Experimental Evaluation of Brake Pad Material Propensity to Stick-Slip and Groan Noise Emission

 ,
, 
Abstract
1. Introduction
2. Materials and Methods
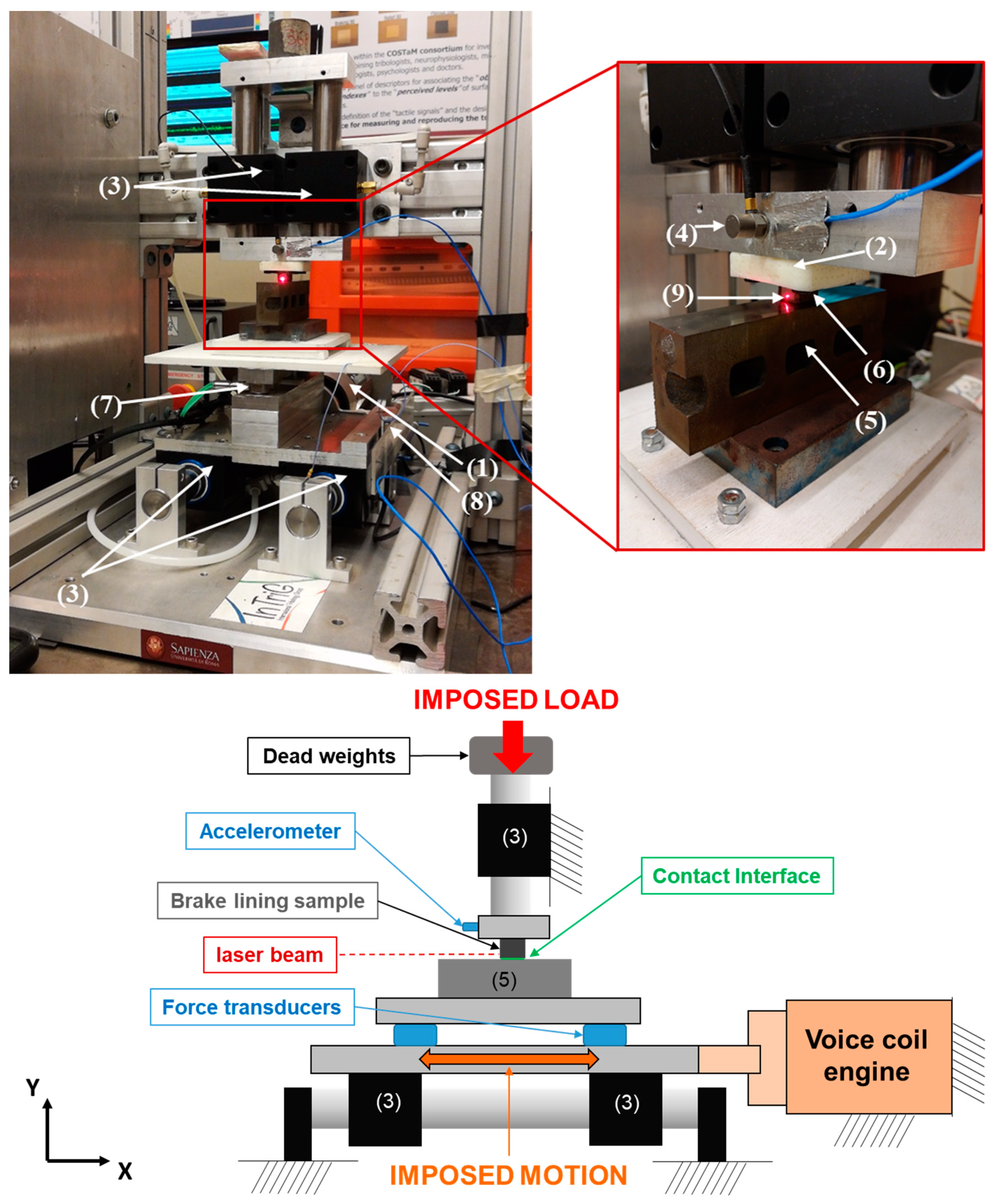
2.1. Experimental Set-Up
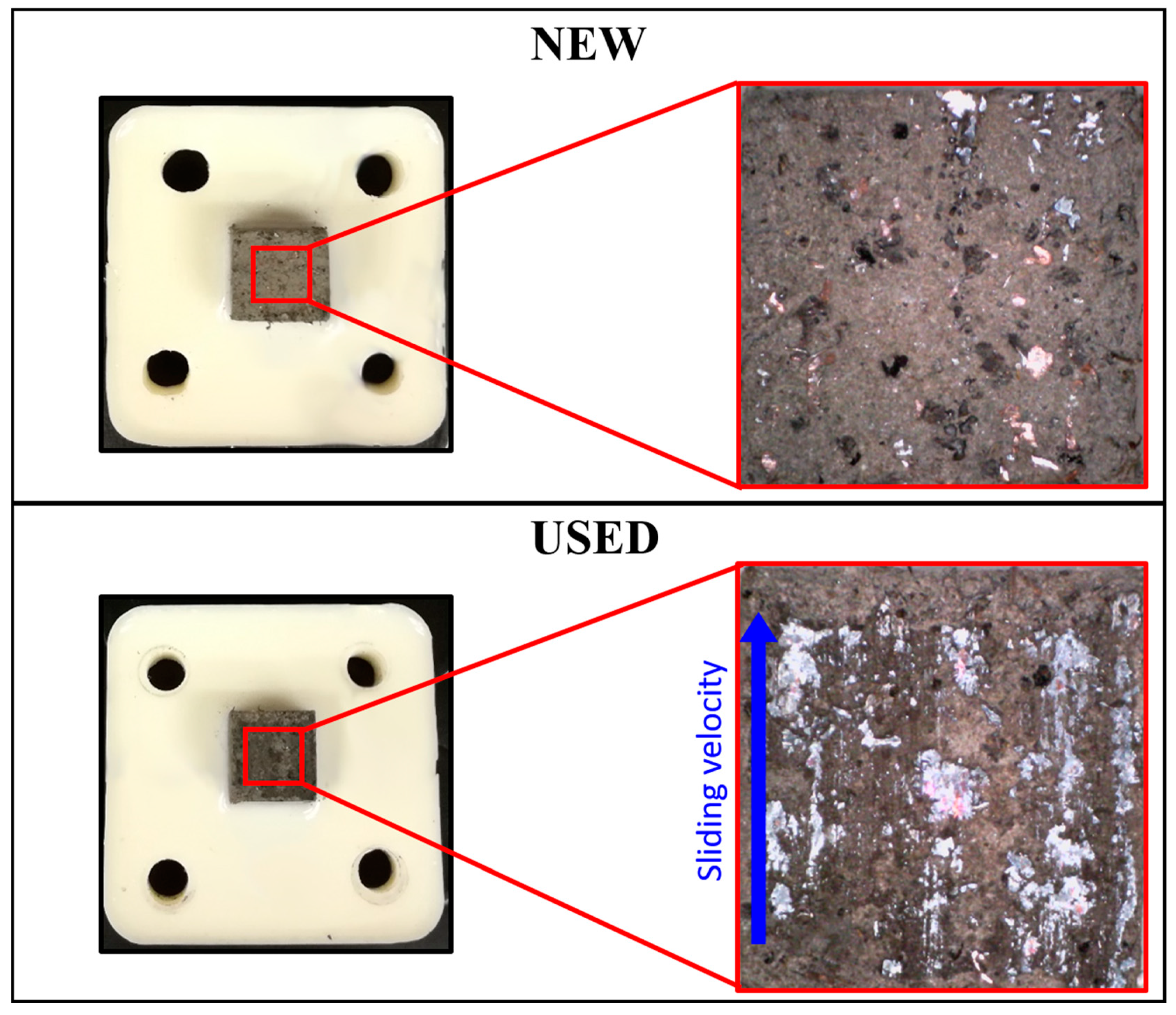
2.2. Friction Material Samples and Test Protocol
