A transmission system is often used as the main device for decelerating and increasing the torque of the drive motor in mechanical equipment [
1,
2]. Owing to the characteristics of their light-weight nature and low-vibration running, plastic micro-drive systems are extensively used in various industrial-manufacturing, scenarios including motor-vehicle engines [
3,
4], electromechanical-actuator gearboxes [
5], hydraulic-drive system gerotor pumps [
6], tobacco machinery [
7], and wind-power gearboxes [
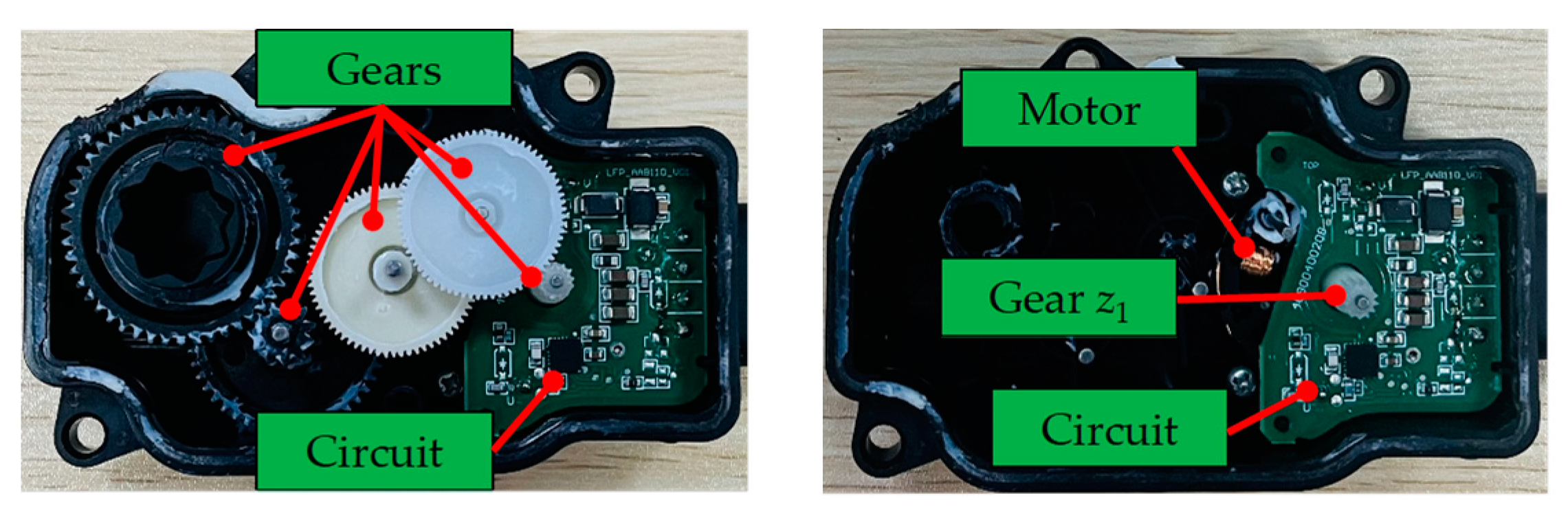
8]. A typical plastic micro-drive system is usually composed of a micro motor and a group of plastic gears. The micro motor not only supplies the power output but also needs to perform the function of auto and exact control. The plastic gears are deployed for stable power transmission. The reliability of the transmission system is highly dependent on the operating condition of the two functional components [
9]. As a result, monitoring the working status of the plastic micro-drive system plays an important role in the operation and maintenance of the entire system.
Electrical-parameter analysis [
10,
11,
12,
13,
14,
15], vibration analysis [
16,
17,
18], and acoustic analysis [
19,
20,
21] are commonly used methods for transmission-system-state monitoring. The vibration of the plastic micro-drive system mainly comes from the micro motor because of the lightweight nature and low-speed working condition of plastic gears. Nevertheless, vibration sensors are not always applicable in real industrial scenarios due to the miniaturization and embedded installation of the transmission system. For a plastic micro-drive system, the result of acoustic analysis is inevitably contaminated by environmental noise and suffers from time-varying transmission paths [
22]. As a consequence, the methods established on vibration analysis and acoustic analysis would lead to challenges in accurate fault detection and state monitoring. Fortunately, the electrical-parameter analysis provides a promising way to achieve real-time condition monitoring and fault diagnosis because of convenient signal acquisition. Electrical-parameter analysis is a non-invasive method and no extra sensors are needed. Data acquisition and analysis can be implemented by the additional circuits embedded in the motor controller. More importantly, working-current signals contain rich information about motor- and gear-group health conditions. In addition, the measured working-current signal is free from the effect of time-varying transmission paths and is highly sensitive to changes in state [
23]. Therefore, electrical-parameter analysis is more suitable and practical for plastic micro-drive system-fault diagnosis, because the working state of the transmission system can be directly reflected by monitoring the changes in electrical parameters of the system.
