
Time Reversal Method for Lamb−Wave−Based Diagnostics of Multiple−Sleeve Grouting Connections


Abstract
:1. Introduction
2. Detection Principle of Lamb−Wave−Based Time Reversal Method
2.1. Basic Lamb Wave Theory
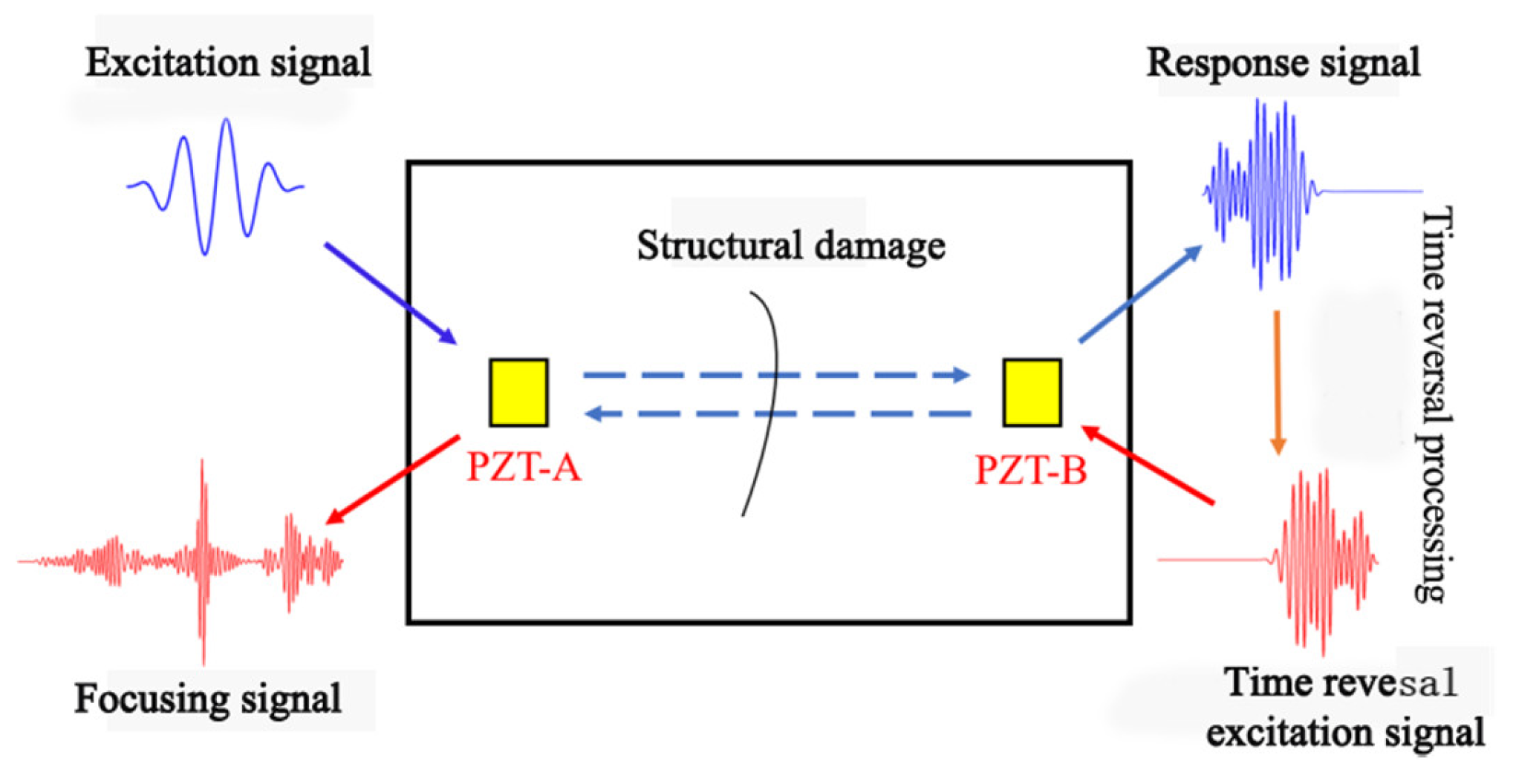
2.2. Application of the Lamb Wave Detection Principle
3. Establishment of Complex Layout Grouting Sleeve and Defect Model
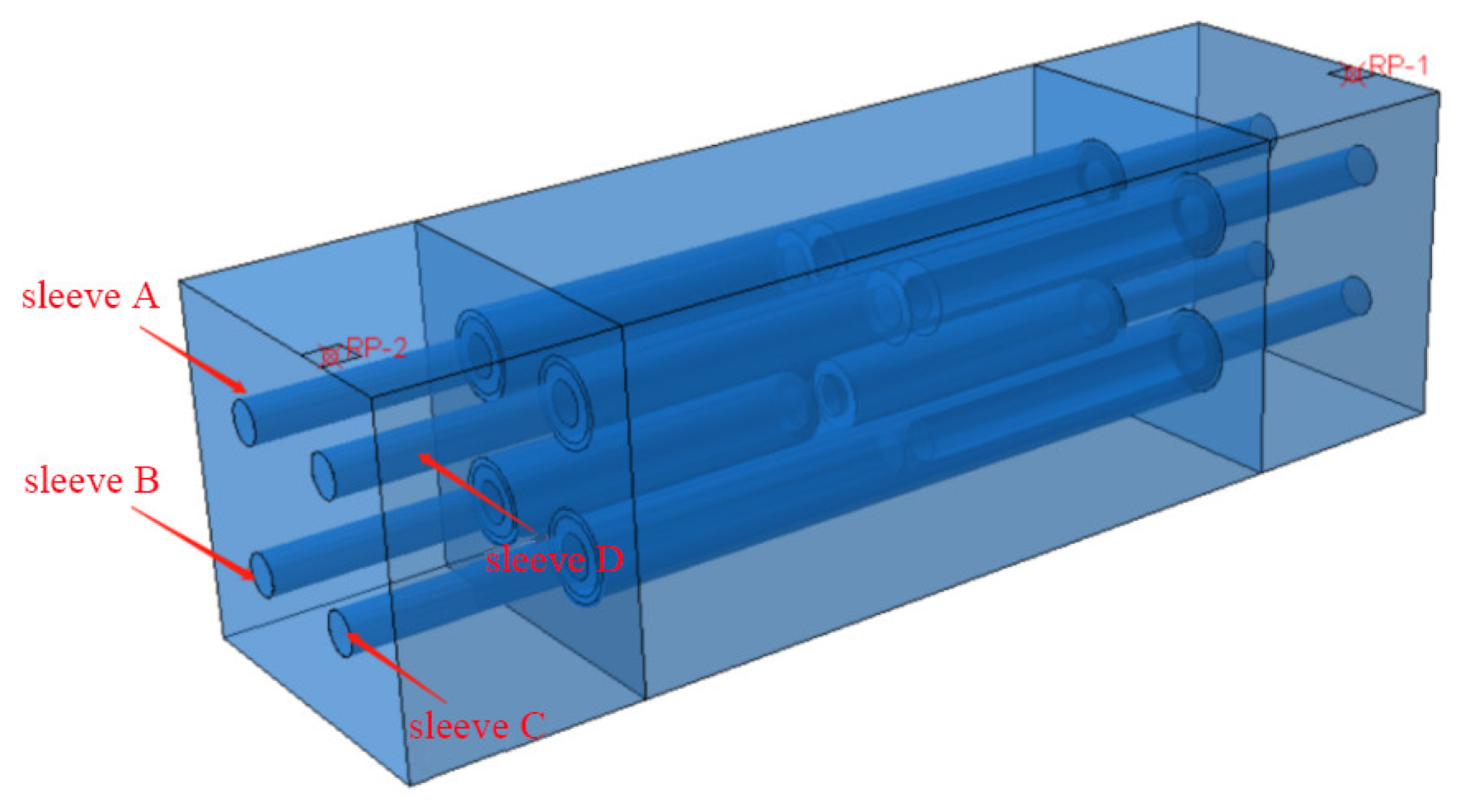
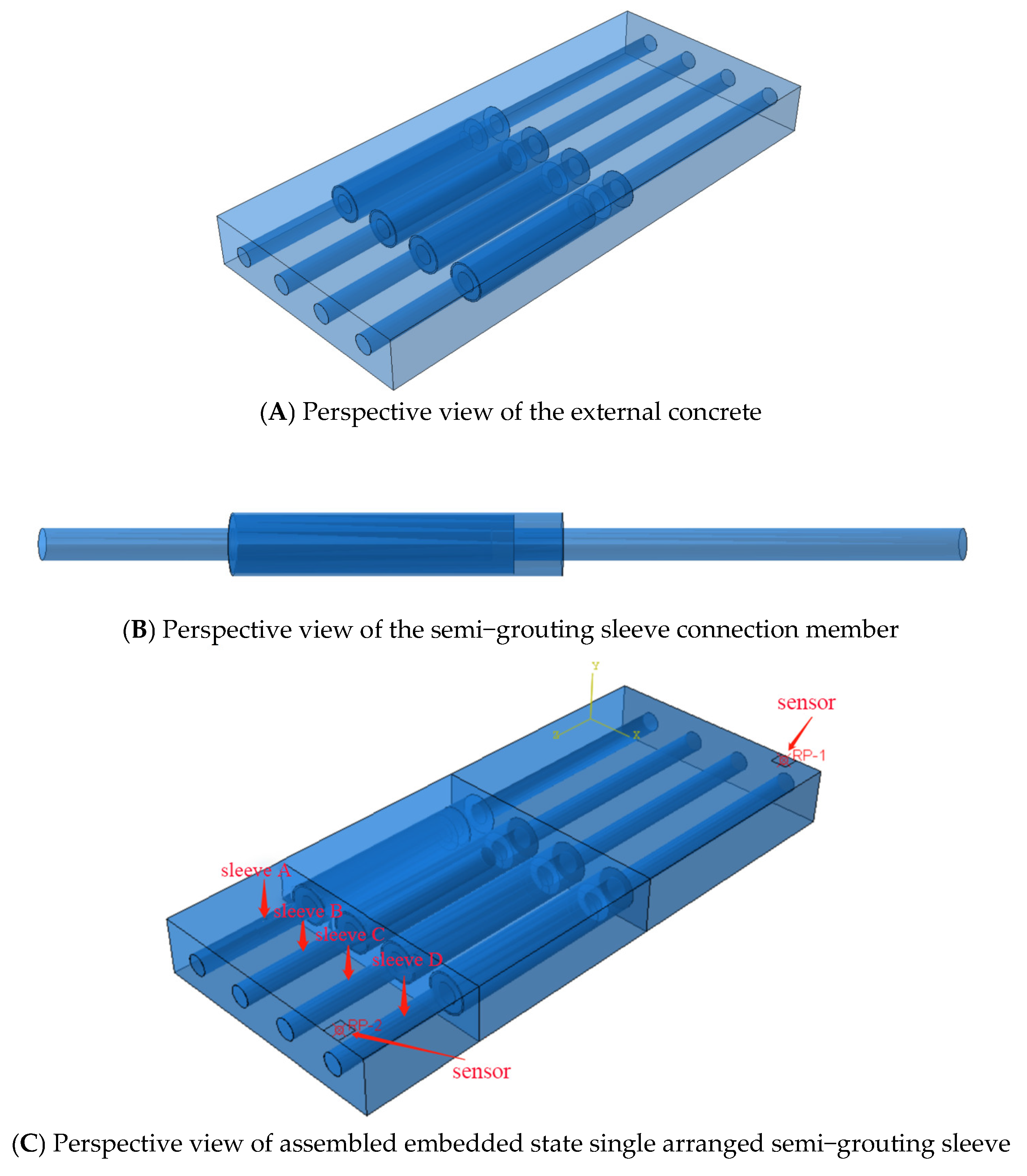
3.1. Complex Layout of the Grouting Sleeve Model
3.2. Establishment of the Defect Model
4. Verification of the Optimal Excitation Signal in the Injury State
4.1. Establishment of the Defect−State Model
4.2. Analysis of the Best Frequency Verification Results
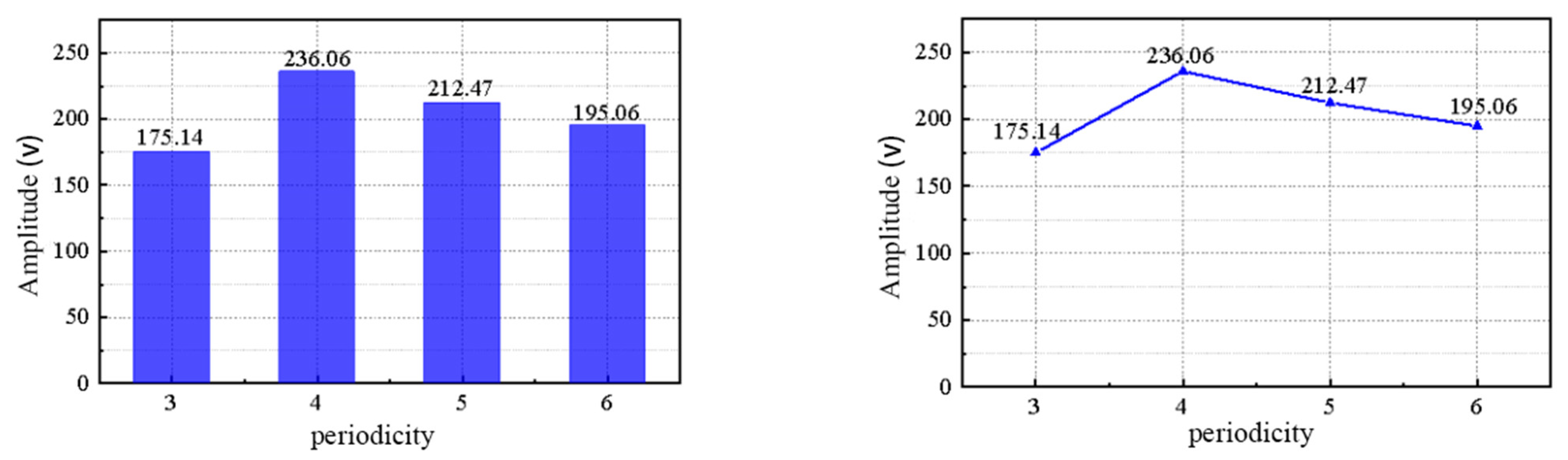
4.3. Analysis of the Optimal Cycle Validation Results
