
A New Torque Distribution Control for Four-Wheel Independent-Drive Electric Vehicles



Abstract
1. Introduction
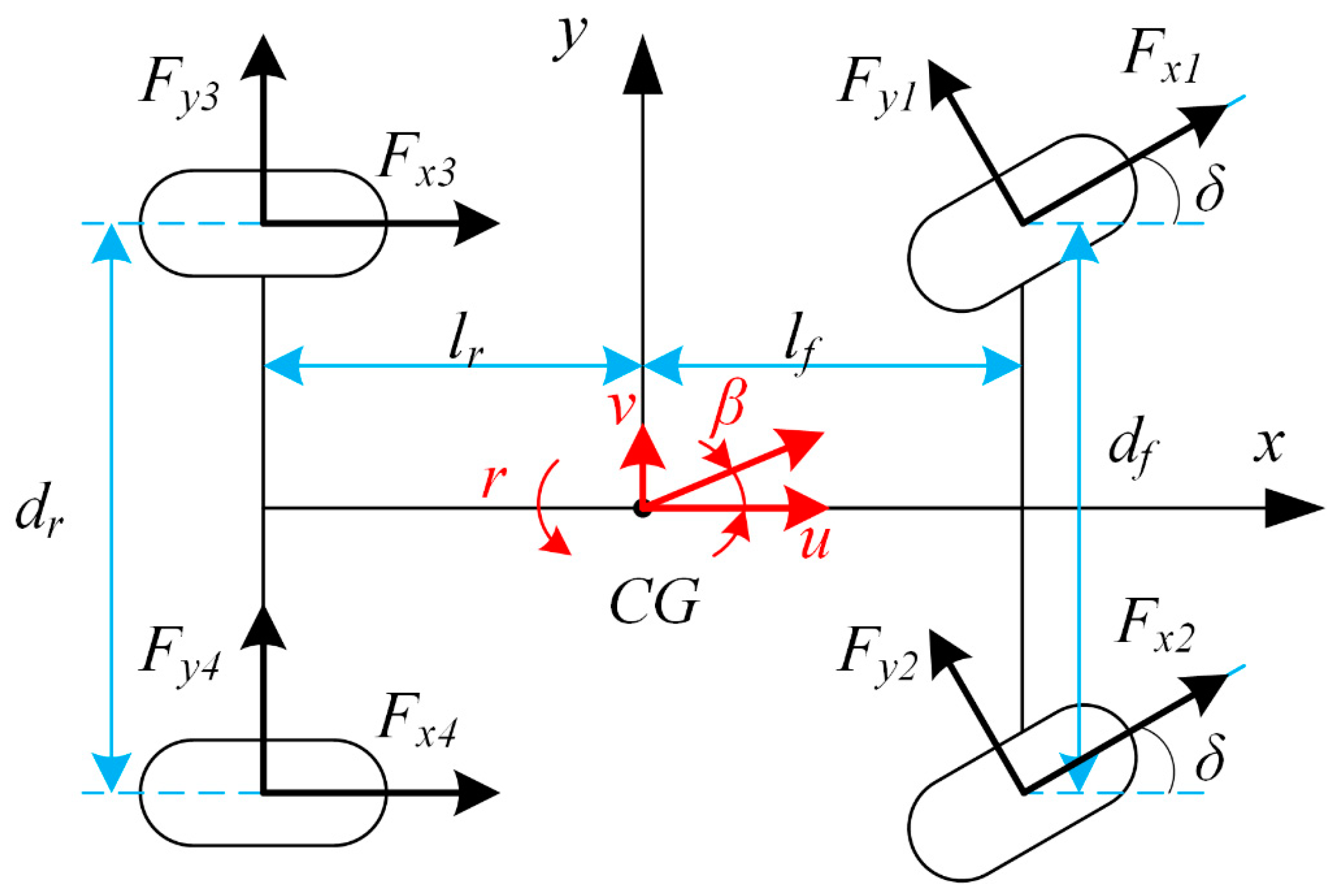
2. Vehicle Dynamic Model
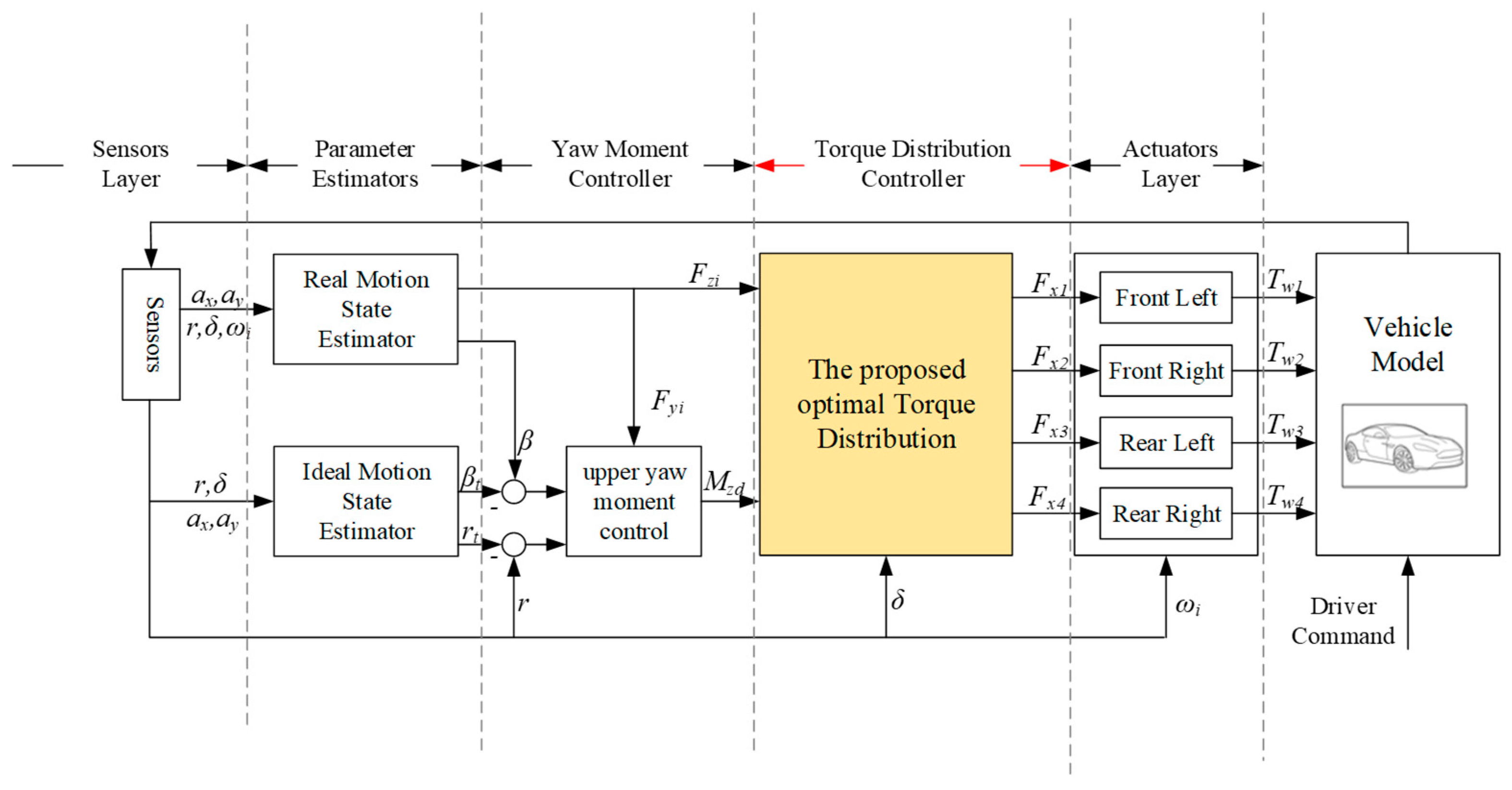
3. Controller Design
3.1. Yaw Moment Controller
3.2. Torque Distribution Controller
4. Simulation and Results
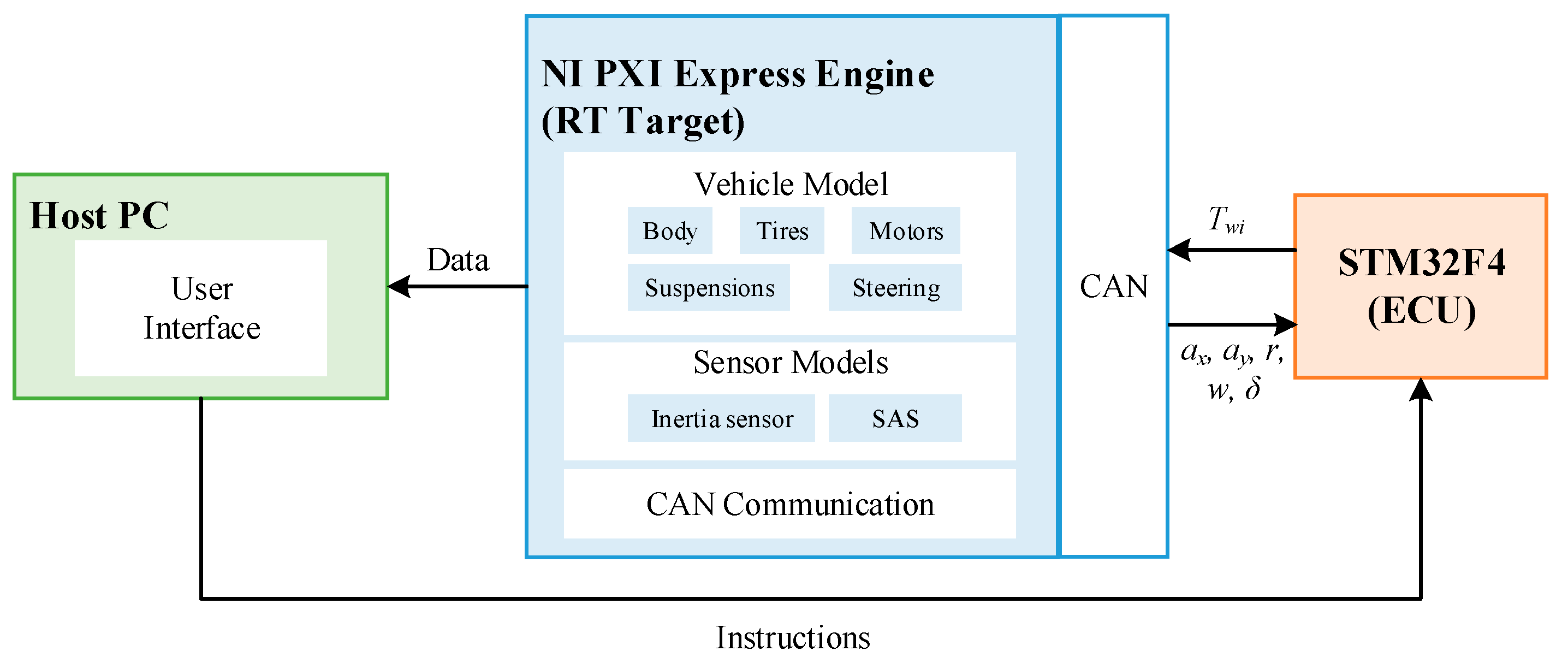
4.1. HIL Simulation System
- NI PXI Express Engine and models: The NI PXI Express engine contains different modular slots to simulate a vehicle model and sensor model. Detailed parameters of the PXI Express engine are provided in Table 2.
- ECU: The ECU is based on STM32F407ZGT6. The C code files of the yaw moment and torque distribution controllers are embedded in the ECU and calculate the target yaw moment and optimal motor torque exerted on each wheel. The step time is set to 5 ms.
- Host PC: The host PC is connected to the PXI Express by an Ethernet cable. The user interface on the PC is used to send a test command and display the vehicle state information.
