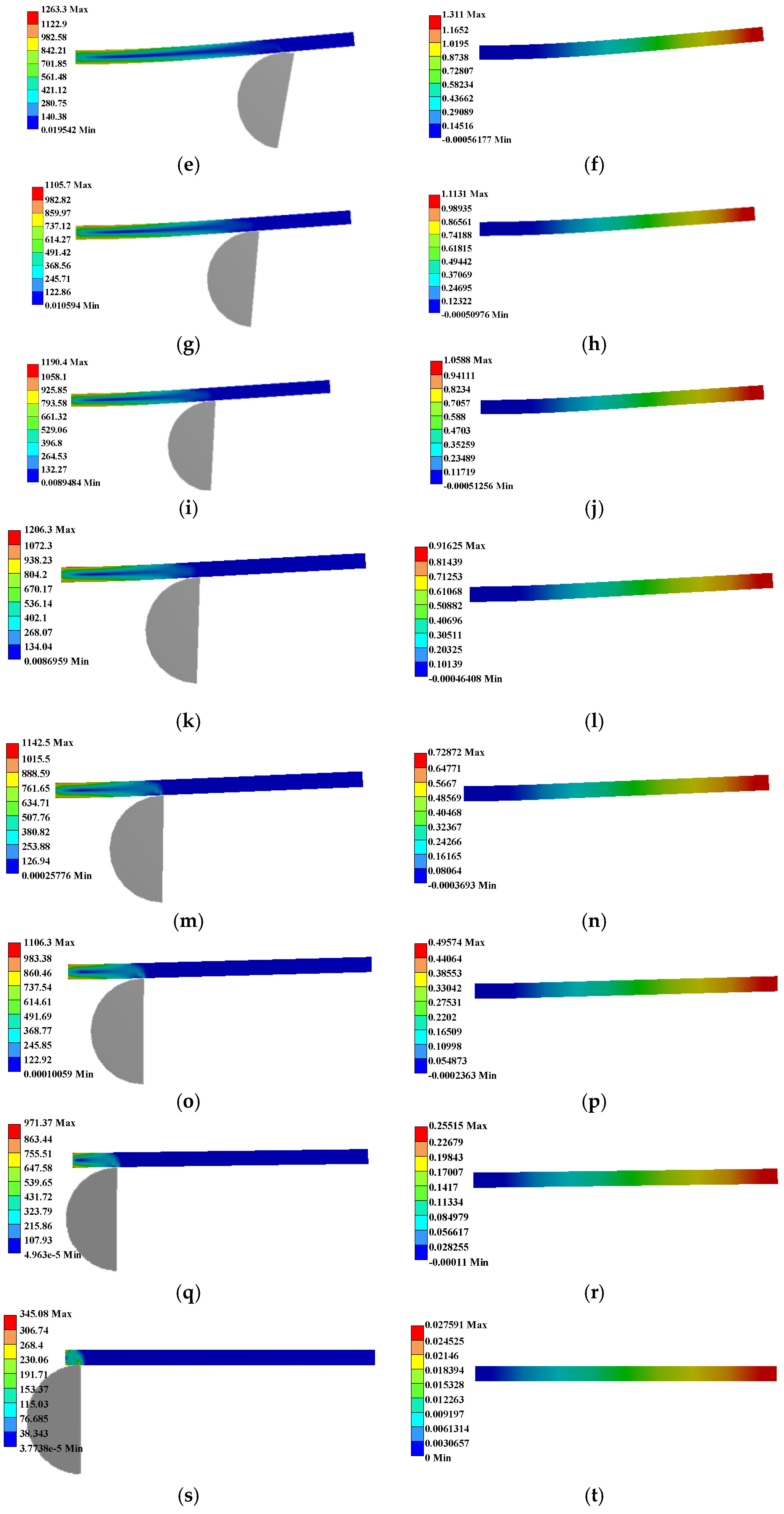
5.1. Finite Element Simulation
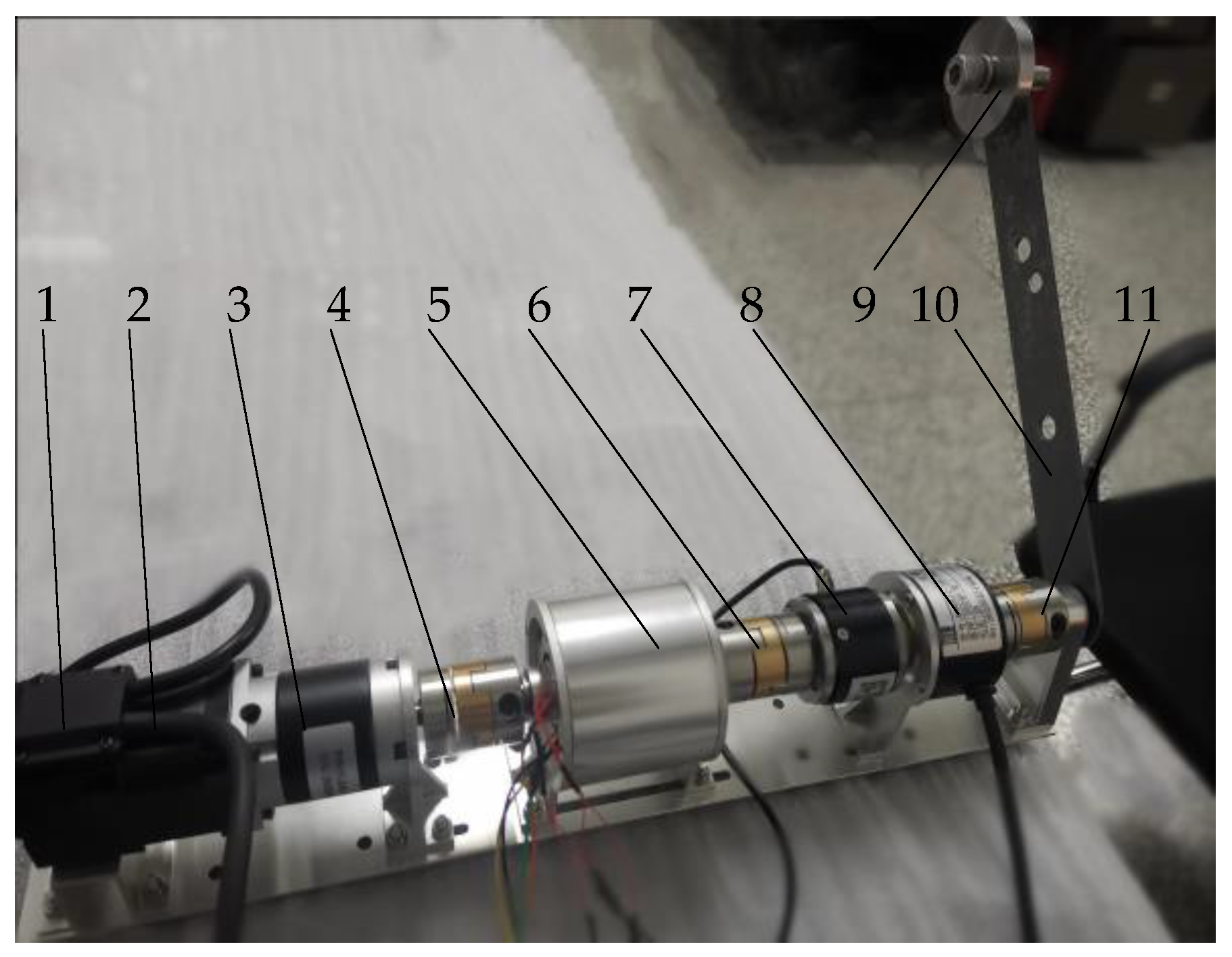
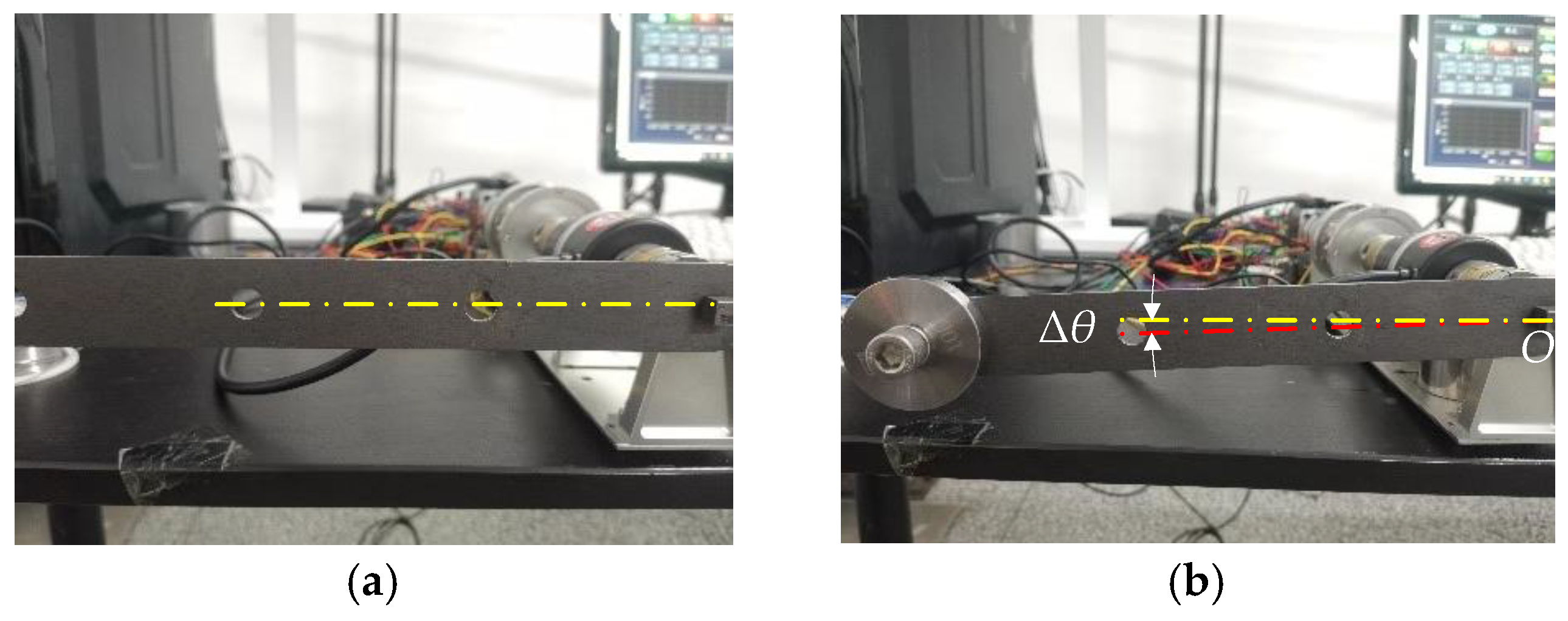
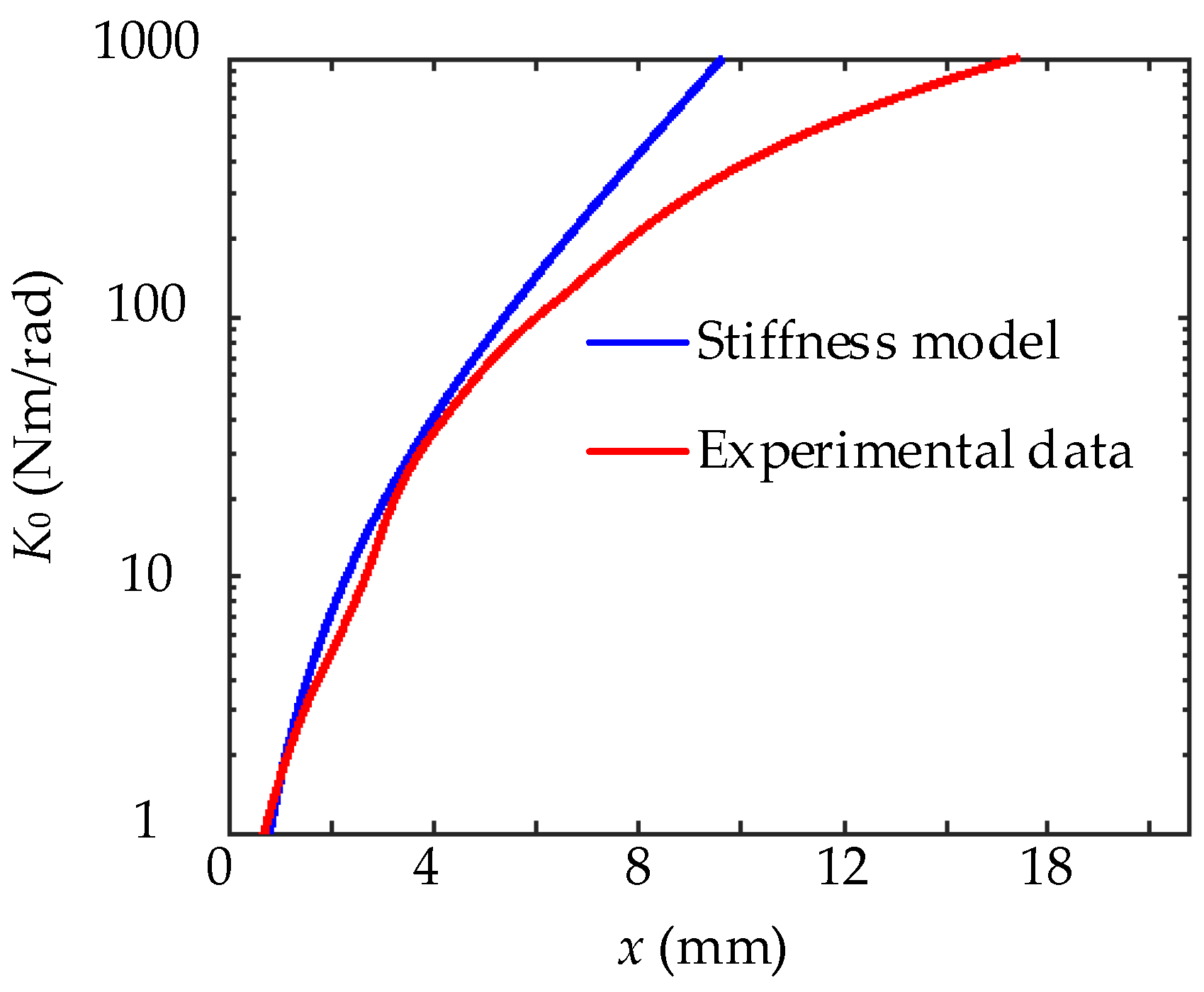
5.2. Identification Test of Static Stiffness
- (1)
- The long transmission path of the test bed leads to greater flexibility of the system, which makes the measured value of stiffness smaller than the actual value.
- (2)
- The resolution of the encoder is not enough to identify the minimal angular displacement, so that the encoder cannot truly reflect the angular deformation when the stiffness is high.

6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A. Detailed Solution of Mechanical Modelling
- Appendix A.1: Coordinates of point B(xB, yB)
- Appendix A.2: F1(αB) and F2(αB)
References
- Siddaramaiah, V.H.; Calderon, D.E.; Cooper, J.E.; Wilson, T. Preliminary Studies in the Use of Folding Wing-Tips for Loads Alleviation. In Proceedings of the Royal Aeronautical Society Aerodynamics Conference, Bristol, UK, 22–24 July 2014; pp. 724–737. [Google Scholar]
- Wen, M.; Yu, M.; Fu, J.; Wu, Z.; Cui, J.; Tan, J.; Wen, X. Multi-Functional Hinge Equipped with A Magneto-Rheological Rotary Damper for Solar Array Deployment System. In Proceedings of the SPIE-The International Society for Optical Engineering, Changsha/Zhangjiajie, China, 6 March 2015; p. 944648. [Google Scholar]
- Guo, J.; Tian, G. Mechanical Design and Analysis of the Novel 6-DOF Variable Stiffness Robot Arm Based on Antagonistic Driven Joints. J. Intell. Robot. Syst. 2015, 82, 207–235. [Google Scholar] [CrossRef]
- Tang, D.; Dowell, E.H. Theoretical and Experimental Aeroelastic Study for Folding Wing Structures. J. Aircr. 2008, 45, 1136–1147. [Google Scholar] [CrossRef]
