
Trajectory Optimization Algorithm for a 4-DOF Redundant Parallel Robot Based on 12-Phase Sine Jerk Motion Profile


Abstract
1. Introduction
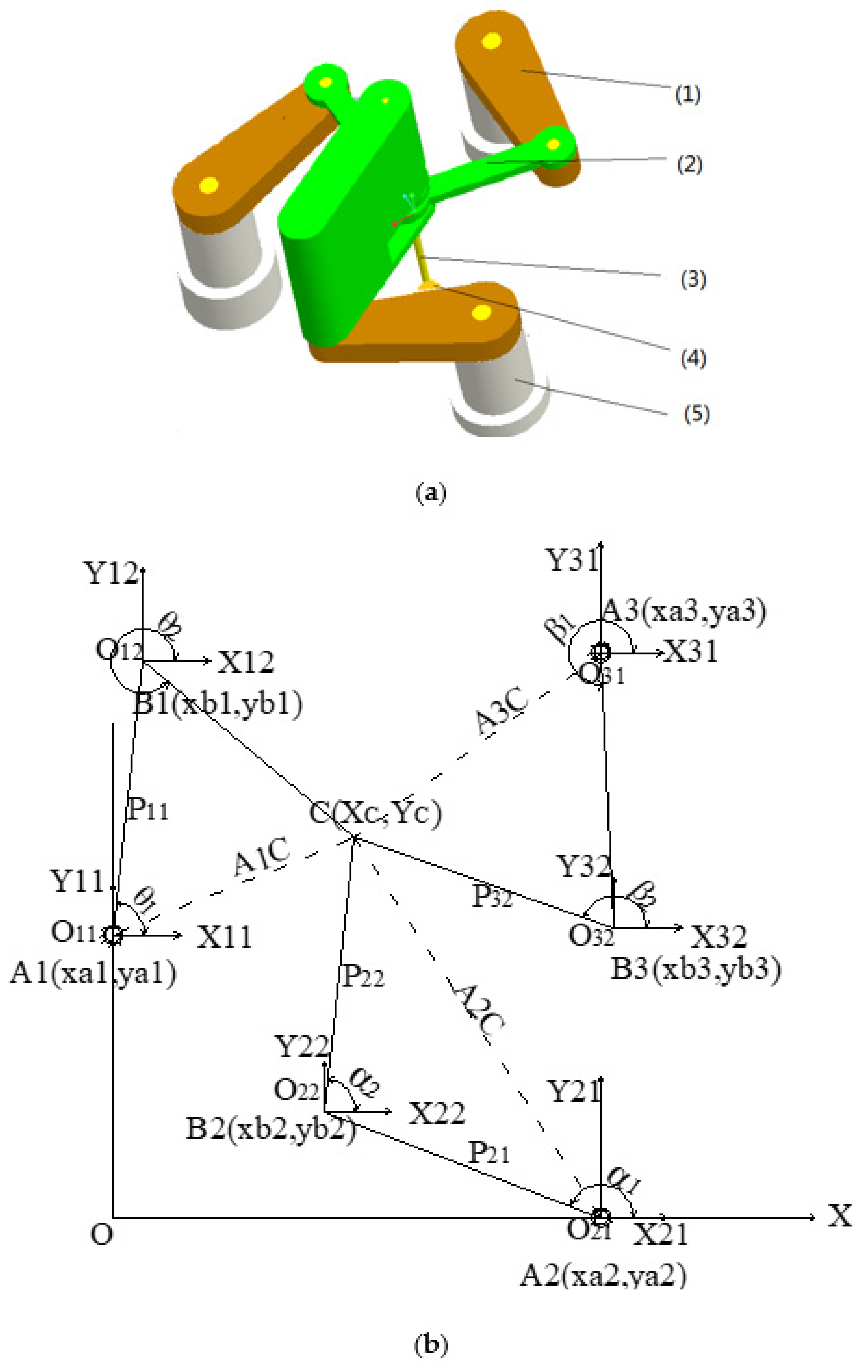
2. Establishment of Kinematics Equation of 4-DOF Redundant Parallel Robot
3. Construction Principle of 12-Phase Sine Jerk Motion Profile
4. Total Mechanical Energy Consumption Model
4.1. Establishment of Total Mechanical Energy Consumption Model
4.2. Time–Energy Optimal Solution
5. Simulation and Experiment Results Analysis
5.1. Simulation Analysis of Stability and Accuracy of 12-Phase Sine Jerk Motion Profile
5.2. Comparative Analysis of Characteristic Parameters of 12-Phase, 3-Phase, and 15-Phase Sine Jerk Motion Profile
5.2.1. Comparison of Operational Stability
5.2.2. Comparison of the Amount of Jerk on Each Joint
5.2.3. Speed Comparison
5.2.4. Comparison of Energy Consumption
6. Conclusions
- (1)
- When the joint space of the robot runs the 12-phase sine jerk motion profile, the overall operation is accurate and stable, and no sudden change of force and velocity exists in each joint, so the oscillation phenomenon is avoided.