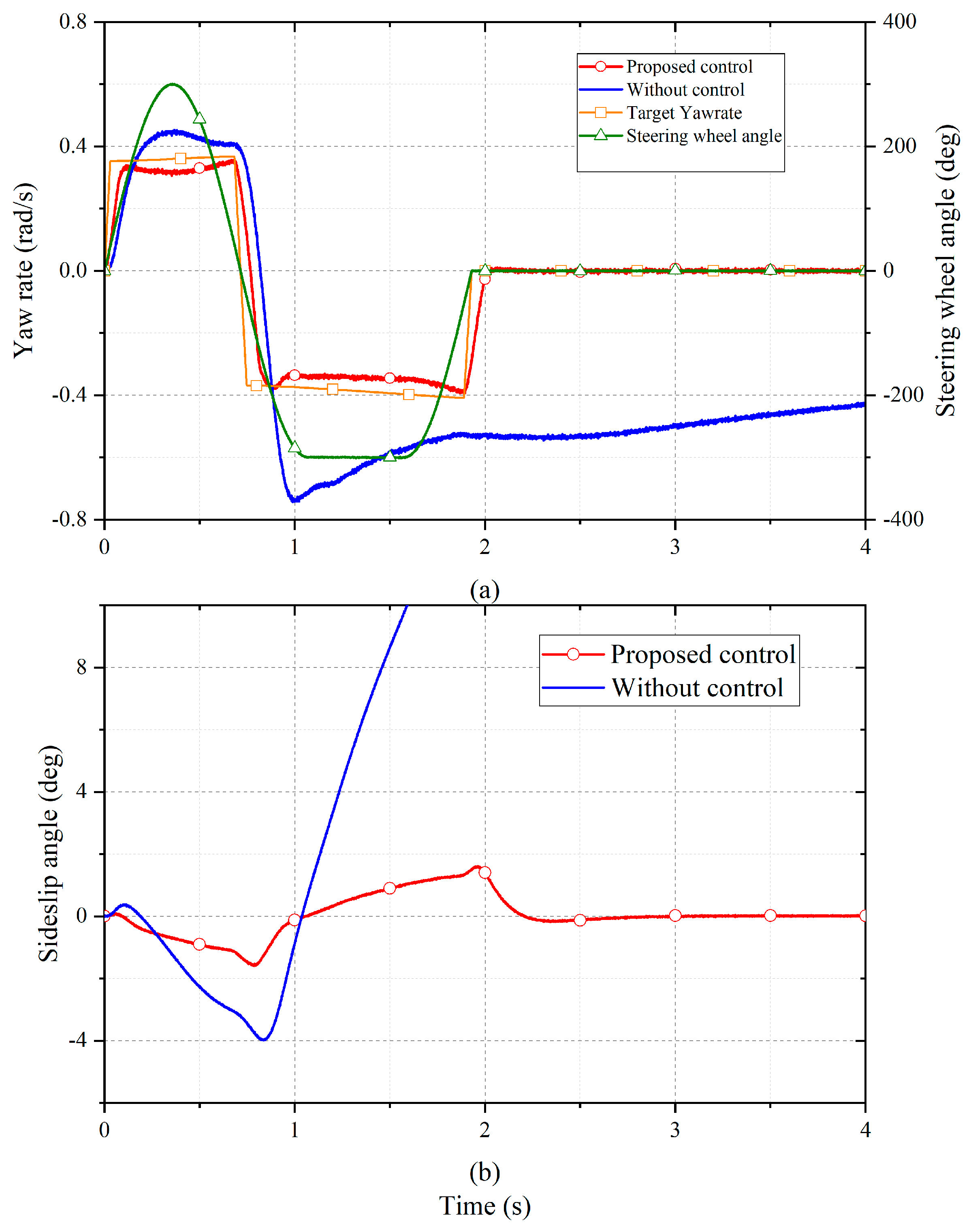
4.2. HIL Simulation Results
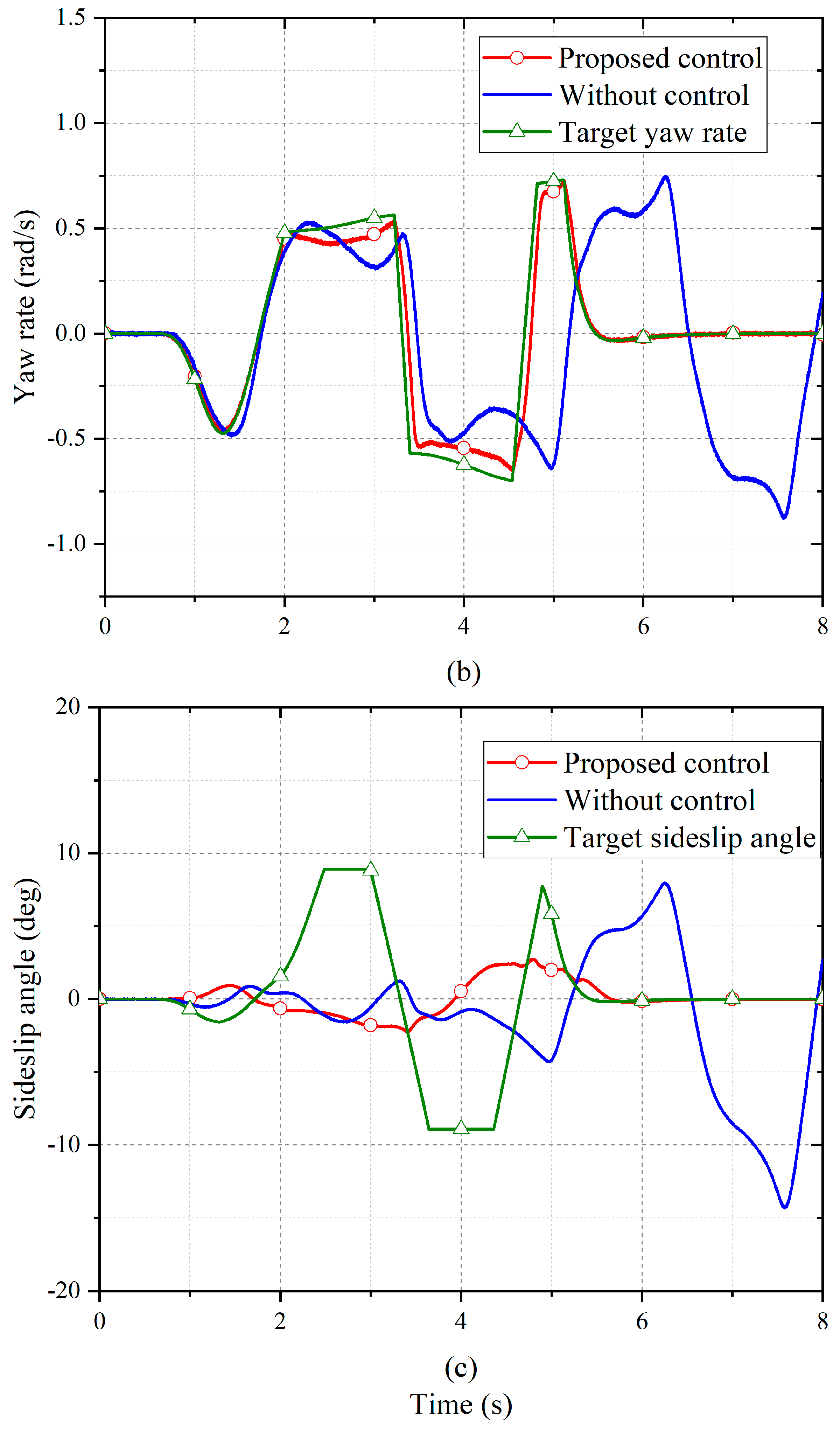
4.2.1. Sine with Dwell
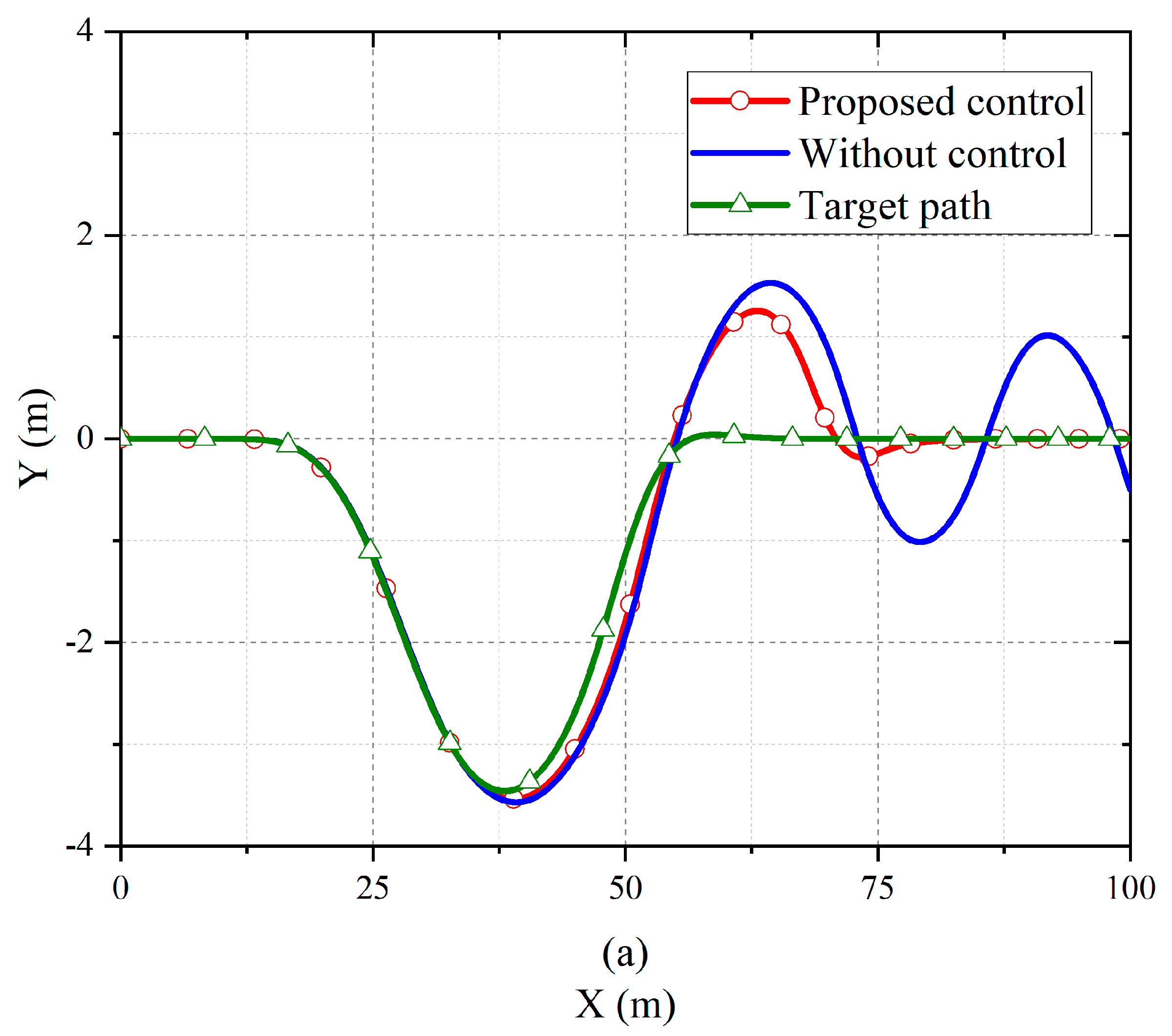
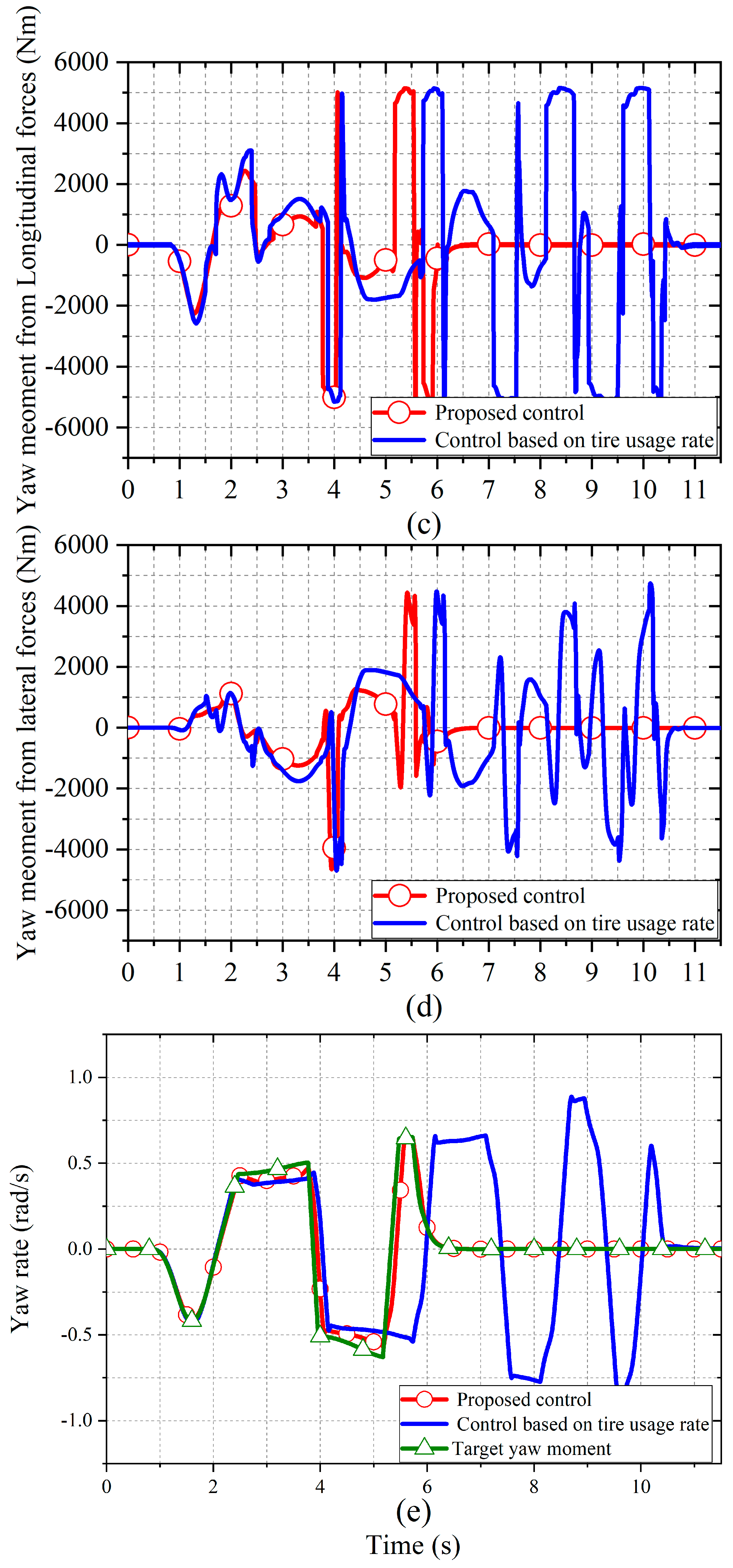
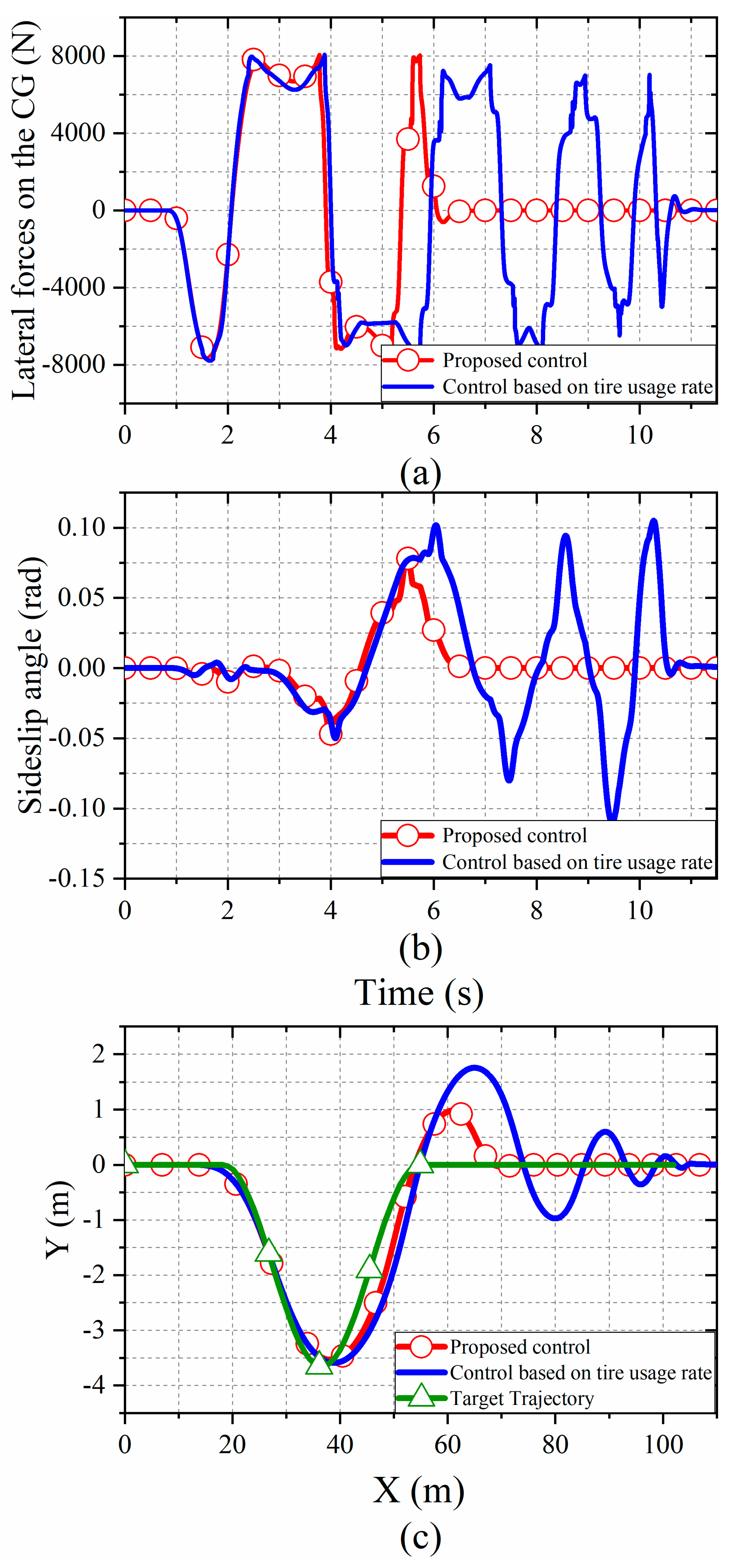
4.2.2. Double Lane Change
5. Analysis and Discussion
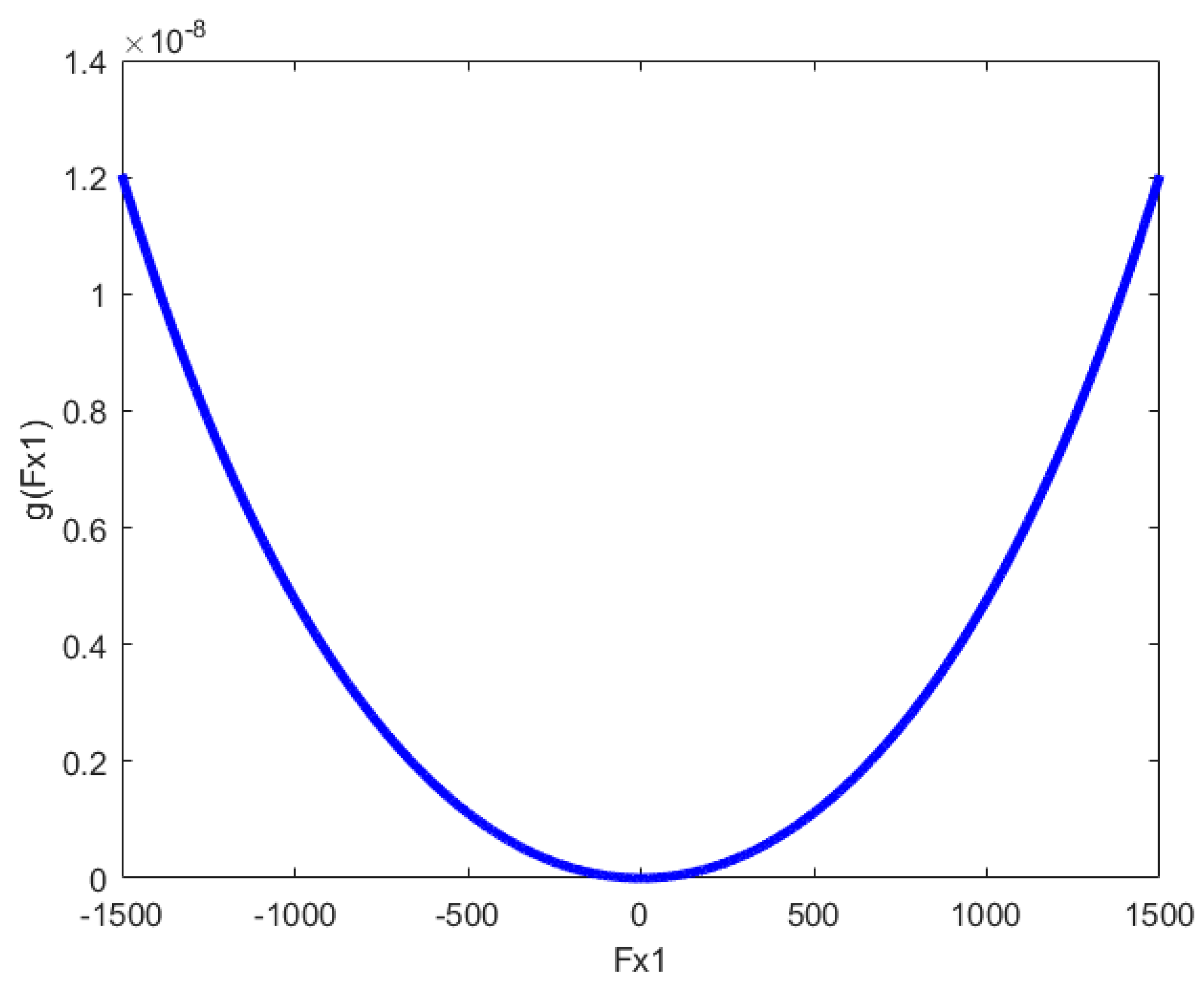
5.1. Global Optimal Proof
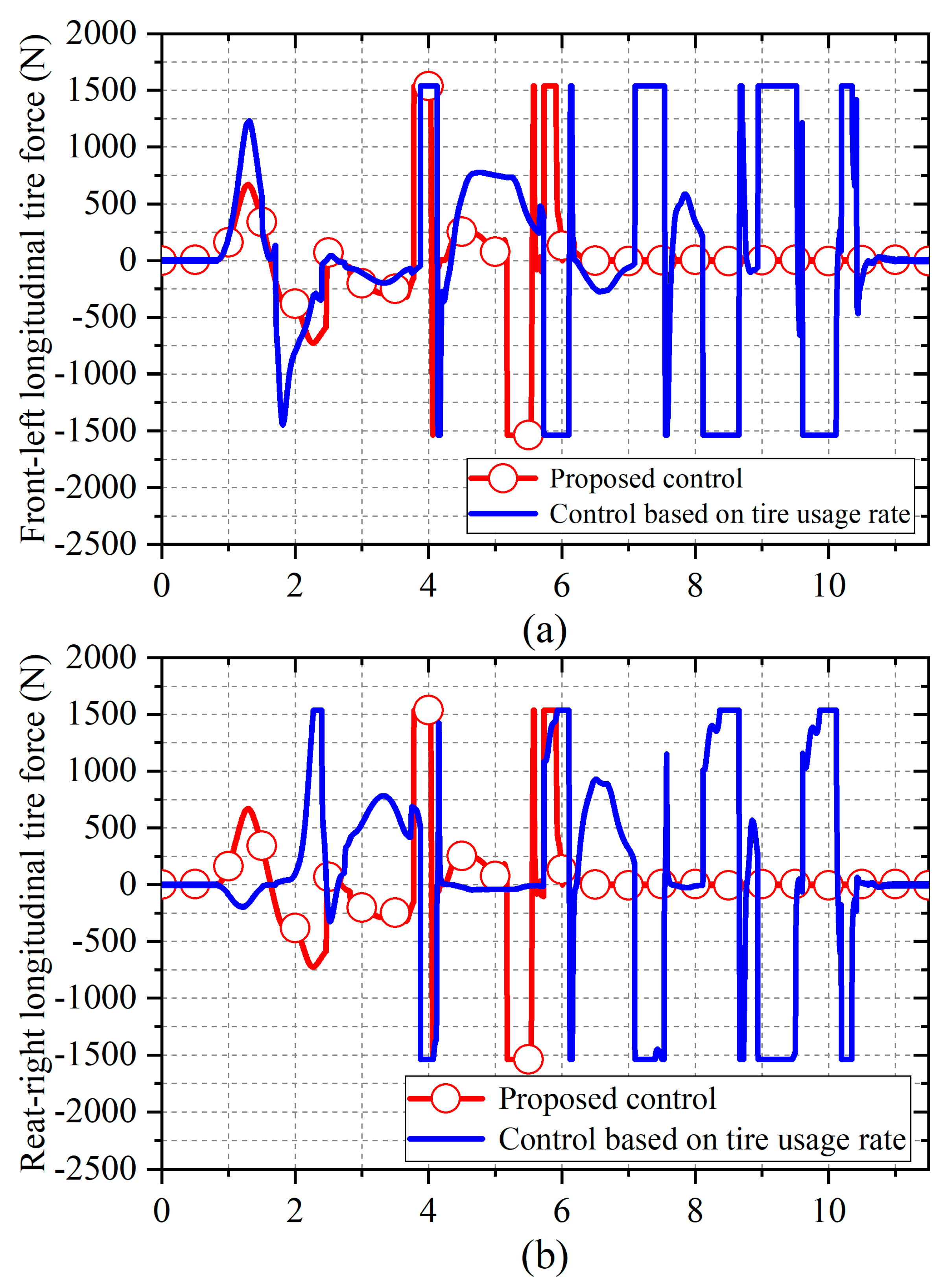
5.2. Control Performance
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Lin, C.-L.; Hung, H.-C.; Li, J.-C. Active Control of Regenerative Brake for Electric Vehicles. Actuators 2018, 7, 84. [Google Scholar] [CrossRef]
- Savitski, D.; Ivanov, V.; Augsburg, K.; Emmei, T.; Fuse, H.; Fujimoto, H.; Fridman, L.-M. Wheel Slip Control for the Electric Vehicle with In-Wheel Motors: Variable Structure and Sliding Mode Methods. IEEE Trans. Ind. Electron. 2020, 67, 8535–8544. [Google Scholar] [CrossRef]
- Zhang, L.; Ding, H.; Huang, Y.; Chen, H.; Guo, K.; Li, Q. An Analytical Approach to Improve Vehicle Maneuverability via Torque Vectoring Control: Theoretical Study and Experimental Validation. IEEE Trans. Veh. Technol. 2019, 68, 4514–4526. [Google Scholar] [CrossRef]
- Hang, P.; Xia, X.; Chen, X. Handling Stability Advancement With 4WS and DYC Coordinated Control: A Gain-Scheduled Robust Control Approach. IEEE Trans. Veh. Technol. 2021, 70, 3164–3174. [Google Scholar] [CrossRef]
- Kasinathan, D.; Kasaiezadeh, A.; Wong, A.; Khajepour, A.; Chen, S.-K.; Litkouhi, B. An Optimal Torque Vectoring Control for Vehicle Applications via Real-Time Constraints. IEEE Trans. Veh. Technol. 2016, 65, 4368–4370. [Google Scholar] [CrossRef]
