1. Introduction
Curved shells, whether stiffened or not with structural ribs, that carry dead and live loads have been a great challenge for the engineers and architects of every era. In subsequent epochs, not only were the materials, weight, static diagrams, stiffness of structural elements and joints, spans, and durability of the designed shells and entire buildings changed, but their visual [
1] attractiveness, form coherence, and architectural sensitivity to the natural and built environments have been modified as well [
2].
Since the Roman times, single-curvature shell vaults have been used more and more often, including especially barrel and cross vaults. Since the Gothic style, doubly-curved roof shells with a positive Gaussian curvature [
2] have been built, which was a result of the expected compressive stresses in them [
3]. Stiffening or supporting ribs have been used to join complete smooth shells into a composite shell structure [
3].
The issues related to the search for thin-walled concrete shells transferring a characteristic load were presented by H. Isler inter alia in [
4]. He created models based on the nature-based solutions and conducted experiments with surfaces similar to the so-called minimum surfaces.
Examples and procedures preventing the destruction of reinforced concrete shells were presented by Foraboschi in [
5]. An additional factor that causes damages to roof shells is dynamic influences. Foraboschi discussed the appropriate procedures to prevent unfavorable dynamic influences in [
5,
6]. In addition, in the areas affected by seismic influences, the roof shell structure should be designed to improve the durability and bearing capacity of the designed building [
7].
Shell roofs can simultaneously perform various functions. The multidimensionality of the issues related to their design, construction, and maintenance requires a comprehensive, parametric approach to shaping diversified unconventional architectural forms and the structures of entire buildings roofed with the shells [
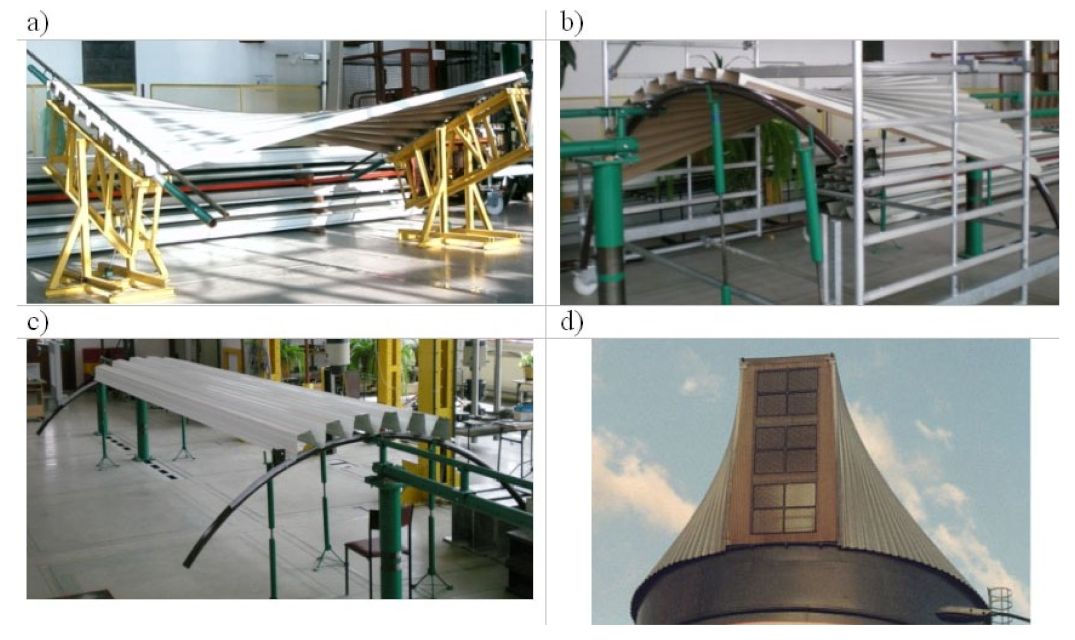
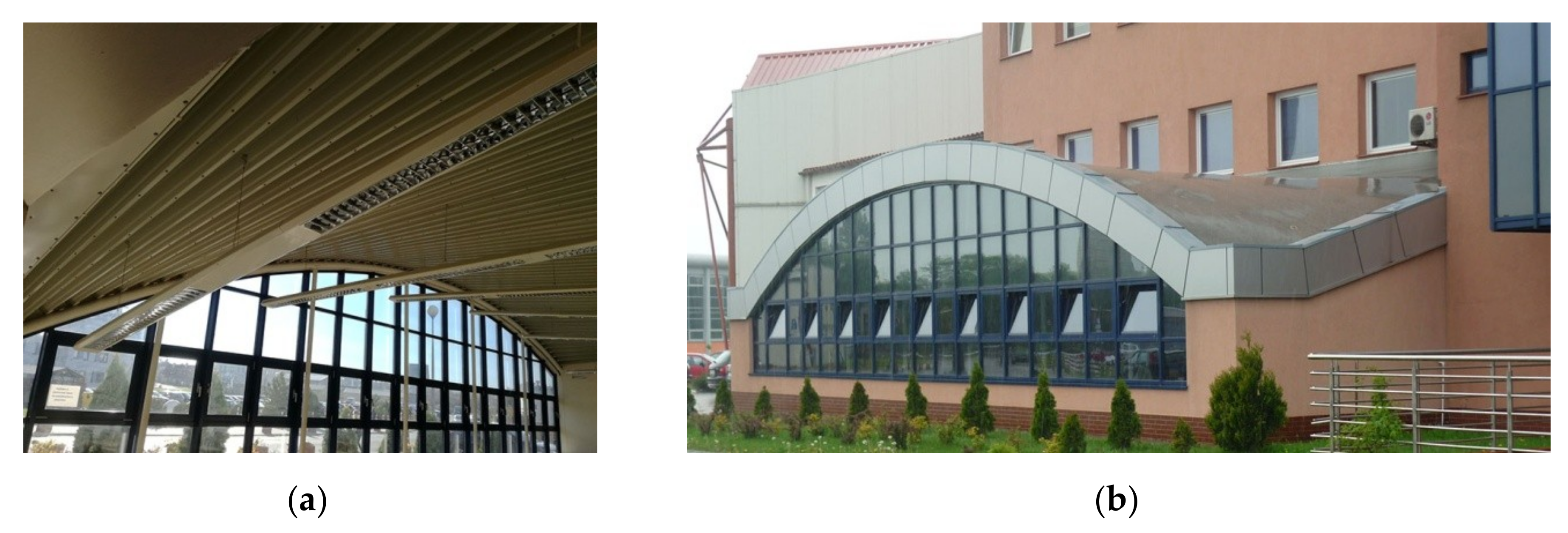
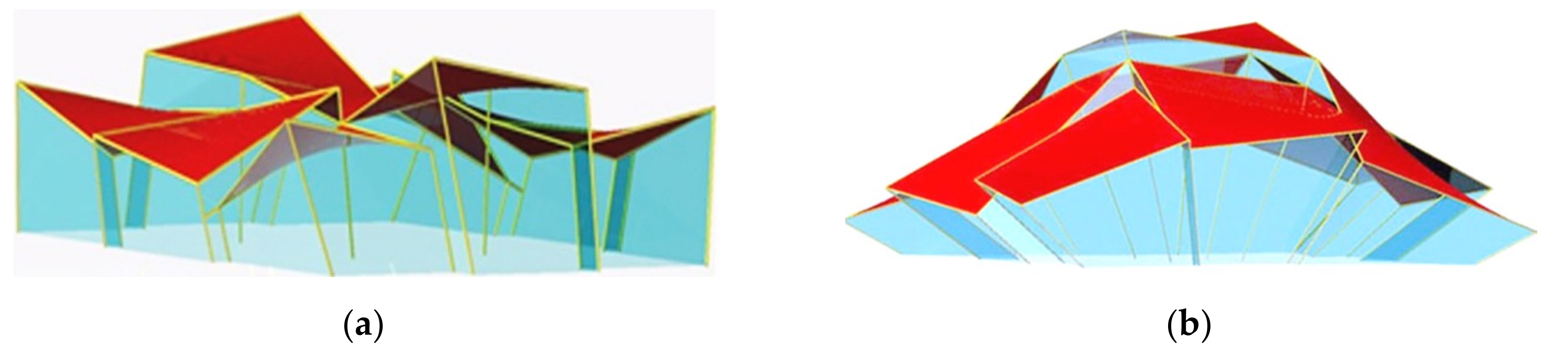
8]. The aspects of the parametric description of the architectural forms are under consideration in this paper. In particular, this paper proposes a parameterization of such roofs that is made up of many nominally plane thin-walled folded steel sheets connected to each other along their longitudinal edges into single continuous plane strips. Subsequently, each strip is transformed into a corrugated shell roof (
Figure 1) as a result of spreading the strip on two skew directrices passing transversally to the fold’s directions [
1].
One of the characteristics of the considered transformed shells is that the directrices stiffen their transverse edges, but their longitudinal edges must be stiffened with additional edge elements in order to maintain the straightness of the border folds in each strip (
Figure 1b) [
1]. This is the first limitation in shaping the transformed shells, which induces additional effort besides the initial stresses caused by the shape transformations that are determined by arranging and pressing each folded strip to the roof directrices. It should be noted that the technique and direction of the pressure of each fold to the directrices should result in the smallest cross-sectional change of the fold, so as not to unduly reduce its capacity and stability.
If the directrices are parallel to each other (
Figure 2c) [
9], the shape transformations do not result in significant values regarding the initial stresses, because the curvatures that are used in most building shell roofs and roof directrices are not unduly large, and the stresses need not be included in the static-strength calculations [
1]. In this case, the shells can take the forms of various cylindrical surfaces. However, if the directrices are not parallel lines [
8,
9], the folds are twisted (
Figure 2a) or twisted and bent (
Figure 2b,d). Moreover, the deformations of their webs and flanges can be considerable and different both along the length of the same fold and in the adjacent folds in a shell. These differences may result in substantial values of compressive stresses in the fold’s half-lengths and tensile stresses at both of the transverse ends of each twisted fold, depending on the degree of the fold’s twist.
The longitudinal edges of each twisted or twisted and bent fold, similar to the longitudinal axes of each pair of adjacent folds in the shell, are skew straight lines, which result in different cross-sections of each shell fold along its length. The experimental tests and computer analyses carried out by Reichhart and Abramczyk [
1,
8] showed that each such transformed shell fold works effectively when its contraction occurs halfway along its length. In this case, the tensile stresses appearing at both transverse ends of the fold are comparable, and they balance the compressive stresses appearing in the middle part of the fold along the length.
