

Jacking Force Prediction for Long-Distance Pipe by Integrating Physical Information and Adversarial Learning Mechanism

Abstract
1. Introduction
2. Methods
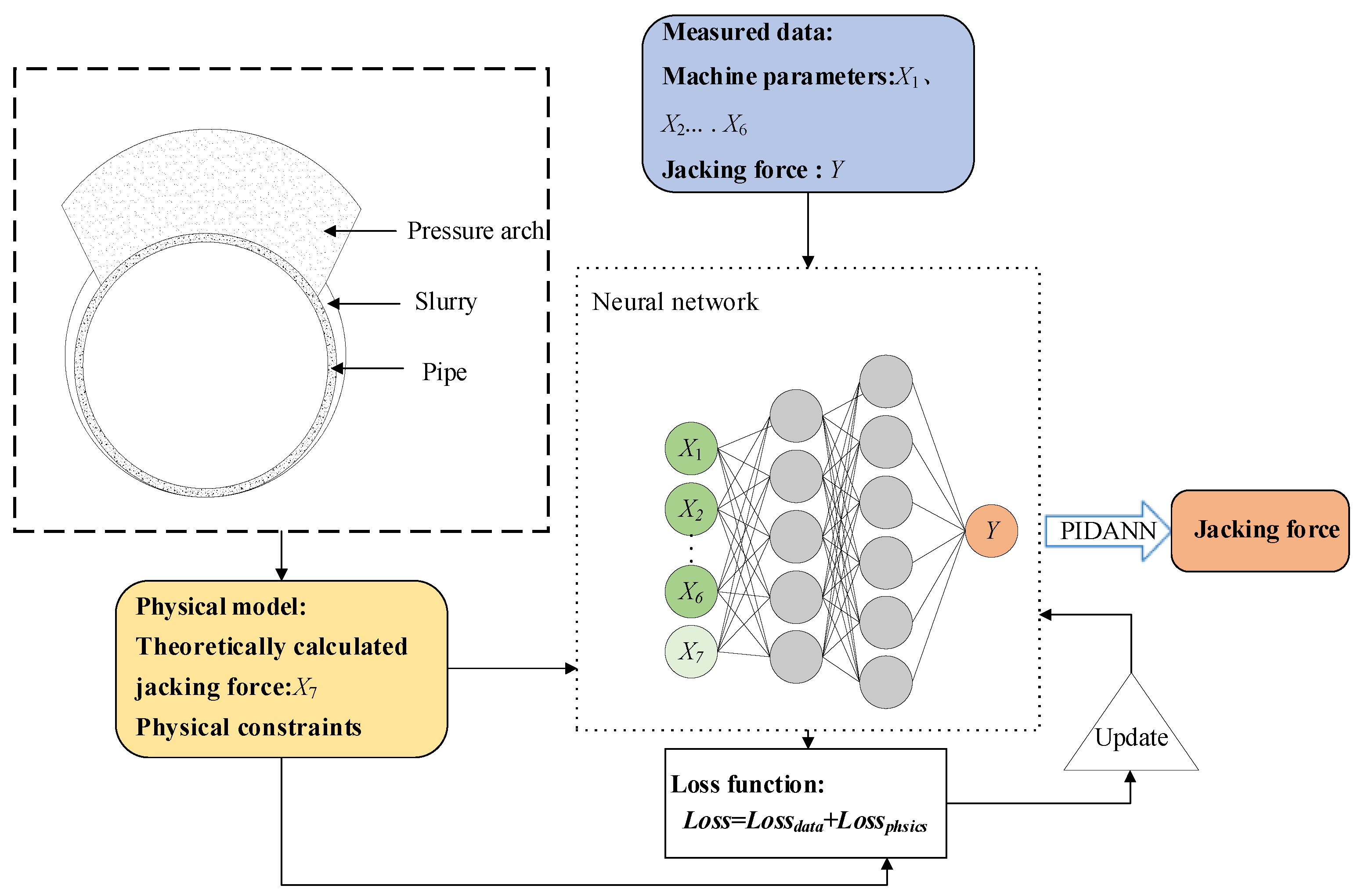
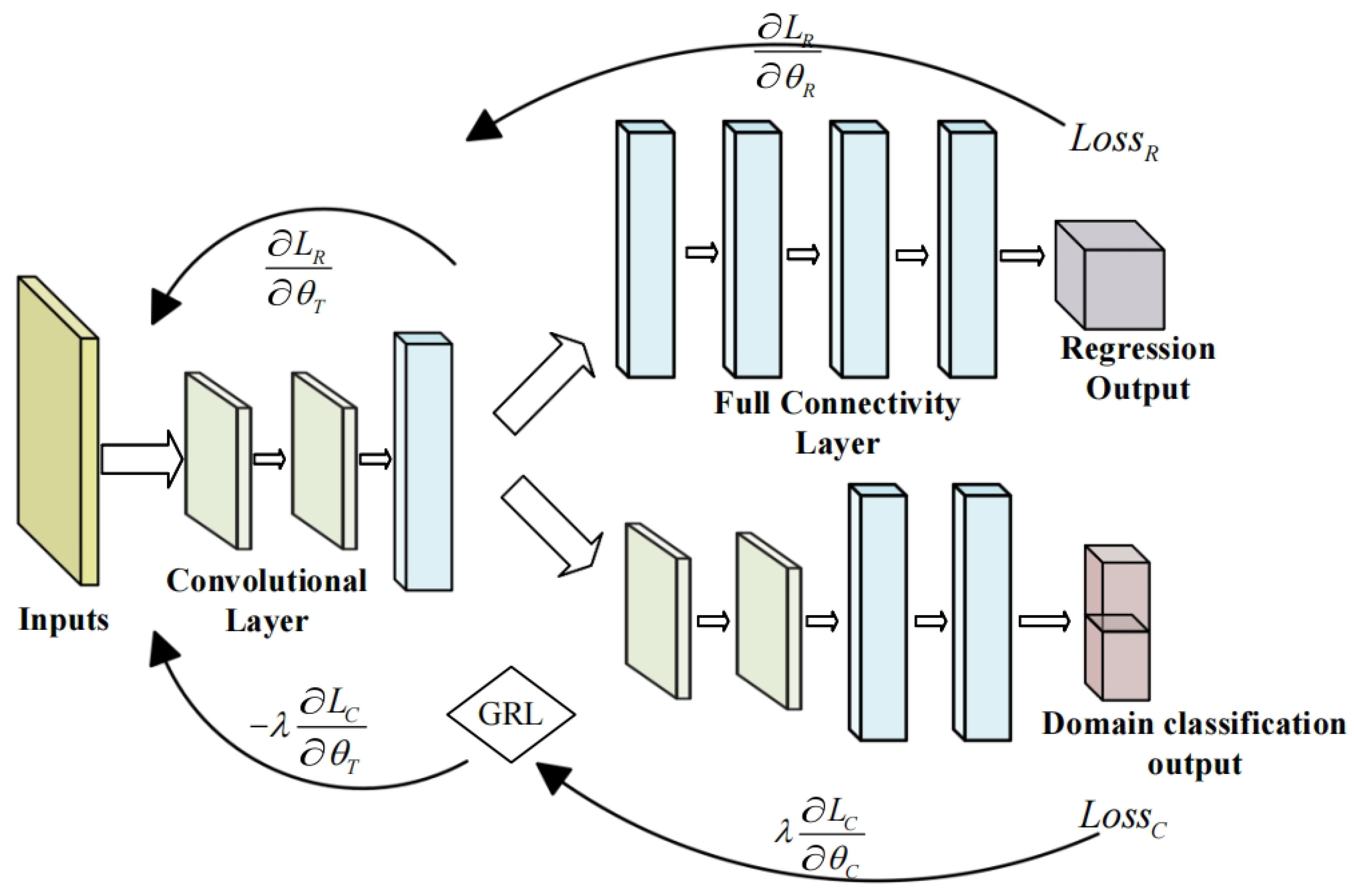
2.1. The Framework of PIDANN for Pipe Jacking Force
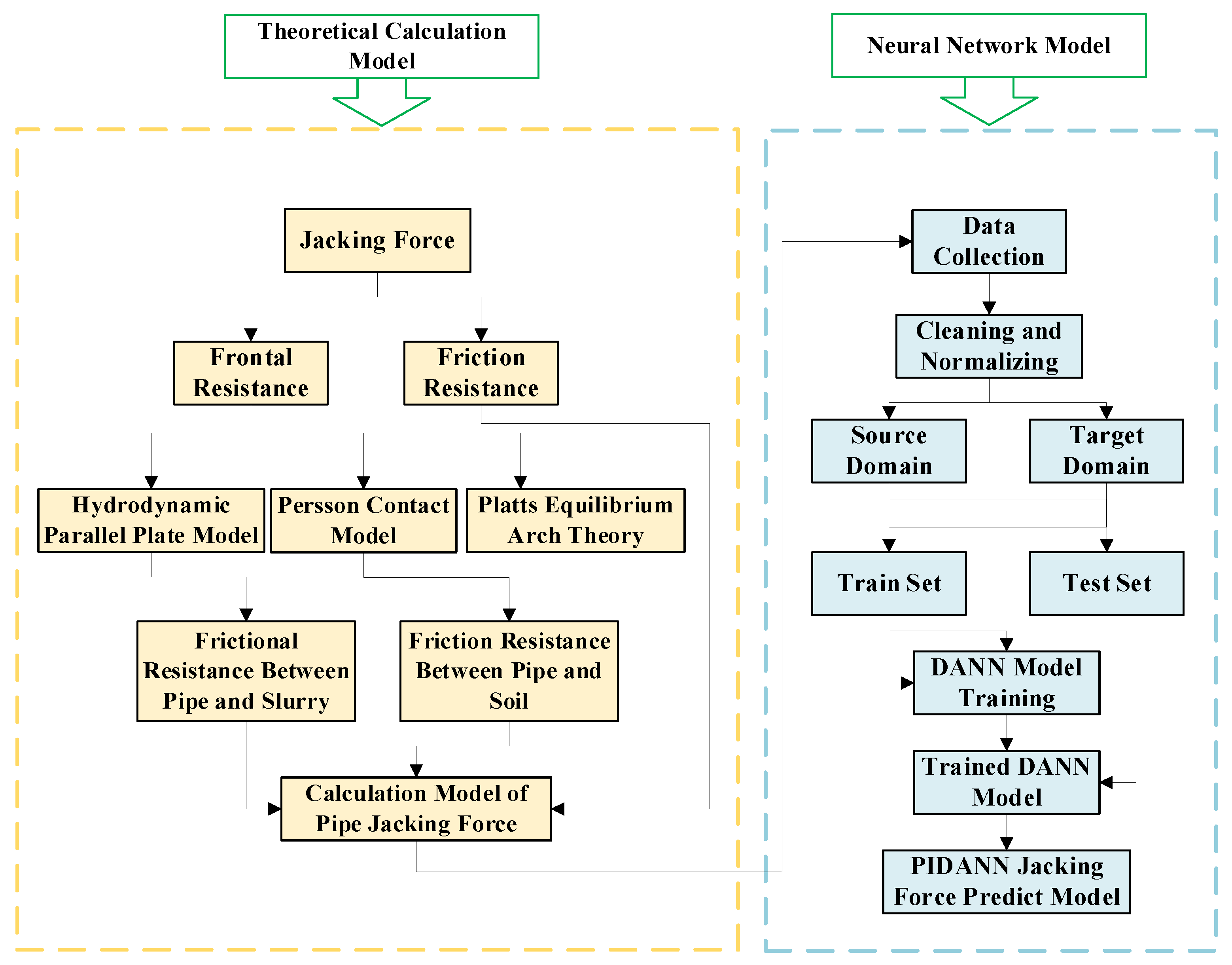
2.2. Theoretical Calculation Model of Pipe Jacking Force
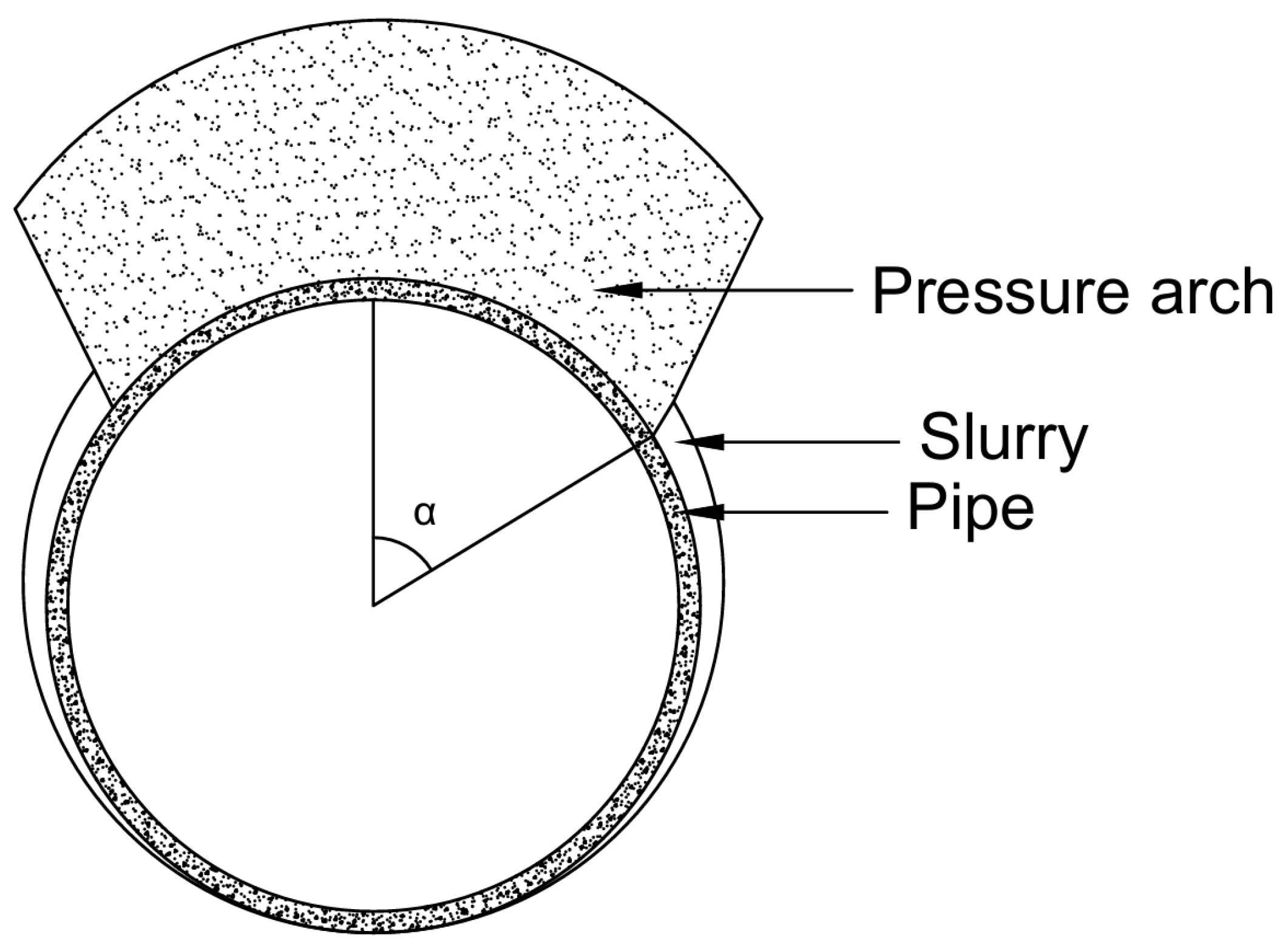
2.2.1. Calculation of Friction Resistance Between Pipe and Soil
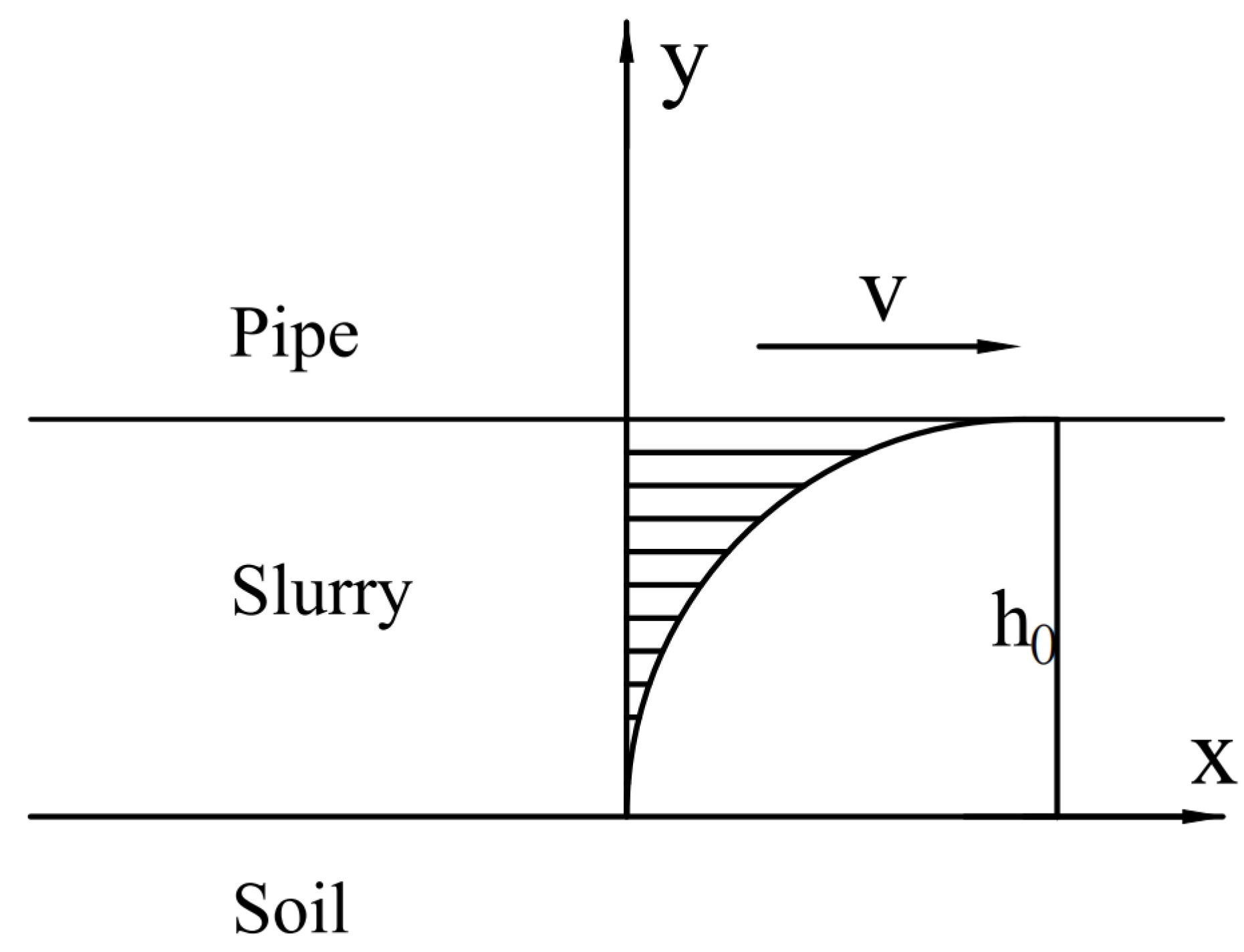
2.2.2. Calculation of Frictional Resistance Between Pipe and Slurry
2.2.3. Comparison of Models for Frictional Force Calculation

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Models | The Mean Frictional Force/kPa |
|---|---|
| Literature [6] | 4.61 |
