Dynamic Modeling and Behavior of Cylindrical Roller Bearings Considering Roller Skew and the Influence of Eccentric Load

Abstract
1. Introduction
2. Dynamic Model for Cylindrical Roller Bearings
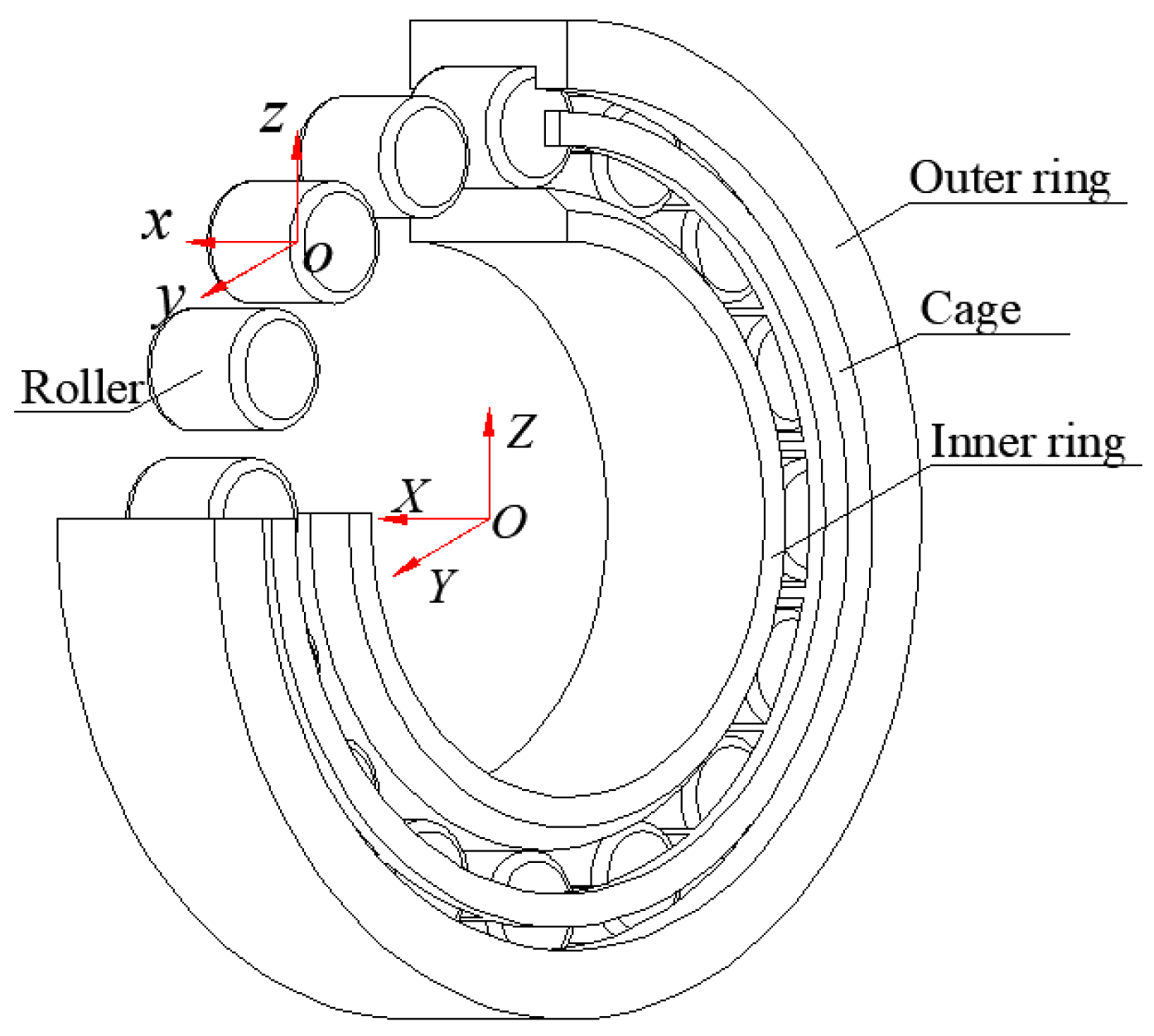
2.1. Coordinates and Fundamental Assumptions
- (1)
- The centroids and geometric centers of all components in the bearing coincide.
- (2)
- All components are rigid bodies, and flexible deformation is not considered.
- (3)
- The outer ring is fixed, the inner ring rotates about its own centroid, rollers revolve about the bearing axis and rotate about their own axes with skewing, and the cage rotates about its own centroid.
- (4)
- The cage pocket shape is rectangular, and the centroids of all bearing components coincide with their centers of mass.
- (5)
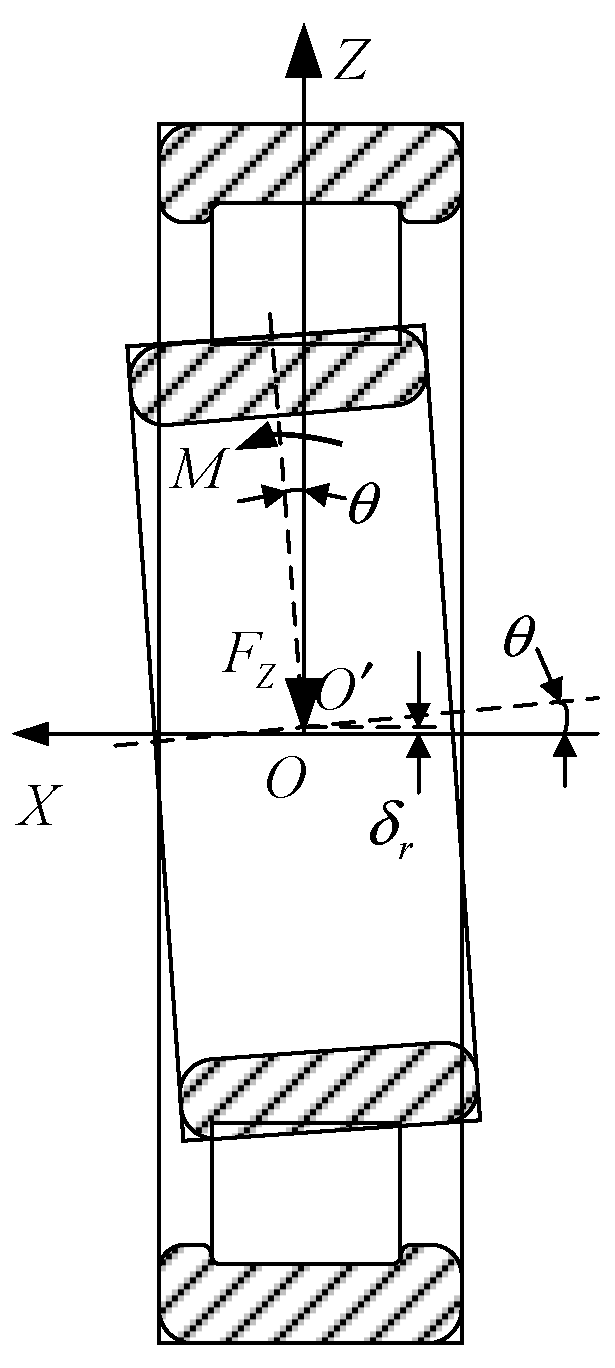
- Each individual roller has three degrees of freedom: , , and . These correspond to rotation about the X-axis, rotation about its own axis , and angular displacement due to skewing about the Z-axis .