5. Defect Positioning of Complex Arranged Grouting Sleeve under Embedded State
5.1. Working Condition Setting and Model Establishment
5.2. Analysis and Discussion of the Results
6. Study on the Severity of Defects in the Embedded State of the Complex Layout Grouting Sleeve Connector
6.1. Conditions Setting and Model Establishment
6.1.1. Single−Row Arrangement of Grouting Sleeve Defects
6.1.2. Multiple−Defect Arrangement of Grouting Sleeves
6.1.3. Defect Arrangement of the Top of the Semi−Grouting Sleeve
6.2. Analysis and Discussion of the Results
6.2.1. Single−Row Arrangement
6.2.2. Multi−Row Arrangement Situation
- Structural height and width: The height and width of the structure have minimal impact on the peak period and occurrence time of the focused main lobe. However, as the structure size increases, the energy loss of Lamb waves propagating in the structure also increases. The energy loss caused by an increase in structure height is greater than that caused by an increase in structure width.
- Multi−row grouting sleeve: In the embedded state of multi−row grouting sleeves, Lamb waves are constantly reflected up and down between the left and right sleeves. Only the sleeves on the left and right sides consume energy, resulting in a minimum anti−focus peak in the state without damage.
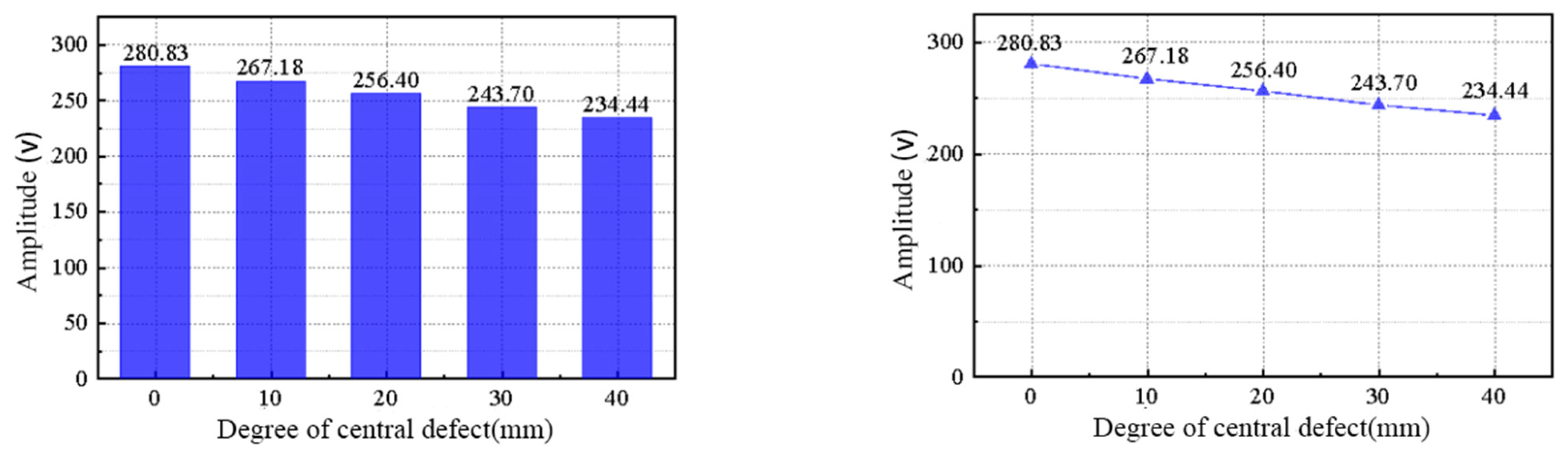
- Middle defect width: The width of the middle defect in the grouting sleeve directly affects the peak focus of the extracted and received signal. As the defect width increases, the peak focus decreases linearly. The Lamb−wave−based time reversal method can effectively detect defects and quantitatively judge their severity.