| Literature [9] | 2.69 |
| GB 50268-2008 | 4 |
| The proposed model | 2.07 |
| Case Measurements | 1.42 |
2.3. Domain Adversarial Training of Neural Network
3. Case Study
3.1. Project Overview
| Shaft No. 1 | Shaft No. 2 | Shaft No. 3 | |
|---|---|---|---|
| Jacking lengths (m) | 1025 | 629 | 363 |
| Average overburden depths (m) | 7.72 | 8.12 | 7.94 |
| Working shaft pipe centerline elevation (m) | 67.6 | 69.8 | 65.1 |
| Receiving shaft pipe centerline elevation (m) | 69.8 | 69.8 | 65.1 |
| Soil layer type | silty loam | silty loam | powdery clay |
3.2. Data Collection and Preprocessing
3.3. Analysis of the PIDANN for Jacking Force Prediction
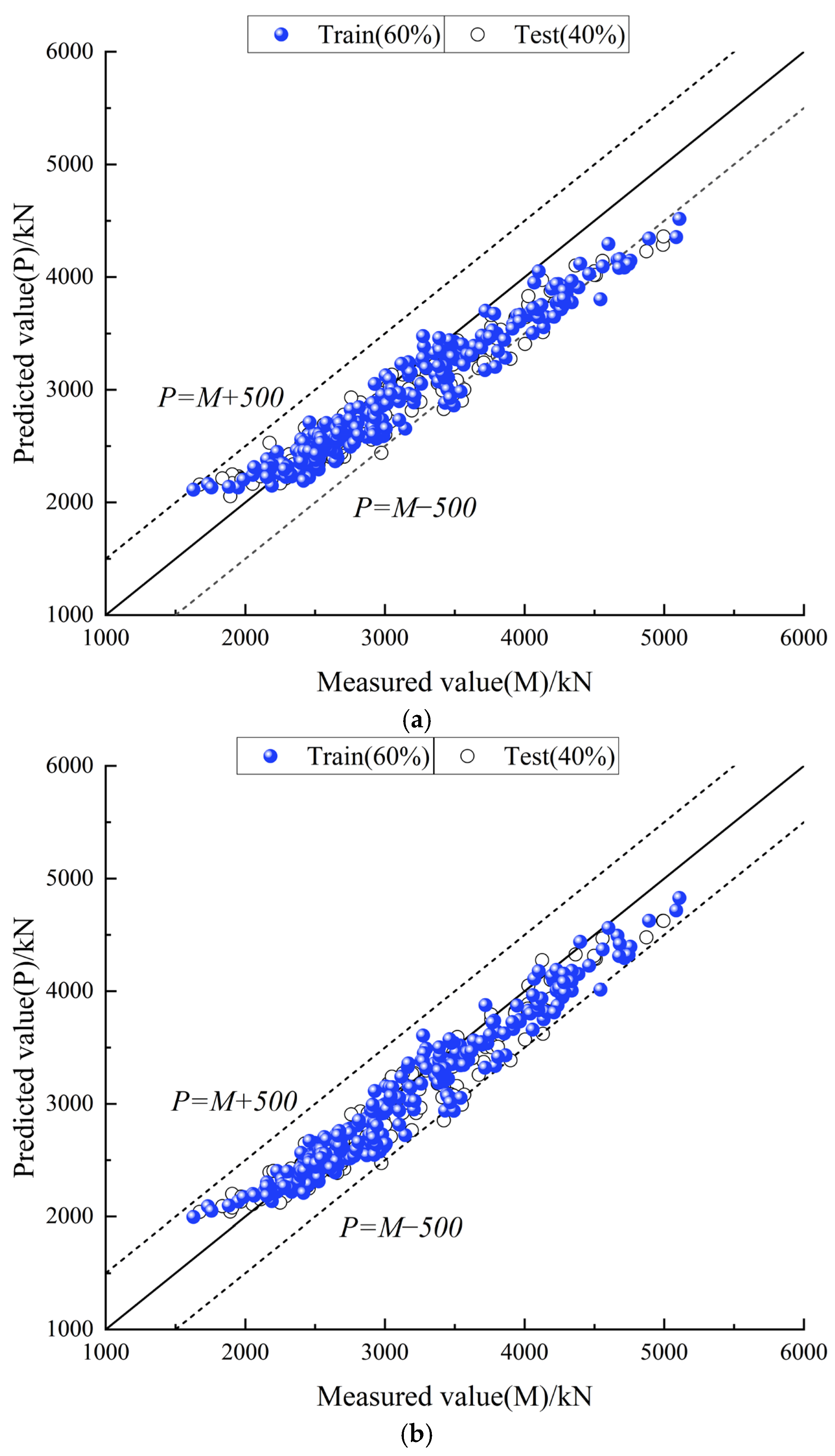
3.3.1. Analysis of Adversarial Learning Effectiveness
