1. Introduction
Pneumatic Artificial Muscles (PAMs) are a form of soft actuator that is applied to an expanding number of applications for their unique characteristics such as their low weight and simple construction, inherent compliance, and high specific force and specific work capabilities. In a design environment where optimization techniques are increasingly used for mechanism development and packaging, it is becoming more important than ever to have accurate model representations of device components, including actuators, to accomplish effective design outcomes. Actuator design requirements typically include force and stroke values, while common actuator design constraints include actuator size, energy efficiency, and storage requirements. Models have been developed which address each of these design constraints and requirements for PAMs, but many of those models lack the accuracy required for their use in a world of increasingly tight design spaces, and improvements to those models has remained stagnant for years.
While continual improvements have been made in modeling the force response of PAMs, there has been little recent progress in the development of methods for characterizing the size and overall shape profile of PAMs during operation, parameters commonly used for calculating efficiency, fluid storage, and flow rate requirements. The PAM’s shape profile (
Figure 1) has long been approximated through visual observations, and has often been cited as a suspected source of modeling error [
1,
2]. This paper seeks to remedy this by providing a new method of accurately measuring the PAM’s shape profile.
With the simple construction of an elastomeric bladder, a surrounding helically braided load-bearing sleeve, and rigid end-fittings at each end, a pressurized contractile PAM can provide a tensile force along its longitudinal axis. Upon internal pressurization of the PAM, the radial pressure force of the internal fluid is transferred through the bladder to the braided sleeve. The braided sleeve transforms that radial force into an axial force expressed at each end-fitting. The actuation force produced by a PAM is a function of its active length and internal pressure states. The actuation force is at a maximum at its resting length, when the braid angle, defined with respect to the radial axis of the PAM, is at a maximum. As the PAM contracts, the braid angle reduces and the bladder strain increases, resulting in a reduction of actuation force until the PAM reaches a pressure-dependent maximum free contraction in its zero-actuation-force state.
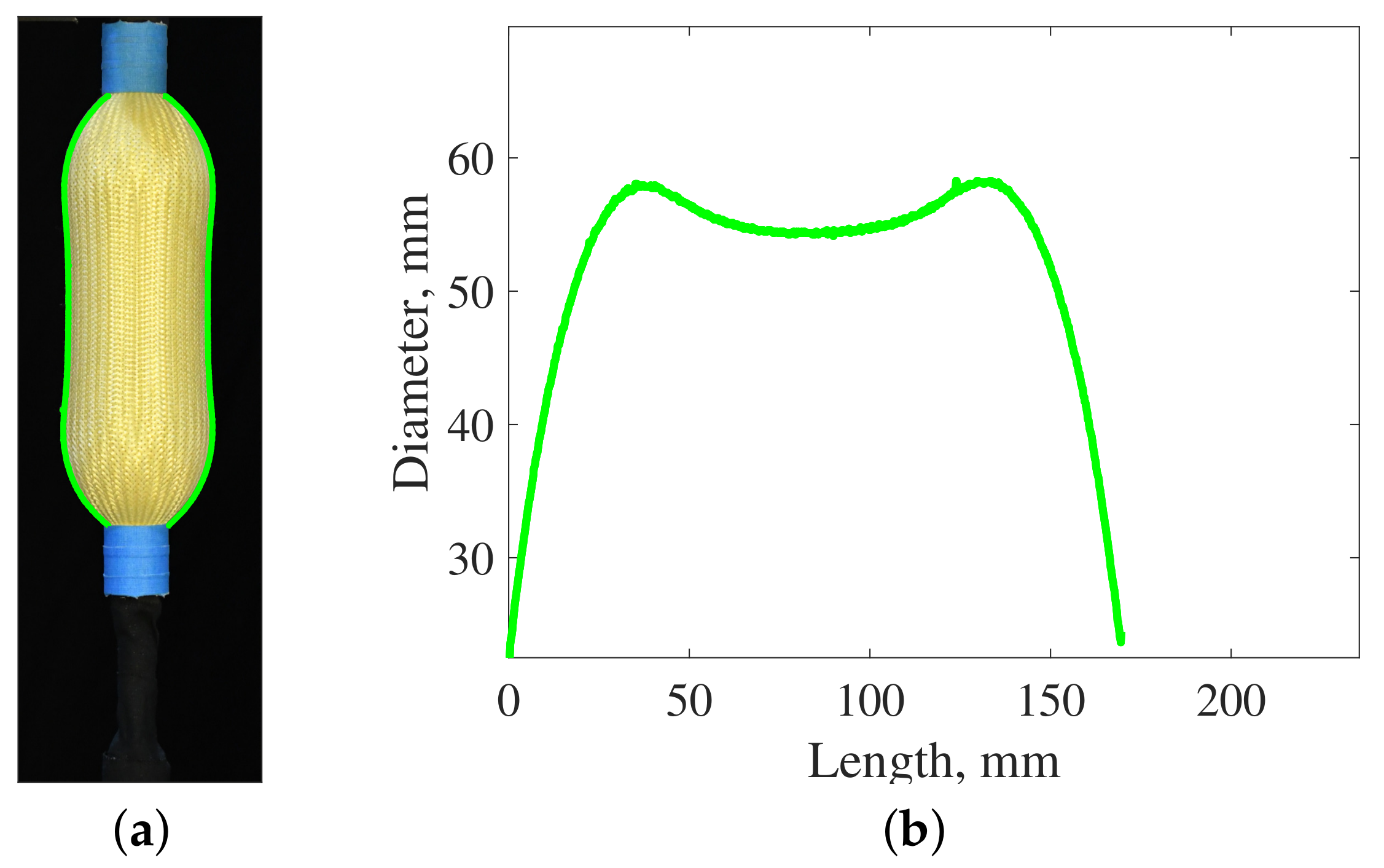
The shape profile of a PAM changes with contraction of its length (
Figure 2a). At its resting length, the PAM has an apparent constant diameter and braid angle along its length. As a PAM contracts in length, its diameter expands and the braid angle reduces as a function of the position along the length of the PAM. The braid geometry is constrained only at each end-fitting where the diameter is equal to the initial diameter. The shape profile is also highly dependent on the PAM, with PAMs of identical material construction having visible differences in their shape profile (
Figure 2b). PAMs have had shape profiles that range from a more cylindrical mid-section shape to ones that have constant variations in curvature along their entire length. The bulbous shape of a PAM is often approximated as a cylindrical profile with a constant diameter along its entire length (
Figure 3). Assuming the braid is inextensible, the cylindrically approximated shape enables a simplification of analysis through the so-called
triangle relationship that correlates the PAM’s diameter, braid angle, and active length. This
cylindrical approximation serves as the basis for many existing PAM models, including models for volume and actuation efficiency, as well as for force-response models that have been developed using both force-balance [
3] and principle of virtual work approaches [
4].
