
Equivalent Input Energy Velocity of Elastoplastic SDOF Systems with Specific Strength



Abstract
1. Introduction
2. Materials and Methods
2.1. Seismic Energy Demand
2.2. Ground Motions
2.3. Input Energy Spectrum
2.4. Sensitivity Analysis
2.5. Correlation Matrix
2.6. Probability Distribution of Equivalent Input Energy Velocity
2.7. t Test and ANOVA for Ry
2.8. t-Test and ANOVA for td
3. Results
3.1. Regression Analysis
3.2. Weighted Mean Error
3.3. Root Mean Squared Error
3.4. Coefficient of Variation of Error
4. Discussion
5. Conclusions
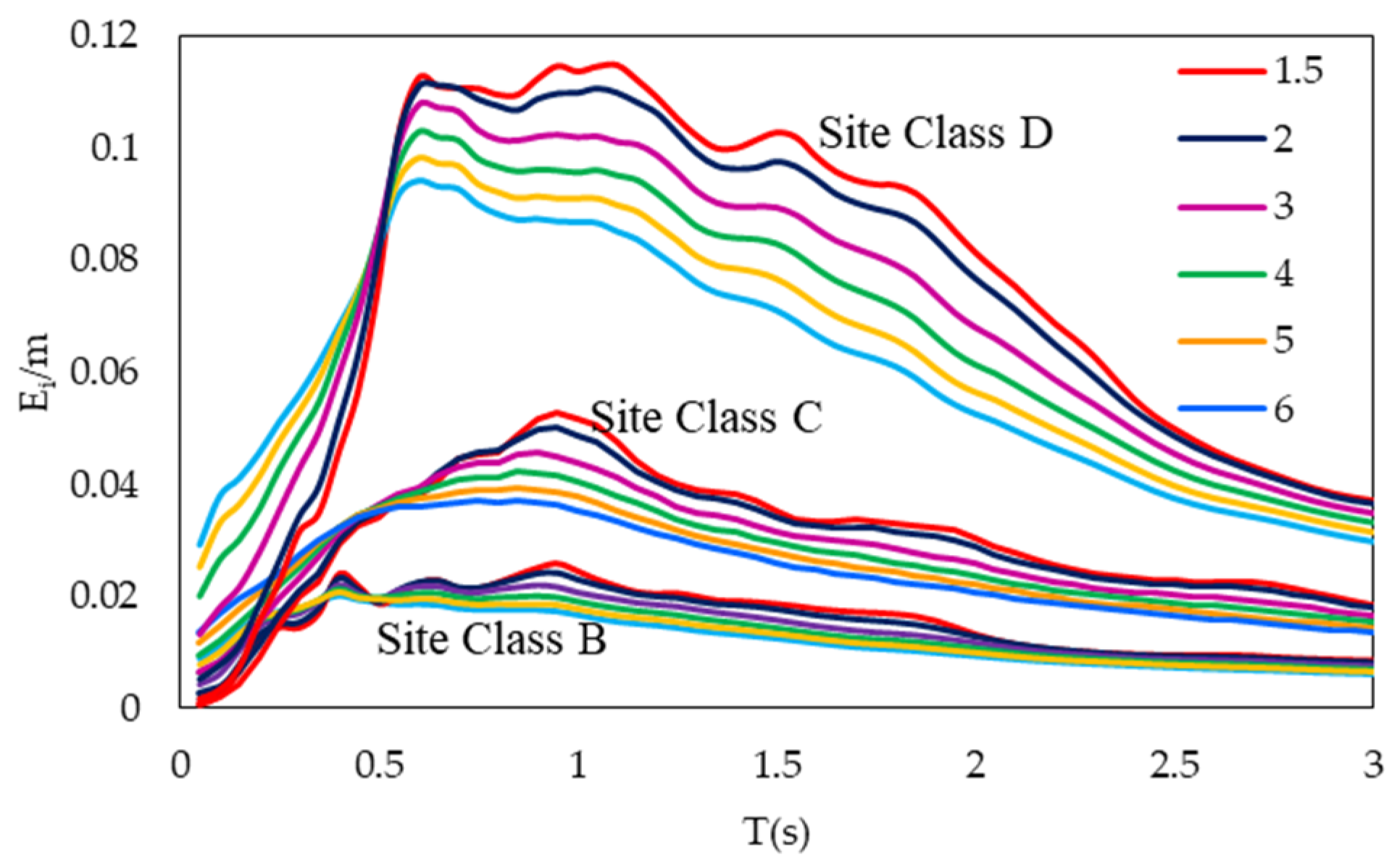
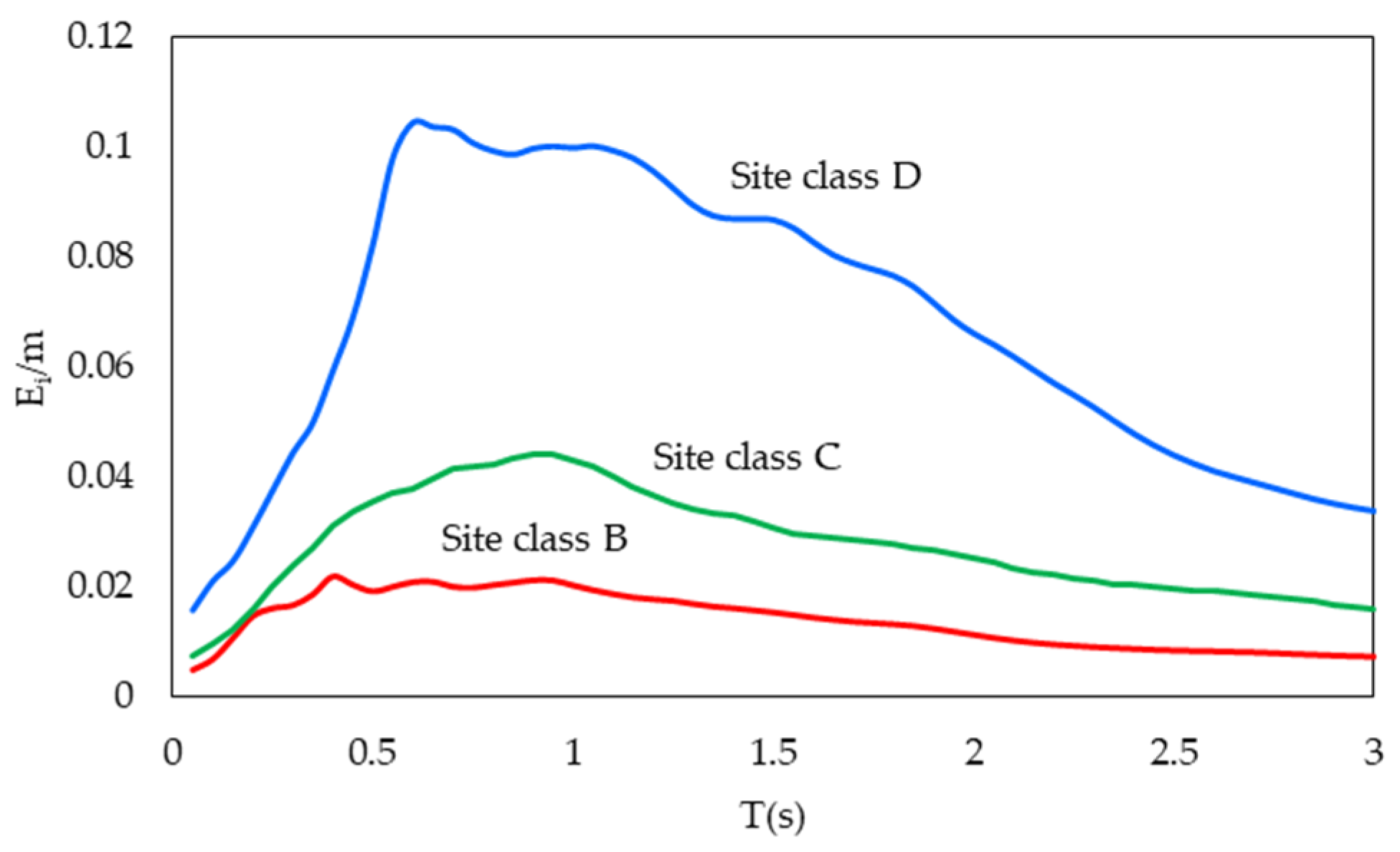
- The site class affects the input energy dissipated by an SDOF system. This effect influences the intensity rather than the shape of the input energy spectrum. Estimating the input energy velocity in terms of PSV helps to take this effect into consideration.
