
Research on 3D Defect Information Management of Drainage Pipeline Based on BIM





Abstract
:1. Introduction
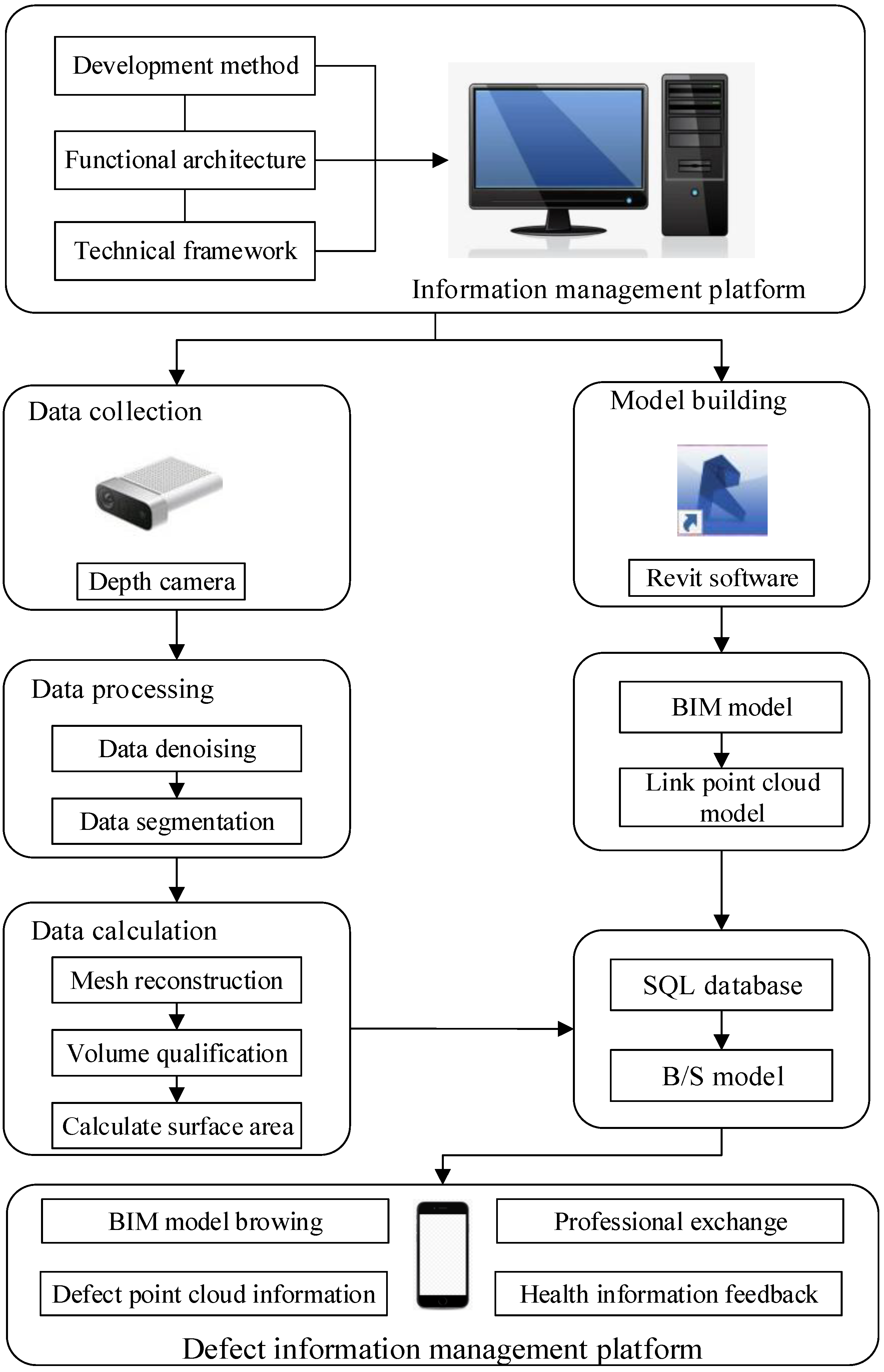
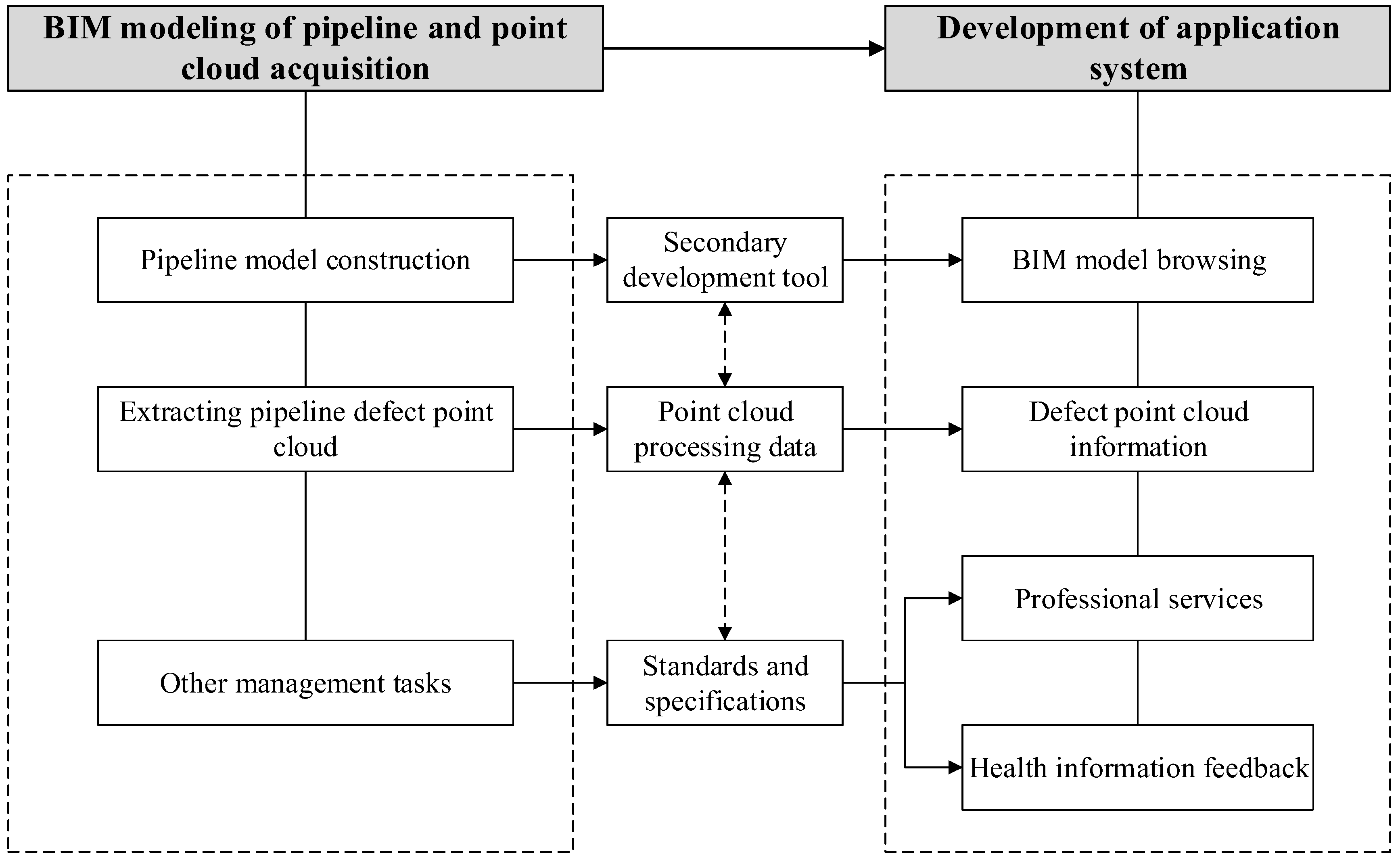
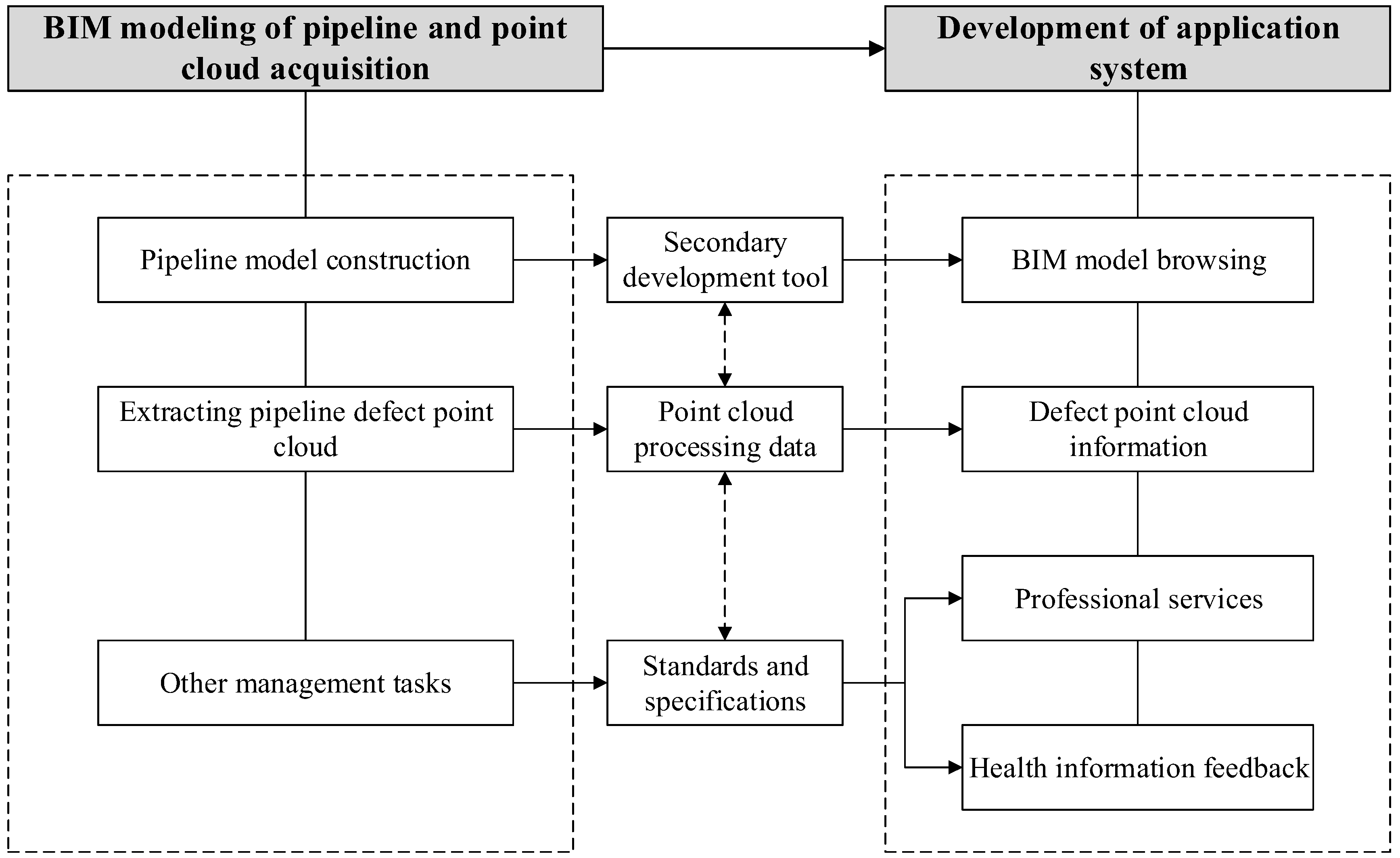
2. Research Framework
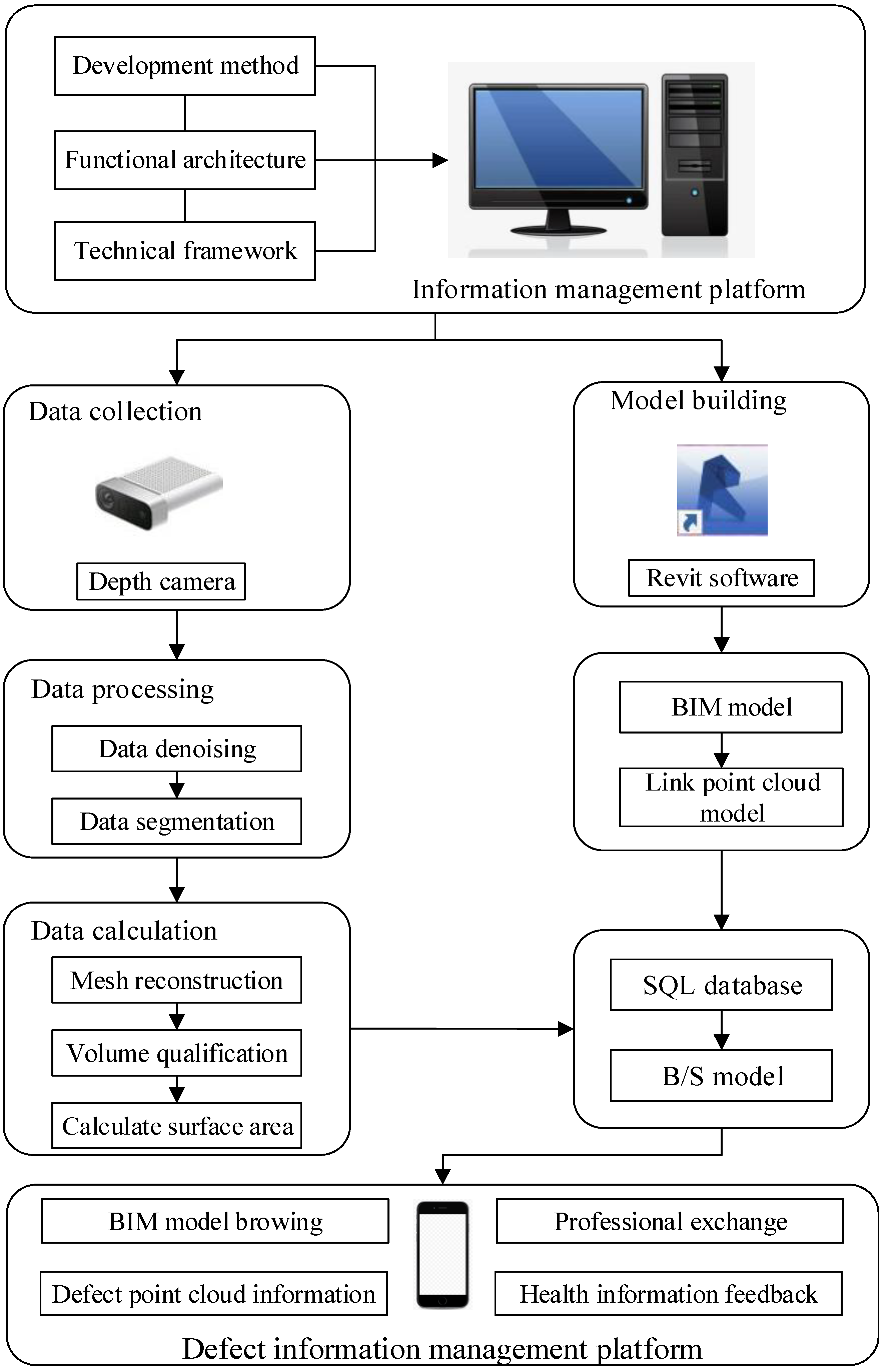
3. Methodology
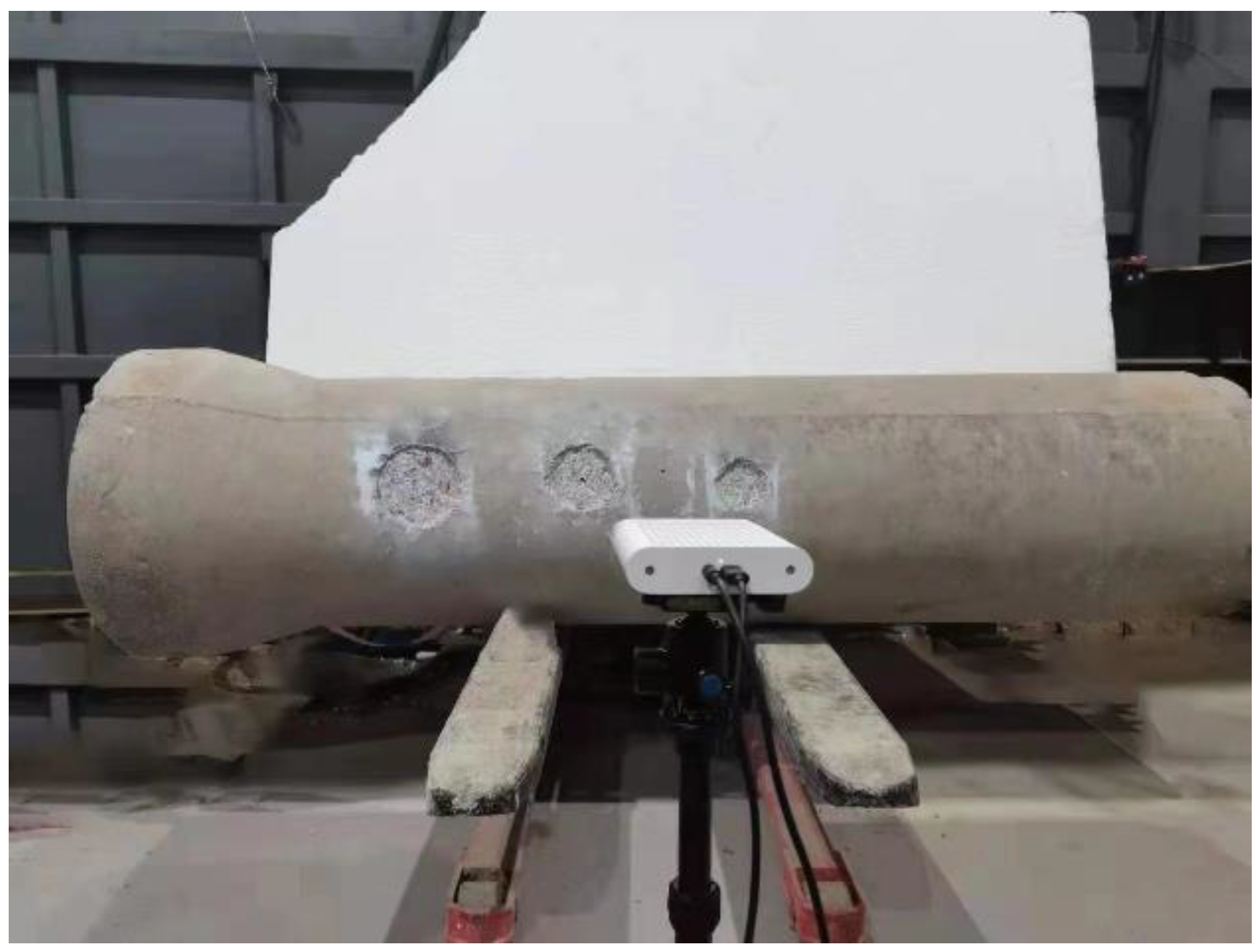
3.1. Data Collection
3.2. Data Processing
3.2.1. Data Denoising
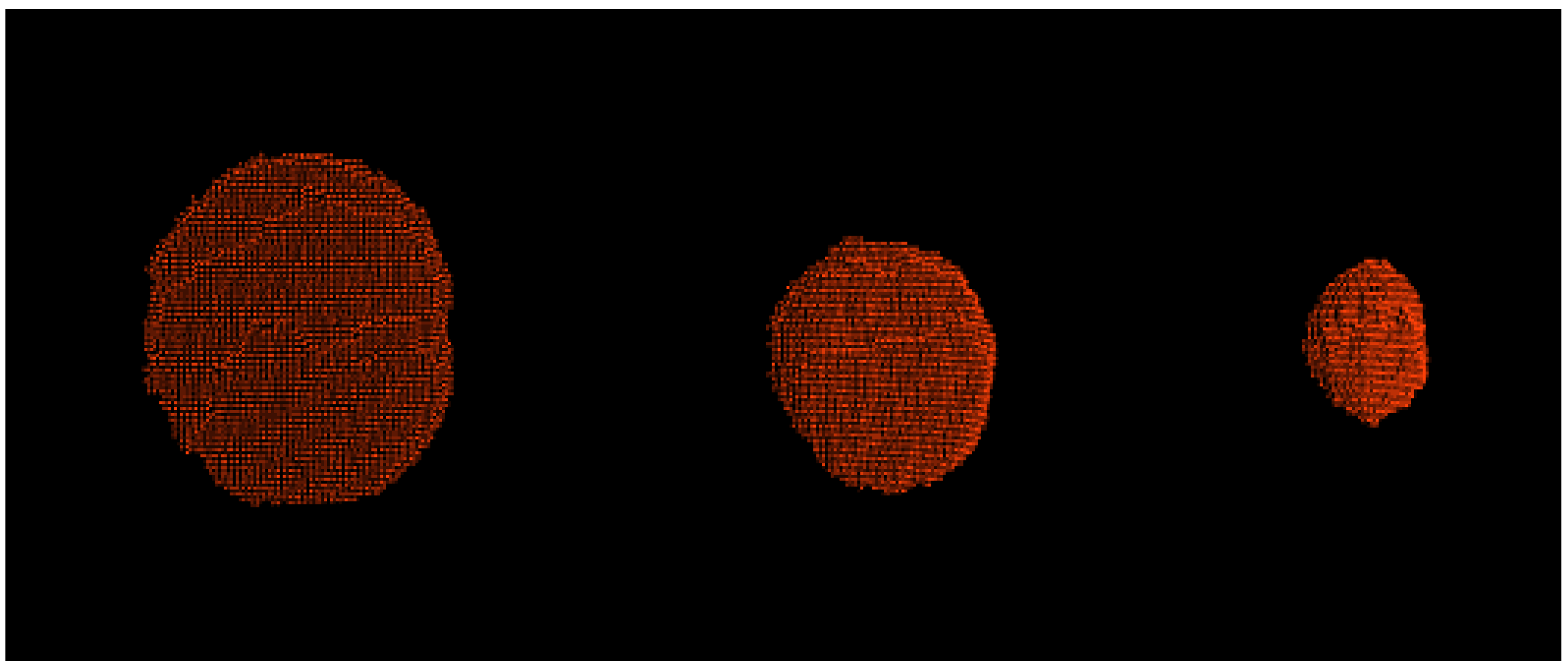
3.2.2. Data Segmentation
3.3. Data Calculation
3.4. Construction of the Platform
3.4.1. Development Method of the Platform
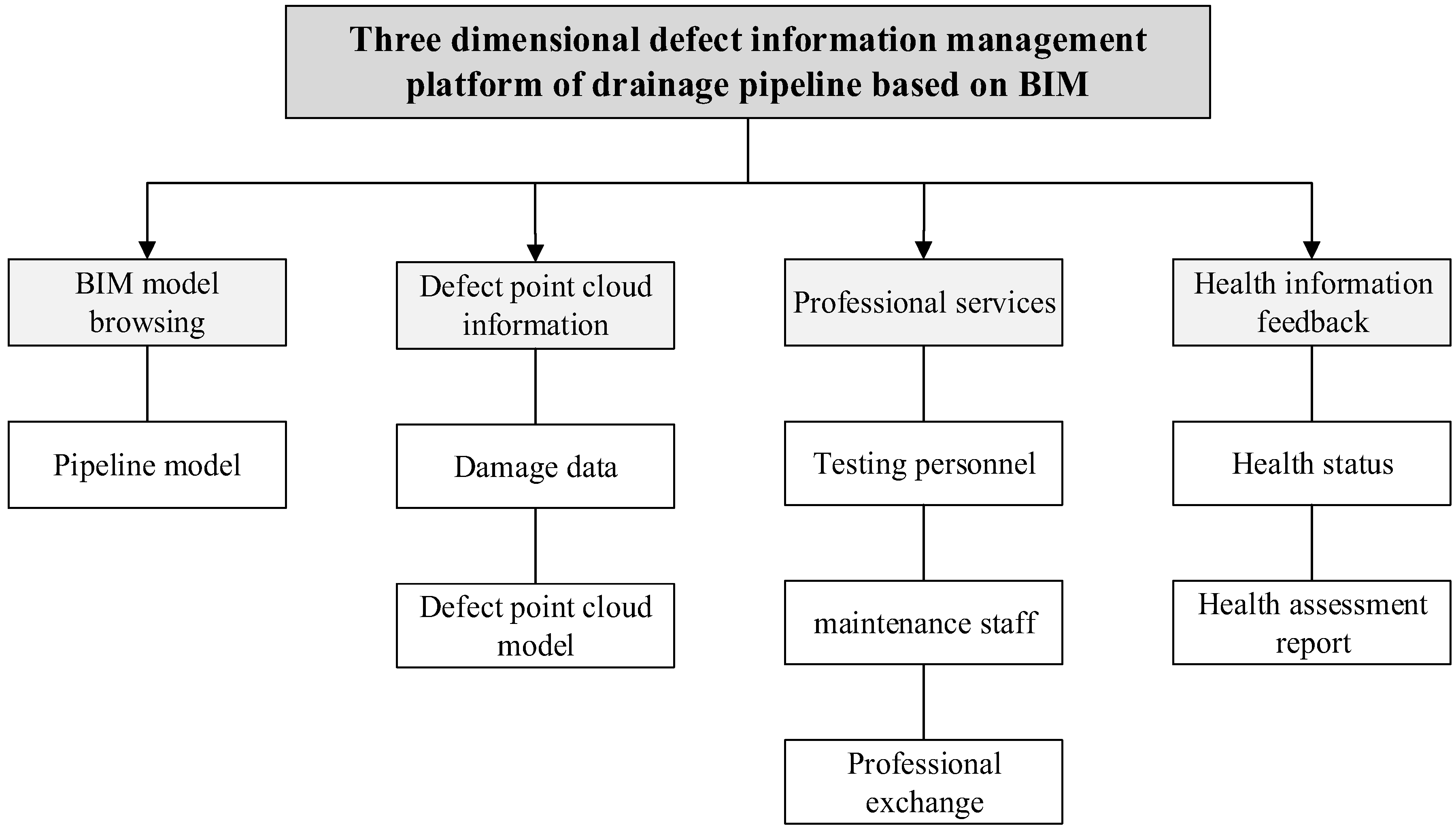
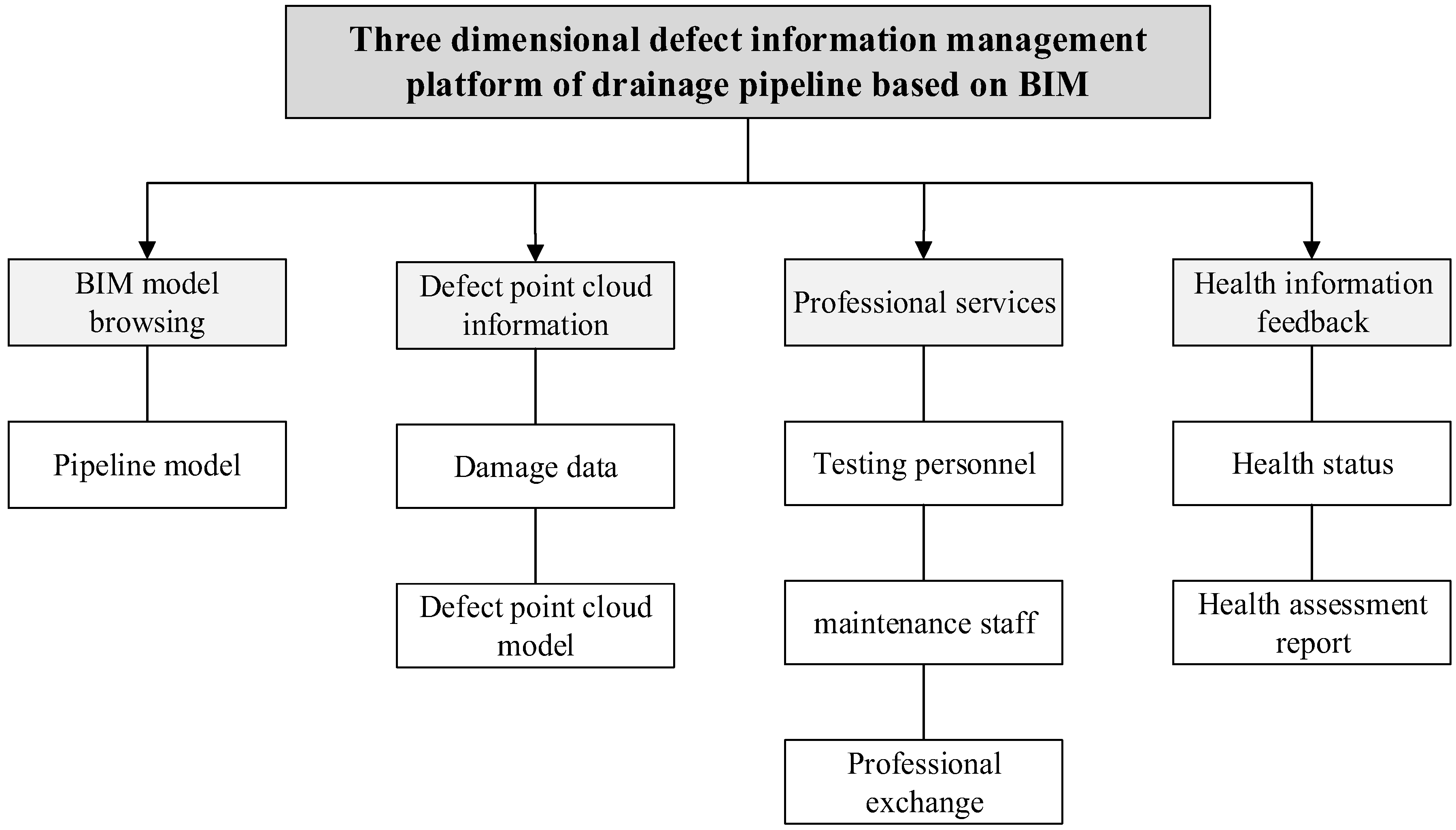
3.4.2. Functional Composition of the Platform
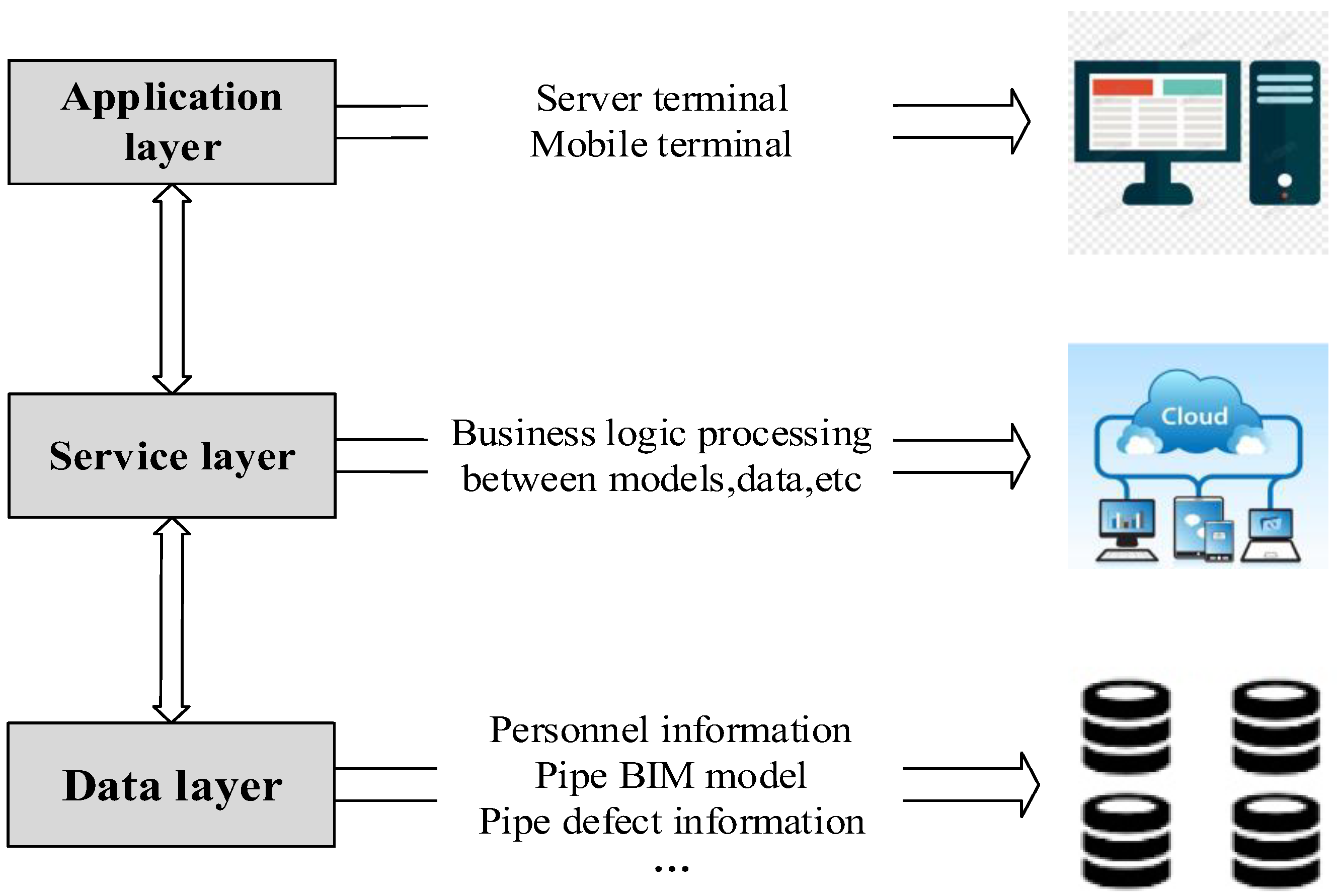
3.4.3. Overall Structure of the Platform
4. Experiments
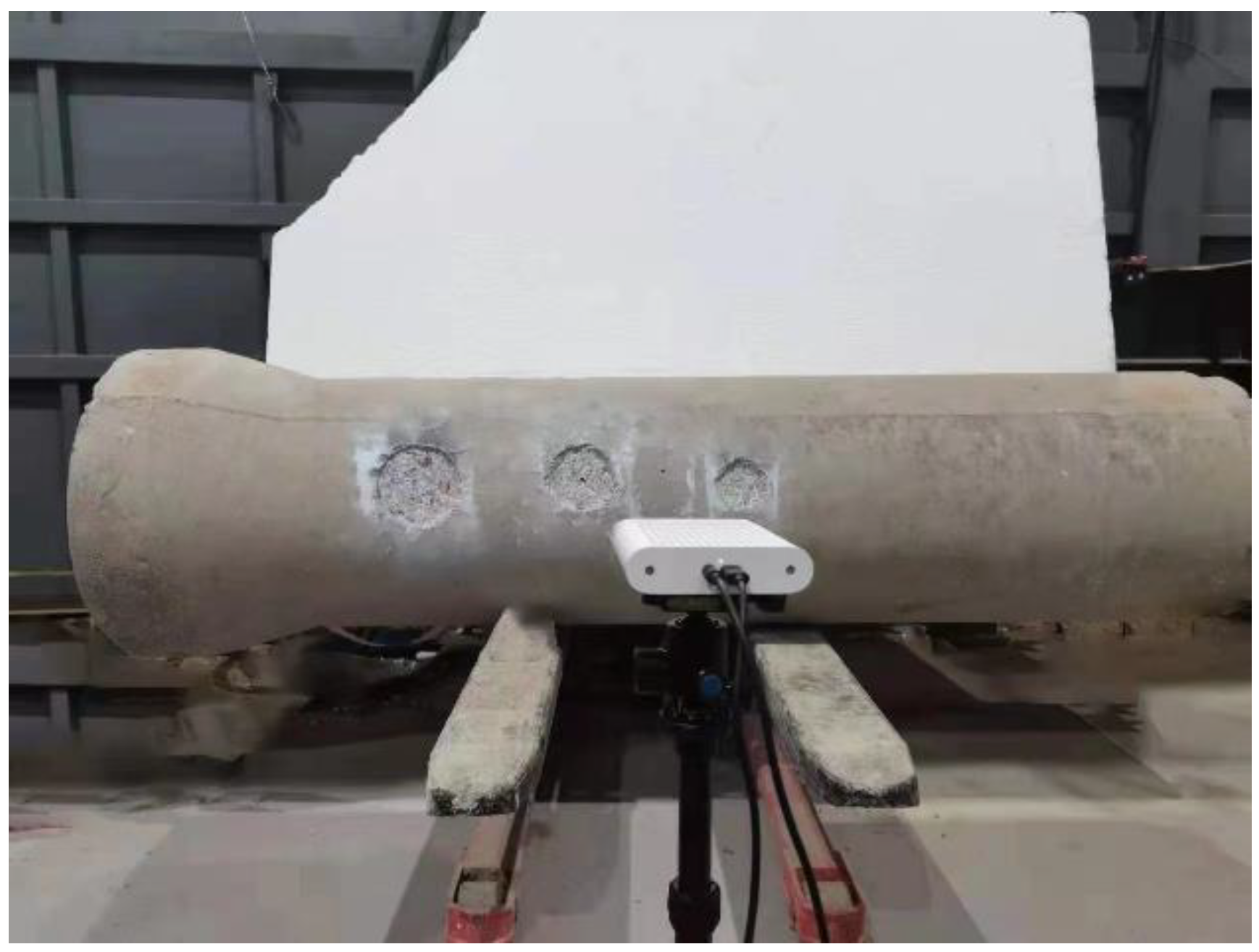
4.1. Data Collection
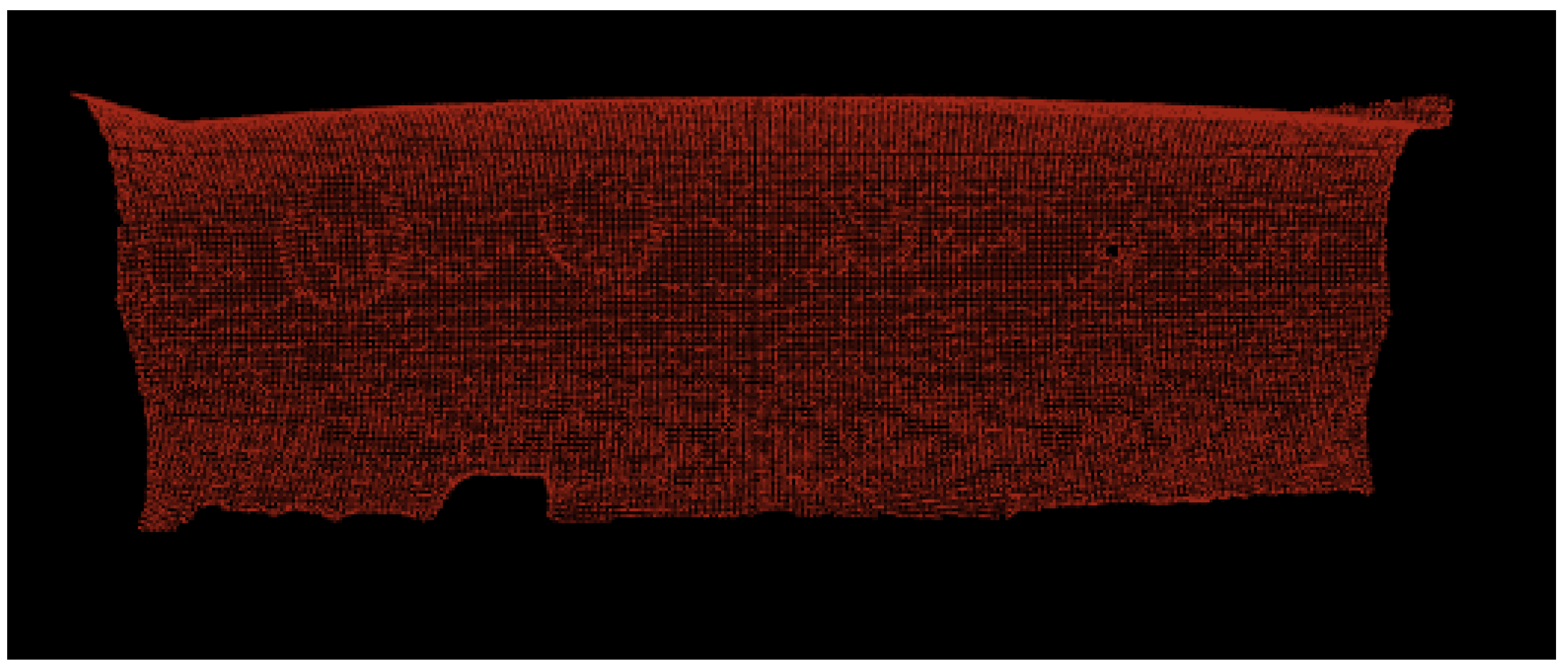
4.2. Data Processing
4.3. Damage Data Calculation
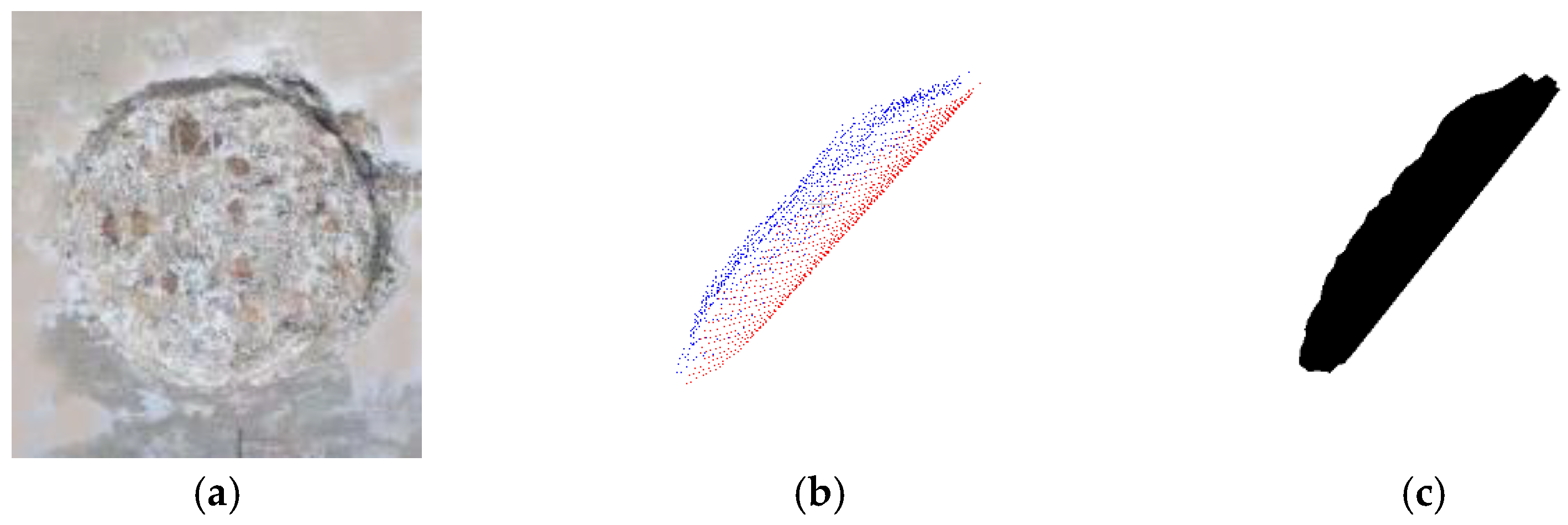
4.3.1. Damage Real Volume Measurement
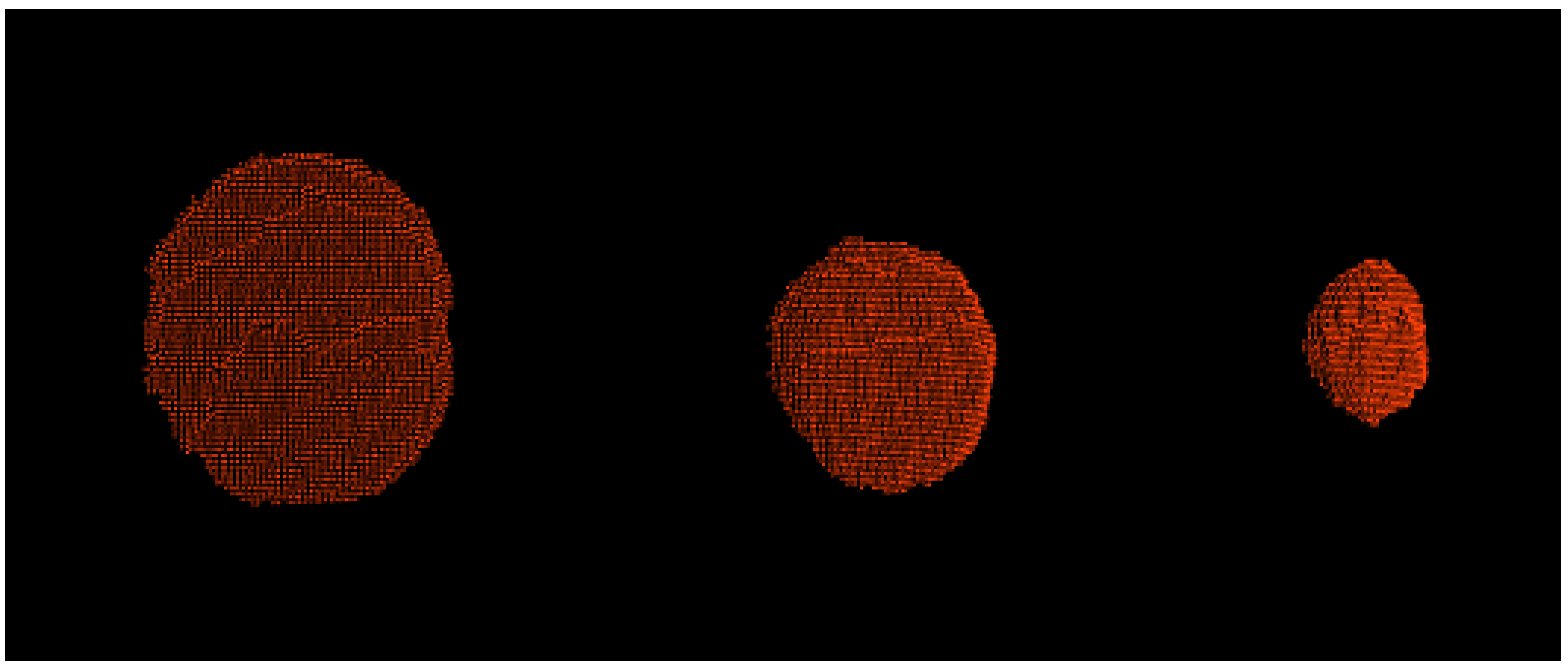
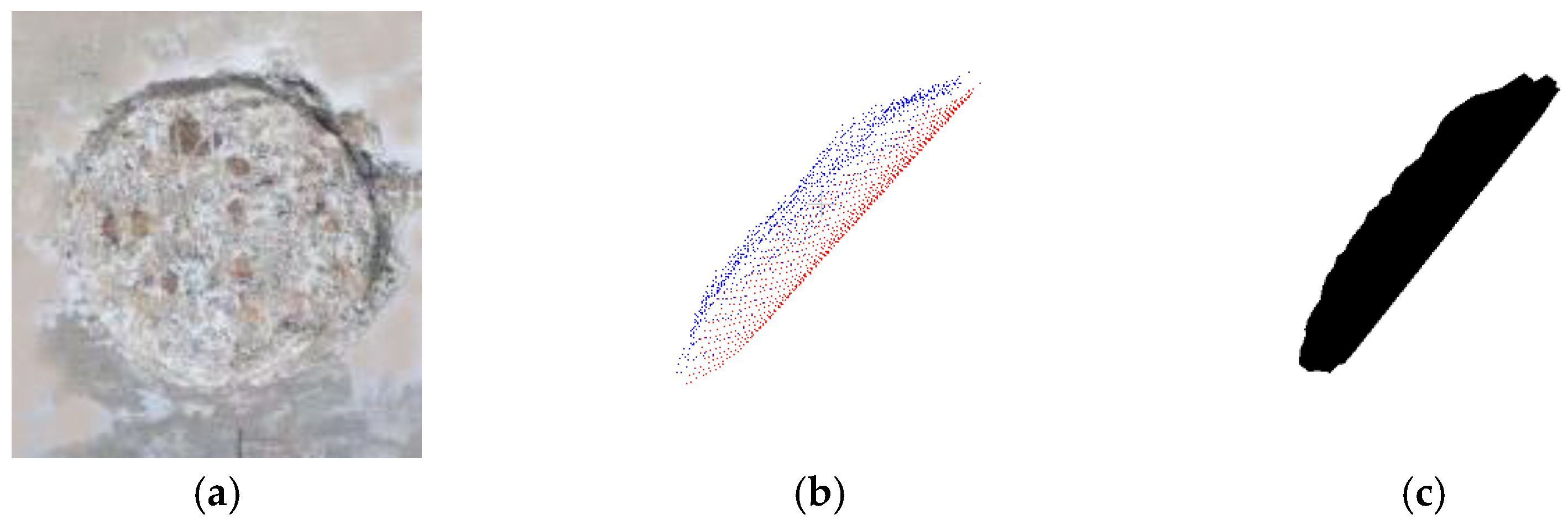
4.3.2. Damage Point Cloud Reconstruction
4.3.3. Quantification of Damage Volume
4.3.4. Calculation of Damage Surface Area
5. Results Discussion
6. Defect Information Management Platform
6.1. Model Construction
6.1.1. Creation of Pipeline BIM Model
6.1.2. BIM Model Combined with Point Cloud Data
6.2. The Platform Function
6.2.1. BIM Model Browsing
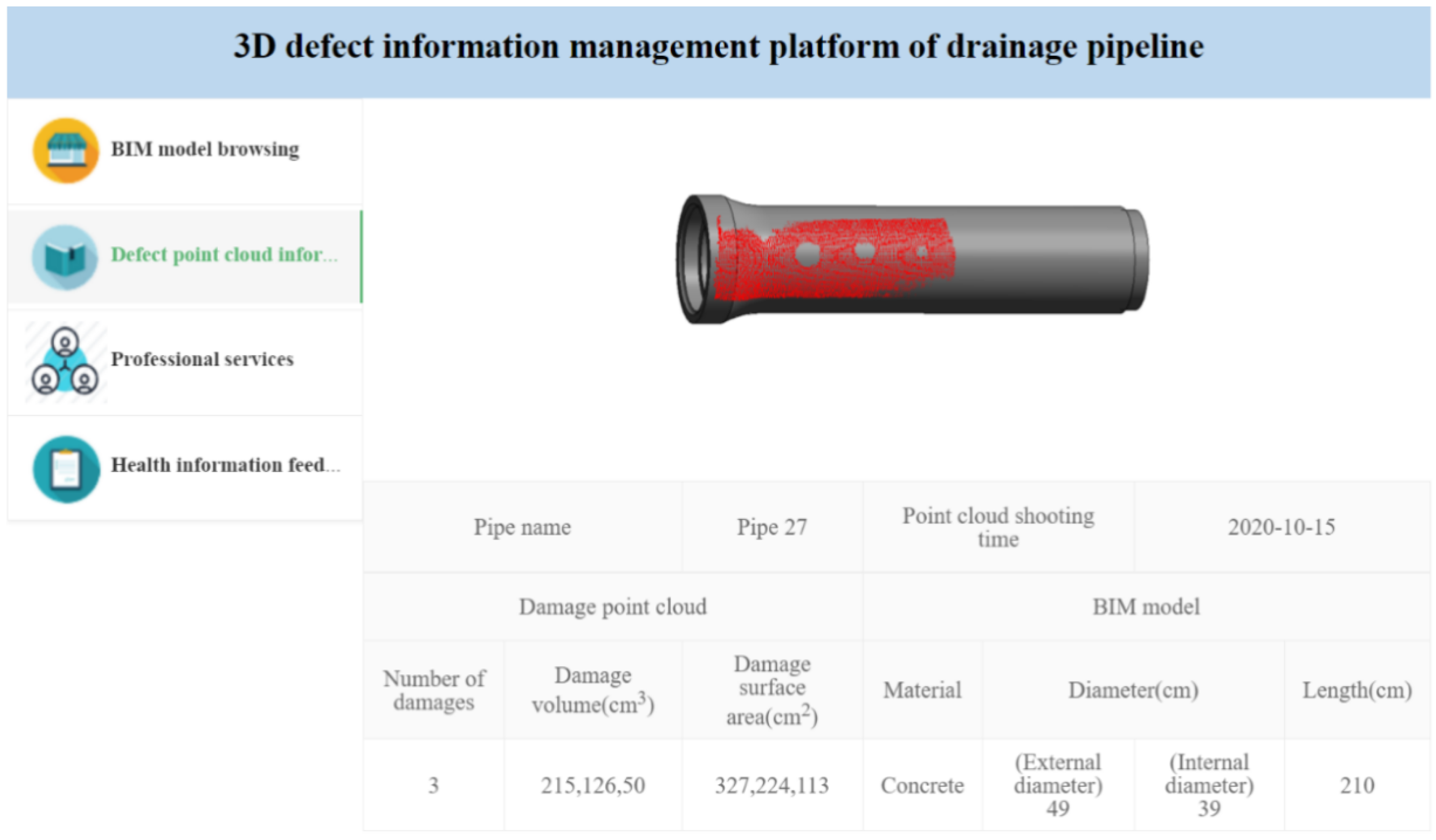
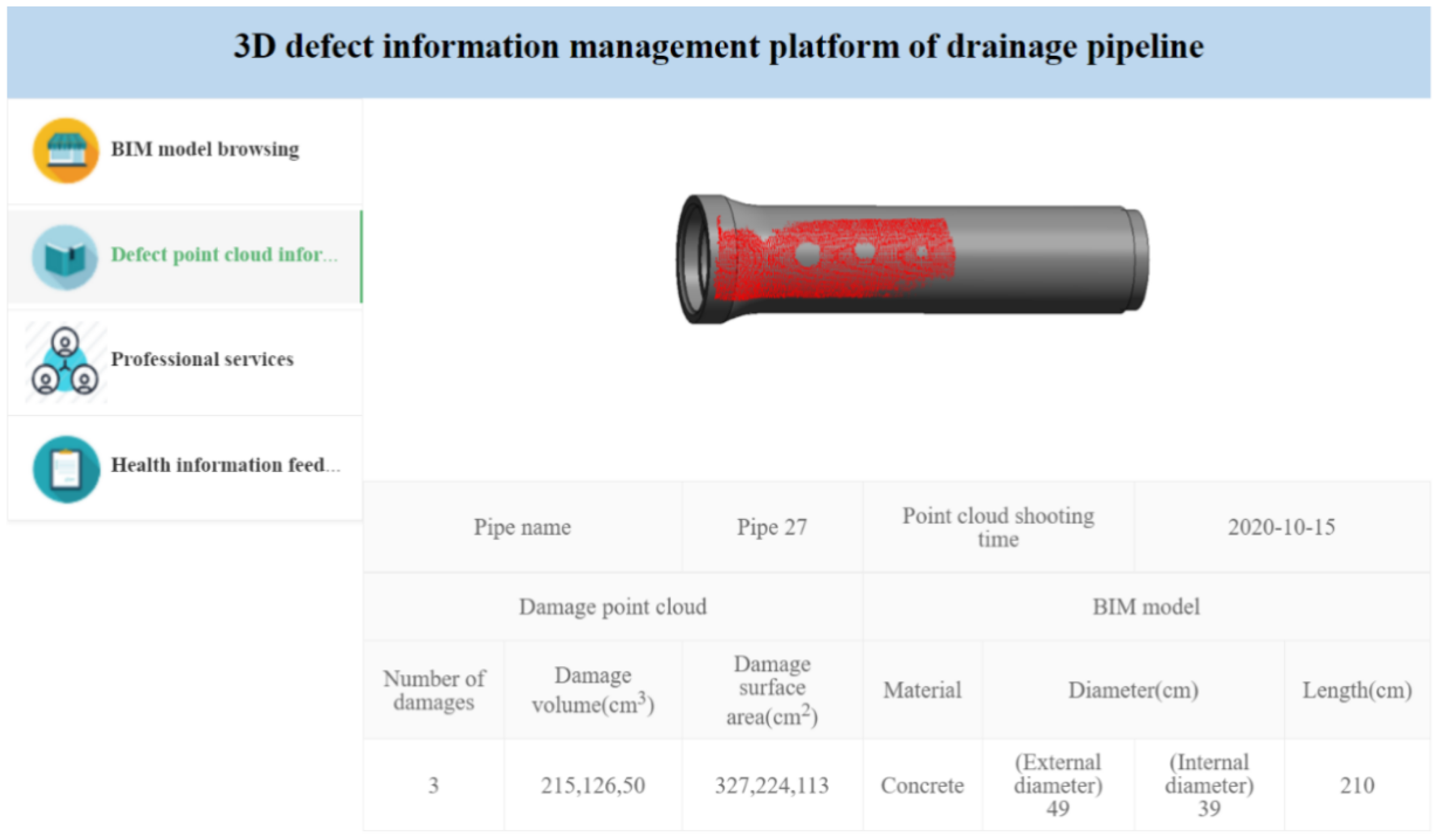
6.2.2. Defect Point Cloud Information
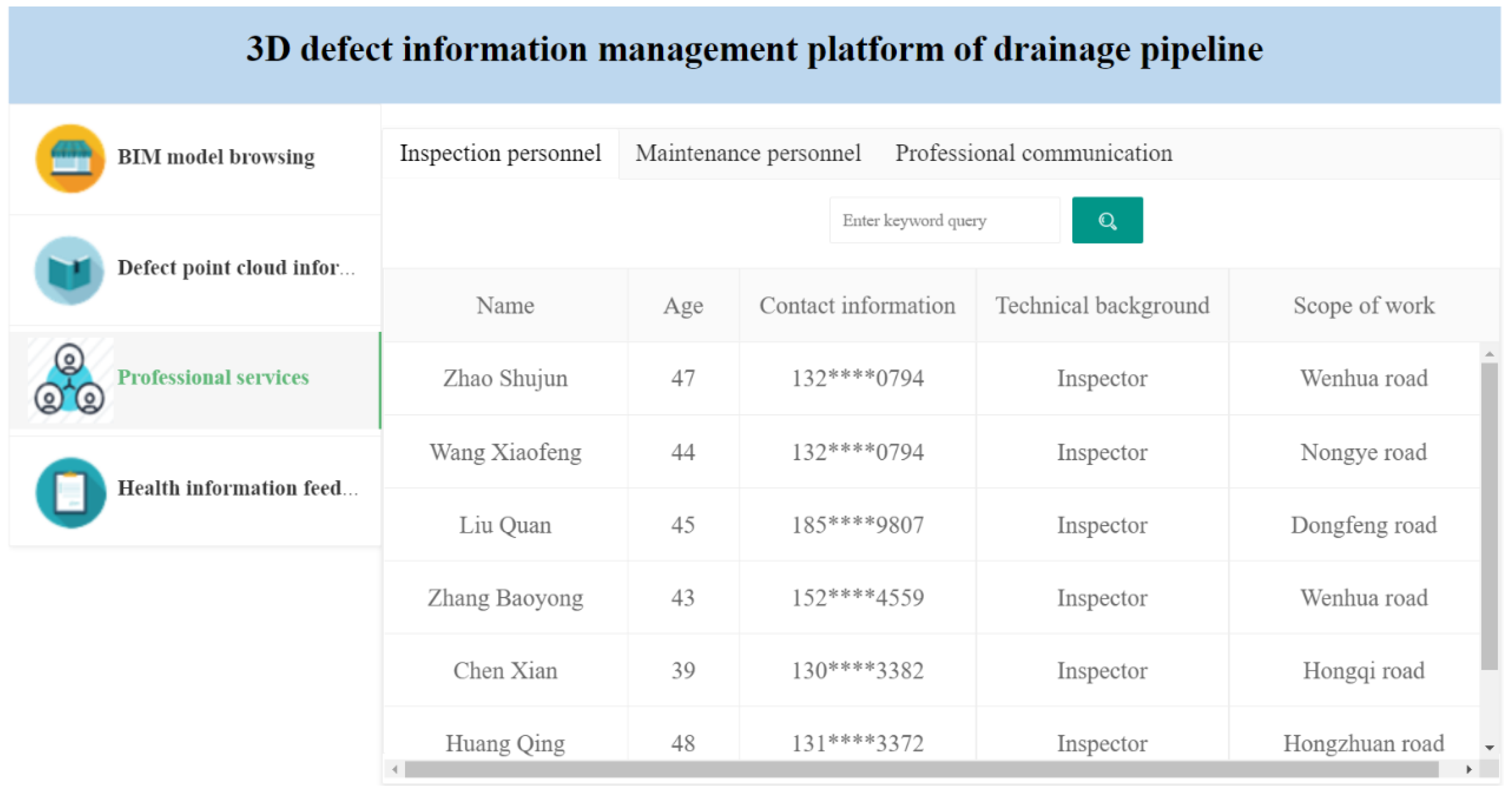
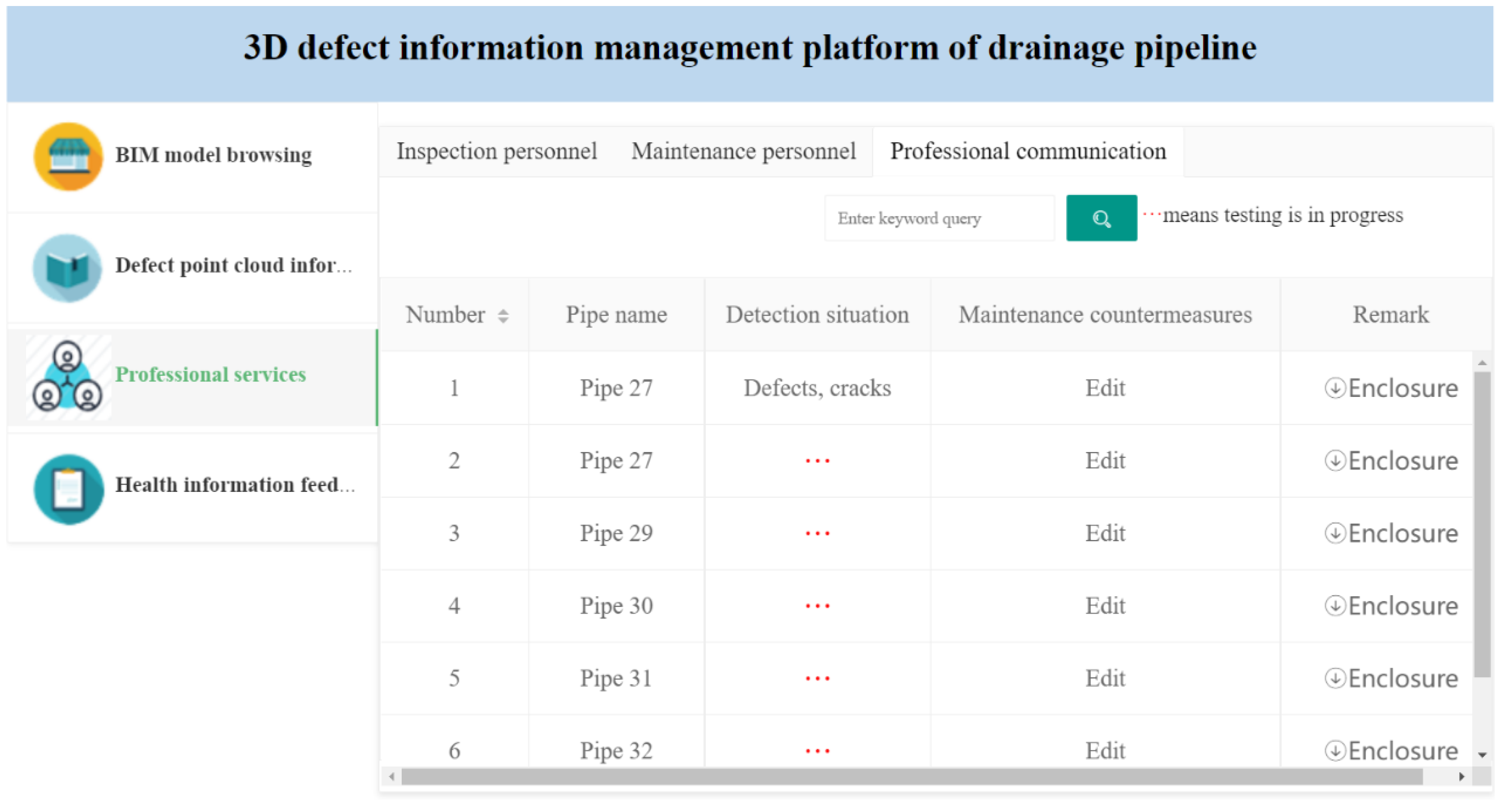