- (6)
- The cage has a rotational angular displacement about the X-axis .
- (7)
- The cylindrical roller bearing has 3 N + 1 degrees of freedom, where N denotes the total number of rollers; its displacement is denoted as .
2.2. Differential Equations of Motion
- (1)
- Roller Motion Differential Equations
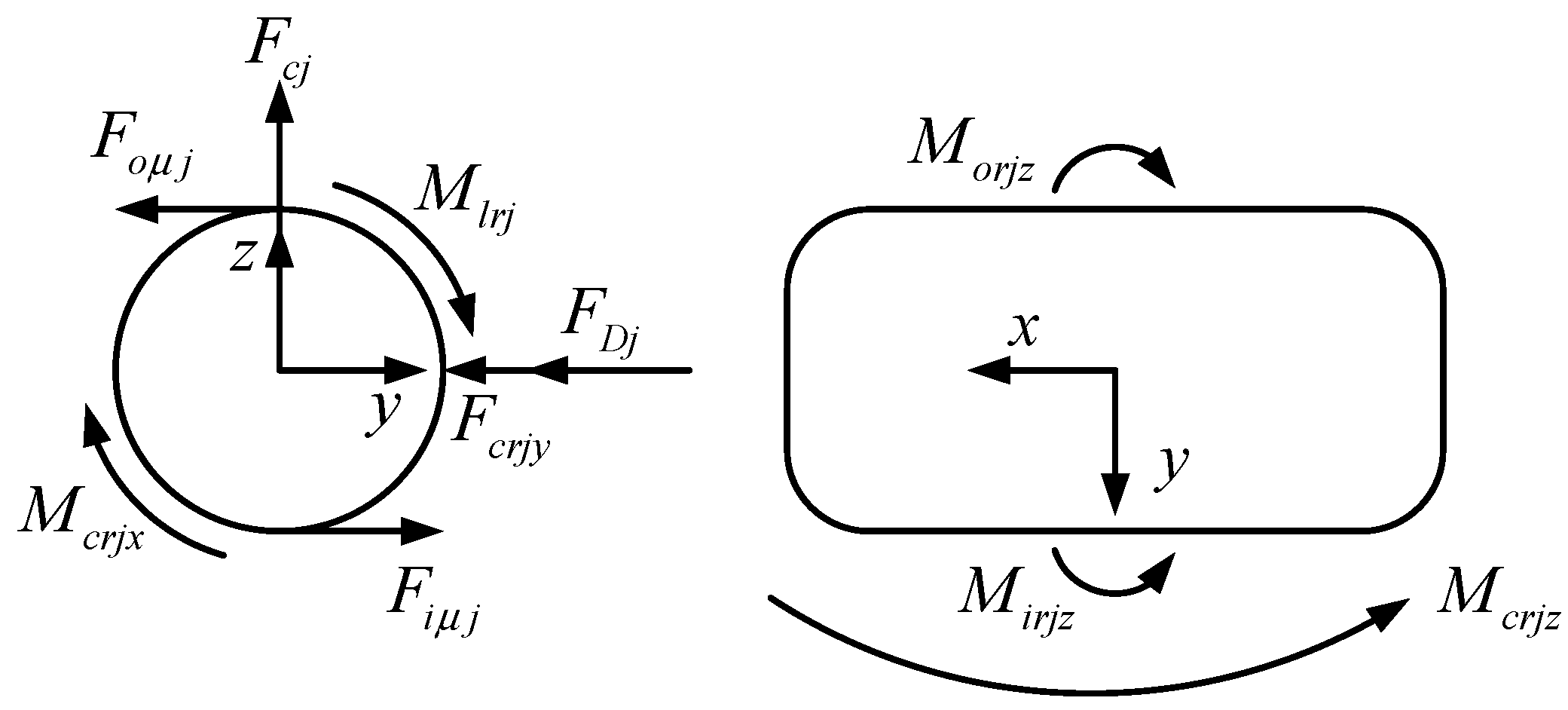
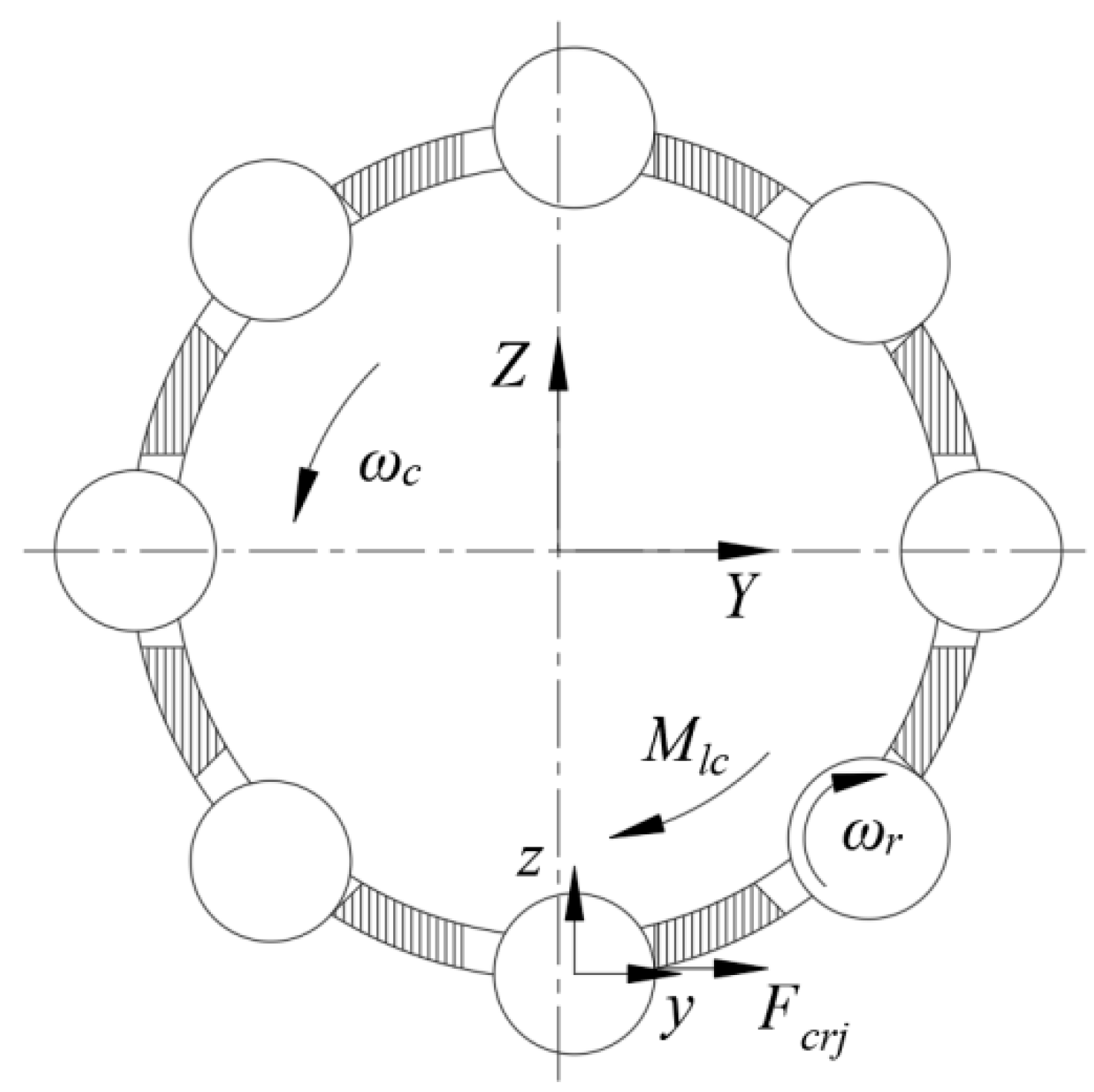
2.3. Internal Forces
- (1)
- Forces between the roller and the raceway
- (2)
- Roller and cage interaction
2.4. Calculation Process
- (1)