- Using normalized energy and period decreases the scatter at periods close to the characteristic period. (Figure 6)
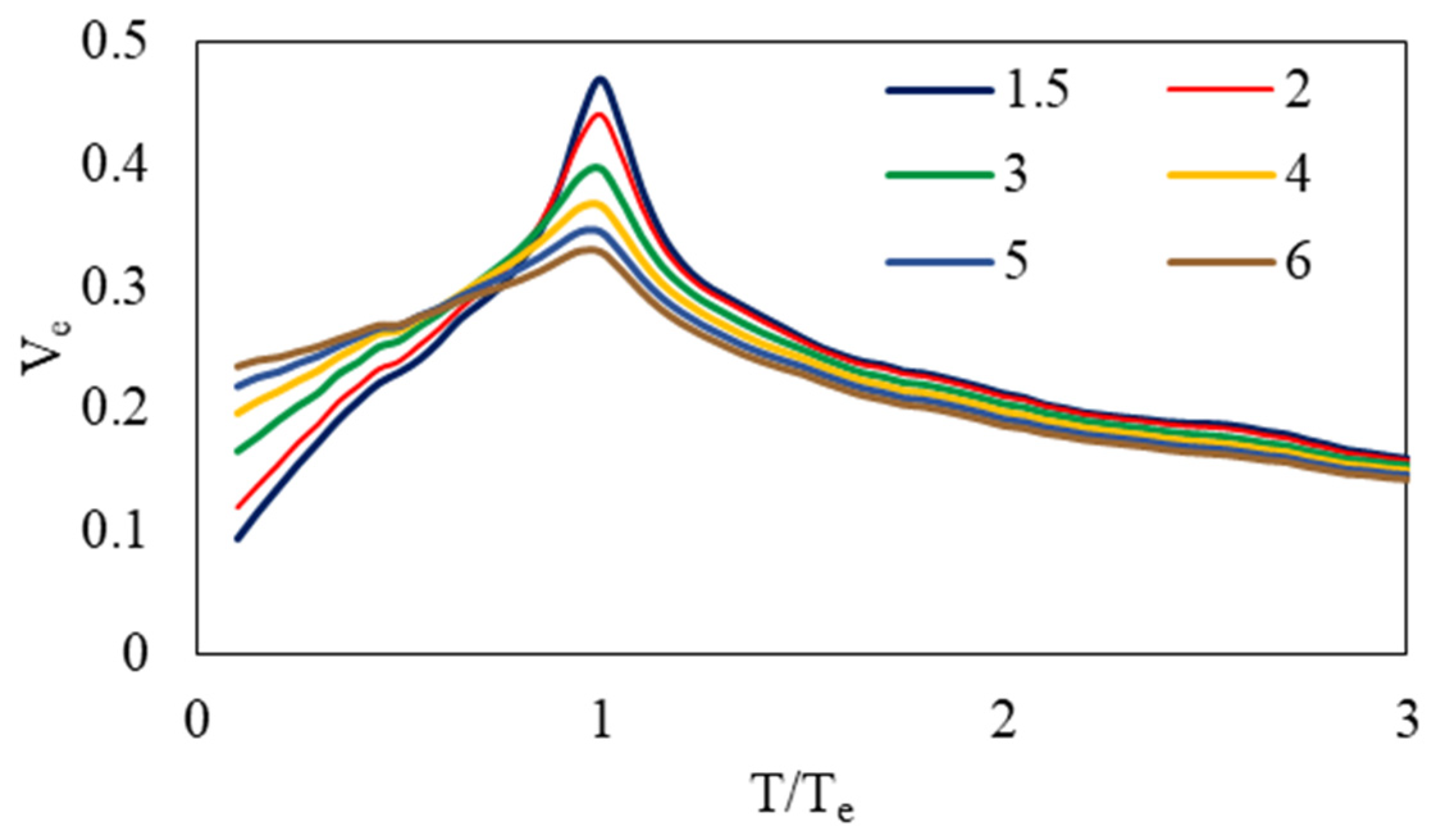
- The mean input energy velocity showed different trends in two spectral regions. It was observed that the input energy tends to decrease with increasing strength for systems with a period less than approximately 0.7 Te and tend to increase for systems whose period higher than 0.7 Te (Figure 8).