| Trainings | Dataset | MSE (kN2) | RMSE (kN) | MAE (kN) | MAPE (%) | R2 |
|---|---|---|---|---|---|---|
| Before adversarial training | Train | 68,503.67 | 261.73 | 197.94 | 23.49 | 0.87 |
| Test | 63,411.62 | 251.82 | 192.1 | 21.72 | 0.86 | |
| After adversarial training | Train | 33,302.20 | 182.49 | 139.71 | 4.43 | 0.94 |
| Test | 36,164.64 | 190.17 | 147.34 | 4.92 | 0.92 |
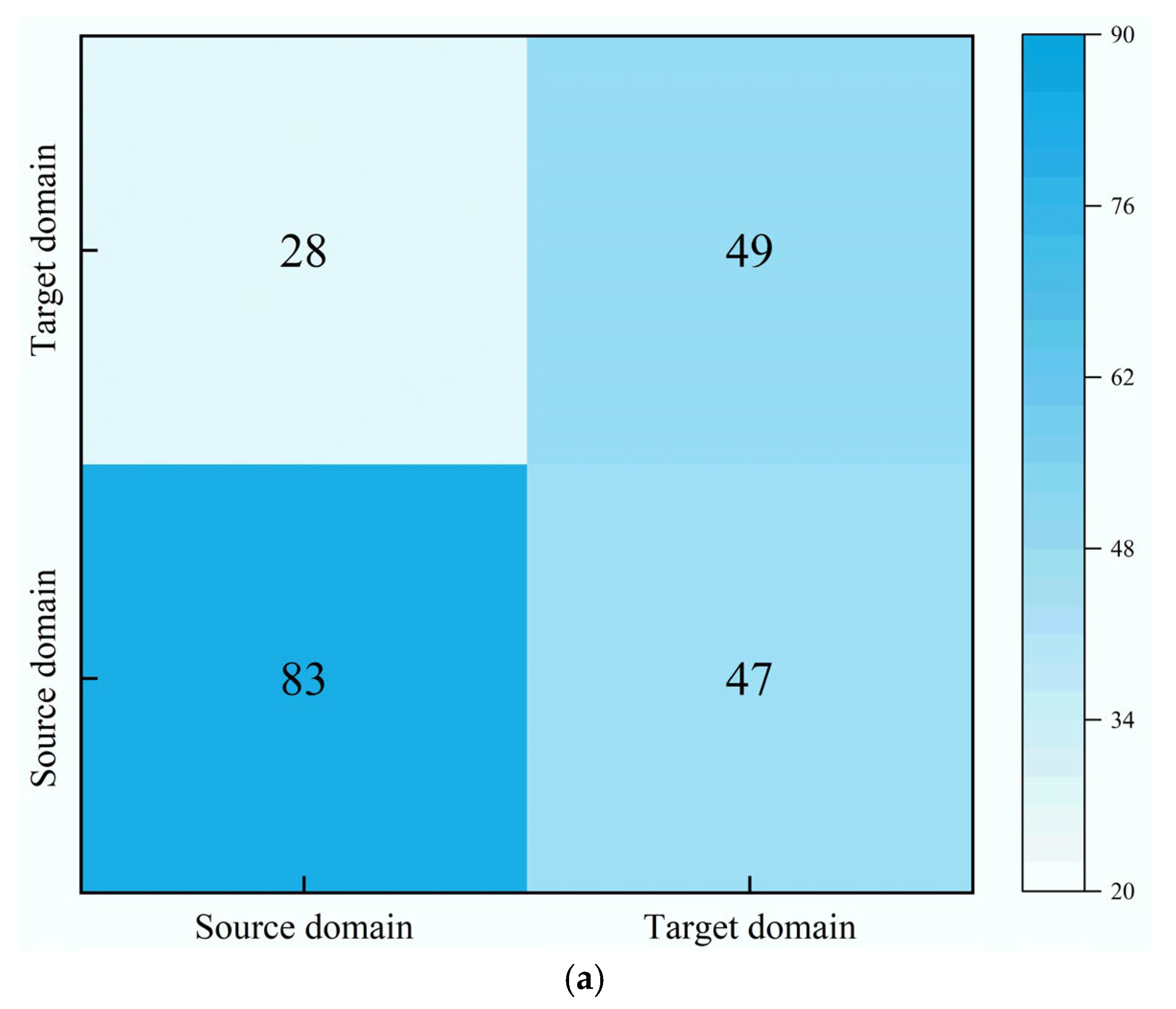
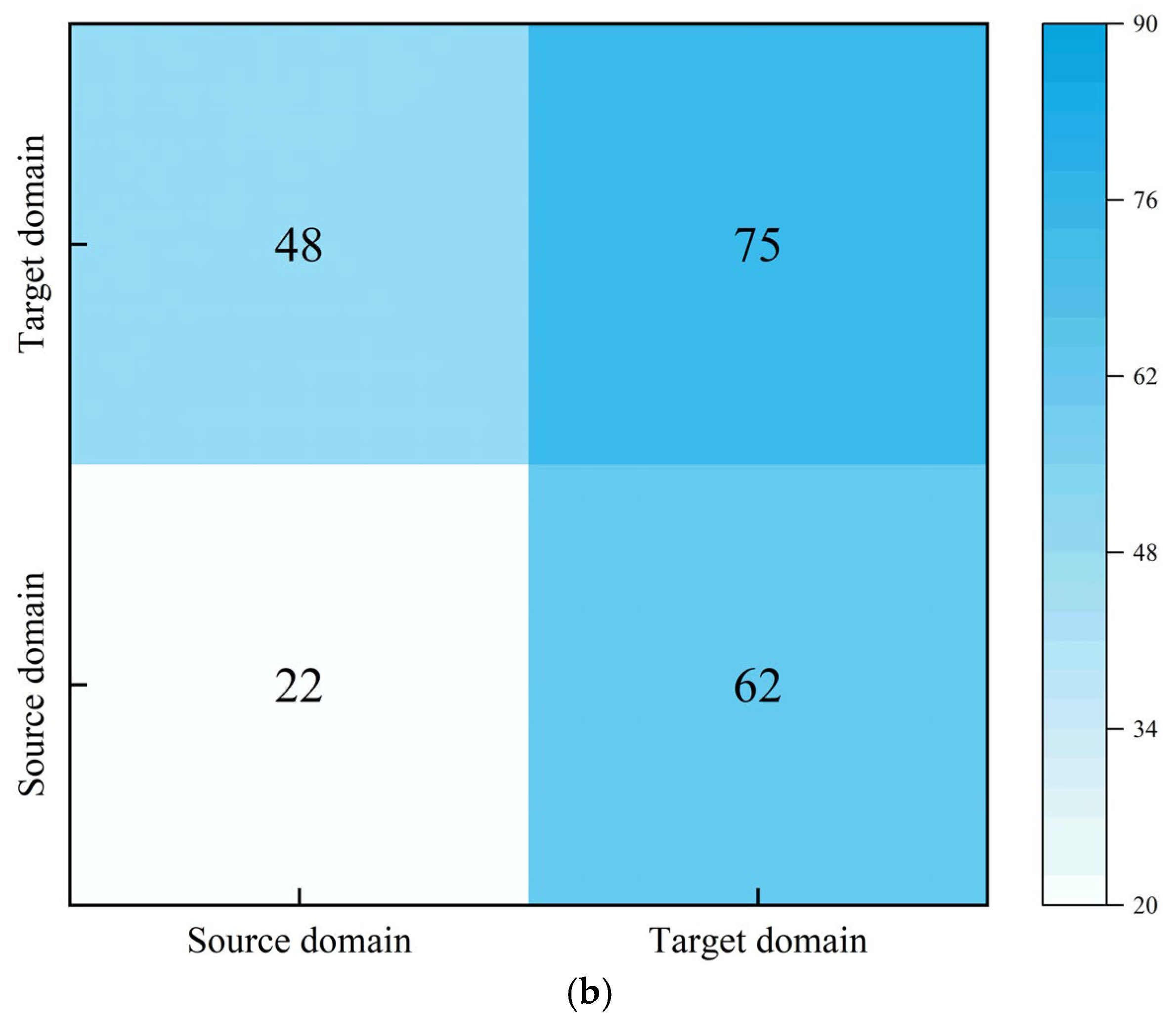
3.3.2. Results of Model Domain Classification
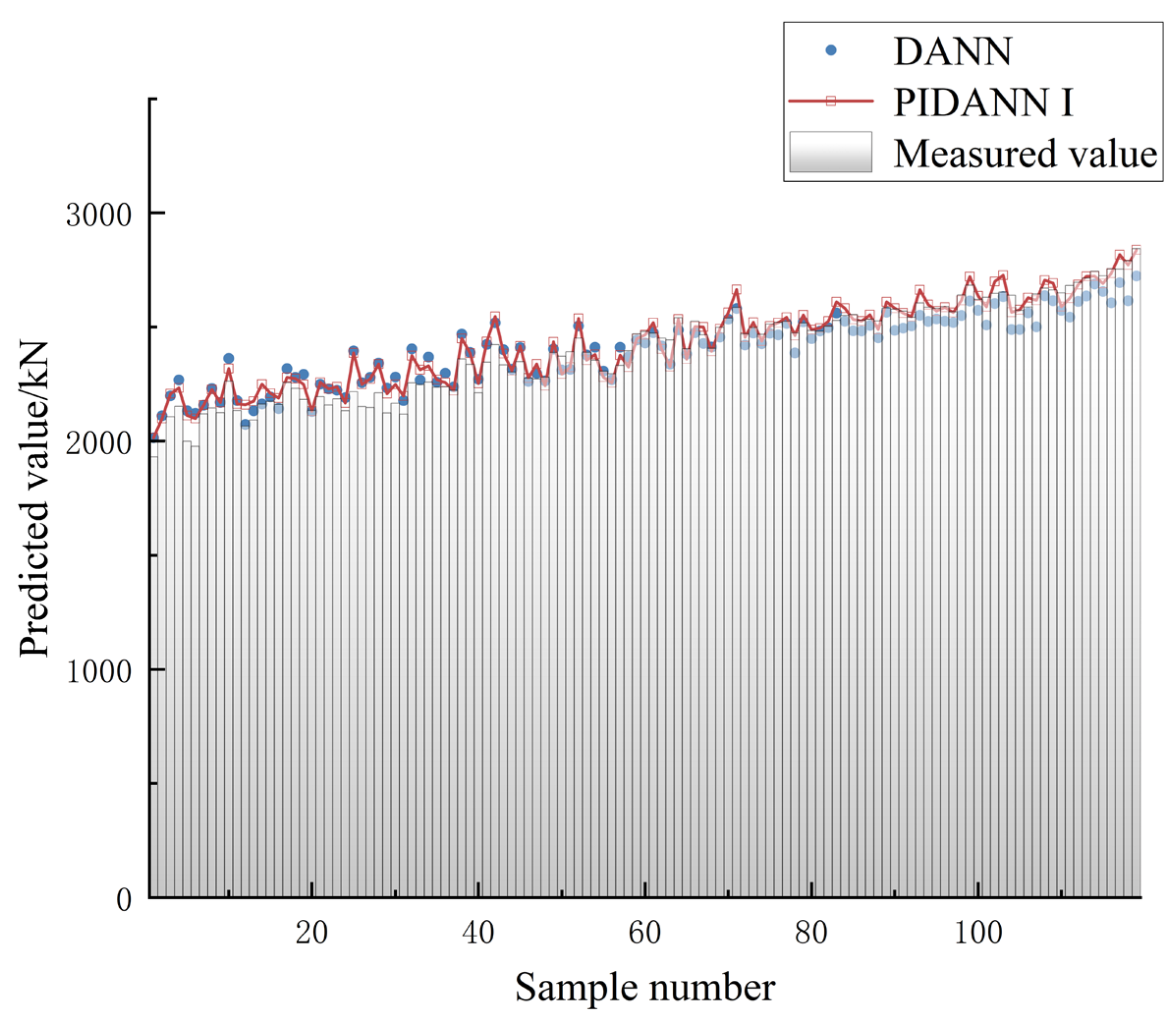
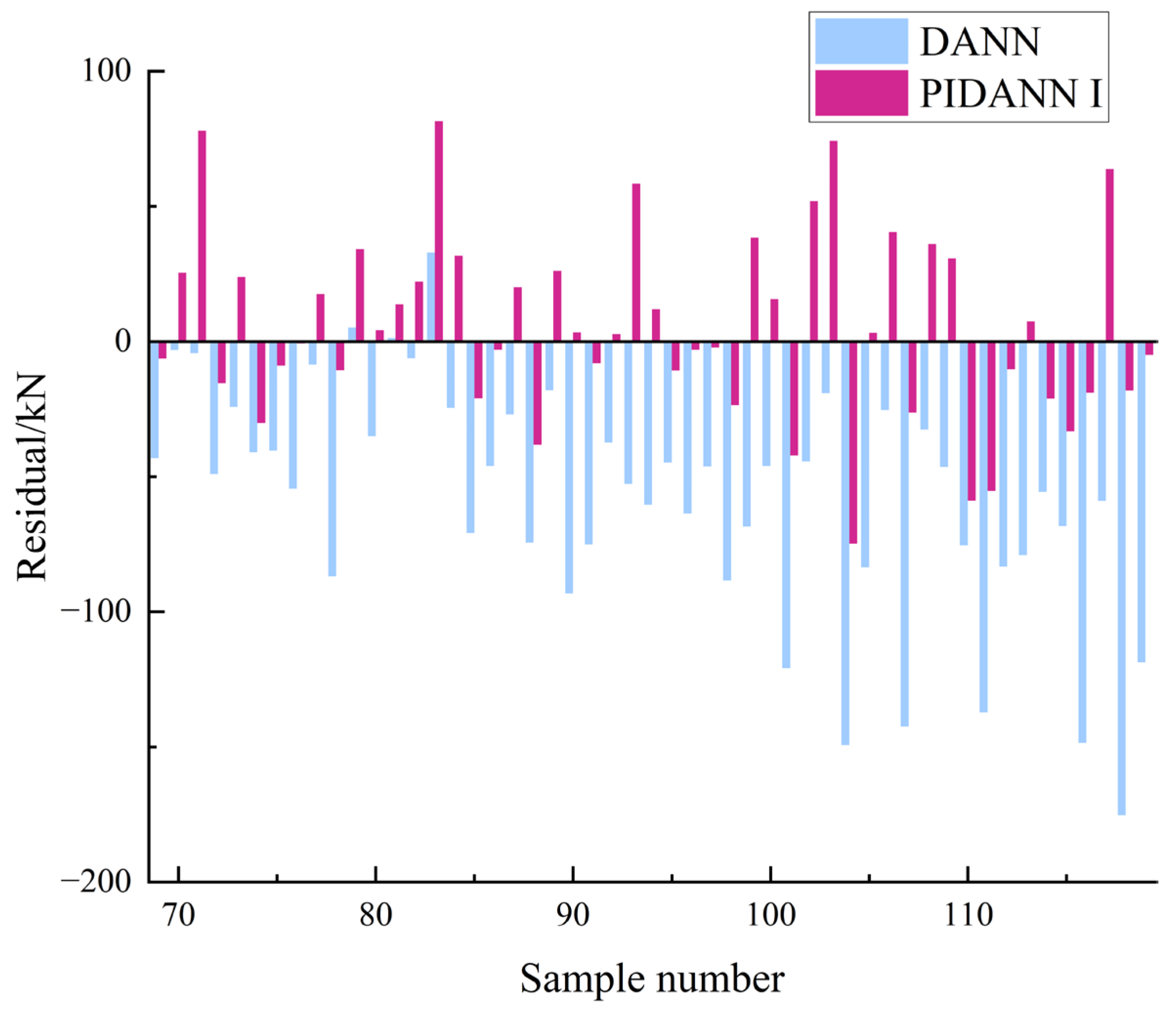
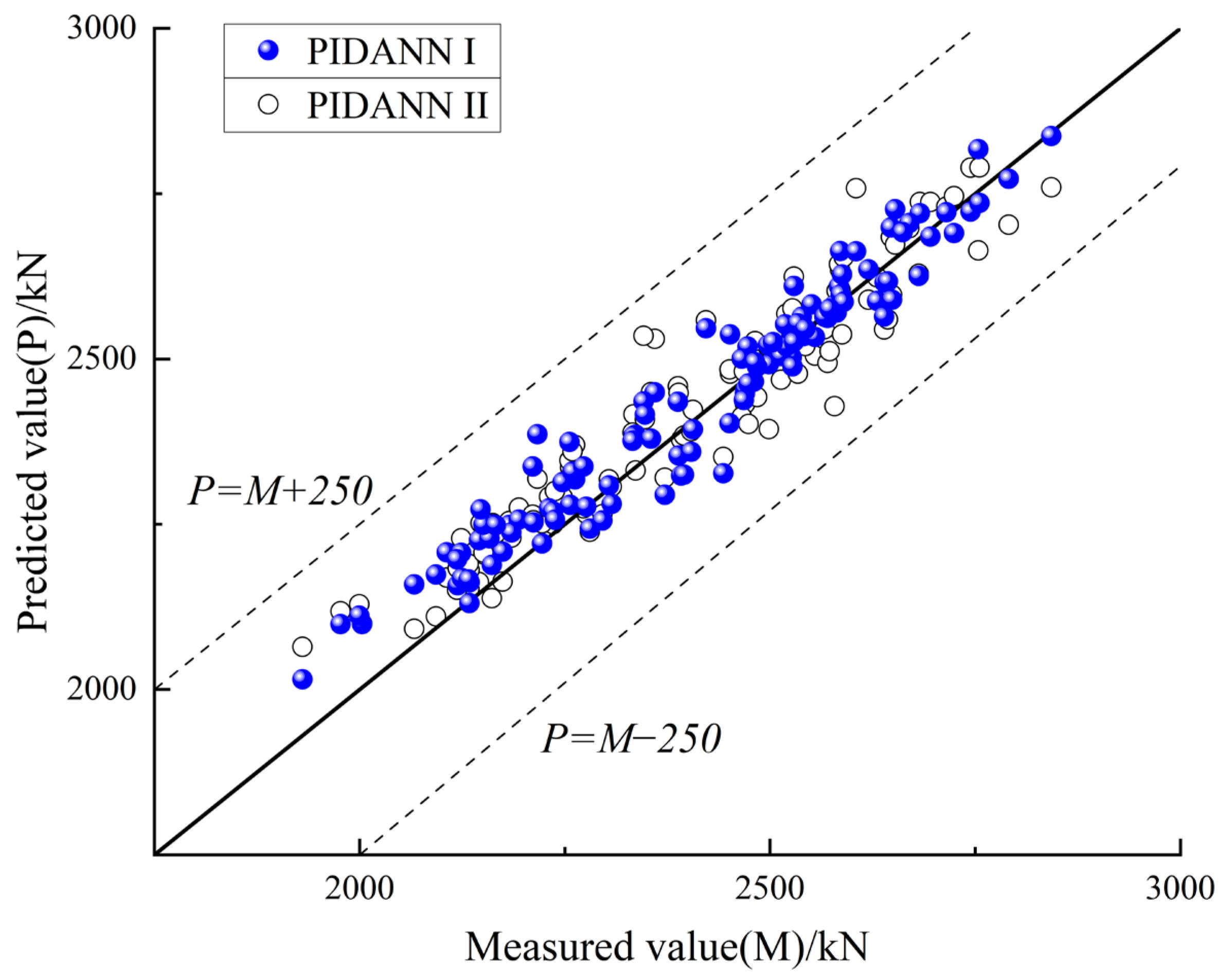
3.3.3. Analysis of the Effectiveness of Physical Information Integration
| Model | Dataset | MSE (kN2) | RMSE (kN) | MAE (kN) | MAPE (%) | R2 |
|---|---|---|---|---|---|---|