- He, J.; Zhang, Y.; Shangguan, Z.; Yang, L. A Review of Bionic Design in Satellite Solar Wing Structures. J. Phys. Conf. Ser. 2020, 1549, 042099. [Google Scholar] [CrossRef]
- Choi, J.; Park, S.; Lee, W.; Kang, S. Design of a Robot Joint with Variable Stiffness. In Proceedings of the 2008 IEEE International Conference on Robotics and Automation, Pasadena, CA, USA, 19–23 May 2008; pp. 1760–1765. [Google Scholar]
- Hyun, M.W.; Yoo, J.; Hwang, S.T.; Choi, J.H.; Kang, S.; Kim, S.-J. Optimal Design of a Variable Stiffness Joint Using Permanent Magnets. IEEE Trans. Magn. 2007, 43, 2710–2712. [Google Scholar] [CrossRef]
- Boehler, Q.; Vedrines, M.; Abdelaziz, S.; Poignet, P.; Renaud, P. Design and Evaluation of a Novel Variable Stiffness Spherical Joint with Application to MR-Compatible Robot Design. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 661–667. [Google Scholar] [CrossRef]
- Sun, Y.; Tang, P.; Dong, D.; Zheng, J.; Chen, X.; Bai, L. Modeling and Experimental Evaluation of a Pneumatic Variable Stiffness Actuator. IEEE/ASME Trans. Mechatron. 2021, 1–12. [Google Scholar] [CrossRef]
- Kajikawa, S.; Ito, T.; Hase, H. Stiffness Control of Variable Stiffness Joint Using Electromyography Signals. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, 6–10 May 2013; pp. 4928–4933. [Google Scholar] [CrossRef]
- Kajikawa, S.; Yonemoto, Y. Joint Mechanism with a Multi-Directional Stiffness Adjuster. In Proceedings of the 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems, Taipei, Taiwan, 18–22 October 2010; pp. 4194–4200. [Google Scholar]
- Heepe, L.; Gorb, S.N. Biologically Inspired Mushroom-Shaped Adhesive Microstructures. Annu. Rev. Mater. Sci. 2014, 44, 173–203. [Google Scholar] [CrossRef]
