1. Introduction
With rising concerns over global environmental and energy issues, the automotive industry has started to focus on electric vehicles (EVs) in recent years since they have the advantages of zero emissions and high efficiency. However, the driving range of EVs is limited compared with fuel vehicles. The regenerative braking system is capable of effectively improving energy efficiency by converting the vehicle’s kinetic energy into electric energy during braking procedures. Studies show that in urban driving situations, about one-third to one-half of the energy of the power plant is consumed during the deceleration process [
1,
2,
3]. Regenerative braking has become a popular area of research for improving the energy efficiency of EVs [
4]. Due to the limited braking torque of a regenerative braking system, a friction braking system is still needed to ensure the vehicle’s braking performance. Thus, most vehicles adopt a blended braking system.
Compared with the conventional friction braking system, the blended braking system is able to recover energy and responds quickly. However, in contrast to the conventional friction braking system, the blended braking system comprises different braking systems with quite different dynamic characteristics. For example, the motor’s brake torque responds quickly and accurately. The blended braking system has three different braking states: Friction braking, motor braking, and hybrid braking. These three braking states may occur independently or frequently alternate during one braking procedure [
5,
6,
7]. The coordinated control of the blended braking system is a difficult task.
For commercialized EVs with motor braking, the braking torque distribution is based on the braking situation. When the vehicle enters an emergency braking situation, the motor braking torque is removed quickly, and the friction braking system completely takes over the ABS control [
5,
6]. The cooperative control of motor braking and friction braking during the normal braking process has also attracted wide attention and inspired many studies [
7,
8,
9,
10,
11,
12,
13,
14]. When the vehicle enters a normal braking situation, the motor braking torque and friction braking torque are distributed according to a certain proportion [
6,
7]. The cited studies do not take the dynamics of braking actuators into consideration. However, the dynamics of actuators have a significant effect on the stability of vehicle braking control and should not be ignored.
The effect of the flexibility of an electric drivetrain on the blended brake control performance was analyzed in [
15,
16]. Blended braking control algorithms with compensation for the powertrain flexibility were developed using an extended Kalman filter. The output braking torque of the friction braking system was estimated by the extended Kalman filter. However, the input time-delay was not taken into consideration in [
15,
16]. In [