Past modeling efforts of PAMs have often centered around rudimentary representations of their shape profile. While the cylindrical approximation of the shape profile simplifies analysis and modeling, it has often been cited as a suspected source of error, thus making it the subject of more detailed modeling efforts [
1,
2,
5,
6,
7,
8,
9]. Many researchers have inferred that the reduction in diameter near each end-fitting produces what is often termed as
end-effects that act to decrease the force response of the PAM. Modeling corrections that take end-effects into account for the principle of virtual-work models often attempt to serve to more accurately calculate the internal volume of the PAM. Correction efforts for the force-balance modeling method have centered around the effective reduction of active length due to the non-cylindrical shape profile. Tondu [
7] was the first to use an end-effect correction factor by including a tuning parameter that effectively amplified the contraction ratio in the force response equation. Kothera et al. [
1] took a similar approach by reducing the effective active length in the model by two-times the difference of the current and initial radius. Most models that have taken the shape profile of the PAM into account have maintained a cylindrical approximation for the PAM’s midsection, while applying shape corrections to the regions near the end-fittings at each end. Assumed shape profiles have included a stepped cylindrical approximation [
8], a 90 deg circular arc [
5,
10], a semi-ellipsoid [
6,
9], a conic frustum [
8], and the partial surface area of an elliptic toroid [
2]. These shape profiles are often selected based on qualitative observations and ease of computation. Only Meller et al. [
9] has noted that volume measurements appear to show that the cylindrical approximation may be sufficient for modeling the internal volume of the PAM.
Our experience with PAMs has found that the overall shape profile of a PAM is variable, and often exhibits undulating curvature along the full length of the PAM. Having a quantitative method of measuring the shape profile of PAMs would be highly beneficial for improving the accuracy of models that rely on PAM geometry.
Having a more accurate measurement of the shape profile would also aid in characterizing the PAM’s internal volume which is often used in defining an actuator’s system requirements such as the working fluid flow rate and storage volume requirements. First-cut estimations of internal volume are often made using the cylindrical approximation of the PAM, while end-effects corrections are sometimes included to account for the reduced volume near each end-fitting with unknown improvements to accuracy. Some researchers have turned to quantifying the internal volume through experimental approaches [
9]. While experimental methods should provide accurate calculations of internal volume, they often require specialized test equipment. To date, experimental methods have required either submerging the PAM in water, or pressurizing the PAM using water from a closed graduated cylinder [
9], and then tracking the change in water level as the PAM contracts in length. The specialized equipment required for characterizing the volume using these methods not only subject the PAM to fluid that its material composition may not be compatible with, but also requires adjustment, replacement, or even redesign of the test setup components depending on the size and length of the PAM to be tested. Conversely, an experimental method that can test PAMs of all sizes while not requiring specialized equipment is desirable.
It is evident that previous PAM research efforts have relied on multiple different assumed shape profiles without consensus on which ones best fit the observed profiles, and without any conclusive measurement of their accuracy. This paper seeks to provide an experimental method that enables quantitative analysis of the shape profile of PAMs for improved accuracy in modeling efforts. In this research, photogrammetry, the science of making dimensional measurements of physical objects from photographic images [
11], is adapted for use in the measurement of the PAM’s shape profile. An overview of the photogrammetric methods applied in this research are presented first. A test setup for image acquisition is introduced followed by a method of image analysis to render the shape profile measurements from the acquired images. The photogrammetric methods are demonstrated through example by testing a 22.2 mm (7/8 in) diameter, 236 mm (9-9/32 in) long PAM. The results from testing the PAM are presented, followed by analysis of the PAM using the photogrammetric data. The obtained shape profile data is compared to the profiles assumed by the cylindrical approximation. The validity and accuracy of the cylindrical approximation is tested. If more detailed and accurate modeling forms are required, the development of a fit equation is presented for use that accurately replicates the curvature of the PAMs shape profile. Potential improvements to current modeling efforts are also presented, including a demonstration of how easily inaccurate initial geometric conditions can be applied to models without having photogrammetric data available to reference. The profile data is then used to present a simple and accurate method of characterizing the internal volume of PAMs. Finally, the ability of the photogrammetric test method to be universally adopted is demonstrated through shape profile characterizations of PAMs ranging in length from 236 mm to 508 mm, and diameters of 22.2 mm and 57.2 mm. Overall, this paper aims to provide a new method of characterizing PAMs that has the potential to enlighten future modeling efforts with findings that are not otherwise realizable, and with measurements that have not previously been quantifiable.