| DANN | Train | 33,302.20 | 182.49 | 139.71 | 4.43 | 0.94 |
| Test | 36,164.64 | 190.17 | 147.34 | 4.93 | 0.92 | |
| PIDANN I | Train | 32,200.40 | 179.44 | 139.23 | 4.51 | 0.94 |
| Test | 32,446.62 | 180.13 | 141.65 | 4.86 | 0.93 | |
| PIDANN II | Train | 30,623.68 | 175.00 | 135.52 | 4.34 | 0.94 |
| Test | 32,755.01 | 180.98 | 139.87 | 4.72 | 0.93 |
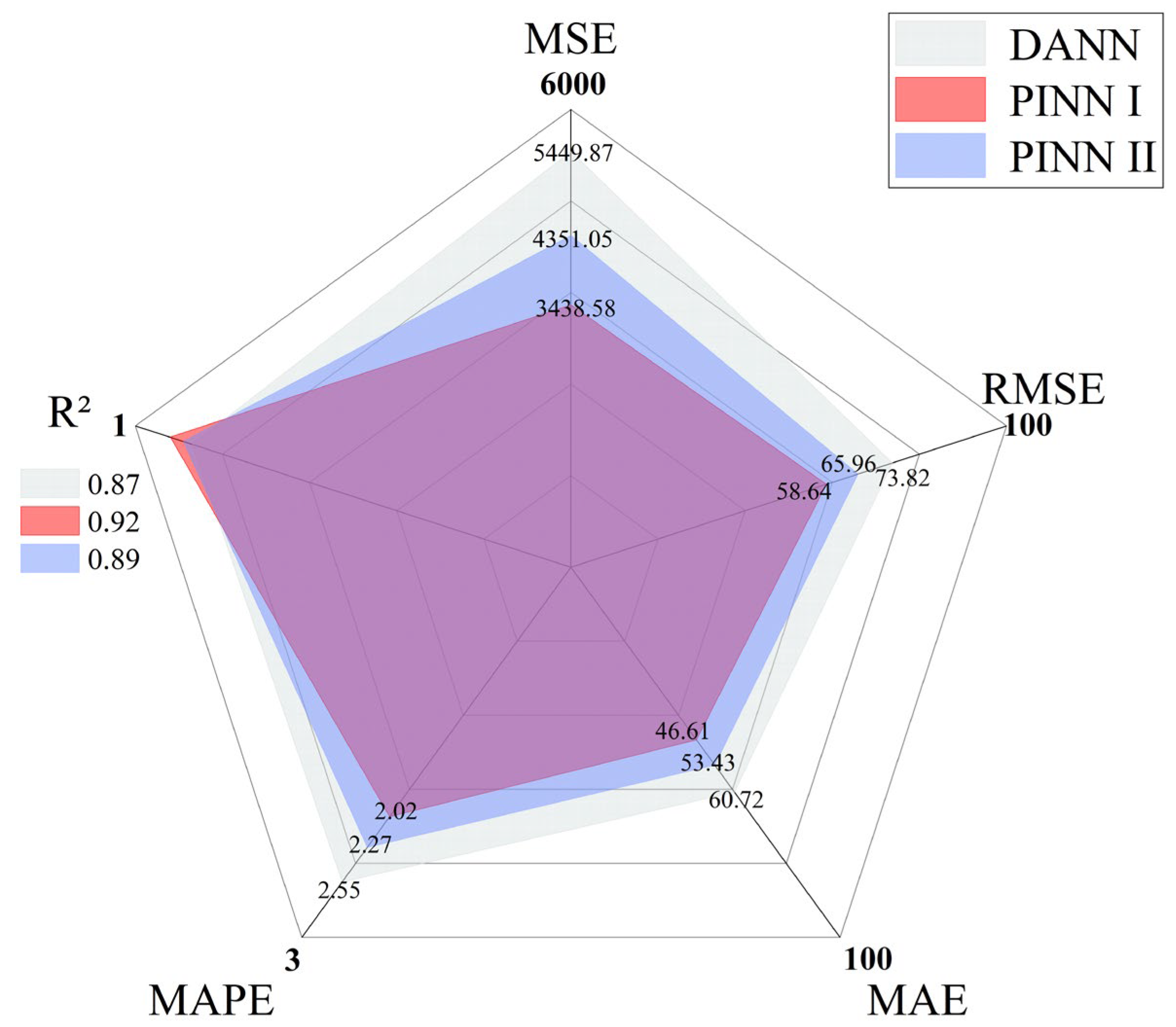
3.3.4. Comparison of Non-Transfer Learning Models and DANN Models
| Model | MSE (kN2) | RMSE (kN) | MAE (kN) | MAPE (%) | R2 |
|---|---|---|---|---|---|
| CNN | 27,516.61 | 165.88 | 134.92 | 5.57 | 0.35 |
| LSTM | 21,099.63 | 145.25 | 115.94 | 4.85 | 0.50 |
| BP | 26,504.26 | 162.80 | 134.37 | 5.69 | 0.38 |
| SVR | 17,180.08 | 131.07 | 108.26 | 4.48 | 0.60 |
| RF | 26,777.62 | 163.63 | 136.33 | 5.72 | 0.37 |