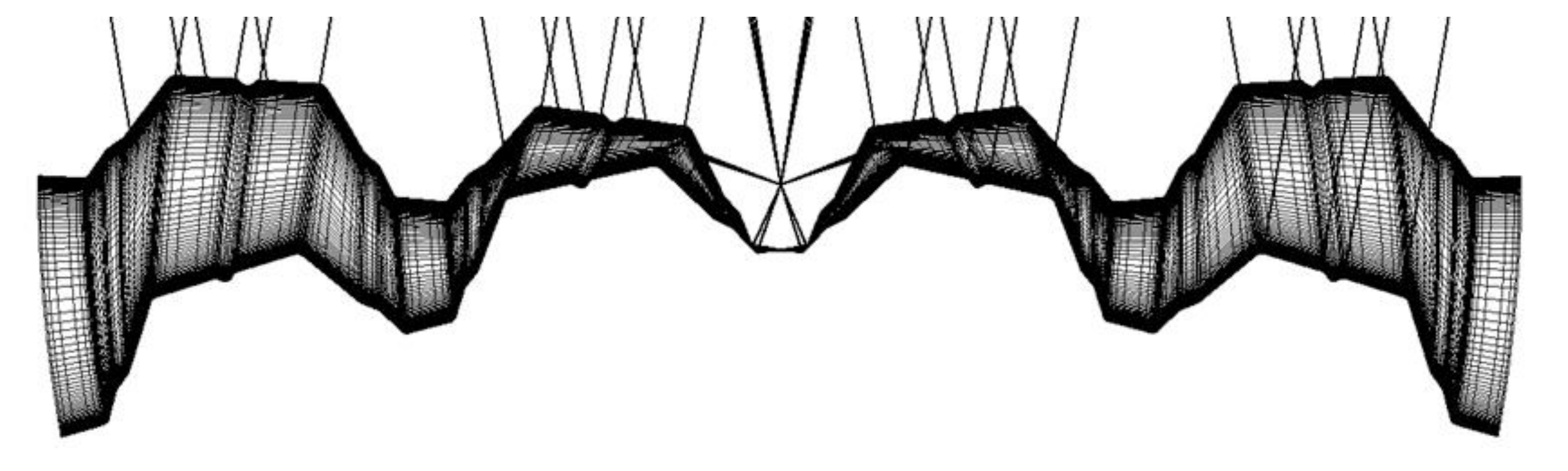
Moreover, the distribution of the above-mentioned stresses in the fold’s flanges and webs shows that each such transformed fold tends to bend its longitudinal edges with the convexity halfway along the length of the longitudinal edges directed to the outside, thereby affecting the adjacent folds in a shell (
Figure 3). The action of the fold has to be balanced by the forces affecting the fold and coming from its neighboring folds. Transformed folds are designed to carry their own weight as well as the characteristic load, so the initial effort resulting from the shape transformations has to be limited appropriately.
These influences of adjacent folds in shells have not yet been researched well enough, and the descriptions presented in the available literature are too general. However, the results of the experimental tests and computer analyses [
1,
10] indicate a large variety of possible unconventional forms of thin-walled folded sheeting transformed from flat to spatial forms, despite these initial stresses. The variety results from the great freedom in the adoption of the shapes and the mutual position of roof directrices, as well as the location of the fold directions in relation to the directions of directrices. The non-perpendicularity of the directions of folds and directrices results in an oblique cutting of both transverse ends of the shell folds [
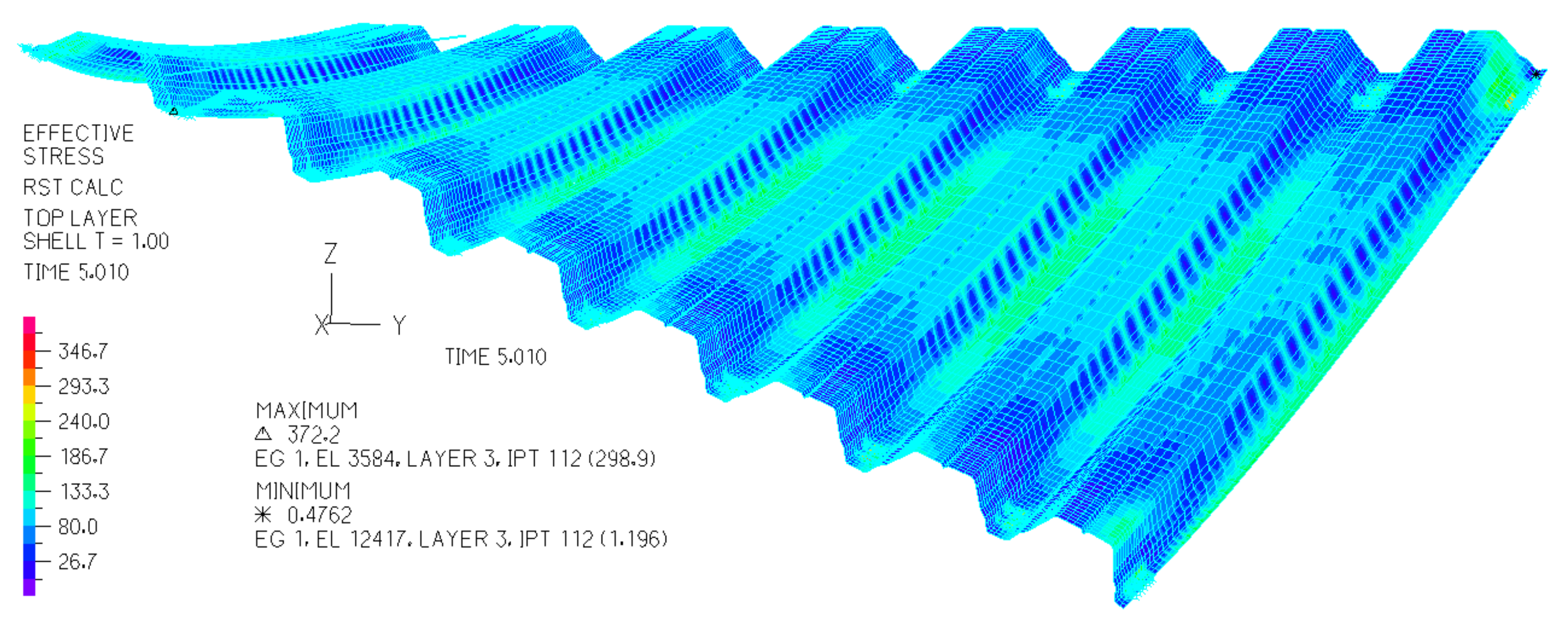
8]. A parametric description of the relationships between these supporting conditions of shell folds and the shapes of these folds allows the use of computer programming technology to create simplified smooth models of these folds and entire shells for engineering developments. The supporting conditions depend on the shapes and mutual position of the roof directrices, and are called boundary conditions. For scientific purposes, that is, for an incremental non-linear dynamic analysis of the static and strength properties of the shell folds as structural elements (
Figure 4) [
10], authors use advanced programs such as ADINA, for example [
11].
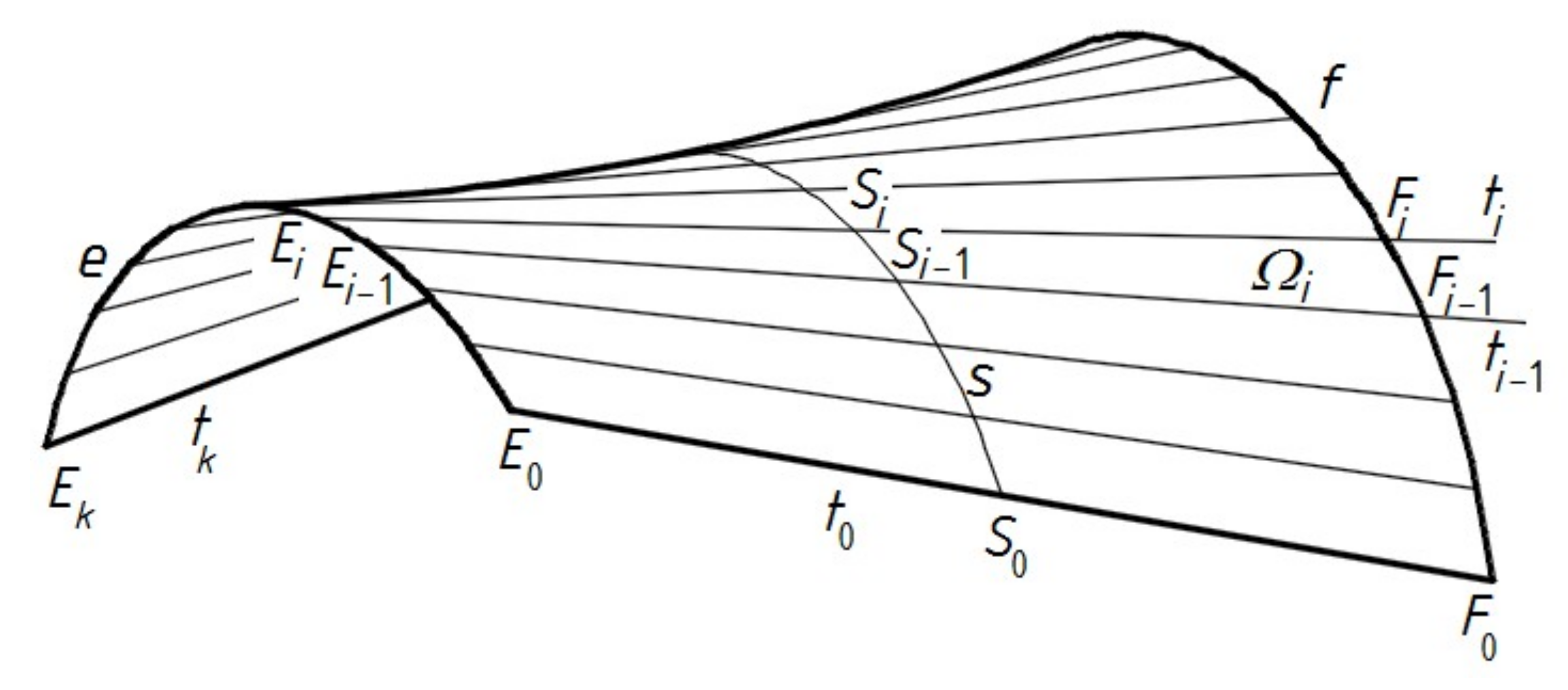
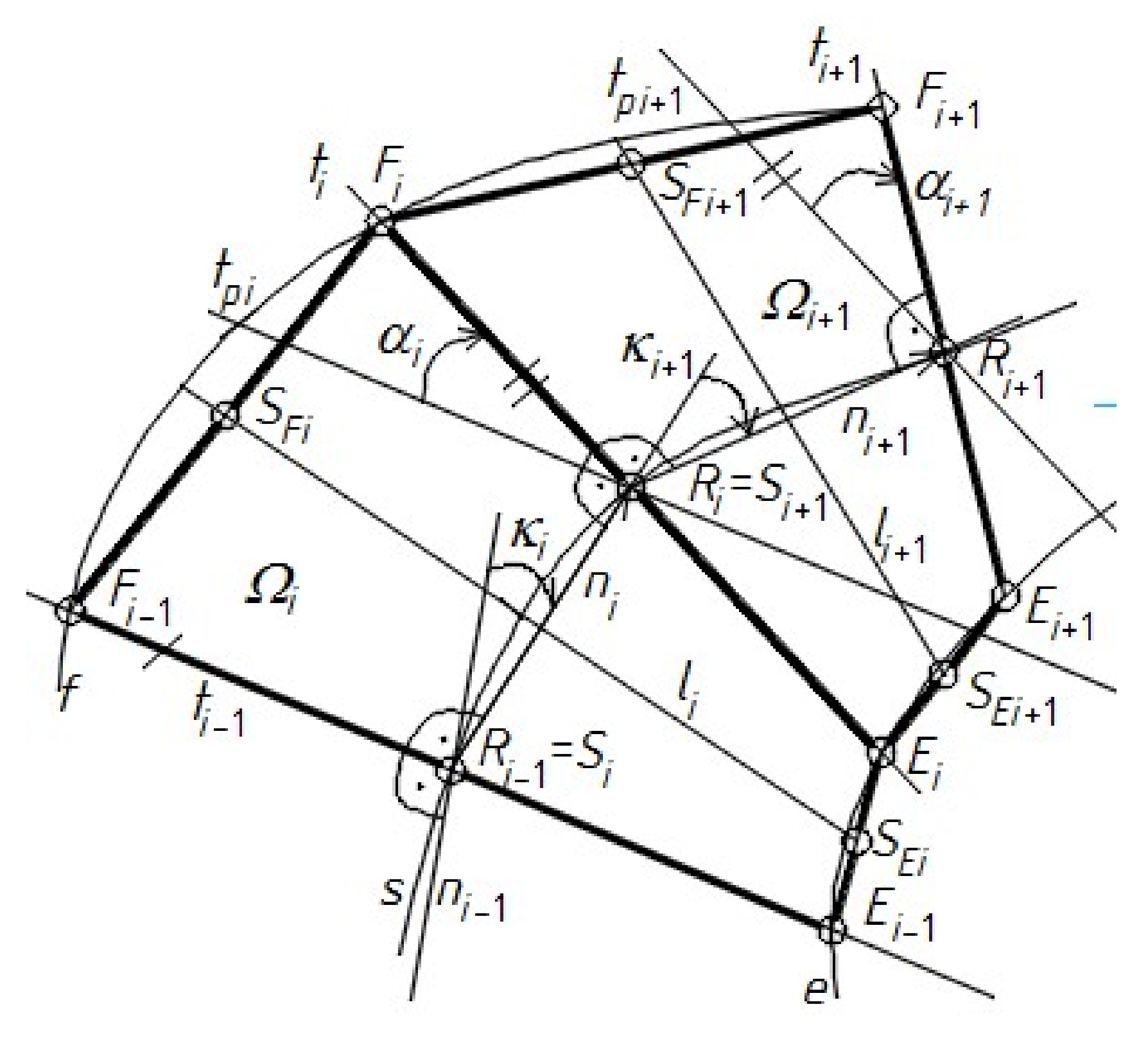
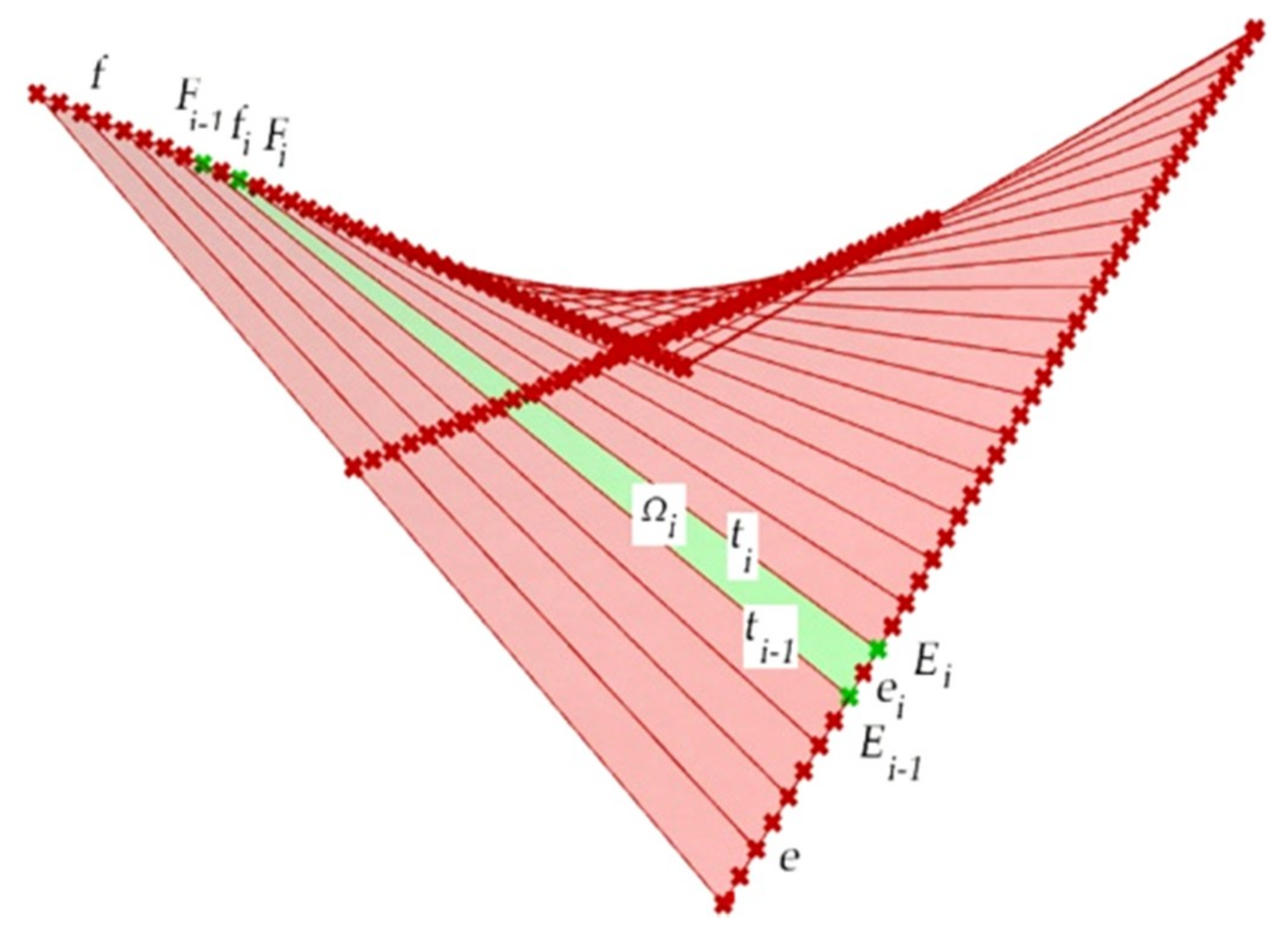
In order to understand the parametric description presented in the present article, some problems should be explained. For engineering developments, regular geometrical surfaces (