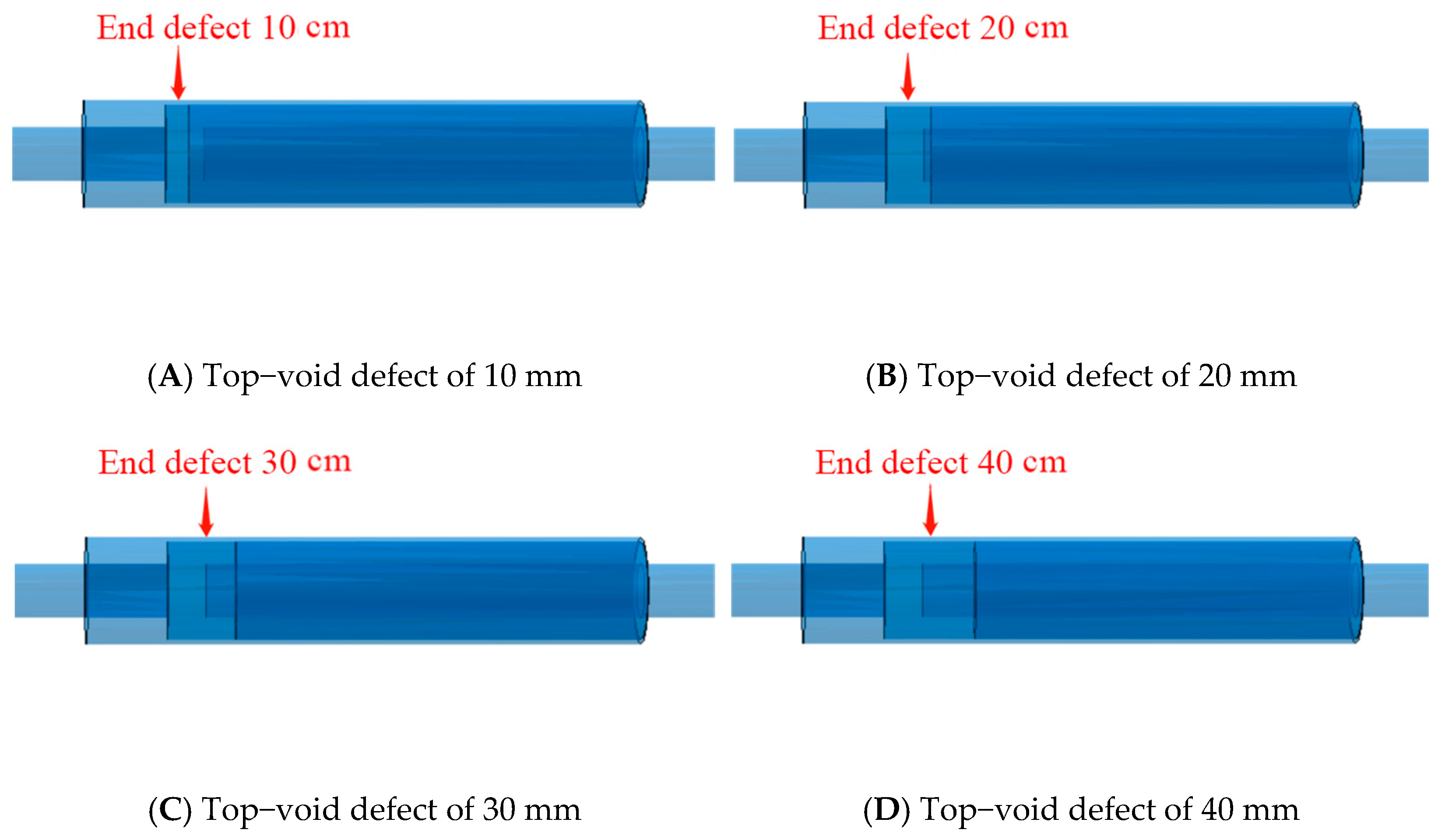
6.2.3. Arrangement of Half−Grouting
- Structural changes: Changes in the semi−grouting sleeve structure do not impact the peak period and appearance time of the focused main lobe. The Lamb−wave−based time reversal method remains consistent and reliable despite variations in the sleeve structure.
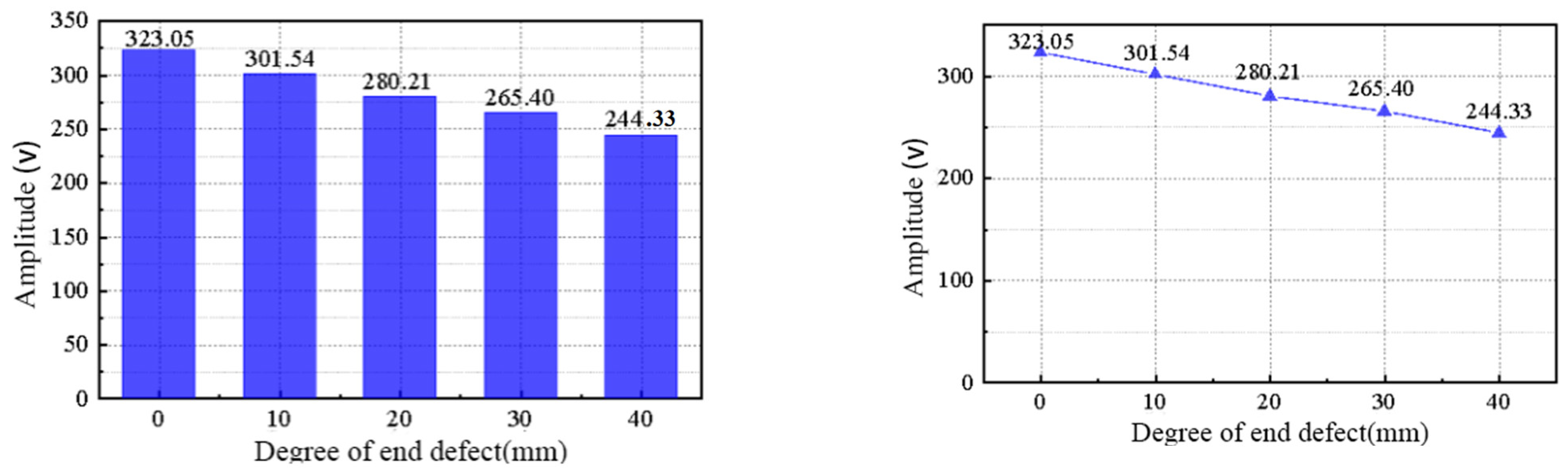
- Defect width: As the width of the top defects in the semi−grouting sleeve increases, the corresponding focus peak continuously decreases. The decrease in peak amplitude is roughly linear with the increase in defect width. This linear relationship allows for quantitative judgment of the severity of defects based on the time anti−focus peak.
