
Finite Element Analysis of Curved Beam Elements Employing Trigonometric Displacement Distribution Patterns


Abstract
:1. Introduction
2. Displacement Distribution Pattern of Triangular Function for Curved Beam Element
2.1. Basic Assumptions
2.2. Displacement Shape Functions of a Curved Beam Element
3. Curved Beam Element Stiffness Matrix
4. Curved Beam Element Consistent Mass Matrix
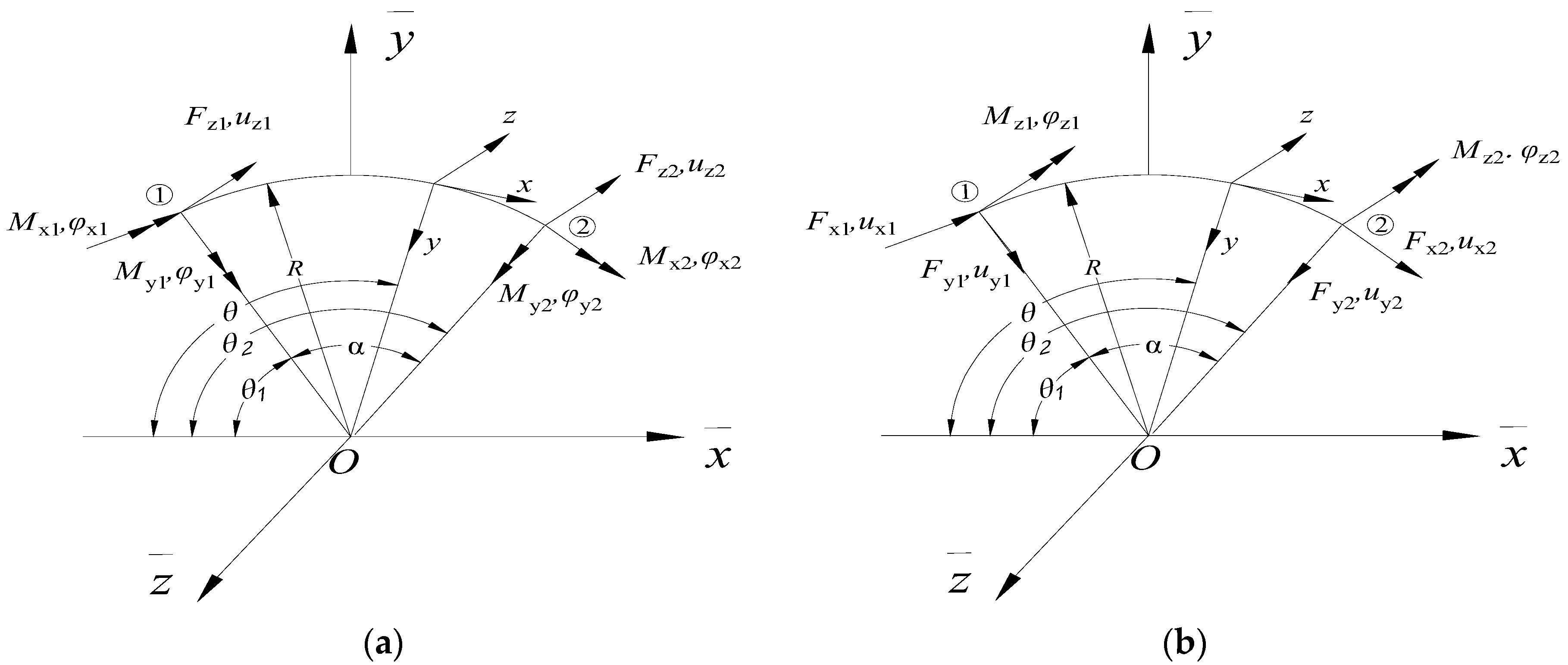
5. A Coordinate Transformation Matrix for Quadrilateral Beam Elements
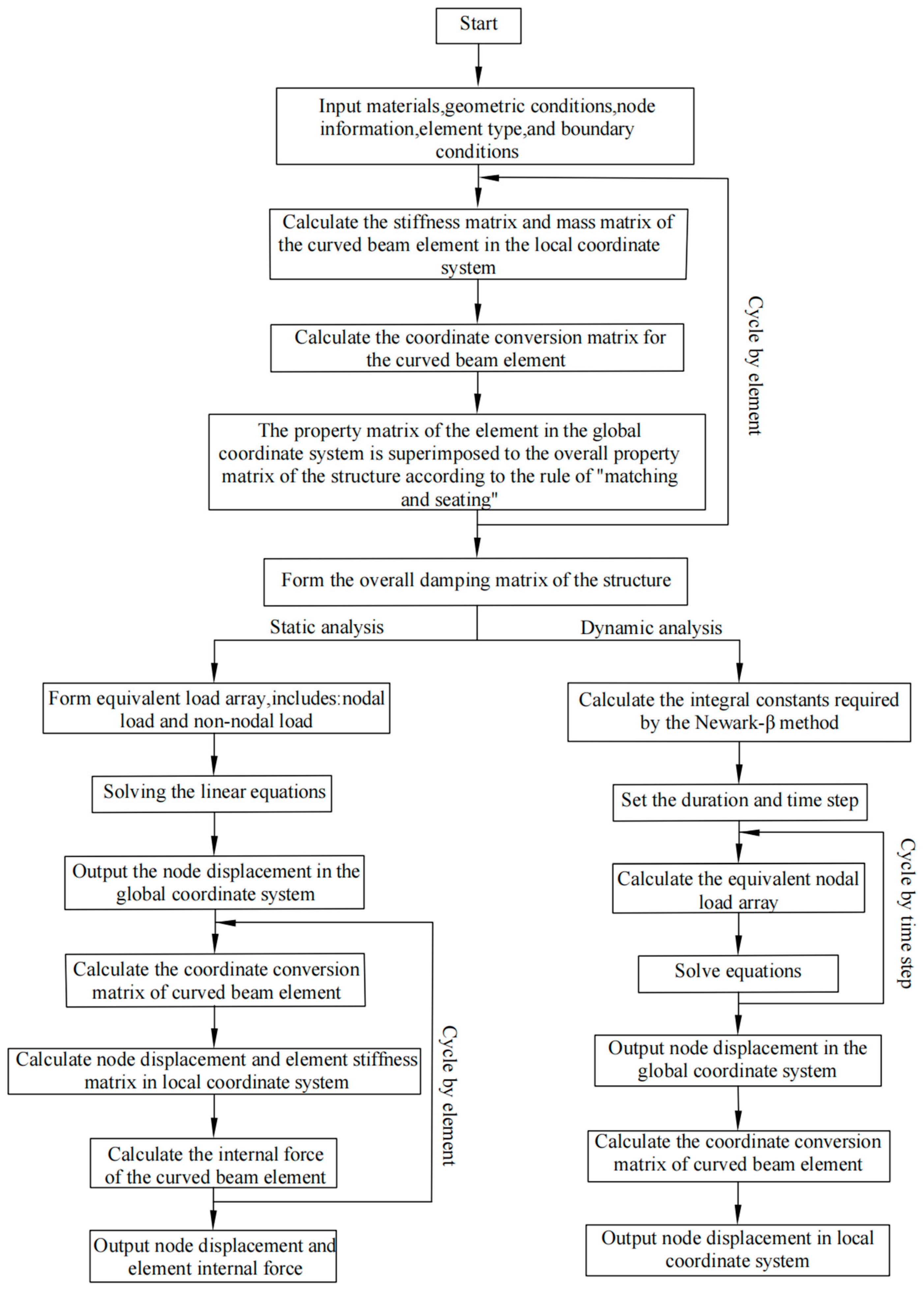
6. Development of a Finite Element Analysis Program for Quadrilateral Beam Elements in Curved Beams