5. Analysis
Photogrammetry provides the first quantitative measurements of the shape profile of PAMs, and opens the door for new and improved modeling efforts. As a first step towards analysis of these shape profiles, each shape profile—which is comprised of thousands of data points—must be defined in simpler terms. One method could be to define each shape profile by a single value such as the average or maximum diameter of the profile. Defining the profile by a single diameter value assumes a cylindrical profile, and enables the measured data to be used with current modeling frameworks that have an input of a single approximated cylindrical value. Now, if a more detailed analysis of the shape profile is desired, each profile dataset can be defined by a fit equation. A Fourier series fit equation is presented as a good candidate for accurate representation of the PAM’s shape profile.
The shape profile data can also be compared to the cylindrical diameters that have been assumed in previous work. Prior to the quantitative analysis methodology presented here, the cylindrical diameter could only be estimated based on approximations derived from the resting (uncontracted) geometry of the PAM. We will term these the estimated cylindrical shape profiles. The accuracy of these shape profile estimates has gone relatively unchecked. Using the measured shape profile data, we now have the ability to test the accuracy of these estimated cylindrical approximation shape profiles.
Finally, analysis of the measured shape profile provides the unique opportunity to define the internal volume of PAMs. Using an assumption of axisymmetry along the longitudinal axis of the PAM, two-dimensional photogrammetry measurements can be used to approximate the internal volume through a non-intrusive method that is much simpler than previous methods that have required costly and intrusive measurement setups.
5.1. Shape Profile Analysis
5.1.1. Profile Average Diameter
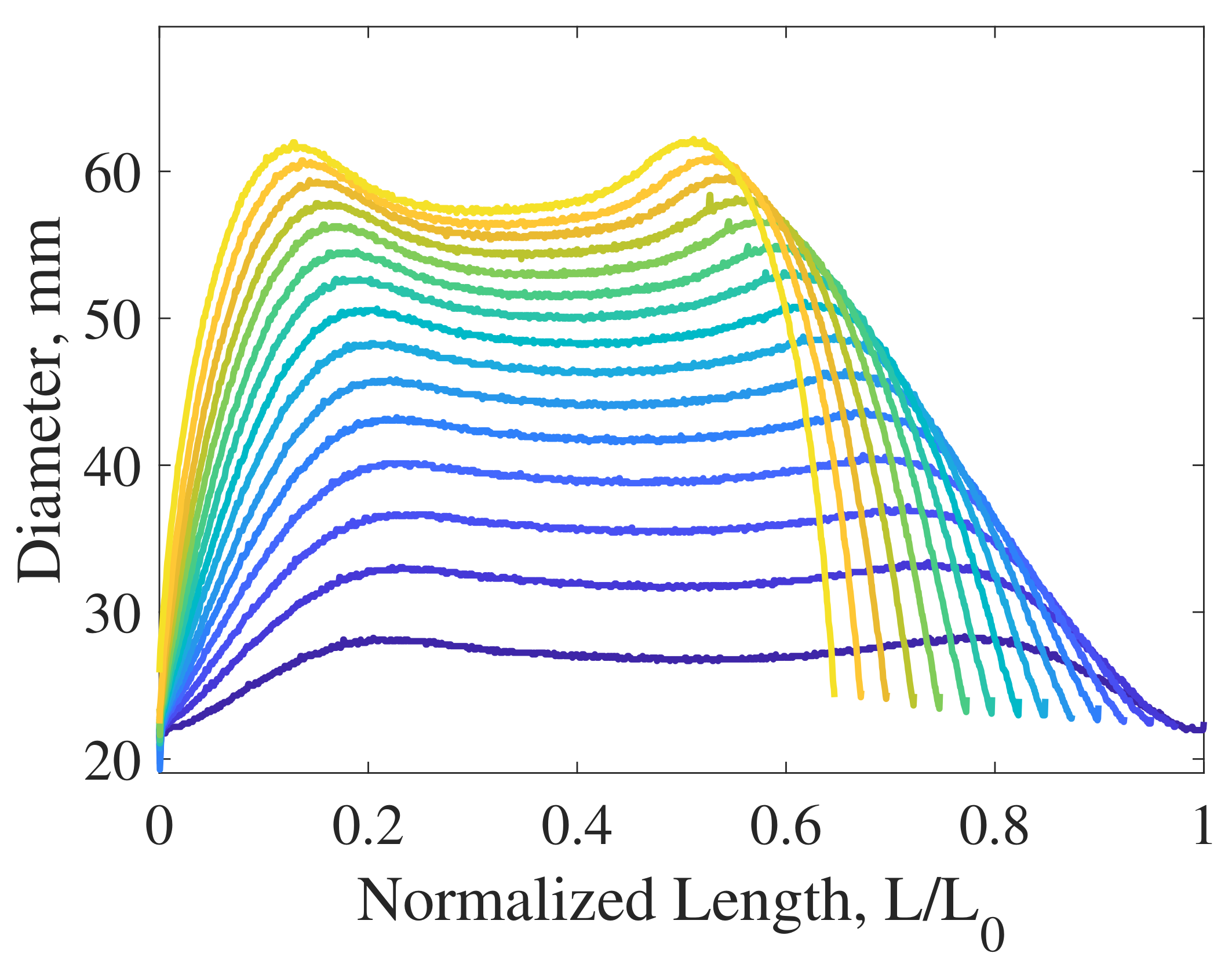
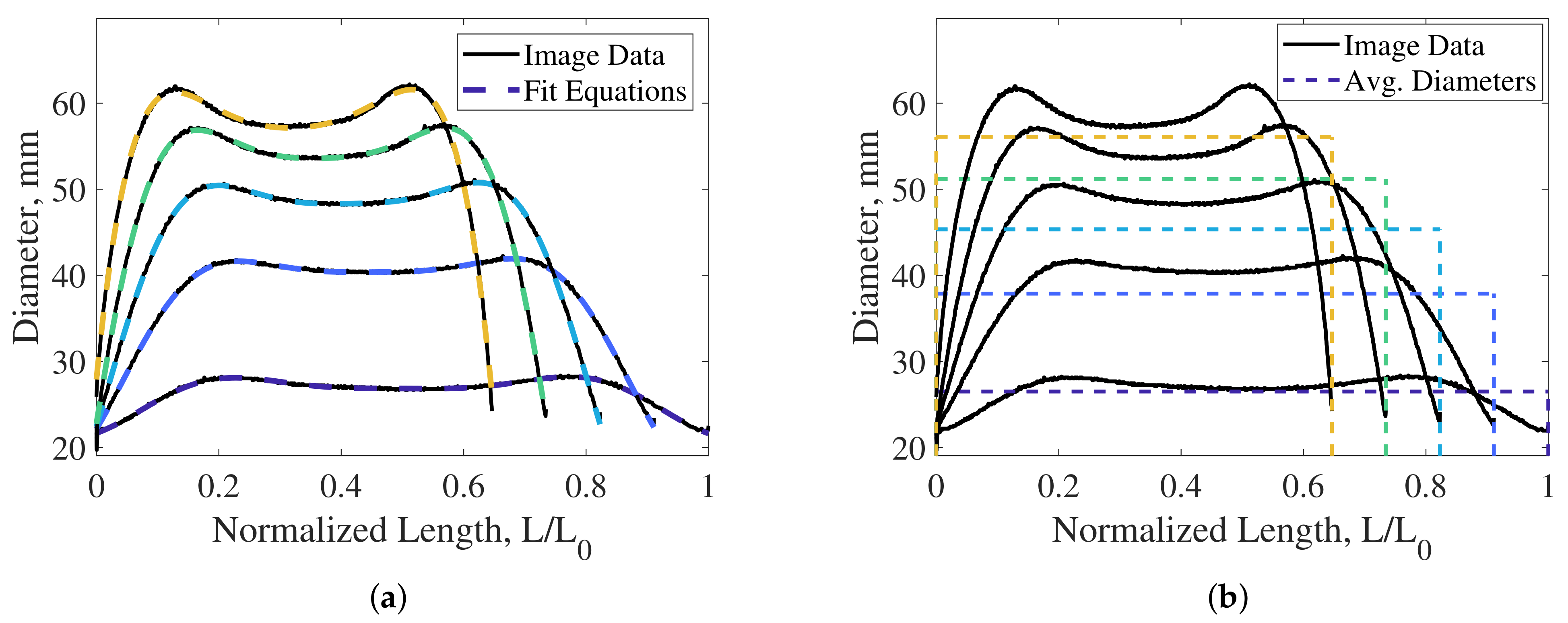
The average (mean) diameter is easily calculated from the raw shape profile data (
Figure 13), and is the simplest representation of a shape profile for analysis. The mean diameter of the entire length of each traced outline is calculated. With the average defining a single diameter value for each profile, the resulting assumed cylindrical profile is in contrast to the complex curvature of the measured profile (
Figure 14b). The average profiles result in average diameters that are about 10% below the maximum diameter due to the dramatic decrease in diameter at each end of the PAM in proximity to the end-fittings. The average diameter was calculated for the entire contraction range of the PAM at each pressure (
Figure 15a). The results suggest that the radius is nominally independent of internal pressure. Closer inspection of the average diameters, however, reveals small increases in diameter with pressure. This is especially apparent in the zero-contraction state, where the diameter swells by about 0.5 mm from 20 psi to 100 psi. This appears to capture the affect of tensile stretching of the braid, a phenomenon that had not previously been captured. Stretching of the braid has often been ignored with a rigid braid assumption, but has also been accounted for—without the benefit of having quantitative data—in some modeling efforts [
1,
27]. Further investigation of the apparent increase of the braid diameter at fixed length states with increases in pressure warrants further investigation in future work.
5.1.2. Profile Fourier Series Fit
Previous assumed shape profiles have failed to accurately capture the complex curvature of the PAM’s shape profile. Piece-wise profile definitions used for attempted corrections on the cylindrical profile approximation—which typically use separate equations to define the profile of the midsection and the region near each end-fitting—increase modeling complexity with unvalidated improvements in accuracy. A single equation representation of the measured shape profiles is desired for simplicity of analysis.
Curve fit equations are used to fit the measured shape profiles. With multiple forms of fit functions to choose from (e.g., polynomial, exponential, etc.), it is important to select a function with a characteristic shape that resembles the shape of the observed profiles to enable an accurate and low-order fit equation. Since the observed profiles draw a resemblance to a half-sine pulse with higher-order harmonics, a Fourier series curve fit equation was selected. The form of the fit equation is given as:
where
x represents the position along the length of the shape profile,
provides a horizontal shift,
n indicates the order of the harmonic, and
and
are terms that scale the magnitude of each harmonic. Values of
,
,
, and
w are found for each measured profile by performing a nonlinear least-squares fit (using MATLAB’s fit() function). The number of terms used for the fit is adjusted to achieve a good fit while also keeping the number of terms to a minimum for simplicity. A third-order Fourier series fit was found to achieve a very good fit of the shape profile data (
Figure 14a). The resulting fit has a low combined average error for all tested states of contraction. The accuracy of the fit of this PAM begins to plateau with the use of three or more terms.
Table 2 provides a comparison of the accuracy of the fit depending on the number of terms used. Values for each term of the three-term Fourier series fit performed in
Figure 14a are provided in
Table 3. Some of the coefficient values found for the fit functions, as shown in
Table 3, can appear to be erratic, and may require additional constraints on the fit function for smoother variations of parameters between measured profiles.