3. Frictional and Dynamic Response of the Tested Materials
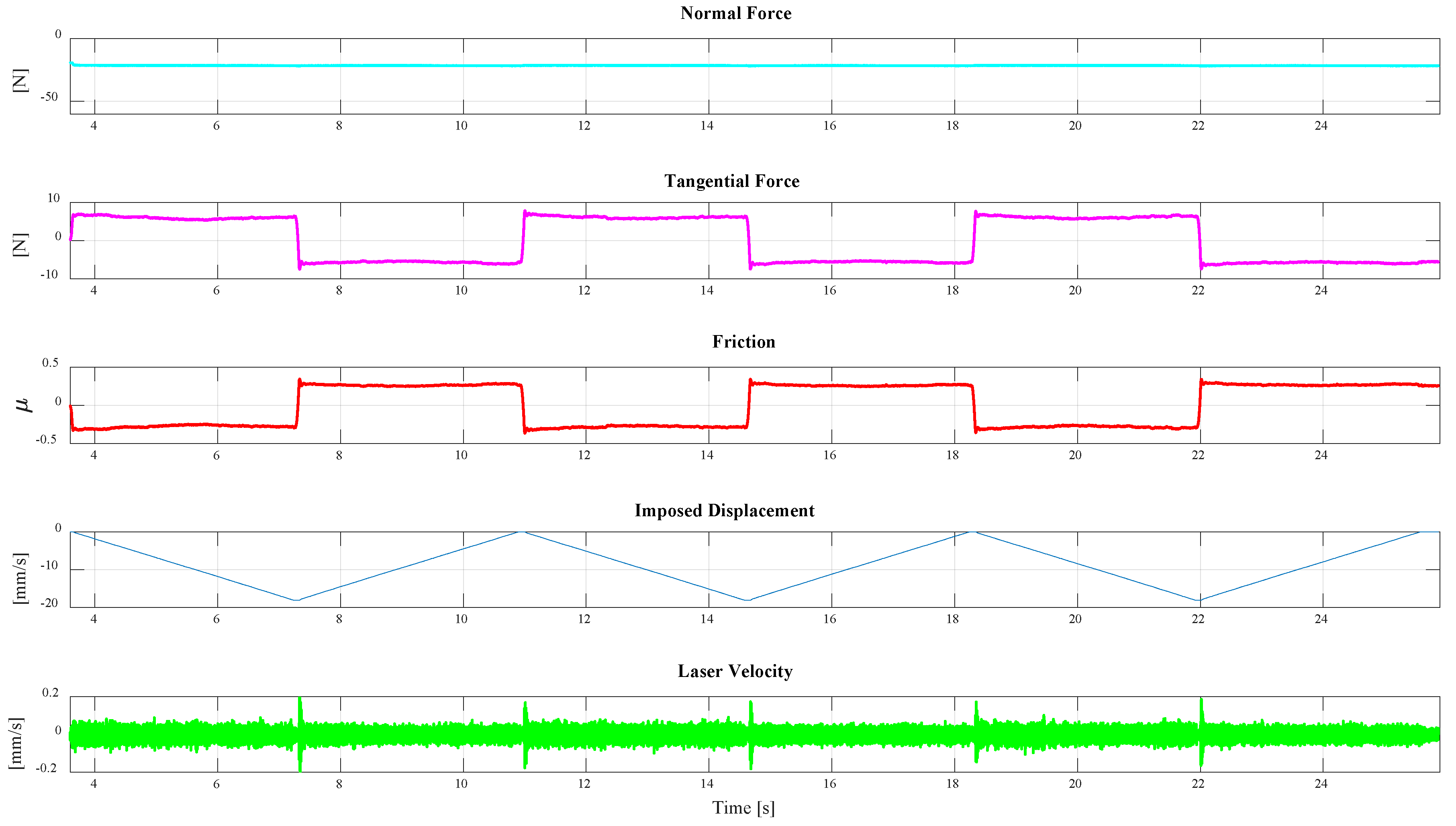
3.1. Frictional Material Response
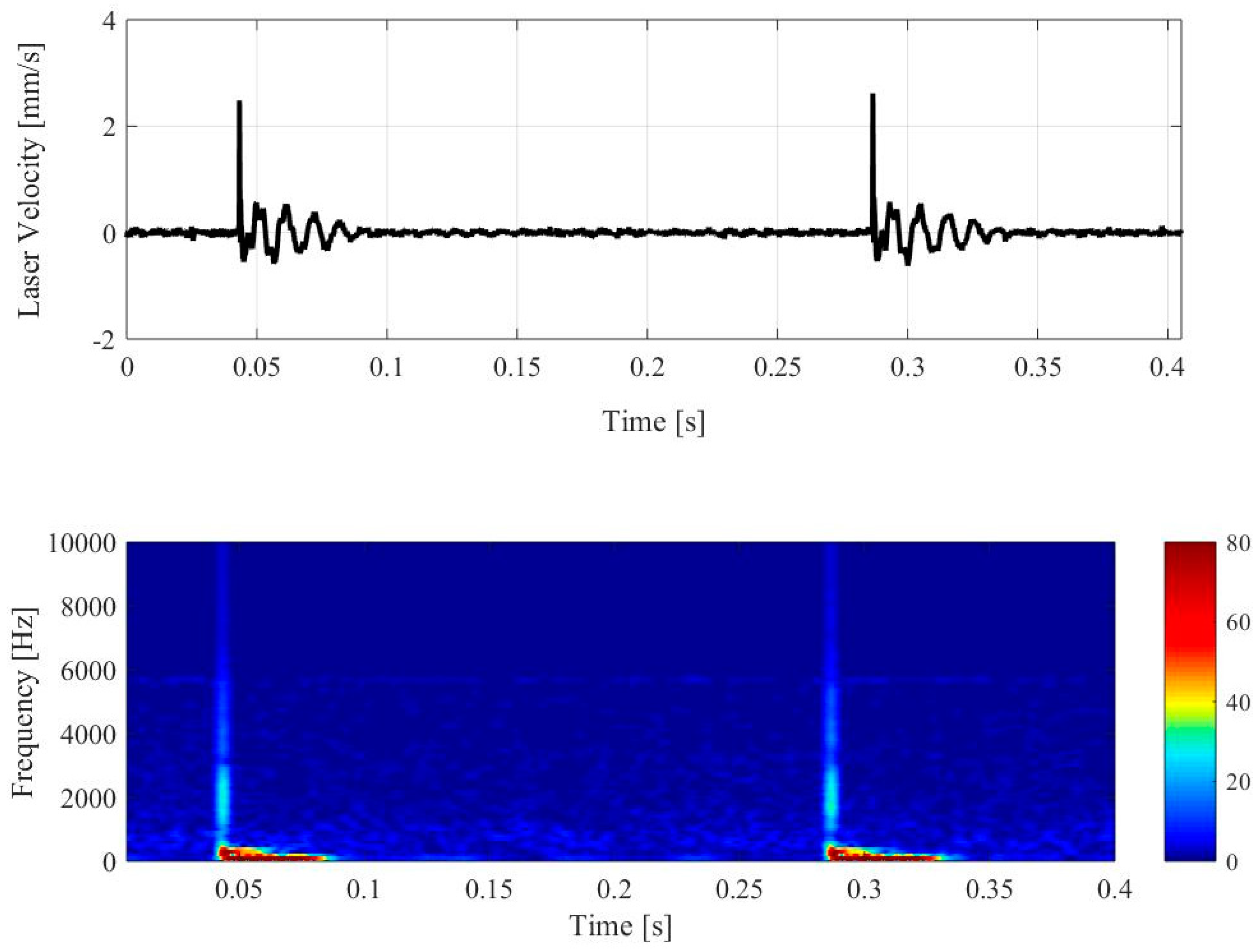
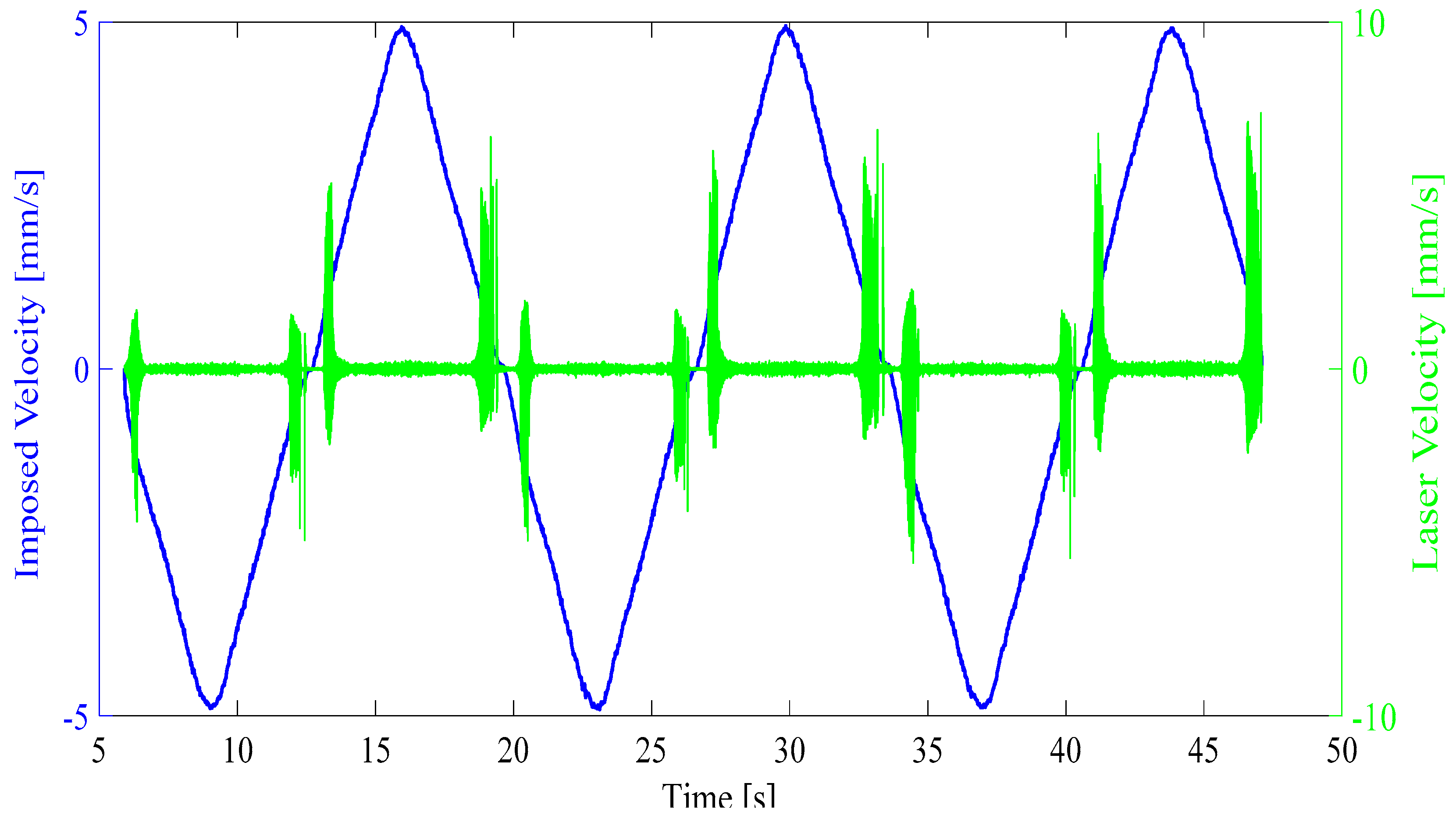
3.2. Stick-Slip Analysis
4. Material Comparison
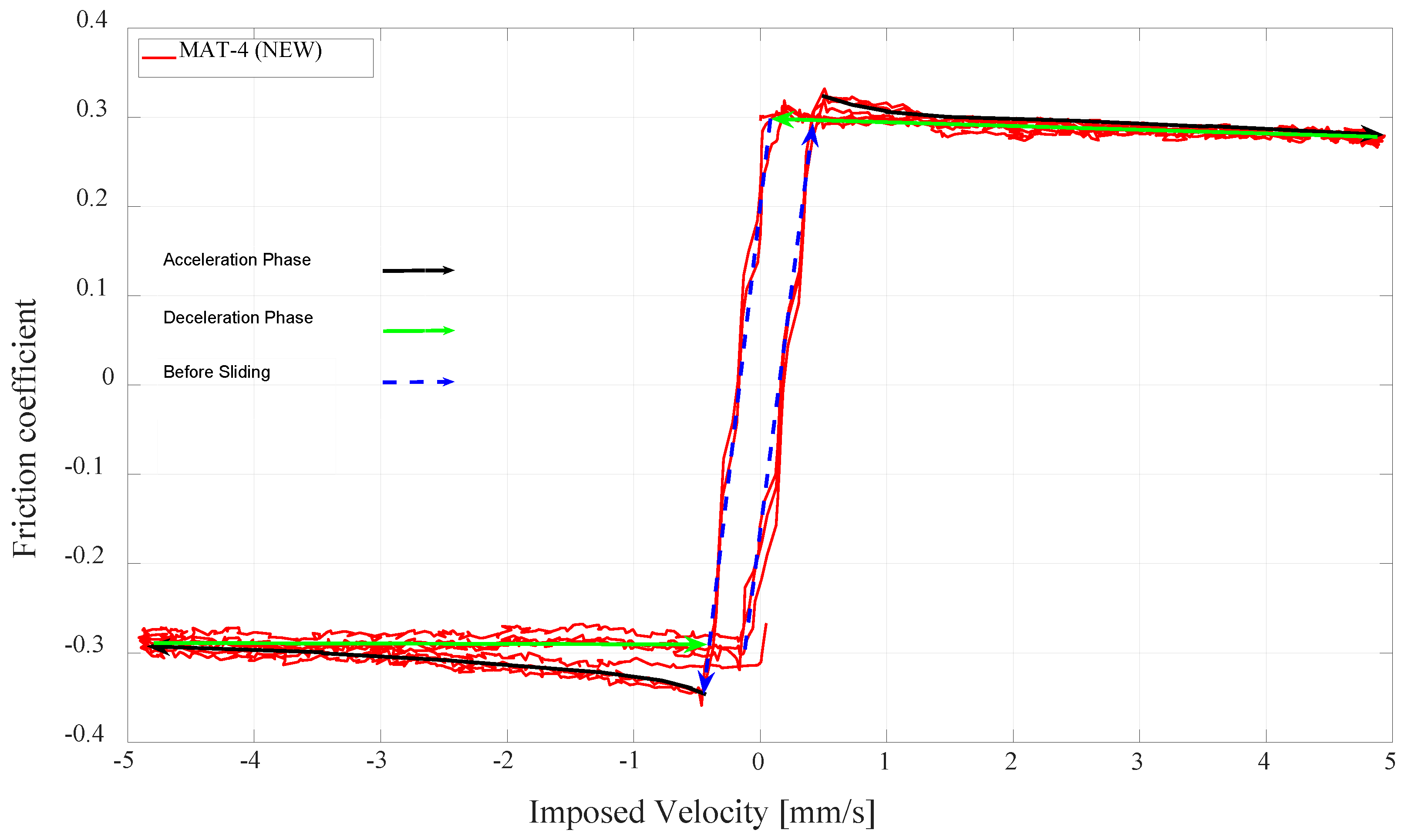
