
Seismic Performance Analysis of Tuned Mass Rocking Wall (TMRW)-Frame Building Structures


Abstract
1. Introduction
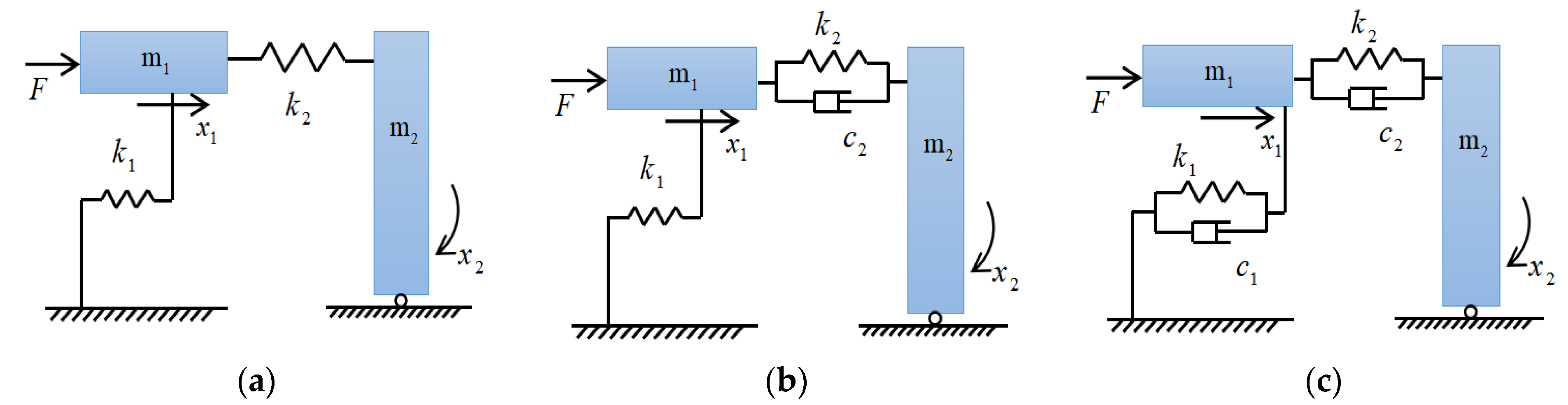
2. Propose of SDOF Structure-Rigid Rocking Wall Model
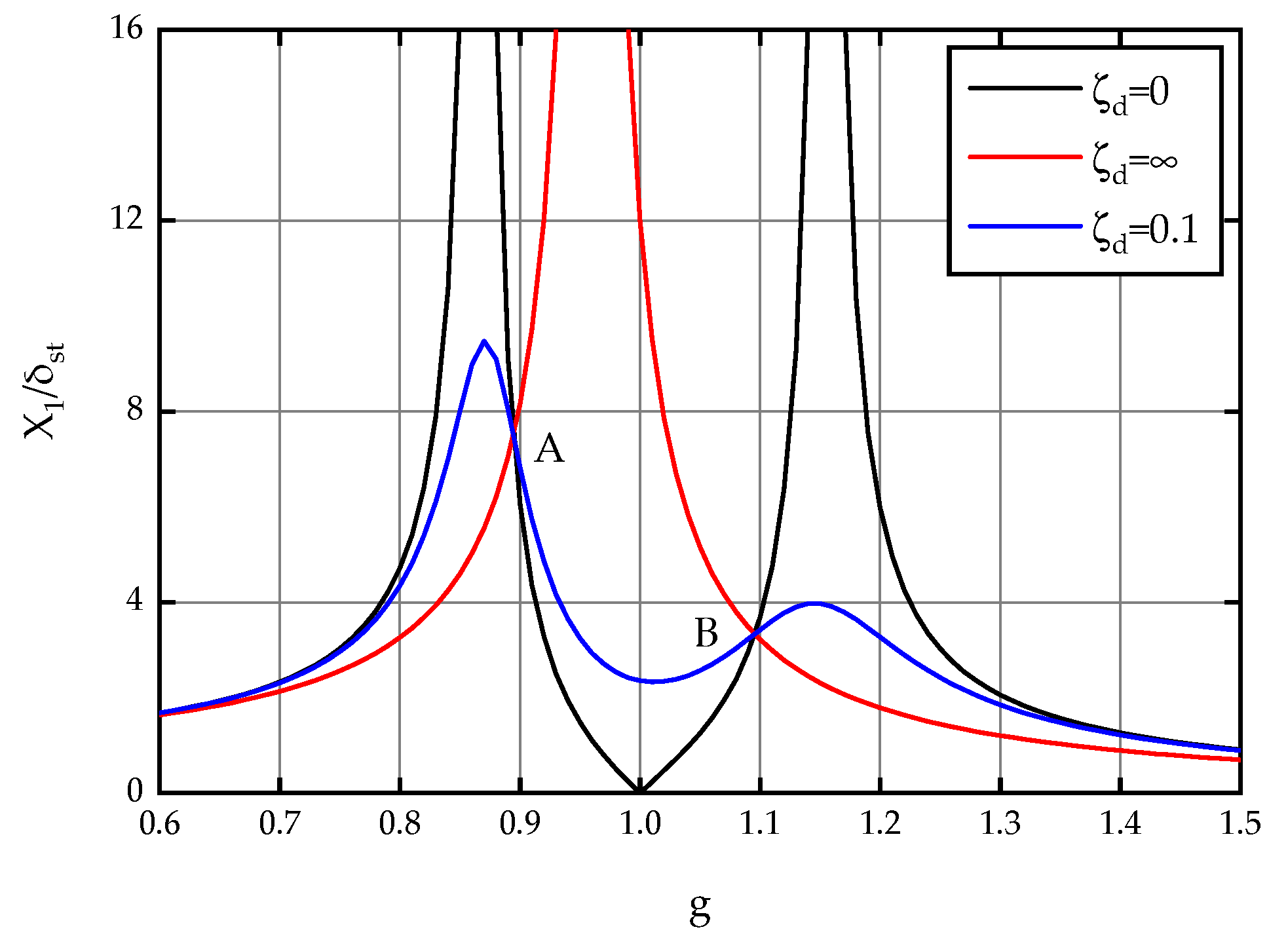
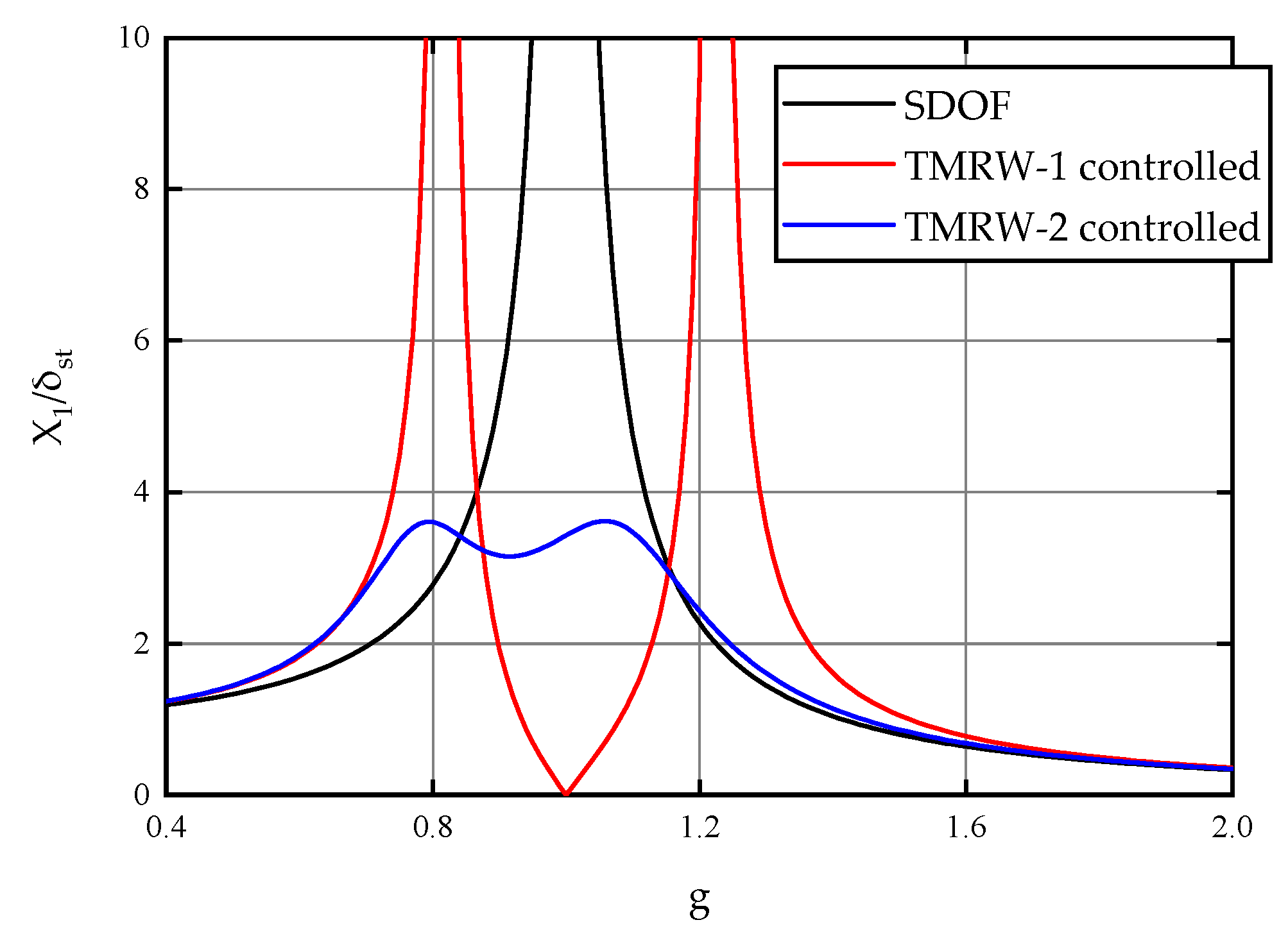
2.1. Vibration Analysis of TMRW-1
2.2. Vibration Analysis of TMRW-2
2.3. Vibration Analysis of TMRW-3
2.4. Control Result of TMRW
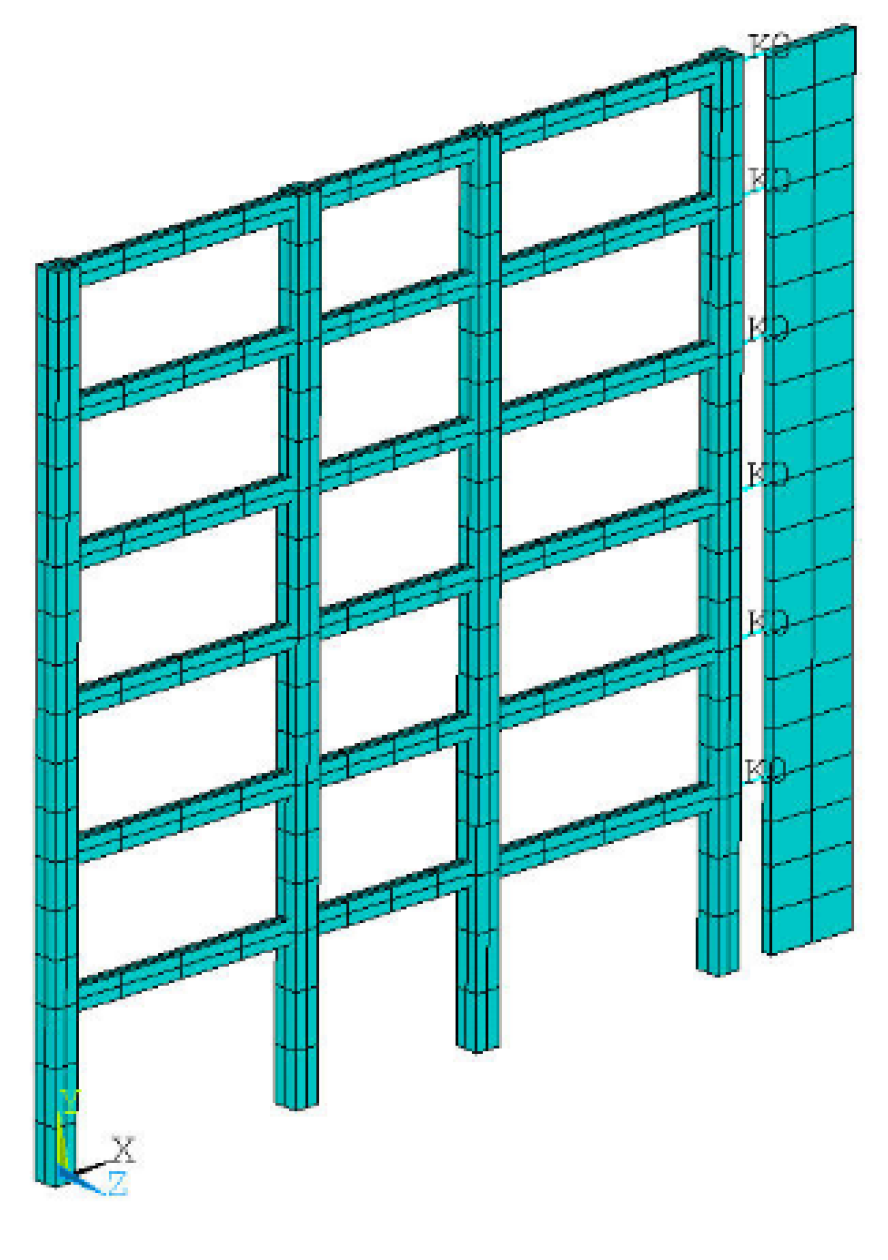
3. Structure Models
4. Seismic Behavior Analysis of TMRW
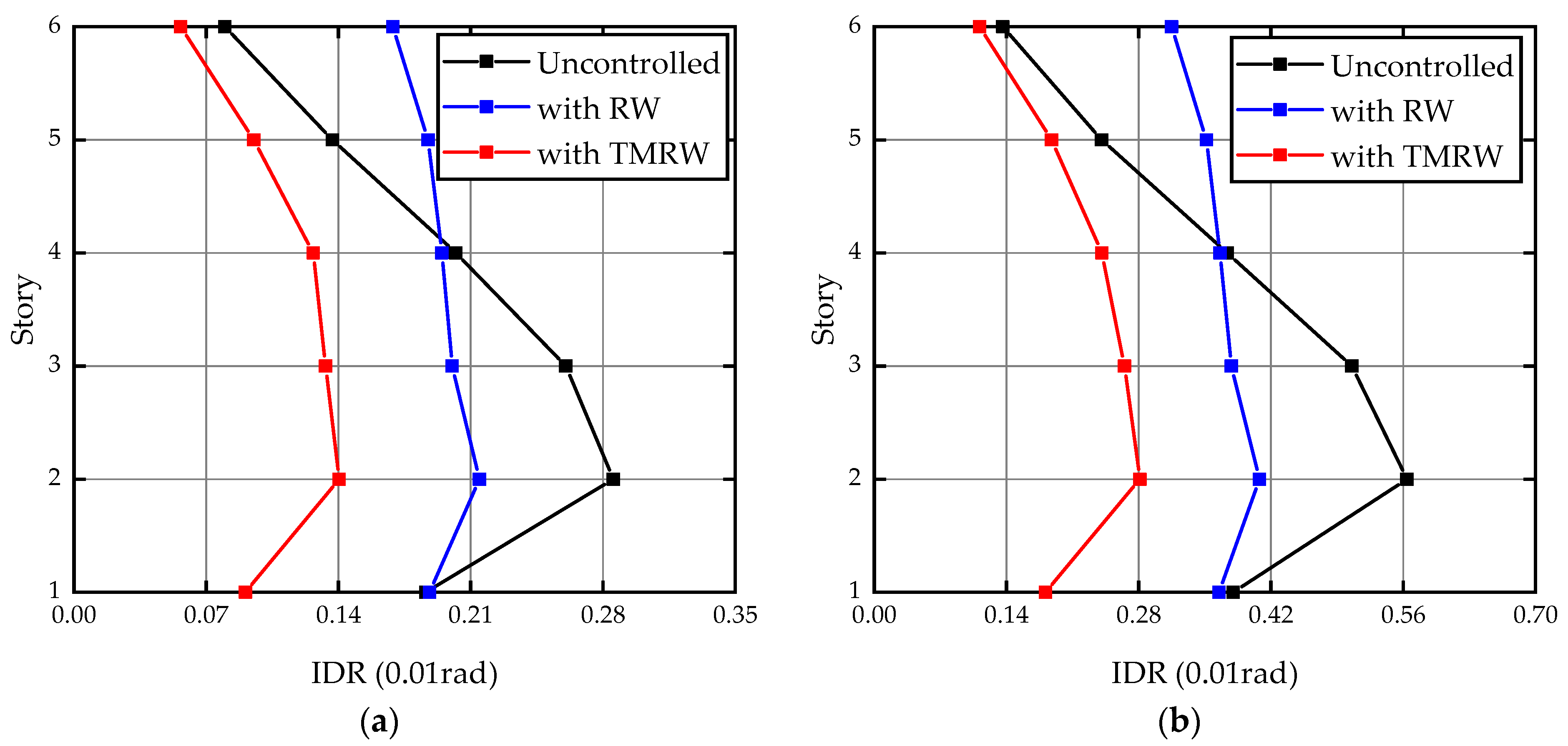
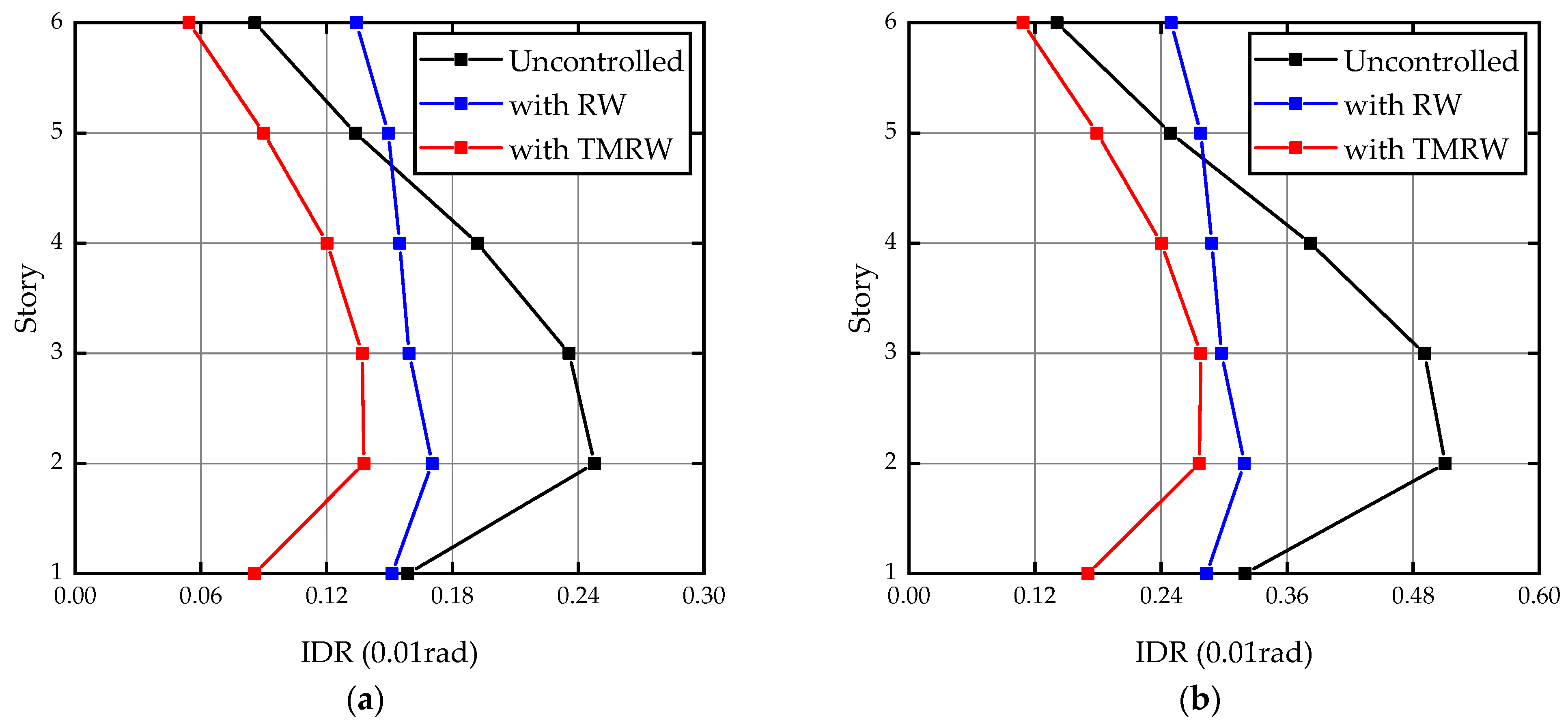
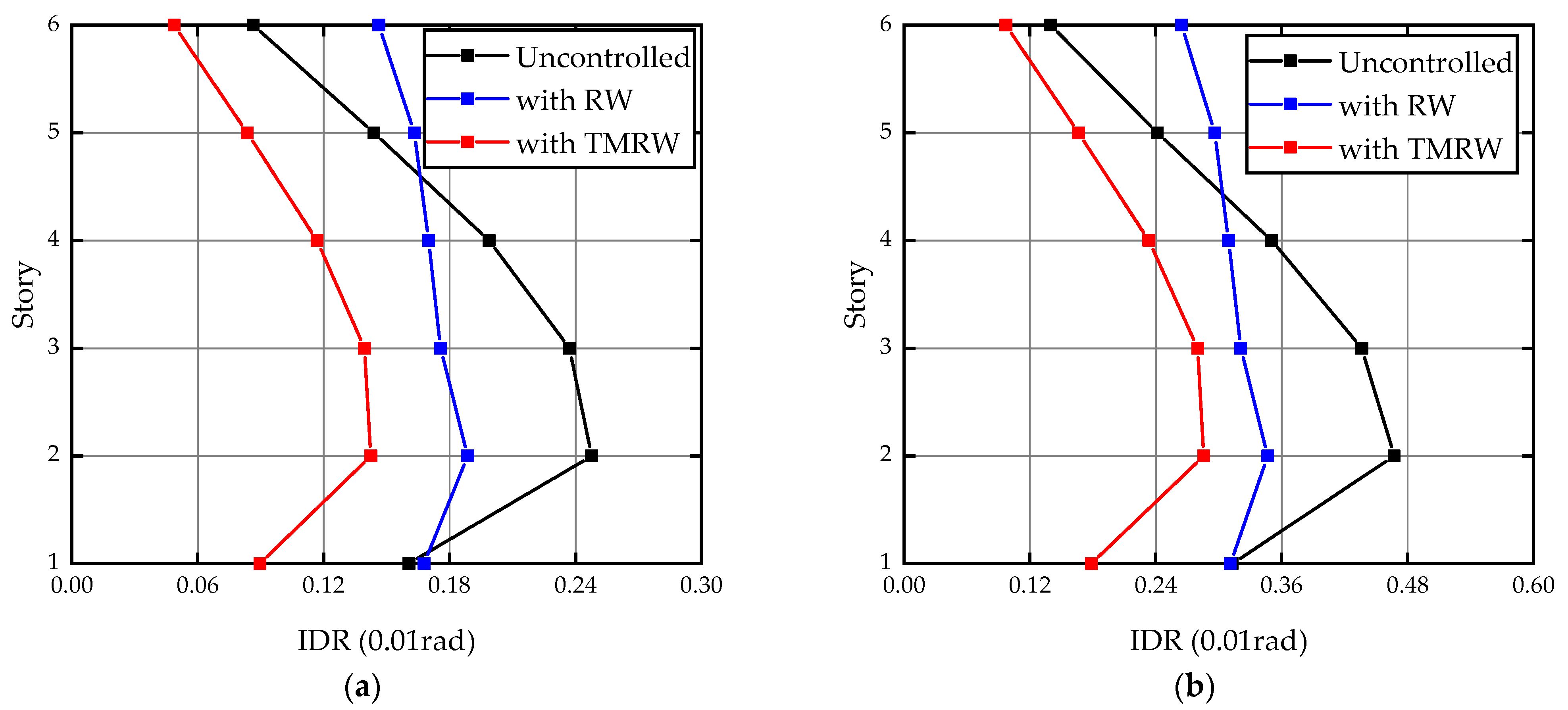
4.1. Deformation Mode
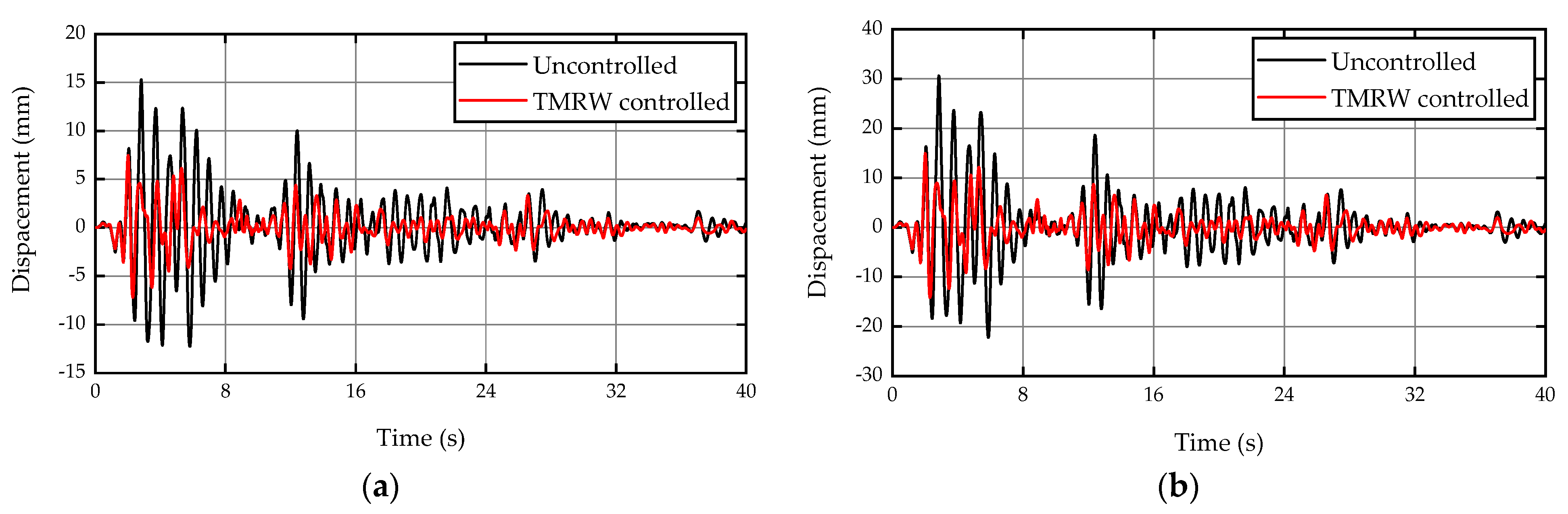
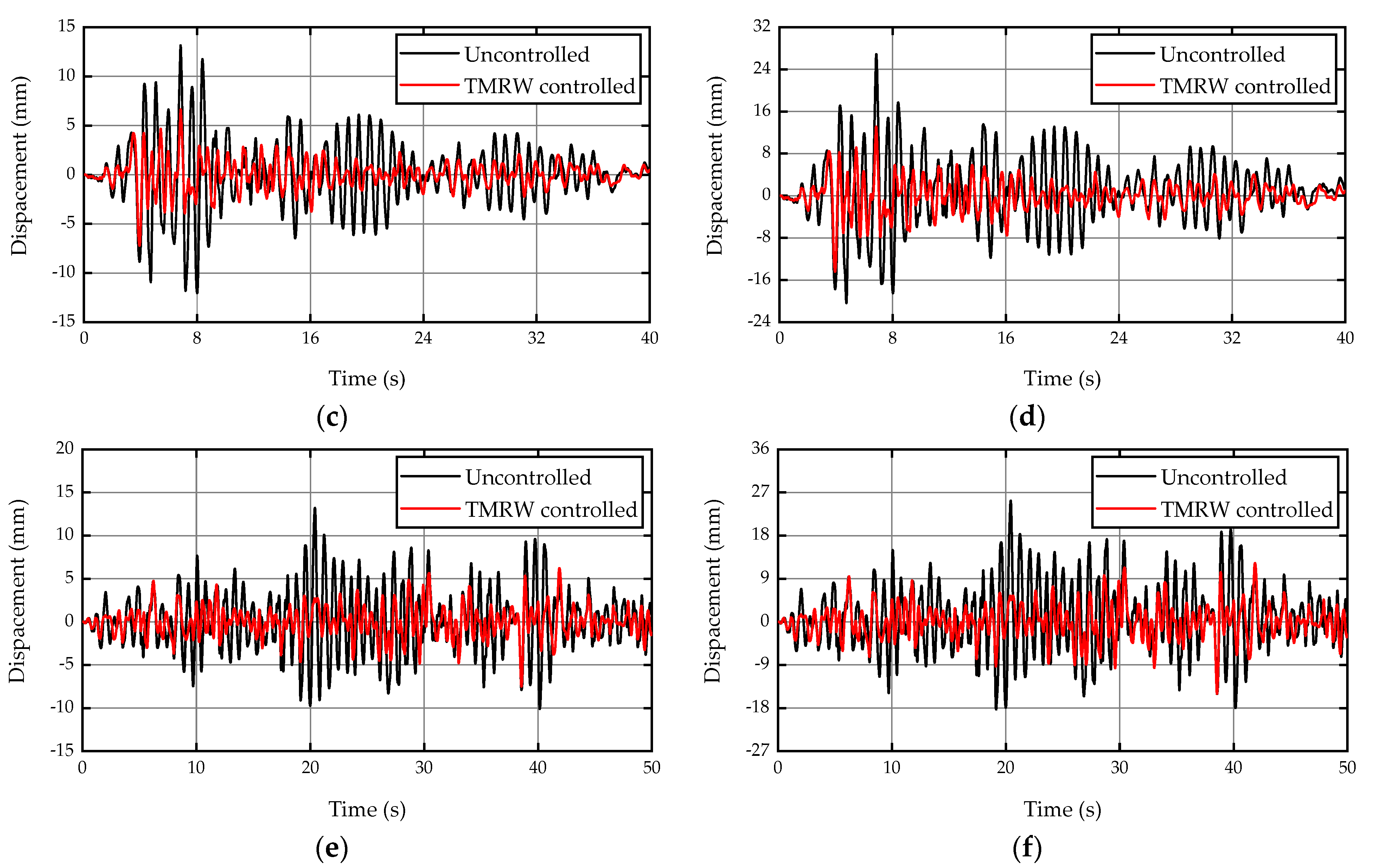
4.2. Displacement and Acceleration Responses
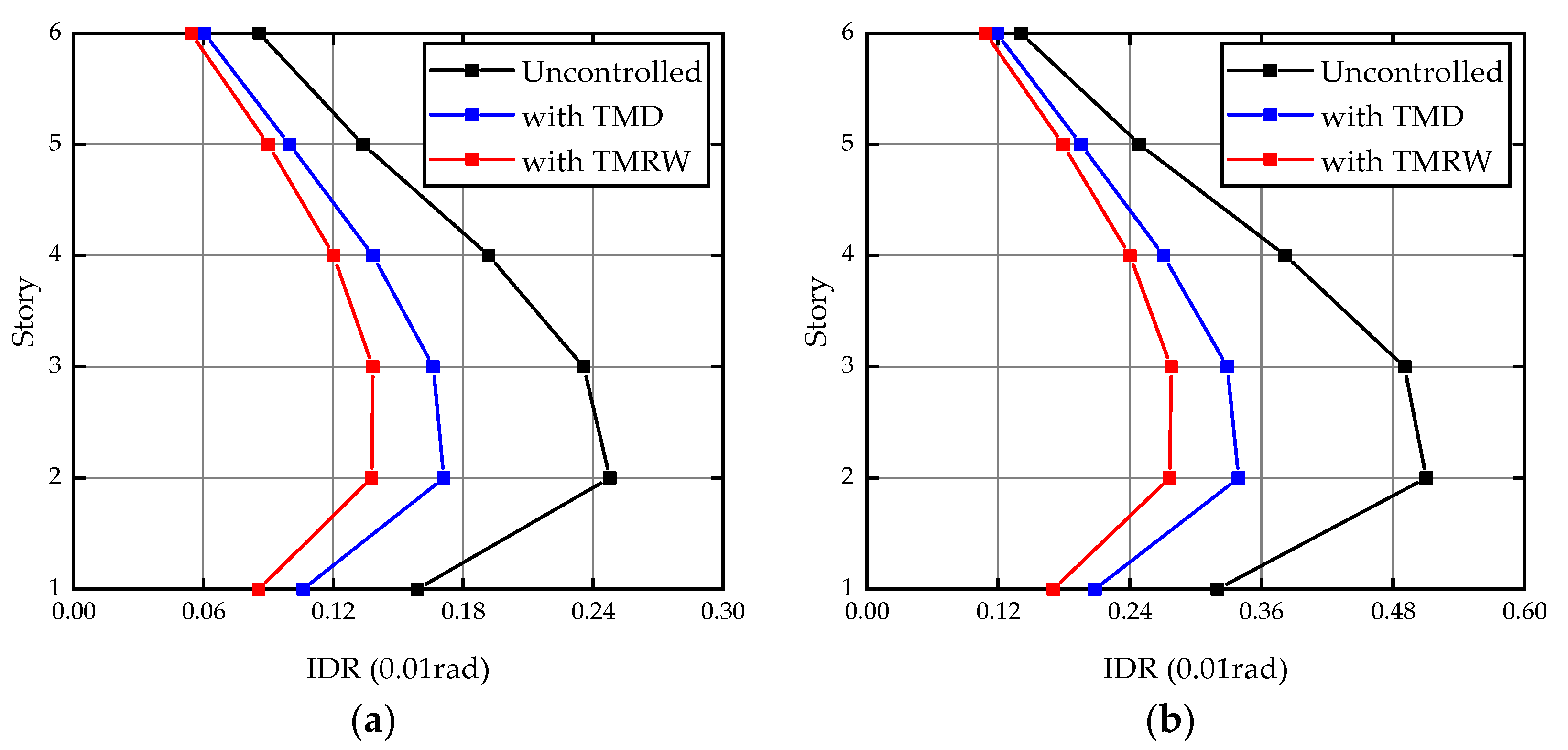
4.3. Comparisons of the Control Results of the TMD and TMRW Controlled Systems
5. Conclusions
- Through the appropriate design of the frequency ratio, the traditional rocking wall can absorb the vibration energy of the host structure while coordinating the deformation of the frame structure, thus improving the seismic performance of the structure.