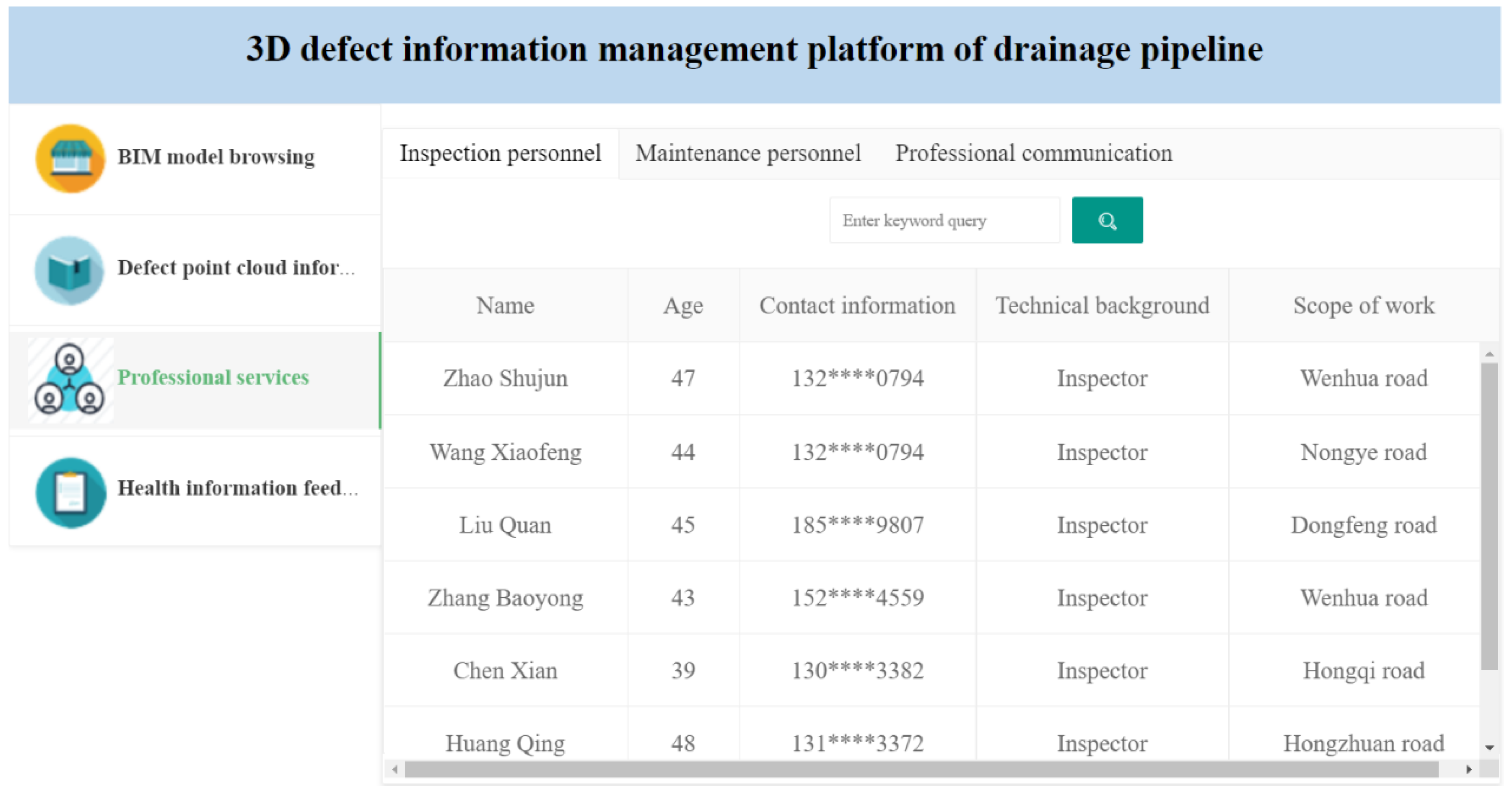
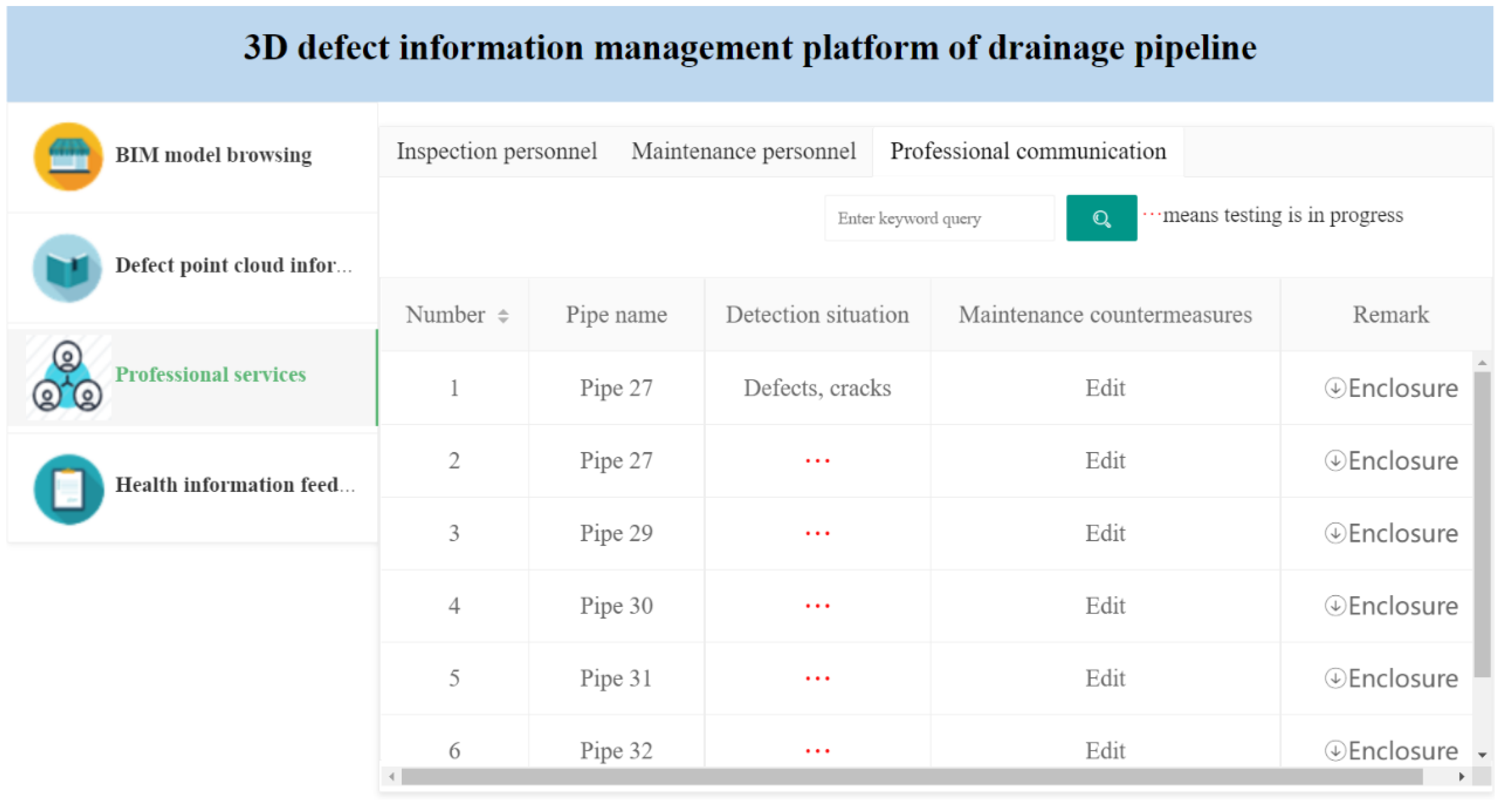
6.2.3. Professional Services
6.2.4. Health Information Feedback
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model data | |||
| Pipe name | |||
| Model link | |||
| Damage data | |||
| Pipe name | Point cloud shooting time | ||
| Material | Number of damages | ||
| Damage volume | Diameter | ||
| Model link | |||
| Professional communication | |||
| Pipe name | |||
| Detection situation | |||
| Maintenance countermeasures | |||
| Inspection personnel | |||
| Name | |||
| Age | |||
| Contact information | |||
| Technical background | |||
| Scope of work | |||
| Maintenance personnel | |||
| Name | |||
| Age | |||
| Contact information | |||
| Technical background | |||
| Scope of work | |||
| Health status | |||
| Pipe name | |||
| Health level | |||
| Service life | |||
References
- Liu, Q. Application and Development of Detection Technology for Urban Drainage Pipeline. Urban. Archit. 2019, 16, 148–149. [Google Scholar]
- Wang, X. Analysis on defect detection methods and development status of urban drainage pipeline. Railw. Constr. Technol. 2020, 58, 50–53. [Google Scholar]
- Wang, J.; Deng, Y.; Li, Y.; Zhang, X. Overview of drainage pipeline detection and defect identification technology. Sci. Technol. Eng. 2020, 20, 13520–13528. [Google Scholar]
- Li, H.-J. The Application of Pipeline CCTV Detection Technology in Urban Drainage Project. Manag. Technol. SME 2018, 6, 170–171. [Google Scholar]
- Li, W.-H. Development and Application of Urban Drainage Pipeline Inspection Technology. Guangzhou Archit. 2009, 37, 33–37. [Google Scholar]
