Electrification of a Mini Traction Machine and Initial Test Results


Abstract
1. Introduction
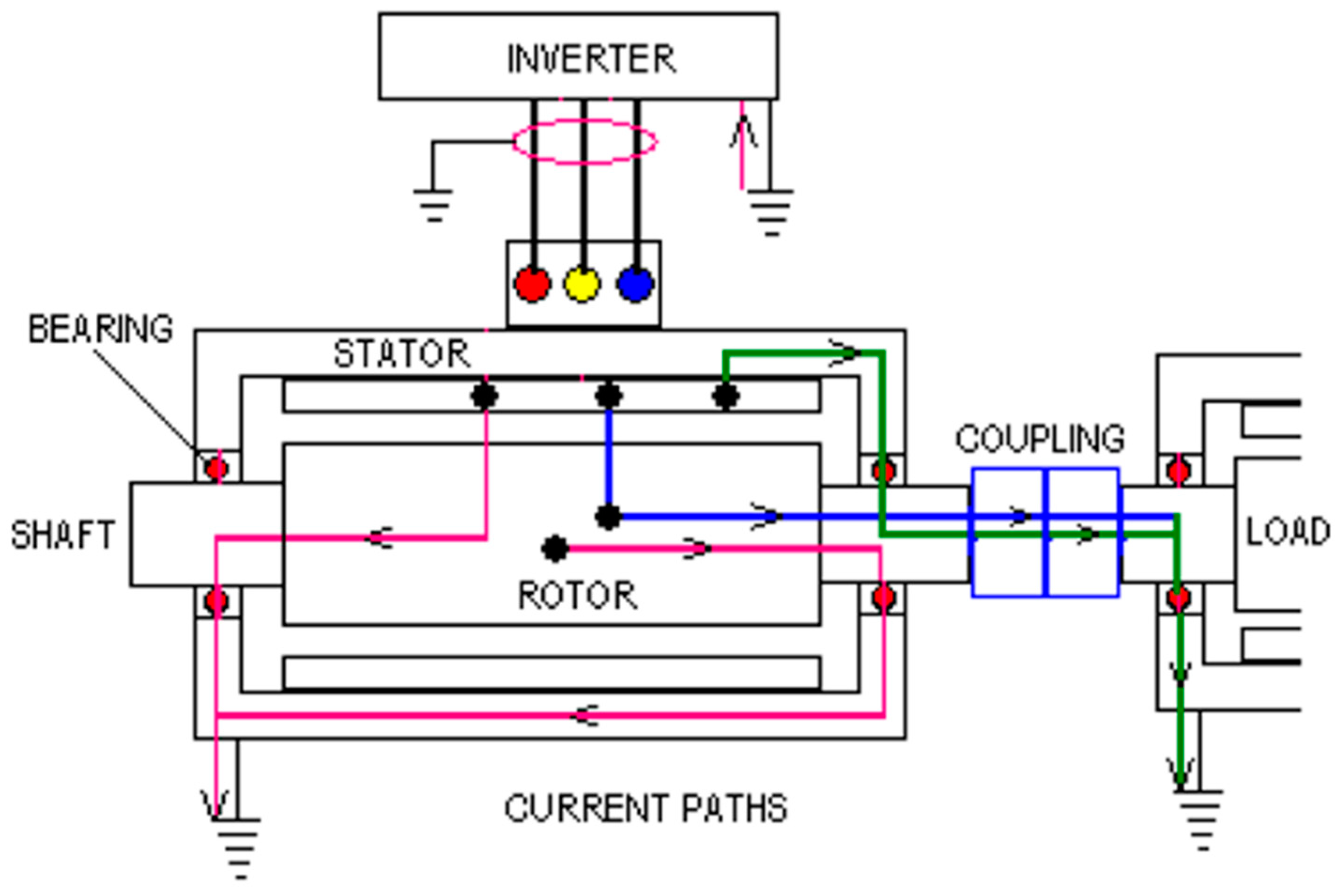
2. Background
3. Materials and Methods
3.1. Overview
3.2. Test Parameters