- Shi, K.; Yuan, X.; Huang, G.; Liu, Z. Compensation-Based Robust Decoupling Control System for the Lateral and Longitudinal Stability of Distributed Drive Electric Vehicle. IEEE/ASME Trans. Mechatron. 2019, 24, 2768–2778. [Google Scholar] [CrossRef]
- Tan, D.; Lu, C. The Influence of the Magnetic Force Generated by the In-Wheel Motor on the Vertical and Lateral Coupling Dynamics of Electric Vehicles. IEEE Trans. Veh. Technol. 2016, 65, 4655–4668. [Google Scholar] [CrossRef]
- Shan, D.; Yin, D. A New Hierarchical Yaw Stability Control Approach for Four-Wheel Independent Driving Electric Vehicles. In Proceedings of the 35th Chinese Control Conference (CCC), Chengdu, China, 27–29 July 2016; pp. 4653–4657. [Google Scholar]
- Park, G.; Han, K.; Nam, K.; Kim, H.; Choi, S.-B. Torque Vectoring Algorithm of Electronic-Four-Wheel Drive Vehicles for Enhancement of Cornering Performance. IEEE Trans. Veh. Technol. 2020, 69, 3668–3679. [Google Scholar] [CrossRef]
- Joa, E.; Park, K.; Koh, Y.; Yi, K.; Kim, K. A Tyre Slip-Based Integrated Chassis Control of Front/Rear Traction Distribution and Four-Wheel Independent Brake from Moderate Driving to Limit Handling. Veh. Syst. Dyn. 2018, 56, 579–603. [Google Scholar] [CrossRef]
- Feng, J.; Chen, S.; Qi, Z. Coordinated Chassis Control of 4WD Vehicles Utilizing Differential Braking, Traction Distribution and Active Front Steering. IEEE Access 2020, 8, 81055–81068. [Google Scholar] [CrossRef]
- Peng, H.; Hori, Y. Optimum Traction Force Distribution for Stability Improvement of 4WD EV in Critical Driving Condition. In Proceedings of the 9th IEEE International Workshop on Advanced Motion Control, Istanbul, Turkey, 27–29 March 2006; pp. 596–600. [Google Scholar]
