
Five-Fingered Passive Force Feedback Glove Using a Variable Ratio Lever Mechanism †

 ,
, 
Abstract
1. Introduction
2. Variable Stiffness Mechanism
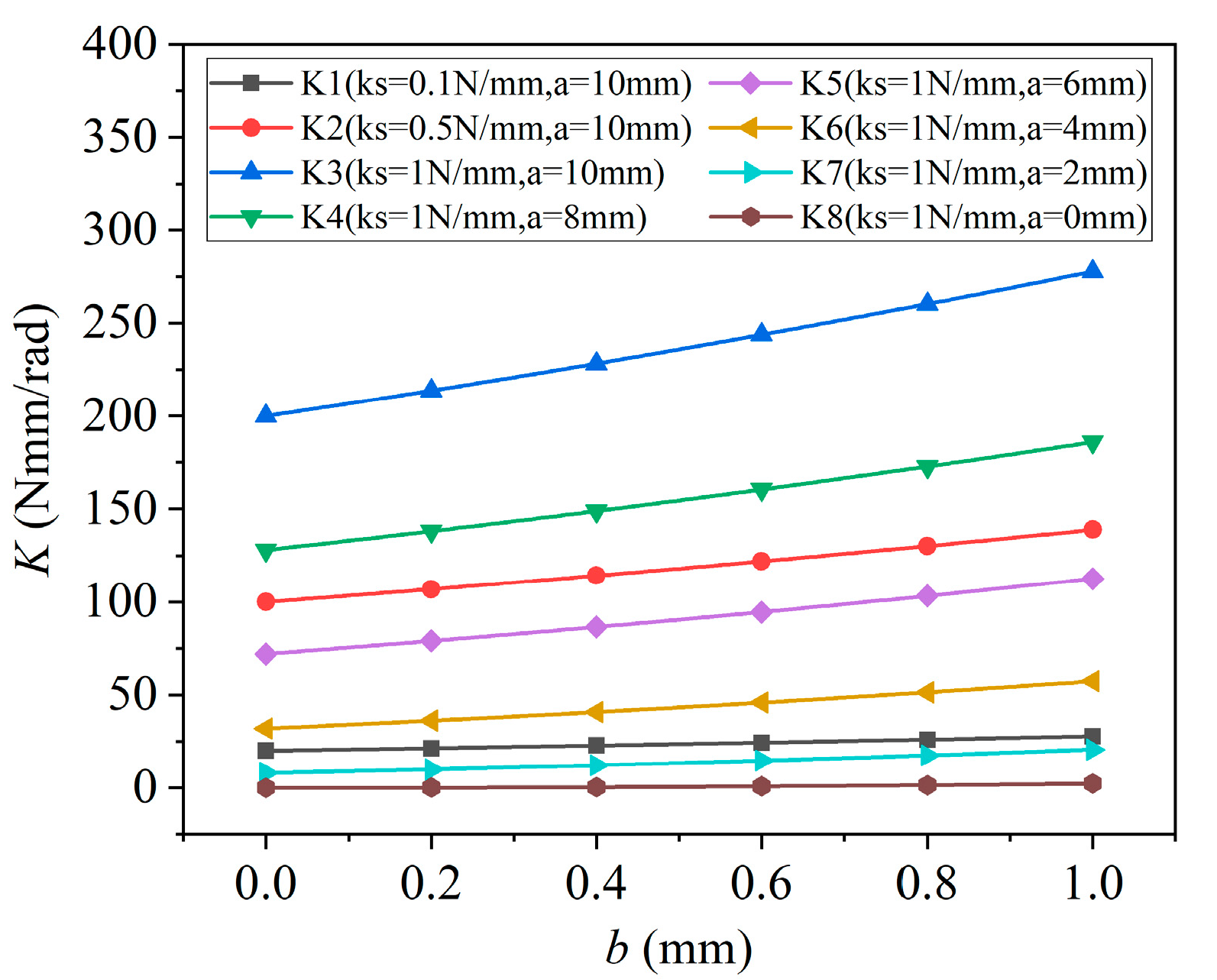
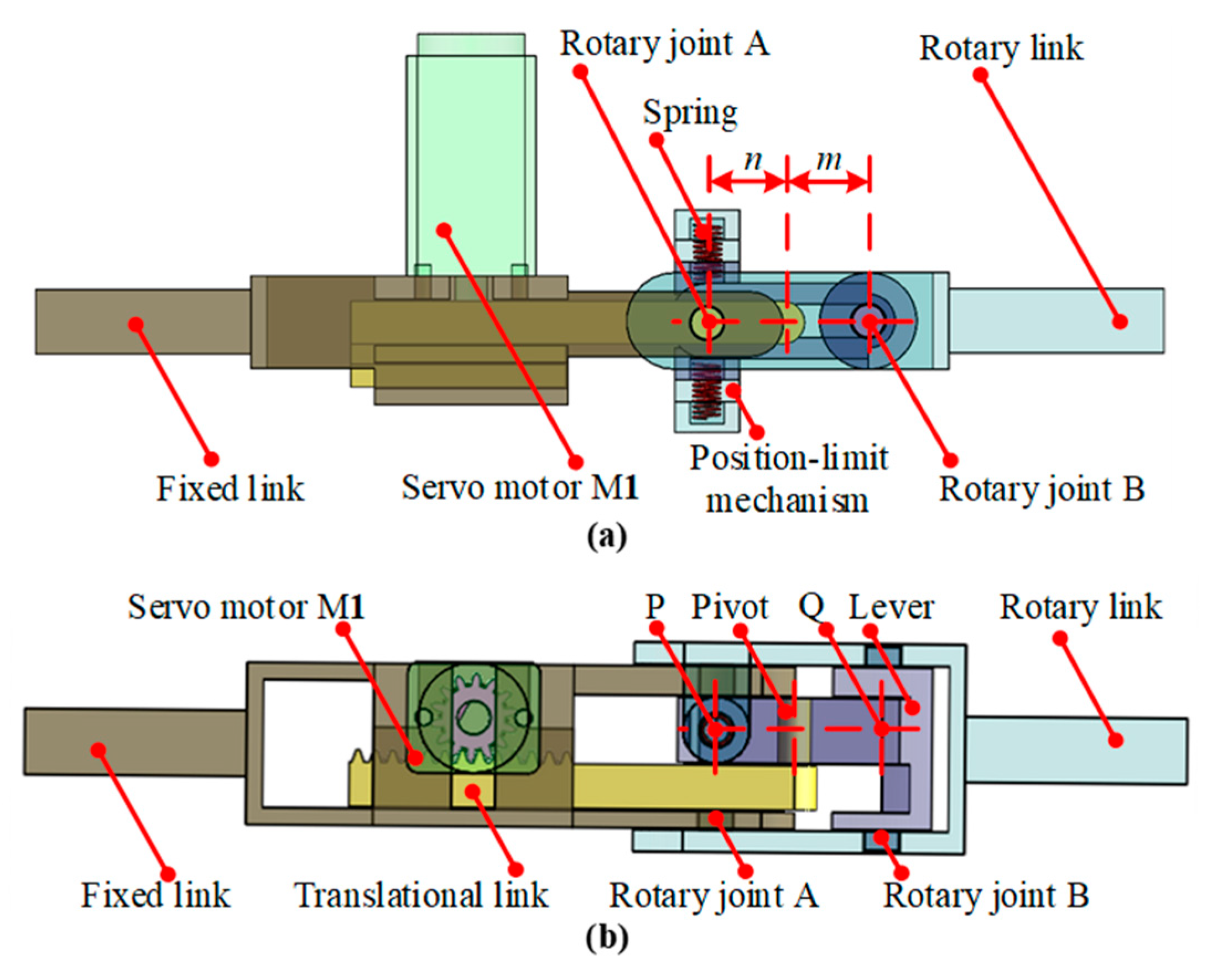
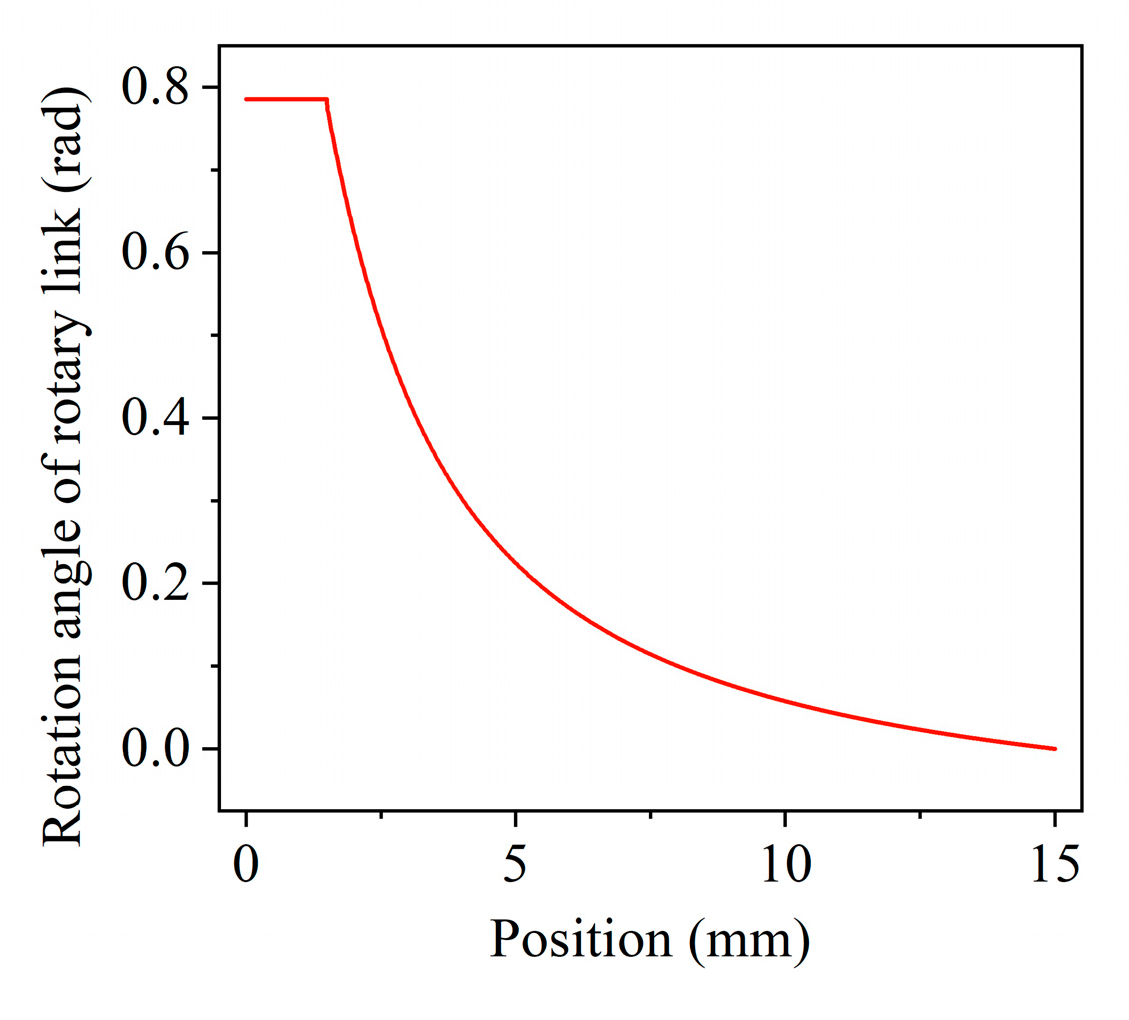
2.1. Principle of Variable Stiffness
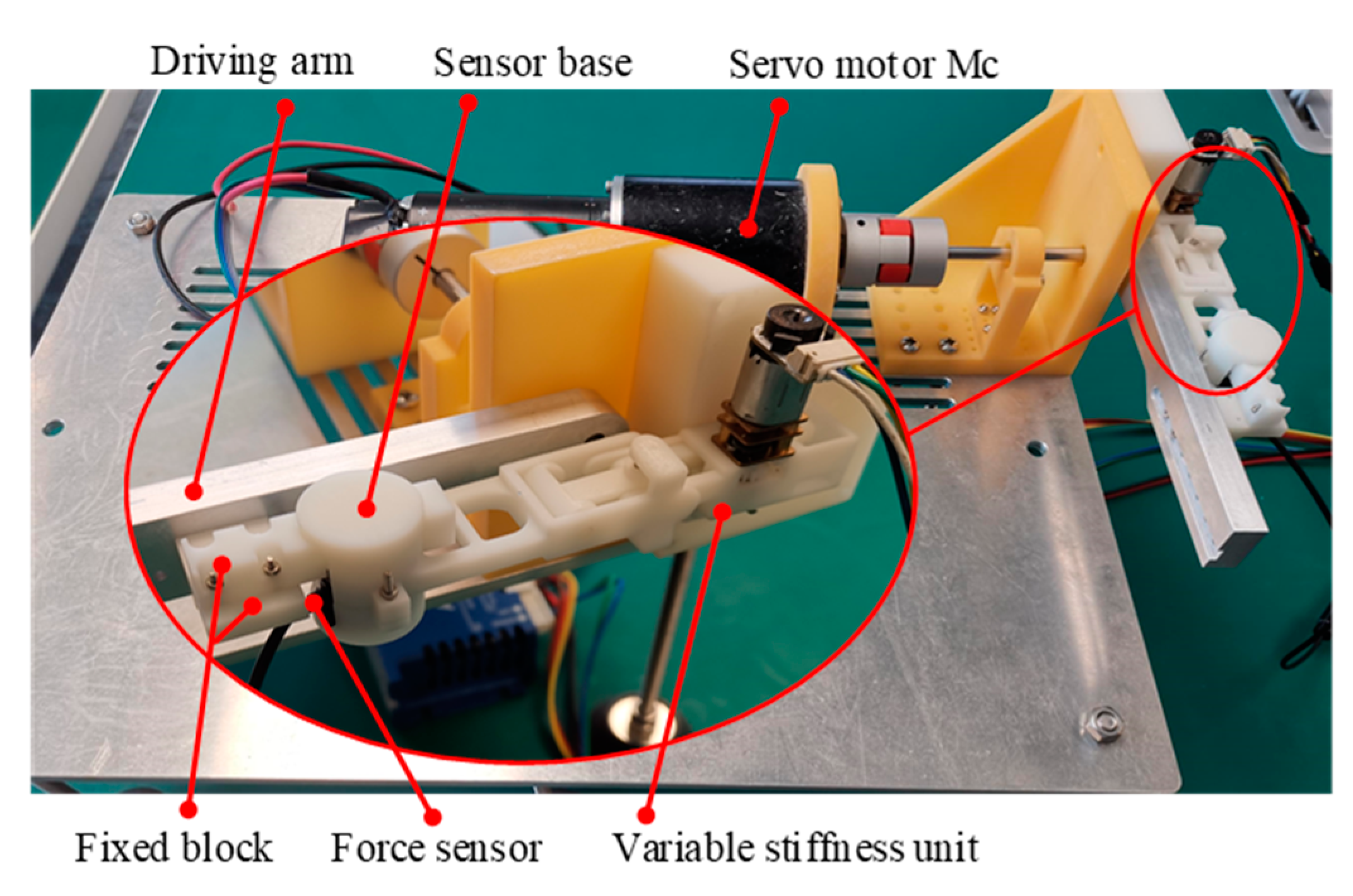
2.2. Design of Variable Stiffness Unit
