3.1. Quasi-Elastic–Plastic Analysis Method for Reinforced Concrete Structures
Assume that the structure remains in an elastic state. Through elastic analysis, the maximum bending moment of the structural member section under rare earthquake loads can be obtained. According to the equal energy criterion proposed by Veletsos and Newmark [
29], under the maximum response displacement, the maximum potential energy of the elastic system and the elastoplastic system are equal. Herein, the equivalent stiffness of the structural member in the elastoplastic state is calculated to obtain the stiffness reduction factor of the member.
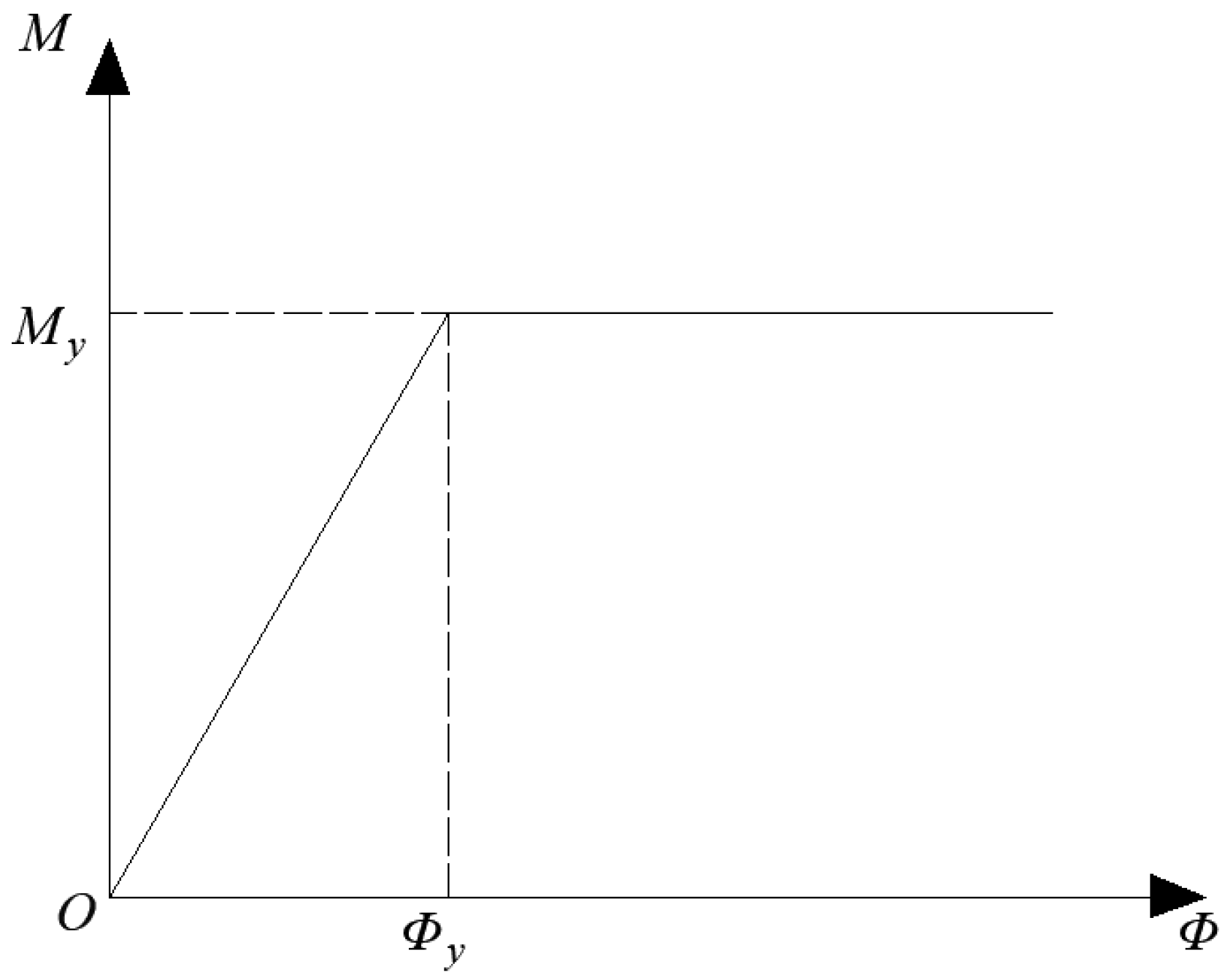
The moment–rotation model of the reinforced concrete member is simplified to a bilinear model, assuming that the curve remains horizontal after the member yields. The moment–rotation curve of the ideal elastoplastic member is shown in
Figure 3, and the energy equivalence process is shown in
Figure 4.