- (2)
- Compared with the three-phase sine jerk curve, when the robot operates the 12-phase sine jerk motion profile, the force of each joint is more uniform, and the movement amount is closer to the maximum allowable limit value, so the operation efficiency is higher.
- (3)
- The energy consumption of the 12-phase sine jerk motion profile is higher than that of the three-phase sine jerk motion profile, but the former is far better than the latter in the stress uniformity and operation efficiency of each joint, which makes up for the defect of high energy consumption. As a result, the 12-phase sine jerk motion profile is still better than the three-phase sine jerk motion profile on the whole.
- (4)
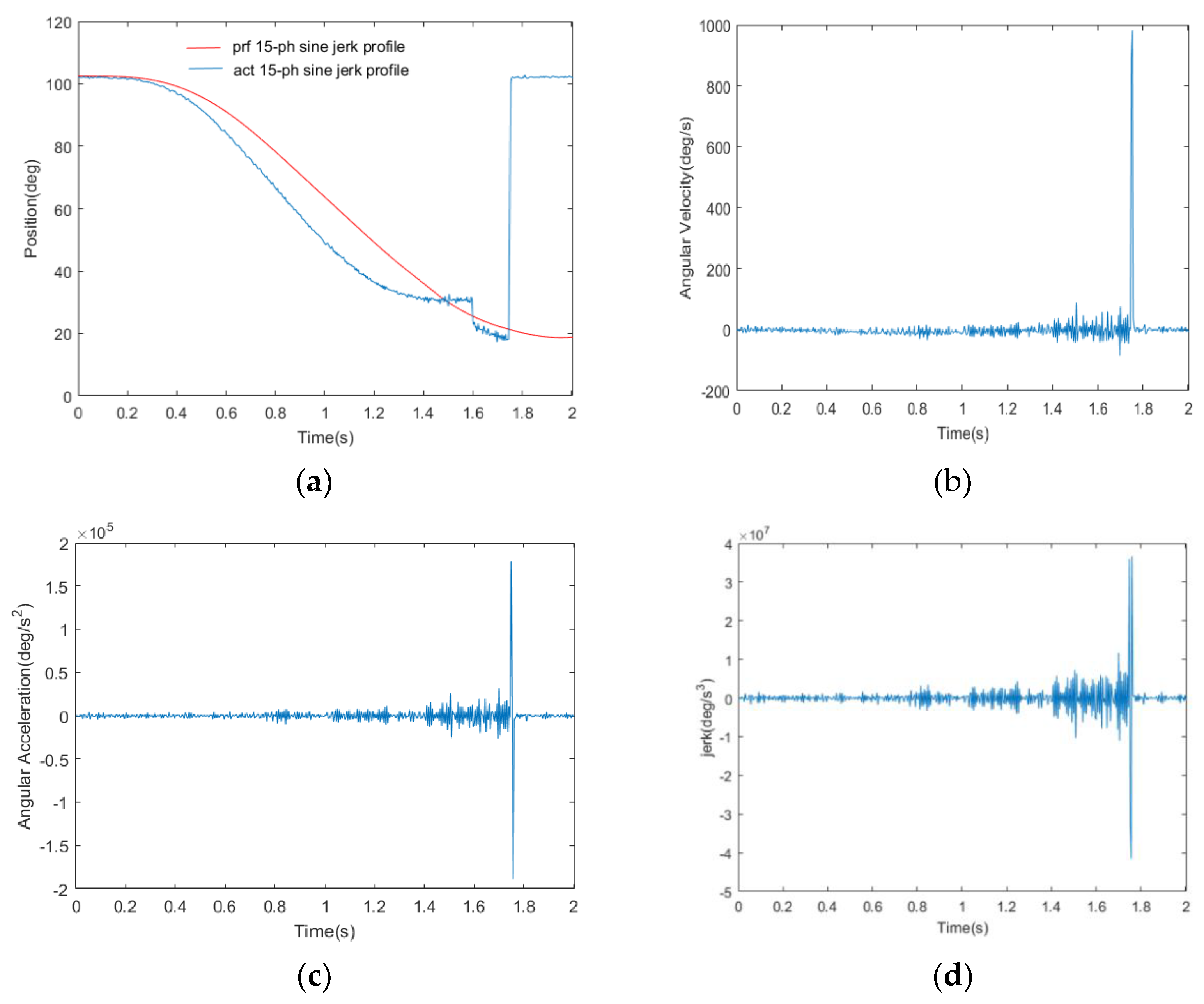
- The 15-phase sine jerk motion profile is not suitable for trajectory planning in a small working space.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
References
- Pu, Y.S.; Shi, Y.Y.; Lin, X.J.; Guo, J. Attitude interpolation of industrial robot Hermite spline based on Logarithmic Quaternion. J. Northwestern Polytech. Univ. 2019, 37, 1165–1173. [Google Scholar] [CrossRef]
- Abu-Dakka, F.J.; Assad, I.F.; Alkhdour, R.M. Statistical evaluation of an evolutionary algorithm for minimum time trajectory planning problem for industrial robots. Int. J. Adv. Manuf. Technol. 2017, 89, 389–406. [Google Scholar] [CrossRef]
- Peng, J.W.; Liu, Y.; Zhao, Z.; Lou, Y.J. Joint trajectory planning for industrial robots with continuous acceleration. System Simulation Committee of CAS, Simulation Technology Application Committee of CAS, University of Science and Technology of China. In Proceedings of the 20th Chinese annual Conference on System Simulation Technology and its Applications (20th CCSSTA 2019), Nanchang, China, 3–6 August 2019; pp. 442–449. [Google Scholar]
- Huang, Z. Study on mechanisms basic theory of parallel robot. Robot Tech. Appl. 2010, 11–14. [Google Scholar] [CrossRef]
- Aquino, G.; Rubio, J.D.J.; Pacheco, J.; Gutierrez, G.J.; Ochoa, G.; Balcazar, R.; Cruz, D.R.; Garcia, E.; Novoa, J.F.; Zacarias, A. Novel Nonlinear Hypothesis for the Delta Parallel Robot Modeling. IEEE Access 2020, 8, 46324–46334. [Google Scholar] [CrossRef]
- Rubio, D.J.J. SOFMLS: Online Self-Organizing Fuzzy Modified Least-Squares Network. IEEE Trans. Fuzzy Syst. 2009, 17, 1296–1309. [Google Scholar] [CrossRef]