- By establishing the basic equations of motion for the mechanical model of SDOF structure-rigid rocking wall, the formulas for calculating the frequency ratio and damping ratio of TMRW are developed. The theoretical results show that the steady-state amplitude of the SDOF structure can be made zero by tuning the rocking wall. If the optimal design formulas, which consider damping, is adopted, the performance deterioration caused by the change of excitation frequency can be improved;
- TMRW can improve the uneven interstory drift ratio of the frame structure, but its deformation coordination ability is lower than that of traditional RW. Under earthquake excitation, a frame structure equipped with a TMRW can effectively reduce both the displacement response of the weak layer and the acceleration response of the top floor. The control effectiveness of the peak and the RMS displacement are 51.1% and 57.3%, respectively; the peak and the RMS acceleration are reduced by 21.6% and 33.8%, respectively;
- When subjected to Taft earthquake, the RW designed by using the traditional TMD parameter optimization formulas exhibited poor seismic behavior compared with TMRW. The weaker performance may be attributed to the detuning of TMRW parameters.
- In the proposed TMRW system, the mass ratio and the connecting stiffness are two key parameters that influence the control performance. Furthermore, since a larger mass ratio leads to higher costs when implementing the system, it is necessary to further study the energy dissipation capacity of the TMRW under different mass ratios, especially with lower mass ratios. Additionally, the control performance of TMRW and the failure modes under mass earthquake excitation should also be examined in structures with different height-width ratios.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Cao, H.; Pan, P.; Ye, L.; Qu, Z.; Liu, M. Seismic Performance Analysis of RC Frame Rocking-wall Structure System. J. Archit. Civ. Eng. 2011, 28, 64–69. (In Chinese) [Google Scholar]
- Shehu, R.; Angjeliu, G.; Bilgin, H. A Simple Approach for the Design of Ductile Earthquake-Resisting Frame Structures Counting for P-Delta Effect. Buildings 2019, 9, 216. [Google Scholar] [CrossRef]