- Detection effect: The Lamb−wave−based time reversal method shows a good detection effect on the top defects of the half−grouting sleeve. It can effectively detect vacancy defects at the top, steel offset, and horizontal grouting defects.
- Limitation: Due to the asymmetric structure of the half−grouting sleeve, defects cannot be accurately located using symmetric spot arrangements multiple times. This limitation should be considered when applying the method to half−grouting sleeve connections.
- However, in theory, there is a way to locate the semi−grouting sleeve. According to the conclusion of our paper, the full grouting sleeve can be divided into two identical structures, one half of which has no defects and the other half has defects. By arranging multiple measuring points to form several detection areas, the damage location is determined by comparing the peak difference between the two symmetrical structural areas. If it is a semi−grout sleeve, the damage location can be determined by comparing the two semi−grout sleeves. Specifically, two semi−grout sleeves are set up: one half−grout sleeve is set with defects inside, and the other half−grout sleeve has no damage inside. The two sleeves are arranged at the same size position and divided into the same detection areas. The damage location is determined by comparing the difference between the peaks of the two sleeves in the same area.
7. Conclusions
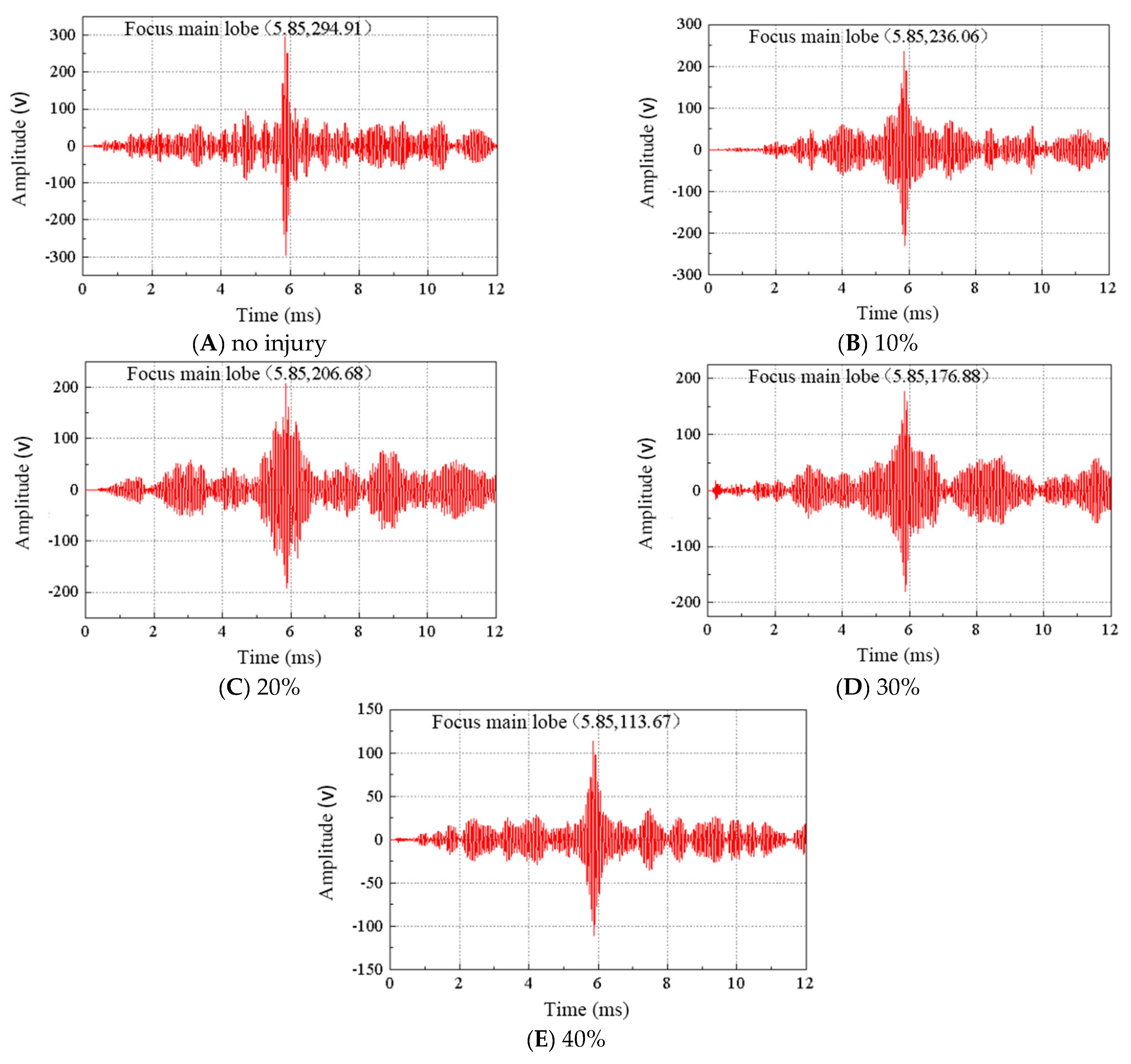
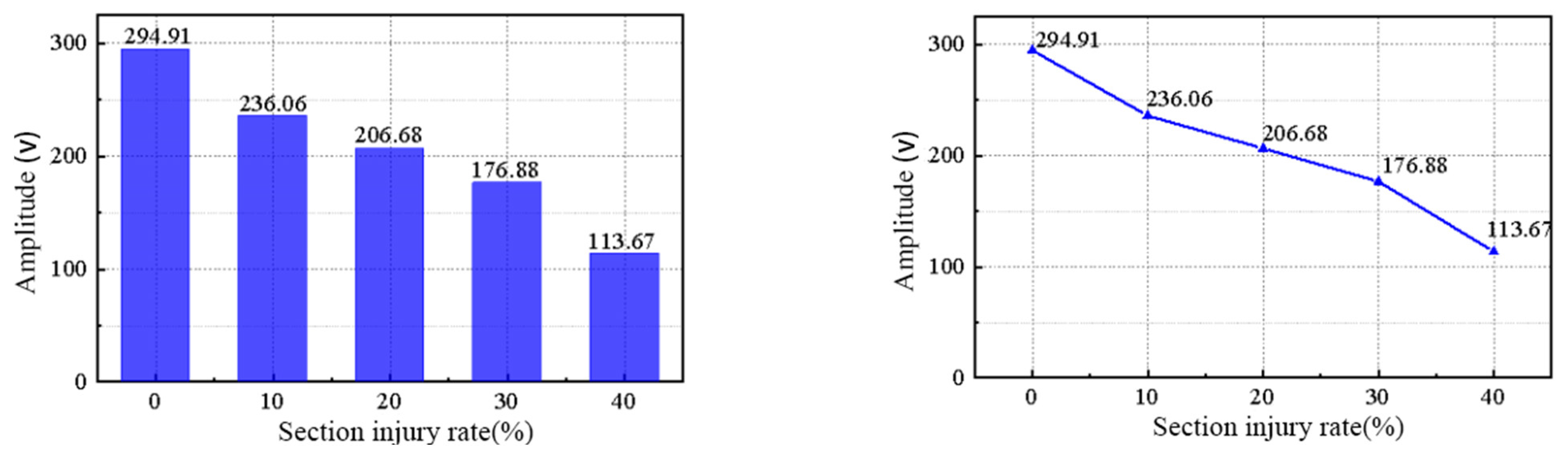
- Detection of single−row grouting sleeve: The Lamb−wave−based time reversal method is capable of effectively identifying the severity of damage in single−row grouting sleeves with different horizontal emptying defects. Larger defects result in smaller signal focus amplitudes extracted at the receiving end, providing a reliable means of detecting and evaluating the damage in embedded grouting sleeves.
- Detection of multi−row grouting sleeve: In the case of embedded multi−row cloth and multiple grouting sleeves, the Lamb−wave−based time reversal method can successfully detect and quantify the middle void defects of varying severity. The increase in structure height causes energy loss in Lamb wave transmission, but it does not significantly affect the overall detection results.
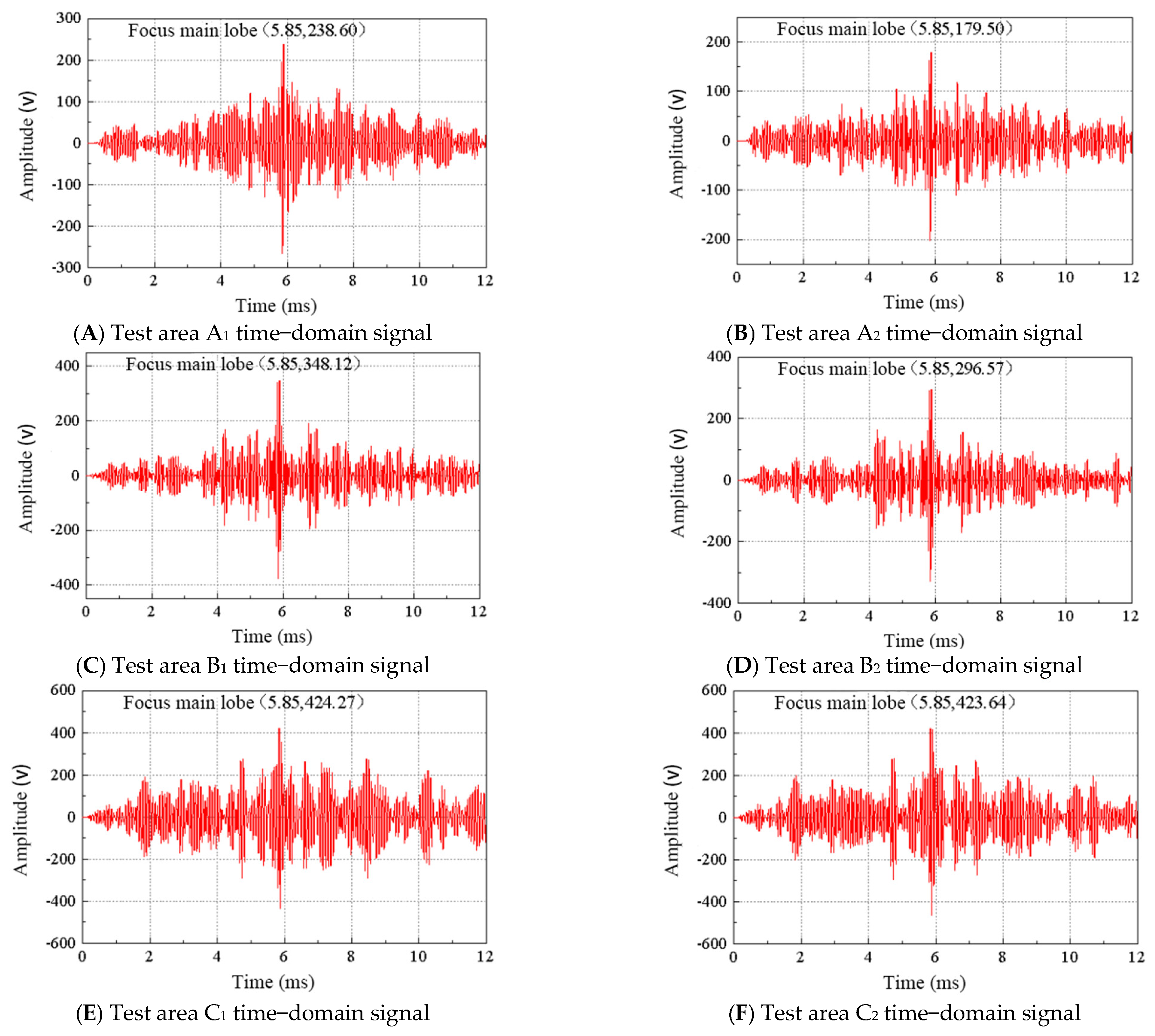
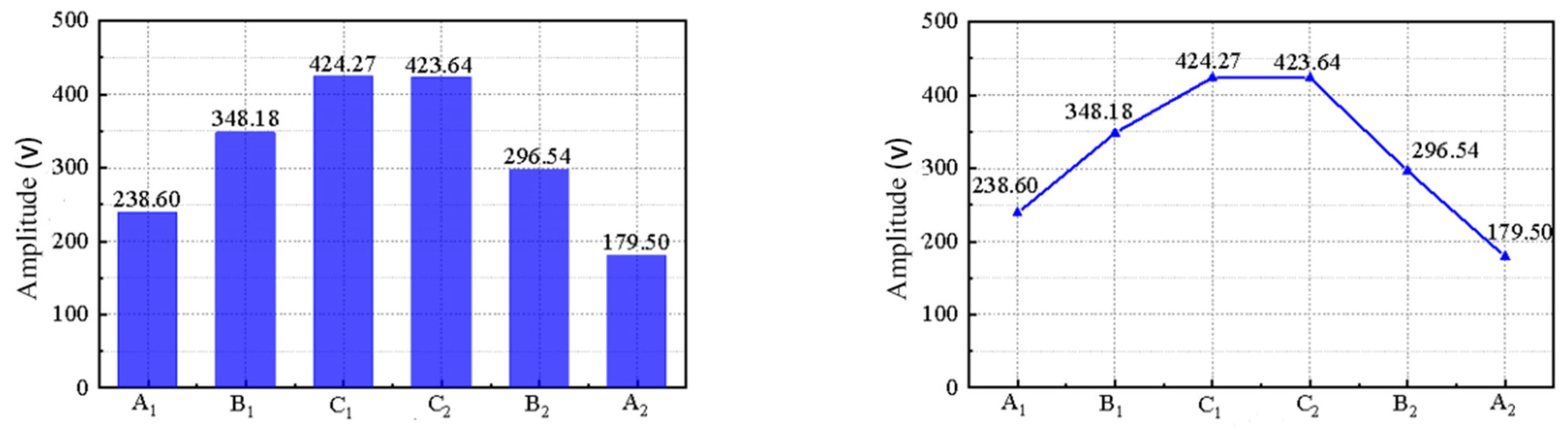
- Defect localization: By arranging symmetrical measuring points on both sides of the full grouting sleeve and comparing the reverse focus peaks, the general area of the defect can be located. Increasing the number of measuring points on both sides enhances the accuracy of defect localization, bringing the final positioning closer to the actual defect location.