17], the sliding mode control and an optimal braking torque distribution strategy were proposed. For the braking torque distribution, the dynamics of the motor braking system and friction braking system were analyzed. However, the output braking torque of the friction braking system and input time-delay were treated as measurable and known [
17]. In fact, these two parameters are hard to obtain directly in real applications.
In friction braking systems, such as the hydraulic braking system, there is a gap between the actuator and the brake disc. This gap increases with the wear of materials, which changes the input time-delay of the friction braking system. Thus, the input time-delay of the friction braking system must be estimated. In addition, the output braking torque of the friction braking system cannot be directly measured in the blended braking system. To the best of the authors’ knowledge, no research has reported the simultaneous observation of the input time-delay and output braking torque of a friction braking system in a blended braking system. There are some research papers on the time-delay and state observer design [
18,
19,
20]. However, they focus on the disturbance [
19] and single-input single-output (SISO) system [
20]. This approach is not suitable for the blended braking system since blended braking is a multi-input single-output system.
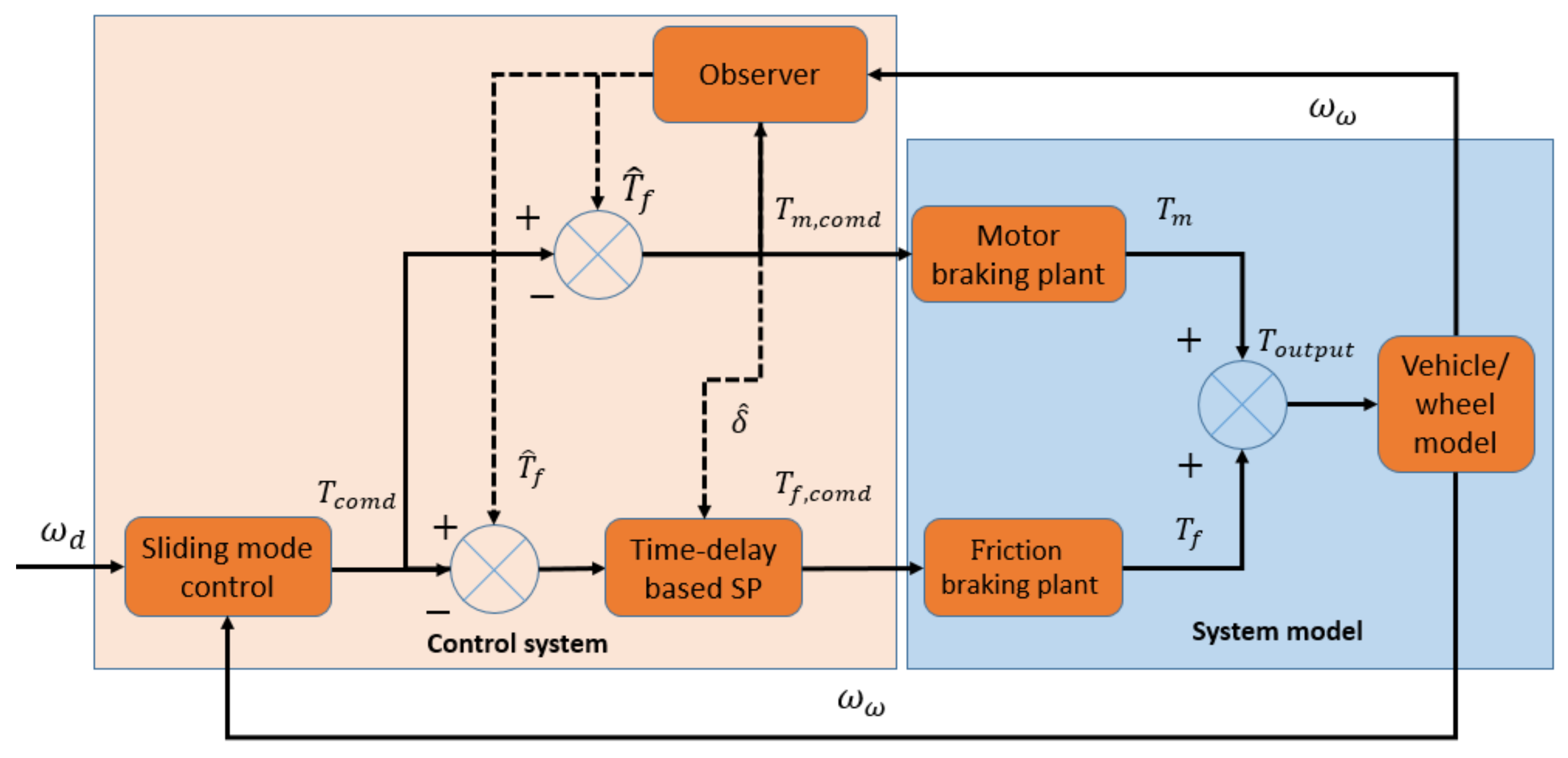
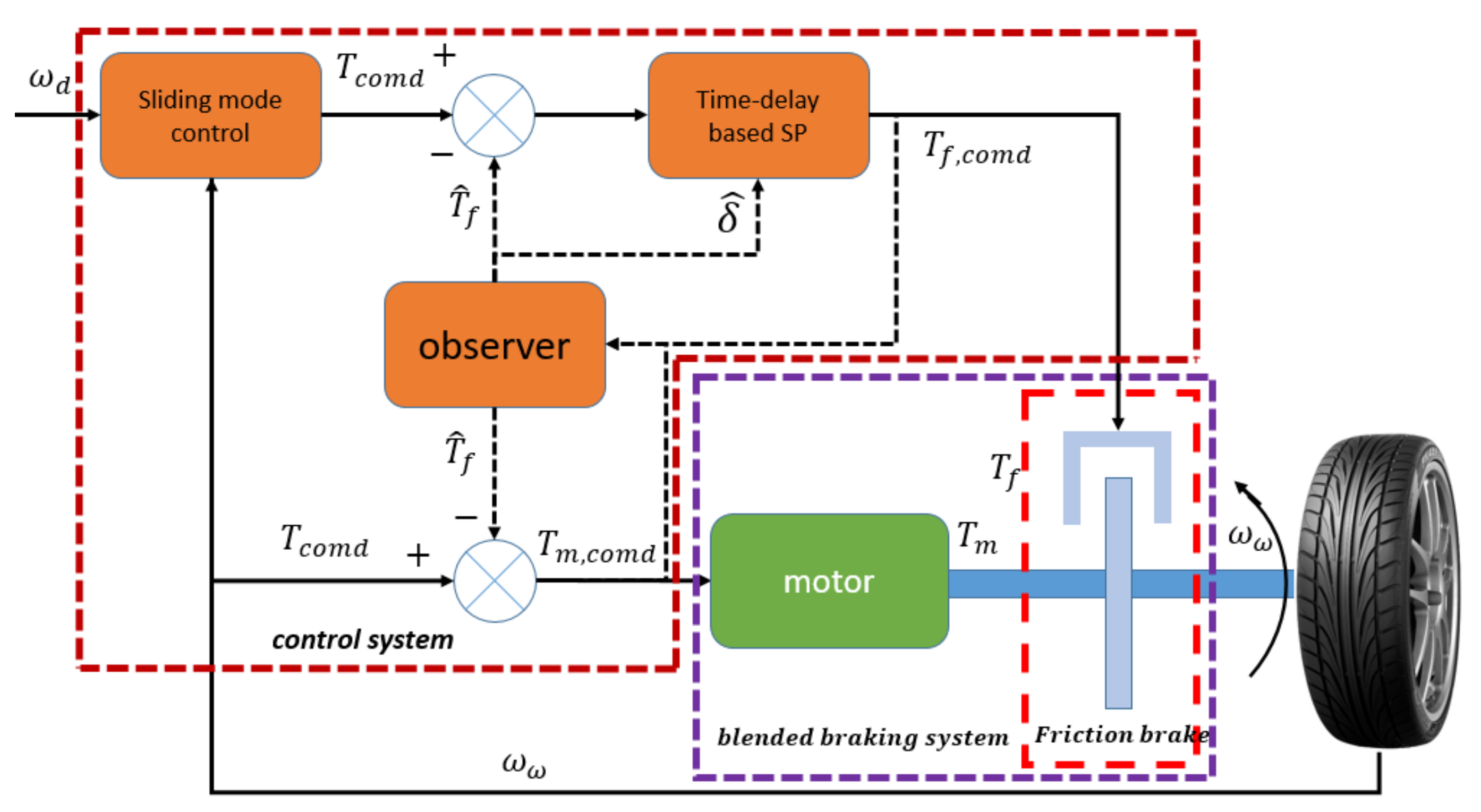
The main contributions of this paper are three-fold. First, an observer is designed for the blended braking system. The observer is able to simultaneously estimate the output braking torque and input time-delay of the friction braking system in the blended braking system. Second, the time-delay-based Smith Predictor control is implemented in the friction braking system. The last contribution is the new blended braking system control structure. It makes full use of the advantages of sliding mode control (i.e., strong anti-interference and rapid response), the motor braking system (i.e., fast response speed), and the friction braking system (i.e., large braking torque). As a result, the blended braking system is able to effectively track the desired braking performance.
The remaining sections of this paper are organized as follows. First, the system model is introduced, including models of quarter-vehicle dynamics, motor braking dynamics, and friction braking dynamics. Second, the braking control strategy is introduced. The braking control strategy includes sliding mode control to achieve the desired braking performance, an observer to estimate the input time-delay and output braking torque of the friction braking system, and time-delay estimation-based Smith Predictor control for the friction braking system control. Then, the simulation results are presented. Finally, conclusions are provided in the last section.
2. Vehicle Model
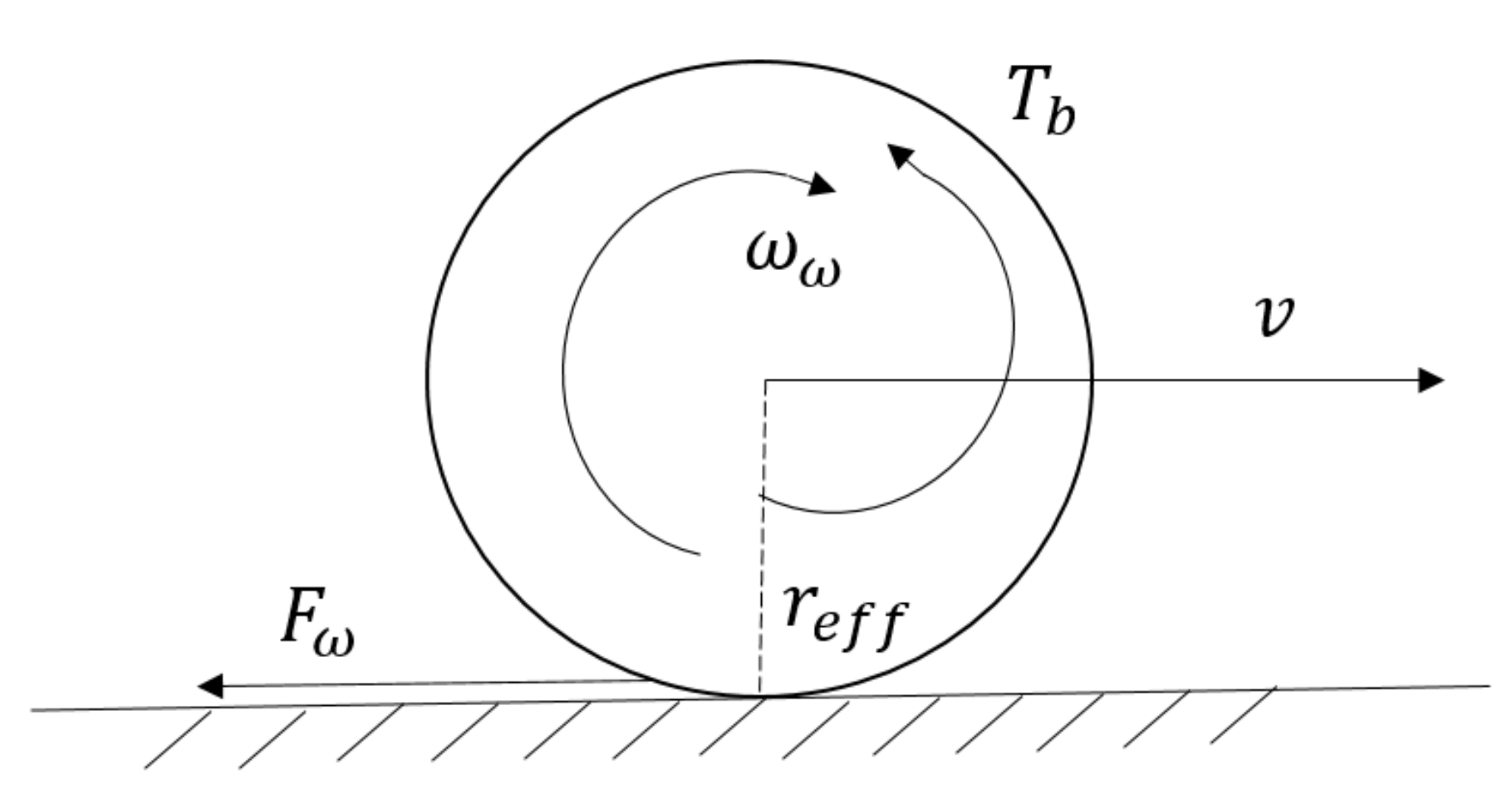
In this paper, the braking system of each independently controlled wheel is treated as a research object. For convenience, a quarter-vehicle model is adopted. The quarter-vehicle model, which is simple but effective (see
Figure 1), is used, and only the longitudinal force is considered in this paper.