3. Design of Five-Fingered Force Feedback Glove
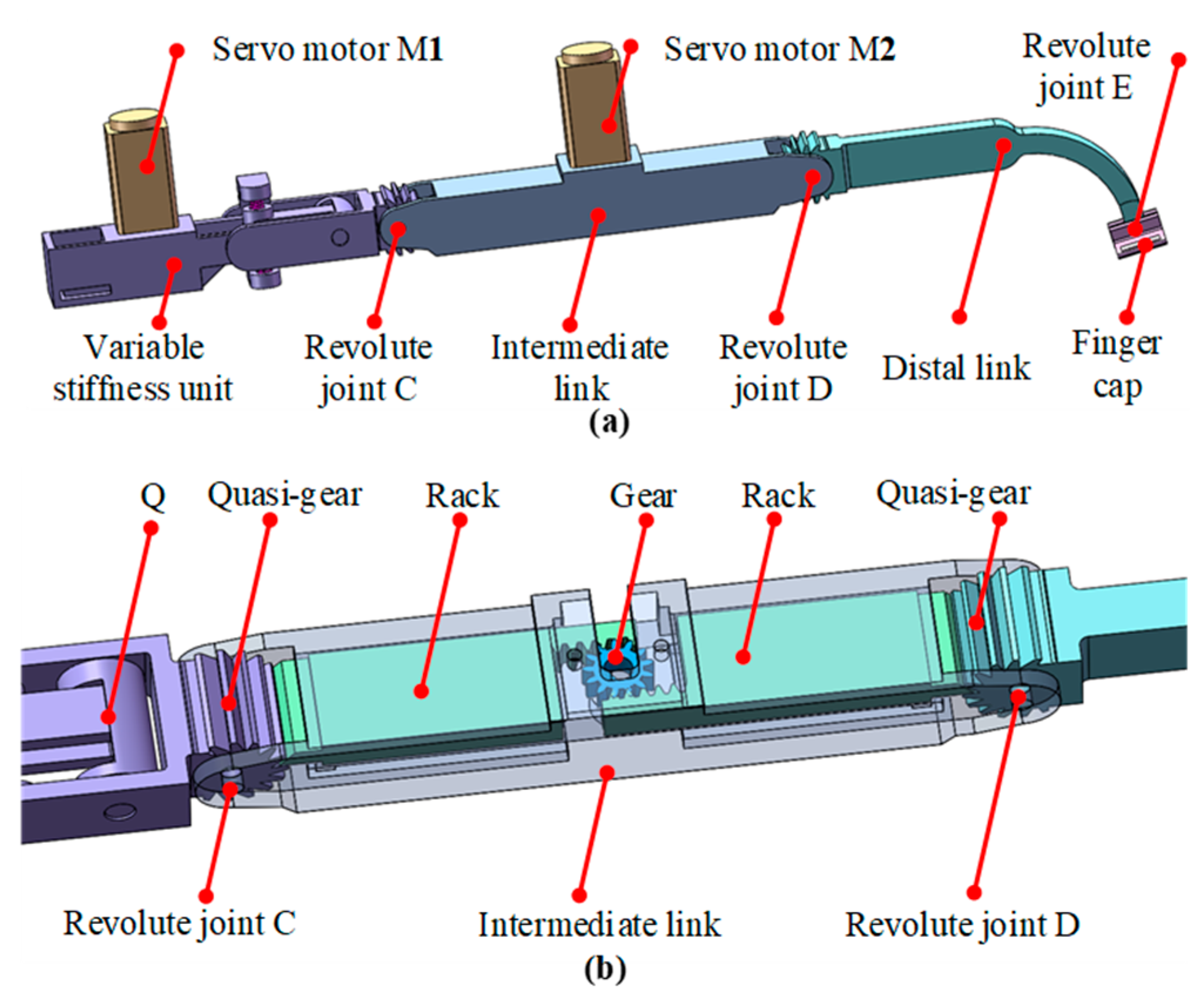
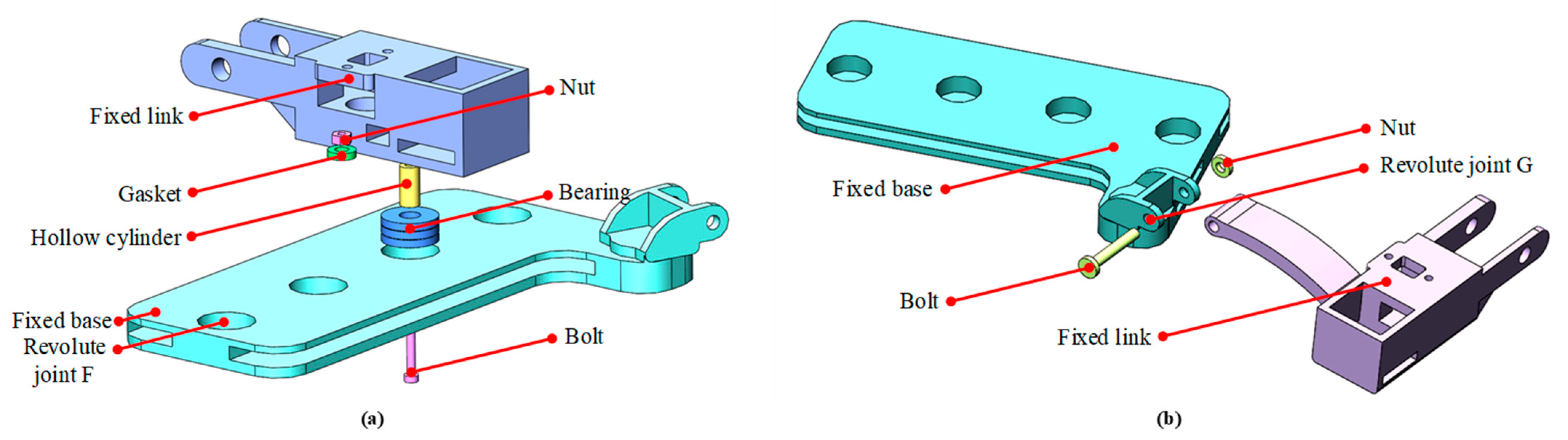
3.1. Mechanical Design of Single Finger
3.2. Iterative Design Analysis
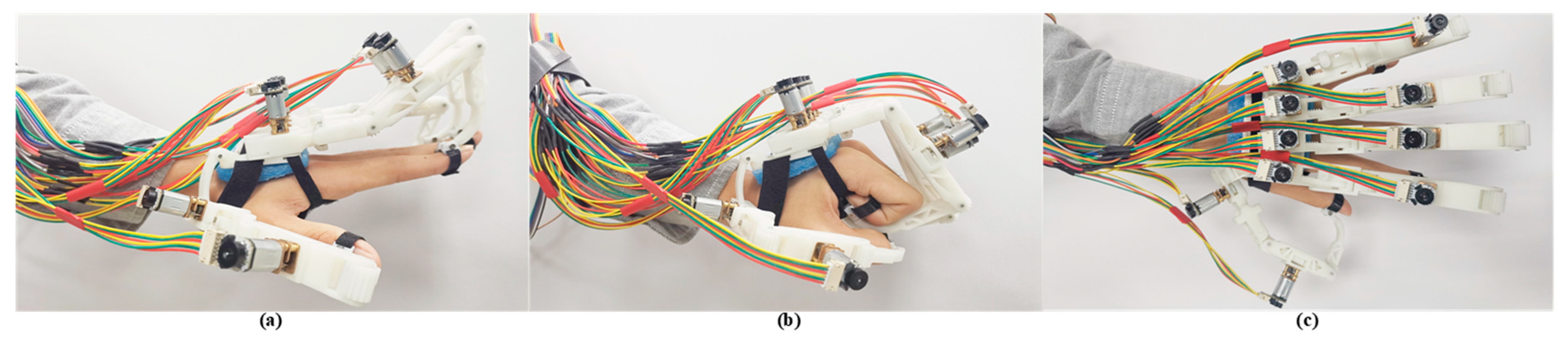
3.3. Physical Prototype of Five-Fingered Force Feedback Glove
4. Control System of Five-Fingered Glove
4.1. Architecture of the Control System
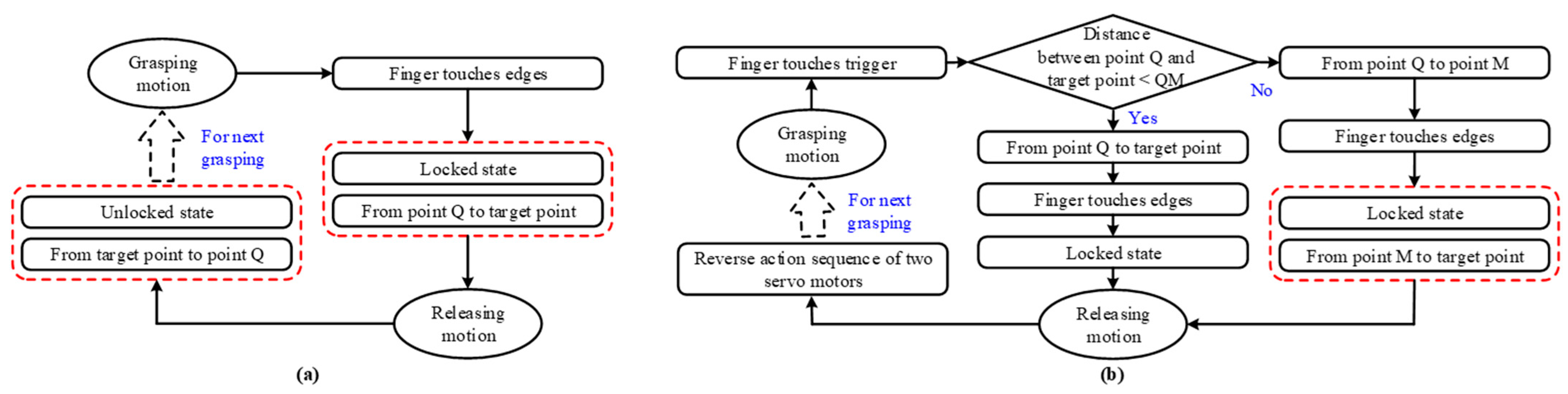