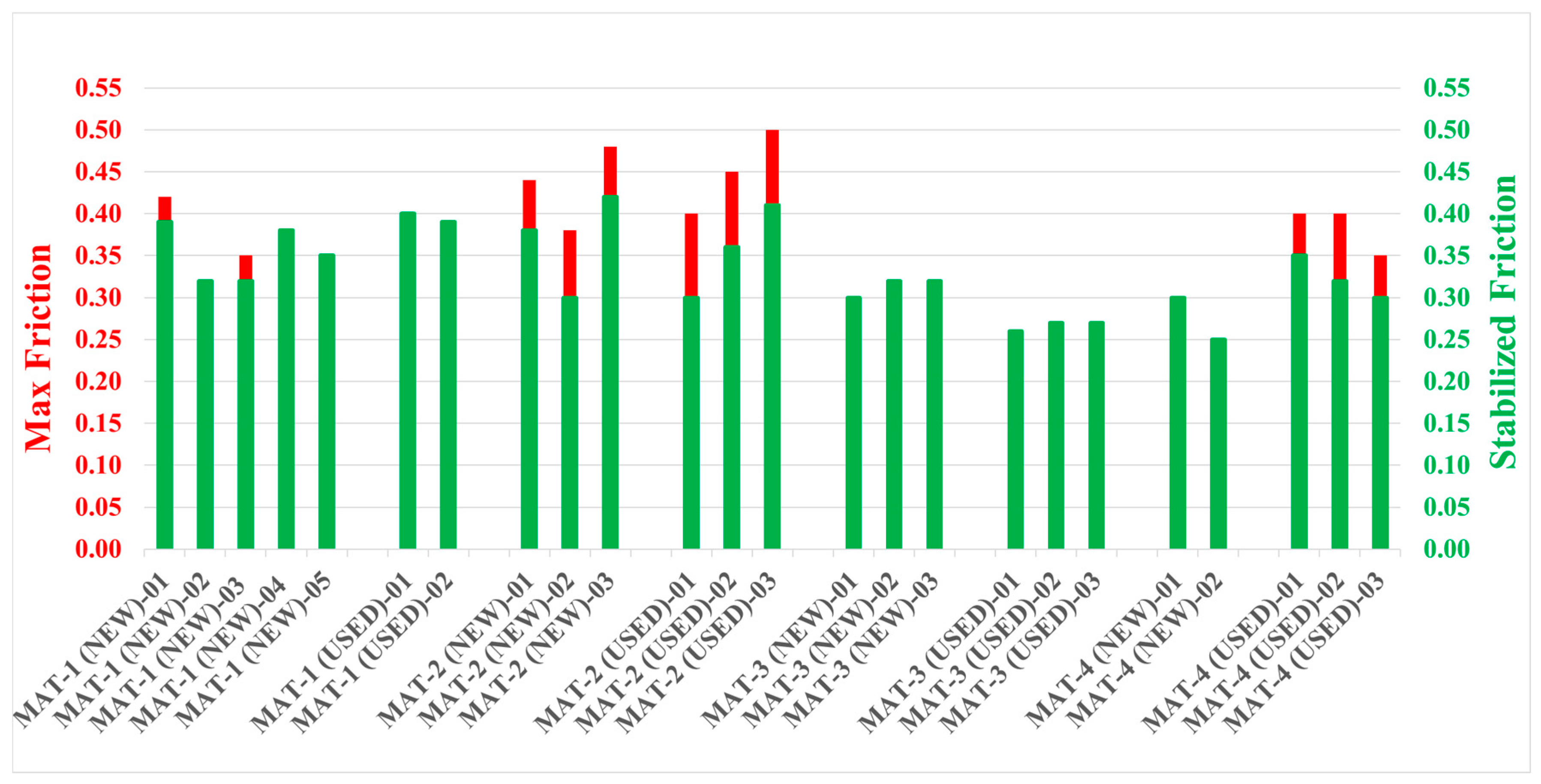
4.1. Material Frictional Response
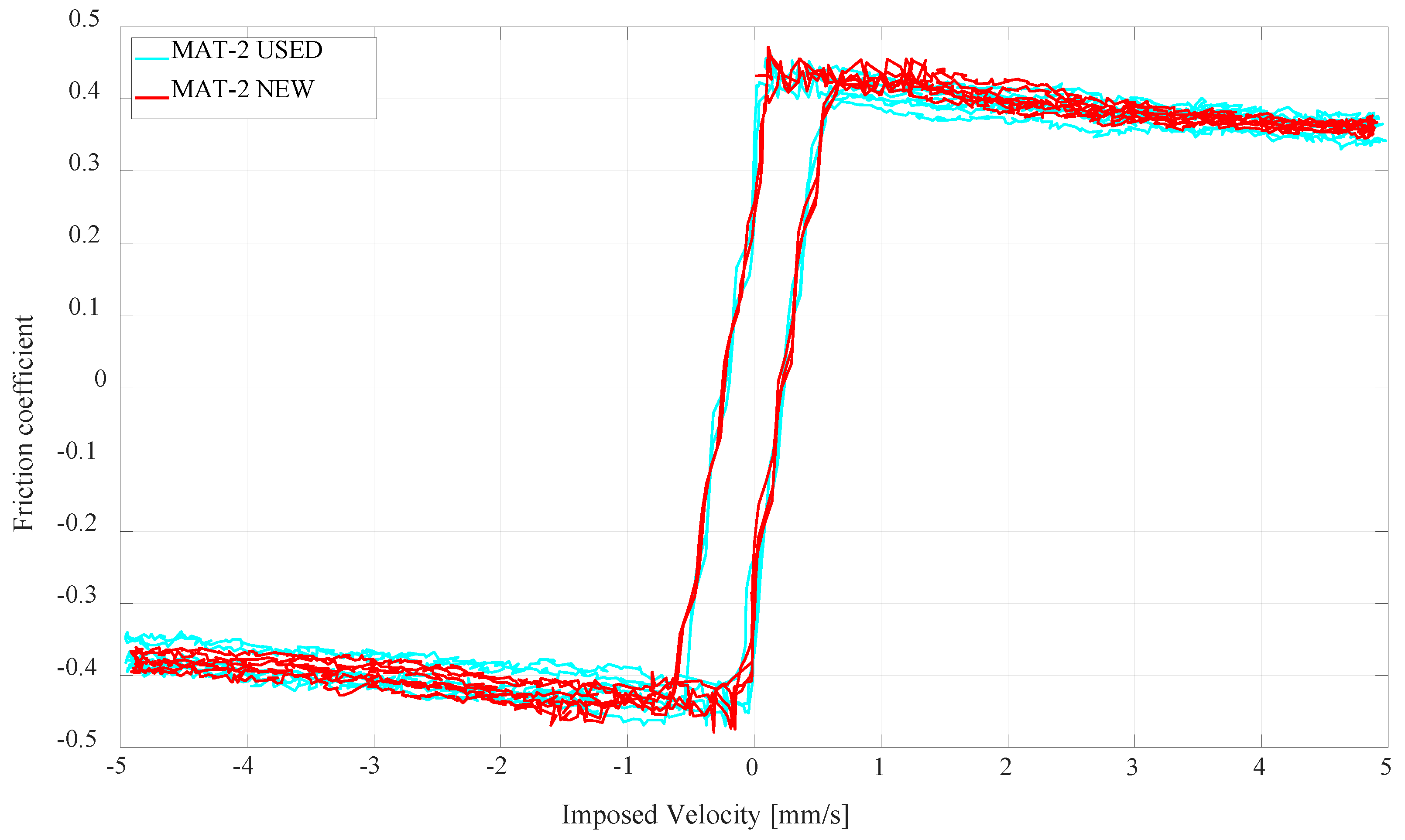
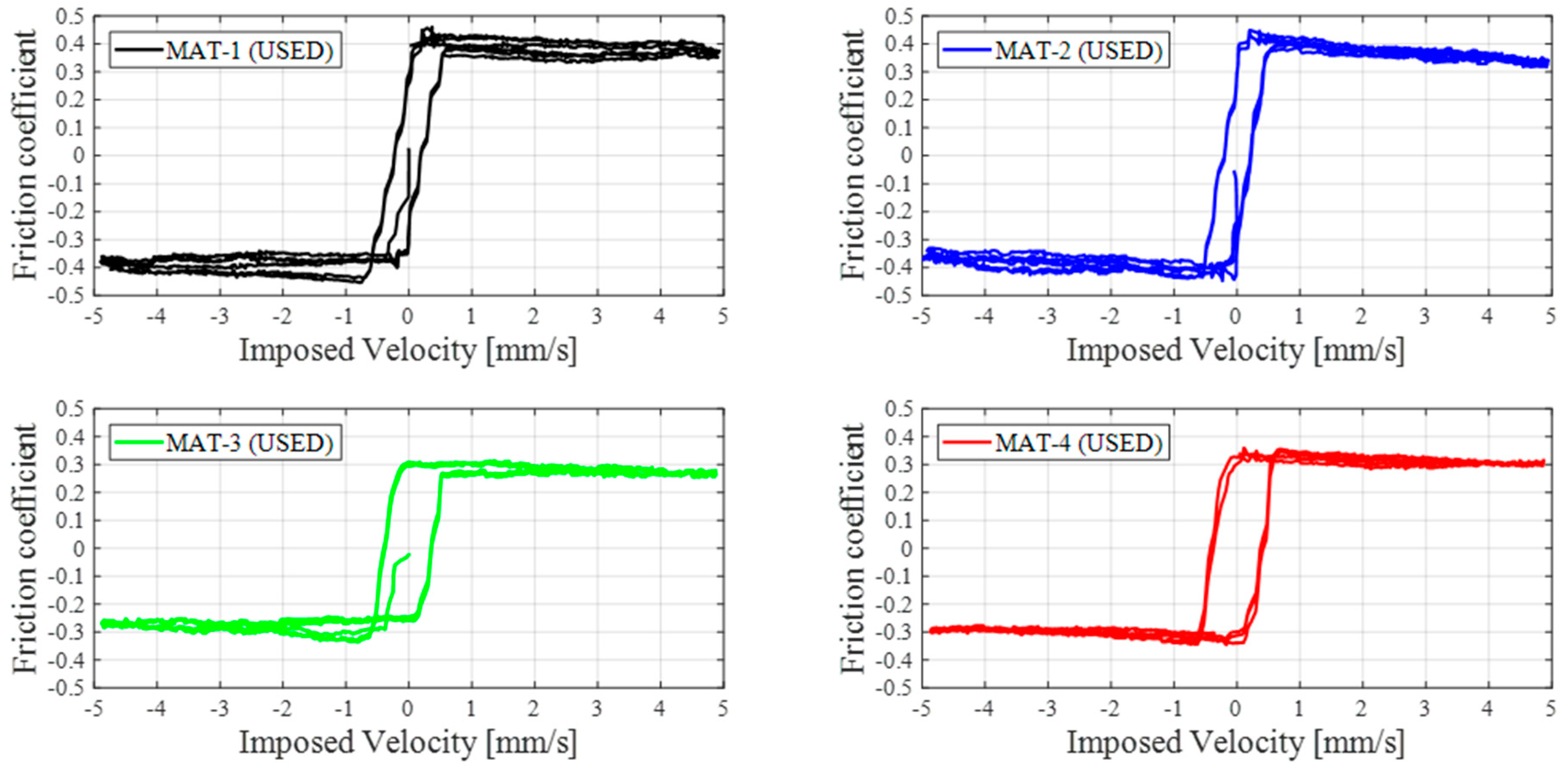
- MAT-2 has evident negative friction-velocity slope in all NEW and USED tested samples;
- MAT-3 does not show negative friction-velocity slope in any NEW or USED tested samples;
- MAT-2 has the highest maximum friction coefficient, on average; on the contrary, MAT-3 has the lowest friction coefficient, on average;
- MAT-1 shows a slight friction-velocity slope for only some of the tested samples; MAT-4 has an intermediate behavior between MAT-1 and MAT-2.