The quarter-vehicle blended braking system is shown in
Figure 2. As shown in
Figure 2, each wheel is equipped with a blended braking system: A motor braking system and a friction braking system.
In this paper, the normal braking situation is analyzed. During the normal braking process, the wheel slip is small and can be ignored. Then, the rotational speeds of the four wheels are equal, and the relationship between the wheel speed and vehicle velocity can be written as:
where
is the vehicle speed,
is the wheel speed, and
is the wheel radius. The vehicle speed control can be converted to wheel speed control. In order to achieve vehicle speed control through wheel speed control, the motion inertia of the vehicle should be converted to that of the wheel [
21]. According to the law of conservation of energy, the equivalent moment of inertia can be obtained:
where
is the equivalent moment of inertia,
is the mass of the quarter-vehicle, and
is the moment of inertia of the wheel. Then, the equivalent moment of inertia can be obtained:
Then, the dynamics control of the quarter vehicle can be converted to the dynamics control of the wheel (as shown in
Figure 2). The dynamics of the wheel can be expressed by the following equations:
where
is the total braking torque acting on the wheel,
is the output braking torque of the friction braking system,
is the output braking torque of the motor braking system,
is the wheel viscous friction force,
is the wheel viscous friction coefficient, and
is the gravitational acceleration. When the driver makes a braking action, the desired vehicle braking deceleration can be converted to the desired wheel braking deceleration according to the following equation:
where
is the desired vehicle deceleration speed, and
is the desired wheel deceleration. According to the desired vehicle deceleration speed and the initial braking speed of the vehicle, the desired vehicle speed can be obtained. Then, the desired wheel speed can be calculated.
As shown in
Figure 2, the blended braking system comprises a motor braking system and friction braking system. Regarding the effect of the electric system dynamics, the motor braking system can be modeled as a first-order reaction, with a short time constant
being taken into consideration [
22]. It can be expressed as follows:
where
is the output braking torque of the motor braking system,
is the command braking torque of the motor braking system, and
is the time constant of the motor braking system. In the friction braking system, there is a gap between the brake disc and the brake actuator. When the command braking torque is released, the brake actuator has an empty stroke. The braking torque response is approximated by a first-order system with a time delay [
22]:
where
is the command braking torque of the friction braking system,
is the output braking torque of the friction braking system,
is the dominant time constant of the friction braking system, and
is the pure time-delay. The relevant parameters are listed in
Table 1.
4. Simulation Results
In this paper, a blended braking system comprising motor braking and friction braking is the research object, of which the related parameters are listed in
Table 1.
To the best of the authors’ knowledge, there is little research on an observer that simultaneously estimates the input time-delay and output braking torque of a friction braking system. Therefore, we first tested the designed observer.
As discussed in relation to the wheel speed control, the command braking torque of the motor can be any value, and the derivative of the command braking torque of the friction braking system should not be 0: . In these tests, the command braking torque of the friction braking system is set as a ramp signal: The slope is 10, and the initial value is . The command braking torque of the motor is a constant number: . The initial wheel speed is set to , the initial braking torque of the friction braking system is , and the initial braking torque of the motor braking system is . The initial estimated states are , . To test the observer, three groups of simulation experiments were performed.
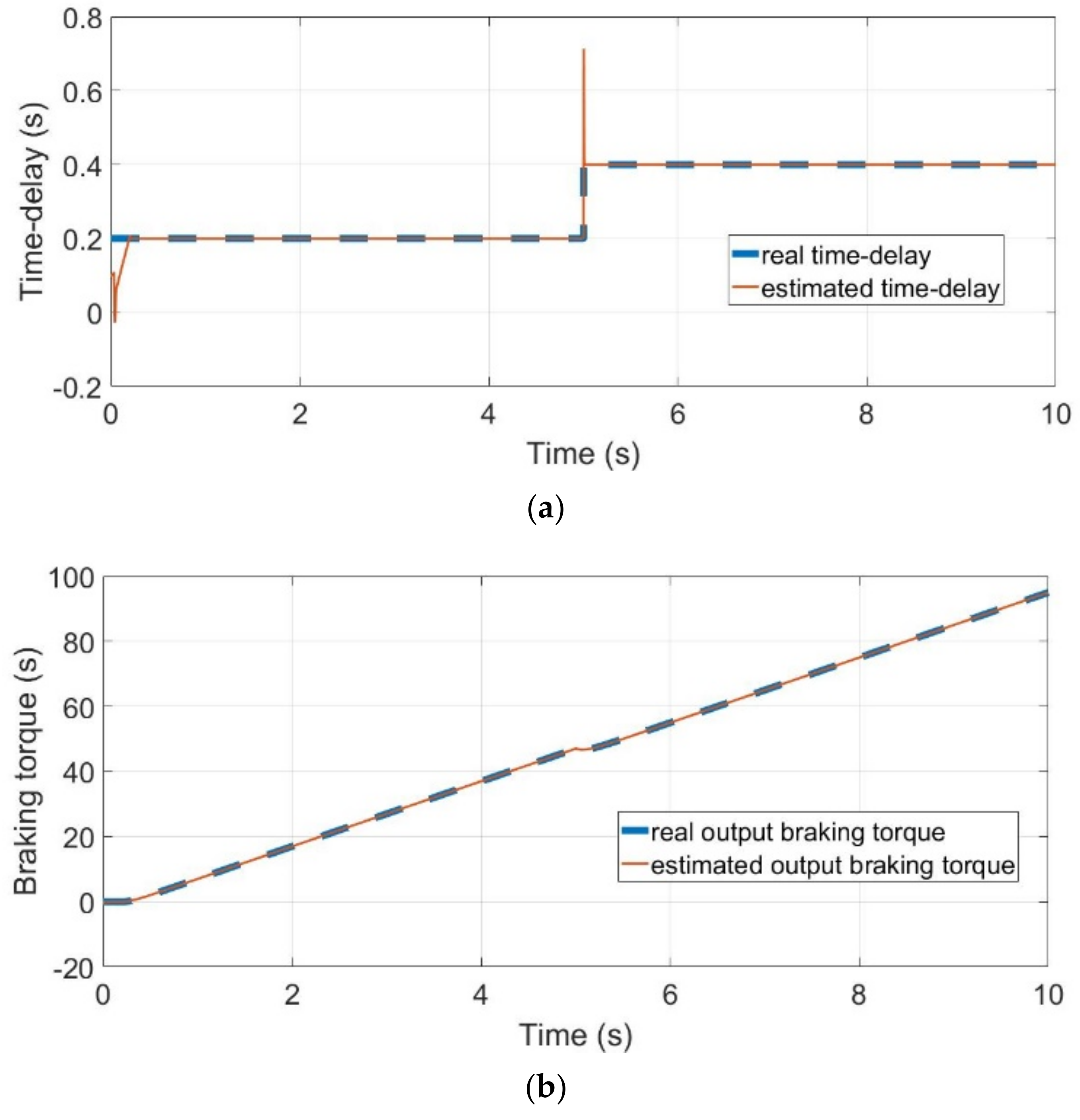
In the first group of the simulation experiments, the input time-delay is set to a constant value of
. The simulation results are shown in
Figure 6a,b.