- Huber, G.; Gorb, S.N.; Spolenak, R.; Arzt, E. Resolving the Nanoscale Adhesion of Individual Gecko Spatulae by Atomic Force Microscopy. Biol. Lett. 2005, 1, 2–4. [Google Scholar] [CrossRef]
- Hauser, S.; Robertson, M.; Ijspeert, A.; Paik, J. JammJoint: A Variable Stiffness Device Based on Granular Jamming for Wearable Joint Support. IEEE Robot. Autom. Lett. 2017, 2, 849–855. [Google Scholar] [CrossRef]
- Li, Y.; Chen, Y.; Yang, Y.; Wei, Y. Passive Particle Jamming and Its Stiffening of Soft Robotic Grippers. IEEE Trans. Robot. 2017, 33, 446–455. [Google Scholar] [CrossRef]
- Li, J.; Zhong, G.; Yin, H.; He, M.; Tan, Y.; Li, Z. Position control of a robot finger with variable stiffness actuated by shape memory alloy. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May 2017–3 June 2017; pp. 4941–4946. [Google Scholar] [CrossRef]
- Chautems, C.; Tonazzini, A.; Floreano, D.; Nelson, B.J. A Variable Stiffness Catheter Controlled with an External Magnetic Field. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; pp. 181–186. [Google Scholar] [CrossRef]
- Zhao, J.; Niu, J.; McCoul, D.; Leng, J.; Pei, Q. A Rotary Joint for a Flapping Wing Actuated by Dielectric Elastomers: Design and Experiment. Meccanica 2015, 50, 2815–2824. [Google Scholar] [CrossRef]
- Wen, W.; Huang, X.; Sheng, P. Electrorheological Fluids: Structures and Mechanisms. Soft Matter 2007, 4, 200–210. [Google Scholar] [CrossRef] [PubMed]
- Bahl, S.; Nagar, H.; Singh, I.; Sehgal, S. Smart Material Types, Properties and Applications: A Review. Mater. Today Proc. 2020, 28, 1302–1306. [Google Scholar] [CrossRef]
- Nikitczuk, J.; Weinberg, B.; Canavan, P.K.; Mavroidis, C. Active Knee Rehabilitation Orthotic Device with Variable Damping Characteristics Implemented via an Electrorheological Fluid. IEEE/ASME Trans. Mechatron. 2009, 15, 952–960. [Google Scholar] [CrossRef]