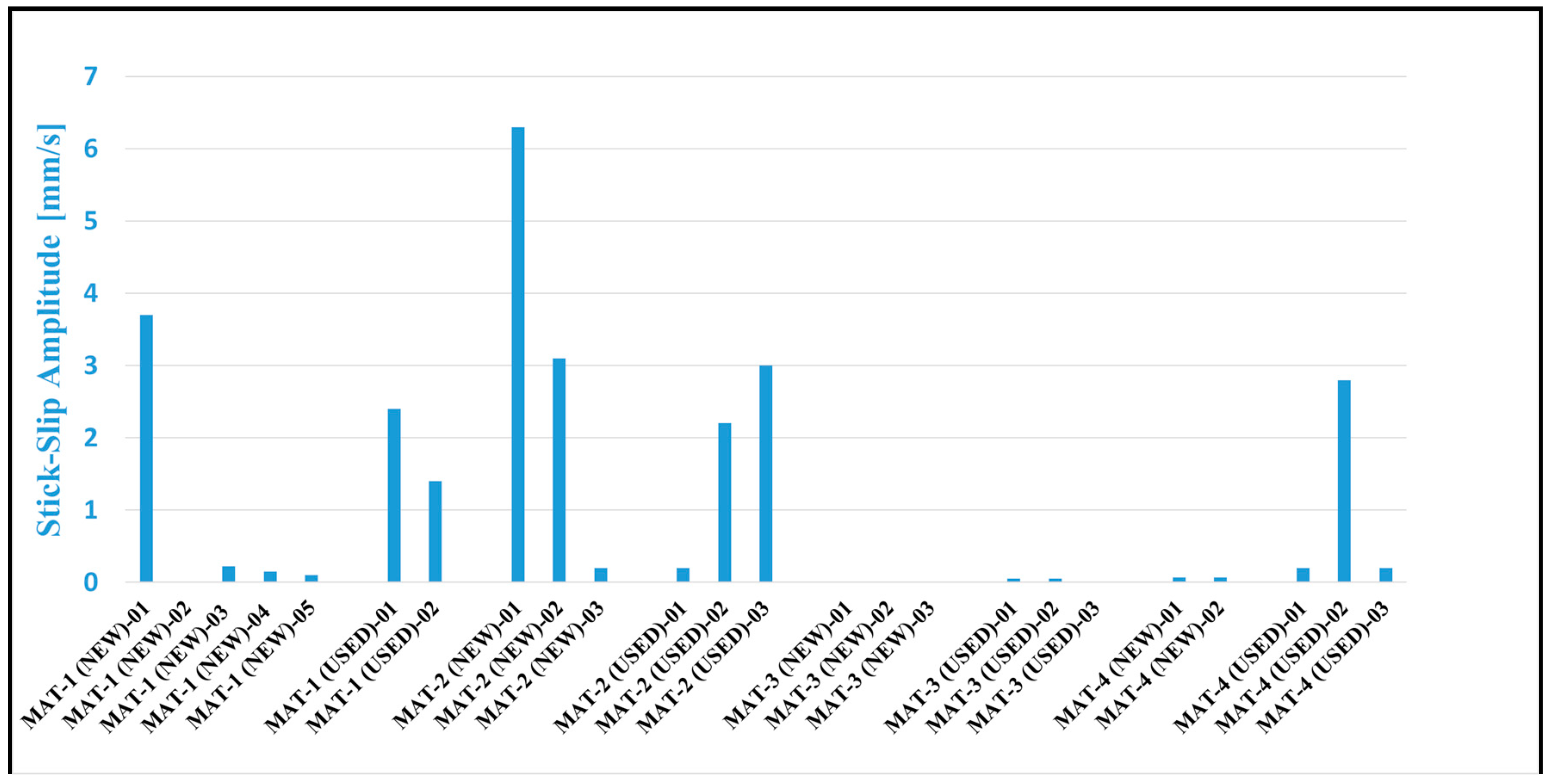
4.2. Material Stick-Slip Propensity
- The highest stick-slip amplitude is detected for MAT-2, whereas for MAT-3 there is almost a total absence of stick-slip. MAT-2 is characterized by the presence of a significant negative friction-velocity slope, for all tested samples. MAT-3 does not show any slope in any of its samples, instead. As a result, a relationship between stick-slip amplitude (and occurrence) and negative friction velocity slope can be identified.
- Even if MAT-1 and MAT-4 show only slight friction-velocity slopes, they present a higher mean friction coefficient with respect to MAT-3. As a consequence, they show an intermediate stick-slip amplitude between MAT-2 and MAT-3.
- When negative friction-velocity slope exists, stick-slip always occurs in all tested samples, and both the amplitude of the stick-slip vibrations and the critical velocity range increase with the increase of the difference between static and dynamic friction coefficient.
- A higher friction coefficient leads to stick-slip, even if no negative friction velocity slope is detected. Anyway, the stick-slip amplitude and critical ranges are lower with respect to the samples for which negative slope is observed.
- Both stick-slip amplitude and critical velocity ranges are in agreement with the frictional response of the material and with the feedback on the groan occurrence on commercial brakes.