- Qu, Z.; Akira, W.; Ye, L. Seismic retrofit of frame structures using rocking wall system. J. Build. Struct 2011, 32, 11–19. (In Chinese) [Google Scholar]
- Ajrab, J.J.; Pekcan, G.; Mander, J.B. Rocking wall-frame structures with supplemental tendon systems. J. Struct. Eng. 2004, 130, 895–903. [Google Scholar] [CrossRef]
- Qu, Z.; Ye, L. Seismic damage mechanism control of rocking wall-frame system. Earthq. Eng. Eng. Vib. 2011, 31, 40–50. (In Chinese) [Google Scholar]
- Guo, T.; Chen, C.; Xu, W.; Sanchez, F. A frequency response analysis approach for quantitative assessment of actuator tracking for real-time hybrid simulation. Smart Mater. Struct. 2014, 23, 045042. [Google Scholar] [CrossRef]
- Makris, N.; Aghagholizadeh, M. The dynamics of an elastic structure coupled with a rocking wall. Earthq. Eng. Struct. Dyn. 2017, 46, 945–962. [Google Scholar] [CrossRef]
- Qu, Z. Study on Seismic Damage Mechanism Control and Design of Rocking Wall-Frame Structures. Doctor Thesis, Tsinghua University, Beijing, China, 2010. (In Chinese). [Google Scholar]
