
Estimation of the Dynamic Parameters of the Bearings in a Flexible Rotor System Utilizing Electromagnetic Excitation by a Built-In Motor

Abstract
:1. Introduction
2. Estimation Method
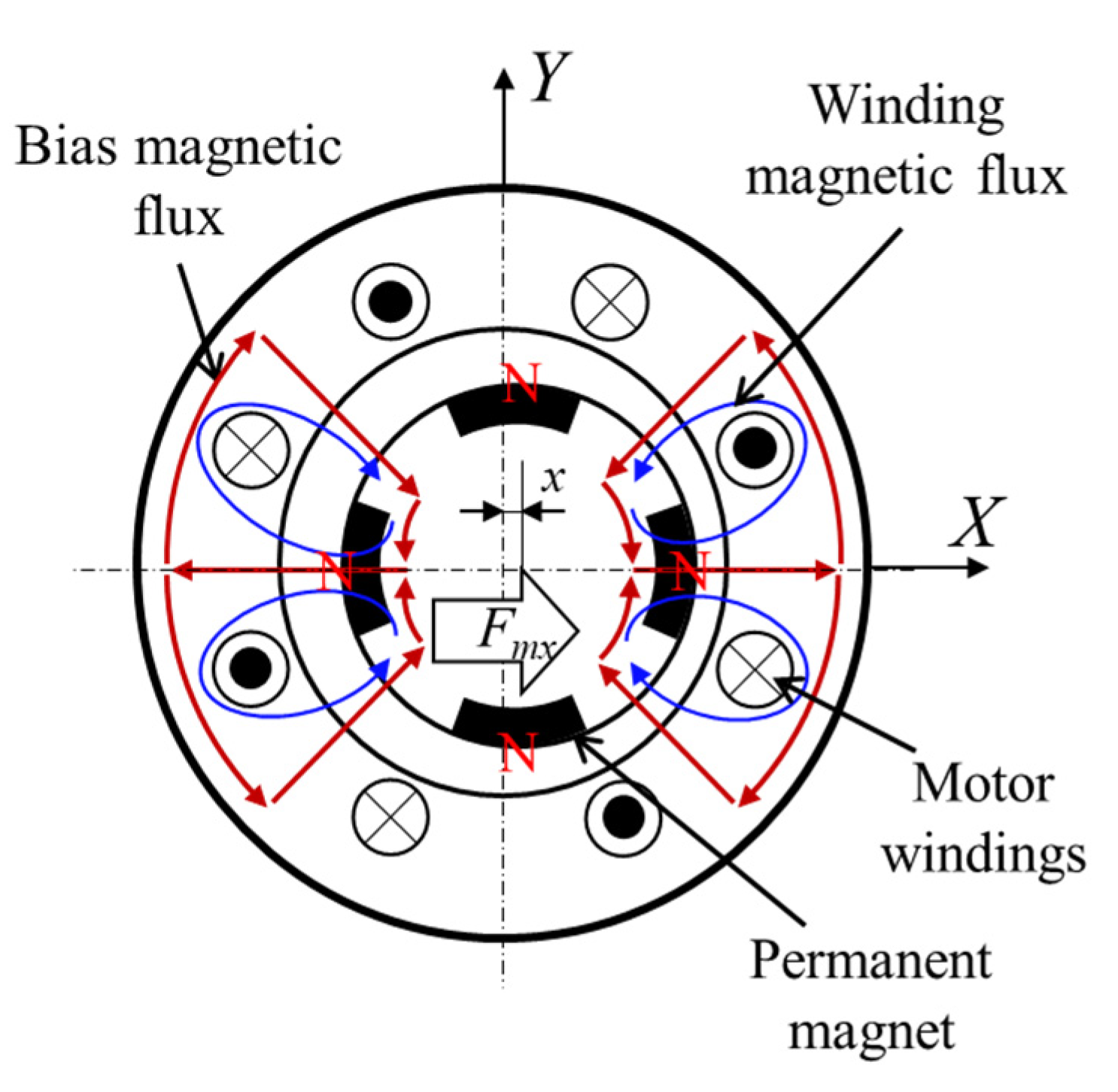
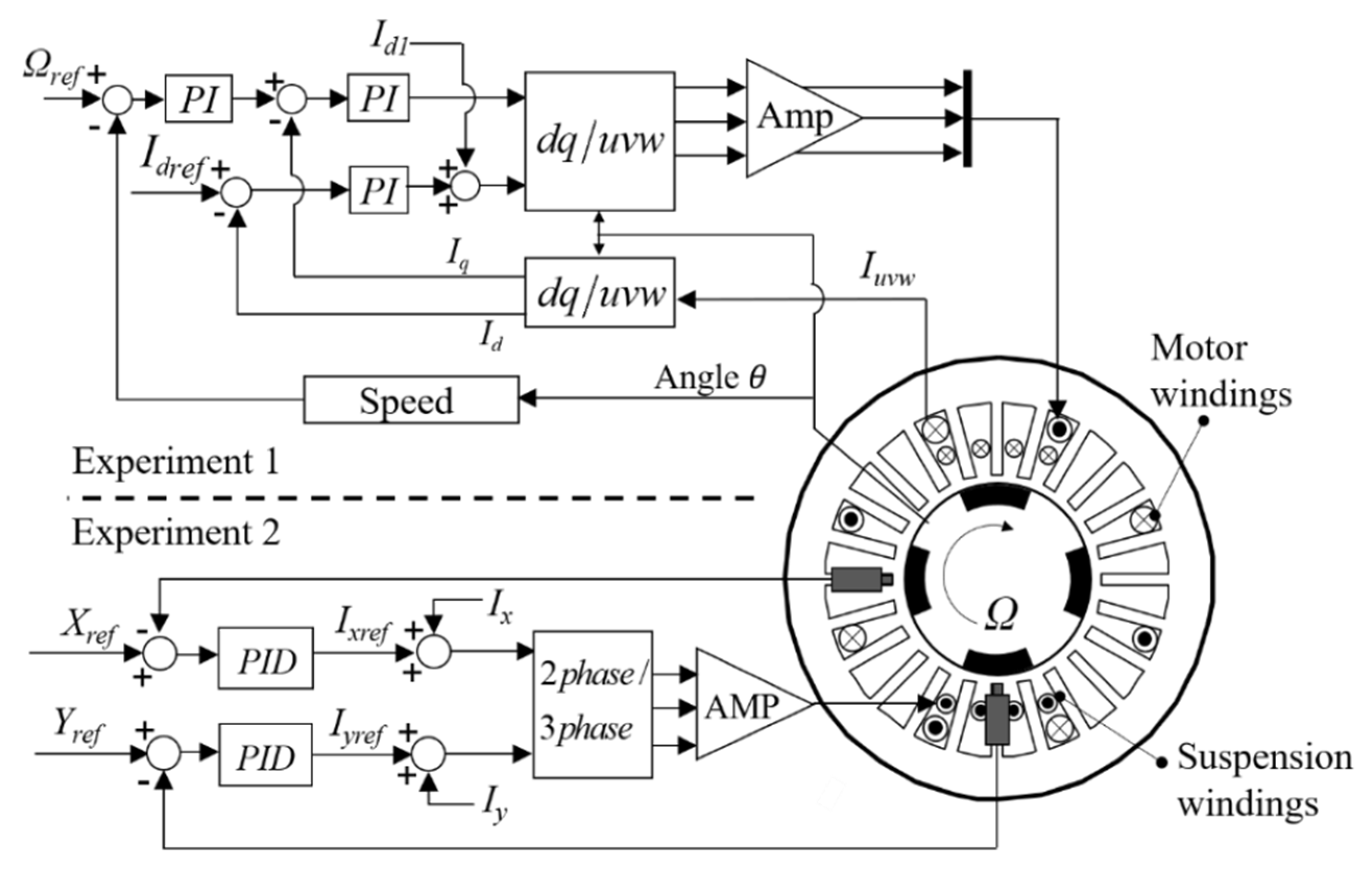
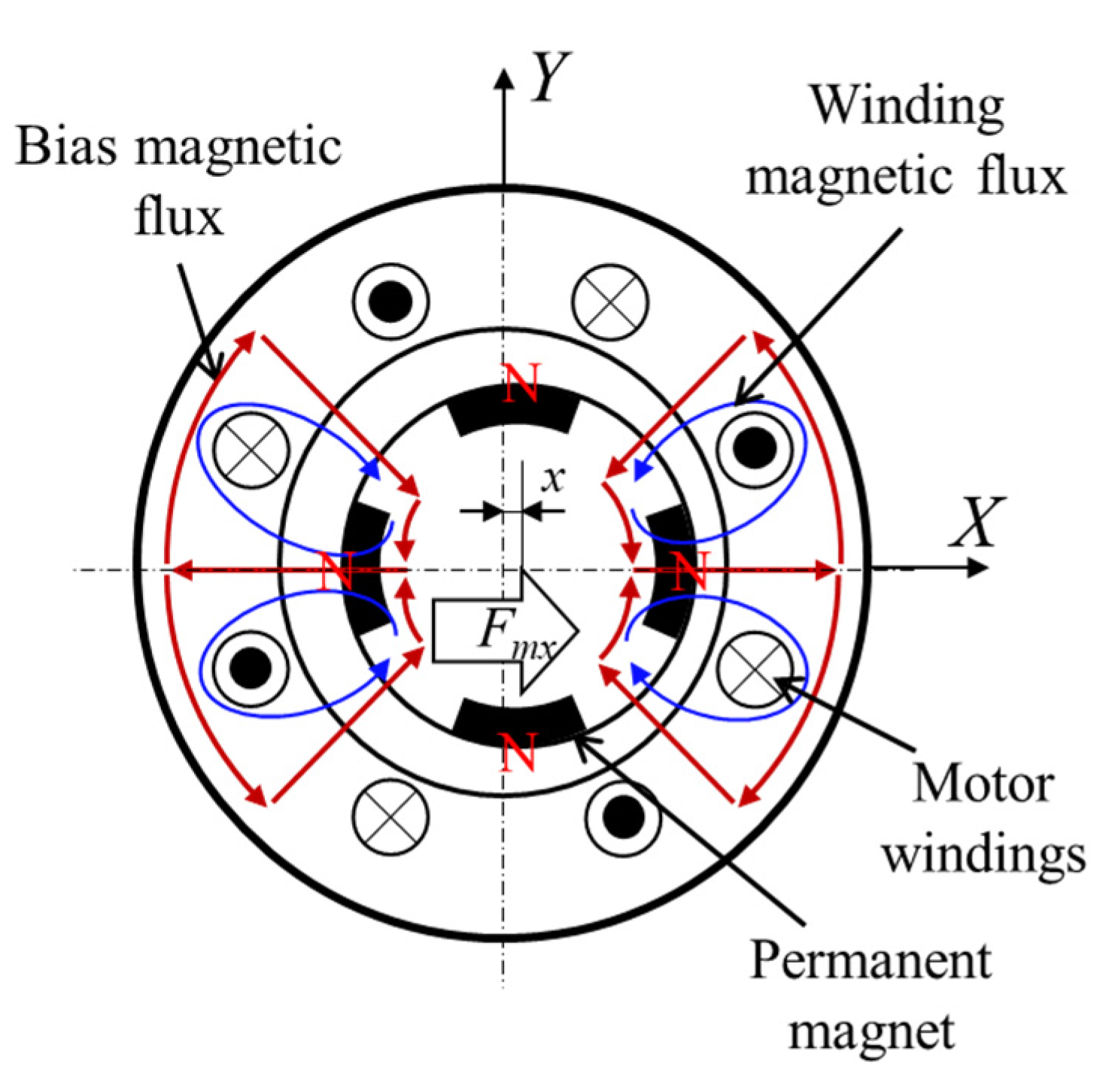
2.1. Excitation Force Generated by a PM Motor
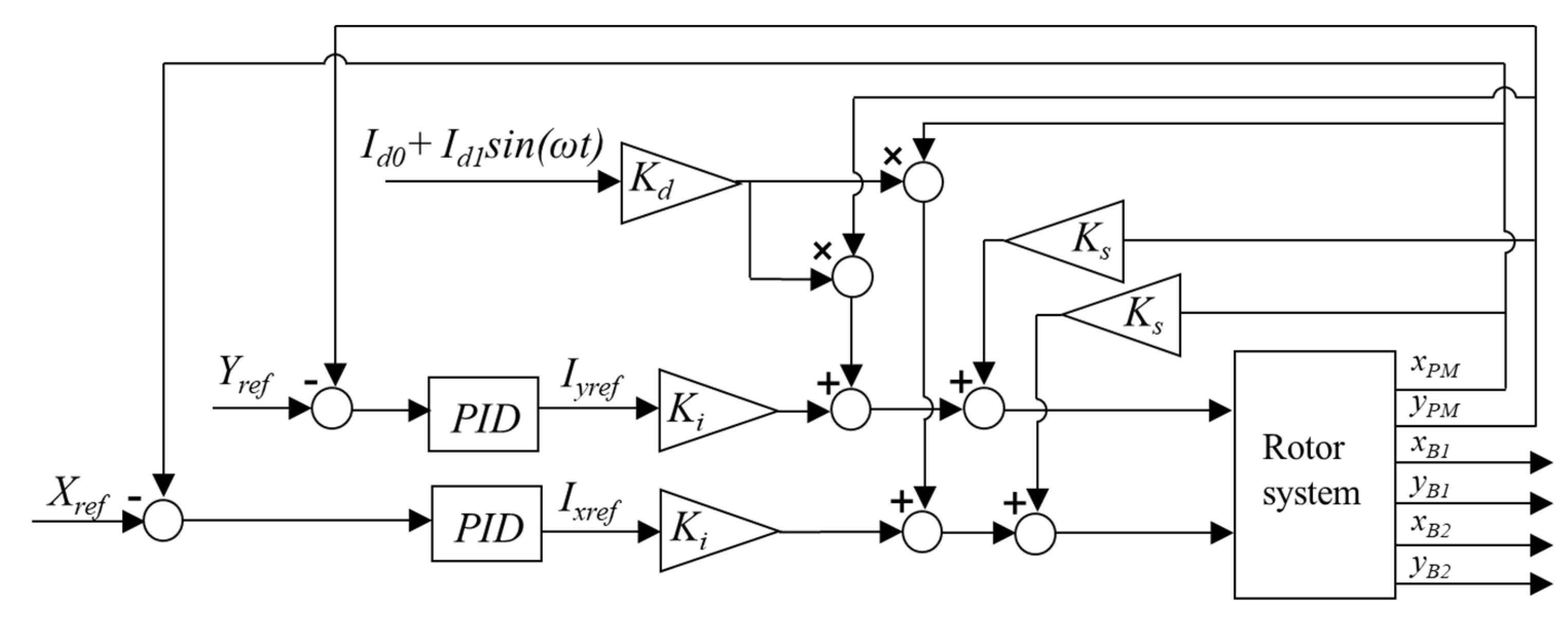
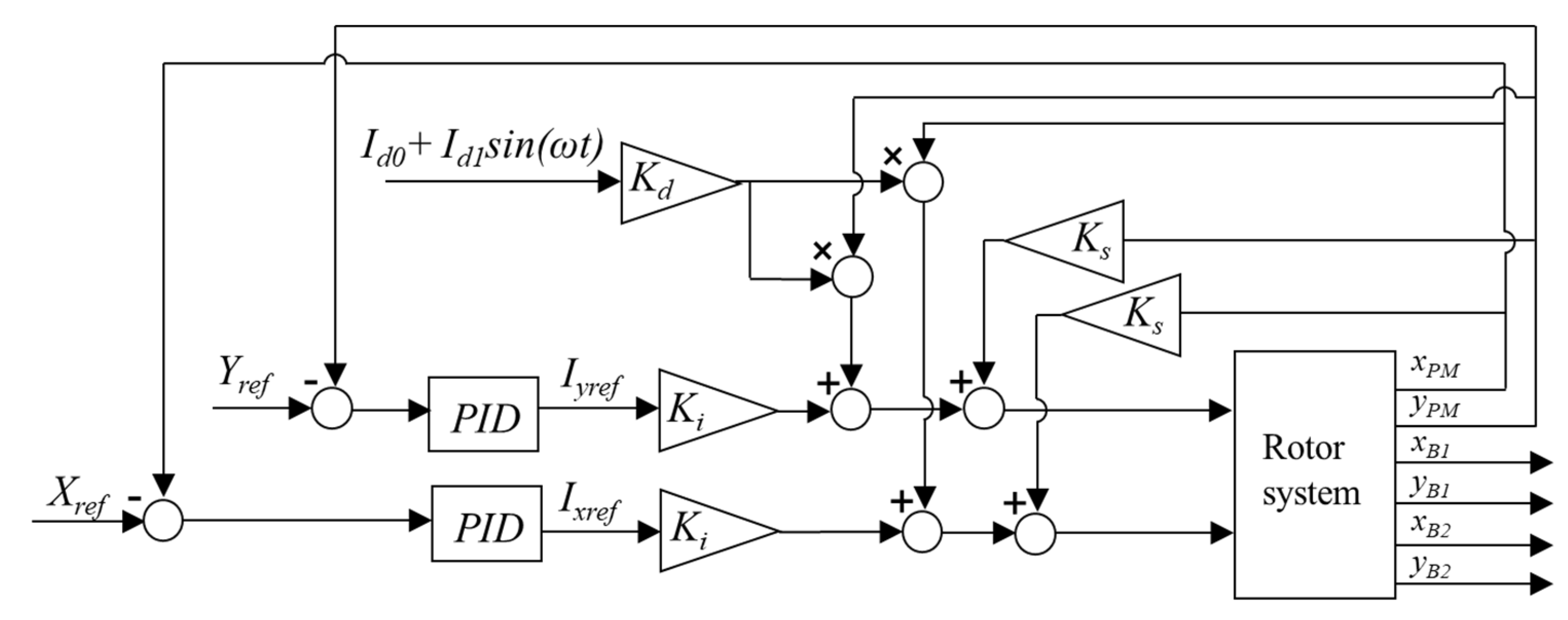
2.2. Algorithm for Estimating the Dynamic Parameters of the Bearing
3. Numerical Evaluation
4. Experiment Evaluation
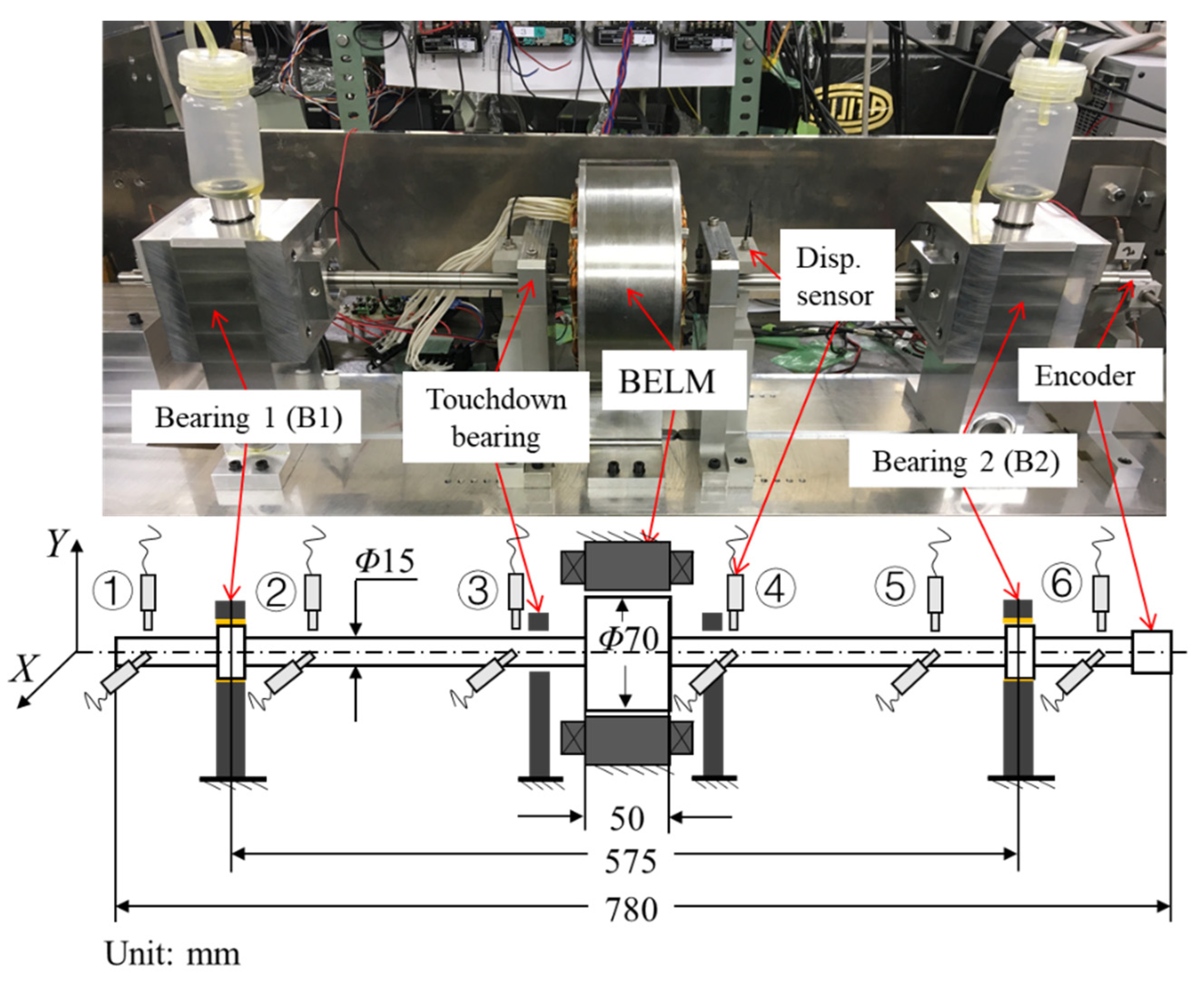
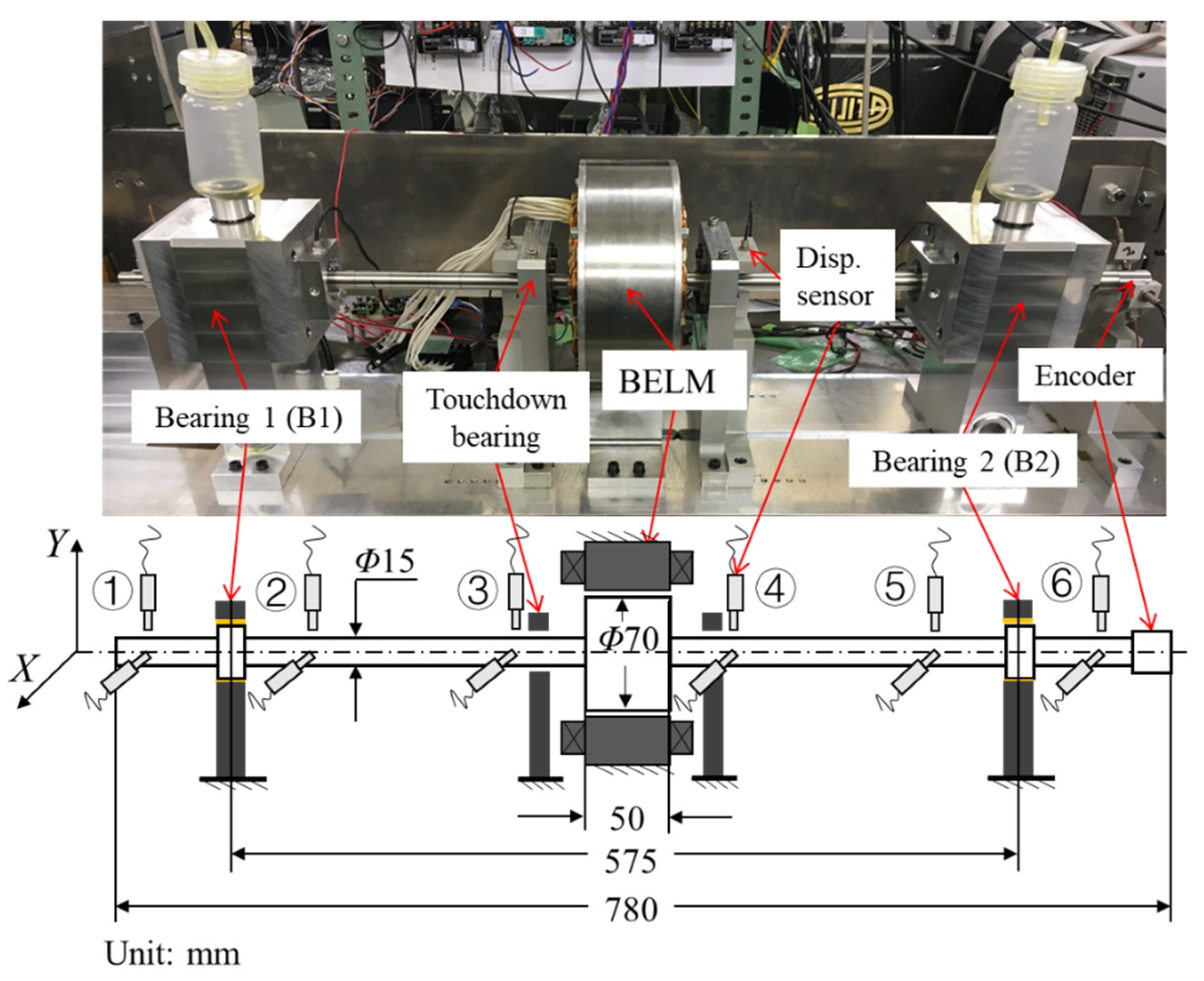
4.1. Experimental Method
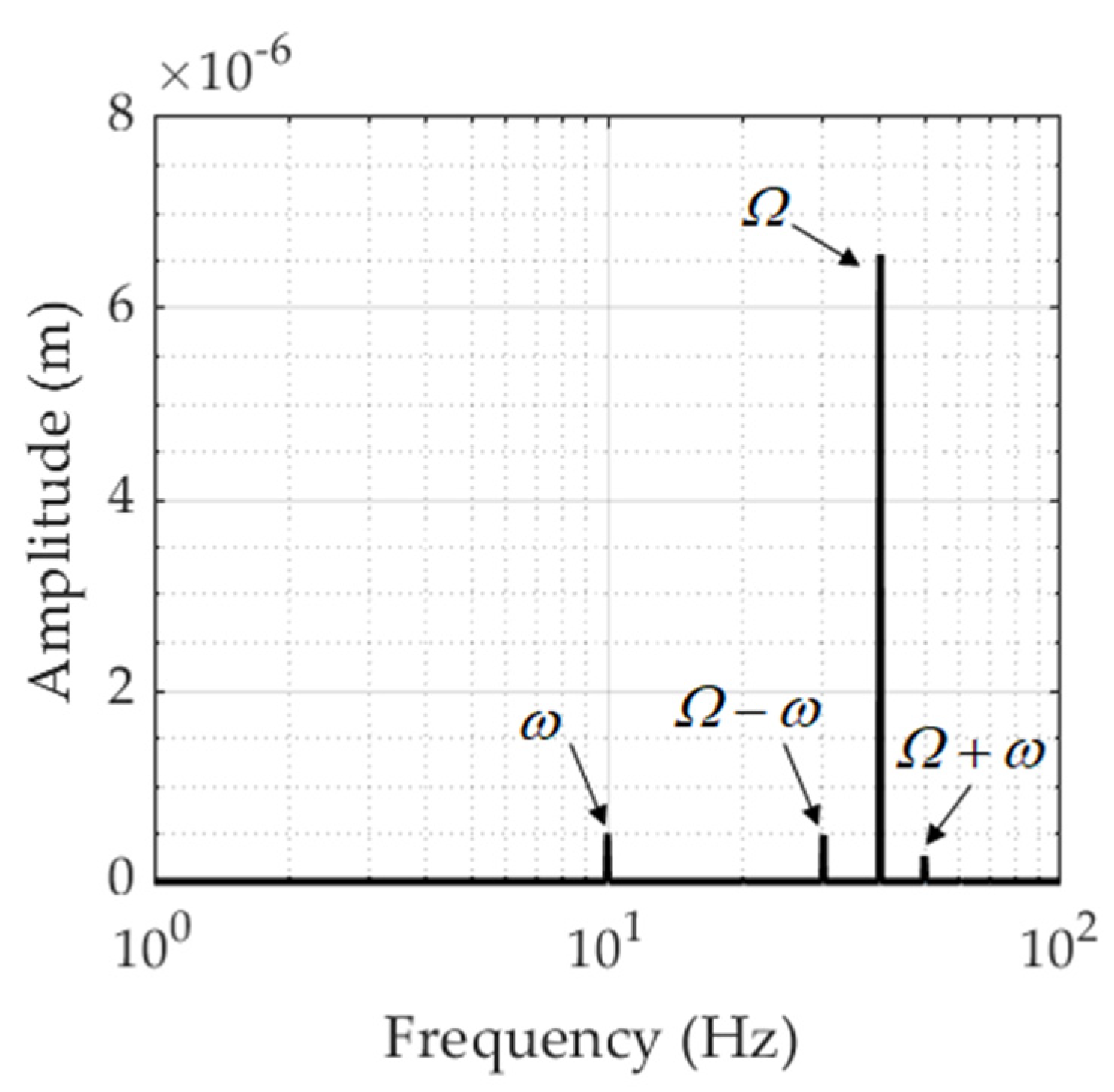
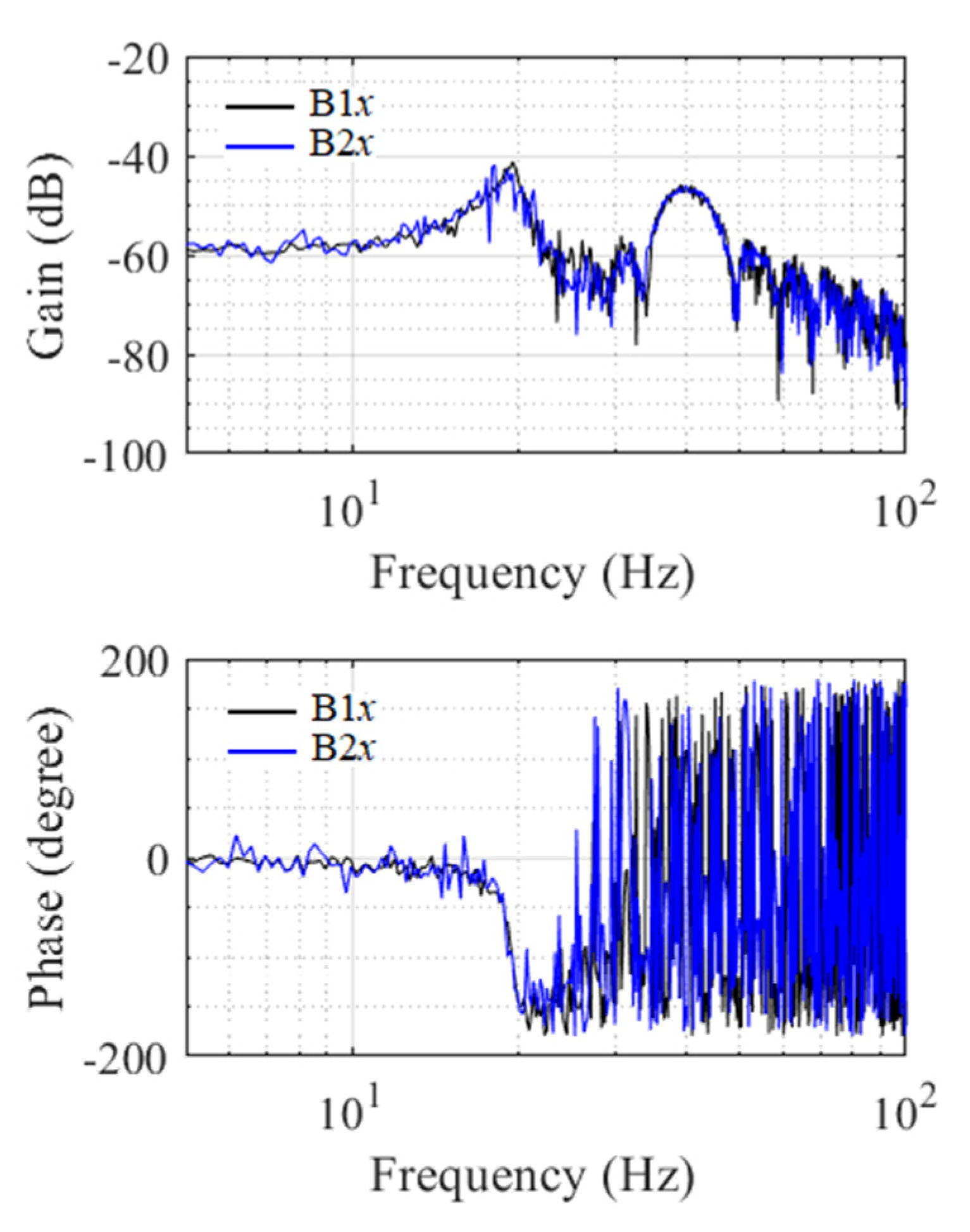
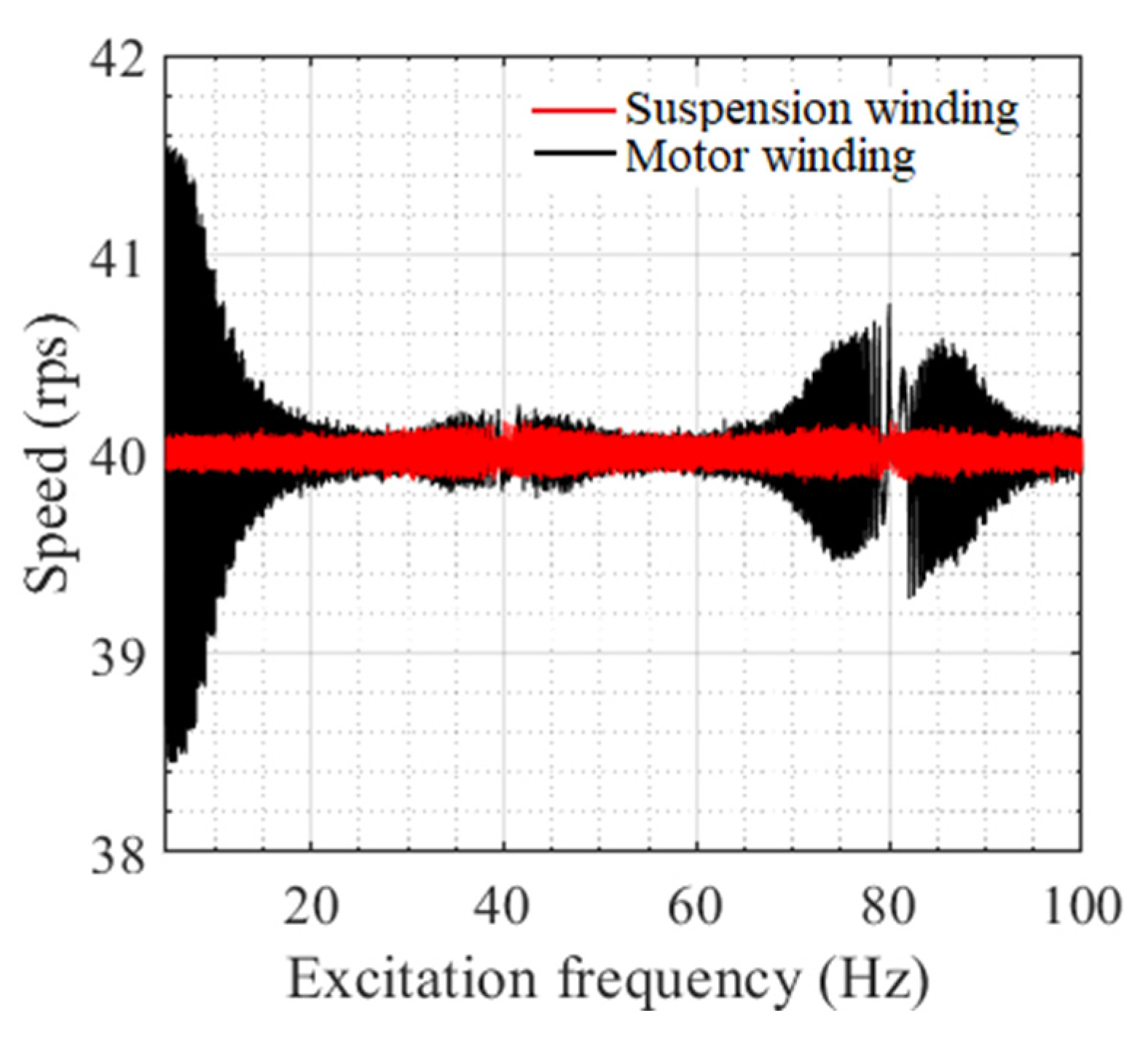
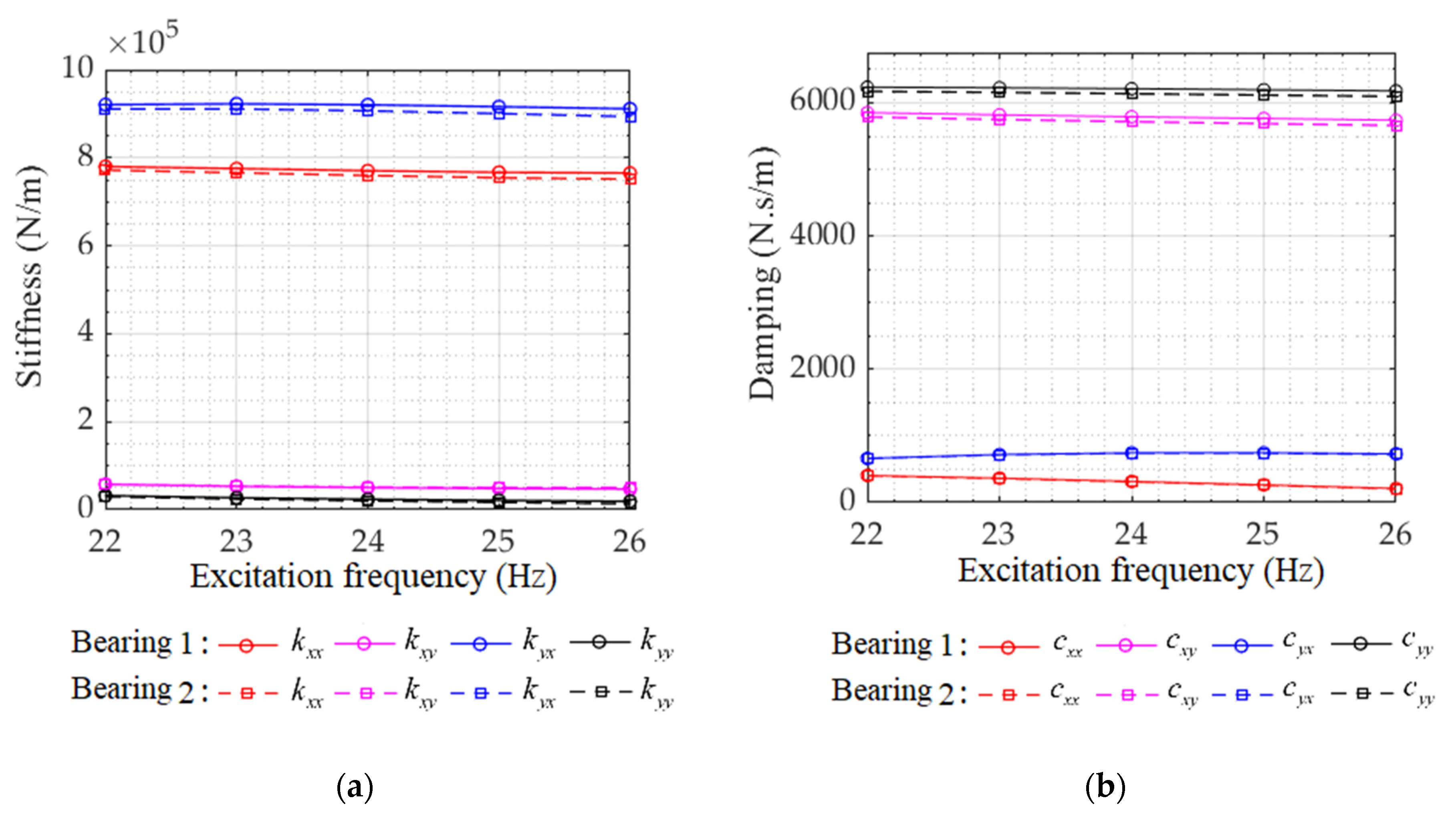
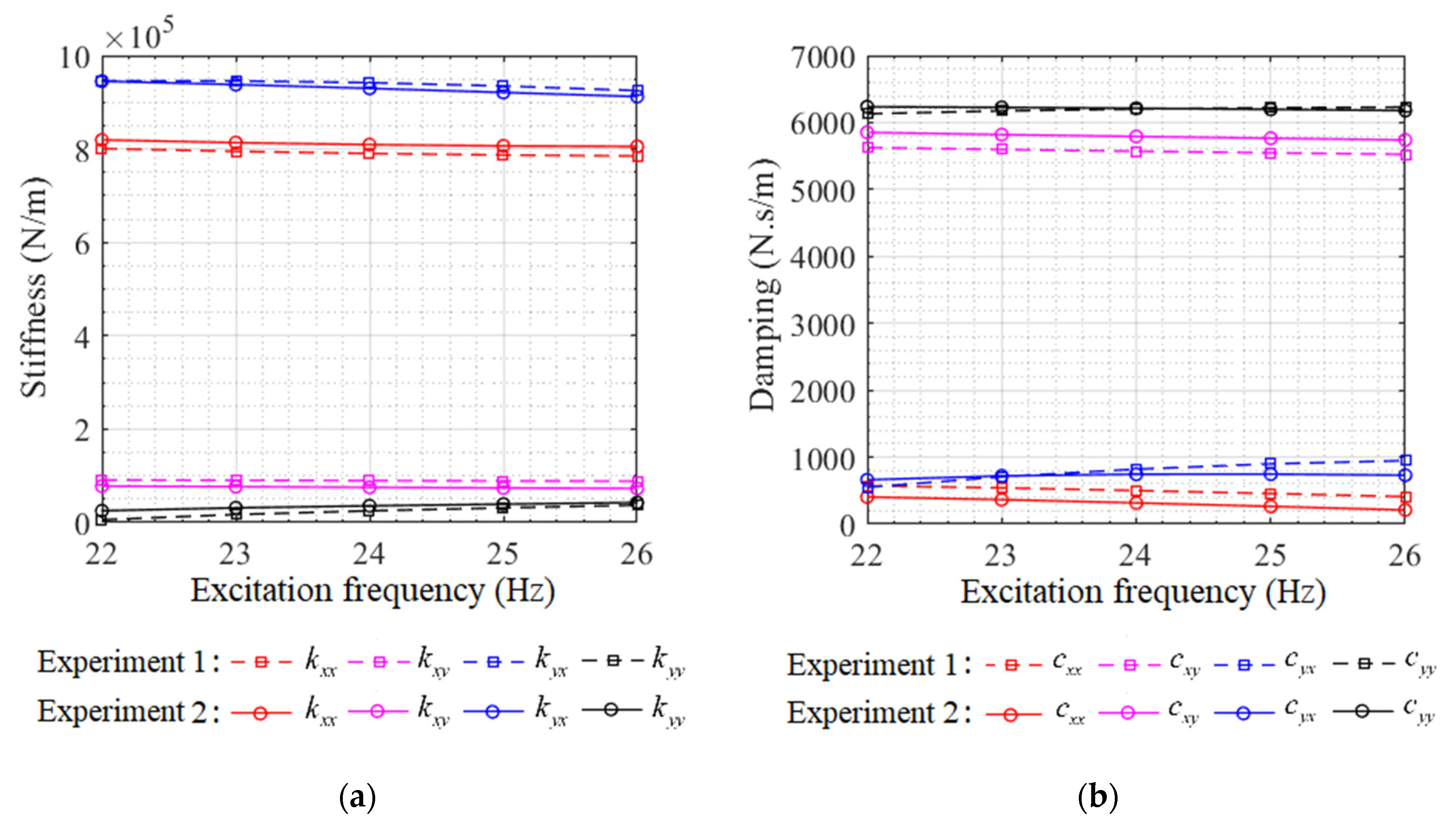
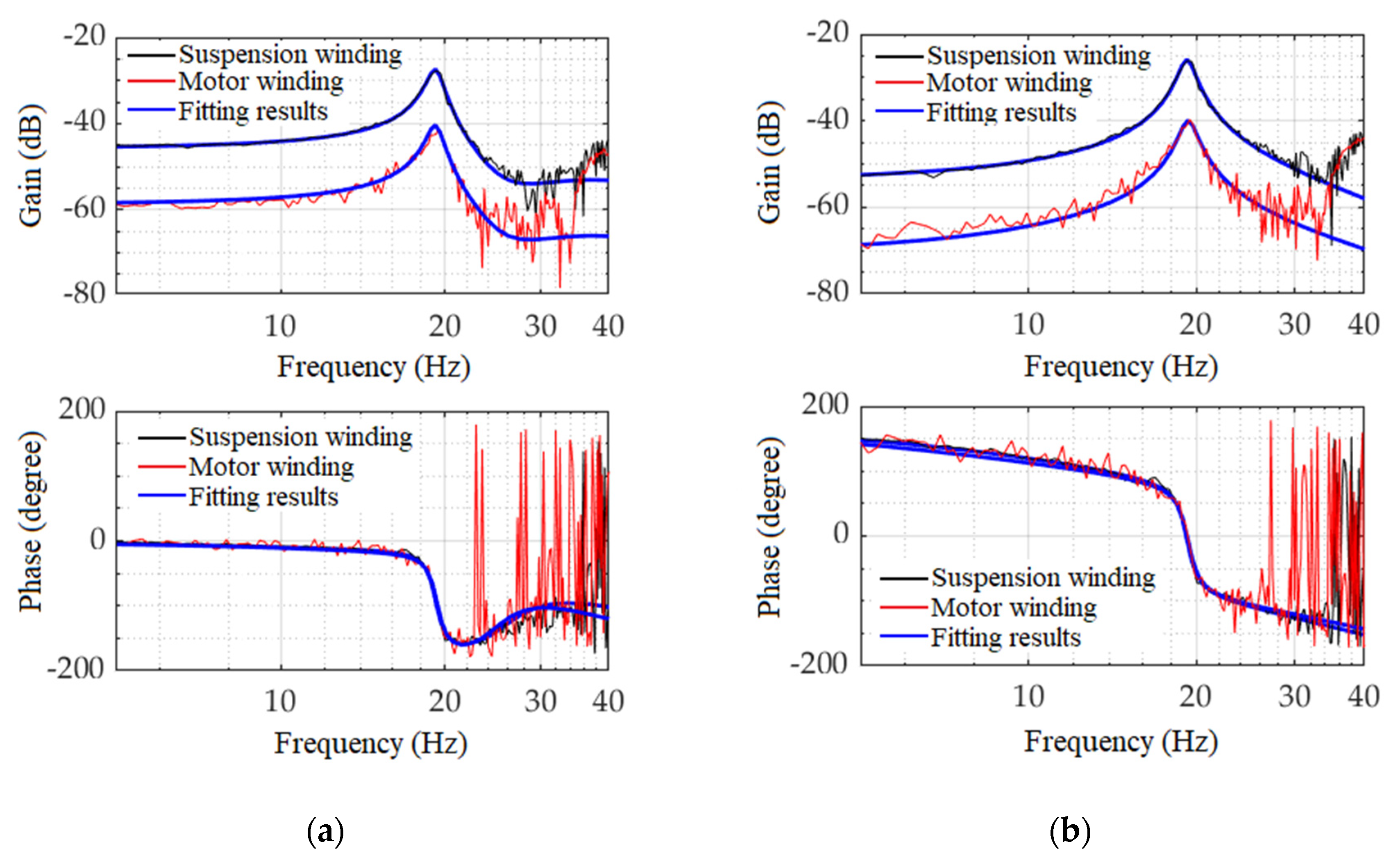
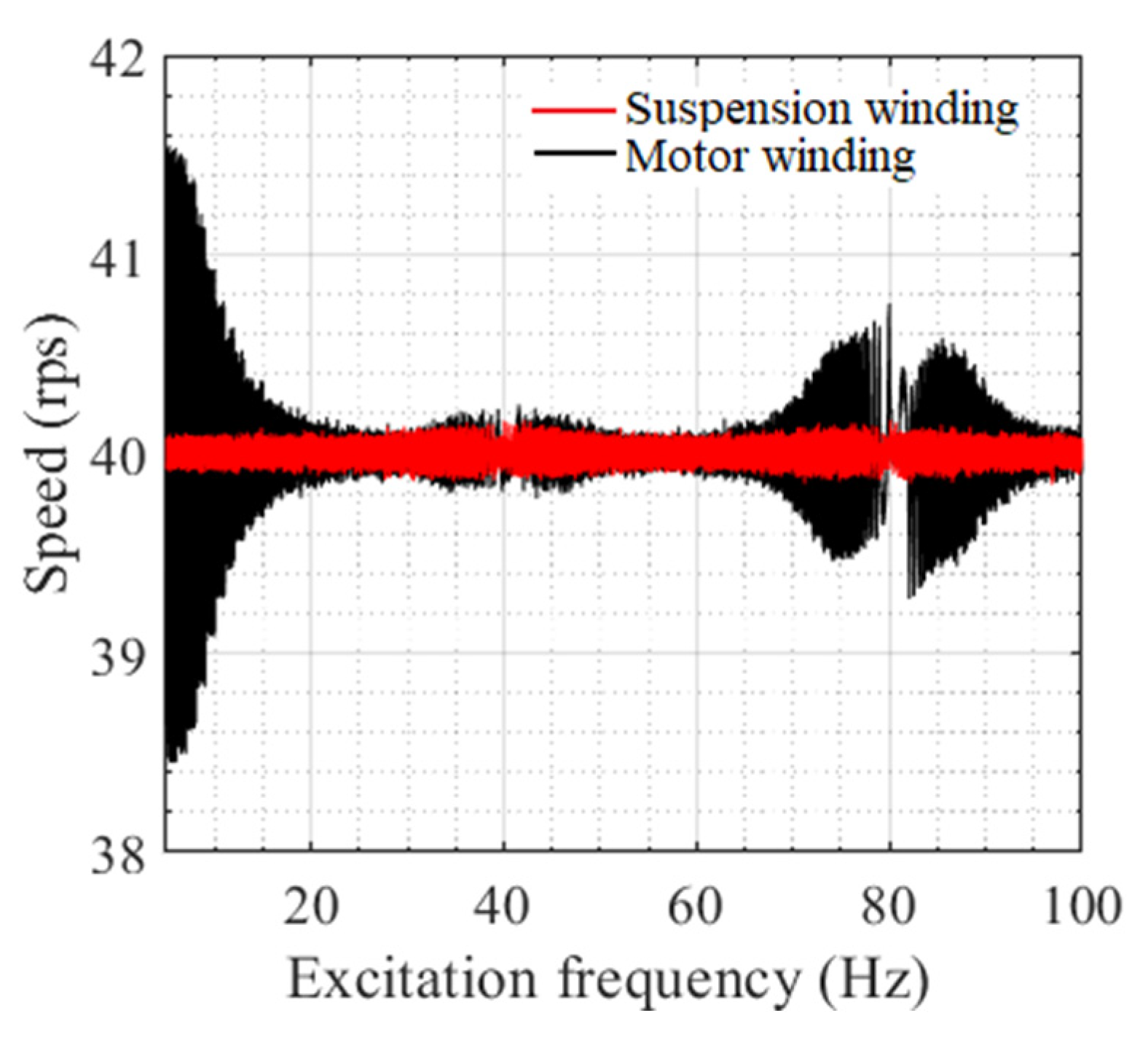
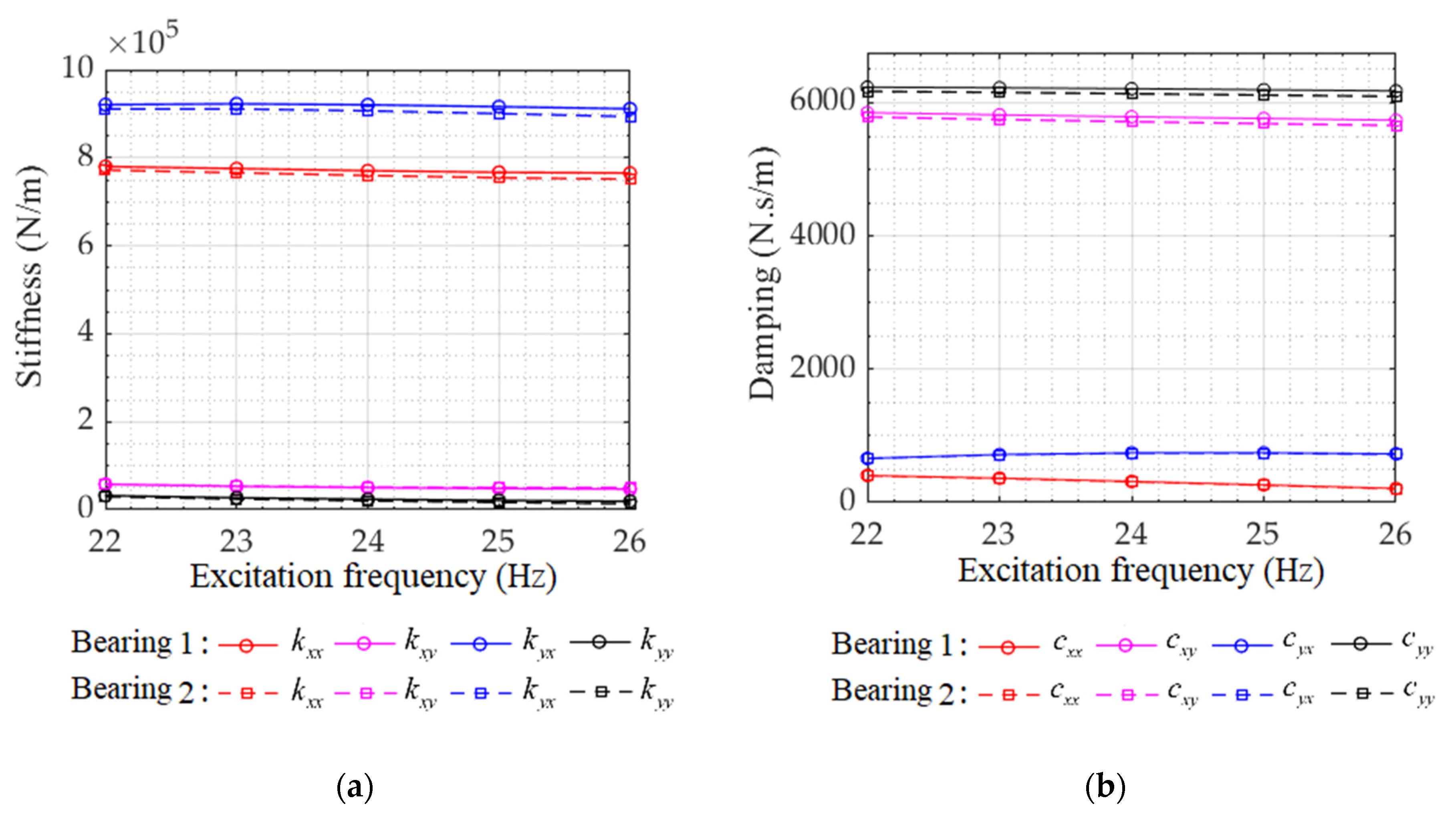
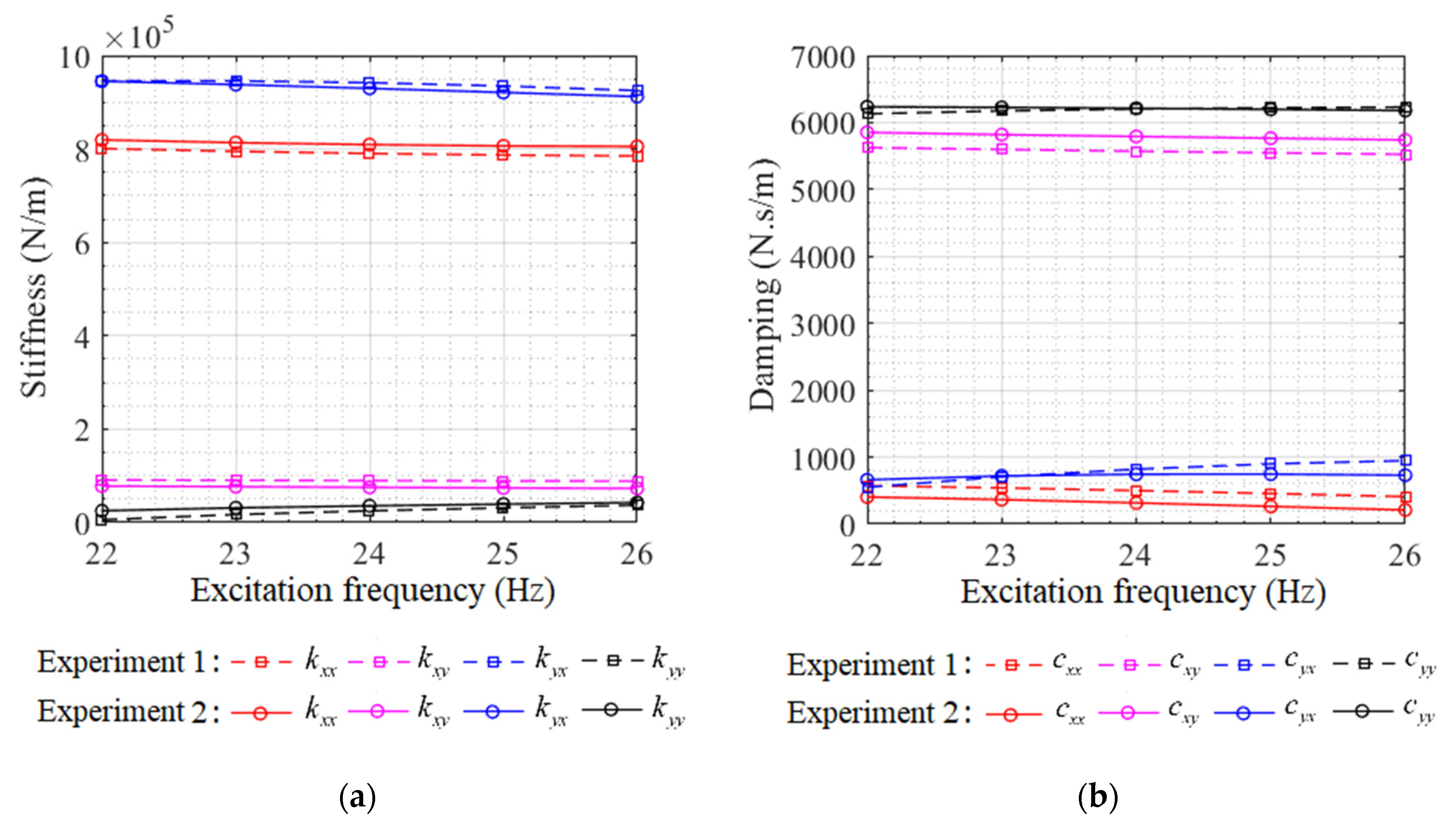
4.2. Results of the Experiments
5. Conclusions and Discussion