For a complete characterization, a fit function can be found for all of the profiles measured during tested states of pressures and contraction. As noted from previous observation of
Figure 15a, the profile is predominantly a function of the contraction state with little variation with changes in pressure. This enables a reduction in the number of required fits to fully define the shape profile of the PAM by only needing to characterize the shape profiles of the maximum pressure tested.
5.1.3. Comparison to Previous Cylindrical Profile Estimates
The shape profile of PAMs has traditionally been modeled as a cylindrical profile. The diameter of the PAM can be estimated for all states of contraction by using this cylindrical approximation and an assumed initial geometry. The estimated profile diameter has long been assumed to be nominally accurate enough for use in almost all modeling efforts of PAMs. However, with no previous method of measuring the actual shape profile of PAMs, there has not been any quantifiable data to check the accuracy of these estimated cylindrical profiles until now. With the shape profile measurements acquired using photogrammetry, the accuracy of the cylindrical shape profile approximation can now be tested.
The cylindrical approximation has served as the basis of most PAM modeling since the inception of the PAM back in 1958 [
28]. The cylindrical approximation, prior to the addition of any applied correction factors, makes the following assumptions:
The shape profile is cylindrical (constant diameter with respect to length)
The braid angle is constant with respect to length
There is no strain in the braid fibers
With these qualifying assumptions, the geometry of the PAM can be defined using the
triangle relationship which defines a set trigonometric relationship between the active length,
L, diameter,
D, and braid angle,
, of the PAM through fixed values that are the length of each braid fiber,
B, and the number of turns of each braid fiber around the circumference of the PAM,
N [
4]. The fixed values of
N and
B, can then be found using the initial geometry of the PAM defined by the initial braid angle,
, the initial diameter,
, and the initial active length,
, through the following relations:
Finally, the diameter of the PAM can be estimated as a function of active length through the following relationship:
The established direct relationship between
and
L produces estimated diameter values—commonly used as an input parameter to models—through relatively simple geometric relationships. However, it is also relatively sensitive to the assumed initial geometry of the PAM. The value of
is commonly assumed to be equal to the resting outer diameter of the bladder (assuming a thin braid), or the braid diameter at its point of insertion into the end-fitting. The value of
can then be determined using the method covered in Pillsbury, (2015) [
29] which uses the linear relationship between blocked force and pressure to solve for
. It should be noted that the value of
found through this method is a function of the estimated value of
.
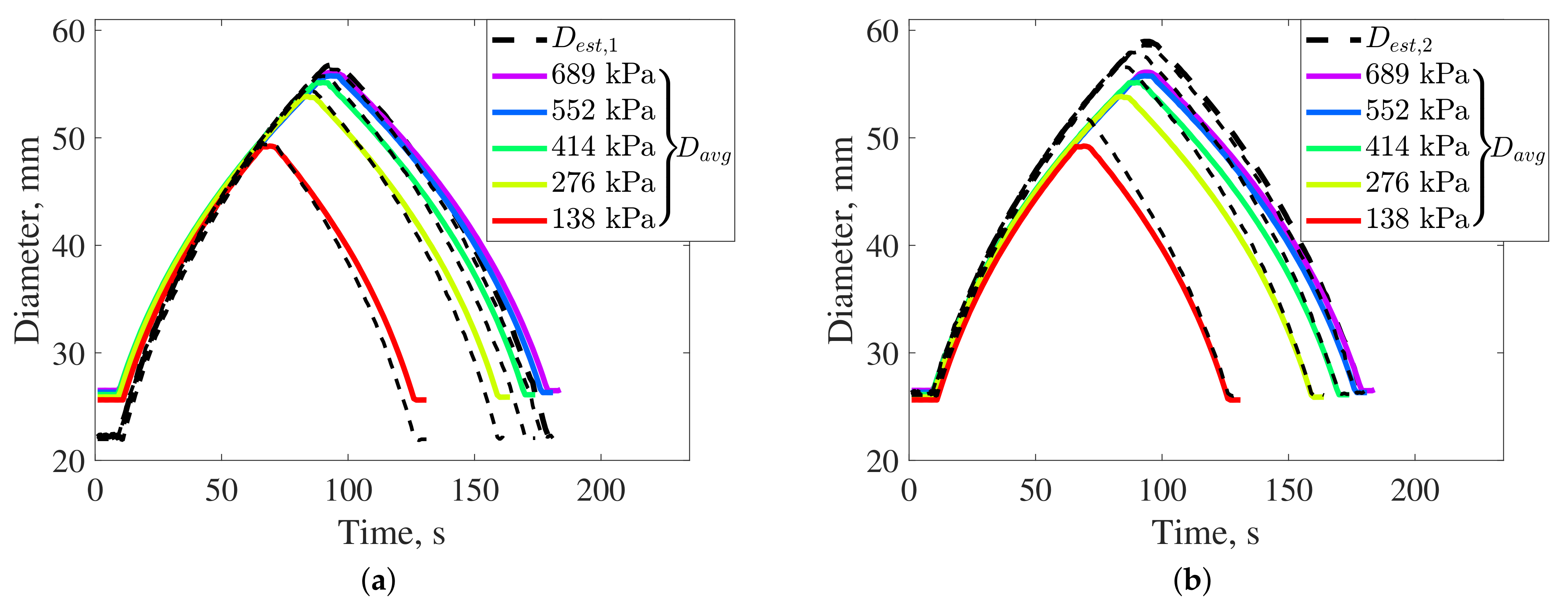
The average diameter of the measured profile data will be compared to the estimated cylindrical profile. The assumed cylindrical profiles for both the estimated and average of the measured data provide a basis of direct comparison. An accurate estimated profile diameter should match the average of the measured profiles.
The value of
for the tested PAM is equal to the outer diameter of the bladder at 22.2 mm (7/8 in). An estimated value of
was found using the blocked force with respect to pressure data to be 72.27 degrees. The resulting estimated diameter values, labeled as
, are compared to the results of the measured data in
Figure 16a for a single stroke of the PAM. There is an observed error in the estimated value of
which is about 3.8 mm (0.15 in) below the initial measured average diameter of about 26.0 mm (1.025 in). This initial increase in diameter was not due to any noticeable slack in the braid prior to pressurization, with the braid being taut in the resting length state. The resulting discrepancy between the estimated and measured diameters is especially large at low levels of contraction.
With knowledge of the actual value of
, using the measured data we can attempt to estimate the shape profile again with corrected values of
and
. Since there is a slight range of the measured initial diameter values with respect to pressure, the average of these measured values of 26.0 mm (1.025 in) can be used for this comparison. This value of
results in a value of 69.04 degrees, a significant difference from the previous value of 72.27 degrees. Estimated diameter values,
, are calculated using the new initial geometry conditions (
Figure 16b). With proper alignment of the curves at low levels of contraction, there is now a sizeable error in the maximum contraction state. The resulting error between curves could be the result of the estimated value of
being too high. A lower value of
would result in lower values of estimated maximum contraction. If the value of
is reduced to 68–68.5 degrees with
still equal to 26.0 mm, the estimated and measured diameter curves match very well. However, an accurate physical measurement of the value of
N for the tested PAM found that the braid angle should be around 68.9–69.7 degrees which coincides well with the value of
used to define
. It is therefore likely that the discrepancy between the values of
and
are a result of error from using the cylindrical approximation for the estimated diameter values. The cylindrical approximation, in estimating a diameter from the initial geometry state, neglects the length of the braid that is effectively lost to the curvature of the PAM’s braid resulting in overestimates of the estimated diameter. This research serves as an initial comparison of these estimated and measured diameter values, with the resulting discrepancy between these values deserving of further investigation.