7. Validation of the Quadrilateral Beam Element Characteristic Matrix for Curved Beams: Numerical Examples
7.1. Model Development and Validation for Civil Engineering Applications
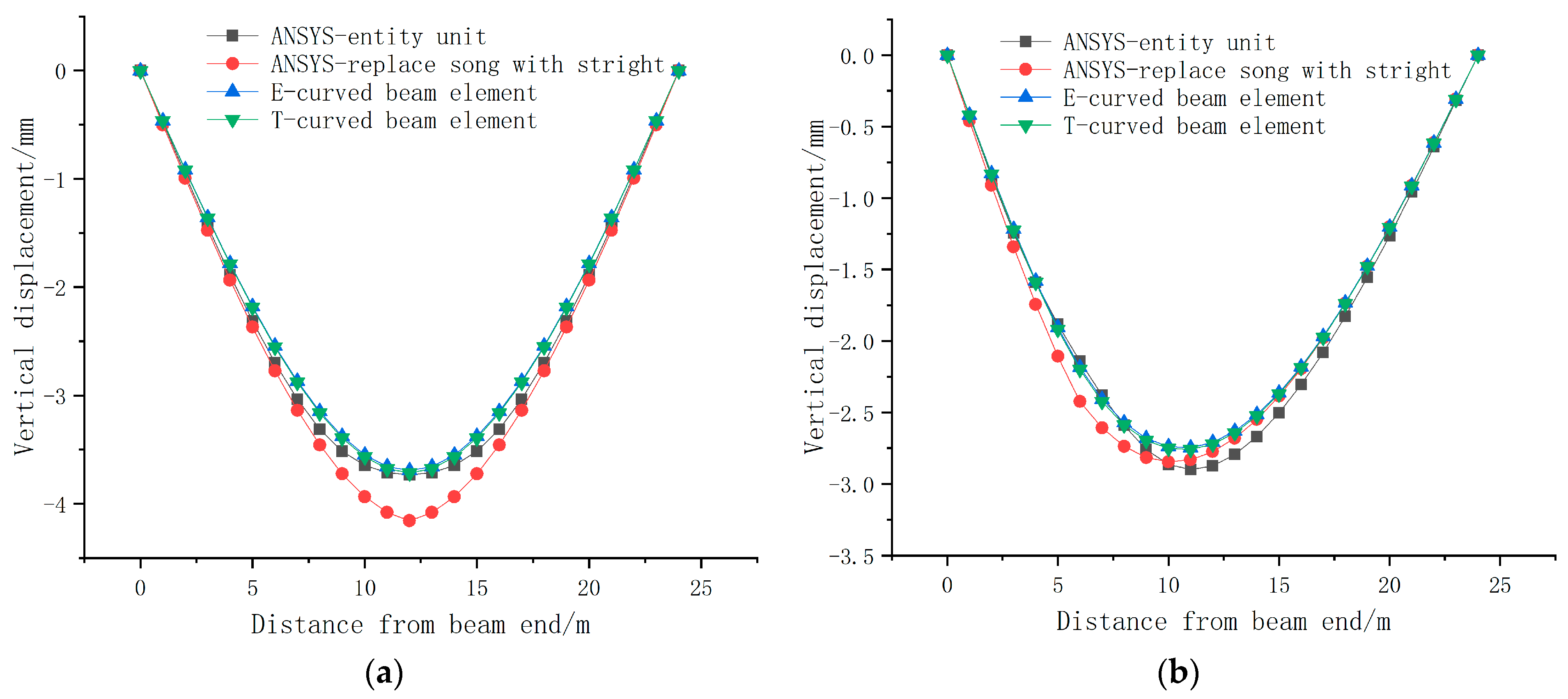
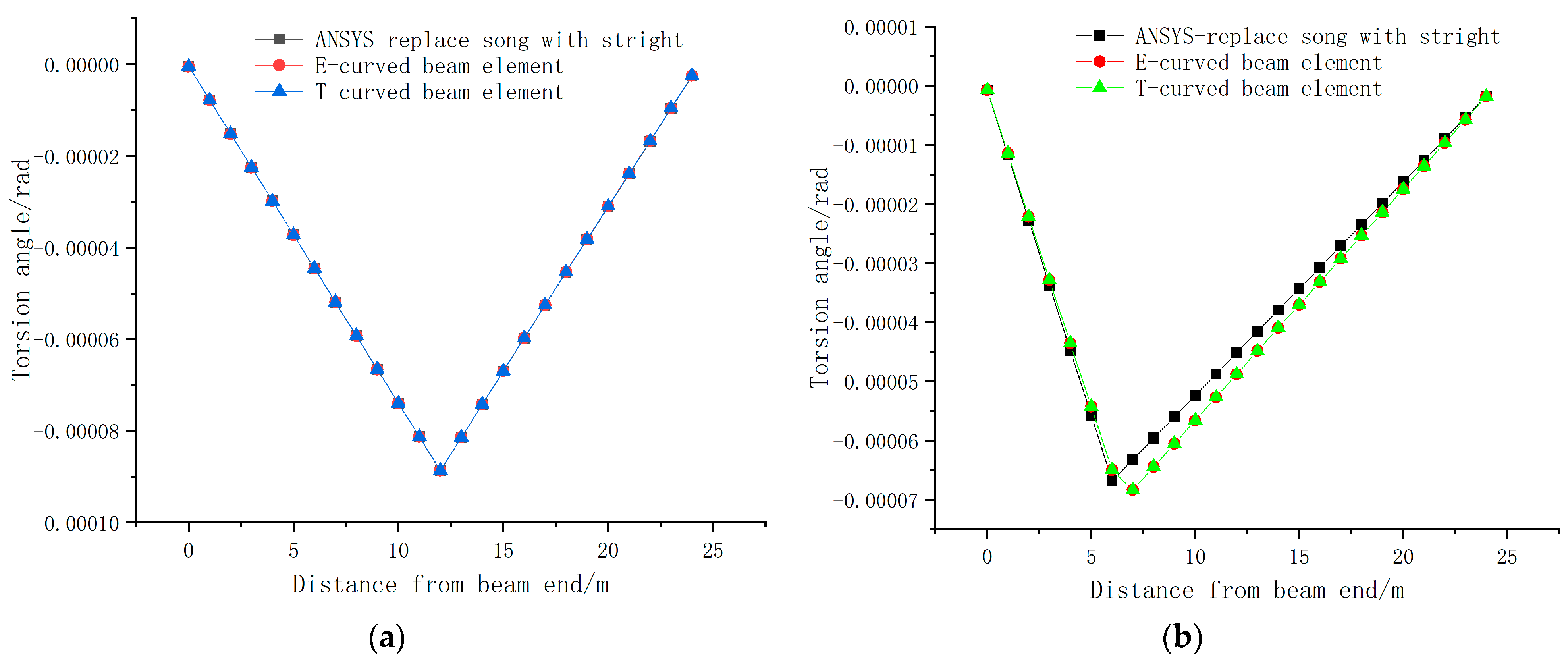
7.2. Analysis of Results for Civil Engineering Applications: Static Analysis
Analysis of Natural Frequencies and Modes for Civil Engineering Applications
7.3. Analysis of Results for Civil Engineering Applications: Dynamic Analysis
8. Conclusions
- The computed results from both the Euler and Timoshenko curved beam element models exhibited an excellent correlation with the solid model in ANSYS software, thus confirming the accuracy of the characteristic matrix derived for the curved beam element in this study;
- The vertical displacement of the “straight-substituted-curved” beam element model was consistently higher, implying that the “straight-substituted-curved” approach resulted in a decrease in the vertical stiffness of the curved beam. This reduction can be attributed to the neglect of the bending–torsion coupling effect in the simulation of the curved beam bridge using this approach;
- The utilization of curved beam elements for numerical analysis of curved beam bridges can noticeably diminish the total degree of freedom, enhancing the computational speed and convenience, while facilitating the advancement of computational programs, thus rendering this an exceptionally beneficial approach for modeling curved beam bridges and extending research on topics such as vehicle–bridge coupling vibration for curved beam bridges, which require a high degree of accuracy and computational efficiency to achieve optimal results;
- This study demonstrates that the displacement distribution model based on trigonometric functions employed in the finite element analysis of curved beam elements exhibited a relatively limited scope. Subsequent investigations should encompass the utilization of diverse models for the purpose of validation and analysis.