- Peng, Z. Application of CCTV inspection technology in public drainage pipeline. Superv. Test Cost Constr. 2009, 2, 28–33. [Google Scholar]
- Ma, D.; Liu, J.; Fang, H.; Wang, N.; Zhang, C.; Li, Z.; Dong, J. A Multi-defect detection system for sewer pipelines based on StyleGAN-SDM and fusion CNN. Constr. Build. Mater. 2021, 312, 125385. [Google Scholar] [CrossRef]
- Wang, N.; Zhao, X.; Zou, Z.; Zhao, P.; Qi, F. Autonomous damage segmentation and measurement of glazed tiles in historic buildings via deep learning. Comput.-Aided Civ. Infrastruct. Eng. 2020, 35, 277–291. [Google Scholar] [CrossRef]
- Wang, M.; Wang, C.C.; Zlatanova, S.; Sepasgozar, S.; Aleksandrov, M. Onsite Quality Check for Installation of Prefabricated Wall Panels Using Laser Scanning. Buildings 2021, 11, 412. [Google Scholar] [CrossRef]
- Nowak, R.; Orłowicz, R.; Rutkowski, R. Use of TLS (LiDAR) for building diagnostics with the example of a historic building in Karlino. Buildings 2020, 10, 24. [Google Scholar] [CrossRef] [Green Version]
- Zheng, J.; Guan, H.; Yi, W.; Sun, M. 3D Reconstruction of Small-sized Cultural Relics Based on Laser Scanning and Close-range Photogrammetry. Int. J. Digit. Content Technol. Its Appl. 2012, 6, 196–205. [Google Scholar]
- Ren, Z.Y. A Study on 3D Reconstruction of Building Structure. Tech. Autom. Appl. 2019, 38, 117–123. [Google Scholar]
- Andrikos, I.O.; Sakellarios, A.I.; Siogkas, P.K.; Tsompou, P.I.; Kigka, V.I.; Michalis, L.K.; Fotiadis, D.I. A Novel Method for 3D Reconstruction of Coronary Bifurcation Using Quantitative Coronary Angiography; Springer: Berlin/Heidelberg, Germany, 2019. [Google Scholar]