5. Effect of Boundary Conditions
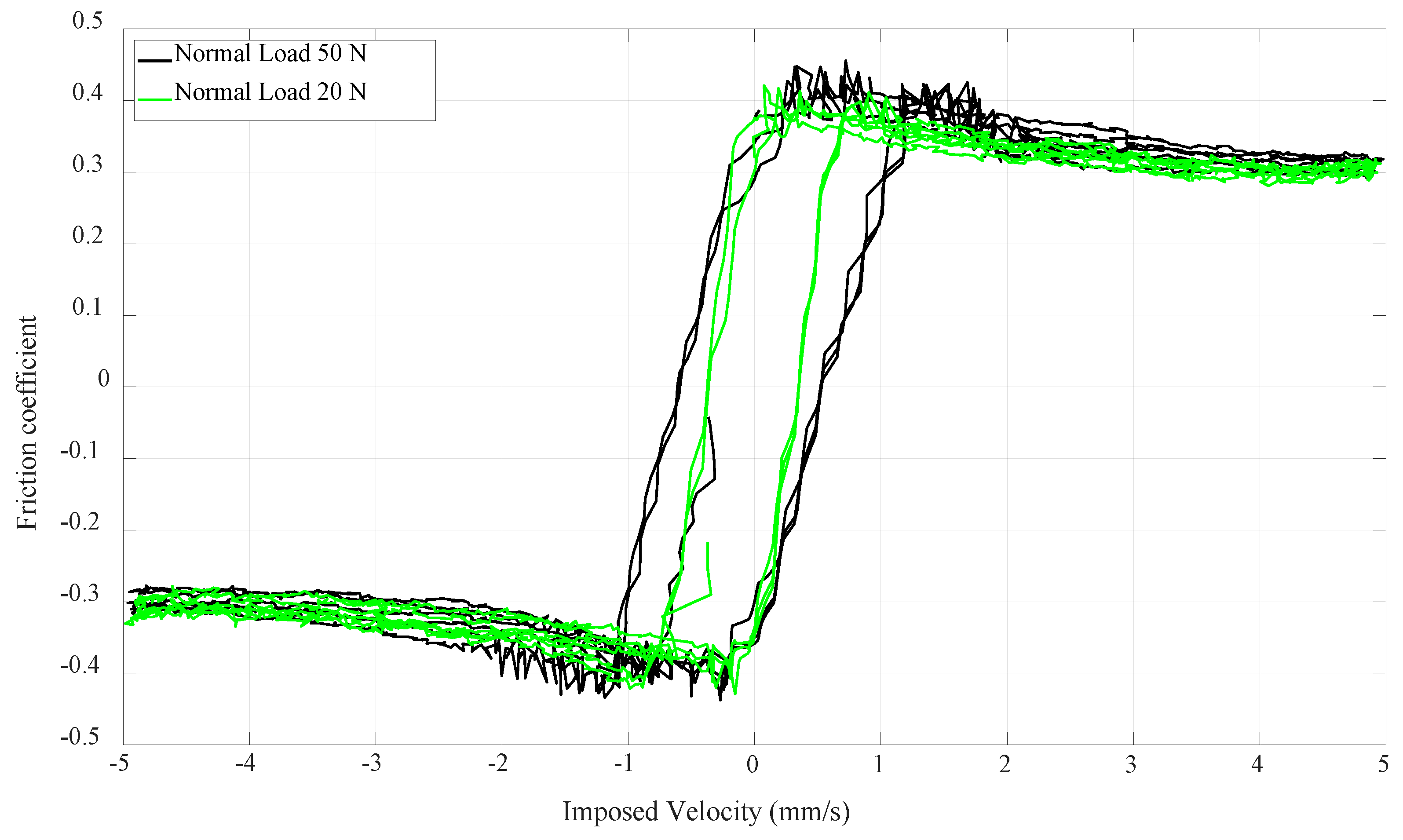
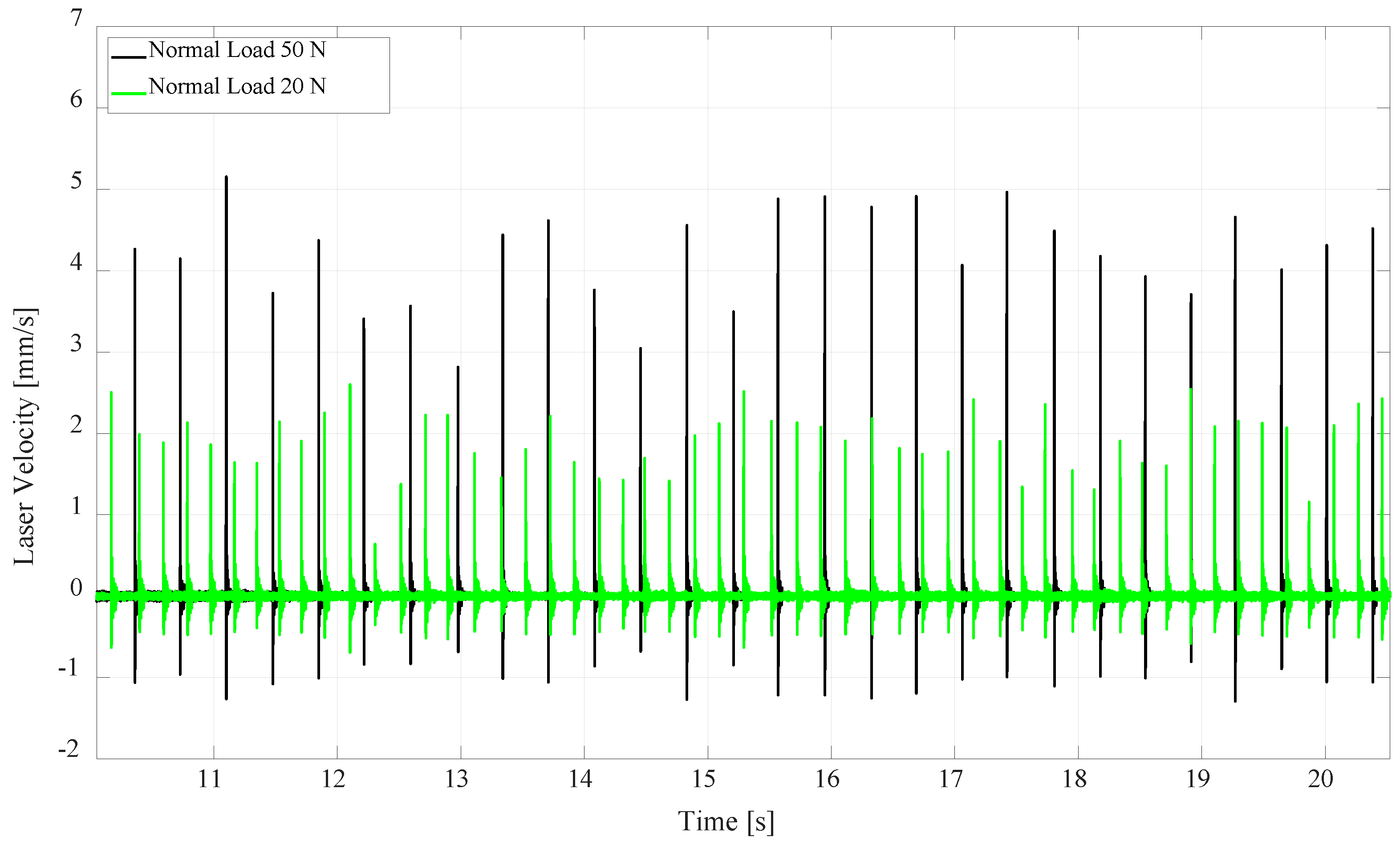
5.1. Material Response VS Load
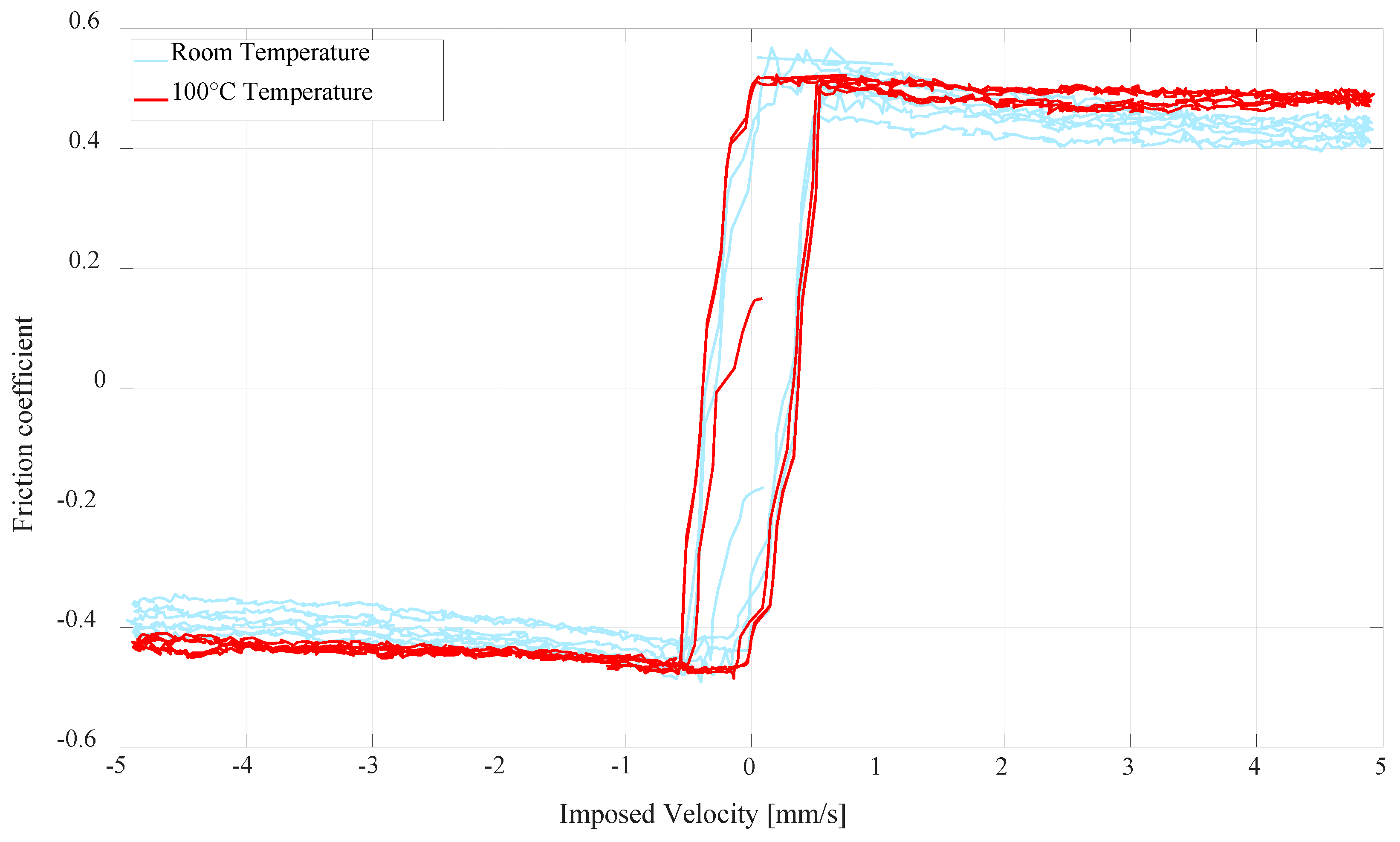
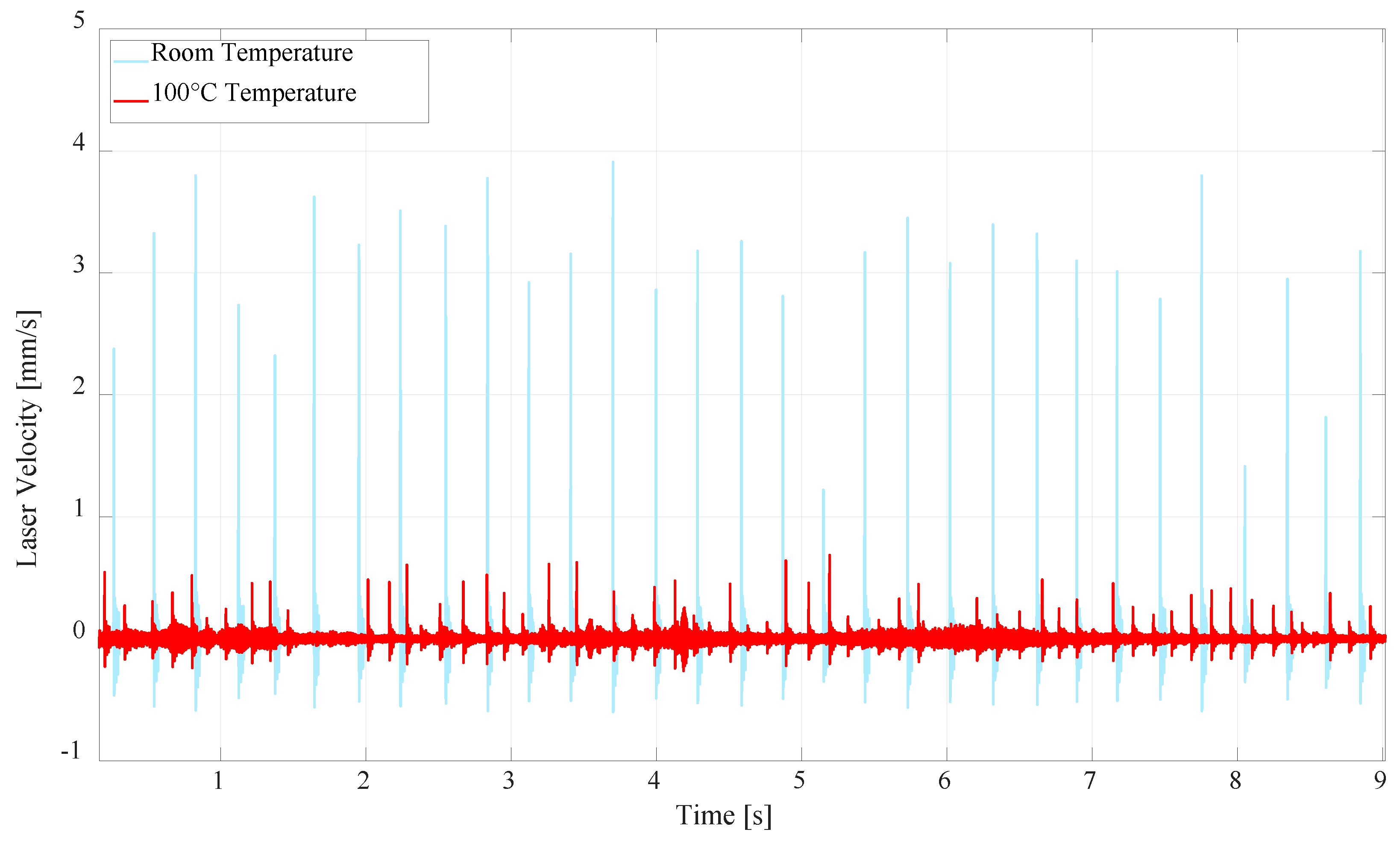
5.2. Material Response VS Temperature
6. Conclusions
- The friction analysis allowed for recovering and clearly identifying different frictional responses for the different materials, with different mean friction coefficient and different friction-velocity trends;
- The analysis of the stick-slip amplitude and the critical velocity range, in which stick-slip occurs, allowed to clearly distinguish the propensity of materials to generate stick-slip instability. The material classification is robust and the results are coherent with returns on groan noise propensity from the automotive tests;
- The comparison between all samples has shown a significant relationship between the frictional response and the stick-slip phenomenon, demonstrating how either a high friction coefficient or the presence of negative friction velocity slope favor the onset of stick-slip.
- Load does not affect significantly the friction coefficient. Instead, an increase in this parameter leads to an increase of the elastic energy cumulated during the sticking phases and released during the sliding phases. This results in a higher amplitude stick-slip response.