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Lund, J.W. Review of the concept of dynamic coefficients for fluid film journal bearings. ASME J. Tribol. 1987, 109, 37–41. [Google Scholar] [CrossRef]
- Tiwari, R.; Lees, A.W.; Friswell, M.I. Identification of dynamic bearing parameters: A review. Shock. Vib. Dig. 2004, 36, 99–124. [Google Scholar] [CrossRef]
- Goodwin, M.J. Experimental Techniques for Bearing Impedance Measurement. J. Manuf. Sci. Eng. 1991, 113, 335–342. [Google Scholar] [CrossRef]
- Childs, D.; Joel, H. Static performance characteristics and rotordynamic coefficients for a four-pad ball-in-socket tilting pad journal bearing. J. Eng. Gas Turbines Power 2009, 131, 062502. [Google Scholar] [CrossRef]
- Jiang, G.; Hu, H.; Xu, W.; Jin, Z.; Xie, Y. Identification of oil film coefficients of large journal bearings on a full-scale journal bearing test rig. Tribol. Int. 1997, 30, 789–793. [Google Scholar] [CrossRef]
- Xu, Y.; Zhou, J.; Lin, Z.; Jin, C. Identification of dynamic parameters of active magnetic bearings in a flexible rotor system considering residual unbalances. Mechatronics 2018, 49, 46–55. [Google Scholar] [CrossRef]