- Abe, M.; Mokhiamar, O. An Integration of Vehicle Motion Controls for Full Drive-by-Wire Vehicle. Proc. Ins. Mech. Eng. Part K J. Multi-Body Dyn. 2007, 221, 117–127. [Google Scholar] [CrossRef]
- Mokhiamar, O.; Abe, M. Combined Lateral Force and Yaw Moment Control to Maximize Stability as well as Vehicle Responsiveness During Evasive Maneuvering for Active Vehicle Handling Safety. Veh. Syst. Dyn. 2016, 37, 246–256. [Google Scholar] [CrossRef]
- Ono, E.; Hattori, Y.; Muragishi, Y.; Koibuchi, K. Vehicle Dynamics Integrated Control for Four-Wheel-Distributed Steering and Four-Wheel-Distributed Traction/Braking Systems. Veh. Syst. Dyn. 2007, 44, 139–151. [Google Scholar] [CrossRef]
- Xiong, L.; Yu, Z.; Wang, Y.; Yang, C.; Meng, Y. Vehicle Dynamics Control of Four In-Wheel Motor Drive Electric Vehicle Using Gain Scheduling Based on Tyre Cornering Stiffness Estimation. Veh. Syst. Dyn. 2012, 50, 831–846. [Google Scholar] [CrossRef]
- Yang, P. A Study on Multi-Actuators Control Allocation of Distributed Drive Electric Vehicle for Handling and Stability. Ph.D. Thesis, Tongji University, Shanghai, China, 2015. [Google Scholar]
- Wang, X. Optimal Torque Distribution of Four-Wheel Independent Drive Electric Vehicle Under Steering Condition. Master’s Thesis, Jilin University, Changchun, China, 2017. [Google Scholar]
- Guo, L.; Ge, P.; Sun, D. Torque Distribution Algorithm for Stability Control of Electric Vehicle Driven by Four In-Wheel Motors Under Emergency Conditions. IEEE Access 2019, 7, 104737–104748. [Google Scholar] [CrossRef]
