
Research on Denoising of Bridge Dynamic Load Signal Based on Hippopotamus Optimization Algorithm–Variational Mode Decomposition–Singular Spectrum Analysis Method
Abstract
1. Introduction
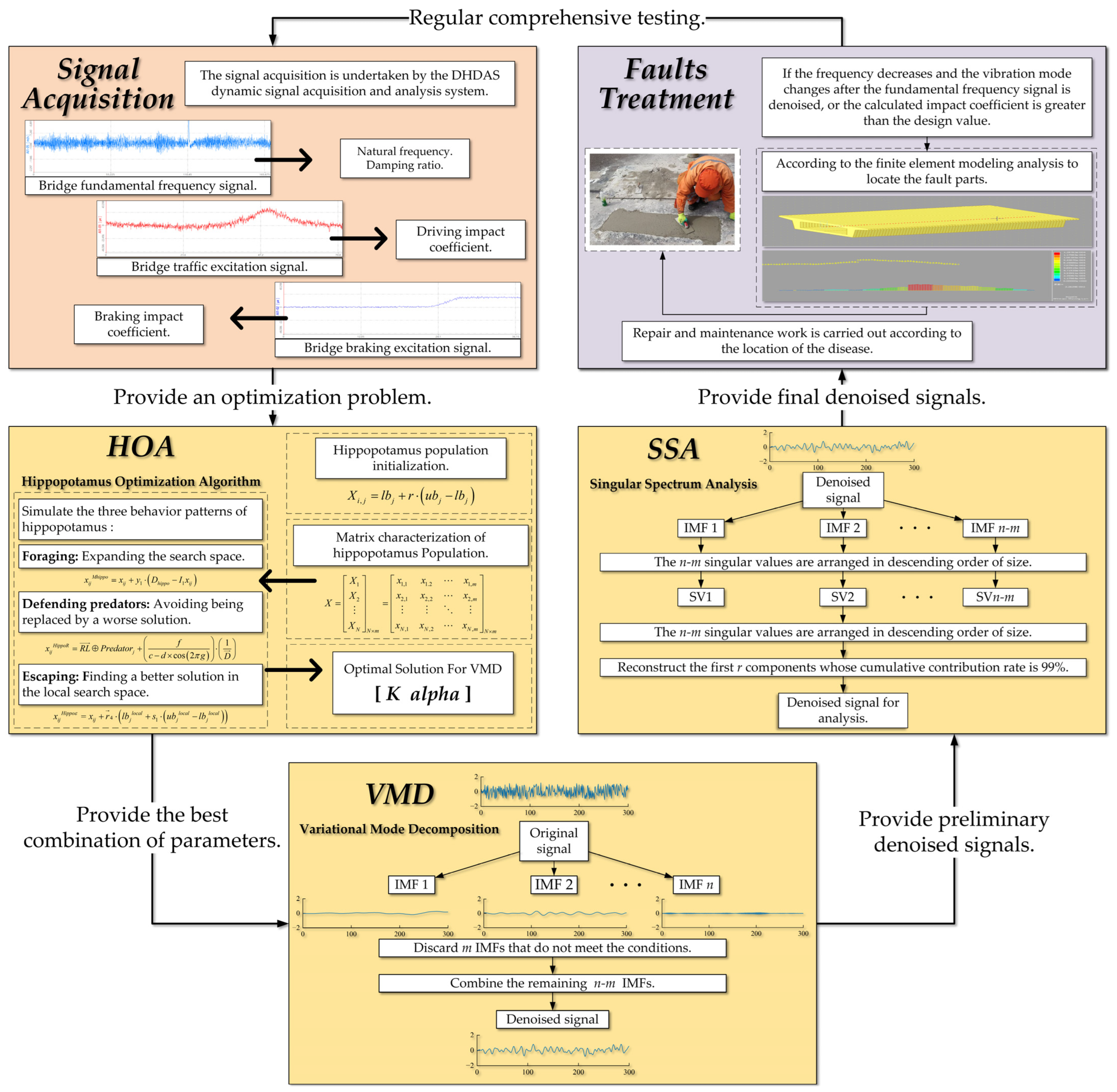
2. System Framework
3. Methodology
3.1. Variational Mode Decomposition
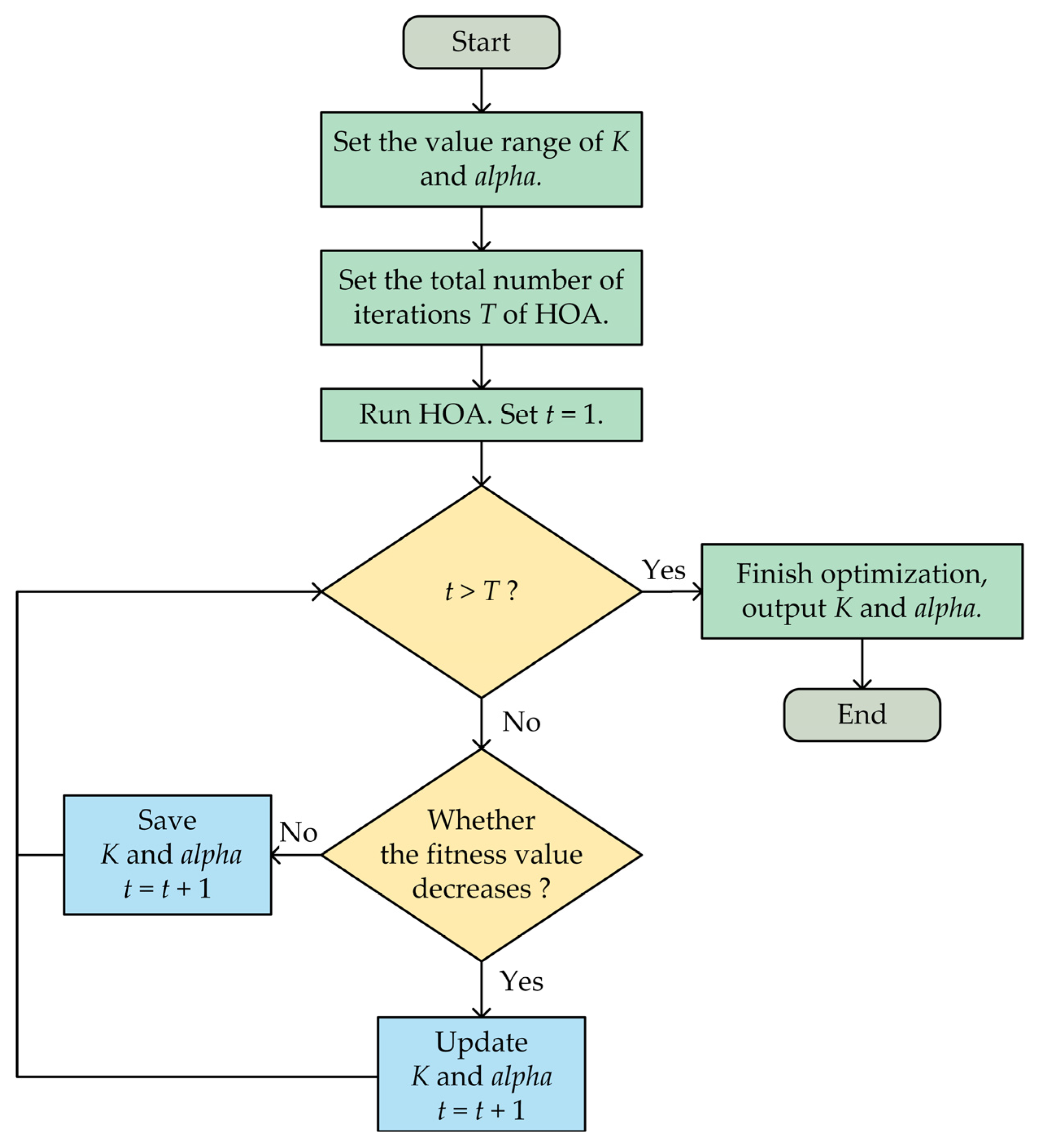
3.2. Hippopotamus Optimization Algorithm