- Temperature entails relevant influences both in the dynamical and tribological response of the materials. The friction coefficient increases slightly at highest velocities. Stick-slip phenomena seem to be discouraged by the increase in temperature, due to the decrease of the friction-velocity slope, resulting in lower stick-slip amplitude.
Author Contributions
Conflicts of Interest
References
- Akay, A. Acoustics of friction. J. Acoust. Soc. Am. 2002, 111, 1525–1548. [Google Scholar] [CrossRef] [PubMed]
- Bush, A.; Gibson, R.; Thomas, T. The elastic contact of a rough surface. Wear 1975, 35, 87–111. [Google Scholar] [CrossRef]
- Ibrahim, R.A. Friction-Induced Vibration, Chatter, Squeal, and Chaos—Part I: Mechanics of Contact and Friction. Appl. Mech. Rev. 1994, 47, 209–226. [Google Scholar] [CrossRef]
- Ouenzerfi, G.; Massi, F.; Renault, E.; Berthier, Y. Squeaking friction phenomena in ceramic hip endoprosthesis: Modeling and experimental validation. Mech. Syst. Signal Process. 2015, 58–59, 87–100. [Google Scholar] [CrossRef]
- Sheng, G. Friction-Induced Vibrations and Soud: Principles and Applications; CRC Press Inc.: Boca Raton, FL, USA, 2008. [Google Scholar]
- Koç, I.M.; Eray, T. Modeling frictional dynamics of a visco-elastic pillar rubbed on a smooth surface. Tribol. Int. 2018, 127, 187–199. [Google Scholar]
- Tonazzi, D.; Massi, F.; Culla, A.; Fregolent, A.; Berthier, Y. Role of damping on contact instability scenarios. In Proceedings of the 5° World Tribology Congress, Turin, Italy, 8–13 September 2013; Available online: https://hal.archives-ouvertes.fr/hal-00867046 (accessed on 8 September 2013).