A general fault-diagnosis approach includes four aspects: detection of the presence of the fault [
24], isolation of the fault [
25], identification of the amplitude of the fault [
26], and the evolution of the fault (prognosis) [
27]. For the fault detection of plastic micro-drive systems, research now needs to focus on fault mechanism and types that are part of detecting the presence of faults. A great number of studies has been reported in recent decades regarding fault detection of motors, steel gear-transmission systems, and actuators. In 1987, a method of monitoring motor-state parameters was proposed by Tavner et al. [
28]. Parameters of a motor in a working state were detected to analyze the abnormal parts. The fault location can be determined by extracting the working-state features of the motor in real time. A modified motor-current signature analysis was proposed by Arellano-Padilla et al. [
29] for performing integral condition monitoring in a drive containing a gearbox. Drive-rectifier input currents were applied instead of machine currents. The experimental results demonstrated that the feasibility of the scheme to detect a faulty gearbox could be achieved. Chen et al. [
30] analyzed the stator-current signals of an induction motor, and a model of planetary-gearbox faults under time-varying speed conditions was established. The fault characteristics of time-varying planetary gearboxes were summarized. An adaptive iterative generalized demodulation method was adopted to solve the problem of extracting weak time-varying fault features from motor stator-current signals. In [
31], Gao et al. pointed out that the stator-current signal could be easily obtained, which was applied to planetary-gearbox-fault detection. A model of amplitude- and frequency-modulated current signal was established. Based on three complementary analysis results of the Fourier spectrum, amplitude-demodulation spectrum, and frequency-demodulation spectrum, the local fault of ring gears in the planetary gearbox was determined. Song et al. [
32] summarized the fault characteristics of the transmission gear of radar antenna. The modulation component corresponding to the change in angular velocity caused by gear fault was obtained. The symmetrical-frequency characteristics on both sides of the fundamental frequency of the motor-stator spectrum could be used to determine whether gear fault occurred. Marzebali et al. [
33] concluded that the major fault-frequency components related to the gearbox were disturbed by noise in the stator current of the wound-rotor-induction generator. In [
34], the resonance residual method was proposed to extract the amplified planetary-gearbox-fault signatures in the frequency domain. In [
35], Ottewill et al. built a parameter model for a motor-gearbox system and successfully extracted gearbox-fault features through synchronous-signal averaging. Kia et al. [
36] proposed a frequency-modulation-current model for gearbox-fault diagnosis and extracted the fault characteristics from the phase-demodulated spectrum. In [
37], a simplified and fast software-based fault-detection and -localization (FDL) approach was proposed for a grid-connected modular multilevel converter (MMC), which has similar failures to those of plastic micro-drive systems. The open-circuit fault could be determined by comparing the measured current-state-variable errors with threshold values. In [
38], a method based on actuator-attitude signals that can provide fault features reflecting spatial relationships was proposed. With the aid of a multiscale convolutional-capsule network (MCCN), the failure of actuators could be correctly detected. Moreover, the data-driven approaches [
39,
40] and policy-learning methods using observational data [
41] could be conducted for the fault detection of a transmission system. These methods are applied when sufficient historical failure data are available to compute the distribution and location of failure. However, with the help of non-invasive electrical-parameter analysis, the fault diagnosis of plastic micro-drive systems can be implemented in real time. It is more important to focus on the working condition and failure mode of plastic micro-drive systems. Using a simple and less-time-consuming method is clearly a much better choice, and there is no necessity to collect historical failure data. In summary, these studies have enriched the literature on motors, gearboxes, and actuators through electrical-parameter analysis, and good application prospects have been shown in past studies.
Despite the fact that a lot of studies have been carried out on motors and steel gear-transmission systems, the existing methods may obtain poor fault-detection results for plastic micro-drive systems because there are significant differences between the two kinds of actuators. Some of the failure-related indicators would be invalid due to the plastic-material-based gears in the micro-drive system. Moreover, the characteristic of failure may be much weaker than in steel gears and usually submerged in a significant amount of undesired noise. So far, to the authors; best knowledge, few studies have focused on the fault diagnosis of plastic micro-drive systems.
Based on the above review and analysis, a fault-detection strategy for a plastic micro-drive system is proposed in this paper. Comparing with the existing studies, the contributions of this article lie in the following aspects.



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}