Figure 5) are employed to model subsequent shell folds in each transformed shell roof. It is possible to find only one shell shape of a transformed fold, which is assigned to the calculated border conditions resulting from the geometrical supporting conditions in the shell, such that its transformation is effective [
1,
8]. The characteristic of this shape is that its contraction passes halfway along its length transversally to the fold’s longitudinal axes.
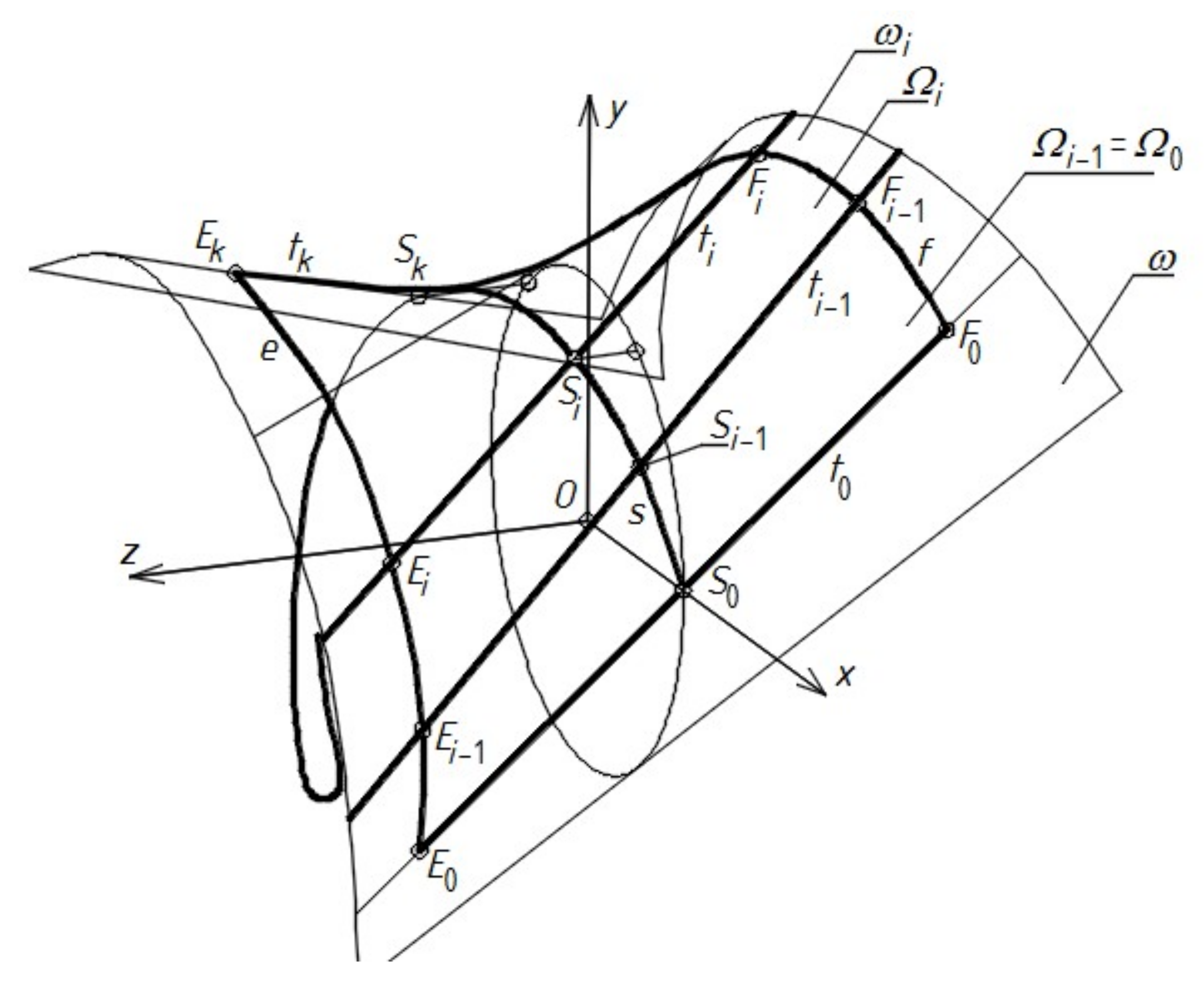
Figure 5 shows the contraction line, which is called the line of striction, and is denoted as
s. As a result, the effectively transformed fold can be spread on the roof directrices relatively freely, that is, with the lowest possible pressing forces. Furthermore, its impact on the forms of adjacent folds in the shell is the least possible. In this way, the effort is optimized to the lowest possible level. The above-mentioned pressing forces are needed to fix the fold’s ends to the roof directrices.
For the effective fold transformations, interdependence between the geometrical supporting conditions and the obtained shell forms of a transformed fold can be used. In these cases, the freedom of the transverse width and height increments of each shell fold forming the transformed sheeting is ensured, and the various attractive and innovative shapes of shell roofs and contraction curves of relatively big curvatures can be achieved (
Figure 6) [
1,
9]. If the fold does not have the freedom of the transverse width increments due to the strong stiffening of its longitudinal edges shared with its adjacent folds, or if the assembly technique causes additional forces varying the effective widths of the fold ends and their supporting lines, the aforementioned interdependence cannot be used
.The application of the well-known conventional design methods [
12,
13], which is known from the traditional courses of theory of structures, in the shaping of transformed shell roof forms is rather ineffective, because it usually results in high values of normal and shear stresses, local buckling, and the distortion of thin-walled flanges and webs of shell folds. It is often impossible to assemble the designed shell sheeting into skew roof directrices because of the plasticity of the fold’s edges between flanges and webs. Reichhart developed various methods for calculating this arrangement and the length of the supporting lines of all the folds in the transformed sheeting [
1]. Abramczyk improved the method [
8,
9] so that the transformation would cause the smallest possible initial stresses of the shell folds.