- Beckman, G.H.; Polyzois, D.; Cha, Y.J. Deep learning-based automatic volumetric damage quantification using depth camera. Autom. Constr. 2019, 99, 114–124. [Google Scholar] [CrossRef]
- Liu, C.; Zhou, L.; Wang, W.; Zhao, X. Concrete Surface Damage Volume Measurement based on Three-dimensional Reconstruction by Smartphones. IEEE Sens. J. 2021, 21, 11349–11360. [Google Scholar] [CrossRef]
- Jahanshahi, M.R.; Jazizadeh, F.; Masri, S.F.; Becerik-Gerber, B. Unsupervised approach for autonomous pavement-defect detection and quantification using an inexpensive depth sensor. J. Comput. Civ. Eng. 2013, 27, 743–754. [Google Scholar] [CrossRef]
- Asadi, P.; Mehrabi, H.; Asadi, A.; Ahmadi, M. Deep Convolutional Neural Networks for Pavement Crack Detection Using an Inexpensive Global Shutter RGB-D Sensor and ARM-Based Single Board Computer. Transp. Res. Rec. J. Transp. Res. Board 2021, 2675, 885–897. [Google Scholar] [CrossRef]
- Moazzam, I.; Kamal, K.; Mathavan, S.; Usman, S.; Rahman, M. Metrology and visualization of potholes using the microsoft kinect sensor. In Proceedings of the 16th International IEEE Conference on Intelligent Transportation Systems, The Hague, The Netherlands, 6–9 October 2013. [Google Scholar]
- Turkan, Y.; Hong, J.; Laflamme, S.; Puri, N. Adaptive wavelet neural network for terrestrial laser scanner-based crack detection. Autom. Constr. 2018, 94, 191–202. [Google Scholar] [CrossRef] [Green Version]
- Chen, L.; Shi, P.; Tang, Q.; Liu, W.; Wu, Q. Development and application of a specification-compliant highway tunnel facility management system based on BIM. Tunn. Undergr. Space Technol. 2020, 97, 103262. [Google Scholar] [CrossRef]