- Li, B.; Goodarzi, A.; Khajepour, A.; Chen, S.-K.; Litkouhi, B. An Optimal Torque Distribution Control Strategy for Four-Independent Wheel Drive Electric Vehicles. Veh. Syst. Dyn. 2015, 53, 1172–1189. [Google Scholar] [CrossRef]
- Huang, J.; Liu, Y.; Liu, M.; Cao, M.; Yan, Q. Multi-Objective Optimization Control of Distributed Electric Drive Vehicles Based on Optimal Torque Distribution. IEEE Access 2019, 7, 16377–16394. [Google Scholar] [CrossRef]
- Hu, X.; Chen, H.; Li, Z.; Wang, P. An Energy-Saving Torque Vectoring Control Strategy for Electric Vehicles Considering Handling Stability Under Extreme Conditions. IEEE Trans. Veh. Technol. 2020, 69, 10787–10796. [Google Scholar] [CrossRef]
- Li, X.; Chan, C.; Wang, Y. A Reliable Fusion Methodology for Simultaneous Estimation of Vehicle Sideslip and Yaw Angles. IEEE Trans. Veh. Technol. 2016, 65, 4440–4458. [Google Scholar] [CrossRef]
- Rezaeian, A.; Zarringhalam, R.; Fallah, S.; Melek, W.; Khajepour, A.; Chen, S.-K.; Moshchuck, N.; Litkouhi, B. Novel Tire Force Estimation Strategy for Real-Time Implementation on Vehicle Applications. IEEE Trans. Veh. Technol. 2015, 64, 2231–2241. [Google Scholar] [CrossRef]
- Ni, J.; Hu, J.; Xiang, C. Envelope Control for Four-Wheel Independently Actuated Autonomous Ground Vehicle Through AFS/DYC Integrated Control. IEEE Trans. Veh. Technol. 2017, 66, 9712–9726. [Google Scholar] [CrossRef]
- Hu, J.; Tao, J.; Xiao, F.; Niu, X.; Fu, C. An Optimal Torque Distribution Control Strategy for Four-Wheel Independent Drive Electric Vehicles Considering Energy Economy. IEEE Access 2019, 7, 141826–141837. [Google Scholar] [CrossRef]