- Semi−grouting sleeve detection: The Lamb−wave−based time reversal method remains effective in detecting defects, such as internal vacancy defects and reinforcement deviation, in semi−grouting sleeves. However, due to the asymmetric structure of the semi−grouting sleeve, defect positions cannot be accurately located by arranging multiple symmetric measuring points.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Quaegebeur, N.; Ostiguy, P.C.; Masson, P. Correlation−based imaging technique for fatigue monitoring of riveted lap−joint structure. Smart Mater. Struct. 2014, 23, 055007. [Google Scholar] [CrossRef]
- Colin, H.; Michael, T. Enhanced damage localization for complex structures through statistical modeling and sensor fusion. Mech. Syst. Signal Process. 2015, 54–55, 195–209. [Google Scholar] [CrossRef]
- Kudela, P.; Radzienski, M.; Ostachowicz, W.; Yang, Z. Structural health monitoring system based on a concept of Lamb wave focusing by the piezoelectric array. Mech. Syst. Signal Process. 2018, 108, 21–32. [Google Scholar] [CrossRef]
- Nerio, T.; Fabio, M. Grouted sleeve connections used in precast reinforced concrete construction—Experimental investigation of a column−to−column joint. Eng. Struct. 2016, 127, 784–803. [Google Scholar] [CrossRef]
- Zhuang, Z.Y. Application of prefabricated building sleeve grouting technology in the construction of house construction engineering. Constr. Technol. 2022, 463, 64–67. [Google Scholar] [CrossRef]
- Golub, M.V.; Fomenko, S.I.; Shpak, A.N.; Gu, Y.; Wang, Y.; Zhang, C. Semi−analytical hybrid approach for modelling smart structures and guided wave−based SHM systems for a laminate with multip−le delaminations and surface−mounted inhomogeneities. Appl. Math. Model. 2023, 120, 812–832. [Google Scholar] [CrossRef]
- Abbas, M.; Shafiee, M. Structural Health Monitoring (SHM) and Determination of Surface Defects in Large Metallic Structures using Ultrasonic Guided Waves. Sensors 2018, 18, 3958. [Google Scholar] [CrossRef]
- El Mountassir, M.; Yaacoubi, S.; Mourot, G.; Maquin, D. An adaptive PCA−based method for more reliable ultrasonic guided waves SHM: Data−driven modeling and experimental validation in high attenuating medium. Struct. Control Health Monit. 2020, 28, e2634. [Google Scholar] [CrossRef]
- Cantero−Chinchilla, S.; Chiachío, J.; Chiachío, M.; Chronopoulos, D.; Jones, A. A robust Bayesian methodology for damage localization in plate−like structures using ultrasonic guidedwaves. Mech. Syst. Signal Process. 2018, 122, 192–205. [Google Scholar] [CrossRef]