- Qian, Z.; Li, Y.; Chen, Y. Research on Bridge Deck Health Assessment System Based on BIM and Computer Vision Technology. J. Phys. Conf. Ser. 2021, 1802, 042047. [Google Scholar] [CrossRef]
- Lai, H.; Deng, X.; Chang, T. BIM-Based Platform for Collaborative Building Design and Project Management. J. Comput. Civ. Eng. 2019, 33, 05019001. [Google Scholar] [CrossRef]
- Chen, J.; Guo, X.; Rao, H.; Wu, F. Application of 3DVisualization of Underground Pipeline Based on BIM Technology. Chin. J. Eng. Geophys. 2018, 15, 65–72. [Google Scholar]
- Xu, W.; Zhou, Y. Application of BIM + GIS Used in Information Management of Underground Pipeline Network in University Campus. Constr. Technol. 2017, 6, 58–60. [Google Scholar]
- Liang, Z. Integrated Application of BIM and Robot Total Station in the Construction of Underground Pipelines. Constr. Technol. 2016, 45, 27–31. [Google Scholar]
- Guo, H.; Guo, F.; Tian, G. Research on application path of building information modeling (BIM) technology in construction of visualization of urban pipe gallery. Revista de la Facultad de Ingenieria 2017, 32, 631–637. [Google Scholar]
- Ding, L.; Zhou, D.; Wang, C.; Zui, W. Development and application of pipeline information management platform based on BIM technology. Cryog. Constr. Technol. 2021, 43, 120–123. [Google Scholar]
- Lee, G.C.; Yoo, J. Real-time Virtual-viewpoint Image Synthesis Algorithm Using Kinect Camera. J. Electr. Eng. Technol. 2014, 38, 1016–1022. [Google Scholar] [CrossRef] [Green Version]
- Zhu, G.; Minl, Y.E. Research on the method of point cloud denoising based on curvature characteristics and quantitative evaluation. Bull. Surv. Mapp. 2019, 65, 105–108. [Google Scholar]