- Qu, Z.; Wada, A.; Motoyui, S.; Sakata, H.; Kishiki, S. Pin-supported walls for enhancing the seismic performance of building structures. Earthq. Eng. Struct. Dyn. 2012, 41, 2075–2091. [Google Scholar] [CrossRef]
- Feng, Y.; Wu, J.; Meng, S.; Wang, Q.; Fu, K. Aseismic performance analysis of rocking wall frame structures with buckling-restrained braces in base. Vib. Shock 2016, 35, 35–40. (In Chinese) [Google Scholar]
- Chen, X.; Takeuchi, T.; Matsui, R. Simplified design procedure for controlled spine frames with energy-dissipating members. J. Constr. Steel Res. 2017, 135, 242–252. [Google Scholar] [CrossRef]
- Takeuchi, T.; Chen, X.; Matsui, R. Seismic performance of controlled spine frames with energy-dissipating members. J. Constr. Steel Res. 2015, 114, 51–65. [Google Scholar] [CrossRef]
- Zhang, W.; Li, G. Seismic fragility study on rocking wall-frame system with dampers. Eearthq. Eng. Eng. Vibrat. 2020, 40, 71–80. (In Chinese) [Google Scholar]
- Collini, L.; Garziera, R.; Riabova, K.; Munitsyna, M.; Tasora, A. Oscillations control of rocking-block-type buildings by the Addition of a tuned pendulum. Shock Vib. 2016, 2016, 8570538. [Google Scholar] [CrossRef][Green Version]
- Di Egidio, A.; Pagliaro, S.; Fabrizio, C.; de Leo, A.M. Seismic performance of frame structures coupled with an external rocking wall. Eng. Struct. 2020, 224, 111207. [Google Scholar] [CrossRef]
- Pian, C.; Liu, Z.; Tao, Y.; Lu, G. Revised plasticity damaged constitutive model of reinforced concrete equivalent material and its application in seismic analysis. Build. Struct. 2015, 45, 19–24. (In Chinese) [Google Scholar]
- Rana, R.; Soong, T.T. Parametric study and simplified design of tuned mass dampers. Eng. Struct. 1998, 20, 193–204. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Excitation | Value | Displacement (mm) | ||
|---|---|---|---|---|
| Uncontrolled | TMRW | |||
| El Centro (0.1 g) | Peak | 15.275 | 7.480 | 51.0% |
| RMS | 3.331 | 1.512 | 54.6% | |
| El Centro (0.2 g) | Peak | 30.601 | 14.971 | 51.1% |
| RMS | 6.022 | 3.013 | 50.0% | |
| Taft (0.1 g) | Peak | 13.150 | 7.214 | 45.1% |
| RMS | 3.304 | 1.412 | 57.3% | |