is the yield bending moment of the member;
is the yield rotation of the member;
is the bending moment of the member calculated using the elastic method during the
-th iteration;
is the elastic rotation of the member during the
-th iteration;
is the plastic rotation of the member during the
-th iteration;
is the reduced stiffness of the member during the
-th iteration; and
is the reduced stiffness of the member during the
-th iteration.
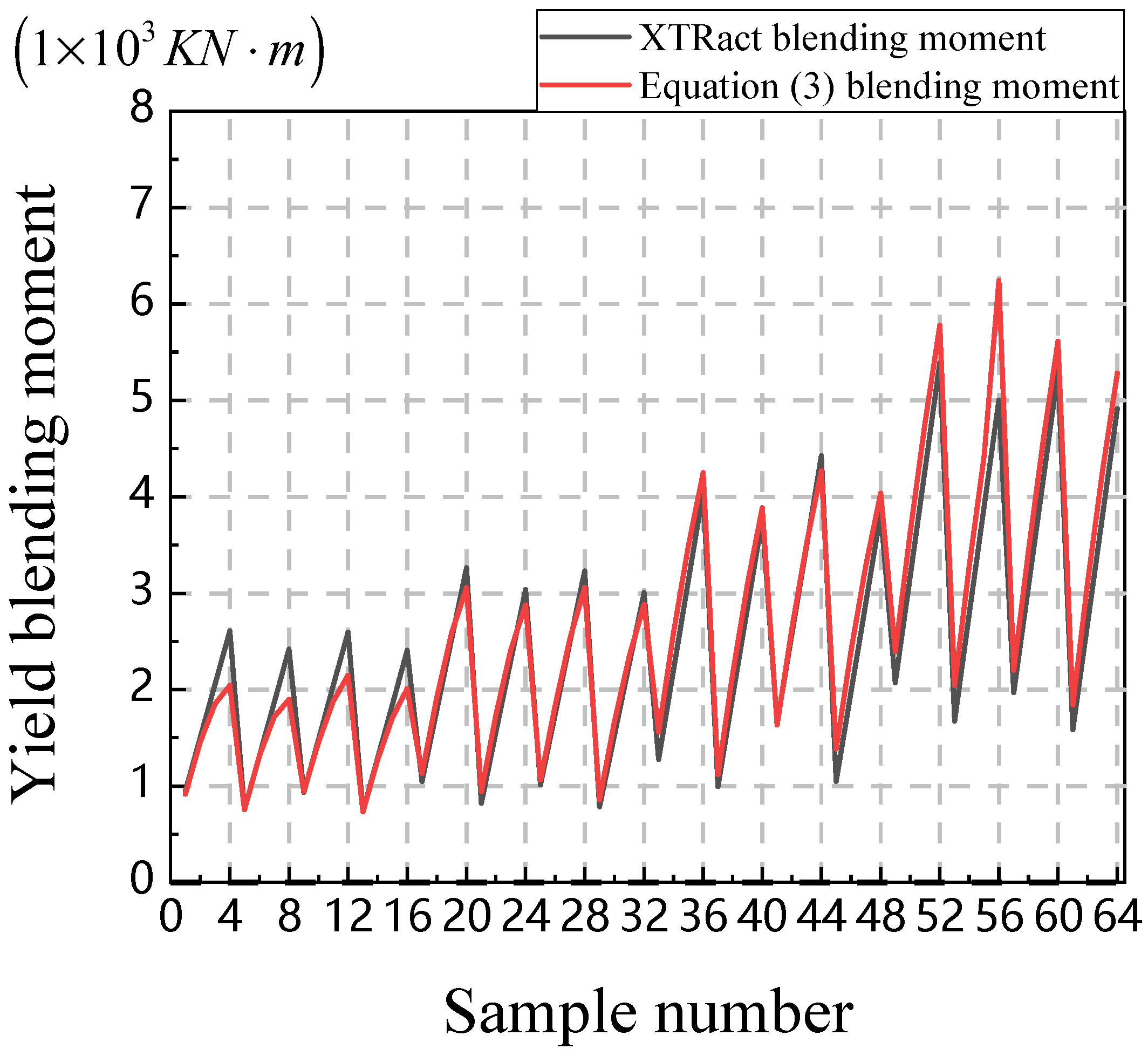
Based on the principle of equal strain energy [
29], in both elastic and ideal elastoplastic states, the potential energy of structural components is equal, which can be represented as
as in
Figure 4. Therefore, the limit state point
and the corresponding rotation angle
can be determined.