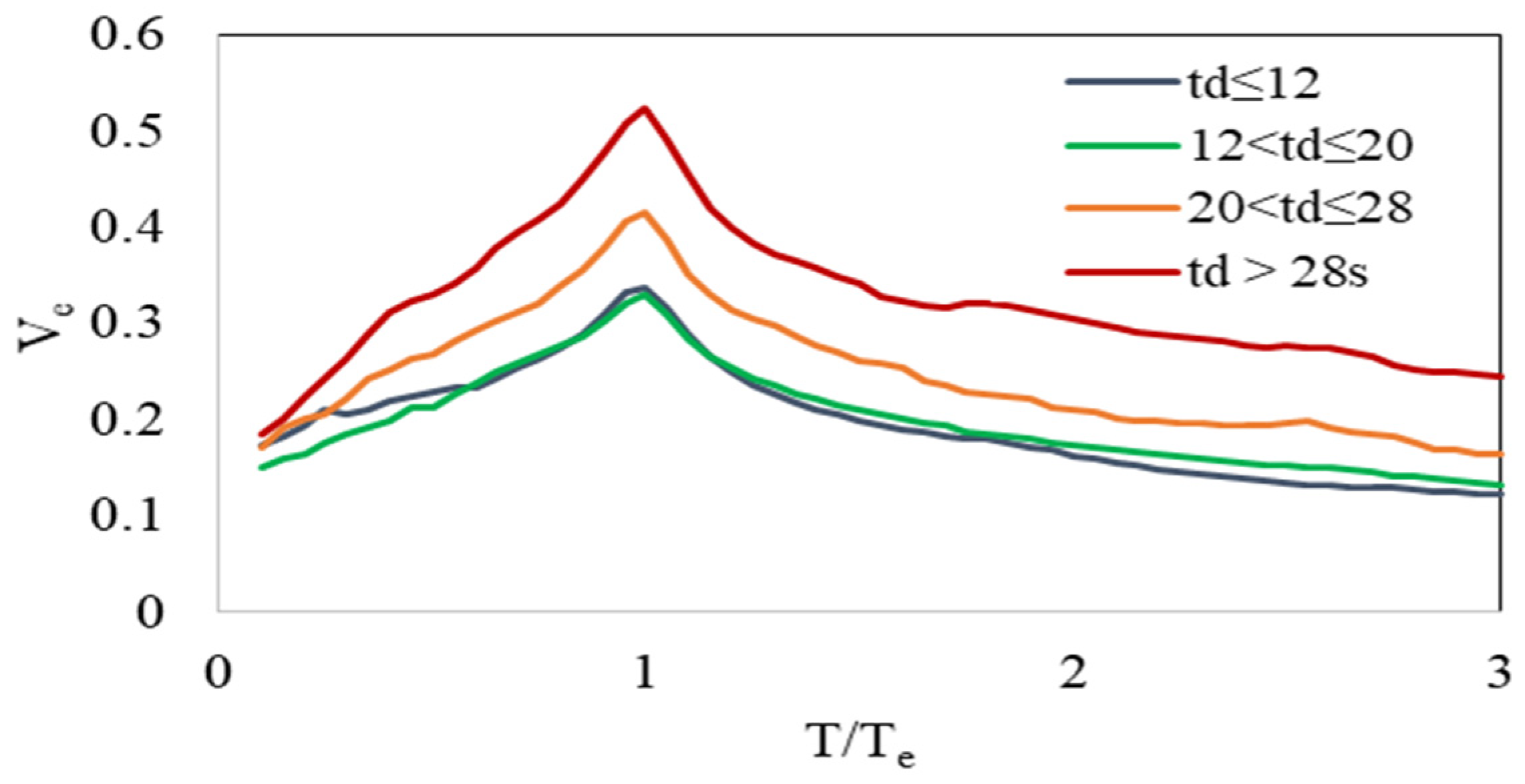
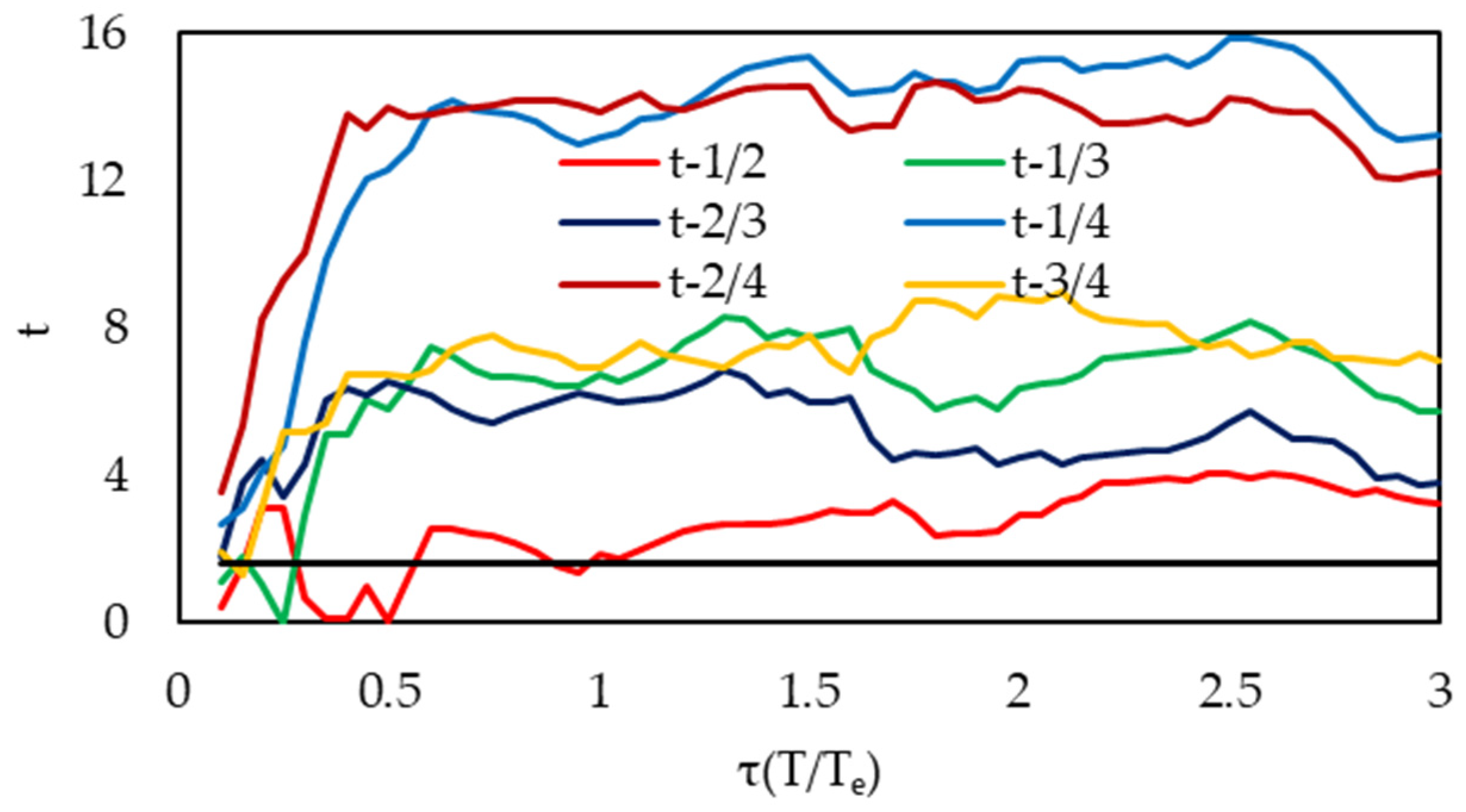
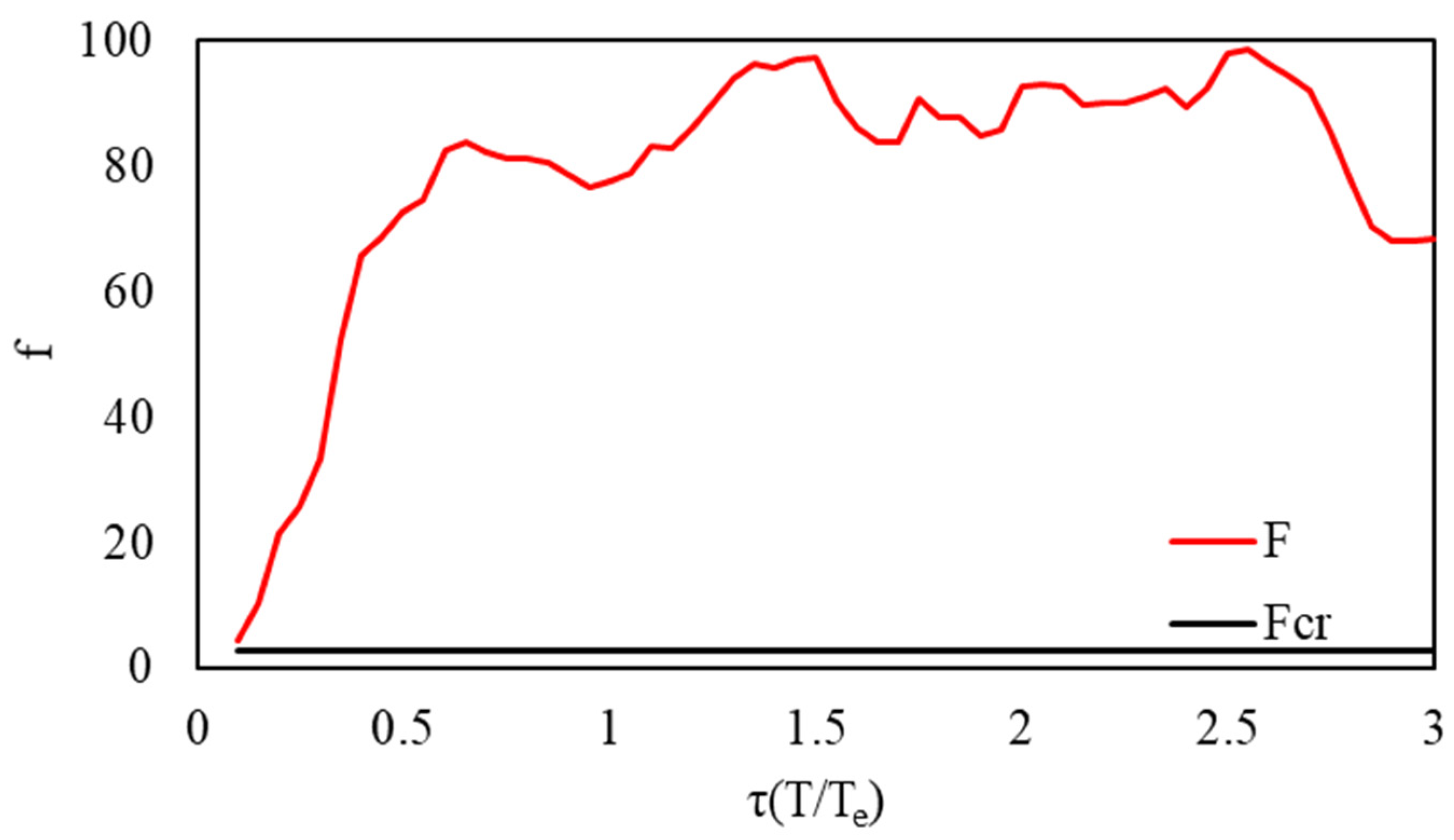
- Sensitivity analyses showed that the input energy velocity tends to increase on average as td increases. Furthermore, it was observed that the change in td is more effective on the input energy with increasing td (Figure 9).