- Davidson, J.R.; Krebs, H.I. An Electrorheological Fluid Actuator for Rehabilitation Robotics. IEEE/ASME Trans. Mechatron. 2018, 23, 2156–2167. [Google Scholar] [CrossRef]
- Wei, W.; Cai, S.; Bian, G.; Bao, G.; Yu, J.; Yang, D.; Zhang, L. Control of Compliant Joint Based on Magneto-rheological Fluid Coupling Transmission. In Proceedings of the 2019 IEEE 4th International Conference on Advanced Robotics and Mechatronics (ICARM), Toyonaka, Japan, 3–5 July 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Mao, Z.; Iizuka, T.; Maeda, S. Bidirectional Electrohydrodynamic Pump with High Symmetrical Performance and Its Application to a Tube Actuator. Sens. Actuators A Phys. 2021, 332, 113168. [Google Scholar] [CrossRef]
- Mao, Z.; Asai, Y.; Yamanoi, A.; Seki, Y.; Wiranata, A.; Minaminosono, A. Fluidic Rolling Robot Using Voltage-Driven Oscillating Liquid. Smart Mater. Struct. 2022, 31, 1–10. [Google Scholar] [CrossRef]
- Awad, M.I.; Gan, D.; Cempini, M.; Cortese, M.; Vitiello, N.; Dias, J.; Dario, P.; Seneviratne, L. Modeling, design & character-ization of a novel passive variable stiffness joint (pVSJ). In Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, Korea, 9–14 October 2016; pp. 323–329. [Google Scholar]
- Jafari, A.; Tsagarakis, N.G.; Caldwell, D.G. AwAS-II: A New Actuator with Adjustable Stiffness Based on the Novel Principle of Adaptable Pivot Point and Variable Lever Ratio. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 4638–4643. [Google Scholar]
- Yin, P.; Li, M.; Guo, W.; Wang, P.; Sun, L. Design of a Unidirectional Joint with Adjustable Stiffness for Energy Efficient Hopping Leg. In Proceedings of the 2013 IEEE International Conference on Robotics and Biomimetics (ROBIO), Shenzhen, China, 12–14 December 2013; pp. 2587–2592. [Google Scholar] [CrossRef]