When , the component has not yielded, and , where represents the initial stiffness of the component.
Assuming that the curvature of the component in the equivalent elastic state is equal to the curvature in the elastoplastic state, and based on the equivalence between the energy of the member in the ideal elastoplastic state and the energy corresponding to the maximum deformation under corrected stiffness in elastic analysis (i.e.,
), the stiffness after elastoplastic deformation (i.e.,
) can be determined.
The stiffness reduction factor
is defined as the ratio of the reduced stiffness to the initial elastic stiffness, as shown in Equation (8). The stiffness reduction factor reflects the current damage state of the component. If the component has not yielded, then
.
Due to the stiffness reduction, the internal force distribution of the structure changes accordingly, leading to a variation in the stiffness reduction factors for the components based on the internal forces. Therefore, multiple iterations are required until convergence, ensuring that the stiffness reduction values of each component match their respective load conditions. In practical operations, the structural model should first be established, and the internal forces of the components should be calculated using the response spectrum method. Next, the stiffness reduction factors for each component are determined, followed by the reduction in the elastic modulus for each component based on these factors to obtain the equivalent model. This process is repeated for the equivalent model until convergence. In this way, the performance information of the structure after entering the elastoplastic state under rare seismic actions can be estimated under elastic analysis conditions. Finally, the automation of the proposed quasi-elastic–plastic analysis method was achieved based on the ETABS OAPI.
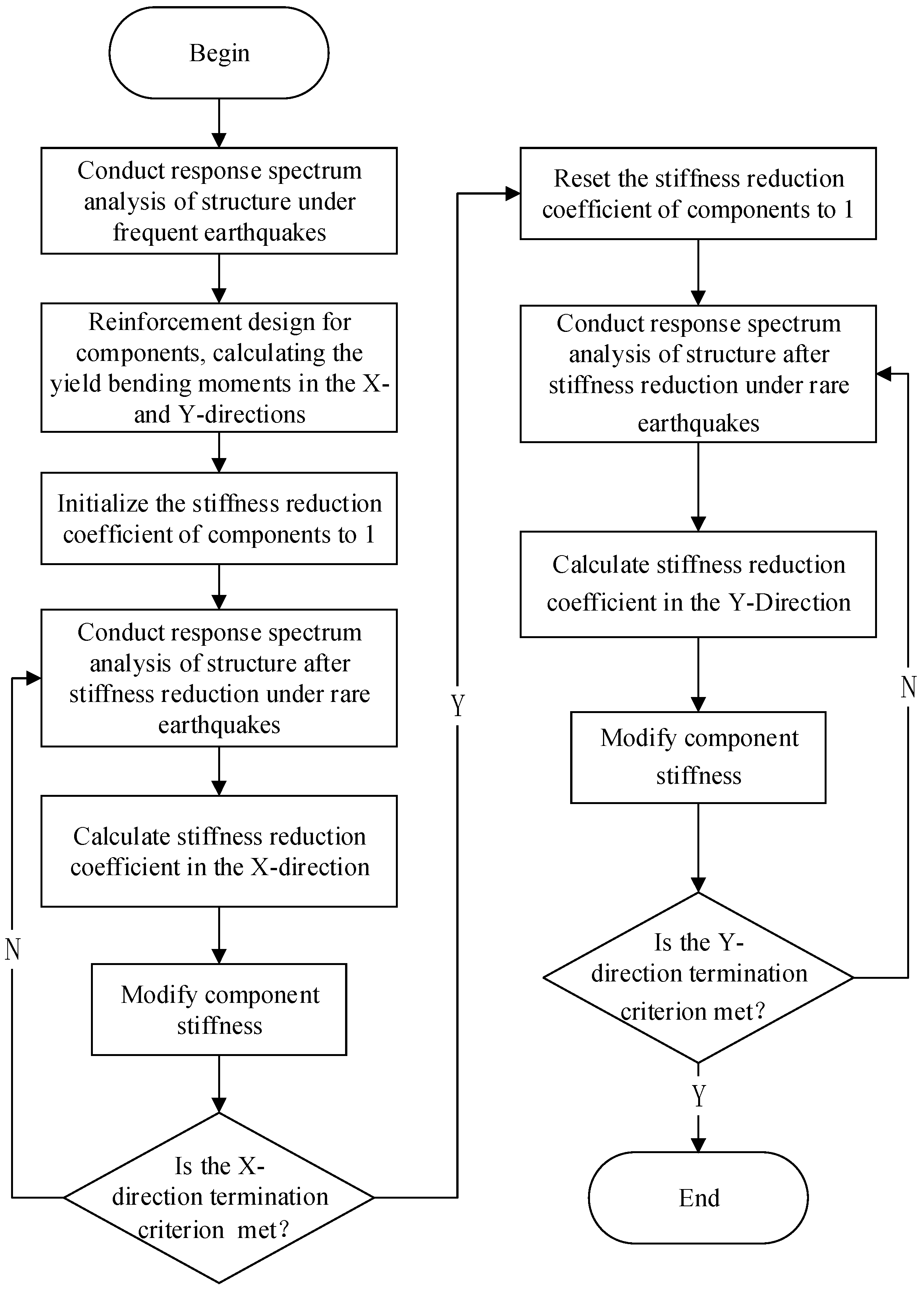
The flowchart of the proposed quasi-elastic–plastic analysis method is shown in
Figure 5, and the specific process is as follows.
- (1)