| Taft (0.2 g) | Peak | 26.840 | 14.430 | 46.2% |
| RMS | 6.239 | 2.839 | 54.5% | |
| Wenchuan (0.1 g) | Peak | 13.212 | 7.498 | 43.2% |
| RMS | 3.631 | 1.775 | 51.1% | |
| Wenchuan (0.2 g) | Peak | 25.285 | 15.006 | 40.7% |
| RMS | 6.989 | 3.545 | 49.3% | |
| Excitation | Value | Acceleration (m/s2) | ||
|---|---|---|---|---|
| Uncontrolled | TMRW | |||
| El Centro (0.1 g) | Peak | 3.12 | 2.997 | 3.9% |
| RMS | 0.583 | 0.386 | 33.8% | |
| El Centro (0.2 g) | Peak | 5.927 | 5.939 | −0.2% |
| RMS | 1.055 | 0.769 | 27.1% | |
| Taft (0.1 g) | Peak | 2.707 | 2.122 | 21.6% |
| RMS | 0.602 | 0.425 | 29.4% | |
| Taft (0.2 g) | Peak | 4.815 | 4.229 | 12.2% |
| RMS | 1.128 | 0.850 | 24.6% | |
| Wenchuan (0.1 g) | Peak | 2.827 | 2.307 | 18.4% |
| RMS | 0.716 | 0.503 | 29.7% | |
| Wenchuan (0.2 g) | Peak | 5.624 | 4.615 | 17.9% |
| RMS | 1.374 | 1.006 | 26.8% | |
| Excitation Responses | Displacement (mm) | Acceleration (m/s2) | |||||||
|---|---|---|---|---|---|---|---|---|---|
| TMD | TMRW | TMD | TMRW | TMD | TMRW | TMD | TMRW | ||
| 0.1 g | Peak | 8.954 | 7.214 | 31.91% | 45.1% | 2.393 | 2.122 | 11.6% | 21.6% |