- Phase 1: Renewal of the hippopotamus’ position in a river or pond (Exploration)
- Phase 2: Hippopotamus defense against predators (Exploration)
- Phase 3: Hippopotamus escapes from predators (Exploitation)
| Algorithm 1: Pseudo-code of HOA. |
| Input: The maximum number of iterations (T), number of hippopotamuses (N), fitness function, bounds of variables function, bounds of variables decision, and signals. |
| Output: Fitness, parameter combinations [K, alpha]. |
 |
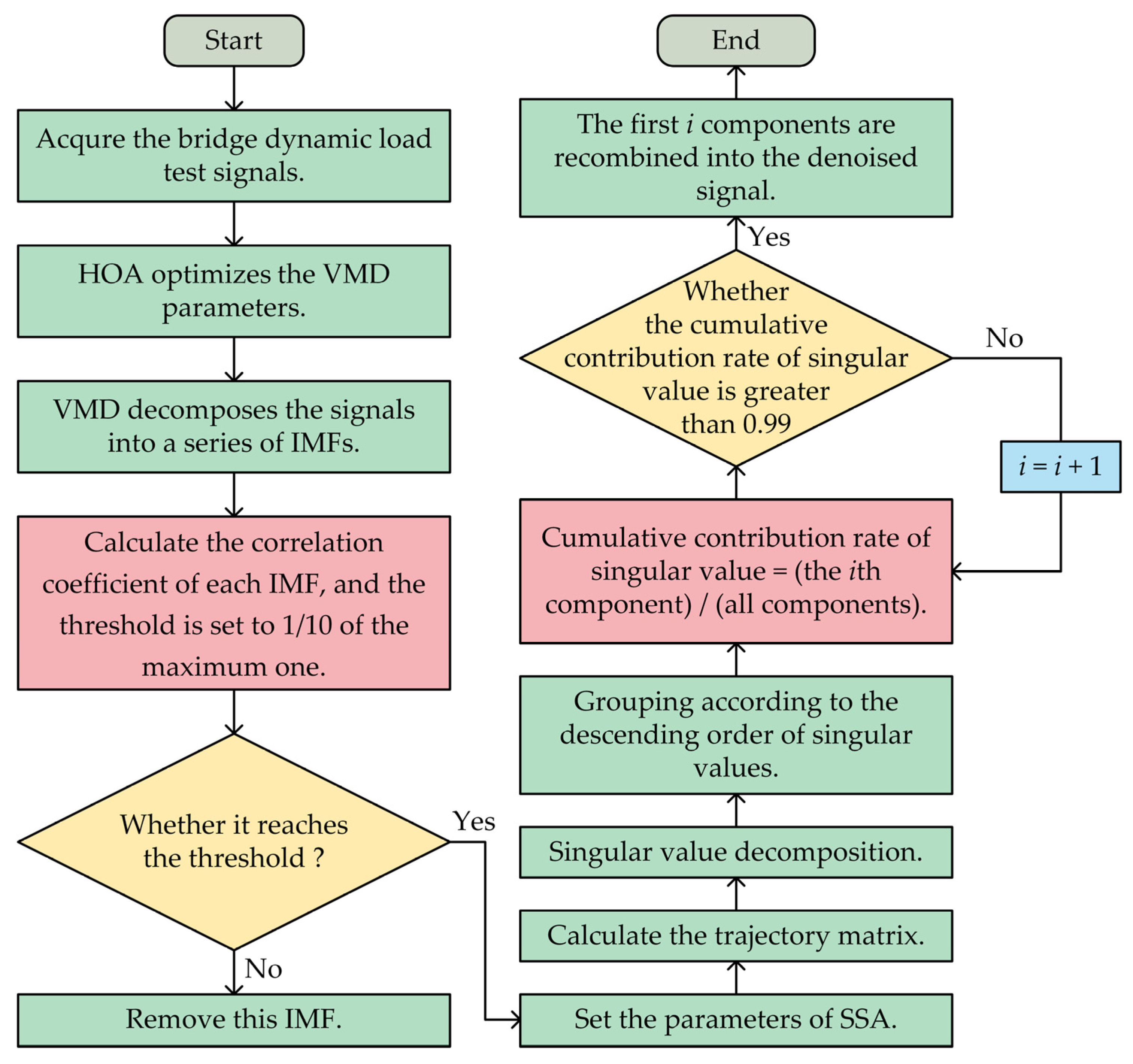
3.3. Singular Spectrum Analysis
- Stage 1: Decomposition
- Stage 2: Recombination
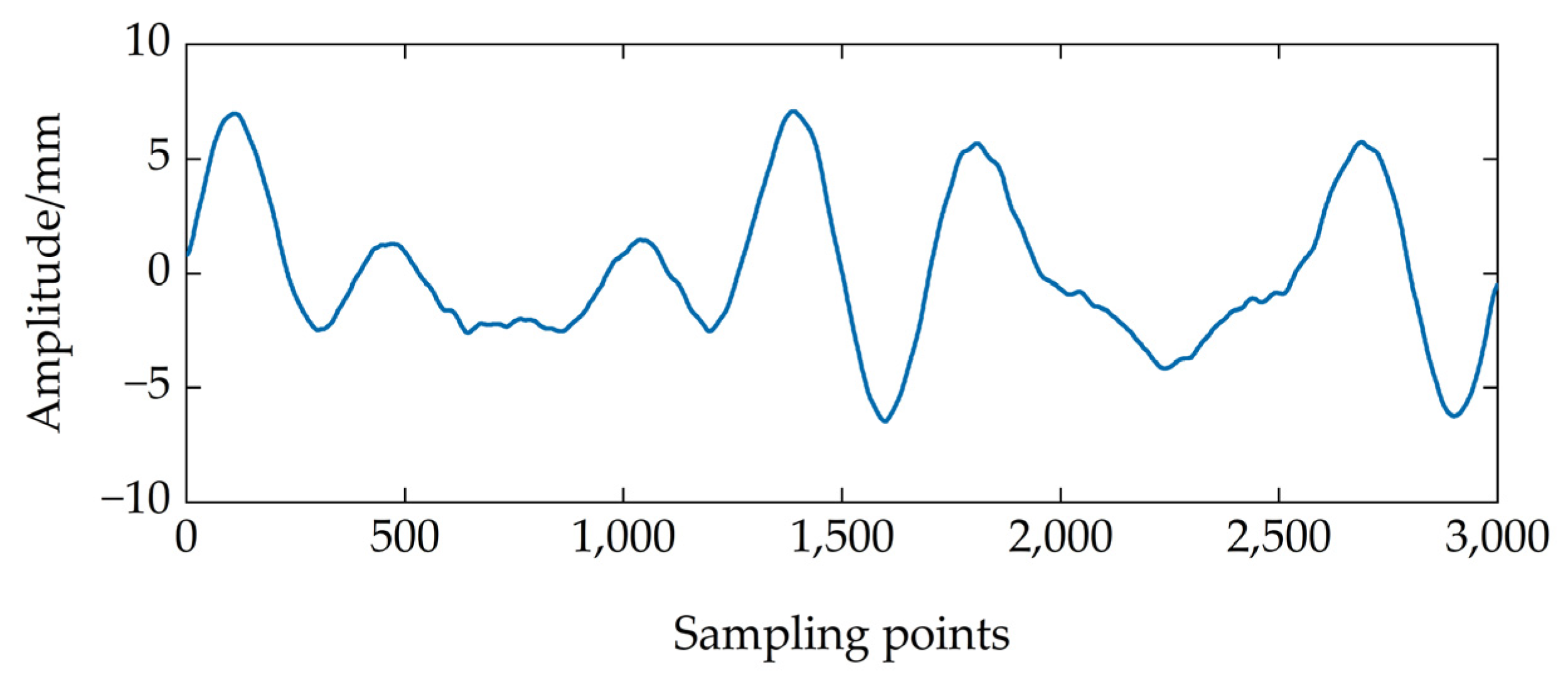
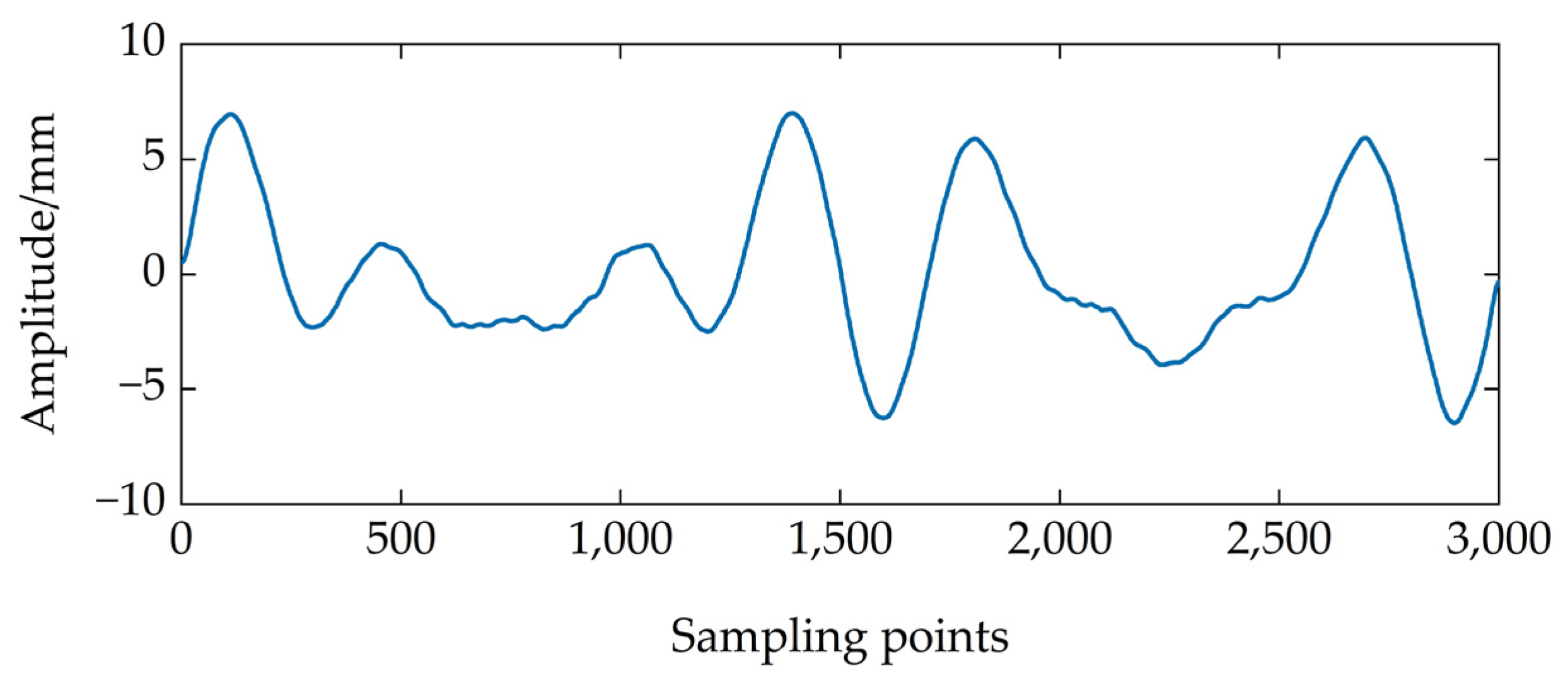
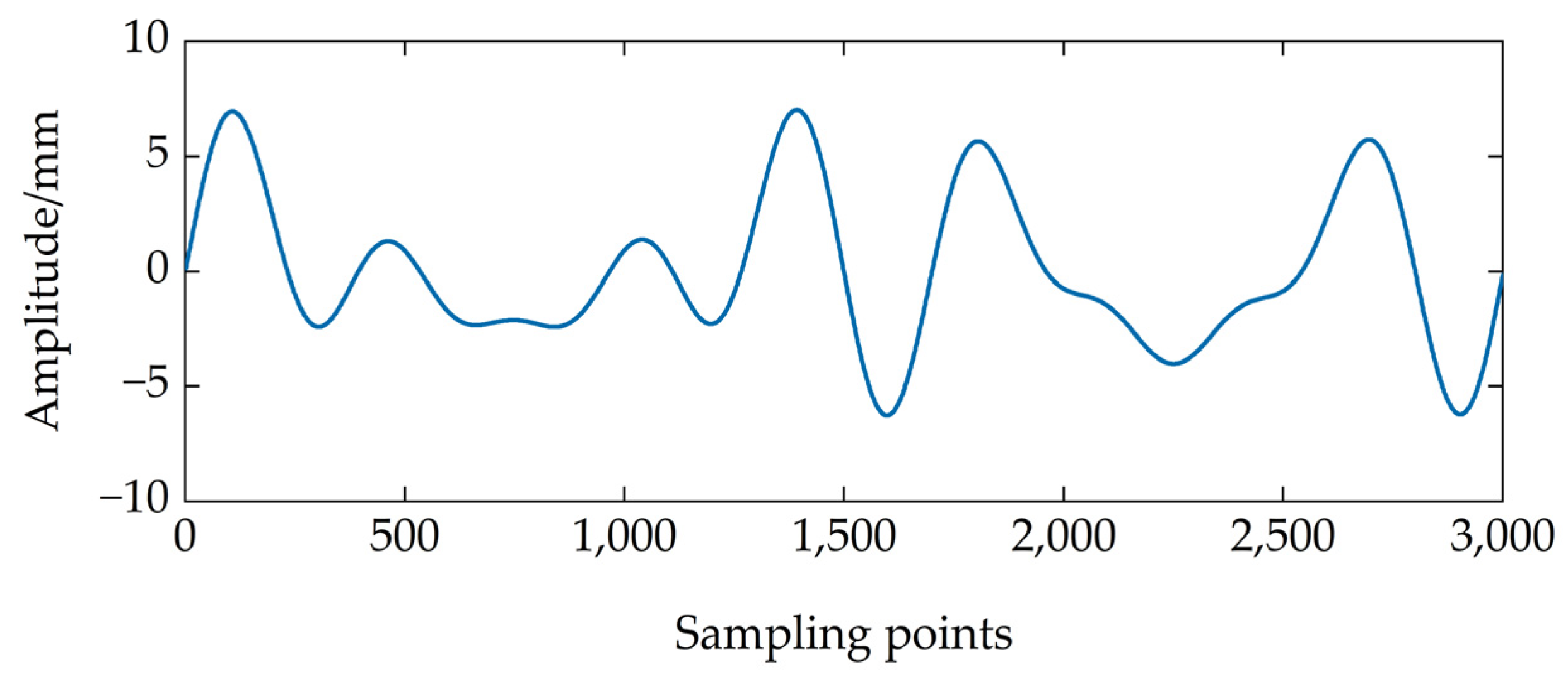
4. Simulation
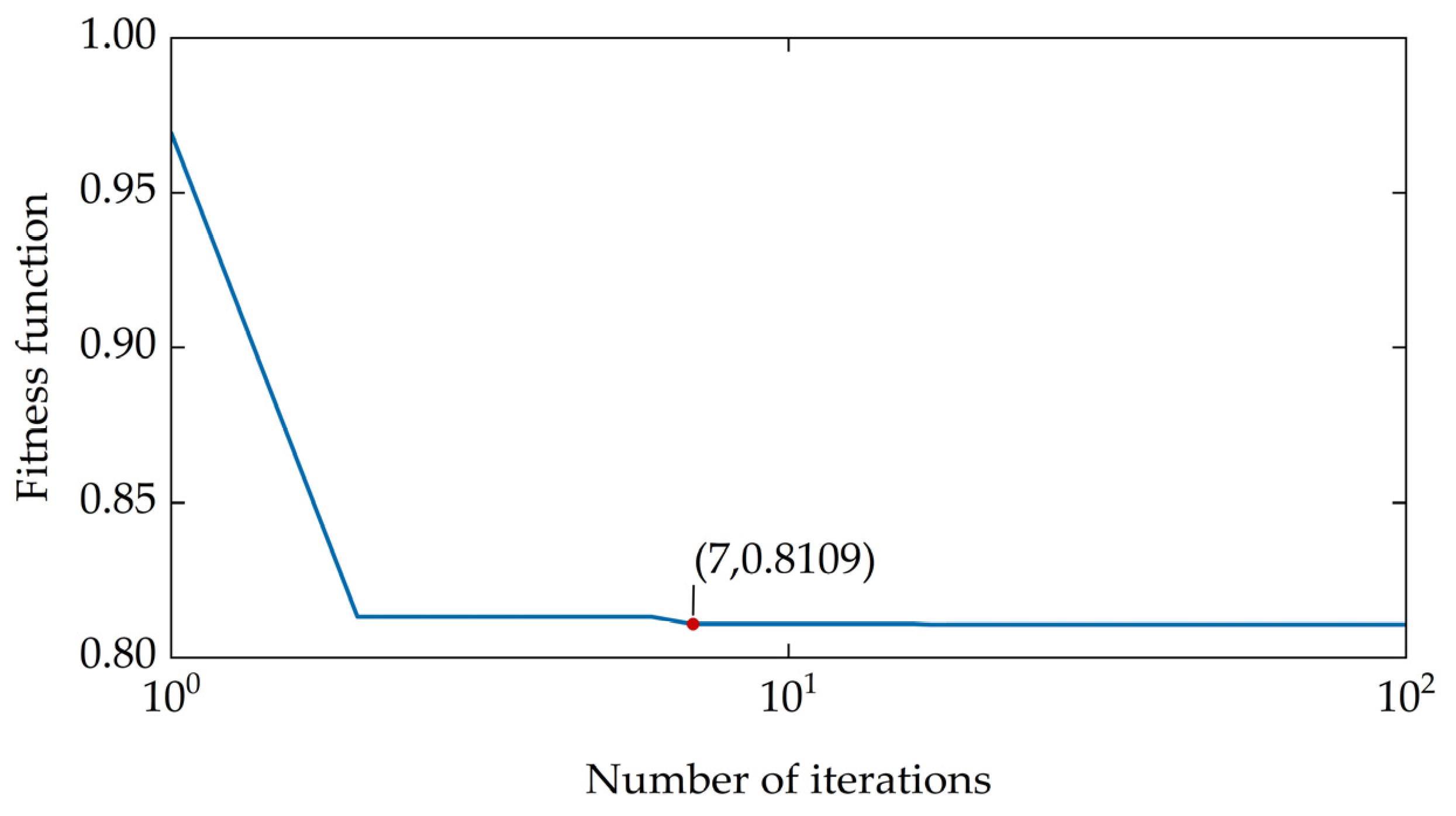
4.1. Process Analysis