- Wang, Q.; Zhao, Y.; Deng, Y.; Xu, H.; Deng, H.; Lin, F. Optimal Coordinated Control of ARS and DYC for Four-Wheel Steer and In-Wheel Motor Driven Electric Vehicle with Unknown Tire Model. IEEE Trans. Veh. Technol. 2020, 69, 10809–10819. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbols | Definitions | Unit |
|---|---|---|
| CG | Center of gravity | |
| Cf | Cornering stiffness of front wheels | |
| Cr | Cornering stiffness of rear wheels | |
| df | Front track width | |
| dr | Rear track width | |
| Fxi | Longitudinal force of the ith tire | |
| Fyi | Lateral force of the ith tire | |
| Iw | Rotational inertia of the wheel | |
| Iz | Yaw moment of inertia of the vehicle | |
| lf | Distance from CG to front axle | |
| lr | Distance from CG to rear axle | |
| l | Distance from front axle to rear axle | |
| m | Vehicle mass | |
| Reff | Wheel effective radius | |
| Twi | Motor torque on the ith wheel | |
| u | Vehicle longitudinal velocity | |
| v | Vehicle lateral velocity | |
| r | Yaw rate | |
| Sideslip angle | ||
| Steering wheel angle | ||
| Wheel rotational speed |
| Product | Module | Specification |
|---|---|---|
| PXIe-1071 | PXI Chassis | Four-Slot, up to 3 GB/s |
| PXIe-8821 | Controller | 2.6 GHz dual-core processer |
| PXI-8512 | CAN Interface | Flexible data rate, high-speed |
| PXIe-6738 | Analog Output | 16 bit, 32 channel, 1 MS/s |
| Parameters | Values |
|---|---|
| Vehicle mass | 1412 |
| Sprung mass | 1270 |
| Height of center of gravity (CG) | 0.540 |
| Wheel base | 2.910 |
| Distance from CG to front axle | 1.015 |
| Distance from CG to rear axle | 1.895 |
| Track width | 1.675 |