- As seen from the correlation matrix, the spectrum intensity (SI) is more effective on input energy velocity than the other considered seismic parameters. The effect of spectrum intensity is taken into account in the estimation of input energy velocity by using an equation as a function of PSV, since spectrum intensity is the integration of PSV. Three different definitions of ground motion duration (td, td75, and tuni) have been considered, and their correlation coefficients are very close to each other. This result shows a similar effect of all the considered ground motion duration parameters on input energy velocity.
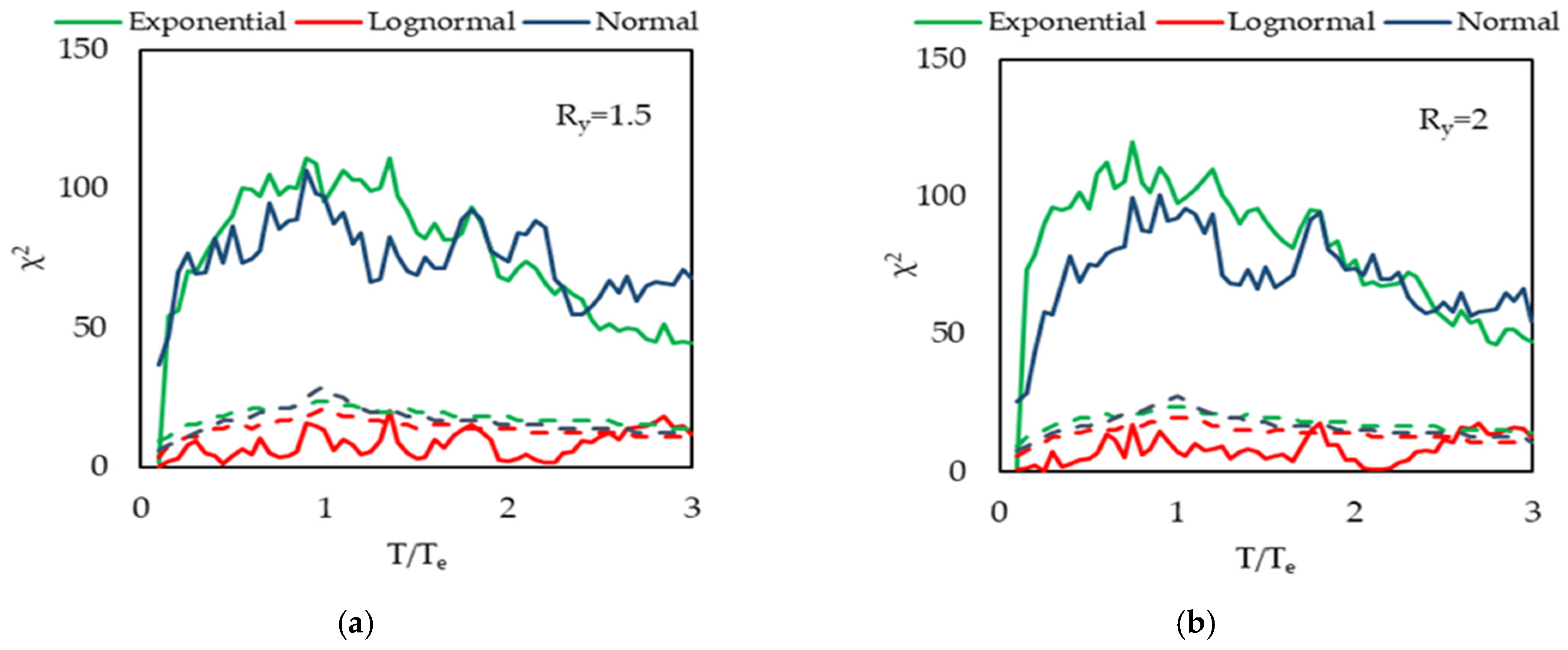
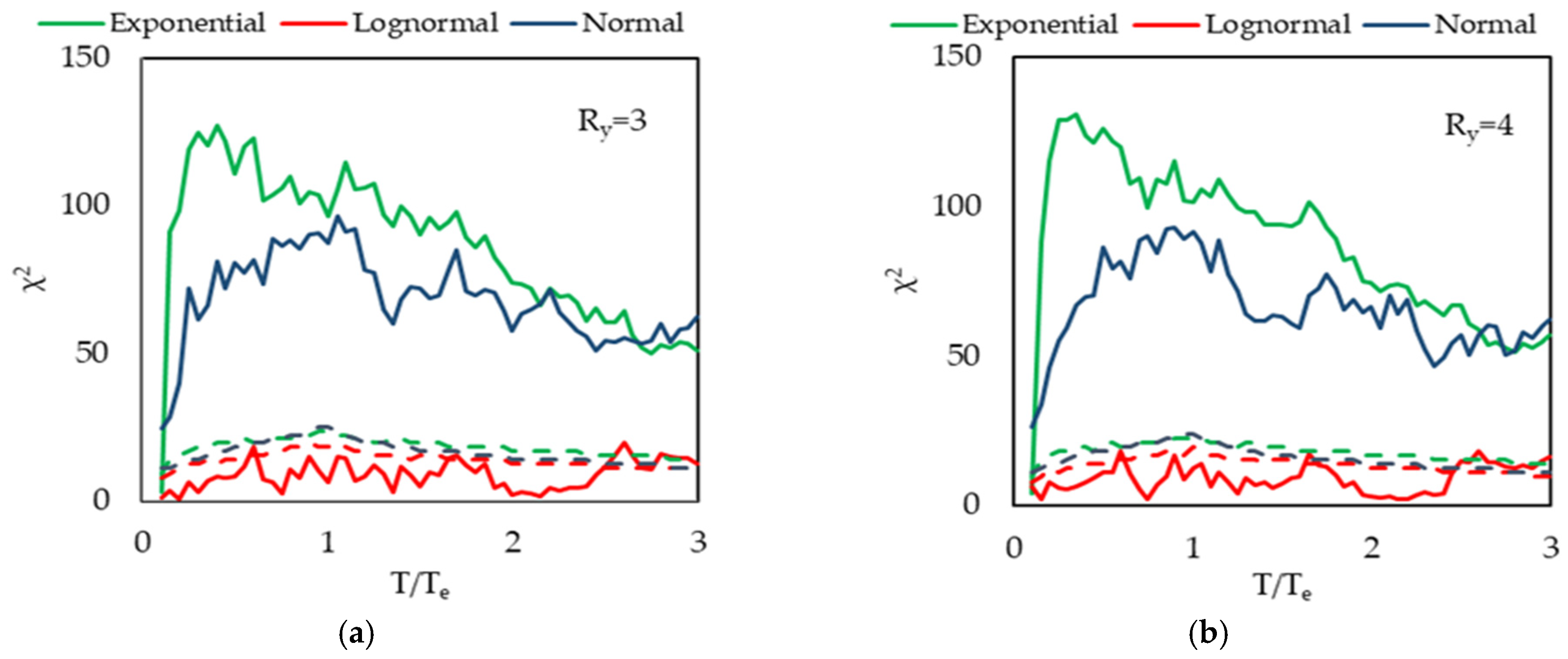
- The lognormal distribution was determined as the most reliable distribution model with the chi-square goodness-of-fit test for different strength reduction factor (Ry) and effective ground motion duration (td) groups, along the all T/Te ranges (Figure 10, Figure 11, Figure 12, Figure 13 and Figure 14). The lognormal distribution has been previously verified by other researchers [21].