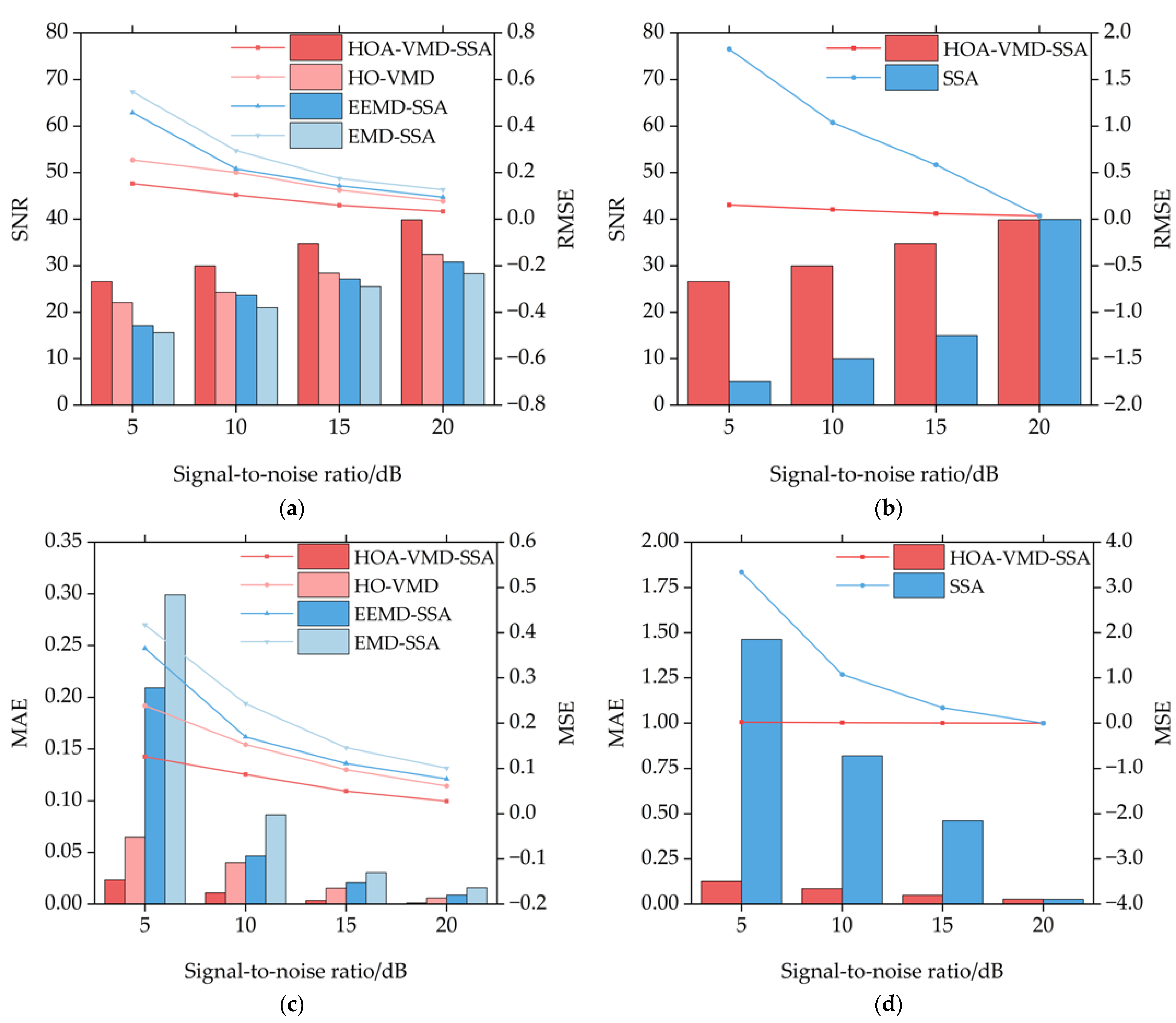
4.2. Results Analysis
- Index 1: Root Mean Square Error (RMSE)
- Index 2: Signal-to-Noise Ratio (SNR)
- Index 3: Mean Square Error (MSE)
- Index 4: Mean Absolute Error (MAE)
- Algorithmic Hybridization Contrast: The proposed HOA-VMD-SSA, HOA-VMD, EEMD-SSA, and EMD-SSA;
- Component Efficacy Verification: The proposed HOA-VMD-SSA and SSA.