Calculate the frequent earthquake condition in the X-direction, complete the design of reinforcement for the components, and calculate the yield bending moment of each component.
- (2)
Set the stiffness reduction factor for all components to 1.
- (3)
Calculate the rare earthquake condition in the X-direction. Assume all components are elastic and use the elastic response spectrum method to calculate the maximum bending moment and axial force of each component under the condition of ‘1.0 dead load + 0.5 live load + seismic load’.
- (4)
Calculate the stiffness reduction factor for each component. For components with bending moments exceeding the yield bending moment, reduce the stiffness by lowering the elastic modulus of the material and modify the structural model accordingly.
- (5)
Repeat steps (2)–(5) until the termination criteria are met. The termination criterion is that the change in the stiffness reduction factor of all components between two consecutive iterations is less than 5%.
- (6)
Initialize the structural model and calculate the seismic effects in the Y-direction using the same method.
3.2. Elastoplastic Optimization Model for Reinforced Concrete Frame–Shear Wall Structures
Based on the quasi-elastic–plastic analysis method for reinforced concrete structures, a quasi-elastic–plastic optimization method for reinforced concrete structures is introduced. The cross-sectional dimensions of beams, columns, and walls are used as variables, with the section numbers from the section library serving as the range of variable changes. The optimization design variables are defined as:
where
represents the vector of section numbers;
represents the section number variables for the
-th group of components;
and
are the upper and lower limits of the section number for the
-th group of components, respectively. For the convenience of subsequent optimization, the section number vector
is standardized according to Equations (10) and (11). In this chapter, the design variables do not include the reinforcement ratio of the components, as the reinforcement design is completed by ETABS according to the code requirements.