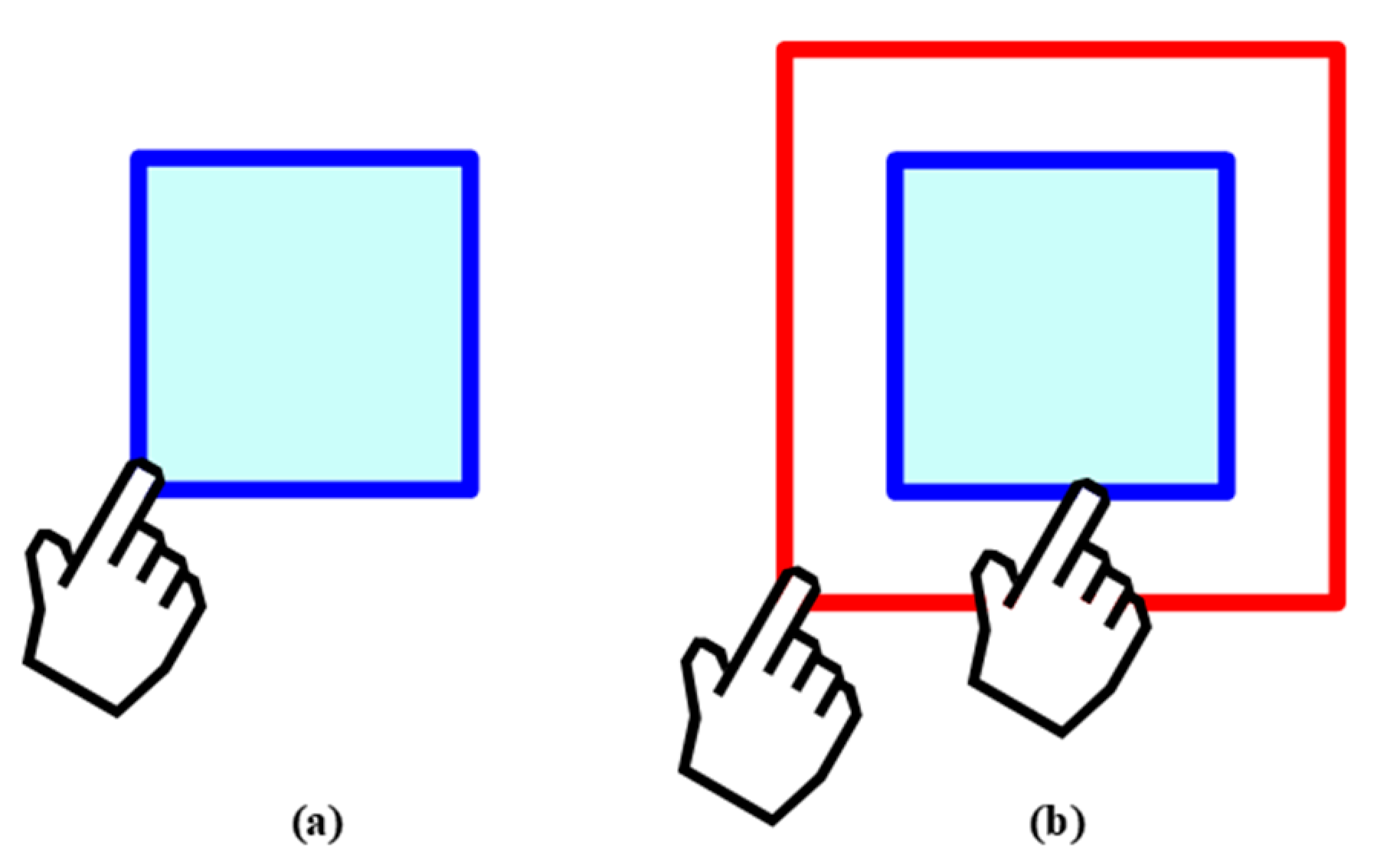
4.2. Predictive Control Mode
5. Performance Evaluation
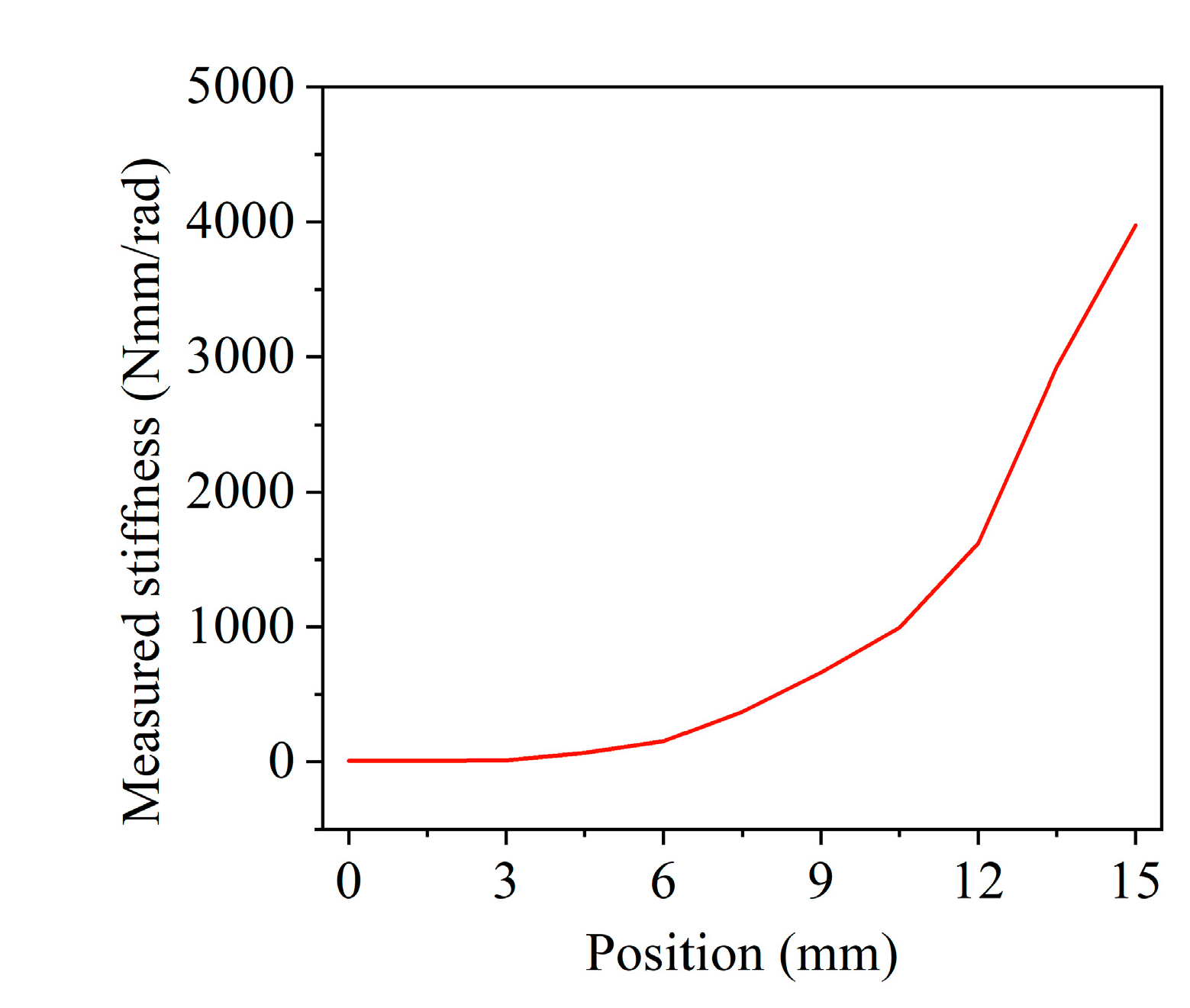
5.1. Performance of Variable Stiffness Unit
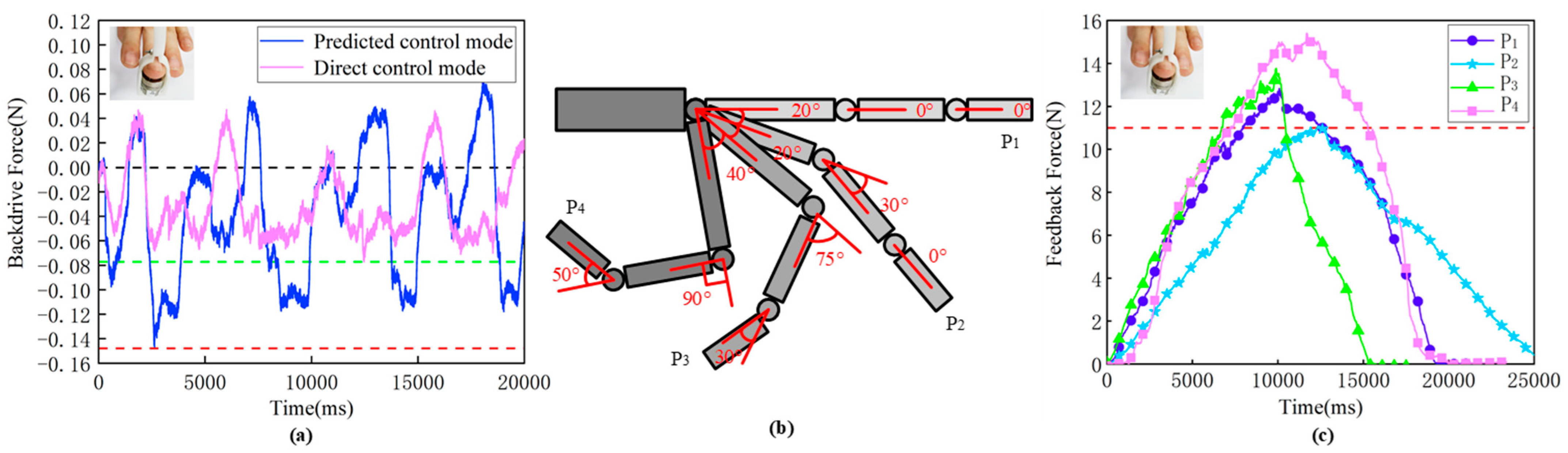
5.2. Performance of Free Space Simulation
5.3. Performance of Constrained Space Simulation
5.4. Performance of Other Indicators
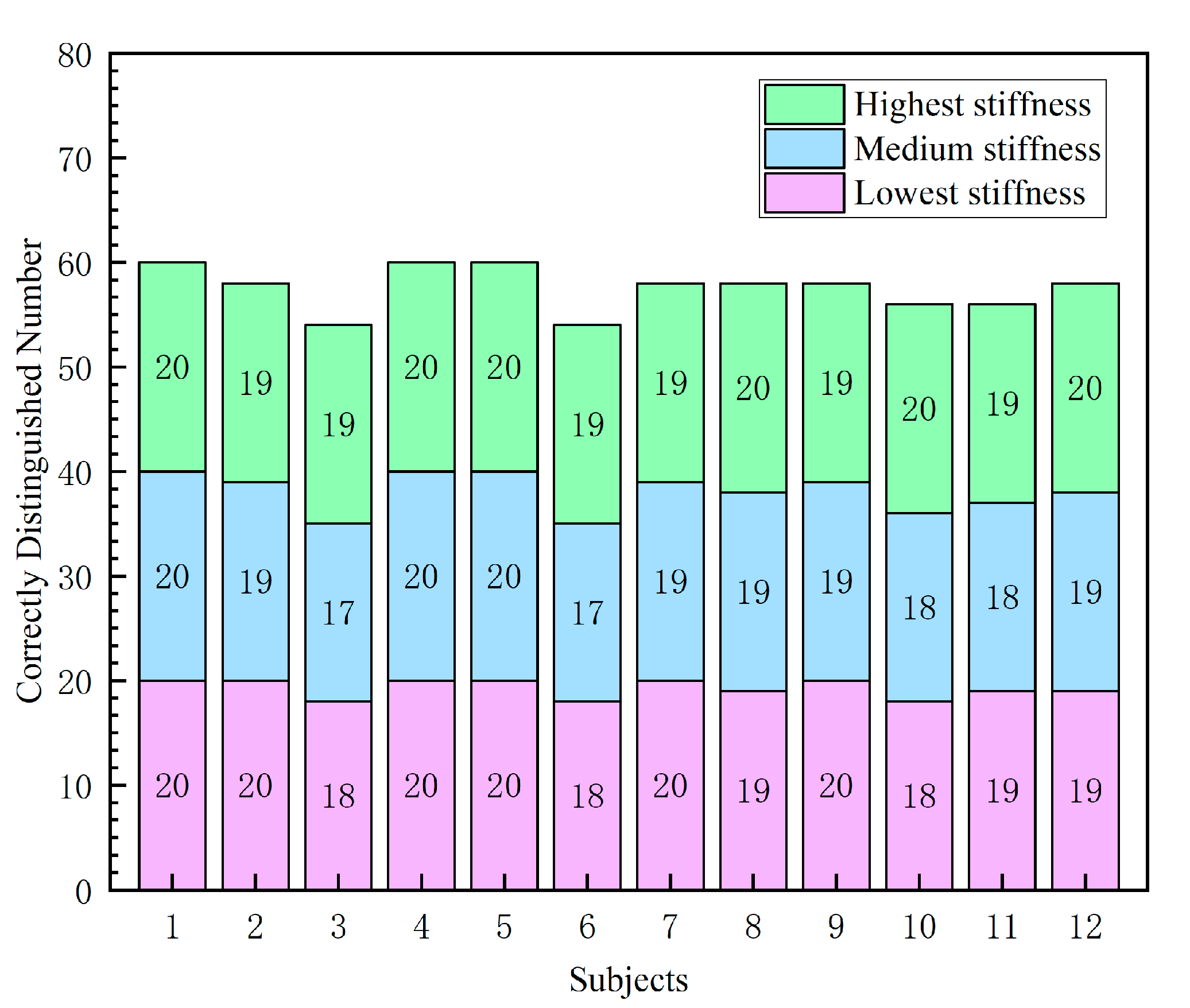