| DANN | 5449.87 | 73.82 | 60.72 | 2.55 | 0.87 |
| PINN I | 4351.05 | 65.96 | 53.43 | 2.27 | 0.90 |
| PINN II | 3438.58 | 58.64 | 46.61 | 2.02 | 0.92 |
4. Discussion
5. Conclusions
- (1)
- The proposed jacking force calculation model improves prediction accuracy, particularly for long-distance pipe jacking, significantly reducing cumulative error.
- (2)
- Adversarial training enhances predictive performance, with the DANN framework effectively capturing domain shifts in different construction sections.
- (3)
- The PIDANN model outperforms the purely data-driven DANN model, achieving 36.9% and 20.2% lower mean squared error (MSE) on the new test set, indicating reduced overfitting and improved generalization.
- (4)
- PIDANN successfully transfers knowledge across different data sources, leading to superior prediction accuracy compared to non-transfer learning machine learning methods.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zhang, B.; Liu, J. Study on safety of existing rail transit tunnel undercrossing with pipe jacking method. J. Saf. Sci. Technol. 2023, 19, 162–167. [Google Scholar] [CrossRef]
- Hong, K. Development and Prospects of Tunnels and Underground Works in China in Recent Two Years. Tunn. Constr. 2017, 37, 123–134. [Google Scholar] [CrossRef]
- Li, P.; Dai, Z.; Huang, D.; Cai, W.; Fang, T. Impact Analysis for Safety Prevention and Control of Special-Shaped Shield Construction Closely Crossing Multiple Operational Metro Tunnels in Shallow Overburden. Geotech. Geol. Eng. 2022, 40, 2127–2144. [Google Scholar] [CrossRef]
- Haslem, R. Pipe jacking forces: From theory to practice. In Proceedings of ICE North Western Association Centenary Conference in Infrastructure Renovation and Waste Control, Manchester, UK, 8–10 April 1986; pp. 173–180. [Google Scholar]
- Oreilly, M.; Rogers, D. Pipe jacking forces. In Proceedings of the International Conference on Foundations and Tunnels, London, UK, 24–26 March 1987; pp. 201–208. [Google Scholar]
- Bennett, R.D. Jacking Loads and Ground Deformations Associated with Microtunneling; University of Illinois at Urbana-Champaign: Champaign, IL, USA, 1998. [Google Scholar]
- GB 50268-2008; Specification for Construction and Acceptance of Water Supply and Drainage Pipeline Projects. Beijing Municipal Construction Group Co., Ltd.: Beijing, China, 2008; 255P, p. A255.