- The initial motion parameter of the bearing is determined by calculating the initial value of the dynamic equation.
- (2)
- The Newton–Raphson method is employed to solve the nonlinear equilibrium equations of the inner ring and the roller, thereby obtaining the contact force between the roller slice and the raceway.
- (3)
- Through the interaction of bearing parts, the drag force of the raceway on the roller, the interaction force between the roller and the cage, and the resistance of the lubricant are obtained.
- (4)
- The aforementioned results are then utilized as initial values in solving dynamics equations for both roller and cage using the Newmark-β method.
2.5. Model Verification
3. Dynamic Characteristics Analysis of Cylindrical Roller Bearing
4. Dynamic Characteristics of Cylindrical Roller Bearing under Unbalanced Load Conditions
4.1. Effect of Rotational Speed on Dynamic Characteristics of Cylindrical Roller Bearing
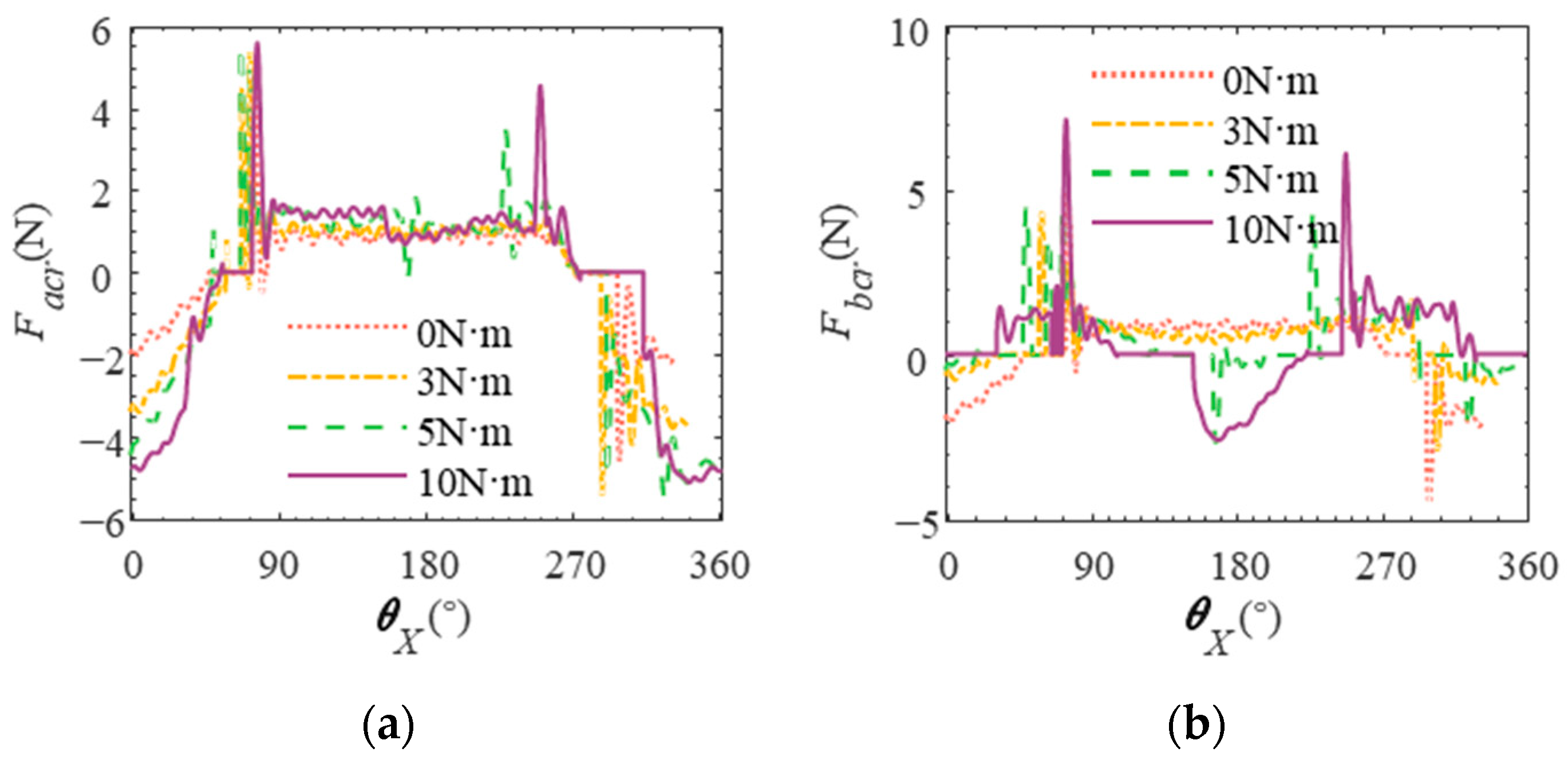
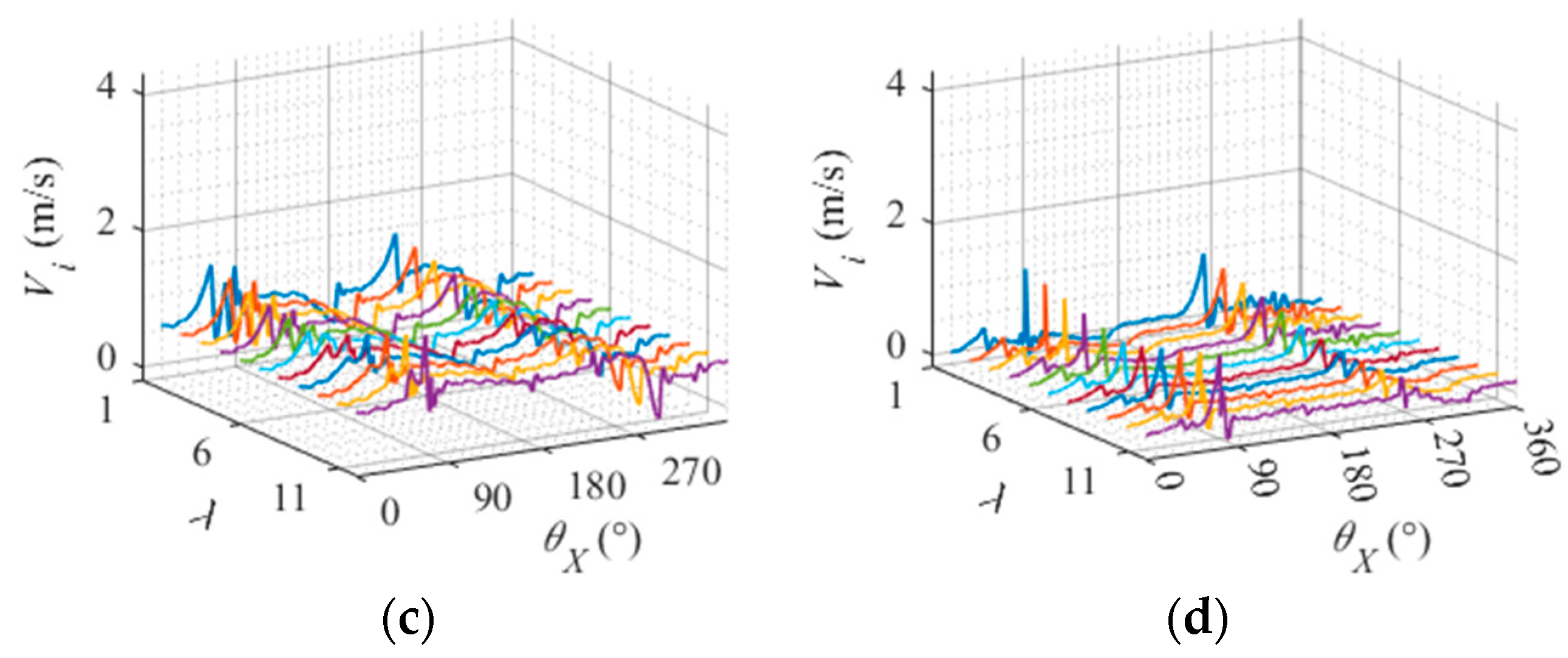