- Lu, Z. Principle and Application of Redundant Dof Robot; China Machine Press: Beijing, China, 2007. [Google Scholar]
- Kim, J.; Croft, E.A. Online near time-optimal trajectory planning for industrial robots. Robot. Comput. Integr. Manuf. 2019, 58, 158–171. [Google Scholar] [CrossRef]
- Li, H.Z.; Gong, Z.M.; Lin, W.; Lippa, T. Motion profile planning for reduced jerk and vibration residuals. Simtech Tech. Rep. 2007, 8, 32–37. [Google Scholar]
- Fang, Y.; Qi, J.; Hu, J.; Wang, W.; Peng, Y. An approach for jerk-continuous trajectory generation of robotic manipulators with kinematical constraints. Mech. Mach. Theory 2020, 153, 103957. [Google Scholar] [CrossRef]
- Valente, A.; Baraldo, S.E. Carpanzano Smooth trajectory generation for industrial robots performing high precision assembly processes Cirp Ann. Manuf. Technol. 2017, 66, 17–20. [Google Scholar] [CrossRef]
- Wang, Y.; Yang, D.; Gai, R.; Wang, S. Sun Design of trigonometric velocity scheduling algorithm based on pre-interpolation and look-ahead interpolation. Int. J. Mach. Tools Manuf. 2015, 96, 94–105. [Google Scholar] [CrossRef]
- Ruiz, G.A.; Fontes, J.V.C.; da Silva, M.M. The Influence of Kinematic Redundancies in the Energy Efficiency of Planar Parallel Manipulators. In Proceedings of the ASME 2015 International Mechanical Engineering Congress and Exposition, Houston, TX, USA, 13–19 November 2015; Volume 4A. [Google Scholar]
- Paes, K.; Dewulf, W.; Elst, K.V.; Kellens, K.; Slaets, P. Energy Efficient Trajectories for an Industrial ABB Robot. Procedia Cirp 2014, 15, 105–110. [Google Scholar] [CrossRef]
- Ho, P.M.; Uchiyama, N.; Sano, S.; Honda, Y.; Kato, A.; Yonezawa, T. Simple motion trajectory generation for energy saving of industrial machines. J. Control Meas. Syst. Integr. 2014, 7, 29–34. [Google Scholar] [CrossRef]
- Carabin, G.; Scalera, L. On the Trajectory Planning for Energy Efficiency in Industrial Robotic Systems. Robotics 2020, 9, 89. [Google Scholar] [CrossRef]
- Gadaleta, M.; Pellicciari, M.; Berselli, G. Optimization of the energy consumption of industrial robots for automatic code generation. Robot. Comput. Integr. Manuf. 2019, 57, 452–464. [Google Scholar] [CrossRef]
- Xu, H.L.; Xie, X.R.; Zhuang, J.; An, S.W. Optimal time and energy trajectory planning for industrial robots. Chin. J. Mech. Eng. 2010, 46, 19–25. [Google Scholar] [CrossRef]