5. Experiment
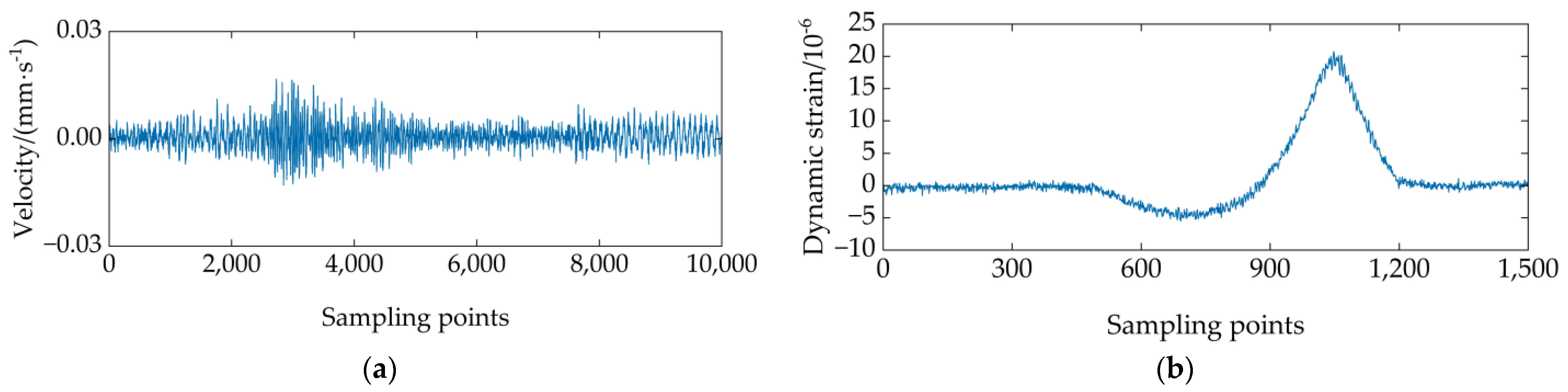
5.1. Signal Acquisition
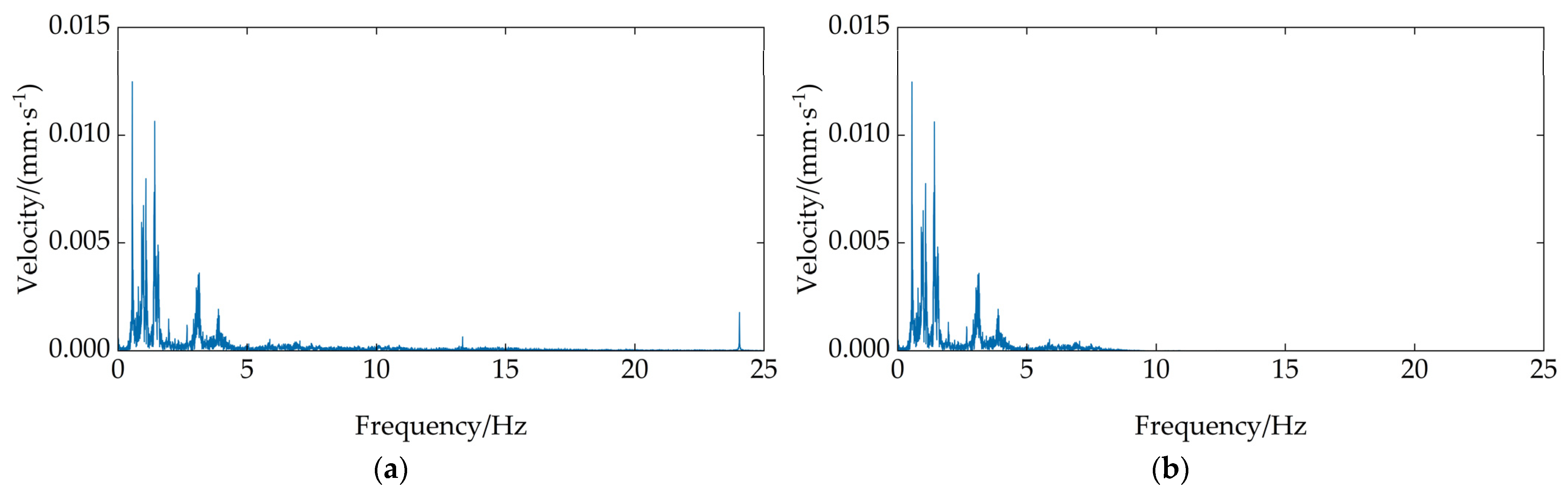
5.2. Signal Processing
5.3. Results Analysis
- Index 1: Normalization Shannon Entropy Ratio (NSER)
- Index 2: Noise Suppression Ratio (NSR)
- The bridge fundamental frequency signal;
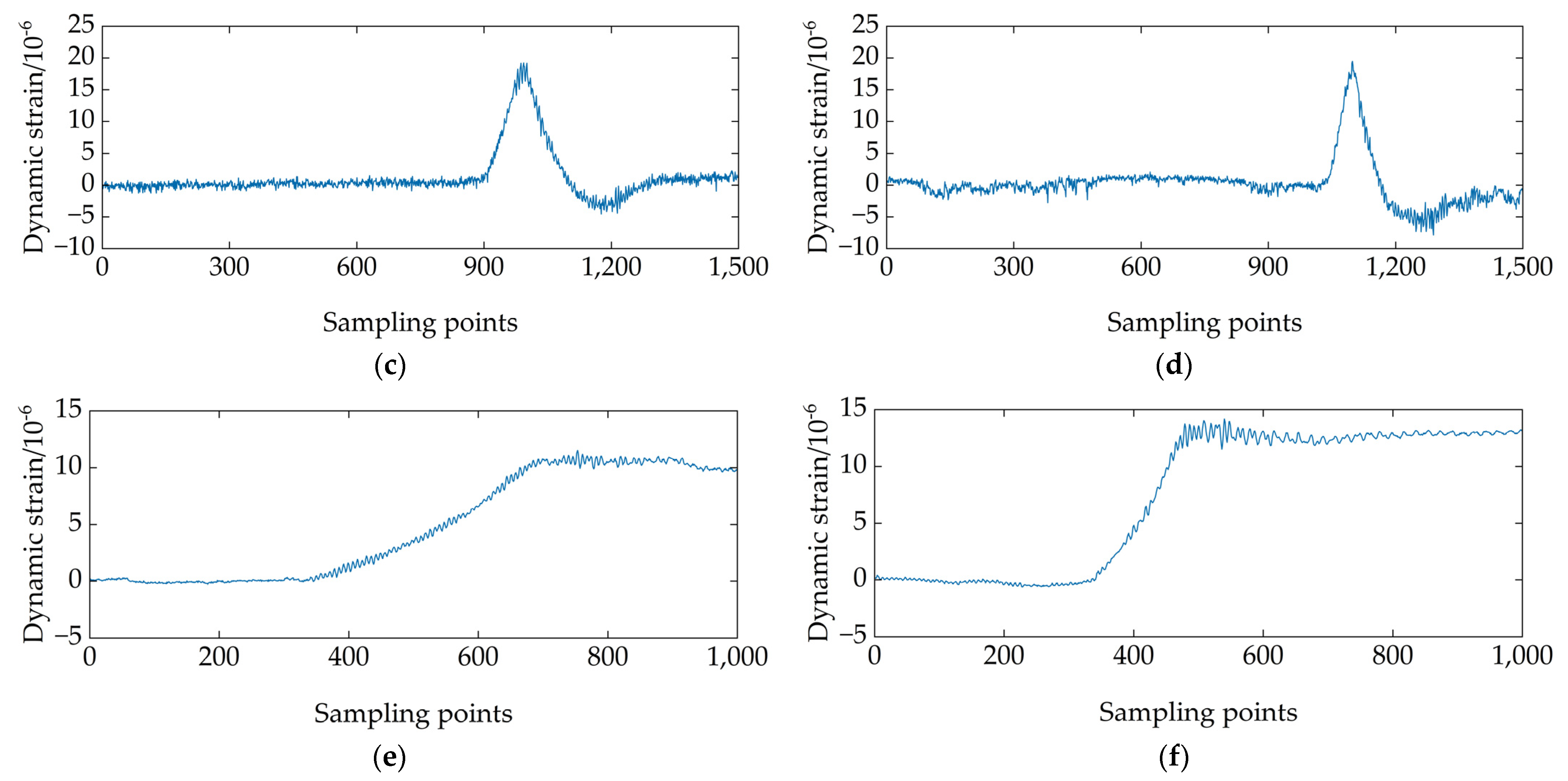
- The 30 km/h barrier-free traffic signal;
- The 10 km/h braking signal.
6. Discussion
- Although the current framework utilizes HOA for VMD parameter optimization, its failure to conduct comparative analyses with canonical metaheuristic optimizers (e.g., whale optimization algorithm, genetic algorithms) undermines methodological validation rigor. Furthermore, HOA’s triple-phase optimization mechanism raises unresolved questions regarding computational efficiency trade-offs in large-scale engineering applications.
- SSA denoising performance exhibits great dependence on the window length and reconstruction order. Despite the parameters being selected based on existing research, it does not consider whether the requirements of signal characteristics and algorithm combination on parameters will change, which raises questions about whether the chosen parameters are applicable to bridge signals. Therefore, it is necessary to pay continuous attention to the parameter selection of SSA.
- In the simulation experiment of this research, SSA shows characteristics of poor adaptability to noisy environments. This may result from the complex high-level white noise environment; some white noise is superimposed into impulse noise. As SSA has limited denoising ability for impulse noise, this leads to the distortion of denoising signals.
- In the present study, while the selection of VMD parameters was adaptively selected by the HOA, the parameter configuration for the SSA remained empirically determined through manual intervention. Therefore, it is paramount to validate the possibility of SSA parameters being optimized by meta-heuristic algorithms, which in turn allows for us to verify the adaptability of SSA for denoising bridge dynamic load test signals.
7. Conclusions
- SSA resolves persistent low-frequency oscillations in primary VMD outputs through an internal decomposition and reconstruction mechanism. It can effectively identify and separate the periodic and trending components in the signal, thereby eliminating oscillations and improving signal readability.
- Compared to other denoising methods, the proposed HOA-VMD-SSA achieves 16.2% RMSE reduction, 2.51% SNR enhancement, 62.02% MSE slump, and 43.74% MAE decline in numerical simulation. These results indicate that the proposed method in this research shows outstanding denoising stability under different noise level environments.
- Engineering validation shows that compared with other denoising methods, the proposed method in this research achieves a 12.8% NSER decrease and 8.44% NSR improvement, which shows that the proposed HOA-VMD-SSA is suitable for bridge dynamic load test signal denoising.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Hu, C.W.; Luo, W.B.; Chen, S.C. Evaluation of bearing capacity of reinforced stone arch bridge based on dynamic load test. IOP Conf. Ser. Earth Environ. Sci. 2020, 546, 042069. [Google Scholar] [CrossRef]
- Gatti, M. Structural health monitoring of an operational bridge: A case study. Eng. Struct. 2019, 195, 200–209. [Google Scholar] [CrossRef]
- Sun, Z.L.; Lu, J.G. An ultrasonic signal denoising method for EMU wheel trackside fault diagnosis system based on improved threshold function. IEEE Access 2021, 9, 96244–96256. [Google Scholar] [CrossRef]
- Kordestani, H.; Zhang, C.W.; Masri, S.F.; Shadabfar, M. An empirical time-domain trend line-based bridge signal decomposing algorithm using Savitzky-Golay filter. Struct. Control Health Monit. 2021, 28, e2750. [Google Scholar] [CrossRef]
- Liu, X.L.; Wang, H.; Huang, M.; Yang, W.X. An improved second-order blind identification (SOBI) signal de-noising method for dynamic deflection measurements of bridges using ground-based synthetic aperture radar (GBSAR). Appl. Sci. 2019, 9, 3561. [Google Scholar] [CrossRef]