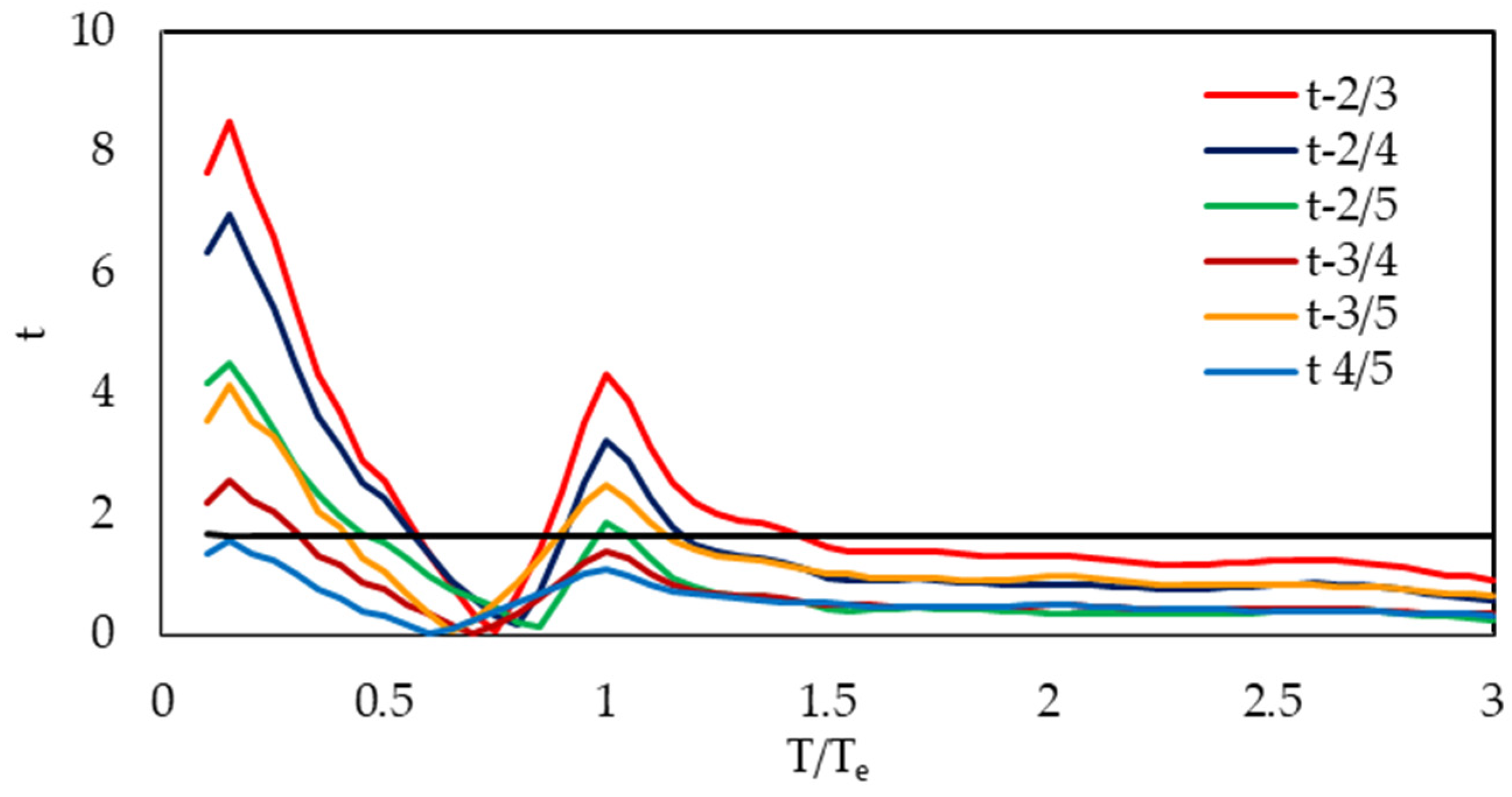
- The t-test and ANOVA results indicate that the mean Ve differs across different Ry groups over specific spectral ranges, except for group 4/5. According to hypothesis testing results at a 5% statistical significance level, strength influences input energy velocity within the ranges of 0.1Te < T < 0.6Te and 0.8Te < T < 1.5Te, except for group 4/5 (Figure 15 and Figure 16).
- Each considered Ry group, except group 4/5, has a threshold normalized period beyond which the effect of the strength reduction factor becomes negligible (0.35 s, 0.43 s, 0.45 s, and 0.6 s). The significant impact of strength on input energy velocity in the spectral region where the vibration period approximates the characteristic period suggests that it also plays a crucial role in determining the maximum input energy.
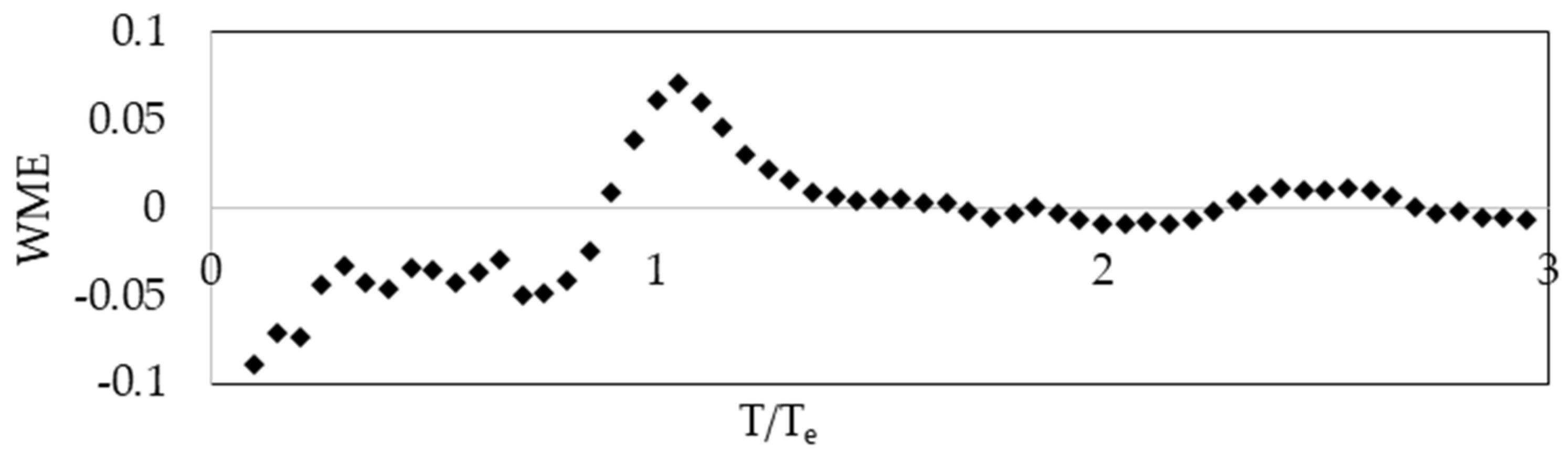
- The weighted mean error reaches the maximum value for very low periods (T < 0.3Te) and periods approximately equal to Te (Figure 20).