- Jafari, A.; Tsagarakis, N.G.; Sardellitti, I.; Caldwell, D.G. A New Actuator with Adjustable Stiffness Based on a Variable Ratio Lever Mechanism. IEEE/ASME Trans. Mechatronics 2012, 19, 55–63. [Google Scholar] [CrossRef]
- Yang, D.; Jin, H.; Liu, Z.; Fan, J.; Zhu, Y.; Zhang, H.; Dong, H. Design and Modeling of a Torsion Spring-Based Actuator (TSA) With Valid Straight-Arm Length Adjustable for Stiffness Regulation. In Proceedings of the 2016 IEEE International Conference on Mechatronics and Automation, Harbin, China, 7–10 August 2016; pp. 2381–2386. [Google Scholar] [CrossRef]
- Liu, Y.; Liu, X.; Yuan, Z.; Liu, J. Design and Analysis of Spring Parallel Variable Stiffness Actuator Based on Antagonistic Principle. Mech. Mach. Theory 2019, 140, 44–58. [Google Scholar] [CrossRef]
- Choi, J.; Hong, S.; Lee, W.; Kang, S. A Variable Stiffness Joint Using Leaf Springs for Robot Manipulators. In Proceedings of the 2009 IEEE International Conference on Robotics and Automation, Kobe, Japan, 12–17 May 2009; pp. 4363–4368. [Google Scholar] [CrossRef]
- Morita, T.; Sugano, S. Development of an anthropomorphic force-controlled manipulator WAM-10. In Proceedings of the 1997 8th International Conference on Advanced Robotics. Proceedings. ICAR’97, Monterey, CA, USA, 7–9 July 1997. [Google Scholar] [CrossRef]
- Barrett, E.; Fumagalli, M.; Carloni, R. Elastic Energy Storage in Leaf Springs for a Lever-Arm Based Variable Stiffness Actuator. In Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, Korea, 9–14 October 2016; pp. 537–542. [Google Scholar] [CrossRef]