- Fang, Z.; Yu, J.Y.; Meng, X.L. Modal parameters identification of bridge structures from GNSS data using the improved empirical wavelet transform. Remote Sens. 2021, 13, 3375. [Google Scholar] [CrossRef]
- Huang, N.E.; Shen, Z.; Long, S.R.; Wu, M.C.; Shih, H.H.; Zheng, Q.A.; Yen, N.C.; Tung, C.; Liu, H.H. The empirical mode decomposition and the Hilbert spectrum for nonlinear and non-stationary time series analysis. Proc. R. Soc. Lond. A 1998, 454, 903–995. [Google Scholar] [CrossRef]
- Ge, H.Q.; Chen, G.B.; Yu, H.C.; Chen, H.B.; An, F.P. Theoretical analysis of empirical mode decomposition. Symmetry 2018, 10, 623. [Google Scholar] [CrossRef]
- Wu, Z.; Huang, N.E. Ensemble empirical mode decomposition: A noise-assisted data analysis method. Adv. Adapt. Data Anal. 2009, 1, 1–41. [Google Scholar] [CrossRef]
- Dragomiretskiy, K.; Zosso, D. Variational mode decomposition. IEEE Trans. Signal Process. 2014, 62, 531–544. [Google Scholar] [CrossRef]
- Zhou, J.; Guo, X.M.; Wang, Z.J.; Du, W.H.; Wang, J.Y.; Han, X.F.; Wang, J.T.; He, G.F.; He, H.H.; Xue, H.L.; et al. Research on fault extraction method of variational mode decomposition based on immunized fruit fly optimization algorithm. Entropy 2019, 21, 400. [Google Scholar] [CrossRef] [PubMed]
- Ji, H.X.; Huang, K.; Mo, C.Q. Research on the application of variational mode decomposition optimized by snake optimization algorithm in rolling bearing fault diagnosis. Shock Vib. 2024, 2024, 5549976. [Google Scholar] [CrossRef]
- Fang, T.; Ma, L.; Zhang, H.K. Research on fault diagnosis method with adaptive artificial gorilla troops optimization optimized variational mode decomposition and support vector machine parameters. Machines 2024, 12, 637. [Google Scholar] [CrossRef]
- Nassef, M.G.A.; Hussein, T.M.; Mokhiamar, O. An adaptive variational mode decomposition based on sailfish optimization algorithm and Gini index for fault identification in rolling bearings. Measurement 2021, 173, 108514. [Google Scholar] [CrossRef]
- Zhang, X.; Miao, Q.; Zhang, H.; Wang, L. A parameter-adaptive VMD method based on grasshopper optimization algorithm to analyze vibration signals from rotating machinery. Mech. Syst. Signal Process. 2018, 108, 58–72. [Google Scholar] [CrossRef]
- Amiri, M.H.; Hashjin, N.M.; Montazeri, M.; Mirjalili, S.; Khodadadi, N. Hippopotamus optimization algorithm: A novel nature-inspired optimization algorithm. Sci. Rep. 2024, 14, 5032. [Google Scholar] [CrossRef]
- Maurya, P.; Tiwari, P.; Pratap, A. Application of the hippopotamus optimization algorithm for distribution network reconfiguration with distributed generation considering different load models for enhancement of power system performance. Electr. Eng. 2024, 2024, 1–38. [Google Scholar] [CrossRef]
- Chen, Y.Z.; Wu, F.; Shi, L.J.; Li, Y.; Qi, P.; Guo, X. Identification of sub-synchronous oscillation mode based on HO-VMD and SVD-regularized TLS-prony methods. Energies 2024, 17, 5067. [Google Scholar] [CrossRef]
- Lei, W.; Wang, G.; Wan, B.Q.; Min, Y.Z.; Wu, J.M.; Li, B.P. High voltage shunt reactor acoustic signal denoising based on the combination of VMD parameters optimized by coati optimization algorithm and wavelet threshold. Measurement 2024, 224, 113854. [Google Scholar] [CrossRef]
- Li, H.; Li, S.S.; Sun, J.; Huang, B.C.; Zhang, J.Q.; Gao, M.Y. Ultrasound signal processing based on joint GWO-VMD wavelet threshold functions. Measurement 2024, 226, 114143. [Google Scholar] [CrossRef]
- Zhou, Y.T.; Zhu, Z.L. A hybrid method for noise suppression using variational mode decomposition and singular spectrum analysis. J. Appl. Geophys. 2019, 161, 105–115. [Google Scholar] [CrossRef]
- Li, H.; Liu, T.; Wu, X.; Chen, Q. An optimized VMD method and its applications in bearing fault diagnosis. Measurement 2020, 166, 108185. [Google Scholar] [CrossRef]
- Gan, M.; Pan, H.D.; Chen, Y.P.; Pan, S.Q. Application of the variational mode decomposition (VMD) method to river tides. Estuar. Coast. Shelf Sci. 2021, 261, 107570. [Google Scholar] [CrossRef]