- Tonazzi, D.; Massi, F.; Baillet, L.; Brunetti, J.; Berthier, Y. Interaction between contact behaviour and vibrational response for dry contact system. Mech. Syst. Signal Process. 2018, 110, 110–121. [Google Scholar] [CrossRef]
- Tonazzi, D.; Massi, F.; Baillet, L.; Culla, A.; Fregolent, A.; Regis, E.; Lambert, M. Experimental and numerical characterization of system response under dry frictional contact. In Proceedings of the ISMA—International Conference on Noise and Vibration Engineering, Leuven, France, 15–17 September 2014. [Google Scholar]
- Tonazzi, D.; Massi, F.; Culla, A.; Baillet, L.; Fregolent, A.; Berthier, Y. Instability scenarios between elastic media under frictional contact. Mech. Syst. Signals Process. 2013, 40, 754–766. [Google Scholar] [CrossRef]
- Tonazzi, D.; Massi, F.; Baillet, L.; Culla, A.; Di Bartolomeo, M.; Berthier, Y. Experimental and numerical analysis of frictional contact scenarios: From macro stick–slip to continuous sliding. Meccanica 2015, 50, 649–664. [Google Scholar] [CrossRef]
- Abdelounis, M.B.; Zahouani, H.; Bot, A.L.; Perret-Liaudet, J.; Tkaya, M.B. Numerical simulation of friction noise. Wear 2011, 271, 621–624. [Google Scholar] [CrossRef]
- Bartolomeo, M.D.; Lacerra, G.; Baillet, L.; Chatelet, E.; Massi, F. Parametrical experimental and numerical analysis on friction-induced vibrations by a simple frictional system. Tribol. Int. 2017, 112, 47–57. [Google Scholar] [CrossRef]
- Abdelounis, H.B.; Le Bot, A.; Perret-Liaudet, J.; Zahouani, H. An experimental study on roughness noise of dry rough flat surfaces. Wear 2010, 268, 335–345. [Google Scholar] [CrossRef]
- Lacerra, G.; Di Bartolomeo, M.; Milana, S.; Baillet, L.; Chatelet, E.; Massi, F. Validation of a new frictional law for simulating friction-induced vibrations of rough surfaces. Tribol. Int. 2018, 121, 468–480. [Google Scholar] [CrossRef]
- Bartolomeo, M.D.; Massi, F.; Baillet, L.; Culla, A.; Fregolent, A.; Berthier, Y. Wave and rupture propagation at frictional bimaterial sliding interfaces: From local to global dynamics, from stick-slip to continuos sliding. Tribol. Int. 2012, 52, 117–131. [Google Scholar] [CrossRef]
- Adams, G.G. Steady Sliding of Two Elastic hald spaces with friction reduction due to interface stick-slip. J. Appl. Mech. 1998, 65, 470–475. [Google Scholar] [CrossRef]
- Dieterich, J.H. Time-Dependent Friction and the Mechanics of Stick-Slip. Pure Appl. Geophys. 1978, 116, 790–806. [Google Scholar] [CrossRef]
- Bengisu, M.T.; Akay, A. Stick–slip oscillations: Dynamics of friction and surface roughness. Acoust. Soc. Am. 1999, 105, 194–205. [Google Scholar] [CrossRef]
- Massi, F.; Berthier, Y.; Baillet, L. Contact surface topography and system dynamics of brake squeal. Wear 2008, 256, 1784–1792. [Google Scholar] [CrossRef]
- Kinkaid, N.M.; O’Reilly, O.M.; Papadopoulos, P. Automotive disk brake squeal. J. Sound Vib. 2003, 267, 105–166. [Google Scholar] [CrossRef]
- Meziane, A.; Baillet, L.; Laulagnet, B.; Godeau, C.; Berthier, Y. Friction-induced instabilities: Modal, transient analysis and experimental validation. Méc. Ind. 2007, 8, 597–607. [Google Scholar] [CrossRef]
- Meziane, A.; Baillet, L.; Laulagnet, B. Experimental and numerical investigation of friction-induced vibration of a beam-on-beam in contact with friction. Appl. Acoust. 2010, 71, 843–853. [Google Scholar] [CrossRef]
- Ouyang, H.; Nack, W.; Yuan, Y.; Chen, F. Numerical analysis of automotive disc brake squeal: A review. Int. J. Veh. Noise Vib. 2005, 1, 2017–2231. [Google Scholar] [CrossRef]
- Hervé, B.; Sinou, J.-J.; Mahé, H.; Jezequel, L. Analysis of squeal noise and mode coupling instabilities including damping and gyroscopic effects. Eur. J. Mech. A/Solids 2008, 27, 141–160. [Google Scholar] [CrossRef]
- Kruse, S.; Tiedemann, M.; Zeumer, B.; Reuss, P.; Hetzler, H.; Hoffmann, N. The influence of joints on friction induced vibration in brake squeal. J. Sound Vib. 2015, 340, 239–252. [Google Scholar] [CrossRef]
- Hoffmann, N.; Fischer, M.; Allgaier, R.; Gaul, L. A minimal model for studying properties of the mode coupling type instability in friction induced oscillations. Mech. Res. Commun. 2002, 29, 197–205. [Google Scholar] [CrossRef]
- Magnier, V.; Naidoo Ramasami, D.; Brunel, J.F.; Dufrénoy, P.; Chancelier, T. History effect on squeal with a mesoscopic approach to friction materials. Tribol. Int. 2017, 115, 600–607. [Google Scholar] [CrossRef]
- Crowther, A.R.; Singh, R. Identification and quantification of stick-slip induced brake groan events using experimental and analytical investigations. Noise Control Eng. J. 2008, 56, 235–255. [Google Scholar] [CrossRef]
- Jang, H.; Lee, J.S.; Fash, J.W. Compositional effects of the brake friction material on creep groan phenomena. Wear 2001, 251, 1477–1483. [Google Scholar] [CrossRef]
- Martens, J.A.C.; Oden, J.T.; Simoes, F.M.F. A study of static and kinetic friction. Int. J. Eng. Sci. 1990, 28, 29–92. [Google Scholar] [CrossRef]
- Zhao, X.; Gräbner, N.; von Wagner, U. Theoretical and experimental investigations of the bifurcation behavior of creep groan of automotive disk brakes. J. Theor. Appl. Mech. 2018, 56, 351–364. [Google Scholar] [CrossRef]
- Kruse, S.; Stingl, B.; Hieke, J.; Papangelo, A.; Tiedemann, M.; Hoffmann, N.; Ciavarella, M. The influence of loading conditions on the static coefficient of friction: A study on brake creep groan. In Topics in Modal Analysis I, Volume 7. Conference Proceedings of the Society for Experimental Mechanics Series; De Clerck, J., Ed.; Springer: Cham, Switzerland, 2014; pp. 149–160. [Google Scholar]
- Brecht, J.; Schiffner, K. Influence of Friction Law on Brake Creep-Groan; SAE Technical Paper 2001-01-3138; SAE: Warrendale, PA, USA, 2001. [Google Scholar] [CrossRef]
- SAE. International Surface Vehicle Recommended Practice, Disc and Drum Brake Dynamometer Squeal Noise Matrix, SAE Standard J2521; SAE: Warrendale, PA, USA, 2006. [Google Scholar]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Time Sequence | Velocity (mm/s) | Displacement (mm) | Number of Cycles | Acceleration (mm/s2) |
|---|---|---|---|---|
| Constant velocity tests | ||||
| 1° | 10 | 18 | 10 | |
| 2° | 0.1 | 3 | 3 | |
| 3° | 0.5 | 10 | 3 | |
| 4° | 1 | 18 | 3 | |
| 5° | 5 | 18 | 3 | |
| Variable velocity tests | ||||
| 6° | From 0 to 5 mm/s linear velocity ramp | 18 | 3 | 1.5 |
| Validation test | ||||
| 7° | 1 | 18 | 3 | |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lazzari, A.; Tonazzi, D.; Conidi, G.; Malmassari, C.; Cerutti, A.; Massi, F. Experimental Evaluation of Brake Pad Material Propensity to Stick-Slip and Groan Noise Emission. Lubricants 2018, 6, 107. https://doi.org/10.3390/lubricants6040107
Lazzari A, Tonazzi D, Conidi G, Malmassari C, Cerutti A, Massi F. Experimental Evaluation of Brake Pad Material Propensity to Stick-Slip and Groan Noise Emission. Lubricants. 2018; 6(4):107. https://doi.org/10.3390/lubricants6040107
Chicago/Turabian StyleLazzari, Alessandro, Davide Tonazzi, Giovanni Conidi, Cristian Malmassari, Andrea Cerutti, and Francesco Massi. 2018. "Experimental Evaluation of Brake Pad Material Propensity to Stick-Slip and Groan Noise Emission" Lubricants 6, no. 4: 107. https://doi.org/10.3390/lubricants6040107
APA StyleLazzari, A., Tonazzi, D., Conidi, G., Malmassari, C., Cerutti, A., & Massi, F. (2018). Experimental Evaluation of Brake Pad Material Propensity to Stick-Slip and Groan Noise Emission. Lubricants, 6(4), 107. https://doi.org/10.3390/lubricants6040107