- Wu, J.; Wang, Z.; Chen, W.; Wang, Y.; Liu, Y.-H. Design and Validation of a Novel Leaf Spring-Based Variable Stiffness Joint with Reconfigurability. IEEE/ASME Trans. Mechatron. 2020, 25, 2045–2053. [Google Scholar] [CrossRef]
- Tao, Y.; Wang, T.; Wang, Y.; Guo, L.; Xiong, H.; Xu, D. A New Variable Stiffness Robot Joint. Ind. Robot. Int. J. 2015, 42, 371–378. [Google Scholar] [CrossRef]
- Wang, R.; Huang, H. Active Variable Stiffness Elastic Actuator: Design and Application for Safe Physical Human-Robot Inter-Action. In Proceedings of the 2010 IEEE International Conference on Robotics and Biomimetics, Tianjin, China, 14–18 December 2010; pp. 1417–1422. [Google Scholar]
- Fang, L.; Wang, Y. Study on the Stiffness Property of a Variable Stiffness Joint Using a Leaf Spring. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2018, 233, 1021–1031. [Google Scholar] [CrossRef]
- Choi, J.; Hong, S.; Lee, W.; Kang, S.; Kim, M. A Robot Joint with Variable Stiffness Using Leaf Springs. IEEE Trans. Robot. 2011, 27, 229–238. [Google Scholar] [CrossRef]
- Naselli, G.A.; Rimassa, L.; Zoppi, M.; Molfino, R. A Variable Stiffness Joint with Superelastic Material. Meccanica 2016, 52, 781–793. [Google Scholar] [CrossRef]
- Mutyalarao, M.; Bharathi, D.; Rao, B.N. Large Deflections of a Cantilever Beam Under an Inclined End Load. Appl. Math. Comput. 2010, 217, 3607–3613. [Google Scholar] [CrossRef]
- Yang, Y.; Wang, X. Calculation on Large Deflection of Beam Bending Using Numerical Integral Method. J. Qinghai Univ. 1998, 16, 17–22. [Google Scholar]
- Ge, R.; Chu, Z. A Solution of Large Deflection Bending Deformation of Cantilever Beam Under Concentrated Load. Chin. J. Appl. Mech. 1997, 14, 73–79. [Google Scholar]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| l (mm) | 0 | 0~1 | ~3 | ~5 | ~7 | ~9 | ~11 | ~13 | ~15 | ~17 | ~19 |