As shown in
Figure 6a,b, the designed observer is able to accurately estimate the input time-delay and the output braking torque of the friction braking system. As shown in
Figure 6a, the proposed observer is able to quickly estimate the input time-delay (it is a practical value and is reported as the real time-delay in the simulation results). The output braking torque is 0 during the initial stage (as shown in
Figure 6b). This is due to the fact that the actuator has an input time-delay (
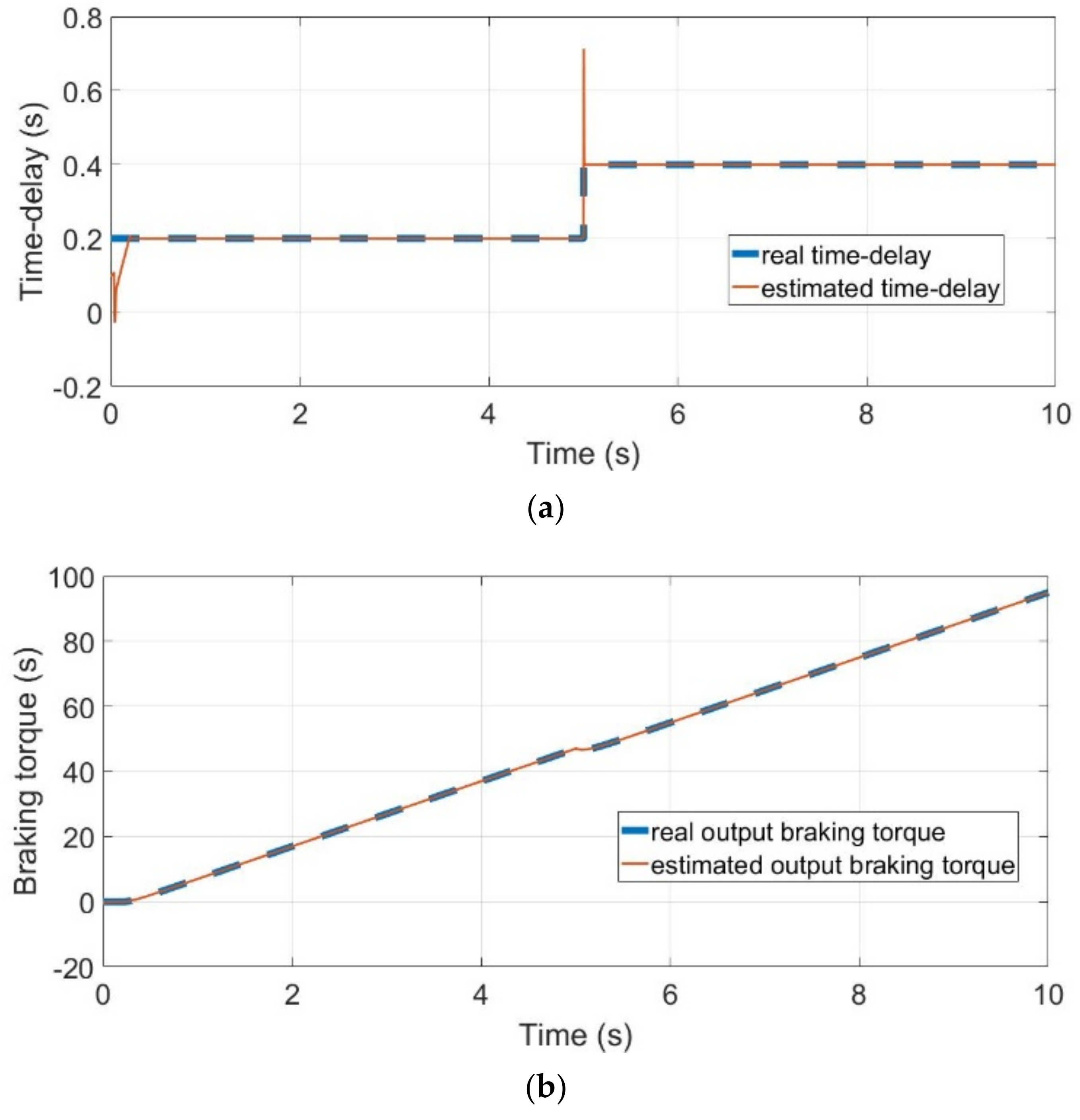
). This proves that the observer is able to effectively estimate the braking torque of the friction braking system. In order to further verify the effectiveness of the observer and test its estimation ability in the case of a sudden change in the input time-delay parameter, we set up an experiment in which the input time-delay signal is set to 0.2
s for the first 5 and 0.4
s for the subsequent 5
s. The simulation results are shown in
Figure 7a,b.
Due to the sudden change in the input time-delay signal, there is an overshoot in the estimated input time-delay at around 5
s. It can be seen from
Figure 7a that the designed observer is able to estimate the input time-delay even if the input time-delay changes.
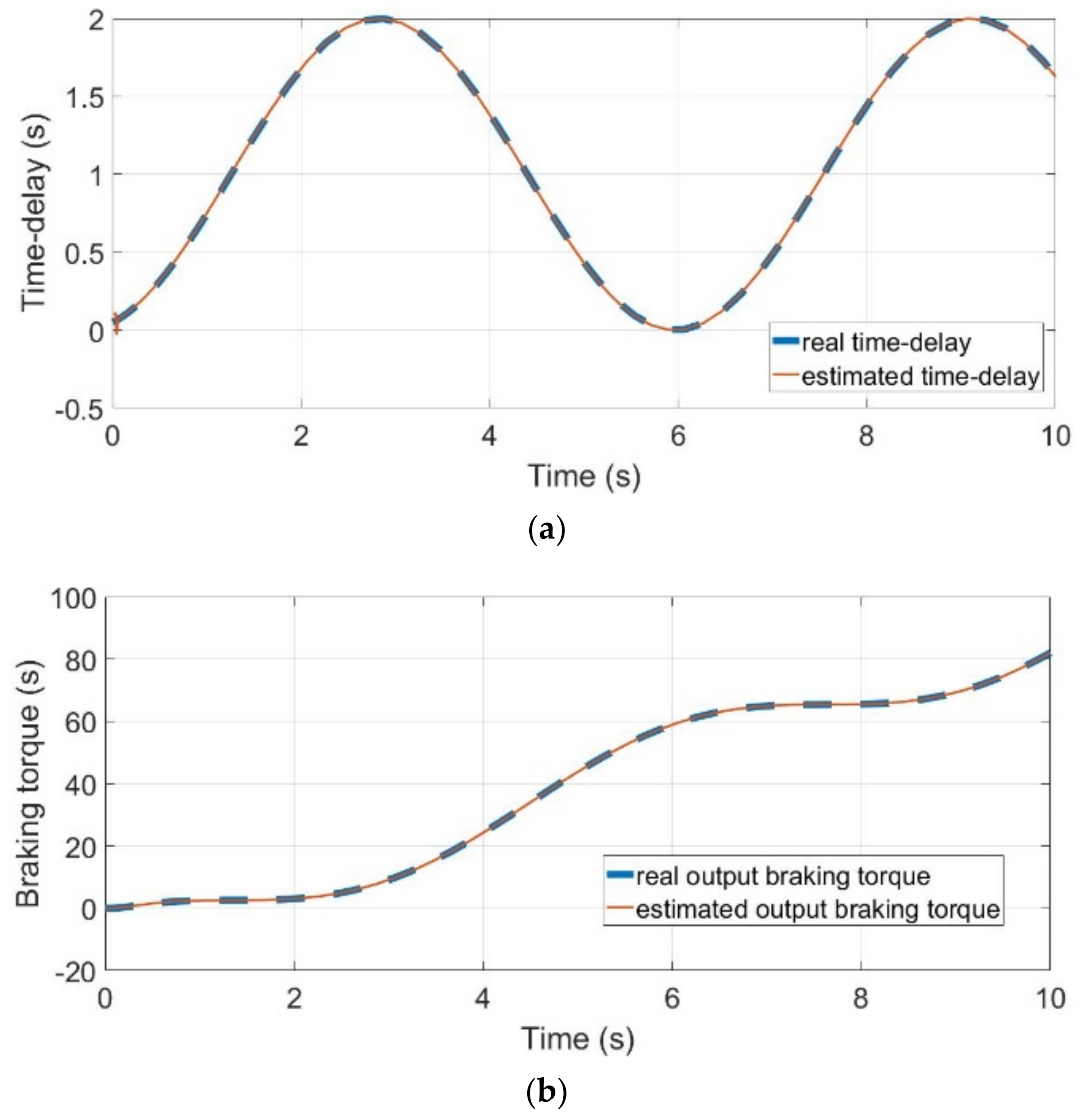
Figure 7b proves that the designed observer can accurately estimate the output braking torque of the friction braking system even if the input time-delay changes during the braking process. During the initial stage and at about the fifth second, the braking torque does not change. This is due to the fact that the actuator has a time delay, and the input time-delay changes at the fifth second. To further verify the effectiveness of the observer, the input time-delay signal is set to a sinusoidal signal. The simulation results are shown in
Figure 8a,b.