- Gasparetto, A.; Zanotto, V. Optimal trajectory planning for industrial robots. Adv. Eng. Softw. 2010, 41, 548–556. [Google Scholar] [CrossRef]
- Kazem, B.I.; Mahdi, A.I.; Oudah, A.T. Motion planning for a robot arm by using genetic algorithm. Jordan J. Mech. Ind. Eng. 2008, 2, 131–136. [Google Scholar]
- Perumaal, S.; Jawahar, N. Synchronized trigonometric S-curve trajectory for jerk-bounded time-optimal pick and place operation. Int. J. Robot. Autom. 2012, 27, 385–395. [Google Scholar]
- Zhang, S.; Cao, Y.; Sun, H. Application of Jacobian Matrix and determinant in robot motion. J. Beijing Inst. Technol. 2020, 40, 576–580. [Google Scholar]
- Field, G.; Stepanenko, Y. Iterative dynamic programming: An approach to minimum energy trajectory planning for robotic manipulators. In Proceedings of the IEEE International Conference on Robotics and Automation, Minneapolis, MN, USA, 22–28 April 1996. [Google Scholar]
- Bailon, W.P.; Cardiel, E.B.; Campos, I.J.; Paz, A.R. Mechanical energy optimization in trajectory planning for six DOF robot manipulators based on eighth-degree polynomial functions and a genetic algorithm. In Proceedings of the 2010 7th International Conference on Electrical Engineering Computing Science and Automatic Control, Chiapas, Mexico, 8–10 September 2010; pp. 446–451. [Google Scholar] [CrossRef]
- Yang, Y.; Pan, S.F. Dynamics Analysis of 3-DOF Industrial Robots. Manuf. Autom. 2008, 40, 51–53. [Google Scholar]
- Kyriakopoulos, K.J.; Saridis, G.N. Minimum jerk path generation. In Proceedings of the 1988 IEEE International Conference on Robotics and Automation, Philadelphia, PA, USA, 24–29 April 1988; pp. 364–369. [Google Scholar]
- Martin, B.J.; Bobrow, J.E. Minimum-effort motions for open chain manipulators with task-dependent end-effector constraints. Int. J. Robot. Res. 1999, 18, 213–224. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Time Interval | of Phase 12-Phase Sine Jerk Motion Profile |
|---|---|
| , | |
| Parameter | Quality | Length | Distance from Center of Mass to Joint | Moment of Inertia |
|---|---|---|---|---|
| 1 | 2.1 | 0.2440 | 0.1096 | 0.0252 |
| 2 | 8.5 | 0.2440 | 0.0957 | 0.0778 |
| 3 | 2.1 | 0.2440 | 0.1096 | 0.0252 |
| 4 | 0.4 | 0.2440 | 0.1260 | 0.0064 |
| 5 | 2.1 | 0.2440 | 0.1096 | 0.0252 |
| 6 | 0.4 | 0.2440 | 0.1260 | 0.0064 |