5.2. Volume Approximation
Measurement of a PAM’s internal volume is often required for actuation system design and modeling efforts. Estimates of volume are necessary to determine requirements of the system such as the working fluid flow rate and storage requirements. Modeling efforts also use values of internal volume for force-response models (e.g., virtual work method), as well as for providing estimates of actuation efficiency. The acquisition of accurate volume measurements has often proved difficult for researchers due to the specialized equipment that is often required to do so. As a consequence, researchers have often settled for using dimensions provided by using the estimated cylindrical approximation diameter.
The photogrammetric data acquired in this research provides the opportunity to easily obtain an accurate estimation of the internal volume of the PAM for all tested pressure and contraction states. Since the profiles only provide a two-dimensional depiction of the PAM, a three-dimensional measurement of volume requires the assumption that the PAM is axisymmetric about its longitudinal axis. The symmetry of many previously tested PAMs usually makes this a reasonable assumption. Appreciable deviations from symmetry have only been observed for PAMs with flaws in their fabrication.
Using the shape profile data, the internal volume of the PAM,
, can be found using the following basic equation:
where,
is the volume encased within the outline of the shape profile of the PAM,
is the volume consumed by the incompressible bladder, and
is the volume of the braid. Therefore, Equation (
11) states that the internal volume of the PAM is equal to the volume within the shape profile minus the volumes of the bladder and braid that are also contained within the shape profile volume. The bladder and braid volumes are fixed values that can easily be found using their cylindrical dimensions in the PAM’s resting length configuration (i.e.,
). For the PAM used in this research, the braid has an assumed resting diameter of 21.9 mm (0.863 in) equal to that of the end-fitting at each end, and a thickness of 0.28 mm (0.011 in) resulting in a value for
of 4.47 cm
(0.273 in
). The incompressible bladder has a resting outer diameter of 22.2 mm (7/8 in) and thickness of 1.6 mm (1/16 in), resulting in a bladder volume,
, of 24.26 cm
(1.481 in
).
The volume
can be found through integration of the defined shape profile (Equation (
12)). The method of integration is dependent on how the shape profile is defined. In this paper, the diameter of the shape profile has been defined as a discrete function
, with the width of the PAM defined for each pixel
i along the length of the PAM, and as a continuous function,
, defined by the Fourier series fit equations used to describe the shape profile of the PAM. To find
for the discrete definition of the shape profile, integration is performed as a summation of the volume of each pixel-width slice of the PAM. This discrete integration is shown in Equation (
12), where
is the width of each pixel, and
is the current length (in pixels) of the PAM. The continuous function definition of the shape profile provides a much simpler method of calculating the volume of the PAM. As shown in Equation (
12), disc integration is performed to calculate the volume
using the continuous function form of the shape profile,
. The cylindrical approximated diameter of the PAM,
, having been shown to accurately represent the average diameter of the PAM, can also be used to calculate the volume
of the PAM.
Using the discrete form of the shape profile data, the internal volume of the tested PAM is calculated as shown in