- Tiwari, R.; Lees, A.; Friswell, M. Identification of speed-dependent bearing parameters. J. Sound Vib. 2002, 254, 967–986. [Google Scholar] [CrossRef] [Green Version]
- De Santiago, O.C.; San Andrés, L. Field methods for identification of bearing support parameters part i: Identification from transient rotor dynamic response due to impacts. J. Eng. Gas Turbines Power 2007, 129, 205–212. [Google Scholar] [CrossRef]
- De Santiago, O.C.; San Andrés, L. Field methods for identification of bearing support parameters part ii: Identification from rotor dynamic response due to imbalances. J. Eng. Gas Turbines Power 2007, 129, 213–219. [Google Scholar] [CrossRef]
- San Andrés, L.; De Santiago, O.C. Identification of bearing force coefficients from measurements of imbalance response of a flexible rotor. In Proceedings of the ASME Turbo Expo 2004: Power for Land, Sea, and Air, Vienna, Austria, 14–17 June 2004; Volume 41677, pp. 843–850. [Google Scholar]
- Matsubara, A.; Tsujimoto, S.; Kono, D. Evaluation of dynamic stiffness of machine tool spindle by non-contact excitation tests. CIRP Ann. 2015, 64, 365–368. [Google Scholar] [CrossRef]