- The standard error of regression for estimating the input energy velocity is increasing with very low T/Te ratios (Figure 21).
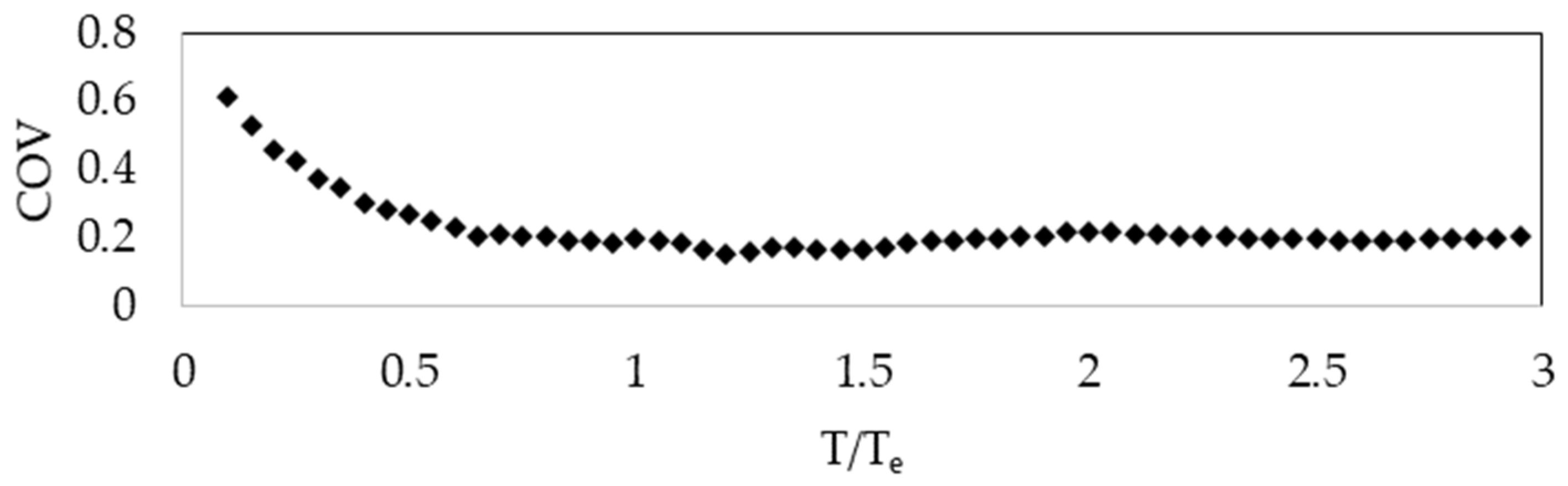
- The coefficient of variation for error of the proposed equation for estimating the input energy velocity is relatively higher in the short-period range (T < 0.5Te), and the dispersion increases in this region as the T/Te ratio decreases (Figure 22).
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A
| Event | Year | M *1 | Repc *2 | Site Class *3 | Vs30 *4 |
| Big Bear-01 | 1992 | 6.5 | 69 | B | 822 |
| Chi-Chi, Taiwan | 1999 | 7.6 | 173 | B | 1023 |
| Chi-Chi, Taiwan-05 | 1999 | 6.2 | 92 | B | 845 |
| Denali, Alaska | 2002 | 7.9 | 68 | B | 964 |
| Irpinia, Italy-01 | 1980 | 6.9 | 77 | B | 1000 |
| Loma Prieta | 1989 | 6.9 | 92 | B | 895 |
| Morgan Hill | 1984 | 6.2 | 39 | B | 1428 |
| Norcia, Italy | 1979 | 5.9 | 36 | B | 1000 |
| Northridge-01 | 1994 | 6.7 | 77 | B | 822 |
| San Fernando | 1971 | 6.6 | 39 | B | 969 |
| Sierra Madre | 1991 | 5.6 | 40 | B | 996 |
| Whittier Narrows-01 | 1987 | 6.0 | 28 | B | 1223 |
| Big Bear-01 | 1992 | 6.5 | 118 | C | 405 |
| Drama, Greece | 1985 | 5.2 | 47 | C | 660 |
| Kern County | 1952 | 7.4 | 126 | C | 415 |
| Landers | 1992 | 7.3 | 148 | C | 368 |
| Loma Prieta | 1989 | 6.9 | 98 | C | 597 |
| N. Palm Springs | 1986 | 6.1 | 60 | C | 685 |
| Northridge-01 | 1994 | 6.7 | 62 | C | 446 |
| San Fernando | 1971 | 6.6 | 75 | C | 446 |
| Whittier Narrows-01 | 1987 | 6.0 | 77 | C | 450 |
| Chi-Chi, Taiwan | 1999 | 7.6 | 116 | D | 273 |
| Dinar, Turkey | 1995 | 6.4 | 50 | D | 339 |
| Friuli, Italy-01 | 1976 | 6.5 | 90 | D | 275 |
| Imp. Valley-06 | 1979 | 6.5 | 84 | D | 345 |
| Irpinia, Italy-01 | 1980 | 6.9 | 52 | D | 275 |
| Kern County | 1952 | 7.4 | 118 | D | 316 |
| Kobe, Japan | 1995 | 6.9 | 136 | D | 256 |
| Kocaeli, Turkey | 1999 | 7.5 | 100 | D | 275 |
| Landers | 1992 | 7.3 | 75 | D | 271 |
| Lazio-Abruzzo, Italy | 1984 | 5.8 | 51 | D | 200 |
| Loma Prieta | 1989 | 6.9 | 94 | D | 249 |
| Manjil, Iran | 1990 | 7.4 | 87 | D | 275 |
| Morgan Hill | 1984 | 6.2 | 80 | D | 271 |
| *1 M: Moment magnitude of earthquake. *2 Repc: Distance from the recording site to the epicenter. *3 Site Class: NEHRP Site Classification. *4 Vs30: Average shear wave velocity down to 30m depth (m/s). | |||||
References
- Zahrah, T.; Hall, J. Earthquake energy absorption in SDOF structures. J. Struct. Eng. 1984, 110, 1757–1772. [Google Scholar] [CrossRef]
- Akiyama, H. Earthquake-Resistant Limit-State Design for Buildings; The University of Tokyo Press: Tokyo, Japan, 1985. [Google Scholar]
- Park, Y.J.; Ang, A.H.S. Mechanistic Seismic Damage Model for Reinforced Concrete. J. Struct. Eng. 1985, 111, 722–739. [Google Scholar] [CrossRef]
- Cosenza, E.; Manfredi, G.; Ramasco, R. The use of damage functionals in earthquake engineering: A comparison between different methods. Earthq. Eng. Struc. Dyn. 1993, 22, 868–885. [Google Scholar] [CrossRef]
- Fajfar, P.; Vidic, T. Consistent inelastic design spectra: Hysteretic and input energy. Earthq. Eng. Struct. Dyn. 1994, 23, 523–532. [Google Scholar] [CrossRef]
- Chai, Y.H.; Fajfar, P.; Romstad, K.M. Formulation of duration-dependent inelastic seismic design spectrum. J. Struct. Eng. 1998, 124, 913–921. [Google Scholar] [CrossRef]
- Manfredi, G. Evaluation of Seismic Energy Demand. Earthq. Eng. Struct. Dyn. 2001, 30, 485–499. [Google Scholar] [CrossRef]
- Riddell, R.; Garcia, J.E. Hysteretic energy spectrum and damage control. Earthq. Eng. Struct. Dyn. 2001, 30, 1791–1816. [Google Scholar] [CrossRef]
- Kunnath, S.K.; Chai, Y.H. Cumulative damage-based inelastic cyclic demand spectrum. Earthq. Eng. Struct. Dyn. 2004, 33, 499–520. [Google Scholar] [CrossRef]
- Arroyo, D.; Ordaz, M. On the estimation of hysteretic energy demands for SDOF systems. Earthq. Eng. Struct. Dyn. 2007, 36, 2365–2382. [Google Scholar] [CrossRef]