The optimization model can be obtained as follows:
where
is the cost of the structure,
is the standardized vector;
represents the structural performance constraint values that must be met during the elastic and elastoplastic design stages, and their calculation method is determined by Equation (13).
is the constraint value for the
-th structural performance indicator;
is the value of the
-th performance indicator, and
is the limit value for the
-th performance indicator, as specified by the code [
27]. The relationship between the names of performance indicators, their corresponding indicator numbers, and limit values is shown in
Table 2. The optimization objective is to obtain the component dimensions with the smallest
value, while satisfying the performance indicators during the elastic design phase and the story drift constraints during the elastoplastic design phase.
3.3. Structural Dimension Optimization Process Based on Particle Swarm Optimization Method
Particle swarm optimization (PSO) is a heuristic algorithm inspired by the process of bird flocking and foraging. Through the exchange of information among multiple particles, all particles move towards better directions, gradually converging to the global optimum. In the PSO algorithm, particles can quickly adjust their search direction and speed by sharing information about their individual best positions and the global best position [
30]. This allows them to move closer to better solutions, thereby achieving rapid convergence. In contrast, in the Genetic Algorithm (GA), there is less information exchange between individuals, which mainly rely on crossover and mutation operations to exchange information [
31]. This method may lead to slower information propagation and affect the convergence speed. The fundamental principle of the PSO algorithm is as follows:
Let the number of variables be
and the number of particles be
. In the
-th iteration step, the position vector
and velocity vector
of the
-th particle are given by Equations (14) and (15). Here,
and
represent the
-th component position and velocity, respectively. The position vector
at time
is obtained by the linear combination of
and
, as shown in Equation (16).
The particle swarm optimization algorithm requires a fitness evaluation function to assess the adaptability of each position vector, thus determining its quality. The fitness function
is determined by the structural cost
and the constraint violation coefficient
, and is defined as follows:
When all constraints are within the limits, , the fitness function value equals the structural cost . When any constraint is violated, , a penalty is applied to the fitness function, with being the penalty factor. In this study, the penalty factor was set to 100 to ensure that the fitness function receives sufficient penalty when constraints are violated. Among different positions, the comparison shows that the smaller is, the better the position.
In the optimization process, the velocity vector
is influenced by the global best position
from the previous iteration and the individual best position
found by the
-th particle, and can be calculated using Equation (19). Here,
is the inertia factor, indicating the degree of retention of the previous velocity. A larger
leads to a broader search range, suitable for global search in the early optimization stages; a smaller
causes the algorithm to be more influenced by the historical best position, resulting in a narrower search range, suitable for local search in later stages. Therefore, the value of
decreases as the iteration count
increases, and is typically calculated using Equation (20), where
and
represent the maximum and minimum values of the inertia factor, respectively, and
is the maximum number of iterations.
and
are the individual and global learning factors, respectively, reflecting the influence of the individual and global historical best positions on the direction of particle movement.
and
are random values within the range
, increasing the randomness of the search and enhancing the global search capability of the algorithm.