As shown in
Figure 8a,b, the observer is able to estimate the input time-delay and output braking torque of the friction braking system, even if the input time-delay signal changes with time as a sinusoidal signal. All of these tests prove that the designed observer is able to effectively estimate the input time-delay and output braking torque of the friction braking system in many different situations.
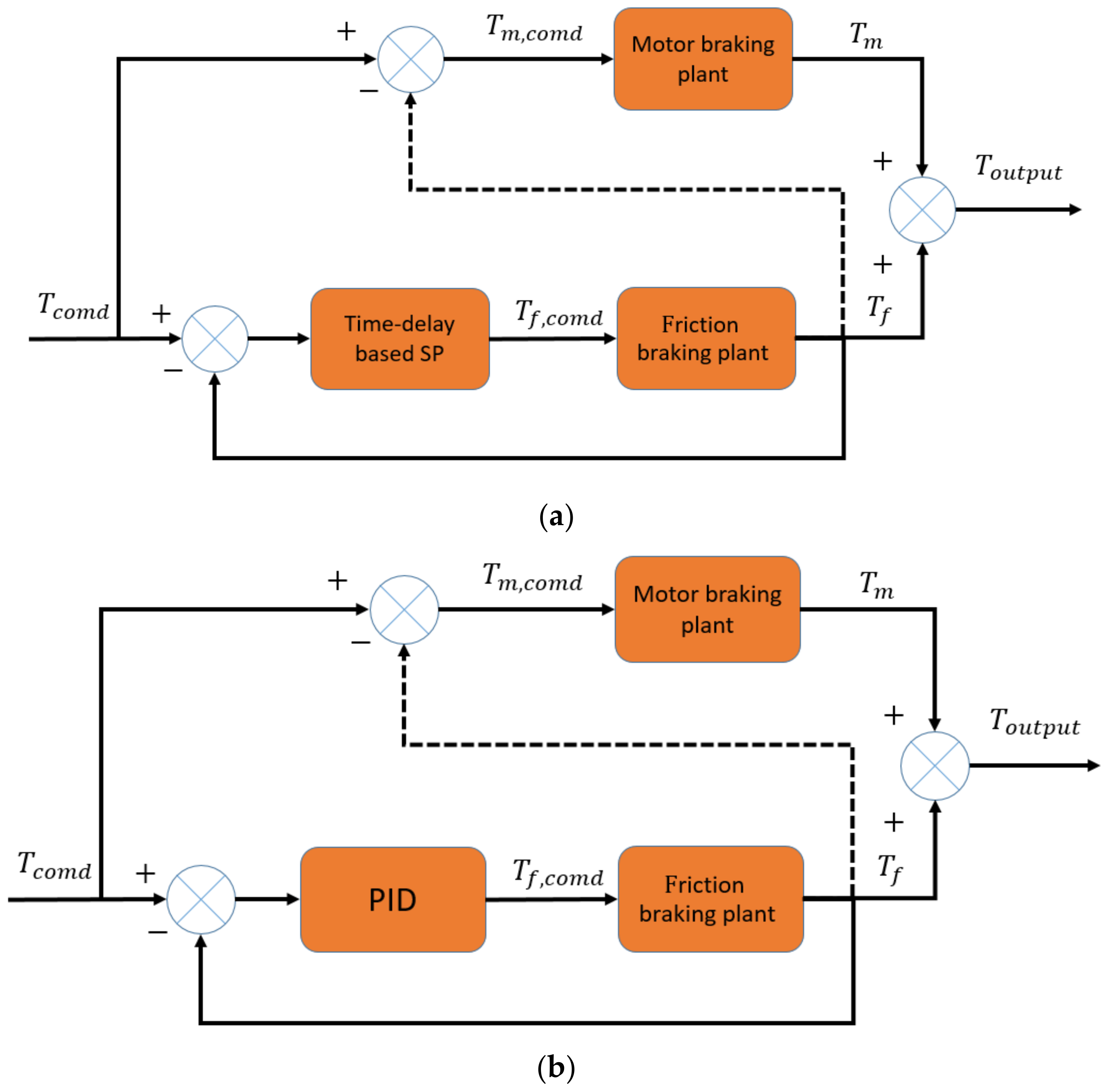
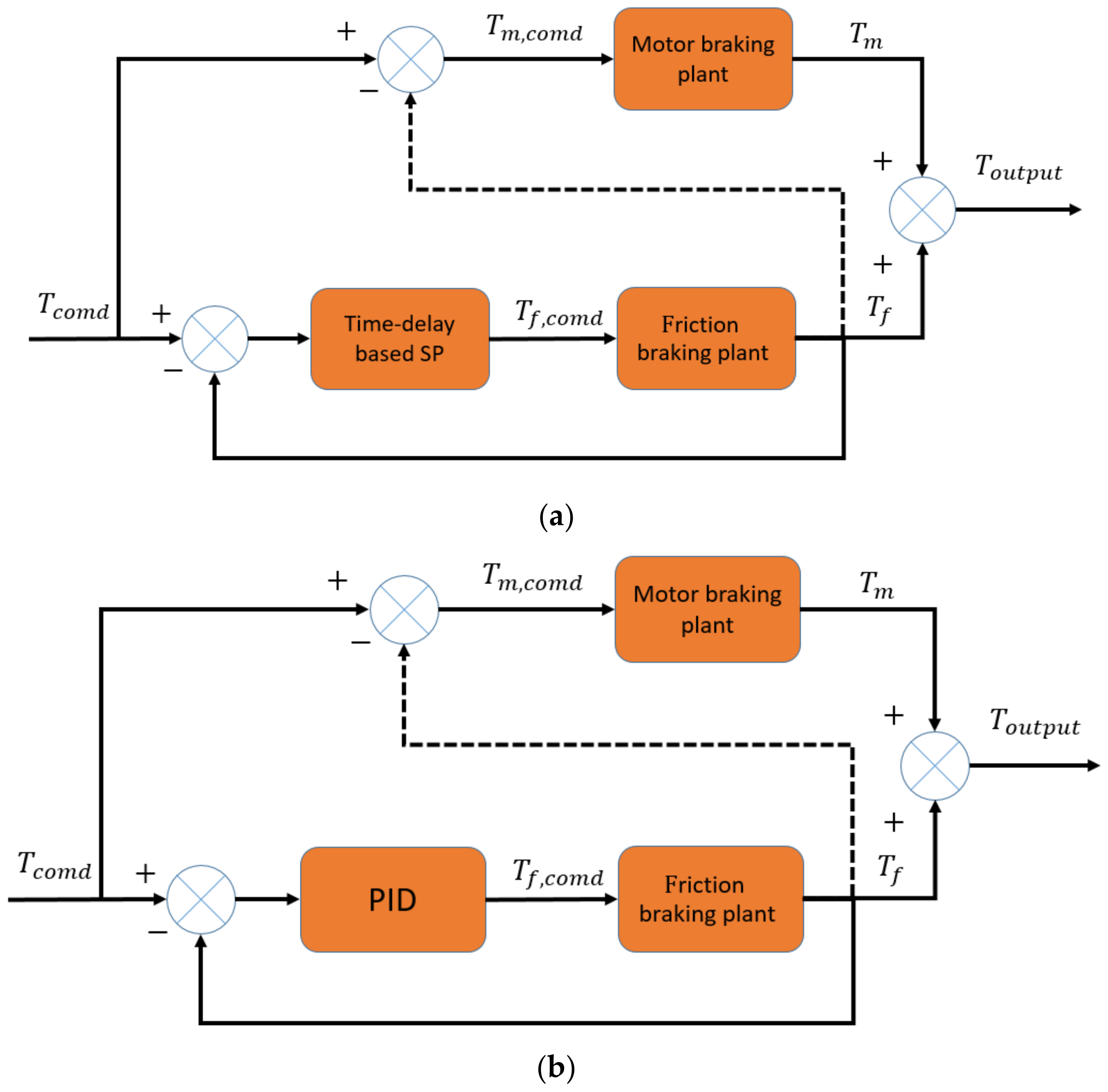
In the second set of simulation tests, the input time-delay-based Smith Predictor controller was tested, and PID control was adopted for comparison. For this test, the input time-delay is set to
, and other braking system parameters are shown in
Table 1. The control structures are shown in
Figure 9a,b. The difference between these two structures is the controller. The input time-delay-based Smith Predictor controller is shown in
Figure 9a. In this test, it is assumed that the input time-delay of the friction braking system is known and is directly used in the input time-delay-based Smith Predictor controller. The PID controller is shown in
Figure 9b. Since the response speed of motor braking is fast and the motor usually has a proprietary controller, the motor control is not taken into consideration. In this paper, the maximum braking torque of motor braking is set to
.
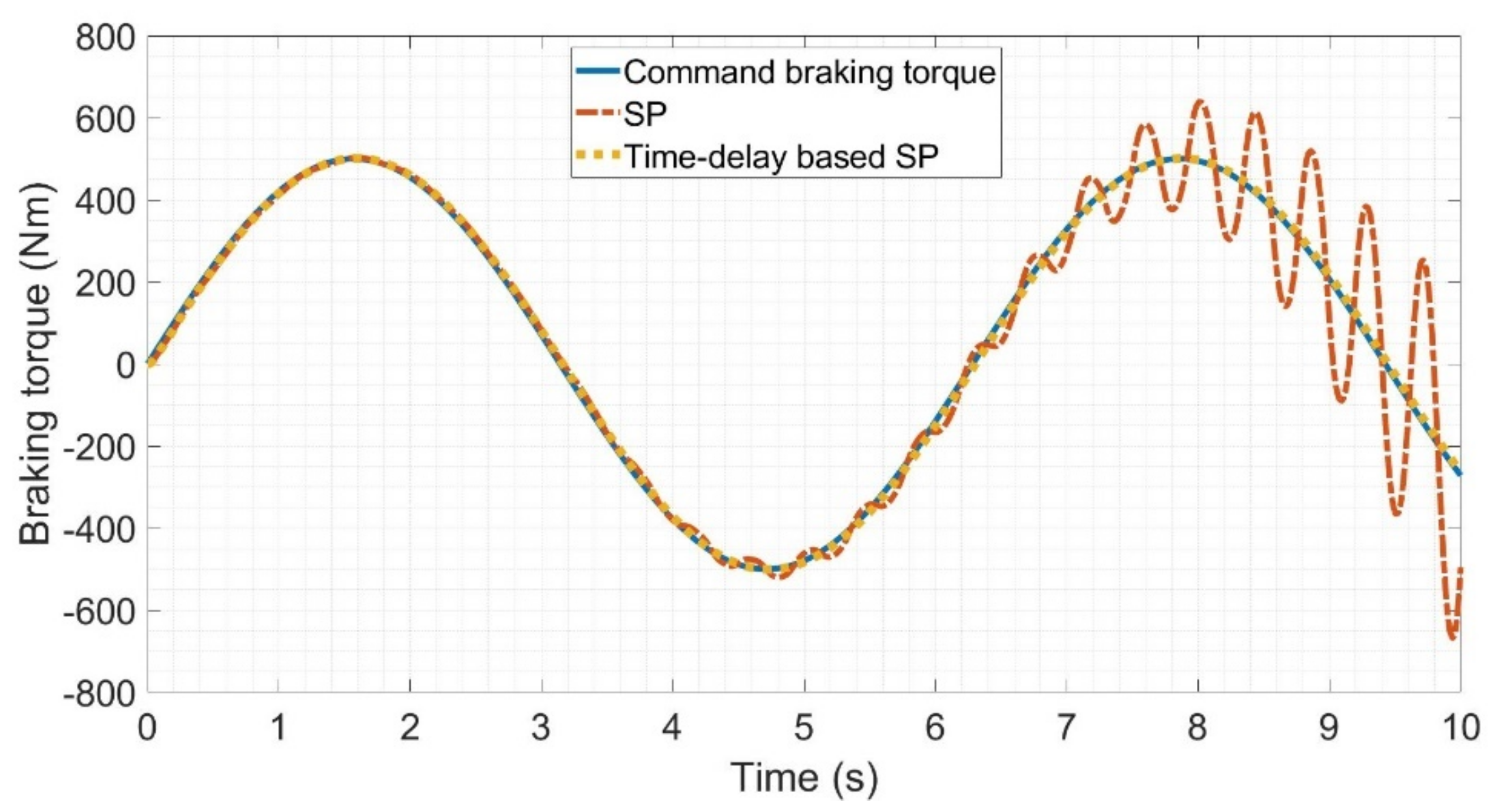
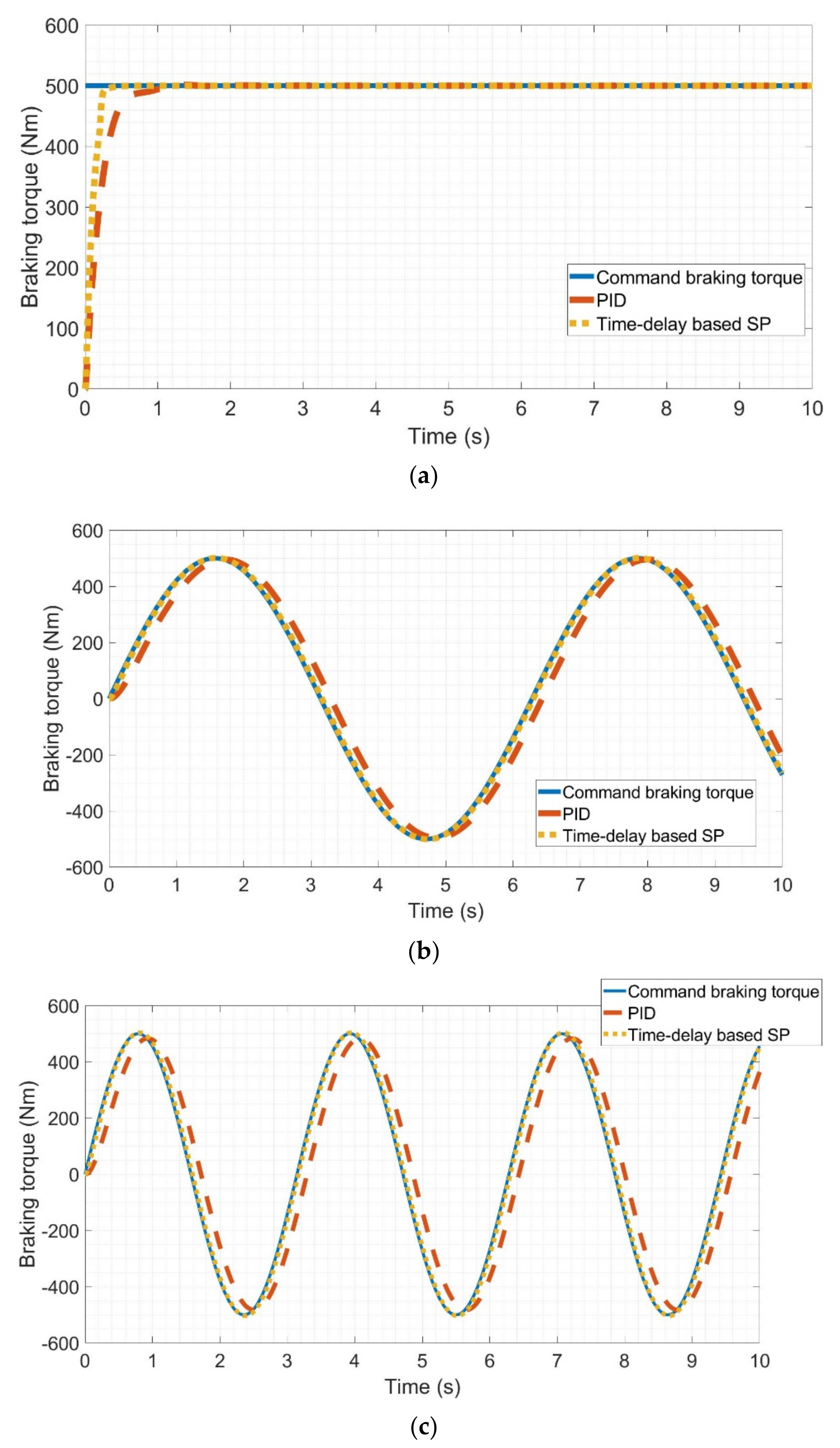
In order to compare the tracking performance of the two control algorithms in the blended braking system, two kinds of signals are used as the command signal. As shown in