- Kim, D.; Choi, M.; Han, S.; Jeong, J. Determination of Partial Depth Repair Size for Spalling of Jointed Concrete Pavements Using the Impact Echo Method. Sustainability 2022, 14, 8143. [Google Scholar] [CrossRef]
- Bahati, P.A.; Le, V.D.; Lim, Y.J. An impact echo method to detect cavities between railway track slabs and soil foundation. J. Eng. Appl. Sci. 2021, 68, 7. [Google Scholar] [CrossRef]
- Zhang, J.; Huang, Y.; Song, L.-P.; Liu, Q.-H. Fast and accurate 3−D ray tracing using bilinear traveltime interpolation and the wave front group marching. Geophys. J. Int. 2011, 184, 1327–1340. [Google Scholar] [CrossRef]
- Raghavan, A.; Cesnik, C.E.S. Finite−dimensional piezoelectric transducer modeling for guided wave based structural health monitoring. Smart Mater. Struct. 2005, 14, 1448–1461. [Google Scholar] [CrossRef]
- Montinaro, N.; Cerniglia, D.; Pitarresi, G. Evaluation of interlaminar delaminations in titanium−graphite fibre metal laminates by infrared NDT techniques. NDT E Int. 2018, 98, 134–164. [Google Scholar] [CrossRef]
- Yee, A.; Eng, H.D. Structural and economic benefits of precast/prestressed concrete construction. PCI J. 2001, 46, 34–43. [Google Scholar] [CrossRef]
- Baggens, O.; Ryden, N. Poisson’s ratio from polarization of acoustic zero−group velocity Lamb mode. J. Acoust. Soc. Am. 2015, 138, 88–92. [Google Scholar] [CrossRef]
- Xu, X.; Zhang, F.; Li, Y.F. Damage classification and localization in plates based on improved full−focused imaging with nonlinear Lamb waves. J. Nanjing Univ. 2022, 58, 894–903. [Google Scholar] [CrossRef]
- Jonas, K.R.; Justina, S.; Egidijus, Z. Numerical Investigation of Excitation of Vario−us Lamb Waves Modes in Thin Plastic Films. Appl. Sci. 2022, 12, 849. [Google Scholar] [CrossRef]
- Hu, Y. Quality Detection of Grouting Sleeve Connection Based on Lamb Wave Time Inversion Method. Master’s Thesis, Fuzhou University, Fuzhou, China, 2021. [Google Scholar] [CrossRef]
- Lamb, H. On Waves in an Elastic Plate Review of Vibration−based Helicopters Health and Usage Monitoring Methods. Proc. R. Soc. 1917, 93, 114–128. [Google Scholar] [CrossRef]
- Munian, R.K.; Mahapatra, D.R.; Gopalakrishnan, S. Lamb wave interaction with composite delamination. Compos. Struct. 2018, 206, 484–498. [Google Scholar] [CrossRef]
- Jayant, S. Fundamental Understanding of Piezoelectric Strain Sensors. J. Intell. Mater. Syst. Struct. 2000, 11, 246–257. [Google Scholar] [CrossRef]