- Luo, N.; Jiang, Y.; Wang, Q. Supervoxel Based Region Growing Segmentation for Point Cloud Data. Int. J. Pattern Recognit. Artif. Intell. 2020, 35, 2154007. [Google Scholar] [CrossRef]
- Zhang, J.; Zhao, X.; Chen, Z.; Lu, Z. A Review of Deep Learning-Based Semantic Segmentation for Point Cloud. IEEE Access 2019, 7, 179118–179133. [Google Scholar] [CrossRef]
- Li, L.; Qian, B.; Lian, J.; Zheng, W.; Zhou, Y. Traffic Scene Segmentation Based on RGB-D Image and Deep Learning. IEEE Trans. Intell. Transp. Syst. 2017, 19, 1664–1669. [Google Scholar] [CrossRef]
- Chetverikov, D.; Stepanov, D.; Krsek, P. Robust Euclidean alignment of 3D point sets: The trimmed iterative closest point algorithm. Image Vis. Comput. 2005, 23, 299–309. [Google Scholar] [CrossRef]
- Tian, Y.; Zhou, X.; Wang, X.; Wang, Z.; Yao, H. Registration and occlusion handling based on the FAST ICP-ORB method for augmented reality systems. Multimed. Tools Appl. 2021, 80, 21041–21058. [Google Scholar] [CrossRef]
- Jiang, Y.; Liu, X.; Liu, F.; Wu, D.; Anumba, C.J. An analysis of BIM web service requirements and design to support energy efficient building lifecycle. Buildings 2016, 6, 20. [Google Scholar] [CrossRef] [Green Version]
- Fargnoli, M.; Lombardi, M. Building information modelling (BIM) to enhance occupational safety in construction activities: Research trends emerging from one decade of studies. Buildings 2020, 10, 98. [Google Scholar] [CrossRef]
- Fargnoli, M.; Lleshaj, A.; Lombardi, M.; Sciarretta, N.; Gravio, G.D. A BIM-based PSS approach for the management of maintenance operations of building equipment. Buildings 2019, 9, 139. [Google Scholar] [CrossRef] [Green Version]