4.2. Effect of Torque Load on Dynamic Characteristics of Cylindrical Roller Bearing
5. Conclusions
- (1)
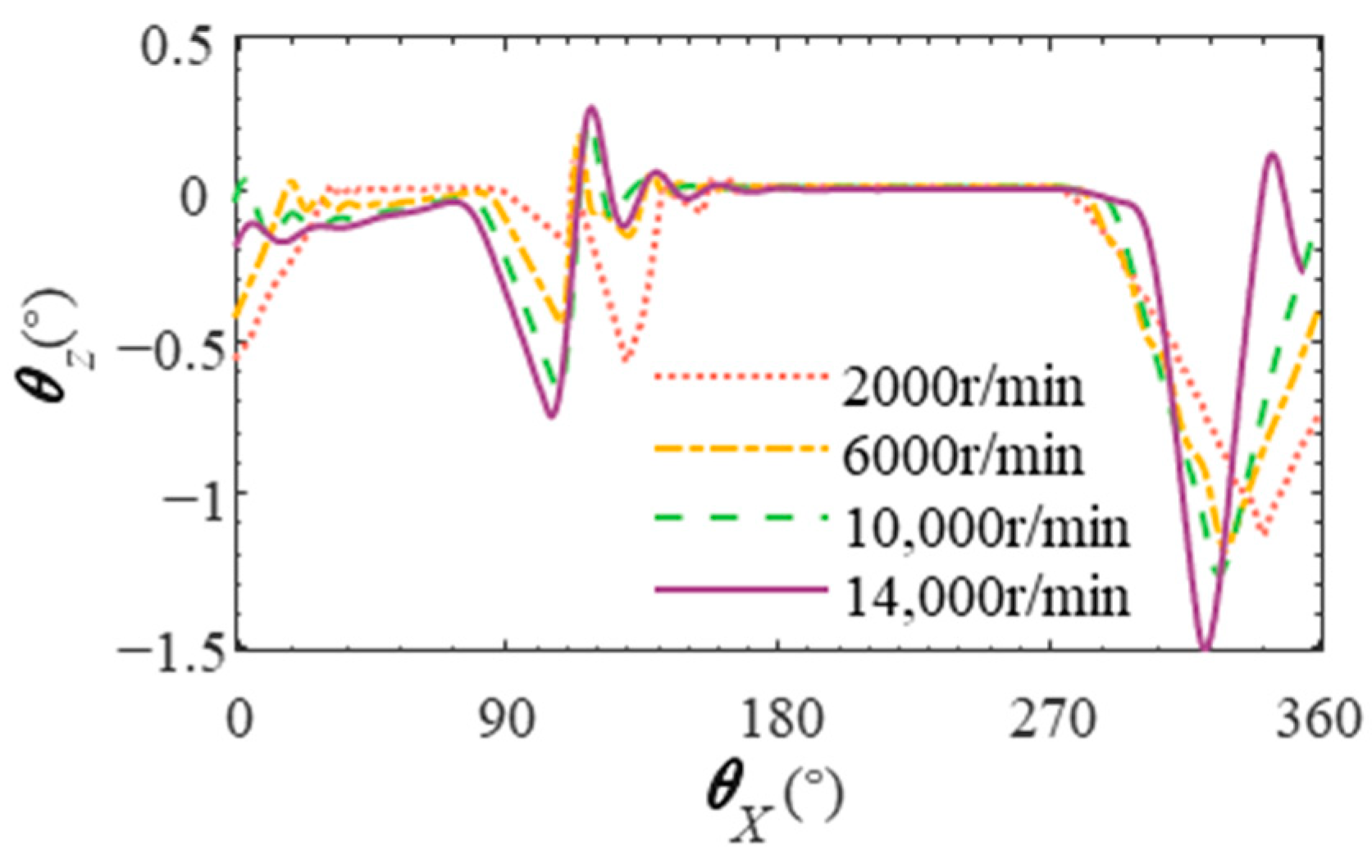
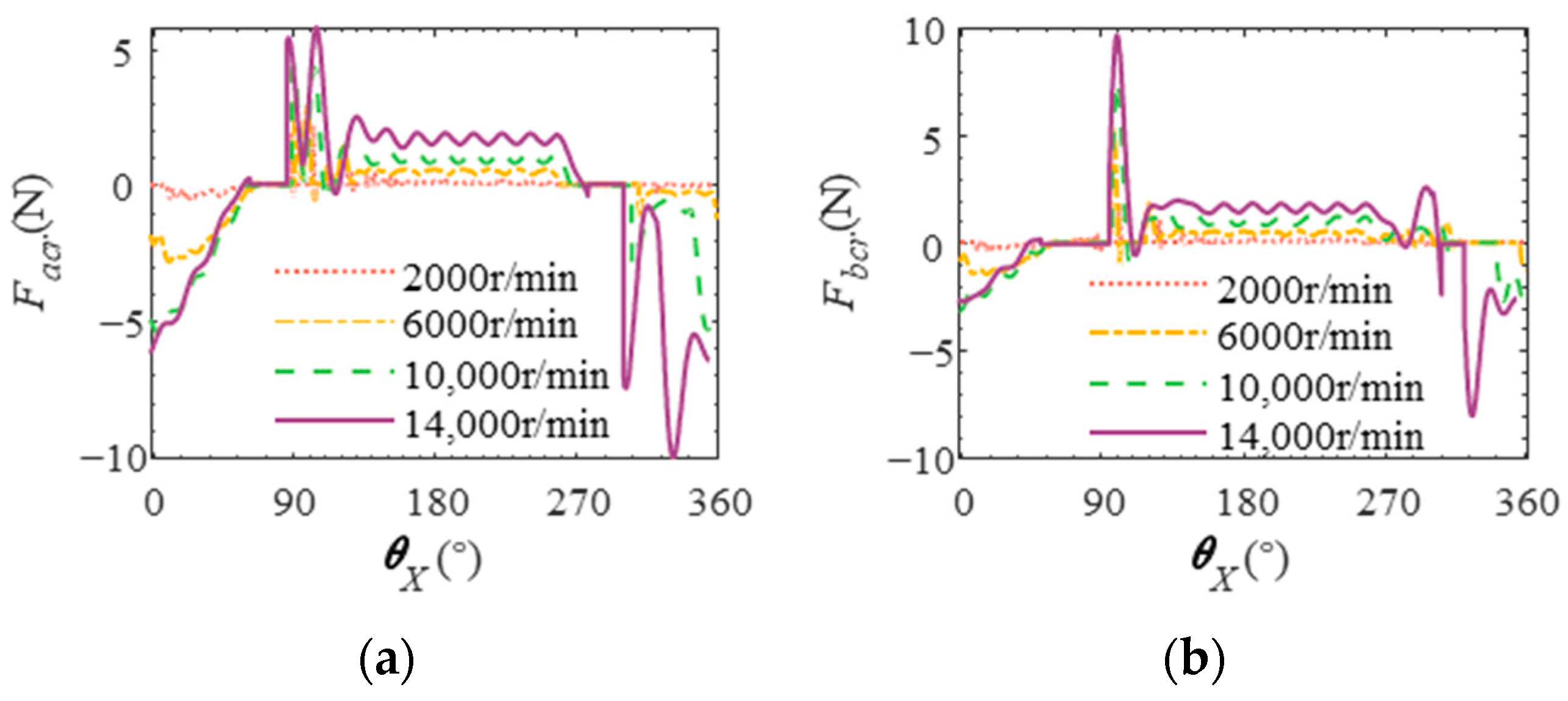
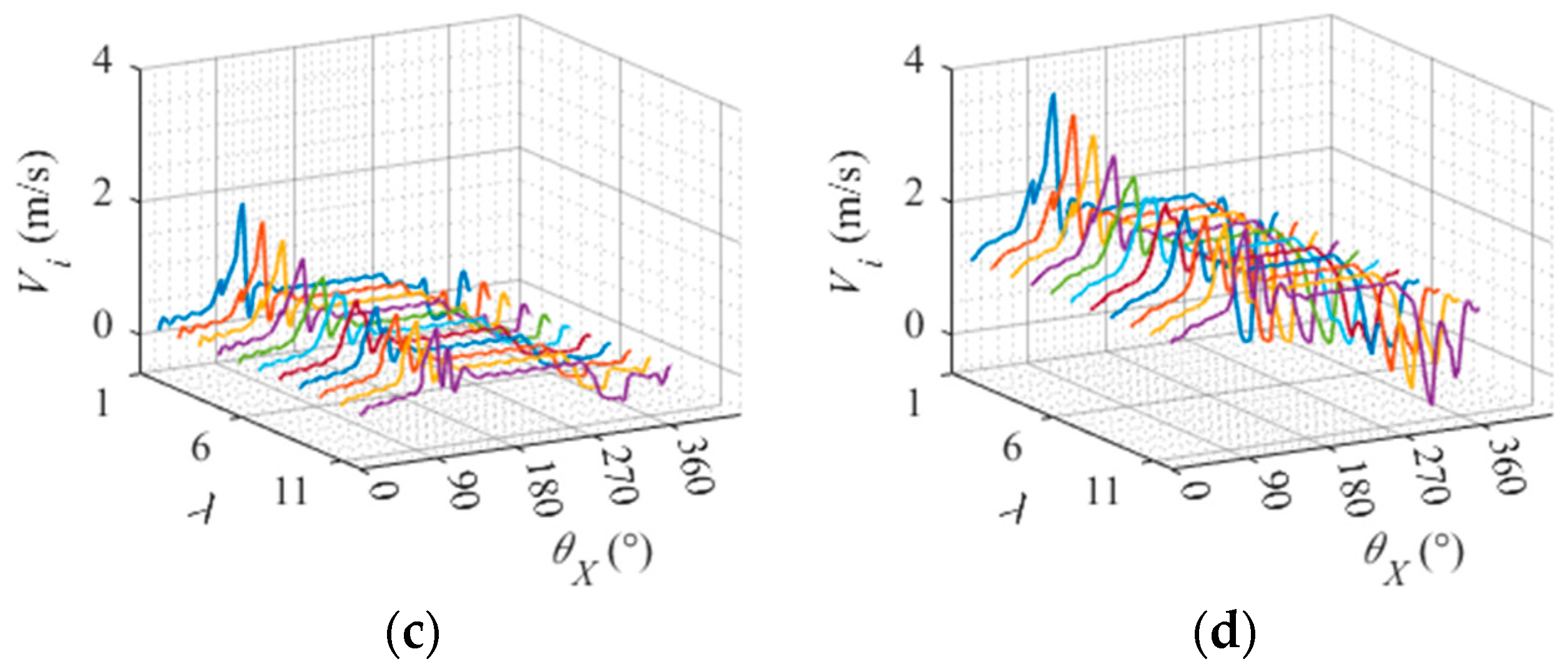
- The increase in rotational speed leads to a rise in the relative sliding speed between the roller and the raceway, resulting in a higher skew angle and an augmented normal force exerted by the cage on the roller. Moreover, this also amplifies the disparity in relative sliding speeds between different slices of rollers and raceway, as well as intensifies the variation in drag forces experienced by different sections of rollers on the raceway.
- (2)
- The relative sliding speed between the roller and raceway decreases as the radial load increases, leading to a decrease in skew angle and the normal force of the cage on the roller. Additionally, there is a reduction in the relative sliding speed difference between different roller slices and raceway, as well as a decrease in drag force difference between the raceway and different roller slices.