- Kazantzi, A.; Vavatsikos, D. The Hysteretic Energy as a Performance Measure in Analytical Studies. Earthq. Spect. 2018, 34, 719–739. [Google Scholar] [CrossRef]
- Housner, G.W. Limit design of structures to resist earthquakes. In Proceedings of the 1st World Conference on Earthquake Engineering, Berkeley, CA, USA, 1956. [Google Scholar]
- Mezgebo, M.G.; Lui, E.M. Hysteresis and Soil Site Dependent Input and Hysteretic Energy Spectra for Far-Source Ground Motions. Adv. Civ. Eng. 2016, 1548319, 1–29. [Google Scholar] [CrossRef]
- Mezgebo, M.G.; Lui, E.M. A new methodology for energy-based seismic design of steel moment frames. Earthq. Eng. Eng. Vib. 2017, 16, 131–152. [Google Scholar] [CrossRef]
- Homaei, F. Estimation of the ductility and hysteretic energy demands for soil–structure systems. Bull. Earthq. Eng. 2021, 19, 1365–1413. [Google Scholar] [CrossRef]
- Hasanoğlu, S.; Güllü, E.; Güllü, A. Empirical correlations of constant ductility seismic input and hysteretic energies with conventional intensity measures. Bull. Earthq. Eng. 2023, 21, 4905–4922. [Google Scholar] [CrossRef]
- Dindar, A.A.; Yalçin, C.; Yüksel, E.; Özkaynak, H.; Büyüköztürk, O. Development of Earthquake Energy Spectra. Earthq. Spect. 2015, 31, 1667–1689. [Google Scholar] [CrossRef]
- Uang, C.M.; Bertero, V.V. Evaluation of seismic energy in structures. Earthq. Eng. Struct. Dyn. 1990, 19, 77–90. [Google Scholar] [CrossRef]
- Nakashima, M.; Saburi, K.; Tsuji, B. Energy Input and Dissipation Behavior of Structures with Hysteretic Dampers. Earthq. Eng. Struct. Dyn. 1996, 19, 77–90. [Google Scholar]
- Kuwamura, H.; Galambos, T.V. Earthquake Load for Structural Reliability. J. Struct. Eng. 1989, 115, 1446–1462. [Google Scholar] [CrossRef]
- Güllü, A.; Yüksel, E.; Yalçin, C.; Dindar, A.A.; Özkaynak, H.; Büyüköztürk, O. An improved input energy spectrum verified by the shake table tests. Wiley 2019, 31, 1667–1689. [Google Scholar] [CrossRef]
- Rahnama, M.; Krawinkler, H. Effects of Soft Soil and Hysteretic Model on Seismic Demands; Report No 108; John A. Blume Earthquake Engineering Center, Stanford University: Stanford, CA, USA, 1993. [Google Scholar]
- Foutch, D.A.; Shi, S. Effects of hysteresis type on the seismic response of buildings. In Proceedings of the 6th U.S. National Conference on Earthquake Engineering, EERI, Seattle, WA, USA, 31 May–4 June 1998. [Google Scholar]
- Huang, Z.; Foutch, D.A. Effect of hysteresis type on drift limit for global collapse of moment frame structures under seismic loads. J. Earthq. Eng. 2009, 13, 1363–2469. [Google Scholar] [CrossRef]
- Ibarra, L.F.; Medina, R.A.; Krawinkler, H. Hysteretic models that incorporate strength and stiffness deterioration. Earthq. Eng. Struct. Dyn. 2005, 34, 1489–1511. [Google Scholar] [CrossRef]
- Narges Gholami, N.; Garivani, S.; Askariani, S.S. State-of-the-Art Review of Energy-Based Seismic Design Methods. Arch. Comp. Methods Eng. 2021, 29, 1965–1996. [Google Scholar] [CrossRef]
- Zhou, Y.; Song, G.; Huang, S.; Wu, H. Input energy spectra for self-centering SDOF systems. Soil Dyn. Earthq. Eng. 2019, 121, 293–305. [Google Scholar] [CrossRef]
- Deniz, D.; Song, J.; Hajjar, J.F. Energy-based sidesway collapse fragilities for ductile structural frames under earthquake loadings. Eng. Struct. 2018, 174, 282–294. [Google Scholar] [CrossRef]
- Bertero, V.V.; Mahin, S.A.; Herrera, R.A. Aseismic design implications of San Fernando earthquake records. Earthq. Eng. Struct. Dyn. 1978, 6, 31–42. [Google Scholar] [CrossRef]
- Ambraseys, N.; Douglas, J. ESEE Report No. 00-4-Reapprasial of the Effect of Vertical Ground Motions on Response; Imperial College Civil and Environmental Department: London, UK, 2000. [Google Scholar]
- FEMA 450 NEHRP Recommended Provisions for Seismic Regulations for New Buildings and Other Structures; Federal Emergency Management Agency: Washington, DC, USA, 2003.