- Wang, W.; Li, Q.; Gao, J.; Yao, J.; Allaire, P. An identification method for damping ratio in rotor systems. Mech. Syst. Signal Process. 2016, 68, 536–554. [Google Scholar] [CrossRef]
- Li, Q.; Wang, W.; Weaver, B.; Wood, H. Model-Based Interpolation-Iteration Method for Bearing Coefficients Identification of Operating Flexible Rotor-Bearing System. Int. J. Mech. Sci. 2017, 131, 471–497. [Google Scholar] [CrossRef]
- Tsunoda, W.; Wagner, C.; Berninger, T.; Thuemmel, T.; Rixen, D. Stability Diagnosis for Rotor–Seal System by Utilizing Active Magnetic Bearing. In Proceedings of the XVII International Symposium on Dynamic Problems of Mechanics DINAME, Sao Sebastiao, Brazil, 5–10 March 2017. Paper No. DINAME2017-0048. [Google Scholar]
- Tsunoda, W.; Hijikata, W.; Shinshi, T.; Fujiwara, H.; Matsushita, O. Diagnostic Experiments for Stability of Rotor-Oil Film Bearing Systems Using Radial Magnetic Bearing Excitation. In Proceedings of the Vibrations in Rotating Machinery (VIRM11) conference, Manchester, UK, 13–15 September 2016. [Google Scholar]
- Chen, Y.; Yang, R.; Sugita, N.; Mao, J.; Shinshi, T. Identification of Bearing Dynamic Parameters and Unbalanced Forces in a Flexible Rotor System Supported by Oil-Film Bearings and Active Magnetic Devices. Actuators 2021, 10, 216. [Google Scholar] [CrossRef]