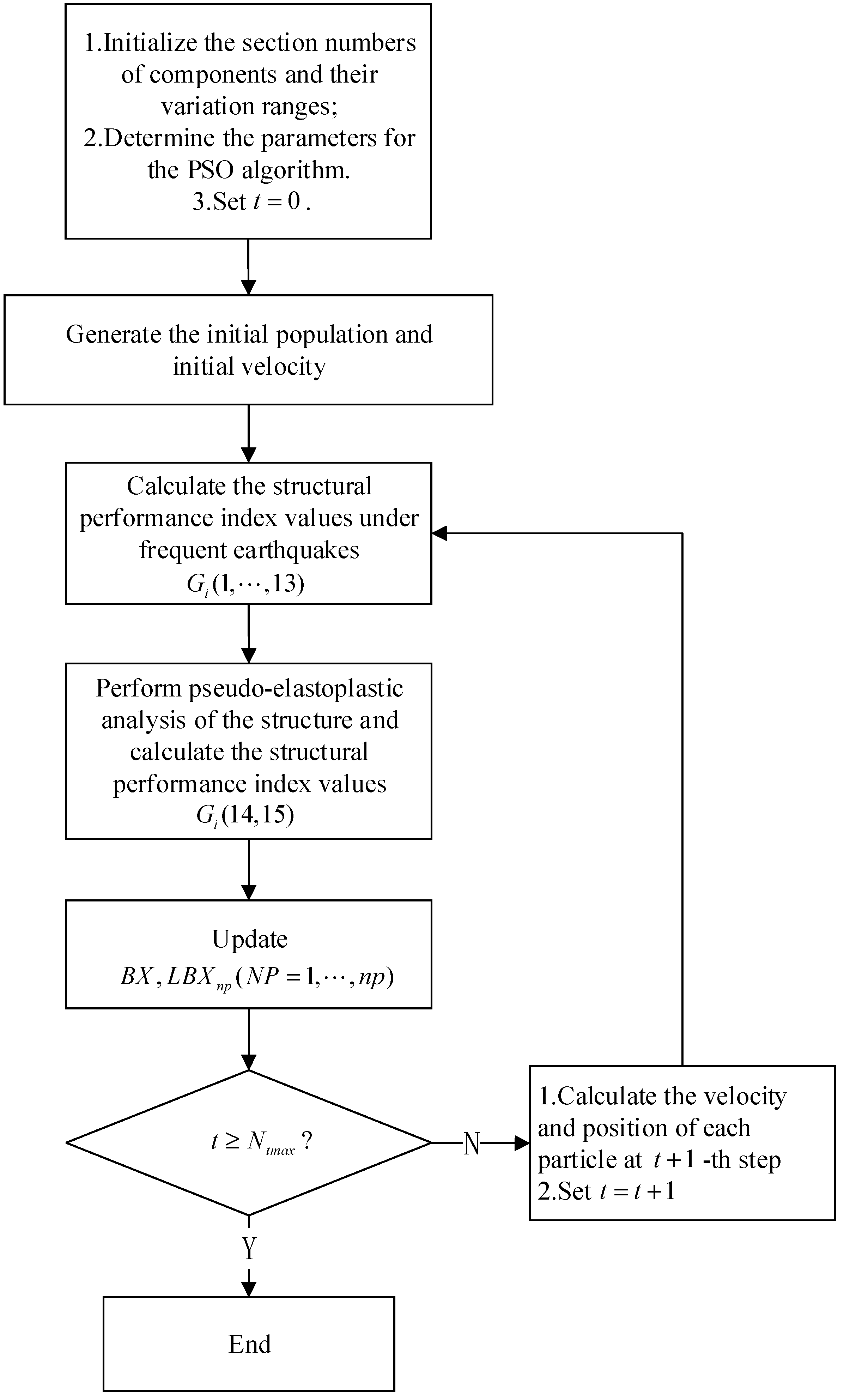
The process for reinforced concrete structure cross-sectional dimension optimization based on the PSO is as follows.
(1) Determine the parameters of the PSO algorithm. Set the number of particles to 20, the maximum number of iterations to 20, the maximum and minimum inertia weights and to 0.5, the individual and group learning factors and to 1.3, and the maximum velocity to 0.5. Obtain the number of variables , and set the iteration counter .
(2) Randomly generate the initial population and initial velocity .
(3) Based on
, derive
structural dimension design schemes. For the
-th particle, the conversion between its position information
and the component size number vector
is defined by Equation (21), where
round( ) represents the rounding operation.
Use to modify the model, perform response spectrum analysis under frequent earthquakes, and quasi-elastic–plastic analysis under rare earthquakes. Calculate the constraint value for each particle, and determine the current fitness function of each particle based on Equations (17) and (18).
(4) Update the global historical best position and the individual historical best position . Calculate the velocity of each particle in iteration step , and update the position of each particle.
(5) If , it indicates that the algorithm has completed all optimization processes, and the current is the final optimization solution; otherwise, continue with the next step starting from step (3), and set . Extensive case studies conducted by the research team indicate that for general building structures, the number of iterations can be set to 20.
The quasi-elastic–plastic optimization flowchart for reinforced concrete structures is shown in
Figure 6.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}