- Wang, N.; Zhao, X.; Wang, L.; Zou, Z. Novel system for rapid investigation and damage detection in cultural heritage conservation based on deep learning. J. Infrastruct. Syst. 2019, 25, 04019020. [Google Scholar] [CrossRef]
- Arévalo, J.G.; Viecco, L.; Arévalo, L. Methodology to define an integration process between frameworks SCRUM, Django REST framework y Vue.js, implemented for software development, from quality management approach and agility. IOP Conf. Ser. Mater. Sci. Eng. 2020, 844, 012022. [Google Scholar] [CrossRef]
- Cao, T.; Zhou, Y.; Zhang, Q.; Liu, L. Dimension change of Jeltrate alginate impression at various pouring time points. Stomatology 2013, 33, 165–167. [Google Scholar]
- Babic, S.; Kerr, A.T.; Westerland, M.; Gooding, J.; Schreiner, L.J. Examination of Jeltrate® Plus as a tissue equivalent bolus material. J. Appl. Clin. Med. Phys. 2002, 3, 170–175. [Google Scholar] [CrossRef]





| Azure Kinect DK Depth Camera | |
|---|---|
| RGB camera resolution | 2560 × 1540 |
| Depth camera resolution | 640 × 576 |
| Frame rate | 0, 5, 15, 30 |
| Detection distance range | 0.5–3.86 m |
| Measuring angle range | 65° × 75° |
| Damage | 1 | 2 | 3 |
|---|---|---|---|
| Volume (cm3) | 50.5 | 125.3 | 213.6 |
| 50.2 | 126.9 | 214.5 | |
| 50.1 | 125.8 | 215.3 | |
| Average volume (cm3) | 50.3 | 126.0 | 214.5 |
| Distance (cm) | 100 | 125 | 150 | 175 | 200 | |
|---|---|---|---|---|---|---|
| 1 | Real volume (cm3) | 50.3 | ||||
| Calc. volume (cm3) | 48.7 | 48.9 | 47.5 | 46.5 | 47.4 | |
| Error (%) | 3.18 | 2.78 | 5.57 | 7.55 | 5.77 | |