Therefore, the designer may have to face, and cope with, some problems that arise from using unconventional methods for shaping the general architectural forms of buildings roofed with transformed folded steel sheets, and striving for the relatively simple implementation of the designed innovative forms. The solution of these problems is the priority. The main task is to achieve the geometrical, architectural, and structural cohesion of all the elements of each free-form building, and its shell roof in particular [
14]. This aim is accomplished by creating a parametric description of such building free forms and, in the near future, their specific structural systems [
15,
16] based on the geometrical and mechanical characteristics of the transformed sheeting [
10].
Other difficult issues related to the shape transformation of thin-walled folded shells are the diversified supporting conditions, which are calculated for subsequent folds in the same shell. The diversification results from the mutual skew position of the roof directrices, which results in different twist degrees for the subsequent folds in the shell. Thus, the twist degree is the basic border condition that is calculated for each fold in a roof shell, and affects the shell shape of the fold. The aforementioned interdependence between the supporting conditions and the shape of each shell fold is reduced to the interdependence between its twist angle degree and supporting line length. The lengths of the supporting lines of all the subsequent folds along each directrix have basic significance when searching for the fold’s shell shapes.
An additional complication is caused by none of the directrices in relation to the transformed shell sheeting needing to be symmetrical nor congruent. This means that the sum of the calculated lengths of the supporting lines of all the subsequent shell folds may be different from the length of both employed directrices, so one of the directrices does not have to be completely covered with the sheeting. The differences can reach more than one meter. In this case, changing at least one of the parameters used in the presented description allows the shape and length of one of the directrices to be adjusted to the width of the whole roof shell. Attempts to change the widths of the fold’s transverse ends during their assembly in the shell roof without recalculations are unjustified, because they cause an unnecessary increase in the initial stresses and most often need high forces that can even result in the plasticity of the fold’s flanges and webs. This increase may also be a result of miscalculations related to the optimal fold’s transformed shapes.
For engineering developments, each shell fold can be modeled with a simplified smooth sector of a warped surface [
17,
18]. The sum of all such sectors is a continuous edge structure. On the basis of this structure, one single smooth shell sector approximating this structure and modeling the entire transformed roof shell is created. In this case, the loft function of many graphics computer programs can be used.
2. Critical Analysis
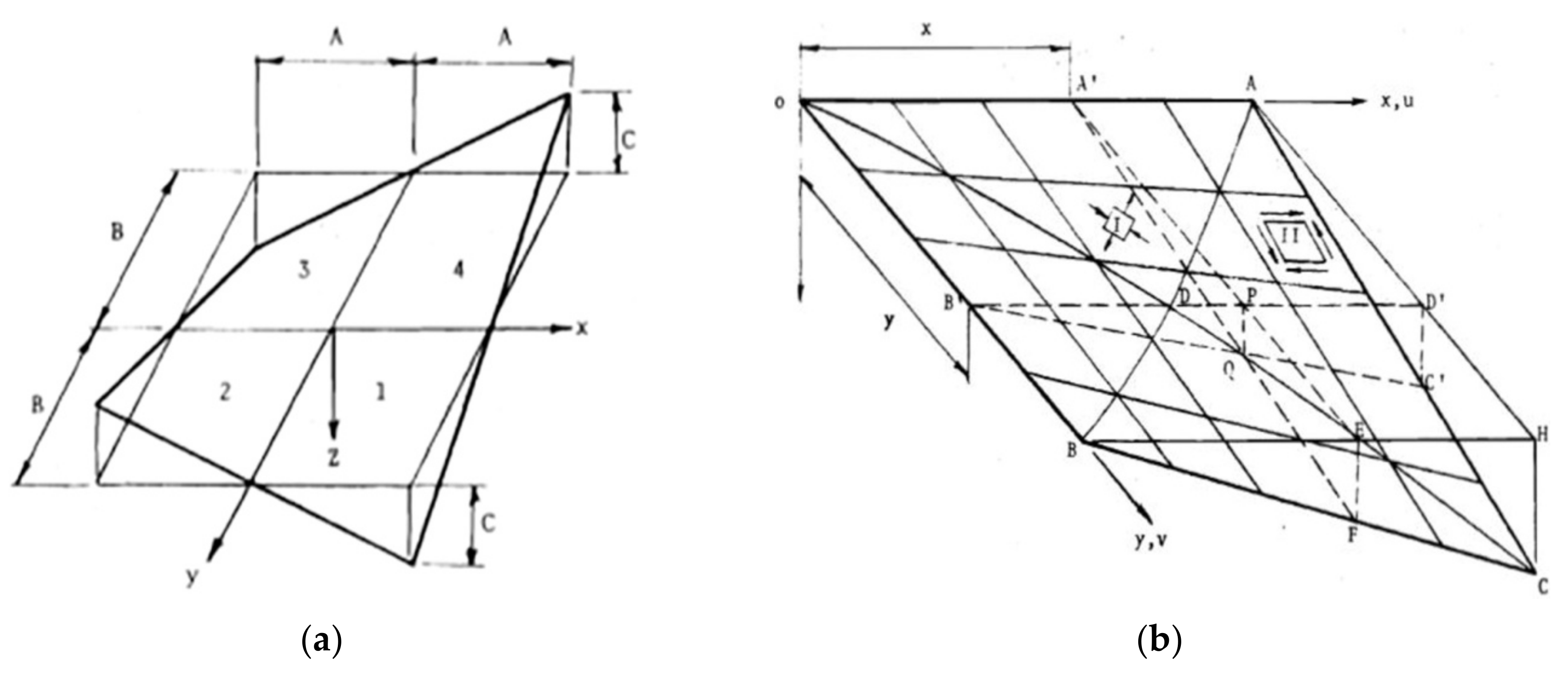
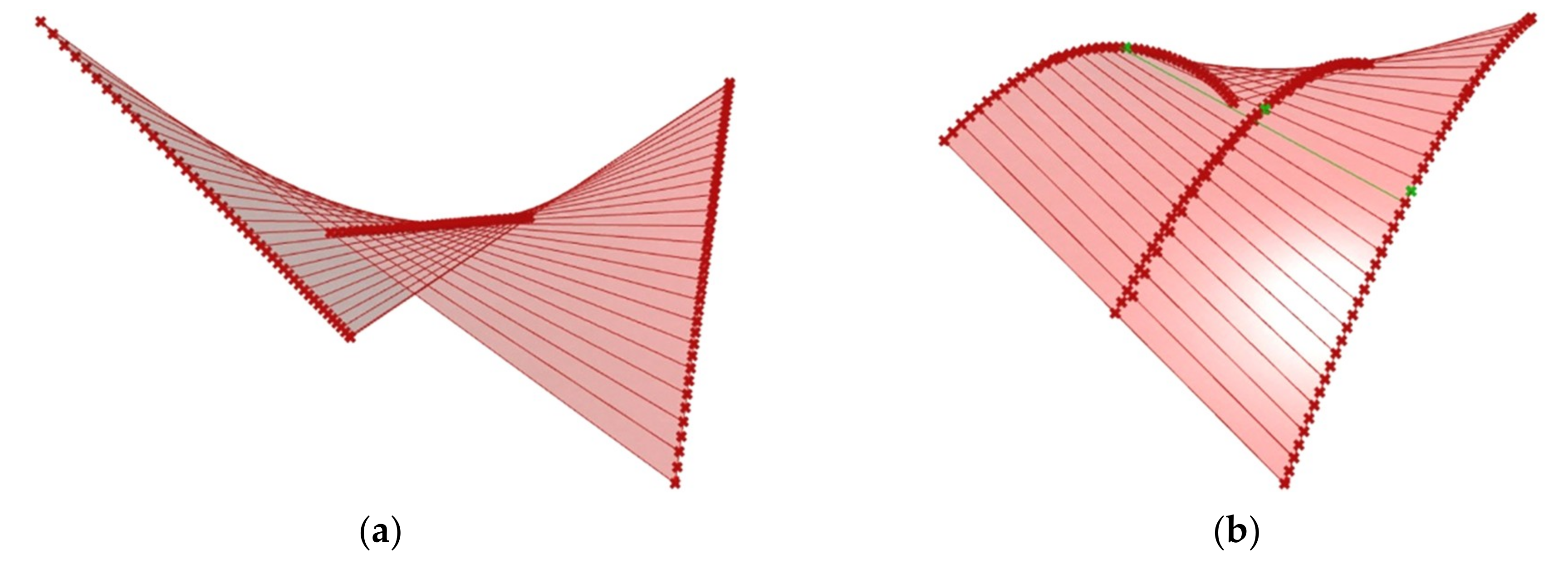
The two straight lines shown in
Figure 7,
x and
y, are two rulings of a specific kind of hyperbolic paraboloids. This type of hyperbolic paraboloids, which is characterized by such lines being perpendicular to each other, is often used to model the transformed corrugated shells, which are called hypars.
Figure 7a shows a simplified, smooth model of a transformed corrugated shell. The shell has quite unique general geometrical properties that are similar to the central sector of the hyperbolic paraboloid symmetric about the
x and
y axes of the Euclidean coordinate system [
x, y, z]. These axes belong to two various families of rulings of the paraboloid, and divide this paraboloid into four congruent units, which are designated as one, two, three, and four. The dimensions of this central sector are represented by the capital letters A, B, and C. These dimensions are the absolute values of the coordinates of four vertices belonging to the edge line of the central section in [
x, y, z].