Figure 10a–c, the step signal and sinusoidal signals are set as the command signals. The step signal and sinusoidal signal are used to simulate emergency braking and normal braking, respectively. The step signal is used to simulate the rapid depression of the brake pedal, and the sinusoidal signal is used to simulate the process of slowly stepping on and raising the brake pedal. The step command is set to
. Sinusoidal command signals are set with an amplitude of
and a frequency of
,
and a frequency of
. The simulation results are shown in
Figure 10a–c.
It can be seen from
Figure 10a,b that the input time-delay-based SP can effectively track the command braking torque, regardless of the value of the command braking torque. Compared with the PID control for the blended braking system, the input time-delay-based SP has a faster response (as shown in
Figure 10a). As shown in
Figure 10b, the output signal under PID control cannot effectively track the command signal. This is due to the fact that the friction braking system under PID control has a slow response. As a result, the output braking torque of the friction braking system cannot effectively track the command braking torque. As the command braking torque increases, the difference between the command braking torque and the output braking torque increases. When this difference is larger than the maximum braking torque of the motor, the output braking torque of the motor cannot compensate for the difference between the command braking torque and the output braking torque of the friction braking torque. As a result, when the command braking torque is large, it cannot be tracked by the output braking torque of the blended braking system (as shown in
Figure 10b). In contrast to the blended braking system under PID control, the blended braking system under time-delay-based SP control is able to effectively track the command braking torque. This is due to the fact that the friction braking system under the time-delay-based