Figure 15b. As is predicted from the average shape profile diameter results of
Figure 15a, the volume is a function of the length state of the PAM and is effectively independent of internal pressure. There is only a slight deviation in volume with respect to pressure due to the assumed stretch in the braid. These results can be easily adjusted to provide values for the change in volume required for contraction of the PAM as would be needed for flow rate and efficiency calculations.
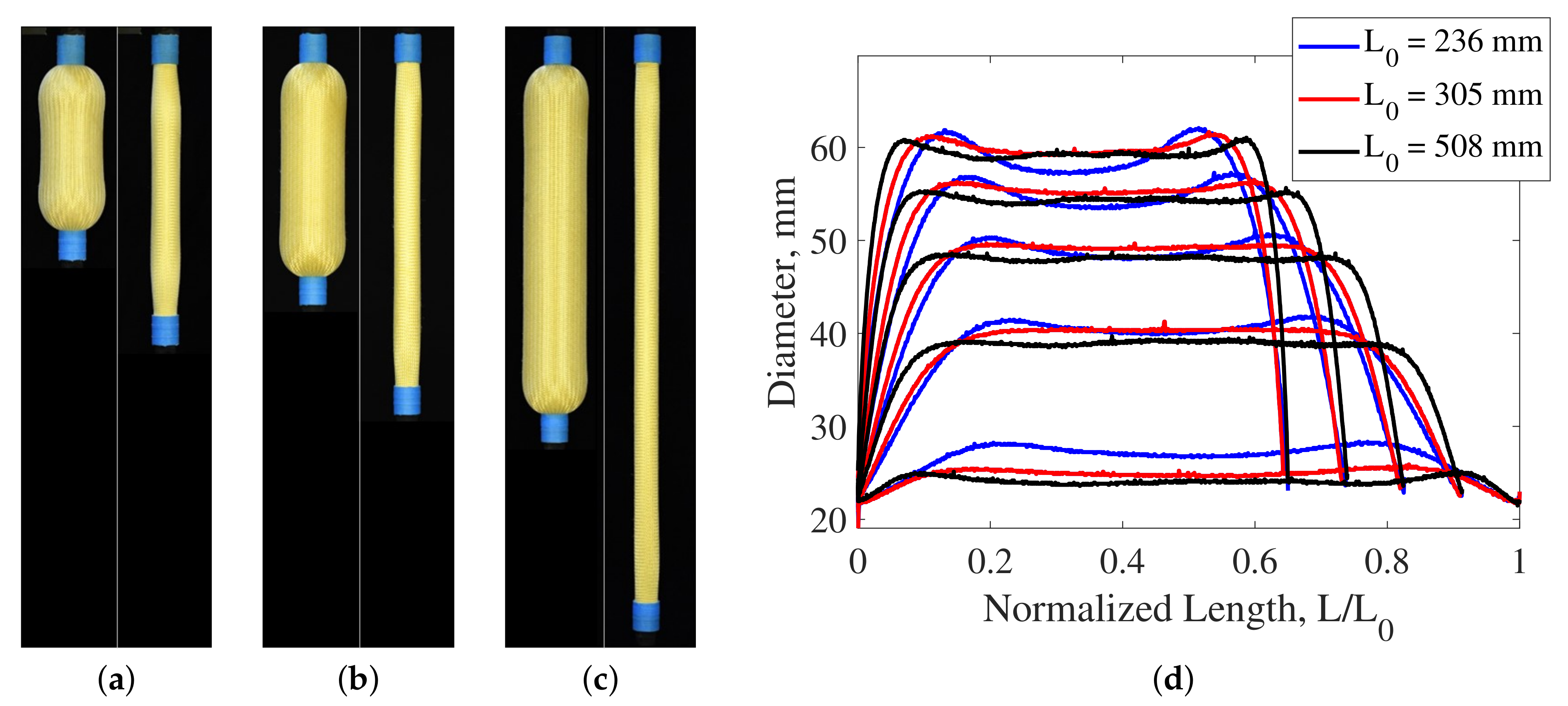
5.3. Testing of Different PAMs
A few other PAMs have been characterized thus far using the photogrammetric methods as described above. Three 22.2 mm (7/8 in) diameter PAMs and one 57.2 mm (2 1/4 in) diameter PAM have been characterized using photogrammetry. The three 22.2 mm diameter PAMs have identical material construction. The 236 mm (9 9/32 in) long PAM has been used to demonstrate the photogrammetric methods up to this point, and PAMs with 305 mm (12.0 in) and 508 mm (20.0 in) lengths have also been tested (
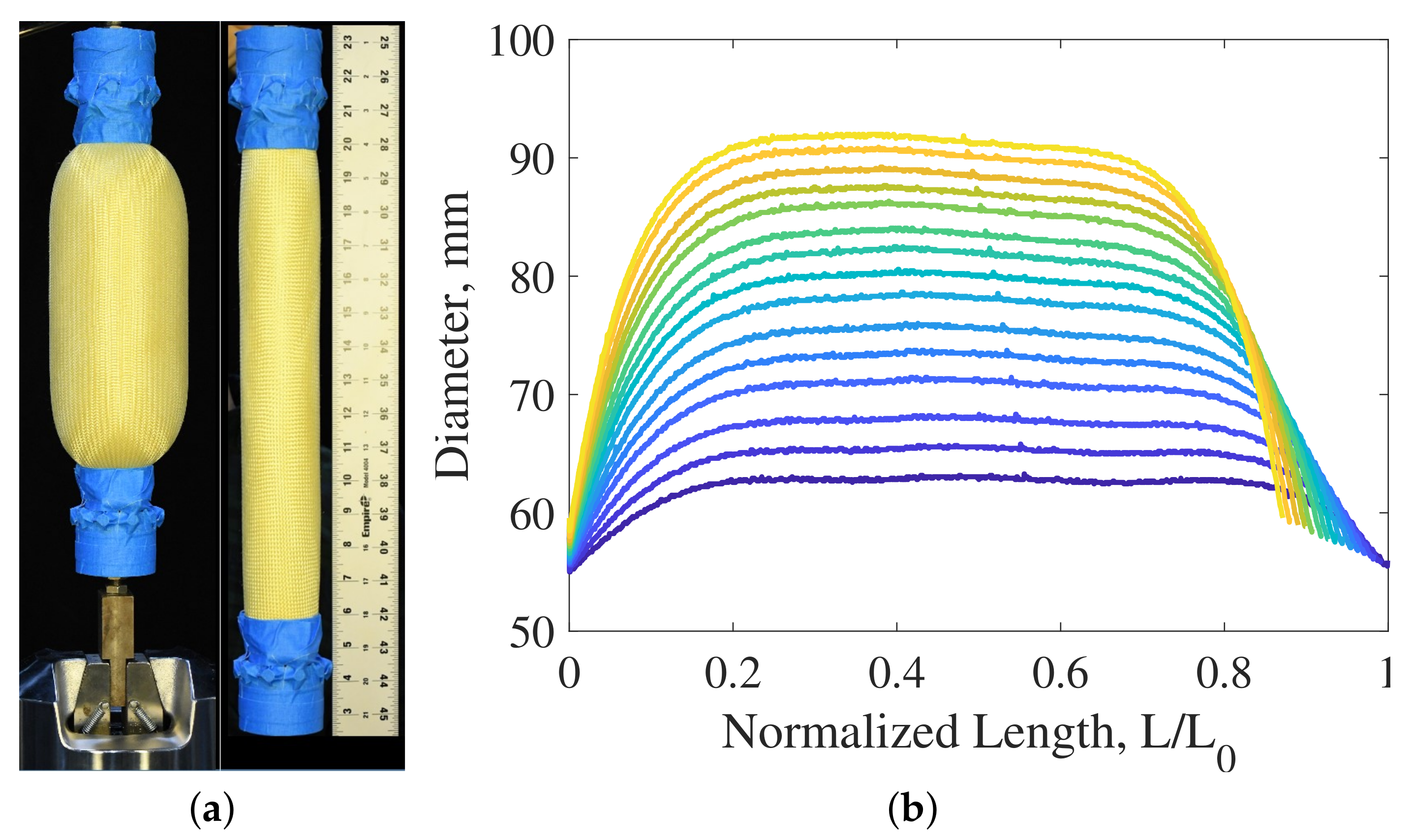
Figure 17). These PAMs were tested to compare their shape profiles while also demonstrating the ability of the photogrammetric test setup to characterize PAMs of varying length scales. Analysis of the 57.2 mm diameter by 351 mm (13 13/16 in) long PAM (
Figure 18) further demonstrates the capability of the test method to characterize PAMs of a wide range of diameters.
The shape profiles of the 22.2 mm diameter PAMs are compared in
Figure 17d for the same five states of percent contraction. Despite their slight differences in shape, their resulting diameters are very similar. The three PAMs were all able to achieve nearly identical free contraction values at 689 kPa (100 psi) of 35.43%, 35.55%, and 35.36% for the 236 mm, 305 mm, and 508 mm PAMs, respectively. Each of their profiles has an undulation at each end of the PAM that resembles the previously noted peanut-like shape which seems to be a characteristic of many PAMs. The shape profile of the 508 mm (longest) PAM has an additional small undulation at its mid-length that is barely visible. A Fourier series fit was conducted on the three PAMs resulting in an accurate representation of their profiles. A three-term Fourier series provides an accurate fit for the 236 mm and 305 mm long PAMs, while the additional undulation of the 508 mm long PAM profile requires a four-term Fourier series to achieve a good fit. The largest discrepancy between the profiles comes in the zero-percent contraction state, where the 236 mm PAM has the largest average diameter of the three. The difference in initial diameters is reflected by the difference in their estimated initial braid angles. The three PAMs had estimated initial braid angles of 69.4, 71.1, and 71.9 degrees for the 236 mm, 305 mm, and 508 mm PAMs, respectively. With all three PAMs using the same braid, the differences in initial braid angle and diameter indicates slight differences in their fabrication or identification of their resting length. As previously noted from observation of
Figure 15a, the diameter of the PAM is much more sensitive to changes in length at lower states of contraction, so a small deviation in length or braid angle near the resting length state results in a relatively large change in the expected diameter.
The shape profiles of the 57.2 mm diameter PAM, as shown in
Figure 18b, are also accurately captured using the described photogrammetric methods. The simpler rounded shape of its profile allows for an accurate Fourier series fit of the profiles to be achieved with the use of only two terms.