- Tsunoda, W.; Chiba, A.; Shinshi, T. Frequency Response Function Measurement Utilizing Radial Excitation Force Generated by Permanent Magnet Synchronous Motor. Mechatronics 2019, 61, 49–57. [Google Scholar] [CrossRef]
- Yang, R.; Tsunoda, W.; Han, D.; Zhong, J.; Shinshi, T. Frequency response function measurement of a rotor system utilizing electromagnetic excitation by a built-in motor. J. Adv. Mech. Des. Syst. Manuf. 2020, 14, AMDSM0043. [Google Scholar] [CrossRef] [Green Version]
- Tsunoda, W.; Chiba, A.; Shinshi, T. Radial Excitation Force Generated by Permanent Magnet Motor Using d-Axis Current Injection. In Proceedings of the IEEE International Conference on Industrial Technology (ICIT), Lyon, France, 20–22 February 2018; pp. 504–509. [Google Scholar]
- Takenaga, T.; Kubota, Y.; Chiba, A.; Fukao, T. A principle and a design of a consequent-pole beaingless motor. In Proceedings of the 8th International Symposium on Magnetic Bearing, Mito, Japan, 26–28 August 2002. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Modal | Measured Frequency | Calculated Frequency | Error |
|---|---|---|---|
| 1 | 83.3 Hz | 82.9 Hz | −0.48% |
| 2 | 268.2 Hz | 269.8 Hz | 0.59% |
| 3 | 510.8 Hz | 507.5 Hz | −0.64% |
| 4 | 770.5 Hz | 756.5 Hz | −1.82% |
| Components | Parameters | Values |
|---|---|---|
| Rotor | Length | 780 mm |
| Diameter | 15 mm | |
| Young’s modulus | 2.05 × 1011 N/m2 | |
| Mass density | 7850 kg/m3 | |
| Poisson’s ratio | 0.29 | |
| Oil-film bearing | Length | 25 mm |
| Diameter | 25 mm | |
| Clearance | 0.1 mm | |
| Motor | Rotor length | 50 mm |
| Rotor diameter | 70 mm |
| Parameters | First Set |
|---|---|
| Proportional (P) | 52,000 |
| Integral (I) | 17,500 |
| Derivative (D) | 60 |
| Filter coefficient (Nf) | 12,560 |
| Current–force coefficient (Ki) | 26.4 N/A |
| Displacement–force coefficient (Ks) | 1.27 × 106 N/m |
| Eccentricity–current–force coefficient (Kd) | 1.17 × 104 N/A·m |
| Bias current (Id0) | −4 A |
| Excitation current amplitude (Id1) | 4 A |
| Unbalance moment (mr) | 6 × 10−4 kgm |
| Parameters | Bearing 1 | Bearing 2 | |||
|---|---|---|---|---|---|
| Assumed | Estimated | Assumed | Estimated | ||
| Stiffness (N/m) | kxx | 1 × 106 | 1.000 × 106 | 1.2 × 106 | 1.200 × 105 |