| Vehicle yaw inertia | 1536.7 |
| Wheel inertia | 0.9 |
| Wheel effective radius | 0.325 |
| Signal | Amplitude | Reference |
|---|---|---|
| δ | 6.3° | HiTech SAS (Steering Angle Sensor), HiRain |
| ax, ay | 0.049 m/s2 | Technologies Co., Ltd., Beijing, China |
| r | 1 deg/s | TAMAGAWA AU7428N200, TAMAGAWA |
| 10 rpm | SEIKI Co., Ltd., Nagano Prefecture, Japan |
| Yaw Rate | Vehicle with the Proposed Control Method | Vehicle without Any Control |
|---|---|---|
| Peak value | −0.431 rad/s | −0.736 rad/s |
| 35% of the peak value | −0.151 rad/s | −0.258 rad/s |
| 1 s after completing steering | −0.003 rad/s | −0.505 rad/s |
| 20% of the peak value | −0.086 rad/s | −0.147 rad/s |
| 1.75 s after completing steering | +0.003 rad/s | −0.450 rad/s |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yin, D.; Wang, J.; Du, J.; Chen, G.; Hu, J.-S. A New Torque Distribution Control for Four-Wheel Independent-Drive Electric Vehicles. Actuators 2021, 10, 122. https://doi.org/10.3390/act10060122
Yin D, Wang J, Du J, Chen G, Hu J-S. A New Torque Distribution Control for Four-Wheel Independent-Drive Electric Vehicles. Actuators. 2021; 10(6):122. https://doi.org/10.3390/act10060122
Chicago/Turabian StyleYin, Dejun, Junjie Wang, Jinjian Du, Gang Chen, and Jia-Sheng Hu. 2021. "A New Torque Distribution Control for Four-Wheel Independent-Drive Electric Vehicles" Actuators 10, no. 6: 122. https://doi.org/10.3390/act10060122
APA StyleYin, D., Wang, J., Du, J., Chen, G., & Hu, J.-S. (2021). A New Torque Distribution Control for Four-Wheel Independent-Drive Electric Vehicles. Actuators, 10(6), 122. https://doi.org/10.3390/act10060122