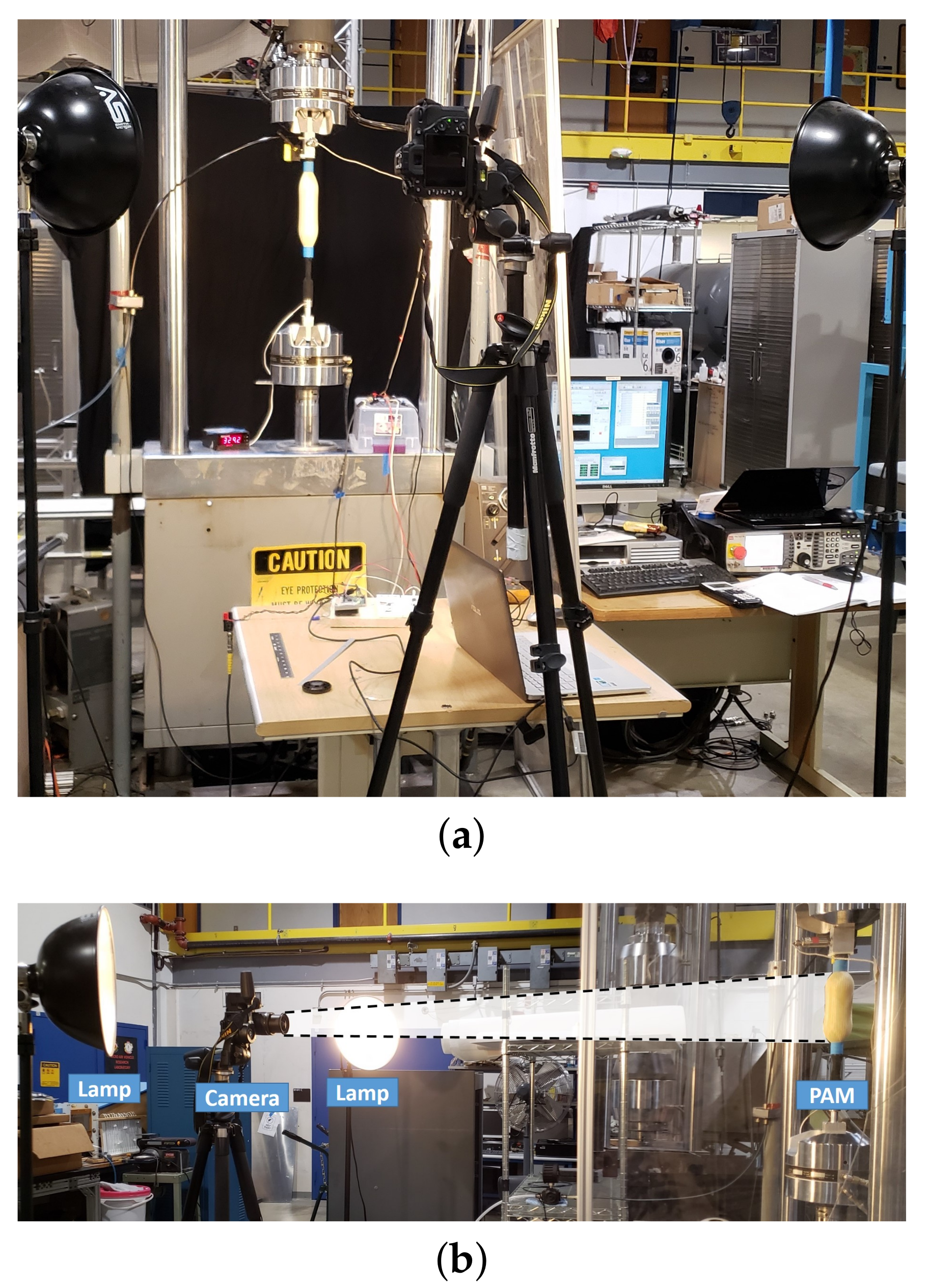
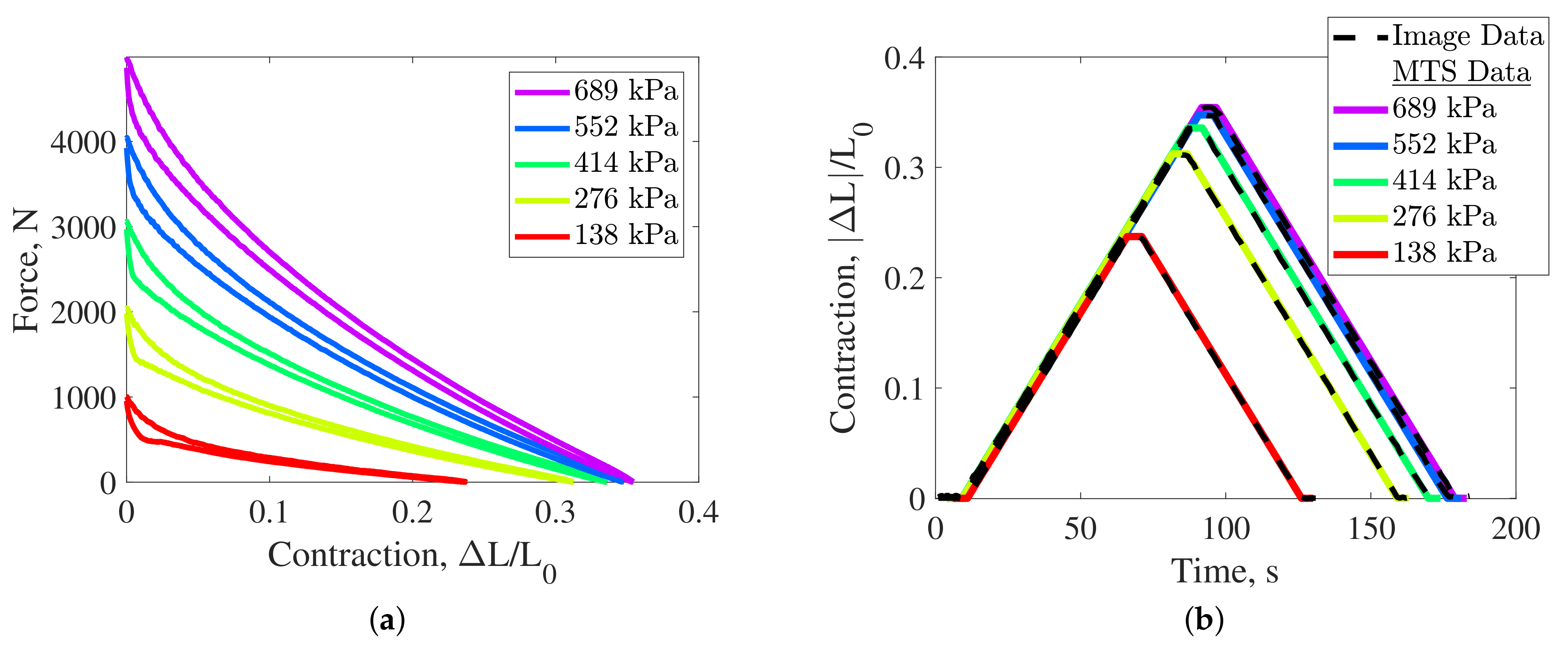
Testing of both the 22.2 mm diameter by 508 mm long PAM, and the 57.2 mm diameter by 351 mm long PAM, represents the maximum extent of what has been produced with regard to sizing of PAM lengths and diameters, respectively. Although the photogrammetric measurement of PAMs of different sizes might seem trivial, many previous test setups for PAM volume testing have required modifications or redesigns in order to administer tests for PAMs of different sizes. Photogrammetric characterization is capable of testing PAMs with a large range of sizes by just repositioning the camera to capture and fill each image with the entire PAM. As mentioned earlier, the positioning of the camera will effect the accuracy of the photogrammetric measurements. The accuracy is dependent on the competing effects of attempting to reduce the angle-of-view by distancing the camera from the PAM, while also keeping the distance at a minimum to maximize measurement resolution. For the 22.2 mm diameter PAMs, the camera was setup at the distance of 152 cm (60 in) for the shorter 236 mm length PAM, and it was placed 7.6 cm (3.0 in) farther away for the longer 508 mm PAM to capture its entire length. Those two camera placements resulted in angle-of-views of 8.84 and 18.04 degrees, respectively, and measurement resolutions of 8.52 pixels/mm (216.35 pixels/in) and 8.92 pixels/mm (226.63 pixels/in), respectively. Both tests achieved a high degree of accuracy despite the slight changes in resolution and angle-of-view. Comparing the contraction measurements of the MTS machine and photogrammetric data, as performed in
Figure 12b for the 236 mm PAM, resulted in a maximum error of 0.61 mm (0.042 in) (0.21%) for the 508 mm long PAM. This is in comparison to the 0.60 mm (0.024 in) (0.25%) error previously cited for the 236 mm PAM. Similarly, measurement of the 57.2 mm diameter PAM achieved results with a maximum error in the length contraction measurement of 1.3 mm (0.05 in) (0.36%). It is assumed that even with the larger diameter of this 57.2 mm PAM, its diameter is still significantly smaller than the length measurement that is used here to cap the maximum expected error in the measurement.