5.5. Exploratory Experiment: Grasping Task
6. Discussion
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Pacchierotti, C.; Sinclair, S.; Solazzi, M.; Frisoli, A.; Hayward, V.; Prattichizzo, D. Wearable haptic systems for the fingertip and the hand: Taxonomy, review, and perspectives. IEEE Trans. Haptics 2017, 10, 580–600. [Google Scholar] [CrossRef] [PubMed]
- Wang, D.; Song, M.; Naqash, A.; Zheng, Y.; Xu, W.; Zhang, Y. Toward whole-hand kinesthetic feedback: A survey of force feedback gloves. IEEE Trans. Haptics 2019, 12, 189–204. [Google Scholar] [CrossRef] [PubMed]
- Zubrycki, I.; Granosik, G. Novel haptic glove-based interface using jamming principle. In Proceedings of the 2015 10th International Workshop on Robot Motion and Control, Poznan, Poland, 6–8 July 2015; pp. 46–51. [Google Scholar]
- Endo, T.; Kawasaki, H.; Mouri, T.; Doi, Y.; Yoshida, T.; Ishigure, Y.; Shimomura, H.; Matsumura, M.; Koketsu, K. Five-fingered haptic interface robot: HIRO III. IEEE Trans. Haptics 2011, 4, 14–27. [Google Scholar] [CrossRef] [PubMed]
- Blake, J.; Gurocak, H.B. Haptic glove with MR brakes for virtual reality. IEEE/ASME Trans. Mechatron. 2009, 14, 606–615. [Google Scholar] [CrossRef]
- Kuroda, Y.; Shigeta, Y.; Imura, M.; Uranishi, Y.; Oshiro, O. Haptic glove using compression-induced friction torque. In Proceedings of the ASME 2013 Dynamic Systems and Control Conference, Palo Alto, CA, USA, 21–23 October 2013; p. V002T26A004. [Google Scholar]
- CyberGlove Systems. Cybergrasp. 2013. Available online: http://www.cyberglovesystems.com/ (accessed on 26 March 2021).