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhou, L.; Liu, Z.; Yan, X.; Li, Q. Design Theory and Analytical Methods for Curved Beam Bridge Structures; People’s Communications Press: Beijing, China, 2018. [Google Scholar]
- Edita, D.; Bořek, P. An isogeometric Timoshenko curved beam element with an enhanced representation of concentrated loads. Comput. Struct. 2022, 270, 106815. [Google Scholar]
- Rezaiee-Pajand, M.; Rajabzadeh-Safaei, N.; Masoodi, R.A. An efficient mixed interpolated curved beam element for geometrically nonlinear analysis. Appl. Math. Model. 2019, 76, 252–273. [Google Scholar] [CrossRef]
- Dragan, R. A Simple and Efficient Three-Node Curved Beam Element for the Out-of-Plane Shear, Bending and Torsion, Based on the Linked Interpolation Concept. Trans. Famena 2021, 45, 13–29. [Google Scholar]
- Zhang, Z. Theoretical Research and Application of Qu-Liang Element in Bridges. Master’s Thesis, Changsha University of Science and Technology, Changsha, China, 2014. [Google Scholar]
- Luo, H. Analysis and Research on the Mechanical Properties of Curved Beam Bridges. Master’s Thesis, Chang’an University, Xi’an, China, 2014. [Google Scholar]
- Macedo, R.C.; Marcos, A.; Dalledone, R.M. Free in-plane vibration analysis of curved beams by the generalized/extended finite element method. Eur. J. Mech. A Solids 2021, 88, 104244. [Google Scholar]
- Jočković, M.; Radenković, G.; Nefovska-Danilović, M.; Baitsch, M. Free vibration analysis of spatial Bernoulli–Euler and Rayleigh curved beams using isogeometric approach. Appl. Math. Model. 2019, 71, 152–172. [Google Scholar] [CrossRef]
- Gao, Y.; He, G.; Zhou, W. Finite element analysis of plane curved beam. West China Explor. Eng. 2005, 6, 188–190. [Google Scholar]
- Zhou, W.; Zeng, Q. Geometric nonlinear finite element analysis of spatial curved beams. J. Chang. Railw. Univ. 1998, 3, 1–5. [Google Scholar] [CrossRef]
- Wu, Y.; Lai, Y.; Zhang, X.; Zhu, Y. Analysis of static and dynamic characteristics of curved box girder by finite segment element. J. China Railw. Soc. 2001, 5, 81–84. [Google Scholar]
- Guo, W.; Ding, M.; Deng, T.; Jiang, X.; Wang, B.; Huang, Z. Direct Stiffness Method for Static Analysis of Circular Arch Structures. J. Guangxi Univ. 2017, 42, 1351–1360. [Google Scholar]
- Nadi, A.; Raghebi, M. Finite Element Model of Circularly Curved Timoshenko Beam for In-plane Vibration Analysis. FME Trans. 2021, 49, 615–626. [Google Scholar] [CrossRef]
- Chen, J. Stiffness Matrix and Consistent Mass Matrix of Element for Curved Beam Displacement Field Function. Transp. Stand. 2008, 2008, 51–54. [Google Scholar]
- Li, X.; Li, P.; Sun, L. Decoupling Solution Method and Verification of Free Vibration Differential Equations for Curved Beams. Nucl. Power Eng. 2016, 37, 7–10. [Google Scholar]
- Rezaiee-Pajand, M.; Rajabzadeh-Safaei, N. An explicit stiffness matrix for parabolic beam element. Lat. Am. J. Solids Struct. 2016, 13, 1782–1801. [Google Scholar] [CrossRef]
- Lebeck, A.O.; Knowlton, J.S. A finite element for the three-dimensional deformation of a circular ring. Int. J. Numer. Methods Eng. 1985, 21, 421–435. [Google Scholar] [CrossRef]
- Wu, J.S.; Chiang, L.K. A new approach for free vibration analysis of arches with effects of shear deformation and rotary inertia considered. J. Sound Vib. 2004, 277, 49–71. [Google Scholar] [CrossRef]
- Wu, J.S.; Chiang, L.K. A new approach for displacement functions of a curved Timoshenko beam element in motions normal to its initial plane. Int. J. Numer. Methods Eng. 2005, 64, 1375–1399. [Google Scholar] [CrossRef]