| kxy | 5 × 105 | 4.999 × 105 | 5 × 105 | 4.999 × 105 | |
| kyx | 6 × 105 | 6.000 × 105 | 8 × 105 | 8.000 × 105 | |
| kyy | 1.2 × 106 | 1.199 × 106 | 1.4 × 106 | 1.399 × 105 | |
| Damping (N.s/m) | cxx | 4000 | 4000.00 | 5000 | 5000.00 |
| cxy | 1500 | 1499.99 | 1000 | 999.99 | |
| cyx | 2000 | 2000.00 | 2000 | 2000.00 | |
| cyy | 5000 | 4999.99 | 4000 | 3999.99 | |
| Stiffness (N/m) | Exp. 1 | Exp. 2 | Error | Damping (N.s/m) | Exp. 1 | Exp. 2 | Error |
|---|---|---|---|---|---|---|---|
| kxx | 7.92 × 105 | 8.11 × 105 | −2.37% | cxx | 4.95 × 102 | 3.12 × 102 | 58.87% |
| kxy | 8.97 × 104 | 7.54 × 104 | 19.03% | cxy | 5.57 × 103 | 5.79 × 103 | −3.81% |
| kyx | 9.38 × 105 | 9.29 × 105 | 1.02% | cyx | 7.84 × 102 | 7.21 × 102 | 8.92% |
| kyy | 2.33 × 104 | 3.12 × 104 | −33.11% | cyy | 6.19 × 103 | 6.21 × 103 | 0.31% |
| Modal | Calculated Natural Frequency (Parameters from Exp. 1) | Calculated Natural Frequency (Parameters from Exp. 2) | Error |
|---|---|---|---|
| 1 | 47.82 Hz | 46.41 Hz | 3.04% |
| 58.27 Hz | 58.26 Hz | 0.02% | |
| 2 | 262.09 Hz | 262.48 Hz | −0.15% |
| 271.63 Hz | 272.16 Hz | −0.19% | |
| 3 | 461.34 Hz | 461.33 Hz | 0.01% |