The accurate characterization of the shape profiles of the four PAMs demonstrates that the photogrammetric methods presented in this research can be readily adapted to PAMs of different length and diameter scales. A new method of experimentally characterizing the volume of PAMs has been presented that can be performed without the need for specialized test equipment, and can be easily adapted for the measurement of PAMs of different sizes.
6. Conclusions
This research presents an approach for characterizing the shape profile of PAMs through photogrammetric measurement. The method of measuring the PAM’s shape profile is described including a basic test setup, method of image acquisition, and a process of abstracting measurements from the image data. A 22.2 mm diameter PAM served as an example for describing the presented test method and analysis.
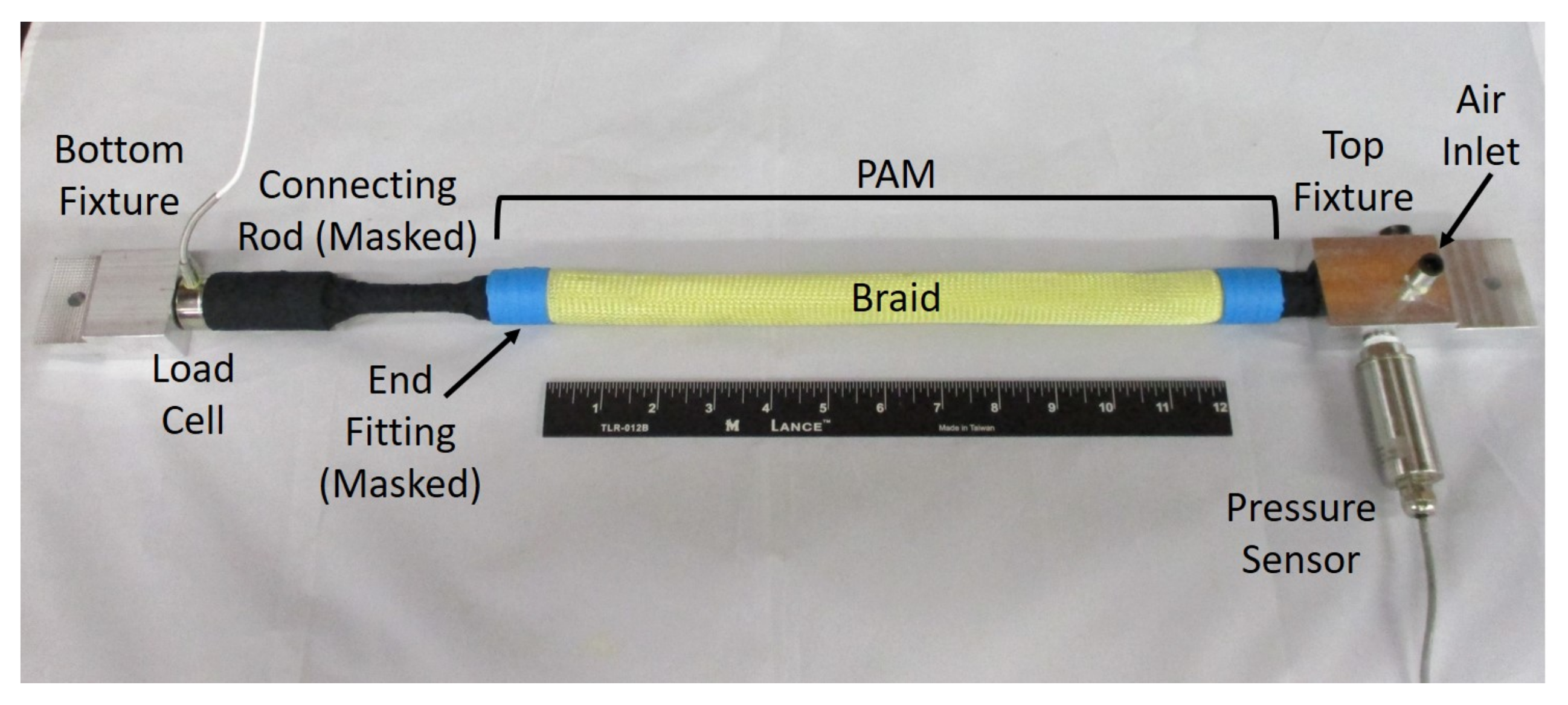
The photogrammetric testing was performed in parallel with the isobaric force-contraction characterization that is typically performed to define the actuation of PAMs. The photogrammetric test setup requires the addition of only a camera, backdrop, lighting, and masking to acquire measurement data. The complete method of acquiring measurements from the image data, including a background on the methods used, was provided in detail to ease the adoption of this characterization method for future research efforts.
Some preliminary analysis of the shape profile data was then performed. The average diameter and volume of the PAM were found to be primarily a function of the contraction state. However, there was an indication of strain in the braid fibers from the small but appreciable increase in PAM diameter with increased pressure. This strain in the braid fibers had not been quantifiable prior to the characterization performed in this testing. The measured shape profiles were redefined from a set of data points to a cylindrical approximation or fit equation. The average of each measured profile was used to define each profile as a single value. This assumes a cylindrical shape profile that can be readily applied to previously existing models. If the assumption of a cylindrical shape profile is not sufficient for a high-fidelity modeling effort, the complex curvature of the shape profiles can be defined to a high-degree of accuracy using Fourier series fit equations. Working with equations instead of the raw shape profile data greatly simplifies usage of the shape profile information garnered from the photogrammetric testing.
The estimated diameters found using the cylindrical approximation and initial geometry have long served as the basis for most PAM modeling. These estimates were tested by comparing them to the measured average diameters of the tested PAM. The comparisons resulted in discrepancies between the estimated and measured diameters, with the first comparison finding an inaccuracy in the initial estimated diameter. After this initial offset in diameter was corrected, the estimated diameters still did not match the measured diameters, warranting further future investigation of the effect of the cylindrical approximation on these estimates.
A new method of characterizing the internal volume of PAMs using the acquired shape profile data was also presented. This new non-contact method of calculating the internal volume is desirable compared to current methods which often require specialized test equipment that must be altered in order to test PAMs of different sizes.
Finally, the accuracy and adaptability of the presented test method is demonstrated through the shape profile characterization of multiple PAMs of different sizes. A comparison of three 22.2 mm diameter PAMs was performed, demonstrating some of the similarities in their contraction-diameter characteristics, and also the slight differences in the undulations and curvature of their profiles. A wide 57.2 mm PAM was also accurately characterized with the same test setup without the need for any modifications. The Fourier series fit was able to accurately replicate the profile data for all tested PAMs with an observed correlation between the number of undulations of the profile’s curvature, and the number of terms required to provide an accurate fit.
The presented method was developed out of a need to be able to quantify modeling unknowns and long-used estimations of diameter, but also out of the necessity to define the dimensions of PAMs for implementation into mechanism designs, and define system requirements for the PAM’s supporting hardware. The shape profile data this new method provides can also be used to improve the accuracy of actuation force model inputs—such as diameter, braid angle, bladder strain, and braid strain—which currently rely on cylindrical approximations of the PAM’s shape profile, and empirically-based modeling corrections. It is the authors hope that this method of characterization can aid in the discovery, confirmation, and necessary adjustments for improved modeling efforts, as well as enlighten and ease the adoption of PAMs by providing a more complete characterization of their actuation.























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}