- JGJ 1−2014; Technical Specification for Assembled Concrete Structure. China Architecture and Building Press: Beijing, China, 2014. (In Chinese)







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Material | E (MPa) | ρ (kg/m3) | Poisson Ratio υ |
|---|---|---|---|
| Cement | 33,000 | 2400 | 0.2 |
| Cast iron sleeve | 150,000 | 7500 | 0.25 |
| Connected bar | 20,000 | 7000 | 0.2 |
| External concrete | 31,000 | 2500 | 0.2 |
| Model | Steel Bar Diameter | The Outer Diameter of the Sleeve | Wall Thickness | The Depth of Rebar Insertion | Threaded Hole Diameter |
|---|---|---|---|---|---|
| GTZ B4−36C | 36 | 71 | 6 | 288 | 30 |
| Material | E (MPa) | ρ (kg/m3) | Poisson Ratio υ |
|---|---|---|---|
| cement | 33,000 | 2400 | 0.2 |
| Cast iron sleeve | 150,000 | 7500 | 0.25 |
| connected bar | 14,000 | 7000 | 0.2 |
| External concrete | 31,000 | 2500 | 0.2 |
| Working Condition Number | Grout Material Diameter (mm) | Defect Width (mm) | Defect Depth (mm) | Grout Section Damage Ratio |
|---|---|---|---|---|
| 1 | 62 | 0 | 0 | 0 |
| 2 | 62 | 630 | 10 | 10% |
| 3 | 62 | 630 | 16 | 20% |
| 4 | 62 | 630 | 21 | 30% |
| 5 | 62 | 630 | 26 | 40% |
| Working Condition Number | Defect Width (mm) | Defect Depth (mm) | Empty Position |
|---|---|---|---|
| 1 | 0 | 62 | 1/2 Equal |
| 2 | 10 | 62 | 1/2 Equal |
| 3 | 20 | 62 | 1/2 Equal |
| 4 | 30 | 62 | 1/2 Equal |
| 5 | 40 | 62 | 1/2 Equal |
| Working Condition Number | Defect Width (mm) | Defect Depth (mm) | Empty Position |
|---|---|---|---|
| 1 | 0 | 65 | Top of sleeve |
| 2 | 10 | 65 | Top of sleeve |
| 3 | 20 | 65 | Top of sleeve |
| 4 | 30 | 65 | Top of sleeve |
| 5 | 40 | 65 | Top of sleeve |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lin, W.; Wang, H.; Chen, S.; Lin, X.; Huang, J.; Wang, R. Time Reversal Method for Lamb−Wave−Based Diagnostics of Multiple−Sleeve Grouting Connections. Buildings 2023, 13, 2824. https://doi.org/10.3390/buildings13112824
Lin W, Wang H, Chen S, Lin X, Huang J, Wang R. Time Reversal Method for Lamb−Wave−Based Diagnostics of Multiple−Sleeve Grouting Connections. Buildings. 2023; 13(11):2824. https://doi.org/10.3390/buildings13112824
Chicago/Turabian StyleLin, Wei, Hongjie Wang, Shanghong Chen, Xin Lin, Jintu Huang, and Rong Wang. 2023. "Time Reversal Method for Lamb−Wave−Based Diagnostics of Multiple−Sleeve Grouting Connections" Buildings 13, no. 11: 2824. https://doi.org/10.3390/buildings13112824
APA StyleLin, W., Wang, H., Chen, S., Lin, X., Huang, J., & Wang, R. (2023). Time Reversal Method for Lamb−Wave−Based Diagnostics of Multiple−Sleeve Grouting Connections. Buildings, 13(11), 2824. https://doi.org/10.3390/buildings13112824