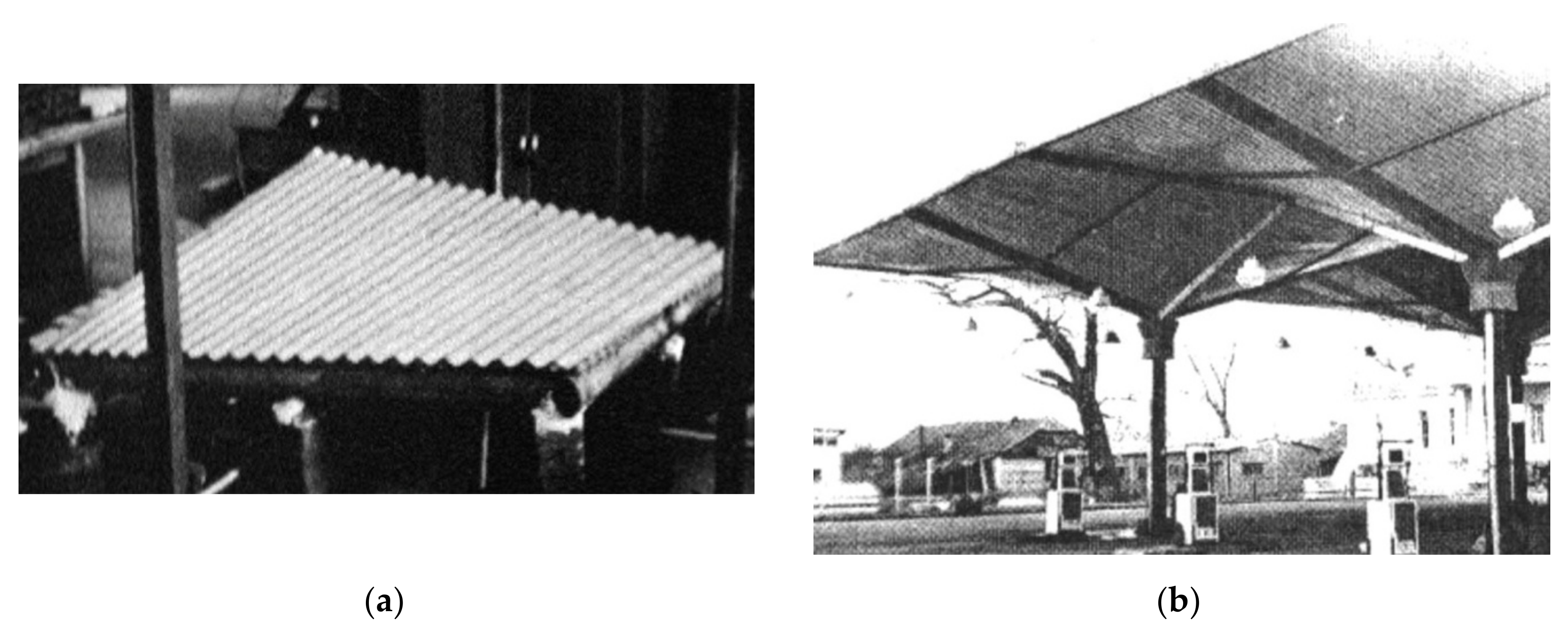
Such surfaces were employed by, for example, McDermott et al. [
13,
19]. Corrugated shell roofs can be shaped as central sectors, or one-fourth of the central sectors of hyperbolic paraboloids (
Figure 7 and
Figure 8). Various configurations of shell structures composed of such sectors were used by Fisher et al. [
20,
21]. The diversity of shell roof forms may be slightly improved by using the computer program developed by Gioncu and Petcu [
22].
The open thin-walled profile and orthotropic properties of the transformed sheeting result in many advantages and disadvantages of the discussed architectural free forms. This makes it necessary for the shell shape of each fold in the shell sheeting to be optimized in relation to the supporting conditions to obtain the lowest possible negative stresses and strains, as well as attractive shell shapes [
8,
12].
Based on his experimental tests [
1], Reichhart developed an innovative simple method for shaping free-form roofs made up of elastically transformed folded sheets. The concept of his method lies in using the geometrical and mechanical properties of nominally plane-folded steel sheets transformed into rational shell roofs [
23]. He employed some basic characteristics of such transformed sheeting observed during his experimental tests. Reichhart’s experimental sheets were supported by straight directrices [
24]. Kiełbasa created a computational folded model of freely twisted sheets using Reichhart’s concept [
25].
Abramczyk found Reichhart’s concept a very rational approach [
8]. However, he has proved that the simplifications made by Reichhart cause very significant errors in roof shell shaping, because they lead to ineffective forced shape transformations and induce unnecessarily high stresses and even plastic deformations of the shell fold’s walls.
Computer programming enables the search for innovative diversified corrugated shell roofs and entire building forms [
16]. Taking advantage of this possibility, Abramczyk developed a method for the intuitive shaping of free-form buildings covered with plane glass elevations and transformed shell steel roofs [
14], and the creation of their simplified models. His method is constantly evolving [
26,
27], used by graduates [
28,
29], and extended to complex free-form structures [
30] (
Figure 9). Some of Abramczyk’s tests and analyses were carried out on his computational folded models [
10] created in a numerical program called Advances in Dynamic Incremental Nonlinear Analyses [
11].
4. Concept
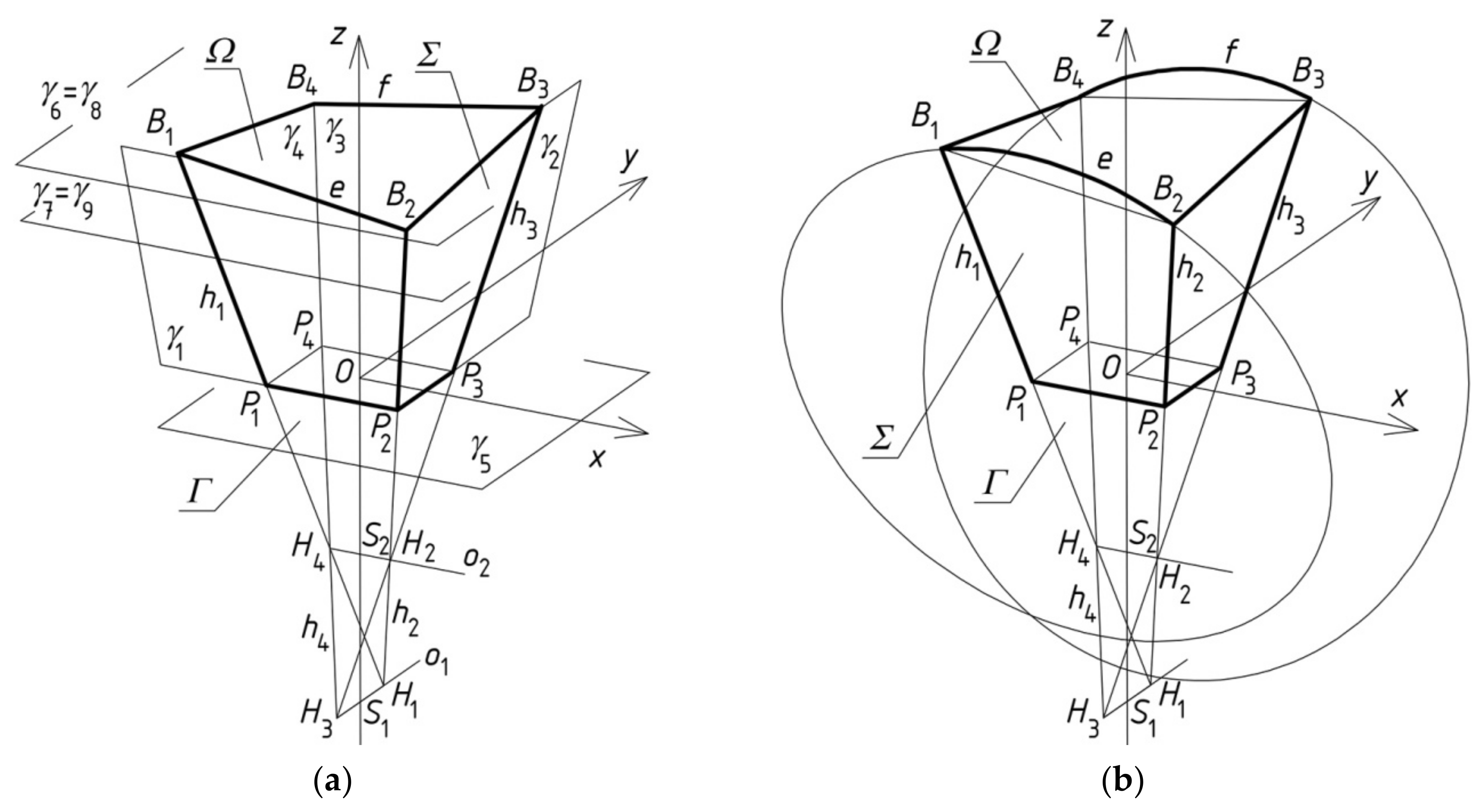
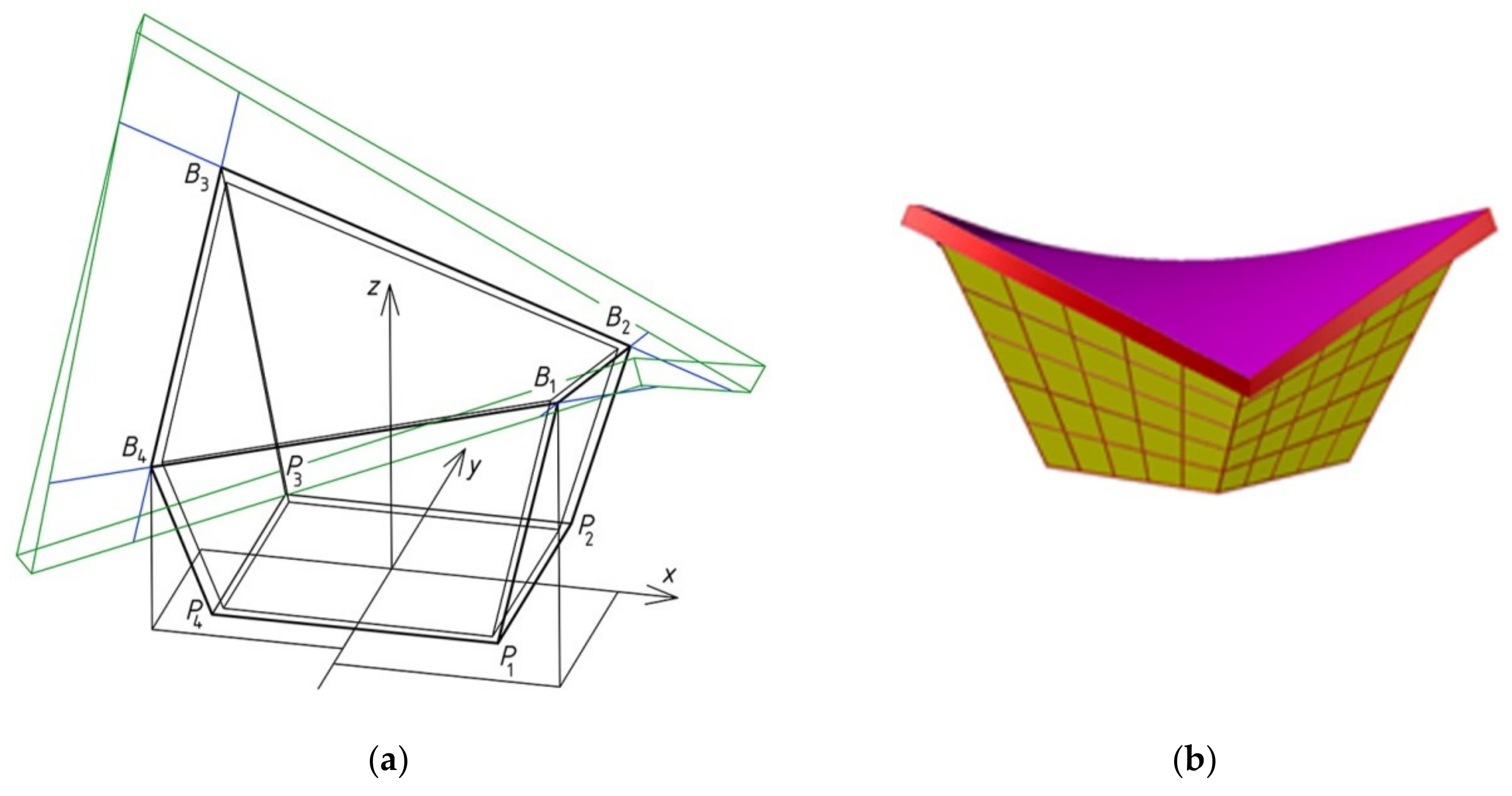
In order to achieve the objectives proposed in the previous section, the following concept of activities is adopted. In the first step, a parametric description of the considered general building forms is used. This step results in a simplified, flat-walled model
Σ consisting of four quadrangles that have vertices at
Pi, Bi (
i = 1 to 4) and represent the four elevation walls of a building (
Figure 10). Both of the
Σ forms shown in
Figure 10 have to be built on the basis of the earlier created reference tetrahedrons Γ, which are defined by the means of four adopted vertices,
Hi. One edge of each of these quadrangles is also a segment of a spatial closed line
B1B2B3B4, which is a model of straight roof eaves. When the roof directrices
e and
f are curved, they are usually adopted in planes
γ1 and
γ3 (or
γ2 and
γ4) of the opposite elevation walls, as shown
Figure 10b. It is often assumed that two sides of line
B1B2B3B4 are the chords of the adopted arcs
e and
f.