- Jia, B.; Li, S.L.; Liu, D.S.; Wu, S.F. Application of low-frequency processing method based on VMD algorithm in blasting signal processing. Shock Vib. 2022, 2022, 5779714. [Google Scholar] [CrossRef]
- Gong, T.K.; Yuan, X.H.; Yuan, Y.B.; Lei, X.H.; Wang, X. Application of tentative variational mode decomposition in fault feature detection of rolling element bearing. Measurement 2019, 135, 481–492. [Google Scholar] [CrossRef]
- Li, Z.P.; Chen, J.L.; Zi, Y.Y.; Pan, J. Independence-oriented VMD to identify fault feature for wheel set bearing fault diagnosis of high speed locomotive. Mech. Syst. Signal Process. 2017, 85, 512–529. [Google Scholar] [CrossRef]
- Zhang, X.; Li, D.Q.; Li, J.; Li, Y. Grey wolf optimization-based variational mode decomposition for magnetotelluric data combined with detrended fluctuation analysis. Acta Geophys. 2022, 70, 111–120. [Google Scholar] [CrossRef]
- Chao, Z.X.; Yang, Y.; He, C.B.; Liu, Y.B.; Liu, X.Z.; Cao, Z. Feature extraction based on hierarchical improved envelope spectrum entropy for rolling bearing fault diagnosis. IEEE Trans. Instrum. Meas. 2023, 72, 1–12. [Google Scholar]
- Mahmoudvand, R.; Zokaei, M. On the singular values of the Hankel matrix with application in singular spectrum analysis. Chil. J. Stat. 2012, 3, 43–56. [Google Scholar]
- Wu, C.Y.; Duan, Y.Y.; Wang, H. Signal denoising of traffic speed deflectometer measurement based on partial swarm optimization-variational mode decomposition method. Sensors 2024, 24, 3708. [Google Scholar] [CrossRef]
- Cao, L.; Zhou, H.L.; Peng, W.B.; Liu, J.P.; Chen, Y.F. Analytical analysis on the static support reactions of single-column pier bridges using the grey wolf optimizer. Structures 2023, 55, 2003–2012. [Google Scholar] [CrossRef]
- Mao, M.H.; Chang, J.; Sun, J.C.; Lin, S.; Wang, Z.H. Research on VMD-based adaptive TDLAS signal denoising method. Photonics 2023, 10, 674. [Google Scholar] [CrossRef]
- Lin, F.Z.; Scherer, R.J. Concrete bridge damage detection using parallel simulation. Autom. Constr. 2020, 119, 103283. [Google Scholar] [CrossRef]
- Jiang, W.G.; You, W. A combined denoising method of empirical mode decomposition and singular spectrum analysis applied to Jason altimeter waveforms: A case of the Caspian Sea. Geod. Geodyn. 2022, 13, 327–342. [Google Scholar] [CrossRef]
- Wang, X.G.; Li, W.H.; Ma, M.; Yang, F.; Song, S. Bridge damage identification based on encoded images and convolutional neural network. Buildings 2024, 14, 3104. [Google Scholar] [CrossRef]
- Fu, J.J.; Cai, F.Y.; Guo, Y.H.; Liu, H.D.; Niu, W.T. An improved VMD-based denoising method for time domain load signal combining wavelet with singular spectrum analysis. Math. Probl. Eng. 2020, 2020, 1485937. [Google Scholar] [CrossRef]
- Asgarkhani, N.; Kazemi, F.; Jankowski, R. Machine learning-based prediction of residual drift and seismic risk assessment of steel moment-resisting frames considering soil-structure interaction. Comput. Struct. 2023, 289, 107181. [Google Scholar] [CrossRef]
- Wang, D.M.; Zhu, L.J.; Yue, J.K.; Lu, J.Y.; Li, D.W.; Li, G.F. Application of variational mode decomposition based on particle swarm optimization in pipeline leak detection. Eng. Res. Express 2020, 2, 045036. [Google Scholar] [CrossRef]
- Kim, C.; Kawatani, M.; Kwon, Y. Impact coefficient of reinforced concrete slab on a steel girder bridge. Eng. Struct. 2007, 29, 576–590. [Google Scholar] [CrossRef]
- Peng, K.; Guo, H.Y.; Shang, X.Y. EEMD and multiscale PCA-based signal denoising method and its application to seismic P-phase arrival picking. Sensors 2021, 21, 5271. [Google Scholar] [CrossRef]
- Zhang, J.; He, J.J.; Long, J.C.; Yao, M.; Zhou, W. A new denoising method for UHF PD signals using adaptive VMD and SSA-based shrinkage method. Sensors 2019, 19, 1594. [Google Scholar] [CrossRef] [PubMed]
- Li, L.A.; Wei, X.L. Suppression method of partial discharge interferences based on singular value decomposition and improved empirical mode decomposition. Energies 2021, 14, 8579. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| IMF | Correlation Coefficient | IMF | Correlation Coefficient |
|---|---|---|---|