| Joint Number Kinematic Parameter | Joint 1 | Joint 3 | Joint 5 |
|---|---|---|---|
| Starting point | 60 | 177 | −77 |
| Starting point | 46 | 167 | −54 |
| Angular velocity limit value | 25.913 | 17.074 | 42.574 |
| Angular acceleration limit value | 86.369 | 61.667 | 141.903 |
| Jerk limit value | 380.195 | 271.426 | 624.660 |
| Joint Number | Joint 1 | Joint 3 | Joint 5 |
|---|---|---|---|
| Kinematic parameter | |||
| Starting point | 60 | 177 | −77 |
| Stopping point | 46 | 167 | −54 |
| Ultimate angular velocity | 23.600 | 16.850 | 51.204 |
| Ultimate angular acceleration | 78.660 | 56.163 | 129.238 |
| Ultimate jerk | 346.261 | 247.200 | 568.907 |
| Jerk Capacity of Each Joint | 3-Phase Sine Jerk Motion Profile | 12-Phase Sine Jerk Motion Profile |
|---|---|---|
| Joint 1 | 14,229 | 29.2180 |
| Joint 3 | 72.539 | 14.8953 |
| Joint 5 | 38,409.778 | 78.8711 |
| Angular Velocity of Each Joint (deg/s) | 3-Phase Sine Jerk Motion Profile | 12-Phase Sine Jerk Motion Profile |
|---|---|---|
| Joint 1 | −17.409 | −25.0653 |
| Joint 3 | −12.487 | −18.3629 |
| Joint 5 | 28.760 | 42.2544 |
| Energy Consumption of Each Joint | 3-Phase Sine Jerk Motion Profile | 12-Phase Sine Jerk Motion Profile |
|---|---|---|
| Joint 1 | 19.6823 | 29.5219 |
| Joint 3 | 14.0532 | 21.0786 |
| Joint 5 | 32.3380 | 48.5045 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hu, S.; Kang, H.; Tang, H.; Cui, Z.; Liu, Z.; Ouyang, P. Trajectory Optimization Algorithm for a 4-DOF Redundant Parallel Robot Based on 12-Phase Sine Jerk Motion Profile. Actuators 2021, 10, 80. https://doi.org/10.3390/act10040080
Hu S, Kang H, Tang H, Cui Z, Liu Z, Ouyang P. Trajectory Optimization Algorithm for a 4-DOF Redundant Parallel Robot Based on 12-Phase Sine Jerk Motion Profile. Actuators. 2021; 10(4):80. https://doi.org/10.3390/act10040080
Chicago/Turabian StyleHu, Shengqiao, Huimin Kang, Hao Tang, Zhengjie Cui, Zhicheng Liu, and Puren Ouyang. 2021. "Trajectory Optimization Algorithm for a 4-DOF Redundant Parallel Robot Based on 12-Phase Sine Jerk Motion Profile" Actuators 10, no. 4: 80. https://doi.org/10.3390/act10040080
APA StyleHu, S., Kang, H., Tang, H., Cui, Z., Liu, Z., & Ouyang, P. (2021). Trajectory Optimization Algorithm for a 4-DOF Redundant Parallel Robot Based on 12-Phase Sine Jerk Motion Profile. Actuators, 10(4), 80. https://doi.org/10.3390/act10040080