In the second step of the algorithm, a parametric description of the smooth shell models of the building’s roofs is used. The accuracy of the models is satisfactory for engineering developments.
In the third step of the algorithm, a parametric description of the basic elements of the building such as flat-walled elevations and shell roofs is used. It includes the thickness of elevation walls and roof shells, the division of each elevation wall into areas creating regular patterns, and the protrusion of roof eaves outside the outline of the elevations.
In the final step of the algorithm, a parametric description of the building structural system dedicated to the folded shell roof and oblique flat-walled glass elevations is used. The description of this step goes beyond the scope of the present paper. It is also possible to extend the method to structures composed of several individual free forms that share walls, such as the ones presented in
Figure 11.
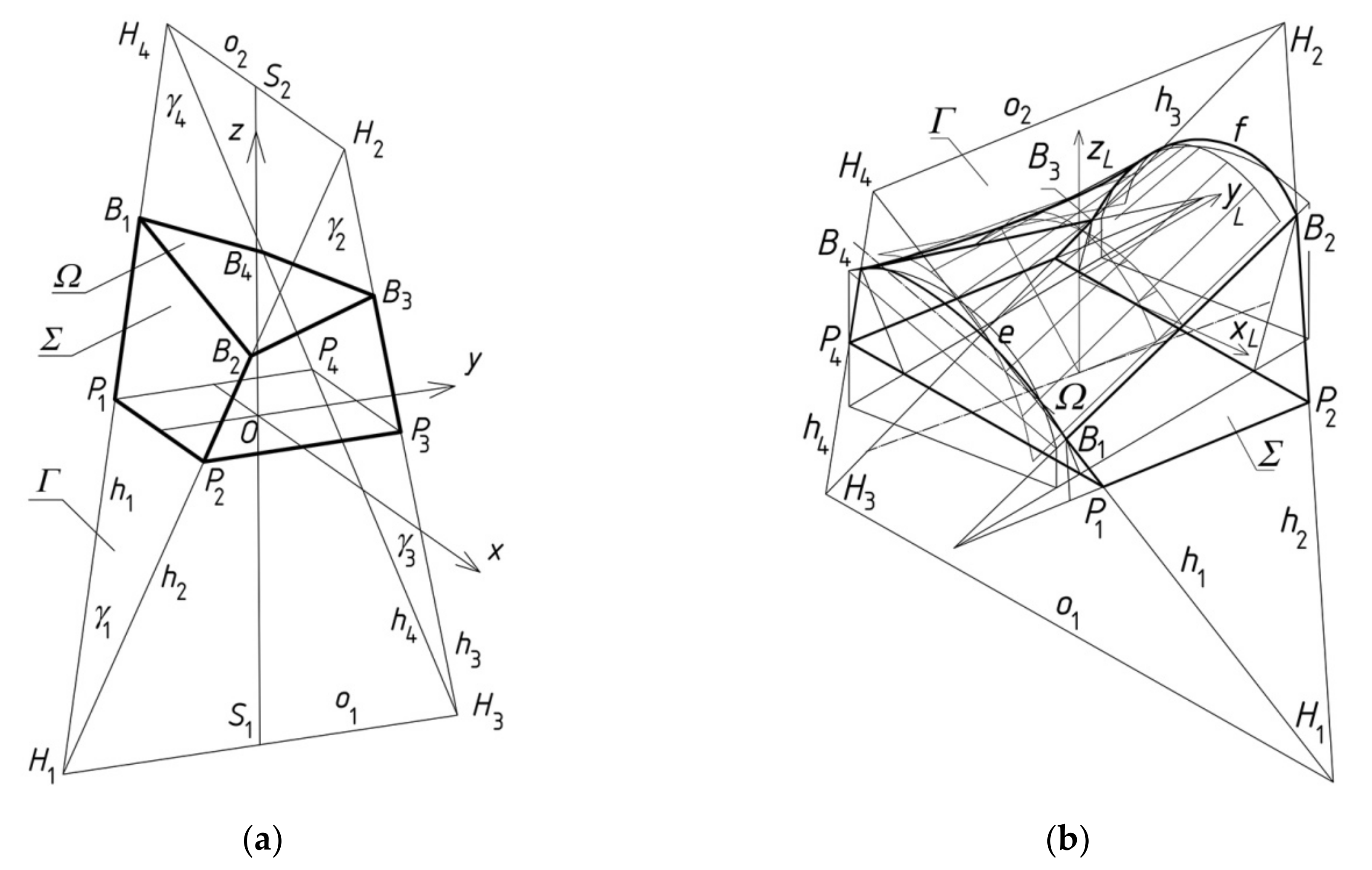
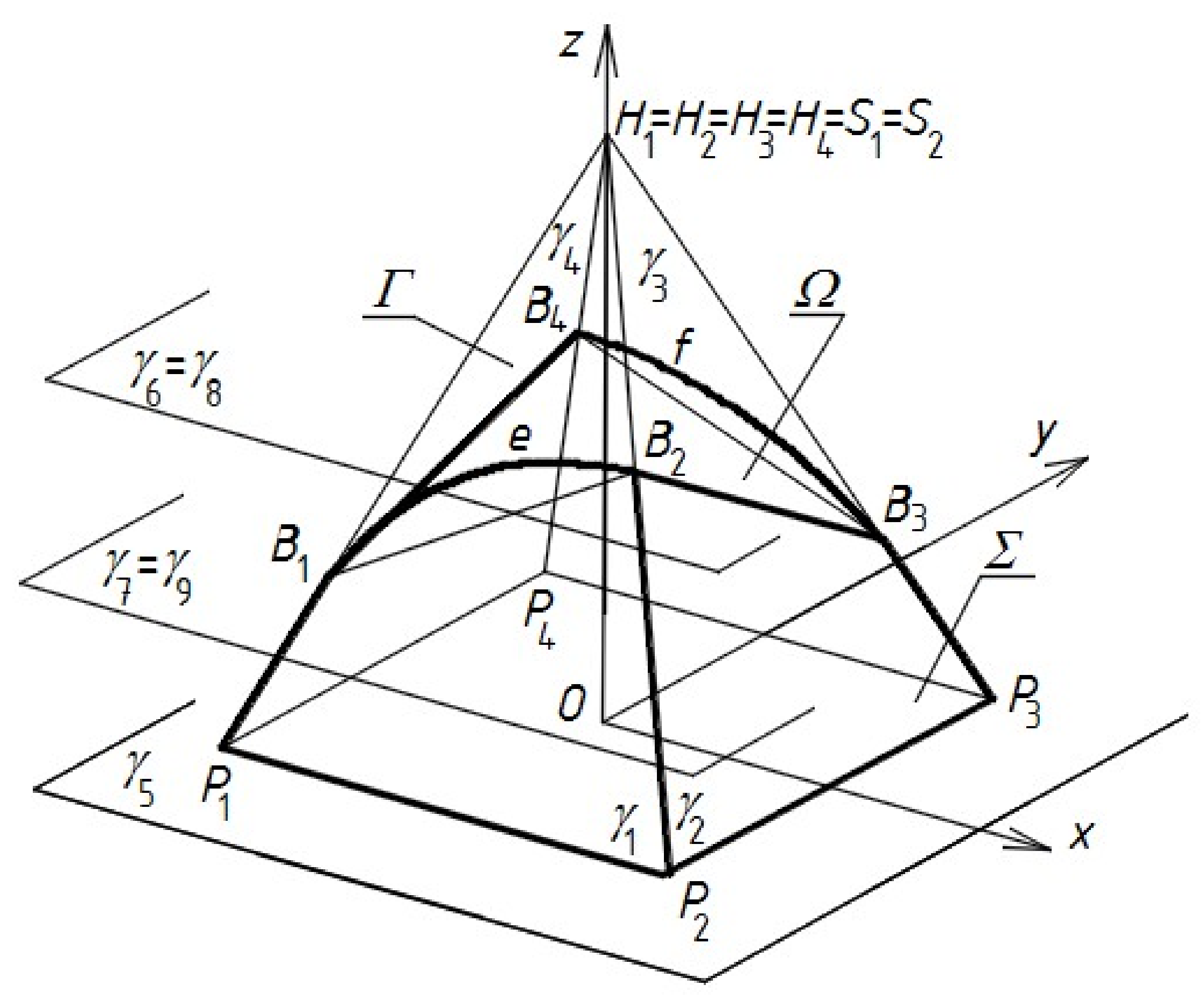
5. Parametric General Building Free Forms
Four flat quadrangles
Σ and one sector
Ω of a warped surface, which are shown in
Figure 12, are the basic objects that are built in this step of the algorithm. They create a simplified model representing the general form of a free-form building. When its roof directrices are two curves, they are the lines limiting two of the aforementioned quadrangles modeling two opposite elevation walls, as shown in
Figure 12b. These forms belong to the second basic kind of the architectural free forms discussed in the paper.
Nine planes
γi (
i = one to nine) are the auxiliary objects in modeling the general building form. The first four planes (for
i = one to four) allow the construction of the aforementioned quadrangles
PiPi−1B
i−1Bi as follows. Each two adjacent quadrangles have a common edge contained in the straight line
hi (
i = one to four), which is the intersection of two adjacent planes
γi−1 and
γi. For example, the
P1P2B2B1 and
P2P3B3B2 quadrangles, which are shown in
Figure 12, have the common edge
P2B2 contained in
h2. These four planes
γi (
i = one to four) define the so-called reference tetrahedron Γ. The plane
γ5 contains the building’s horizontal base
P1P2P3P4. The planes
γj (
j = six to nine) define the levels of the corners
Bi (
i = one to four) of the building eaves. These points belong to
hi, too. The opposite planes
γi and
γi+2 intersect in the axes
o1 or
o2 of Γ. The neighboring edges
hi intersect at the vertices
Hi of the reference figure Γ.
The activities carried out on the aforementioned facilities include:
adopting an orthogonal coordinate system [x, y, z] in three-dimensional space,
accepting any two points S1 and S2 on the axis z,
passing axis o1 || y through point S1,
passing axis o2 || x through point S2,
selecting vertices Hi (i = one to four) on axes o1 and o2,
defining each straight line hi by means of vertices Hi,
obtaining planes γi (i = one to four) defined by the respective pairs of neighboring hi,
creating corners Pi of the rectangular building base as the points of the intersection of plane γ5 with each hi,
determining all the corners of the roof eaves, Bi, as the points of the intersection of planes γj (j = six to nine) with hi, and
defining directrices e and f contained in any two opposite planes γ1 and γ3 or γ2 and γ4.
The following parameters describing the building general forms were adopted in the algorithm:
ptrk (for k = one to six) representing the lengths of the sections: S2O, S1O, S1H1, S1H3, S2H2, and S2H4,
ptrr (for r = seven to 10) representing the distances of planes γj (j = six to nine) from plane γ5(x, y) of the building base,
ptr10 representing the same ridges of roof directrices e and f, which are usually shaped in the form of circle arcs.