| 1 | 0.9833 | 11 | 0.0469 |
| 2 | 0.3481 | 12 | 0.0452 |
| 3 | 0.0623 | 13 | 0.0454 |
| 4 | 0.0530 | 14 | 0.0446 |
| 5 | 0.0528 | 15 | 0.0457 |
| 6 | 0.0523 | 16 | 0.0468 |
| 7 | 0.0527 | 17 | 0.0465 |
| 8 | 0.0501 | 18 | 0.0460 |
| 9 | 0.0475 | 19 | 0.0436 |
| 10 | 0.0459 | 20 | 0.0420 |
| Method | Best Parameter [,] | Correlation Coefficient | Time/min |
|---|---|---|---|
| HOA-VMD | [20,1544] | 0.9924 | 64.64 |
| PSO-VMD | [20,1237] | 0.9683 | 59.11 |
| GWO-VMD | [20,1551] | 0.9733 | 63.98 |
| Denoising Method | 5 dB | 10 dB | 15 dB | 20 dB | ||||
|---|---|---|---|---|---|---|---|---|
| RMSE | SNR | RMSE | SNR | RMSE | SNR | RMSE | SNR | |
| HOA-VMD-SSA | 0.1530 | 26.62 | 0.1042 | 29.95 | 0.0598 | 34.78 | 0.0333 | 39.85 |
| HOA-VMD | 0.2545 | 22.13 | 0.2008 | 24.27 | 0.1250 | 28.38 | 0.0778 | 32.45 |
| EEMD-SSA | 0.4575 | 17.11 | 0.2159 | 23.63 | 0.1437 | 27.16 | 0.0946 | 30.79 |
| EMD-SSA | 0.5468 | 15.56 | 0.2939 | 20.95 | 0.1749 | 25.46 | 0.1266 | 28.27 |
| SSA | 1.8271 | 5.08 | 1.0379 | 9.99 | 0.5836 | 14.99 | 0.0330 | 39.93 |
| Denoising Method | 5 dB | 10 dB | 15 dB | 20 dB | ||||
|---|---|---|---|---|---|---|---|---|
| MSE | MAE | MSE | MAE | MSE | MAE | MSE | MAE | |
| HOA-VMD-SSA | 0.0234 | 0.1257 | 0.0109 | 0.0867 | 0.0036 | 0.0498 | 0.0011 | 0.0278 |
| HOA-VMD | 0.0648 | 0.2388 | 0.0403 | 0.1530 | 0.0156 | 0.0971 | 0.0061 | 0.0611 |
| EEMD-SSA | 0.2093 | 0.3654 | 0.0466 | 0.1695 | 0.0207 | 0.1107 | 0.0089 | 0.0770 |
| EMD-SSA | 0.2990 | 0.4174 | 0.0864 | 0.2434 | 0.0306 | 0.1458 | 0.0160 | 0.1007 |
| SSA | 3.3383 | 1.4630 | 1.0772 | 0.8205 | 0.3406 | 0.4614 | 0.0011 | 0.0274 |
| Test Project | Details | Sampling Frequency |
|---|---|---|
| Fundamental frequency detection | Measure the natural vibration frequency of the bridge structure that is applied by the natural environment. Provide a basis for evaluating the dynamic characteristics of the bridge. | 100 Hz |
| Driving vibration excitation | Simulate the bridge response under normal driving conditions. The test speeds are set to 10 km/h, 20 km/h, and 30 km/h, respectively, to cover the influence of different driving speeds on the bridge structure. | 20 Hz |
| Braking vibration excitation | Simulate the bridge response under emergency braking. The test speeds are 10 km/h and 20 km/h, respectively, to evaluate the structural stability of the bridge in emergency situations. | 20 Hz |
| Denoising Method | Fundamental Frequency Signal | 30 km/h Barrier-Free Traffic Signal | 10 km/h Braking Signal | |||
|---|---|---|---|---|---|---|
| NSER | NSR | NSER | NSR | NSER | NSR | |
| HOA-VMD-SSA | 0.8840 | 0.1592 | 0.7202 | 0.1965 | 0.7797 | 0.1565 |
| HOA-VMD | 0.9432 | 0.1580 | 0.7693 | 0.1823 | 0.8021 | 0.1495 |
| EEMD-SSA | 0.9601 | 0.1537 | 0.8866 | 0.1751 | 0.8759 | 0.1452 |
| EMD-SSA | 0.9845 | 0.1486 | 0.9202 | 0.1655 | 0.9013 | 0.1336 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhong, Z.; Li, Z.; Wang, J.; Tang, C.; Liu, Y.; Guo, K. Research on Denoising of Bridge Dynamic Load Signal Based on Hippopotamus Optimization Algorithm–Variational Mode Decomposition–Singular Spectrum Analysis Method. Buildings 2025, 15, 1390. https://doi.org/10.3390/buildings15081390
Zhong Z, Li Z, Wang J, Tang C, Liu Y, Guo K. Research on Denoising of Bridge Dynamic Load Signal Based on Hippopotamus Optimization Algorithm–Variational Mode Decomposition–Singular Spectrum Analysis Method. Buildings. 2025; 15(8):1390. https://doi.org/10.3390/buildings15081390
Chicago/Turabian StyleZhong, Zhengqiang, Zhen Li, Jinlong Wang, Cong Tang, Yu Liu, and Kaijun Guo. 2025. "Research on Denoising of Bridge Dynamic Load Signal Based on Hippopotamus Optimization Algorithm–Variational Mode Decomposition–Singular Spectrum Analysis Method" Buildings 15, no. 8: 1390. https://doi.org/10.3390/buildings15081390
APA StyleZhong, Z., Li, Z., Wang, J., Tang, C., Liu, Y., & Guo, K. (2025). Research on Denoising of Bridge Dynamic Load Signal Based on Hippopotamus Optimization Algorithm–Variational Mode Decomposition–Singular Spectrum Analysis Method. Buildings, 15(8), 1390. https://doi.org/10.3390/buildings15081390