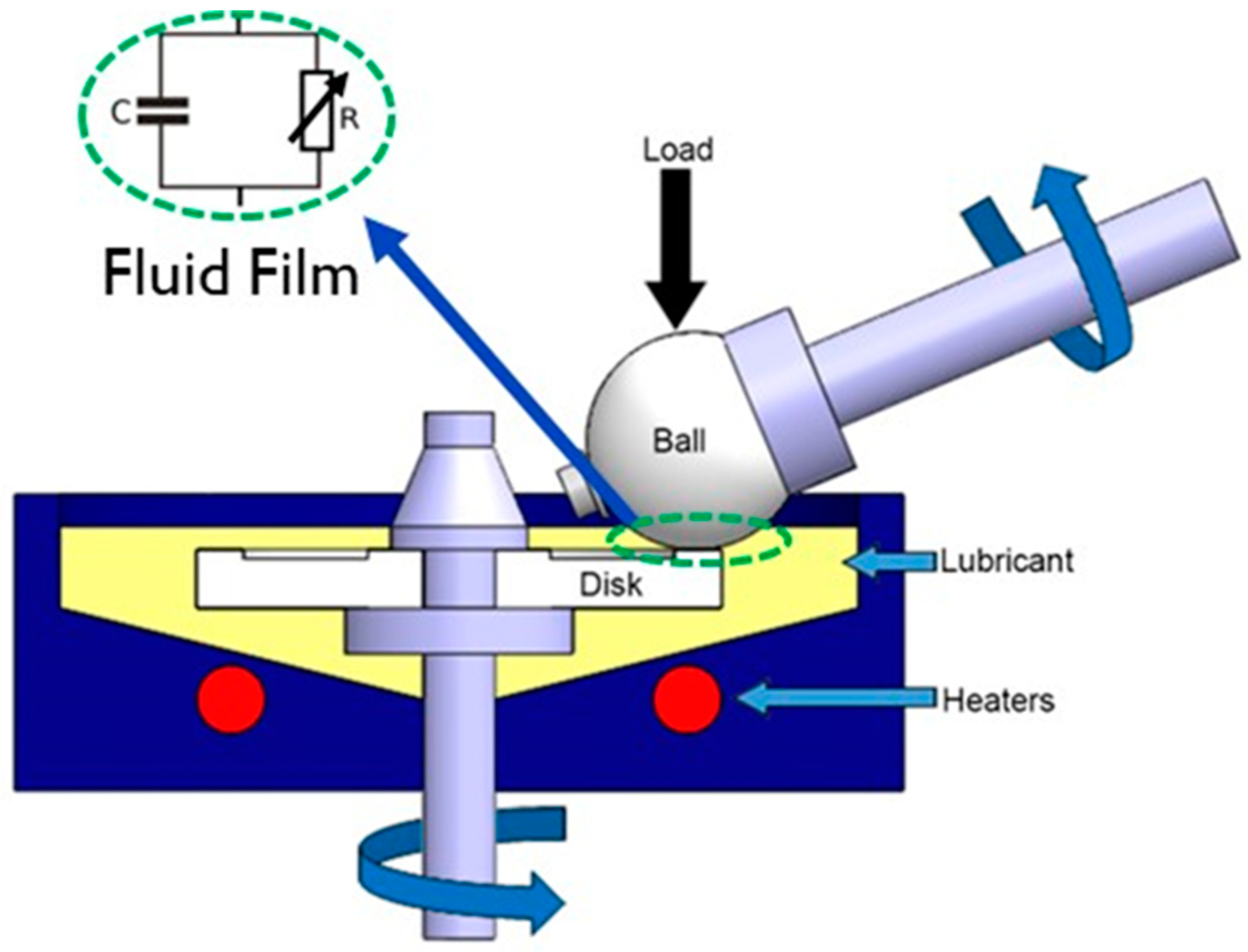
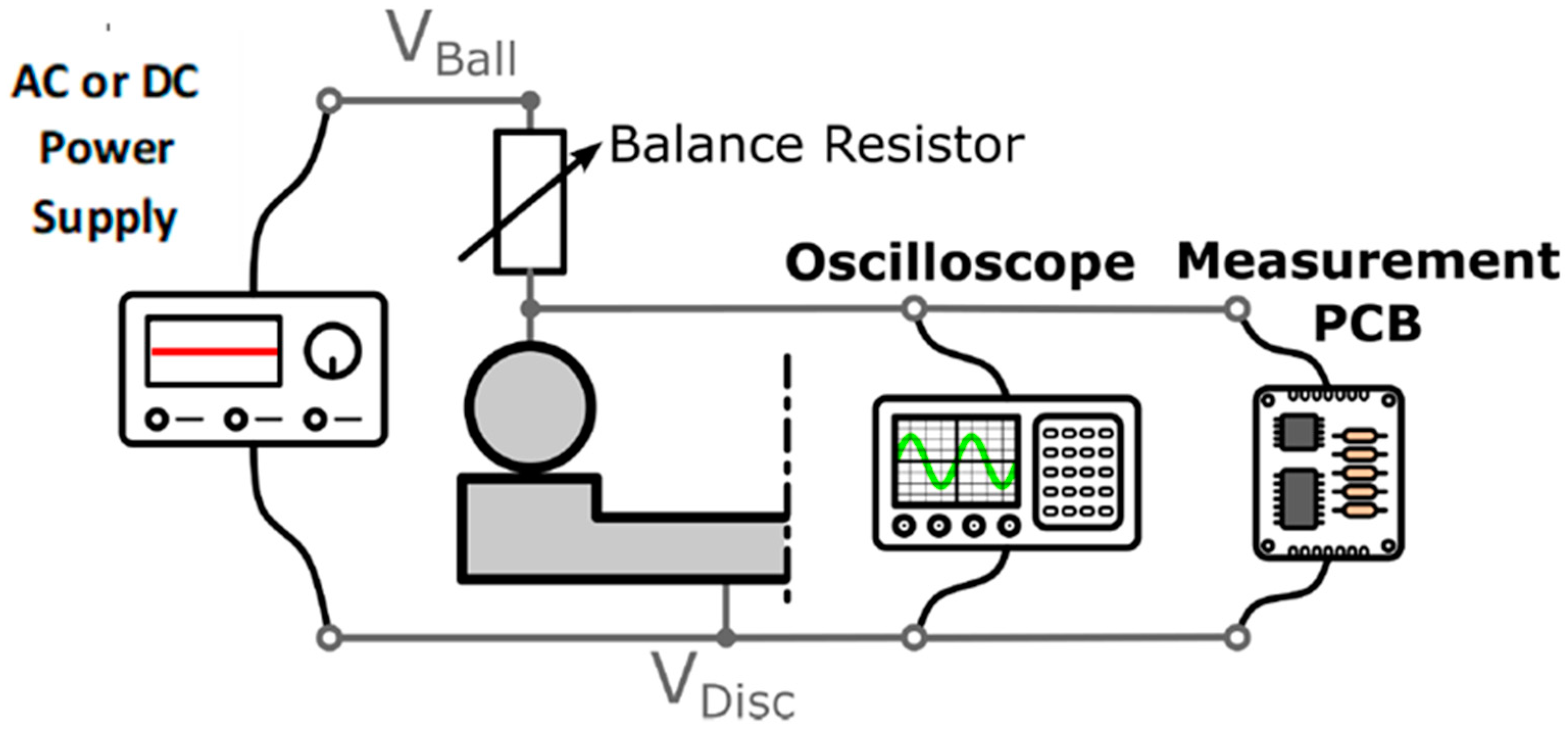
3.3. Test Rig
3.4. Test Fluids and Parts