- (3)
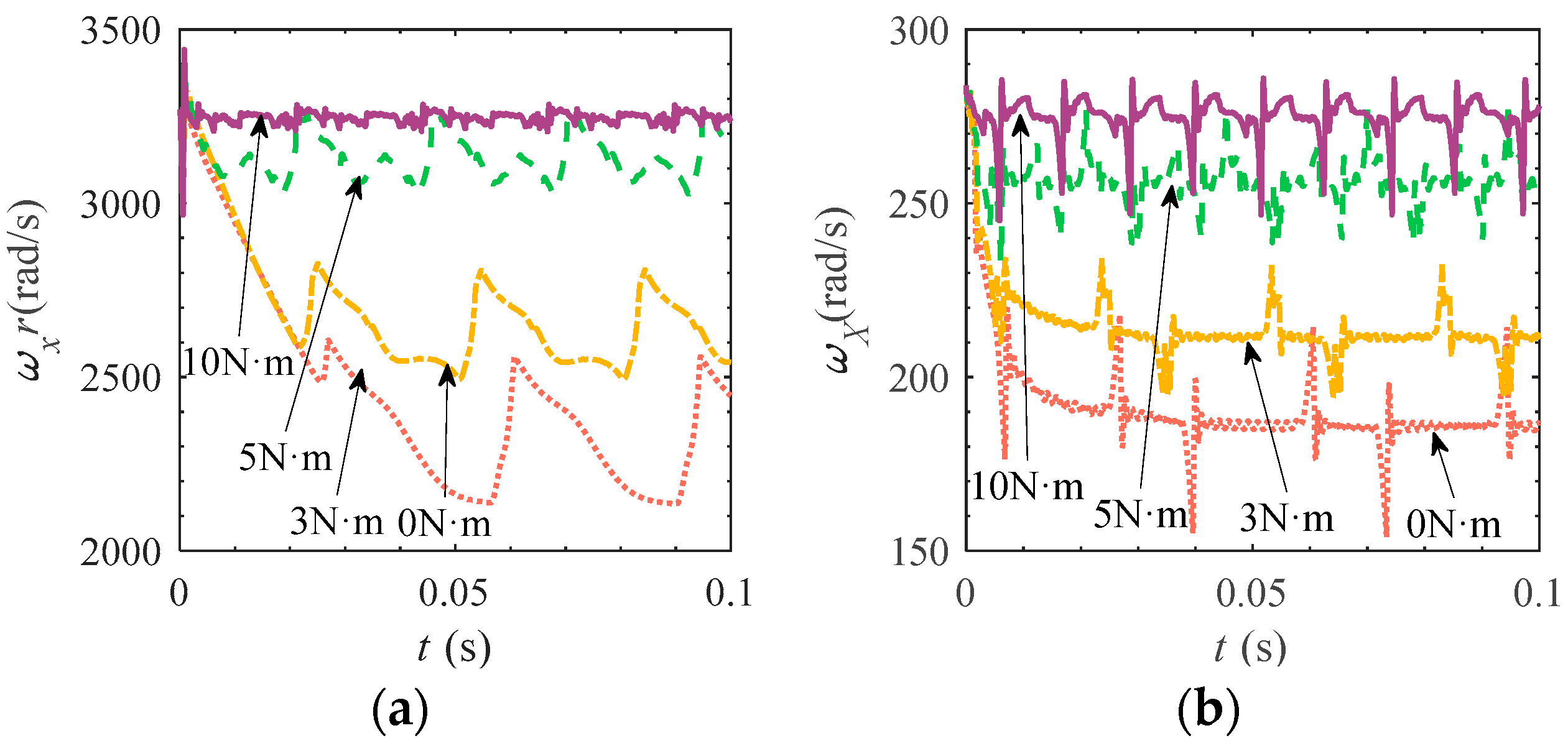
- When the torque load increases, the relative sliding speed between the roller and the raceway decreases, resulting in an increase in skew angle and a decrease in the normal force of the cage on the roller. Additionally, there is an increased difference in relative sliding speed between different slices of rollers and the raceway, as well as an increased difference in drag force between different slices of rollers on the raceway.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Walters, C.T. The Dynamics of Ball Bearings. J. Lubr. Technol. 1971, 93, 1–10. [Google Scholar] [CrossRef]
- Gupta, P.K. Dynamics of Rolling-Element Bearings—Part I: Cylindrical Roller Bearing Analysis. J. Lubr. Technol. 1979, 101, 293–302. [Google Scholar] [CrossRef]
- Meeks, C.R. The dynamics of ball separators in ball bearings—Part II: Results of optimization study. ASLE Trans. 1985, 28, 288–295. [Google Scholar] [CrossRef]
- Meeks, C.R.; Ng, K.O. The dynamics of ball separators in ball bearings—Part I: Analysis. ASLE Trans. 1985, 28, 277–287. [Google Scholar] [CrossRef]
- Meeks, C.R.; Tran, L. Ball Bearing Dynamic Analysis Using Computer Methods—Part I: Analysis. J. Tribol. 1996, 118, 52–58. [Google Scholar] [CrossRef]
- Xi, H.; Wang, H.Y.; Han, W.; Le, Y.; Xu, H.; Chen, W.; Xu, S.N.; Wang, F.C. Contact trajectory of angular contact ball bearings under dynamic operating condition. Tribol. Int. 2016, 104, 247–262. [Google Scholar] [CrossRef]
- Ye, Z.; Wang, L. Effect of external loads on cage stability of high-speed ball bearings. Proc. Inst. Mech. Eng. Part J J. Eng. Tribol. 2015, 229, 1300–1318. [Google Scholar] [CrossRef]
- Shan, W.; Chen, Y.; Wang, X.; Yu, C.; Wu, K.; Han, Z. Nonlinear Dynamic Characteristics of Deep Groove Ball Bearings with an Improved Contact Model. Machines 2023, 11, 340. [Google Scholar] [CrossRef]
- Zhao, D.; Hong, J.; Yan, K.; Zhao, Q.; Fang, B. Dynamic interaction between the rolling element and cage of rolling bearing considering cage flexibility and clearance. Mech. Mach. Theory 2022, 174, 104905. [Google Scholar] [CrossRef]
- Ye, Z.H.; Wang, L.Q. Cage Instabilities in High-Speed Ball Bearings. Appl. Mech. Mater. 2013, 278–280, 3–6. [Google Scholar] [CrossRef]
- Wang, Z.; Song, J.; Li, X.; Yu, Q. Modeling and Dynamic Analysis of Cylindrical Roller Bearings Under Combined Radial and Axial Loads. J. Tribol. 2022, 144, 121203. [Google Scholar] [CrossRef]
- Han, Q.; Li, X.; Chu, F. Skidding behavior of cylindrical roller bearings under time-variable load conditions. Int. J. Mech. Sci. 2018, 135, 203–214. [Google Scholar] [CrossRef]
- Chen, S.; Chen, X.; Li, Q.; Gu, J. Experimental Study on Cage Dynamic Characteristics of Angular Contact Ball Bearing in Acceleration and Deceleration Process. Tribol. Trans. 2021, 64, 42–52. [Google Scholar] [CrossRef]
- Liu, Y.; Chen, Z.; Wang, K.; Zhai, W. Non-uniform roller-race contact performance of bearings along width in the rotor-bearing system under dynamic loads. J. Sound Vib. 2022, 538, 117251. [Google Scholar] [CrossRef]
- Gao, S.; Wang, L.; Zhang, Y. Modeling and dynamic characteristic analysis of high speed angular contact ball bearing with variable clearance. Tribol. Int. 2023, 182, 108330. [Google Scholar] [CrossRef]
- Gao, S.; Han, Q.; Zhou, N.; Pennacchi, P.; Chatterton, S.; Qing, T.; Zhang, J.; Chu, F. Experimental and theoretical approaches for determining cage motion dynamic characteristics of angular contact ball bearings considering whirling and overall skidding behaviors. Mech. Syst. Signal Process. 2022, 168, 108704. [Google Scholar] [CrossRef]
- Gao, S.; Chatterton, S.; Pennacchi, P.; Han, Q.; Chu, F. Skidding and cage whirling of angular contact ball bearings: Kinematic-hertzian contact-thermal-elasto-hydrodynamic model with thermal expansion and experimental validation. Mech. Syst. Signal Process. 2022, 166, 108427. [Google Scholar] [CrossRef]
- Cao, W.; Wang, J.; Pu, W.; Zhang, Y.; Wu, J.; Chu, K.; Wu, H. A study on the effect of acceleration on slip velocity and lubrication performance in cylindrical roller bearings. Proc. Inst. Mech. Eng. Part J J. Eng. Tribol. 2016, 230, 1231–1243. [Google Scholar] [CrossRef]