It is assumed that the architectural form example belonging to the last—that is, third—basic type (
Figure 13), which is discussed below, will be determined on the basis of the parametric description proposed above. The values of the parameters adopted for shaping the sought architectural form are given in
Table 1. From the engineering point of view, what is more important is the coherence of the parametric description of architectural forms and the obtained set of proportions between the parameters, rather than the individual values of these parameters. In order to present these proportions, it is assumed that the reference parameter is the width
ptr13 of the general form along its base. The values of the proportions that are considered important and shown in
Table 2 refer to this reference parameter.
In order to explain the attractiveness of a general form
Σ, it is necessary to define additional parameters describing, for example, the width and height of the created architectural form, its roof and façade, the slopes of the roof eaves, edges, and the planes of façade walls. Such an action requires extensive considerations, and does not fall within the scope of the article. These issues are initially discussed in [
13], and are related to a specific method, which is not presented in this article.
It is possible to create other sets of parameters defining the general building forms, as in the examples proposed by Abramczyk in [
8,
26]. However, his method is significantly more complex and requires a good spatial reasoning from the designer.
8. Example of Shaping Architectural Free Forms
This section presents the geometrical properties of the transformed roof shell roofing for the architectural form that is sought after in this work, the general form of which has been defined using the parameters given in
Table 1 in
Section 5, and is illustrated in
Figure 13.
The shell roof is characterized by non-zero thickness, which is expressed by means of parameter
ptr14 = 720 mm, and the overhang of the eaves outside the outline of the façade, which is expressed by the parameter
ptr15 = 500 mm (
Figure 27). The coordinates of its characteristic points and the general form of the entire discussed architectural form are given in
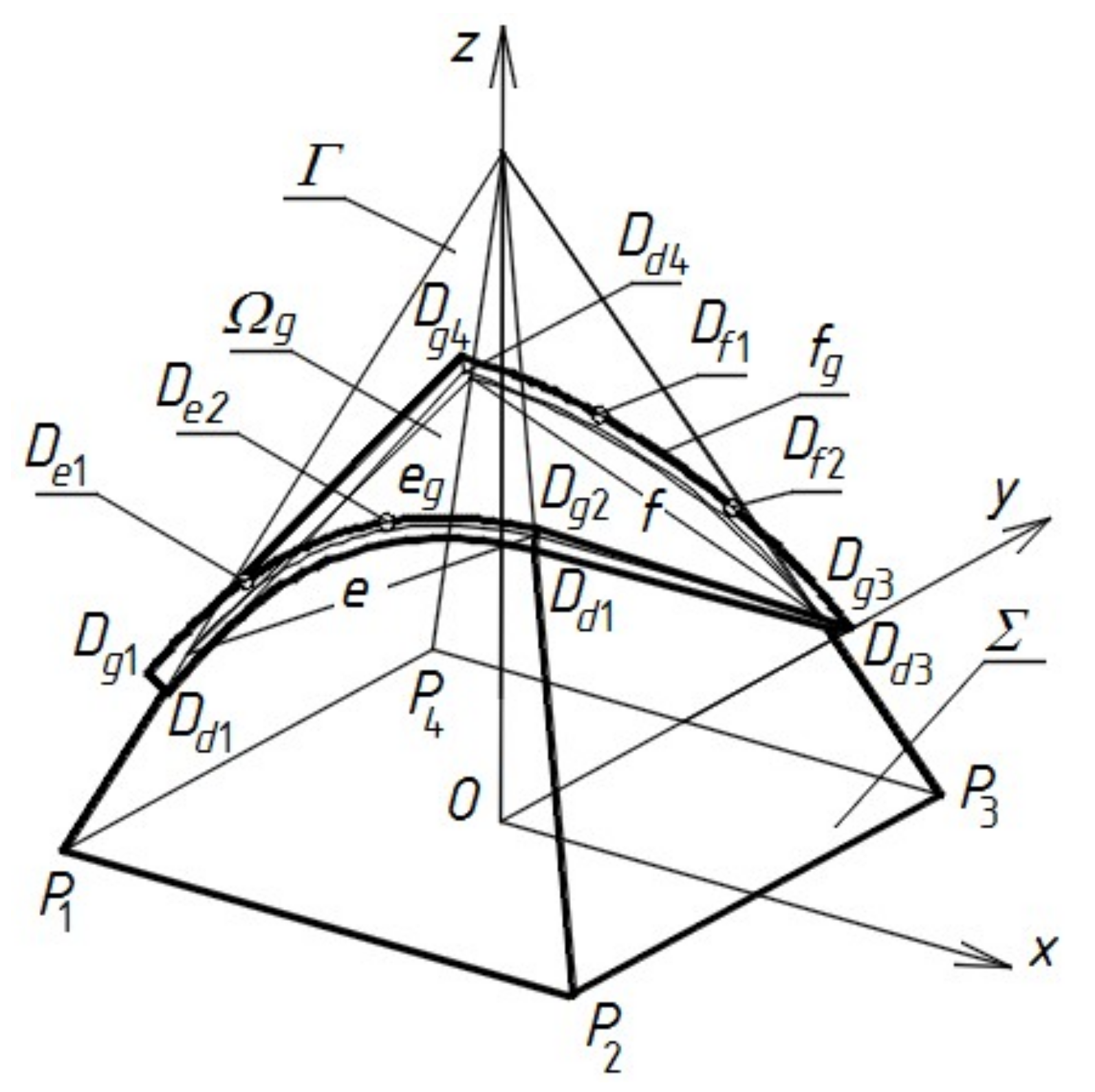
Table 3. Points
De1,
De2,
Df1, and
Df2 are additionally selected on the
eg and
fg directrices of the upper roof shell surface
Ωg, and their coordinates are entered with the coordinates of points
Dg1,
Dg2,
Dg3, and
Dg4 as input defining the directrices used in the application of the Rhino/Grasshopper program, which was discussed in
Section 6. These values were adopted as the suggested values of the sliders that are presented in
Figure 19.
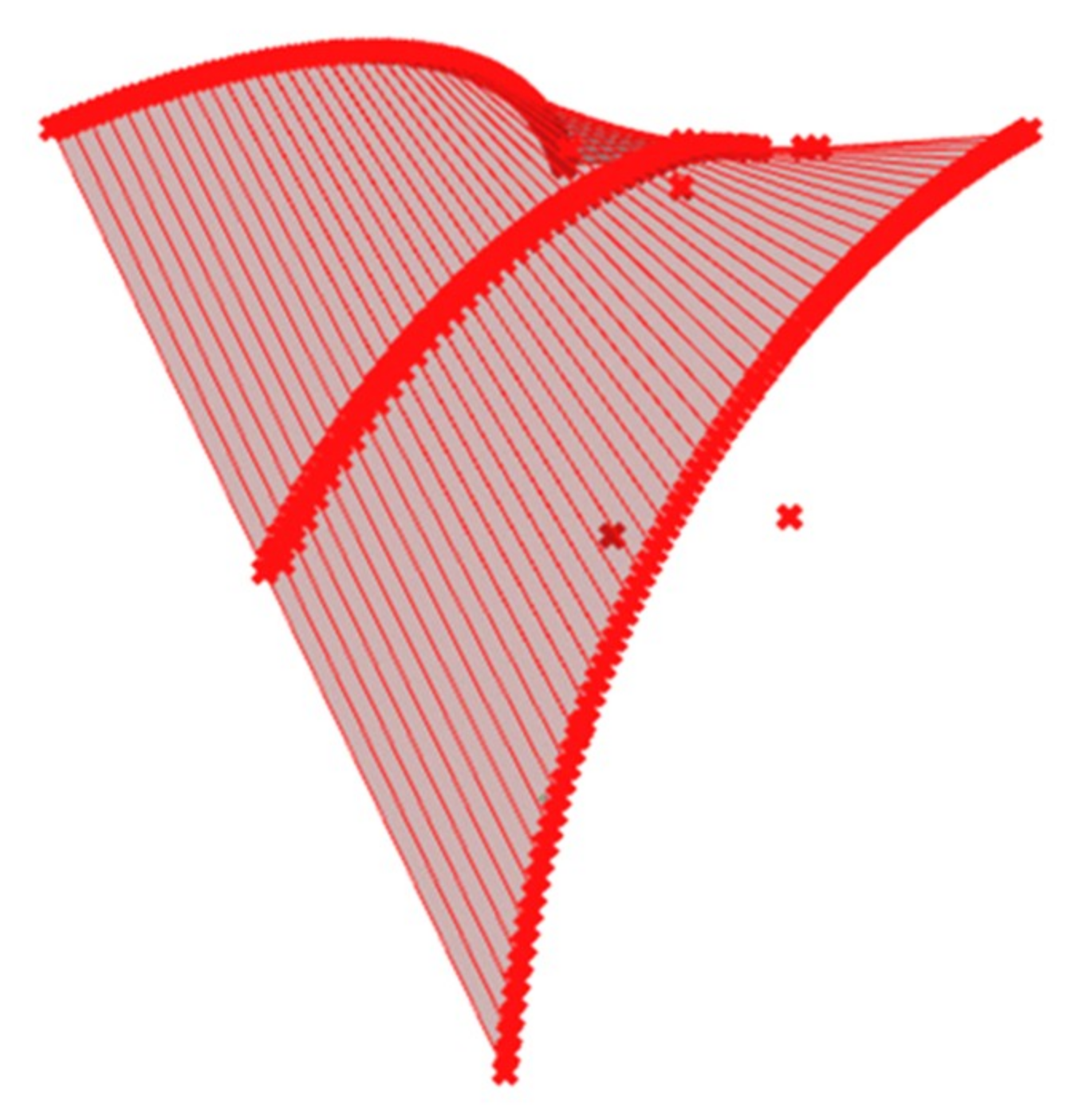
The discussed roof shell is limited from the top and bottom by two oblique surfaces, the upper one of which is the sought-after model of the transformed folded shell sheeting. This model (
Figure 28) was determined using the innovative application built by one of the authors in the Rhino/Grasshopper program.