- Zhou, M.A.; Ben-Tzvi, P. RML glove—An exoskeleton glove mechanism with haptics feedback. IEEE/ASME Trans. Mechatron. 2015, 20, 641–652. [Google Scholar]
- Jo, I.; Bae, J. Design and control of a wearable hand exoskeleton with force-controllable and compact actuator modules. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation, Seattle, WA, USA, 26–30 May 2015; pp. 5596–5601. [Google Scholar]
- Fontana, M.; Dettori, A.; Salsedo, F.; Bergamasco, M. Mechanical design of a novel hand exoskeleton for accurate force displaying. In Proceedings of the 2009 IEEE International Conference on Robotics and Automation, Kobe, Japan, 12–17 May 2009; pp. 1704–1709. [Google Scholar]
- Choi, I.; Hawkes, E.W.; Christensen, D.L.; Ploch, C.J.; Follmer, S. Wolverine: A wearable haptic interface for grasping in virtual reality. In Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems, Daejeon, Korea, 9–14 October 2016; pp. 986–993. [Google Scholar]
- Gu, X.; Zhang, Y.; Sun, W.; Bian, Y.; Zhou, D.; Kristensson, P.O. Dexmo: An inexpensive and lightweight mechanical exoskeleton for motion capture and force feedback in VR. In Proceedings of the 2016 CHI Conference on Human Factors in Computing Systems, San Jose, CA, USA, 7–12 May 2016; pp. 1991–1995. [Google Scholar]
- Guo, Y.; Wang, D.; Wang, Z.; Yang, X.; Wang, H.; Zhang, Y.; Xu, W. Achieving high stiffness range of force feedback gloves using variable stiffness mechanism. In Proceedings of the 2019 IEEE World Haptics Conference, Tokyo, Japan, 9–12 July 2019; pp. 205–210. [Google Scholar]
- Vogels, I.M.L.C. Detection of temporal delays in visual-haptic interfaces. Hum. Factors 2004, 46, 118–134. [Google Scholar] [CrossRef] [PubMed]
- Doxon, A.J.; Johnson, D.E.; Tan, H.Z.; Provancher, W.R. Human detection and discrimination of tactile repeatability, mechanical backlash, and temporal delay in a combined tactile-kinesthetic haptic display system. IEEE Trans. Haptics 2013, 6, 453–463. [Google Scholar] [CrossRef] [PubMed]
- Wang, Y.; Fang, L. Principle and design of mechanically musculoskeletal variable-stiffness mechanism. Robot 2015, 37, 506–512. [Google Scholar]
- Van Ham, R.; Vanderborght, B.; Van Damme, M.; Verrelst, B.; Lefeber, D. MACCEPA, the mechanically adjustable compliance and controllable equilibrium position actuator: Design and implementation in a biped robot. Robot. Auton. Syst. 2007, 55, 761–768. [Google Scholar] [CrossRef]
- Huang, T.; Huang, H.; Kuan, J. Mechanism and control of continuous-state coupled elastic actuation. J. Intell. Robot. Syst. 2014, 74, 571–587. [Google Scholar] [CrossRef]
- Groothuis, S.S.; Rusticelli, G.; Zucchelli, A.; Stramigioli, S.; Carloni, R. The variable stiffness actuator vsaut-ii: Mechanical design, modeling, and identification. IEEE/ASME Trans. Mechatron. 2014, 19, 589–597. [Google Scholar] [CrossRef]
- Tsagarakis, N.G.; Sardellitti, I.; Caldwell, D.G. A new variable stiffness actuator (CompAct-VSA): Design and modelling. In Proceedings of the 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems, San Francisco, CA, USA, 25–30 September 2011; pp. 378–383. [Google Scholar]
- Vanderborght, B.; Tsagarakis, N.G.; Van Ham, R.; Thorson, I.; Caldwell, D.G. MACCEPA 2.0: Compliant actuator used for energy efficient hopping robot Chobino1D. Auton. Robot. 2011, 31, 55–65. [Google Scholar] [CrossRef]
- Masahiko, O.; Nobuyuki, I.; Yuto, N.; Masayuki, I. Stiffness readout in musculo-skeletal humanoid robot by using rotary potentiometer. In Proceedings of the SENSORS, 2010 IEEE, Waikoloa, HI, USA, 1–4 November 2010; pp. 2329–2333. [Google Scholar]
- Jafari, A.; Tsagarakis, N.G.; Caldwell, D.G. AwAS-II: A new actuator with adjustable stiffness based on the novel principle of adaptable pivot point and variable lever ratio. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 4638–4643. [Google Scholar]
- Salisbury, K.; Brock, D.; Massie, T.; Swarup, N.; Zilles, C. Haptic rendering: Programming touch interaction with virtual objects. In Proceedings of the 1995 Symposium on Interactive 3D Graphics, Monterey, CA, USA, 9–12 April 1995; pp. 123–130. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Position (mm) | 0.0 | 1.5 | 3.0 | 4.5 | 6.0 | 7.5 | 9.0 | 10.5 | 12.0 | 13.5 | 15.0 |
|---|---|---|---|---|---|---|---|---|---|---|---|
| Theoretical stiffness (Nmm/rad) | 0.00 | 5.56 | 28.13 | 82.66 | 200.00 | 450.00 | 1012.50 | 2450.00 | 7200.00 | 36,450.00 | Infinity |
| Measured stiffness (Nmm/rad) | 7.28 | 8.80 | 11.87 | 68.16 | 153.70 | 372.42 | 662.08 | 993.13 | 1324.17 | 2924.21 | 3972.15 |
| Linear stiffness (N/m) | 0.89 | 1.09 | 1.50 | 9.62 | 22.45 | 55.41 | 100.02 | 151.89 | 205.20 | 455.55 | 619.89 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guo, Y.; Yang, X.; Wang, H.; Zhang, Y.; Xu, W.; Wang, D. Five-Fingered Passive Force Feedback Glove Using a Variable Ratio Lever Mechanism. Actuators 2021, 10, 96. https://doi.org/10.3390/act10050096
Guo Y, Yang X, Wang H, Zhang Y, Xu W, Wang D. Five-Fingered Passive Force Feedback Glove Using a Variable Ratio Lever Mechanism. Actuators. 2021; 10(5):96. https://doi.org/10.3390/act10050096
Chicago/Turabian StyleGuo, Yuan, Xiuping Yang, Haitong Wang, Yuru Zhang, Weiliang Xu, and Dangxiao Wang. 2021. "Five-Fingered Passive Force Feedback Glove Using a Variable Ratio Lever Mechanism" Actuators 10, no. 5: 96. https://doi.org/10.3390/act10050096
APA StyleGuo, Y., Yang, X., Wang, H., Zhang, Y., Xu, W., & Wang, D. (2021). Five-Fingered Passive Force Feedback Glove Using a Variable Ratio Lever Mechanism. Actuators, 10(5), 96. https://doi.org/10.3390/act10050096