SP control has a faster response. This decreases the difference between the command braking torque and the friction braking system’s output braking torque. In this situation, the braking torque provided by the motor is sufficient to compensate for this difference. Thus, the blended braking system is able to effectively track the command braking system. It can also be seen from
Figure 10c that the proposed control method maintains good tracking performance at a higher frequency.
In order to prove the necessity of obtaining an accurate estimation of the input time-delay, two groups of simulations were performed. In this test, the sinusoidal signal command signal has an amplitude of
and a frequency of
. The simulation model is the same as that in
Figure 9. The input time-delay is
for both the model and time-delay-based SP control. The input time-delay of SP control is
. The simulation results are shown in
Figure 11.
As shown in
Figure 11, the time-delay-based SP is able to effectively track the command braking torque when the input time-delay of the controller is the same as that of the model. It can also be seen that the system becomes unstable when the input time-delay of the controller is different from that of the model. This proves that the accurate estimation of the input time-delay is important for the time-delay-based SP control. For the friction braking system, the distance between the brake disc and the actuator changes with the braking system’s usage time and is hard to measure. Thus, the observer is necessary in this situation. This proves that the designed observer described in this paper is highly relevant.
Finally, the proposed braking control method for the blended braking system (the control structure is shown in
Figure 4) was tested in the case of normal braking.