- Milligan, G.W.E.; Norris, P. Pipe–soil interaction during pipe jacking. Geotech. Eng. 1999, 137, 27–44. [Google Scholar] [CrossRef]
- Saeid, K.; Hideki, S.; Kikuo, M. Analysis and prediction of thrust in using slurry pipe jacking method Tunn. Undergr. Space Technol. Inc. Trenchless Technol. Res. 2004, 19, 356. [Google Scholar]
- Ji, Q.; Zixuan, Z.; Xiaohui, W.; Mengjie, S.; Tianjiao, P. Research on Interpretable Methods of Machine Learning Applied in Intelligent Analysis of Power System (Part II): Physics-embedded Machine Learning for Power System Stability Analysis. Proc. CSEE 2023, 43, 9046–9059. [Google Scholar] [CrossRef]
- Peerun, M.I.; Ong, D.E.L.; Desha, C. A strategic review on enhanced DEM simulation and advanced 3-D particle printing techniques to improve pipe-jacking force prediction. Tunn. Undergr. Space Technol. Inc. Trenchless Technol. Res. 2022, 123, 104415. [Google Scholar] [CrossRef]
- Zhang, W.; Li, H.; Li, Y.; Liu, H.; Chen, Y.; Ding, X. Application of deep learning algorithms in geotechnical engineering: A short critical review. Artif. Intell. Rev. 2021, 54, 5633–5673. [Google Scholar] [CrossRef]
- Wang, L.; Yi, S.; Yu, Y.; Gao, C.; Samali, B. Automated ultrasonic-based diagnosis of concrete compressive damage amidst temperature variations utilizing deep learning. Mech. Syst. Signal Process. 2024, 221, 111719. [Google Scholar] [CrossRef]
- Yu, Y.; Zhang, C.; Xie, X.; Yousefi, A.M.; Zhang, G.; Li, J.; Samali, B. Compressive strength evaluation of cement-based materials in sulphate environment using optimized deep learning technology. Dev. Built Environ. 2023, 16, 100298. [Google Scholar] [CrossRef]
- Han, Y.; Wang, Y.; Liu, C.; Hu, X.; Du, L. Application of regularized ELM optimized by sine algorithm in prediction of ground settlement around foundation pit. Environ. Earth Sci. 2022, 81, 413. [Google Scholar] [CrossRef]
- Hu, D.; Hu, Y.; Yi, S.; Liang, X.; Li, Y.; Yang, X. Surface Settlement Prediction of Rectangular Pipe-Jacking Tunnel Based on the Machine-Learning Algorithm. J. Pipeline Syst. Eng. Pract. 2024, 15, 04023061. [Google Scholar] [CrossRef]
- Zhou, H.; Huang, S.; Zhang, P.; Ma, B.; Ma, P.; Feng, X. Prediction of jacking force using PSO-BPNN and PSO-SVR algorithm in curved pipe roof. Tunn. Undergr. Space Technol. 2023, 138, 105159. [Google Scholar] [CrossRef]
- Dai, Z.; Li, P.; Liu, J.; Liu, X.; Rui, Y.; Zhai, Y. Data-driven prediction for curved pipe jacking performance during underwater excavation of ancient shipwreck using an attention-based graph convolutional network approach. Expert Syst. Appl. 2024, 236, 121393. [Google Scholar] [CrossRef]
- Liu, Y.; Hou, S.; Cheng, L.; Huang, Y. Advances and key technologies of intelligent construction of hydraulic engineering. Water Resour. Hydropower Eng. 2022, 53, 1–20. [Google Scholar] [CrossRef]
- Ganin, Y.; Ustinova, E.; Ajakan, H.; Germain, P.; Larochelle, H.; Laviolette, F.; March, M.; Lempitsky, V. Domain-adversarial training of neural networks. J. Mach. Learn. Res. 2016, 17, 1–35. [Google Scholar]
- Farbiz, F.; Habibullah, M.S.; Hamadicharef, B.; Maszczyk, T.; Aggarwal, S. Knowledge-embedded machine learning and its applications in smart manufacturing. J. Intell. Manuf. 2023, 34, 2889–2906. [Google Scholar] [CrossRef]
- Rueden, L.V.; Mayer, S.; Beckh, K.; Georgiev, B.; Giesselbach, S.; Heese, R.; Kirsch, B.; Pfrommer, J.; Pick, A.; Ramamurthy, R.; et al. Informed Machine Learning—A Taxonomy and Survey of Integrating Prior Knowledge into Learning Systems. IEEE Trans. Knowl. Data Eng. 2023, 35, 614–633. [Google Scholar] [CrossRef]
- Oz, B.; Karalar, M. A Consensus-Based Likert–LMBP Model for Evaluating the Earthquake Resistance of Existing Buildings. Appl. Sci. 2024, 14, 6492. [Google Scholar] [CrossRef]
- Raissi, M.; Perdikaris, P.; Karniadakis, G.E. Physics-informed neural networks: A deep learning framework for solving forward and inverse problems involving nonlinear partial differential equations. J. Comput. Phys. 2019, 378, 686–707. [Google Scholar] [CrossRef]
- Yu, B.; Gan, Z.; Zhang, S.; Gu, Y.; Yao, W. Prediction of 2D/3D unsteady-state tempertayure fieldsamd heat sources upon the physics-informed neural networks. Eng. Mech. 2023, 1–13. [Google Scholar] [CrossRef]
- Xu, J.; Zhu, H.; Zhu, J.; Li, C. Solution approach of Burgers-Fisher equation based onphysics-informed neural networks. J. Zhejiang Univ. Eng. Sci. 2023, 57, 2160–2169. [Google Scholar] [CrossRef]
- Chen, Z.; Lai, S.-K.; Yang, Z. AT-PINN: Advanced time-marching physics-informed neural network for structural vibration analysis. Thin-Walled Struct. 2024, 196, 111423. [Google Scholar] [CrossRef]
- Liao, W.; Long, X.; Jiang, C. A physics-informed neural network method for identifying parameters and predicting remaining life of fatigue crack growth. Int. J. Fatigue 2025, 191, 108678. [Google Scholar] [CrossRef]
- Wang, J.; Zhang, D.; Chen, J.; Fang, Q.; Sun, Z.; Lu, S. A novel mechanics model for predicting vertical load and jacking force via rectangle pipe considering soil arching effect. Tunn. Undergr. Space Technol. 2024, 152, 105952. [Google Scholar] [CrossRef]
- Lin, X.-T.; Chen, R.-P.; Wu, H.-N.; Meng, F.-Y.; Su, D.; Han, K. Calculation of earth pressure distribution on the deep circular tunnel considering stress-transfer mechanisms in different zones. Tunn. Undergr. Space Technol. 2022, 119, 104211. [Google Scholar] [CrossRef]
- Hou, J.; Xiao, C.; Li, j.; Zhi, B.; Li, J. A mechanical model of the pipe section construction process considering the Interaction of pipe-soil-slurry. Chin. J. Undergr. Space Eng. 2023, 19, 767–776. [Google Scholar]
- Ciavarella, M.; Decuzzi, P. The state of stress induced by the plane frictionless cylindrical contact. I. The case of elastic similarity. Int. J. Solids Struct. 2001, 38, 4507–4523. [Google Scholar] [CrossRef]
- Ye, Y.; Peng, L.; Zhou, Y.; Yang, W.; Shi, C.; Lin, Y. Prediction of Friction Resistance for Slurry Pipe Jacking. Appl. Sci. 2020, 10, 207. [Google Scholar] [CrossRef]
- Zhang, P.; Tan, L.; Ma, B. Formulae for frictional resistance considering mud thixotropy and pipe-soil contact characteristics. Chin. J. Geotech. Eng. 2017, 39, 2043–2049. [Google Scholar] [CrossRef]
- Zhang, P.; Ma, B.; Zeng, C.; Tan, L. Numerical model for jacking force based on pipe-soil contact characteristies. Chin. J. Geotech. Eng. 2017, 39, 244–249. [Google Scholar] [CrossRef]
- Wang, S.; Xia, C.; Ge, J. Formulae oflateral friction resistance for pipe-jackingconsidering different forms of mud screen. Rock Soil Mech. 2014, 35, 159–166+174. [Google Scholar] [CrossRef]
- Zhu, H.; Jia, Z.; Li, Q. CNN-based fault location of distributionnetwork. Water Resour. Power 2021, 39, 188–191. [Google Scholar]
- Wang, X.; Li, K.; Zhang, Z.; Yu, H.; Kong, L.; Chen, W. Coupled ALO-LSTM and feature attention mechanism prediction model for seepage pressure of earth-rock dam. J. Hydraul. Eng. 2022, 53, 403–412. [Google Scholar] [CrossRef]
- Zhang, S.; Shu, H.; Liu, X.; Huang, S.; Zhou, H. Investigating on intelligent classification of surrounding rock for horizontal directional bore hole based on machine learning. Yangtze River 2023, 54, 156–165. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, Y.; Liu, Y.; Zhang, J.; Zhang, Z.; Li, Q. Jacking Force Prediction for Long-Distance Pipe by Integrating Physical Information and Adversarial Learning Mechanism. Buildings 2025, 15, 1337. https://doi.org/10.3390/buildings15081337
Yang Y, Liu Y, Zhang J, Zhang Z, Li Q. Jacking Force Prediction for Long-Distance Pipe by Integrating Physical Information and Adversarial Learning Mechanism. Buildings. 2025; 15(8):1337. https://doi.org/10.3390/buildings15081337
Chicago/Turabian StyleYang, Yaohong, Yuxiang Liu, Junhua Zhang, Zhe Zhang, and Qunsheng Li. 2025. "Jacking Force Prediction for Long-Distance Pipe by Integrating Physical Information and Adversarial Learning Mechanism" Buildings 15, no. 8: 1337. https://doi.org/10.3390/buildings15081337
APA StyleYang, Y., Liu, Y., Zhang, J., Zhang, Z., & Li, Q. (2025). Jacking Force Prediction for Long-Distance Pipe by Integrating Physical Information and Adversarial Learning Mechanism. Buildings, 15(8), 1337. https://doi.org/10.3390/buildings15081337