| RMS | 1.895 | 1.412 | 42.65% | 57.3% | 0.432 | 0.425 | 28.2% | 29.4% | |
| 0.2 g | Peak | 17.679 | 14.430 | 34.13% | 46.2% | 4.458 | 4.229 | 7.4% | 12.2% |
| RMS | 3.781 | 2.839 | 39.4% | 54.5% | 0.855 | 0.850 | 24.2% | 24.6% | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, A.; Chen, S.; Lin, W.; Qi, A. Seismic Performance Analysis of Tuned Mass Rocking Wall (TMRW)-Frame Building Structures. Buildings 2021, 11, 293. https://doi.org/10.3390/buildings11070293
Wang A, Chen S, Lin W, Qi A. Seismic Performance Analysis of Tuned Mass Rocking Wall (TMRW)-Frame Building Structures. Buildings. 2021; 11(7):293. https://doi.org/10.3390/buildings11070293
Chicago/Turabian StyleWang, Andong, Shanghong Chen, Wei Lin, and Ai Qi. 2021. "Seismic Performance Analysis of Tuned Mass Rocking Wall (TMRW)-Frame Building Structures" Buildings 11, no. 7: 293. https://doi.org/10.3390/buildings11070293
APA StyleWang, A., Chen, S., Lin, W., & Qi, A. (2021). Seismic Performance Analysis of Tuned Mass Rocking Wall (TMRW)-Frame Building Structures. Buildings, 11(7), 293. https://doi.org/10.3390/buildings11070293