- Prisacaru, G.; Bercea, I.; Cretu, S.; Mitu, N. Load distribution in a cylindrical roller bearing in high speed and combined load conditions. Eur. J. Mech. Eng. 1995, 40, 19–25. [Google Scholar]
- Kabus, S.; Hansen, M.R.; Mouritsen, O.Ø. A New Quasi-Static Cylindrical Roller Bearing Model to Accurately Consider Non-Hertzian Contact Pressure in Time Domain Simulations. J. Tribol. 2012, 134, 041401. [Google Scholar] [CrossRef]
- Chen, H.; Zhang, H.; Liang, H.; Wang, W. The collision and cage stability of cylindrical roller bearing considering cage flexibility. Tribol. Int. 2024, 192, 109219. [Google Scholar] [CrossRef]
- de Nul, J.M.; Vree, J.M.; Maas, D.A. Equilibrium and Associated Load Distribution in Ball and Roller Bearings Loaded in Five Degrees of Freedom While Neglecting Friction—Part II: Application to Roller Bearings and Experimental Verification. J. Tribol. 1989, 111, 149–155. [Google Scholar] [CrossRef]
- Harris, T.A.; Kotzalas, M.N. Rolling Bearing Analysis—2 Volume Set; CRC Press: Boca Raton, FL, USA, 2006. [Google Scholar]
- Wang, Y.; Zhang, G.; Wang, E. Traction Behavior of No. 4129 Synthetic Oil for Space Lubrication. J. Fail. Anal. Prev. 2019, 19, 138–143. [Google Scholar] [CrossRef]
- Cui, Y.; Deng, S.; Yang, H.; Zhang, W.; Niu, R. Effect of cage dynamic unbalance on the cage’s dynamic characteristics in high-speed cylindrical roller bearings. Ind. Lubr. Tribol. 2019, 71, 1125–1135. [Google Scholar] [CrossRef]
- Tu, W.; Liang, J.; Yu, W.; Shi, Z.; Liu, C. Motion stability analysis of cage of rolling bearing under the variable-speed condition. Nonlinear Dyn. 2023, 111, 11045–11063. [Google Scholar] [CrossRef]
- Harris, T.A. An Analytical Method to Predict Skidding in High Speed Roller Bearings. ASLE Trans. 1966, 9, 229–241. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Numerical Value |
|---|---|
| Number of rollers | 36 |
| Bearing outer ring diameter (mm) | 220 |
| Bearing inner ring diameter (mm) | 146 |
| Roller diameter (mm) | 14 |
| Total length of roller (mm) | 20 |
| Effective roller length (mm) | 17 |
| Roller trim radius (mm) | 40 |
| Radial clearance (mm) | 0.064 |
| Elastic modulus of roller (GPa) | 207 |
| Elastic modulus of inner and outer raceway (GPa) | 207 |
| Poisson ratio of rollers | 0.3 |
| Poisson ratio of inside and outside raceway | 0.3 |
| Roller density (kg·m−3) | 7850 |
| Inner and outer ring density (kg·m−3) | 7850 |
| Parameter | Numerical Value |
|---|---|
| Number of rollers | 20 |
| Bearing outer ring diameter (mm) | 60 |
| Bearing inner ring diameter (mm) | 30 |
| Roller diameter (mm) | 4 |
| Total length of roller (mm) | 25.5 |
| Effective roller length (mm) | 22.95 |
| Roller trim radius (mm) | 20 |
| Radial clearance (mm) | 0.01 |
| Elastic modulus of roller (GPa) | 207 |
| Elastic modulus of inner and outer raceway (GPa) | 207 |
| Poisson ratio of rollers | 0.3 |
| Poisson ratio of inside and outside raceway | 0.3 |
| Roller density (kg·m−3) | 7850 |
| Inner and outer ring density (kg·m−3) | 7850 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, Y.; Wang, J.; Wang, M.; Wen, B. Dynamic Modeling and Behavior of Cylindrical Roller Bearings Considering Roller Skew and the Influence of Eccentric Load. Lubricants 2024, 12, 317. https://doi.org/10.3390/lubricants12090317
Yang Y, Wang J, Wang M, Wen B. Dynamic Modeling and Behavior of Cylindrical Roller Bearings Considering Roller Skew and the Influence of Eccentric Load. Lubricants. 2024; 12(9):317. https://doi.org/10.3390/lubricants12090317
Chicago/Turabian StyleYang, Yang, Jiayu Wang, Meiling Wang, and Baogang Wen. 2024. "Dynamic Modeling and Behavior of Cylindrical Roller Bearings Considering Roller Skew and the Influence of Eccentric Load" Lubricants 12, no. 9: 317. https://doi.org/10.3390/lubricants12090317
APA StyleYang, Y., Wang, J., Wang, M., & Wen, B. (2024). Dynamic Modeling and Behavior of Cylindrical Roller Bearings Considering Roller Skew and the Influence of Eccentric Load. Lubricants, 12(9), 317. https://doi.org/10.3390/lubricants12090317