- Kim, J.G.; Lee, J.K. Free-vibration analysis of arches based on the hybrid-mixed formulation with consistent quadratic stress functions. Comput. Struct. 2007, 86, 1672–1681. [Google Scholar] [CrossRef]
- Desantiago, E.; Mohammadi, J.; Albaijat, H. Analysis of horizontally curved bridges using simple finite-element models. Pract. Period. Struct. Des. Constr. 2005, 10, 18–21. [Google Scholar] [CrossRef]
- Zhang, J.; Yin, H.; Li, J.; Chen, H. Derivation of Stiffness Matrix for Euler-Bernoulli Beam Element. J. Water Resour. Archit. Eng. 2019, 17, 89–93+131. [Google Scholar]
- Jiang, T. Key Technologies for Design of Curved Beam Bridges and Experimental Study of Model. Master’s Thesis, Dalian University of Technology, Dalian, China, 2021. [Google Scholar]
- Chen, P.; Du, H.; Sun, S.; Fu, X. Unified Formation Method of General Beam Element in Finite Element Software. Mech. Eng. Pract. 2021, 43, 446–452. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Element Type | 3D Solid Model in ANSYS | Beam Element Model in ANSYS | Euler–Bernoulli Beam Element Model | Timoshenko Beam Element Model | |
|---|---|---|---|---|---|
| Node Load | Lateral Displacement (unit in mm) | 0.168 | 0.296 | 0.128 | 0.189 |
| Vertical Displacement /mm | 3.734 | 4.160 | 3.695 | 3.717 | |
| Twist Angle/(×10−5 rad) | -- | 8.873 | 8.868 | 8.868 | |
| Non-Node Load | Transverse Displacement/mm | 0.110 | 0.187 | 0.079 | 0.121 |
| Vertical Displacement/mm | 2.900 | 2.850 | 2.750 | 2.759 | |
| Twist Angle/(×10−5 rad) | -- | 6.679 | 6.836 | 6.836 | |
| Element Type | Node Load (s) | Non-Node Load (s) |
|---|---|---|
| 3D solid model in ANSYS | 1 | 1 |
| Beam element model in ANSYS | 1 | 1 |
| Euler–Bernoulli beam element model | 0.9 | 0.9 |
| Timoshenko beam element model | 0.9 | 0.9 |
| Order | 3D Solid Model in ANSYS | Beam Element Model in ANSYS | Euler–Bernoulli Beam Element Model | Timoshenko Beam Element Model | Vibration Mode Characteristics |
|---|---|---|---|---|---|
| 1 | 6.88 | 6.86 | 7.21 | 7.19 | Symmetric vertical bending |
| 2 | 23.46 | 24.13 | 24.22 | 23.96 | Antisymmetric vertical bending |
| 3 | 29.95 | 29.57 | 31.64 | 30.16 | Lateral bending |
| 4 | 36.69 | 36.51 | 36.71 | 36.54 | Vertical displacement |
| 5 | 45.79 | 46.12 | 47.53 | 47.52 | Torsion |
| Element Type | Time (s) |
|---|---|
| 3D solid model in ANSYS | 1.2 |
| Beam element model in ANSYS | 1.2 |
| Euler–Bernoulli beam element model | 1.5 |
| Timoshenko beam element model | 1.5 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cao, H.; Chen, D.; Zhang, Y.; Wang, H.; Chen, H. Finite Element Analysis of Curved Beam Elements Employing Trigonometric Displacement Distribution Patterns. Buildings 2023, 13, 2239. https://doi.org/10.3390/buildings13092239
Cao H, Chen D, Zhang Y, Wang H, Chen H. Finite Element Analysis of Curved Beam Elements Employing Trigonometric Displacement Distribution Patterns. Buildings. 2023; 13(9):2239. https://doi.org/10.3390/buildings13092239
Chicago/Turabian StyleCao, Hengtao, Daihai Chen, Yunsen Zhang, Hexiang Wang, and Huai Chen. 2023. "Finite Element Analysis of Curved Beam Elements Employing Trigonometric Displacement Distribution Patterns" Buildings 13, no. 9: 2239. https://doi.org/10.3390/buildings13092239
APA StyleCao, H., Chen, D., Zhang, Y., Wang, H., & Chen, H. (2023). Finite Element Analysis of Curved Beam Elements Employing Trigonometric Displacement Distribution Patterns. Buildings, 13(9), 2239. https://doi.org/10.3390/buildings13092239