| 505.91 Hz | 506.84 Hz | −0.18% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, Y.; Yang, R.; Sugita, N.; Zhong, J.; Mao, J.; Shinshi, T. Estimation of the Dynamic Parameters of the Bearings in a Flexible Rotor System Utilizing Electromagnetic Excitation by a Built-In Motor. Actuators 2022, 11, 1. https://doi.org/10.3390/act11010001
Chen Y, Yang R, Sugita N, Zhong J, Mao J, Shinshi T. Estimation of the Dynamic Parameters of the Bearings in a Flexible Rotor System Utilizing Electromagnetic Excitation by a Built-In Motor. Actuators. 2022; 11(1):1. https://doi.org/10.3390/act11010001
Chicago/Turabian StyleChen, Yinsi, Ren Yang, Naohiro Sugita, Jianpeng Zhong, Junhong Mao, and Tadahiko Shinshi. 2022. "Estimation of the Dynamic Parameters of the Bearings in a Flexible Rotor System Utilizing Electromagnetic Excitation by a Built-In Motor" Actuators 11, no. 1: 1. https://doi.org/10.3390/act11010001
APA StyleChen, Y., Yang, R., Sugita, N., Zhong, J., Mao, J., & Shinshi, T. (2022). Estimation of the Dynamic Parameters of the Bearings in a Flexible Rotor System Utilizing Electromagnetic Excitation by a Built-In Motor. Actuators, 11(1), 1. https://doi.org/10.3390/act11010001