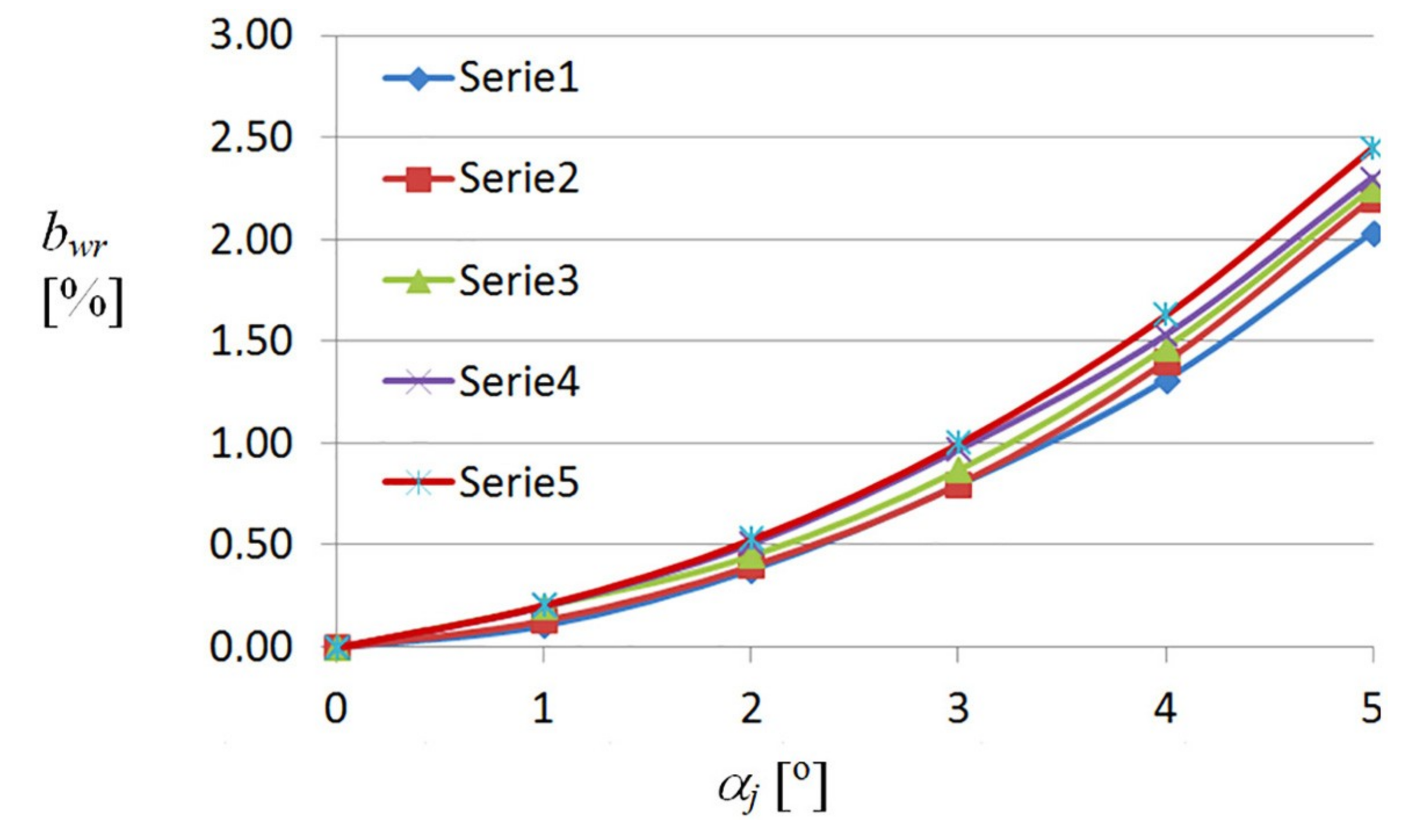
The calculated values of the unit twist angle
αj defining the supporting conditions, and geometrical properties of the subsequent folds in the discussed shell roof, are tabulated in
Table 4.
The final architectural free form that is sought is presented in
Figure 29. The parameter
ptr16, which is defining the position of the subsequent horizontal lines in the regular elevation pattern, is 3000 mm. The parameter
ptr17, which is defining the position of the vertical lines of the regular elevation pattern, is four, because of four vertical elevation glass strips.
The free-form buildings under consideration are visually attractive owing to the suitable shell shapes of roofs coherent with the oblique elevations. It is also noticeable how the color and regularity of elevation pattern affect the attractiveness and harmonious incorporation of the parametric free-form buildings into the built environment. Abramczyk presented a way of adopting fine proportions between the parameters, leading to attractive building free forms [
14]. The proposed method requires the designer to possess a certain predisposition to logical and spatial reasoning in the field of shaping free forms, as well as their texture, color, light, and shadow. Obtaining the required effect is conditioned by the individual artistic predispositions of the designer. The method assists the designers in managing their ambitious artistic goals.
9. Conclusions
The novel parametric description of the unconventional building free forms roofed with nominally plane-folded steel sheets transformed into shell sheeting is presented. The algorithm of the innovative method proposed for shaping the aforementioned forms with transformed corrugated shell roofs is based on the description. The method must be supported by the authors’ application, which was created in the Rhino/Grasshopper program useful in parametric design
The proposed parametric description and the algorithm based on the description are related to the multidimensional aspects of the architectural free-form design. The use of the above parametric description is presented in detail regarding the example of shaping one relatively simple architectural free form with a transformed shell roof. The visualization of this form, which is shown in the last figure, is the effect of using the above description as well as the computer-aided method based on this description.
The article presents three basic types of the discussed architectural forms. Their general forms have diversified shapes, where their widths change at the height from the building base to the eaves in various ways. One of the presented forms expands along the height of the oblique façade walls from the base to the eaves (
Figure 12), while the other contracts (
Figure 13). In the third type of the presented forms (
Figure 10), the width of the whole shaped building measured between the two opposite façade walls increases, while the width between the other pair of the opposite façade walls decreases in the vertical direction from the base to the eaves. The possibility of determining the various types of architectural forms, in which the elevation edges and planes are inclined to the vertical to various degrees, and roof surface rulings and eaves edges are inclined to the horizontal base plane, is clearly demonstrated. This proves the sensitivity of the proposed method to the harmonization of these forms with the built environments.
The intended effect consisting of creating an attractive unconventional architectural form should be achieved not so much by adopting the values of the proposed parameters, as much as by adopting the proportion between these values and one basic parameter, which is called the reference one. In the case of the chosen architectural form, the reference parameter is ptr13 = 20,000 mm, which describes the width of the architectural form. The adopted ratios are ptr1/ptr13 = ptr2/ptr13 = 1.17, ptri/ptr13 for i = three to six, ptrj/ptr13 = 0.64 for j = seven to 10, ptr11/ptr13 = 0.090, ptr12/ptr13 = 0.036, ptr14/ptr13 = 0.036, ptr15/ptr13 = 0.025, and ptr16/ptr13 = 0.15. The adopted proportions and values make it possible to define the roof and elevation lines, including roof directrices. On the basis of the shape and mutual position of the directrices, the supporting conditions are calculated, and followed by the smooth shell models of the subsequent folds of the roof shell.
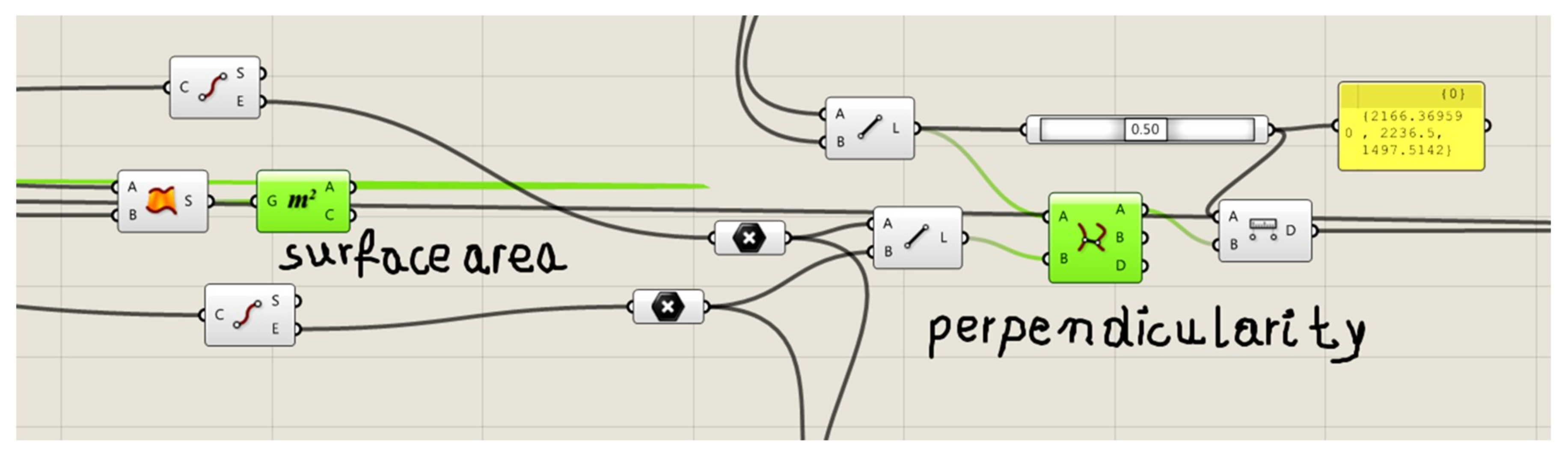
The authors’ computer application supports these calculations. The application contains two basic conditions determining whether the created simplified smooth models guarantee the effectiveness of the fold’s transformations during the assembly of these folds into the calculated places arranged along roof directrices. The first condition concerns the equality of the surface areas of a smooth model of a fold before and after its transformation. The experimental tests and computer analyses have shown that for folds of different profiles, and therefore of different lateral stiffness, the above areas differ relatively little compared with the accuracy of shell modeling. Further detailed experimental tests in this field are necessary in order to develop a function correcting the surface area of each fold after transformation, depending on its lateral stiffness. The second condition concerns the location of the fold’s contraction along its length, and has to be rigorously observed, because even a relatively small change in the position of this contraction in relation to the length of the fold results in a significant change in the proportion between the lengths of both its supporting lines e and f, and this significantly affects the transverse stresses, which is decisive for the value of the fold’s initial effort.
As the thickness of each shell roof should be conspicuous, that is, significant in relation to the height of the building, both its upper and lower surfaces can be made up of the transformed corrugated sheeting. Both should usually be determined by means of the method, despite really small differences in the curvature of these surfaces. This results from even small differences in the supporting conditions of the folds of both shell sheetings inducing additional changes in the supporting line length. After the lengths of these changed lines have been added up, major differences arise in both the length of the supporting line of the entire roof shell, as well as in the spacing of the fixing points of these folds along the roof directrices. Additionally, it should be taken into account that these folds are usually supported by additional intermediate directrices at their length.
The architectural form of any designed building should be internally consistent; this means that the shape, position, and orientation of its characteristic straight and curved edges, as well as the flat and curved surfaces of the roof and façade, must be integrated. This integration must be taken into account both at the step of general form specification and when shaping the façade pattern. For this purpose, the proposed description includes parameters that define the regular form of the elevation pattern. In the case of the architectural form selected for discussion, a simple, equal division of each façade wall into horizontal and vertical glass strips separated by lines obtained by dividing each of its four edges into sections of equal length has been used. As the authors’ analysis of the division of glass elevation planes into uneven strips or pattern diagonal orientation—which affects the integrity of the architectural form and its sensitivity to the built environment—is not complete yet, its results are not presented in the article.
The authors intend to continue and extend their research to the following areas: (1) the parametric description of free forms of complete buildings and their structures roofed with transformed corrugated shells; (2) the search for rational structural systems dedicated to the buildings under consideration here; and (3) the development of numerical models calibrated on the basis of their experimental research and exhibiting the geometrical and mechanical properties of elastically transformed thin-walled folded shells.
In the first case, the authors propose to analyze the possibilities of joining a few individual free forms of all three previously described types into a single structure with folded or segmented elevations and roof, which can be even more sensitive to the built environments than some complete forms. In the second case, due to the oblique orientation of the edges and surfaces of the façade and roof, it is necessary to adjust the shape of the structural system not only to the shape of the architectural form and its elements, but also to the character and direction of the characteristic load. Building construction has to guarantee an appropriate stiffness of architectural form, especially along the oblique edges of the roof and façade. The authors intend to conduct the analyses of various single-branch and multi-branch forms of structural elements such as poles and roof girders, depending on the architectural form dimensions and the roof span.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}