| 2 | Real volume (cm3) | 126.0 | ||||
| Calc.volume (cm3) | 115.5 | 129.4 | 103.9 | 123.5 | 110.6 | |
| Error (%) | 8.73 | 2.70 | 17.54 | 1.98 | 12.22 | |
| 3 | Real volume (cm3) | 214.5 | ||||
| Calc. volume (cm3) | 198.8 | 199.5 | 228.3 | 183.3 | 187.2 | |
| Error (%) | 7.32 | 6.99 | 6.43 | 14.55 | 12.73 | |
| Average error (%) | 6.41 | 4.16 | 9.85 | 8.03 | 10.24 | |
| Distance (cm) | 100 | 125 | 150 | 175 | 200 | |
|---|---|---|---|---|---|---|
| 1 | Surface area (cm2) | 104.23 | 103.63 | 128.08 | 108.16 | 121.58 |
| Average area (cm2) | 113.14 | |||||
| 2 | Surface area (cm2) | 217.86 | 230.51 | 221.79 | 226.87 | 223.03 |
| Average area (cm2) | 224.01 | |||||
| 3 | Surface area (cm2) | 322.92 | 333.70 | 348.85 | 309.73 | 317.54 |
| Average area (cm2) | 326.55 | |||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, F.; Wang, N.; Fang, H.; Liu, H.; Pang, G. Research on 3D Defect Information Management of Drainage Pipeline Based on BIM. Buildings 2022, 12, 228. https://doi.org/10.3390/buildings12020228
Huang F, Wang N, Fang H, Liu H, Pang G. Research on 3D Defect Information Management of Drainage Pipeline Based on BIM. Buildings. 2022; 12(2):228. https://doi.org/10.3390/buildings12020228
Chicago/Turabian StyleHuang, Fan, Niannian Wang, Hongyuan Fang, Hai Liu, and Gaozhao Pang. 2022. "Research on 3D Defect Information Management of Drainage Pipeline Based on BIM" Buildings 12, no. 2: 228. https://doi.org/10.3390/buildings12020228
APA StyleHuang, F., Wang, N., Fang, H., Liu, H., & Pang, G. (2022). Research on 3D Defect Information Management of Drainage Pipeline Based on BIM. Buildings, 12(2), 228. https://doi.org/10.3390/buildings12020228