- Kuwamura, H.; Kirino, Y.; Akiyama, W. Prediction of earthquake energy input from smoothed Fourier amplitude spectrum. Earthq. Eng. Struct. Dyn. 1994, 23, 1125–1137. [Google Scholar] [CrossRef]
- Ordaz, M.; Huerta, B.; Reinoso, E. Exact computation of input-energy spectra from Fourier amplitude spectra. Earthq. Eng. Struct. Dyn. 2003, 32, 597–605. [Google Scholar] [CrossRef]
- Fajfar, P.; Vidic, T.; Fischinger, M. Seismic Design in Medium- and Long- Period Structures. Earthq. Eng. Struct. Dyn. 1989, 18, 1133–1144. [Google Scholar] [CrossRef]
- Vidic, T.; Fajfar, P.; Fischinger, M. Consistent inelastic design spectra: Strength and displacement. Earthq. Eng. Struct. Dyn. 1994, 23, 507–521. [Google Scholar] [CrossRef]
- Miranda, E.; Ruiz-Garcia, J. Influence of stiffness degradation on strength demands of structures built on soft soil sites. Eng. Struct. 2002, 24, 1271–1281. [Google Scholar] [CrossRef]
- Ruiz-Garcia, J.; Miranda, E. Inelastic displacement ratios for design of structures on soft soil sites. ASCE J. Struct. Eng. 2004, 130, 2051–2061. [Google Scholar] [CrossRef]
- Ruiz-Garcia, J.; Miranda, E. Inelastic displacement ratios for evaluation of existing structures. Earthq. Eng. Struct. Dyn. 2003, 32, 1237–1258. [Google Scholar] [CrossRef]
- Miranda, E. Evaluation of site-dependent inelastic seismic design spectra. ASCE J. Struct. Eng. 1993, 119, 1319–1338. [Google Scholar] [CrossRef]
- Hancıoğlu, B.; Polat, Z.; Kırçıl, M.S. Estimation of characteristic period for energy based seismic design. In Proceedings of the 2008 Seismic Engineering Conference Commemorating the 1908 Messina and Reggio Calabria Earthquake Parts 1–2, AIP Conference Proceedings, Reggio Calabria, Italy, 8–11 July 2008; Volume 1020, pp. 937–946. [Google Scholar]
- Cosenza, E.; Manfredi, G. The improvement of the seismic-resistant design for existing and new structures using damage criteria. In Proceedings of the International Workshop on Seismic Design Methodologies for the Next Generation of Codes, Balkema, Bled, Slovenia, 24–27 June 1997; pp. 1–31. [Google Scholar]
- Somerville, P.G.; Smith, N.F.; Graves, R.W.; Abrahamson, N.A. Modification of empirical strong ground motion attenuation relations to include the amplitude and duration effects of rupture directivity. Seismol. Res. Lett. 1997, 68, 199–222. [Google Scholar] [CrossRef]
- Trifunac, M.D.; Brady, A.G. A Study on the Duration of Strong Earthquake Ground Motion. Bull. Seismol. Soc. Am. 1975, 65, 581–626. [Google Scholar]
- Bolt, B.A. Duration of strong ground motions. In Proceedings of the Fifth World Conference on Earthquake Engineering, Rome, Italy, 25–29 June 1973; Volume 1, pp. 1304–1313. [Google Scholar]
- Ang, A.H.S.; Tang, W.H. Probability Concepts in Engineering Planning and Design, Basic Principles-Vol. 1; Wiley: Toronto, ON, Canada, 1975. [Google Scholar]
- Sucuoğlu, H.; Yücemen, S.; Gezer, A.; Erberik, A. Statistical evaluation of the damage potential of earthquake ground motions. Struct. Saf. 1998, 20, 357–378. [Google Scholar] [CrossRef]
- StatSoft Inc. Electronic Statistics Textbook. Tulsa OK. Available online: http://www.statsoft.com/-textbook/stathome.html (accessed on 1 April 2008).










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ry Group | Ry |
|---|---|
| 1 | 1.5 |
| 2 | 2 |
| 3 | 3 |
| 4 | 4 |
| 5 | 5 |
| 6 | 6 |
| td Group | td (s) | Number of Records | Mean td (s) |
|---|---|---|---|
| 1 | td ≤ 12 | 70 | 9.3 |
| 2 | 12 < td ≤ 20 | 84 | 15.5 |
| 3 | 20 < td ≤ 28 | 57 | 23.6 |
| 4 | td > 28 | 57 | 34.0 |
| Ry | T | T/Te | Te | IE | ID | SI | td75 | td | tuni | PGA | PGV | PSV | PSVTe | |||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Ve | 1.00 | |||||||||||||||||
| Ve/PSV | −0.07 | 1.00 | ||||||||||||||||
| Ve,max | 0.80 | 0.01 | 1.00 | |||||||||||||||
| Ve,max/PSVTe | −0.10 | 0.19 | −0.07 | 1.00 | ||||||||||||||
| Ry | −0.04 | 0.03 | −0.17 | −0.41 | 1.00 | |||||||||||||
| T | 0.13 | −0.34 | 0.23 | −0.22 | 0.00 | 1.00 | ||||||||||||
| T/Te | −0.24 | −0.33 | −0.10 | 0.10 | 0.00 | 0.56 | 1.00 | |||||||||||
| Te | 0.39 | −0.07 | 0.37 | −0.35 | 0.00 | 0.50 | −0.30 | 1.00 | ||||||||||
| IE | 0.72 | 0.02 | 0.86 | −0.06 | 0.00 | 0.11 | −0.05 | 0.18 | 1.00 | |||||||||
| ID | −0.16 | 0.22 | −0.19 | 0.70 | 0.00 | −0.17 | 0.06 | −0.23 | −0.10 | 1.00 | ||||||||
| SI | 0.80 | −0.05 | 0.85 | −0.28 | 0.00 | 0.32 | −0.14 | 0.53 | 0.76 | −0.34 | 1.00 | |||||||
| td75 | 0.26 | 0.20 | 0.20 | 0.42 | 0.00 | 0.16 | −0.11 | 0.35 | 0.11 | 0.45 | 0.12 | 1.00 | ||||||
| td | 0.33 | 0.19 | 0.28 | 0.35 | 0.00 | 0.19 | −0.09 | 0.33 | 0.18 | 0.34 | 0.19 | 0.90 | 1.00 | |||||
| tuni | 0.34 | 0.20 | 0.29 | 0.38 | 0.00 | 0.21 | −0.12 | 0.41 | 0.16 | 0.46 | 0.21 | 0.93 | 0.90 | 1.00 | ||||
| PGA | 0.53 | −0.08 | 0.66 | −0.23 | 0.00 | 0.01 | 0.01 | −0.03 | 0.80 | −0.37 | 0.63 | −0.30 | −0.19 | −0.30 | 1.00 | |||
| PGV | 0.76 | −0.06 | 0.85 | −0.28 | 0.00 | 0.27 | −0.12 | 0.43 | 0.79 | −0.41 | 0.95 | 0.03 | 0.13 | 0.12 | 0.72 | 1.00 | ||
| PSV | 0.90 | −0.31 | 0.70 | −0.22 | 0.00 | 0.27 | −0.09 | 0.39 | 0.63 | −0.27 | 0.79 | 0.09 | 0.14 | 0.15 | 0.54 | 0.75 | 1.00 | |
| PSVTe | 0.76 | −0.04 | 0.92 | −0.34 | 0.00 | 0.27 | −0.12 | 0.44 | 0.82 | −0.33 | 0.92 | 0.02 | 0.10 | 0.11 | 0.71 | 0.91 | 0.74 | 1.00 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hancıoğlu, B.; Kirçil, M.S.; Polat, Z. Equivalent Input Energy Velocity of Elastoplastic SDOF Systems with Specific Strength. Buildings 2025, 15, 2288. https://doi.org/10.3390/buildings15132288
Hancıoğlu B, Kirçil MS, Polat Z. Equivalent Input Energy Velocity of Elastoplastic SDOF Systems with Specific Strength. Buildings. 2025; 15(13):2288. https://doi.org/10.3390/buildings15132288
Chicago/Turabian StyleHancıoğlu, Baykal, Murat Serdar Kirçil, and Zekeriya Polat. 2025. "Equivalent Input Energy Velocity of Elastoplastic SDOF Systems with Specific Strength" Buildings 15, no. 13: 2288. https://doi.org/10.3390/buildings15132288
APA StyleHancıoğlu, B., Kirçil, M. S., & Polat, Z. (2025). Equivalent Input Energy Velocity of Elastoplastic SDOF Systems with Specific Strength. Buildings, 15(13), 2288. https://doi.org/10.3390/buildings15132288