In order to further verify the effectiveness of the proposed braking control method for the blended braking system (the control structure is shown in
Figure 4), it was tested in a case of normal braking. In this test, vehicle braking during normal braking was tested. The initial wheel speed is
, the input time-delay of the friction braking system is set to
,
or
(in separate simulations), and the desired deceleration speed of the wheel is set to
. The other relevant control parameters are listed in
Table 1. For comparison, PID control is used to replace the time-delay-based SP control as the conventional blended braking systems’ controller (the control structure is shown in
Figure 12). The simulation results are shown in
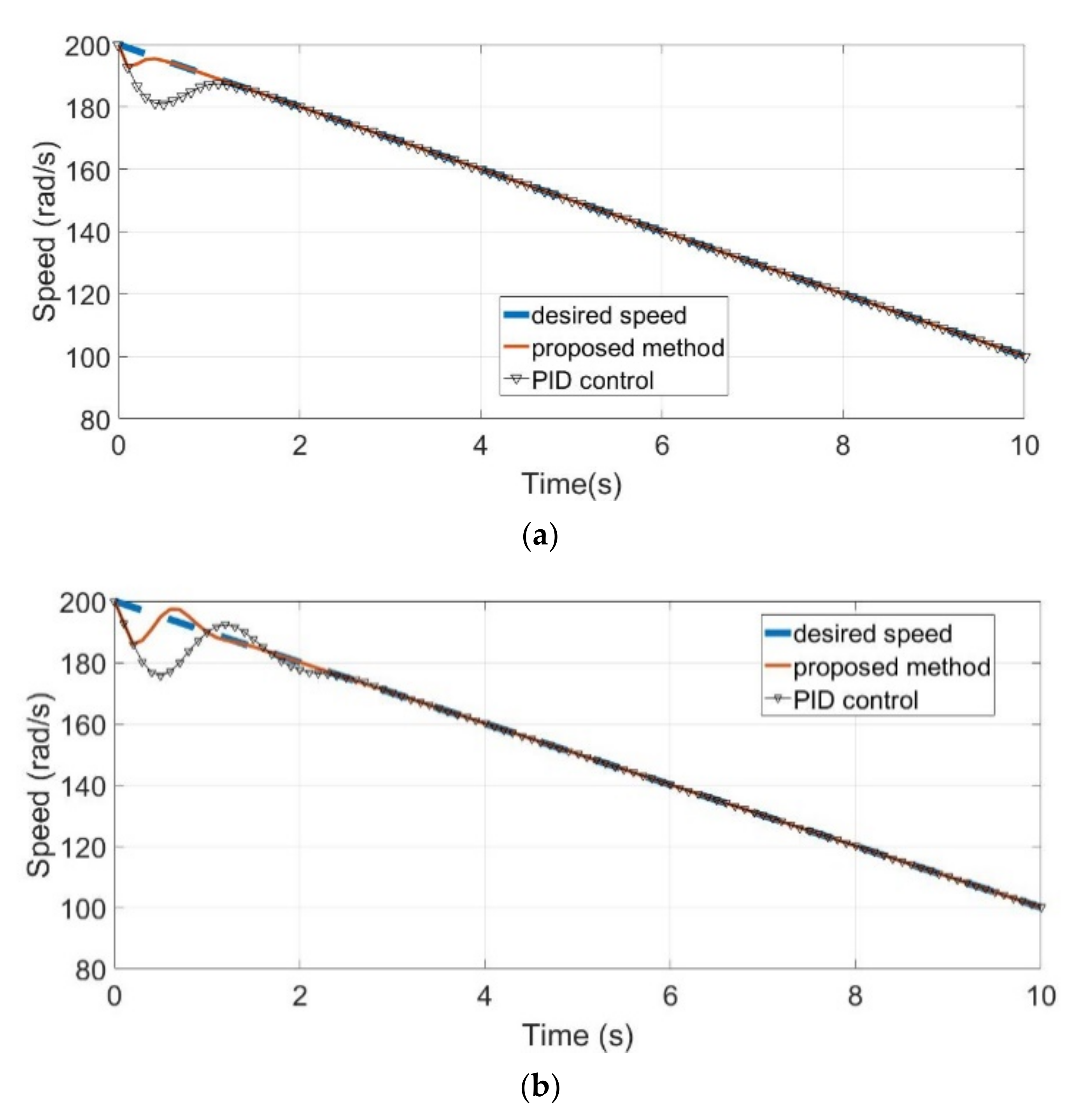
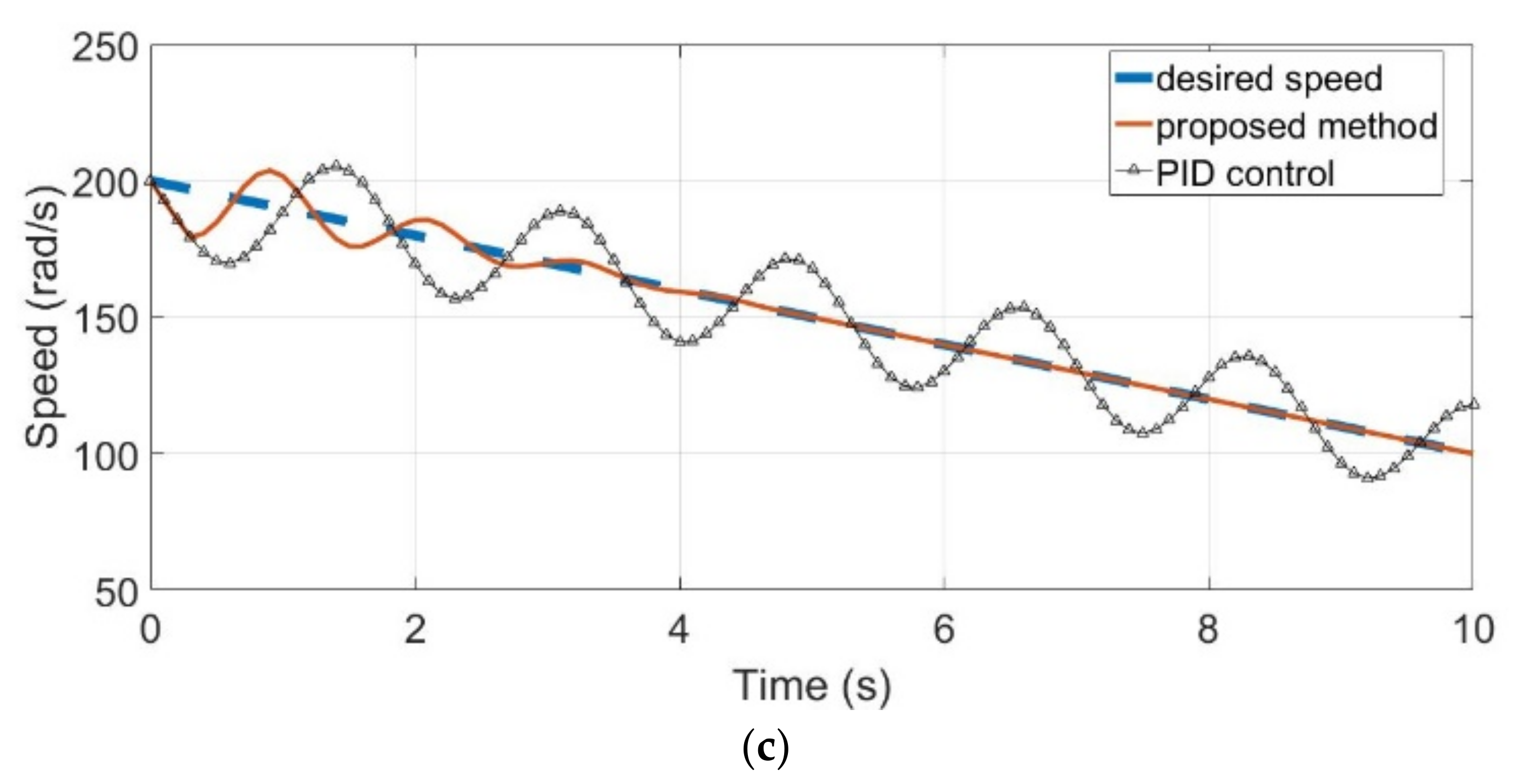
Figure 13.
Figure 13a–c shows the simulation results for time delays of
,
and
, respectively.
The controller’s parameters are adjusted when the time delay is 0.1
s. The relevant control parameters are adjusted so that the performance of the two controllers is as close as possible. As shown in
Figure 13a, with both control methods, the vehicle wheel is able to effectively track the desired speed. When the adjusted control parameters remain unchanged and the input time-delay of the conventional blended braking systems is set to 0.2
s or 0.3
s, the vehicle is still able to effectively track the command signal with the proposed method (as shown in
Figure 13b,c). However, under PID control, the braking command tracking performance becomes worse with the increasing input time-delay of conventional blended braking systems (as shown in
Figure 13b,c). This proves that the proposed method has better tracking performance than the conventional PID control.
As shown in
Figure 13, the proposed method has better tracking performance than the PID control. During the initial stage, there is a tracking error and chattering for the proposed method. This is due to the fact that the observer estimation error exists and the sign function exists in sliding mode control at the initial stage. When the observer obtains the accurate input time-delay and the tracking error of the wheel speed to the desired wheel speed becomes smaller, the proposed method is able to effectively track the command signal (as shown in
Figure 13 after about
). However, the PID control consistently has a lower tracking performance. All of these simulation results prove that the proposed braking control method for the blended braking system is effective and important.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}