|---|---|---|---|---|---|---|---|---|---|---|---|
| θmax (°) | 30 | 30 | 24 | 10 | 5 | 3 | 1.7 | 0.85 | 0.35 | 0.1 | 0.01 |
| αBmax (°) | 0 | 2.25 | 6.11 | 4.98 | 4.05 | 3.70 | 3.13 | 2.38 | 1.58 | 0.85 | 0.31 |
| l (mm) | 1 | 3 | 5 | 7 | 9 | 11 | 13 | 15 | 17 | 19 |
|---|---|---|---|---|---|---|---|---|---|---|
| σmax (Mpa) | 421 | 1310 | 1263 | 1106 | 1190 | 1206 | 1142 | 1106 | 971 | 345 |
| dymax (mm) | 0.537 | 1.547 | 1.311 | 1.113 | 1.057 | 0.916 | 0.787 | 0.496 | 0.255 | 0.028 |
| Length of Force Arm (mm) | 50 | 100 | 150 | |
|---|---|---|---|---|
| Mass of the Counterweight (kg) | ||||
| 0.1 | 0.08 | 0.15 | 0.23 | |
| 0.2 | 0.15 | 0.29 | 0.44 | |
| 0.3 | 0.24 | 0.45 | 0.68 | |
| 0.5 | 0.37 | 0.74 | 1.13 | |
| 1.0 | 0.75 | 1.48 | 2.23 | |
| 2.0 | 1.52 | 2.96 | 4.46 | |
| 3.0 | 2.32 | 4.54 | 6.76 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lu, Y.; Yang, Y.; Xue, Y.; Jiang, J.; Zhang, Q.; Yue, H. A Variable Stiffness Actuator Based on Leaf Springs: Design, Model and Analysis. Actuators 2022, 11, 282. https://doi.org/10.3390/act11100282
Lu Y, Yang Y, Xue Y, Jiang J, Zhang Q, Yue H. A Variable Stiffness Actuator Based on Leaf Springs: Design, Model and Analysis. Actuators. 2022; 11(10):282. https://doi.org/10.3390/act11100282
Chicago/Turabian StyleLu, Yifan, Yifei Yang, Yuan Xue, Jun Jiang, Qiang Zhang, and Honghao Yue. 2022. "A Variable Stiffness Actuator Based on Leaf Springs: Design, Model and Analysis" Actuators 11, no. 10: 282. https://doi.org/10.3390/act11100282
APA StyleLu, Y., Yang, Y., Xue, Y., Jiang, J., Zhang, Q., & Yue, H. (2022). A Variable Stiffness Actuator Based on Leaf Springs: Design, Model and Analysis. Actuators, 11(10), 282. https://doi.org/10.3390/act11100282