3.5. Test Procedure
3.6. Wear Measurements
3.7. Lubricant Properties
4. Results and Discussion
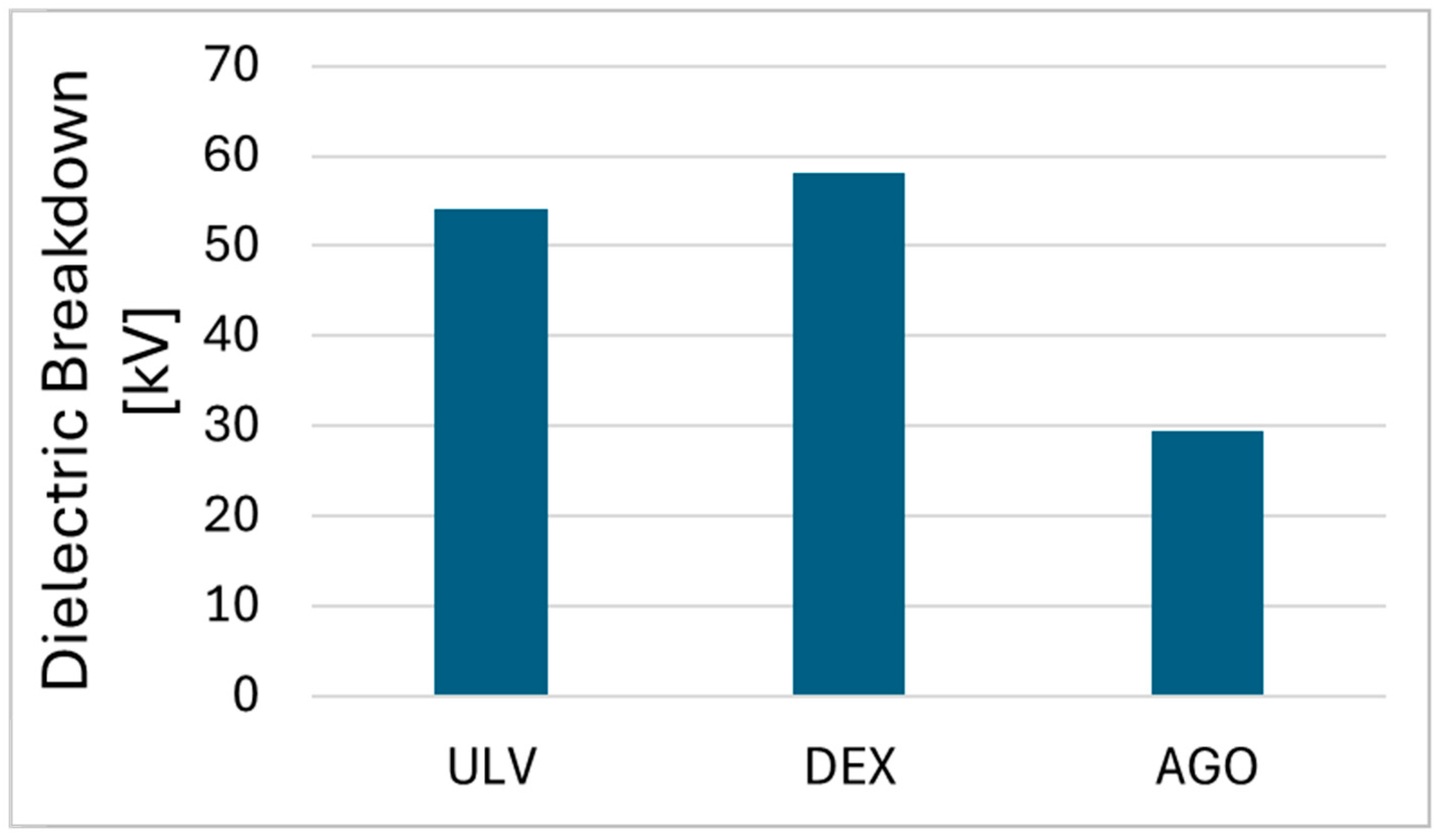
4.1. Lubricant Breakdown Voltage
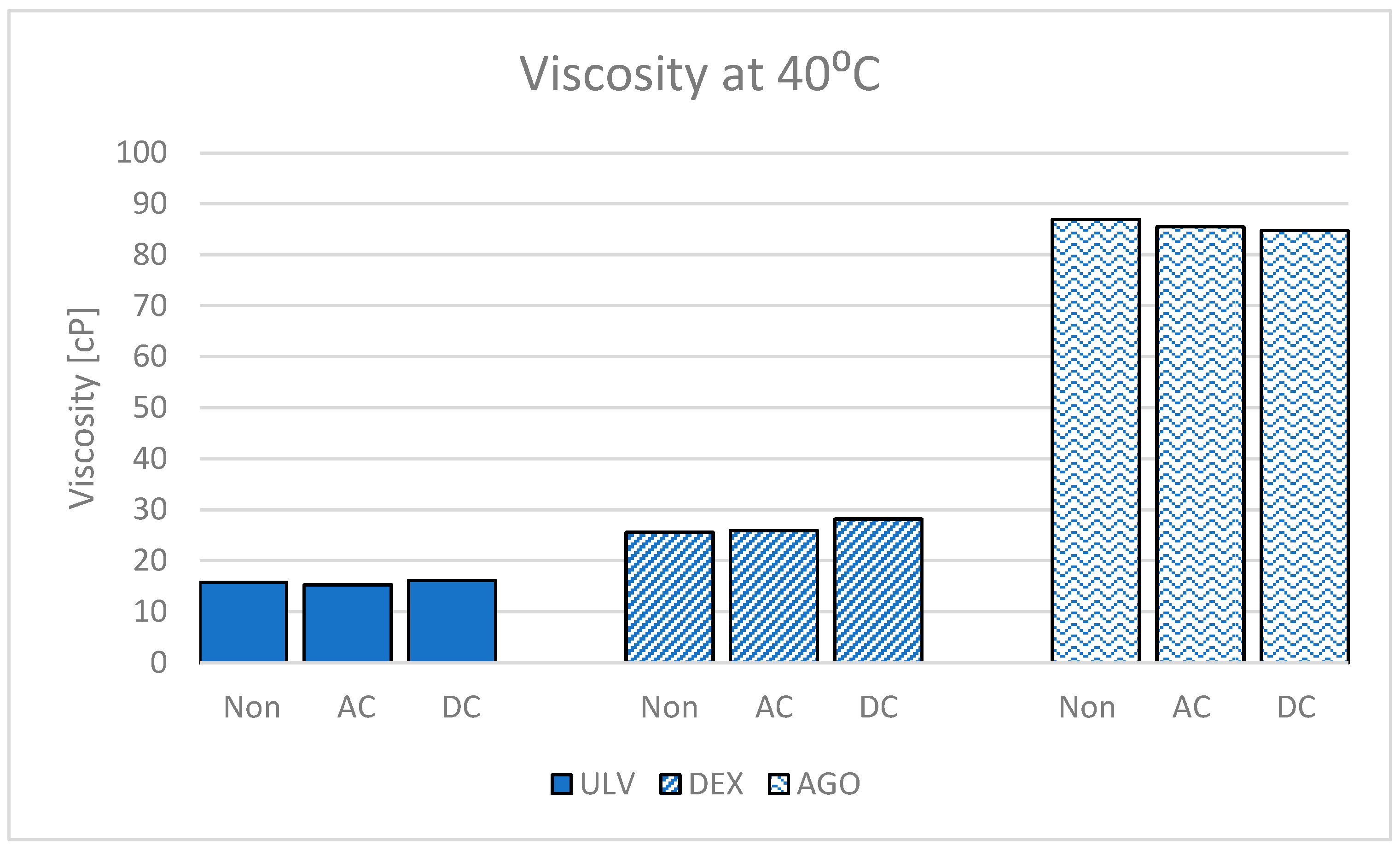
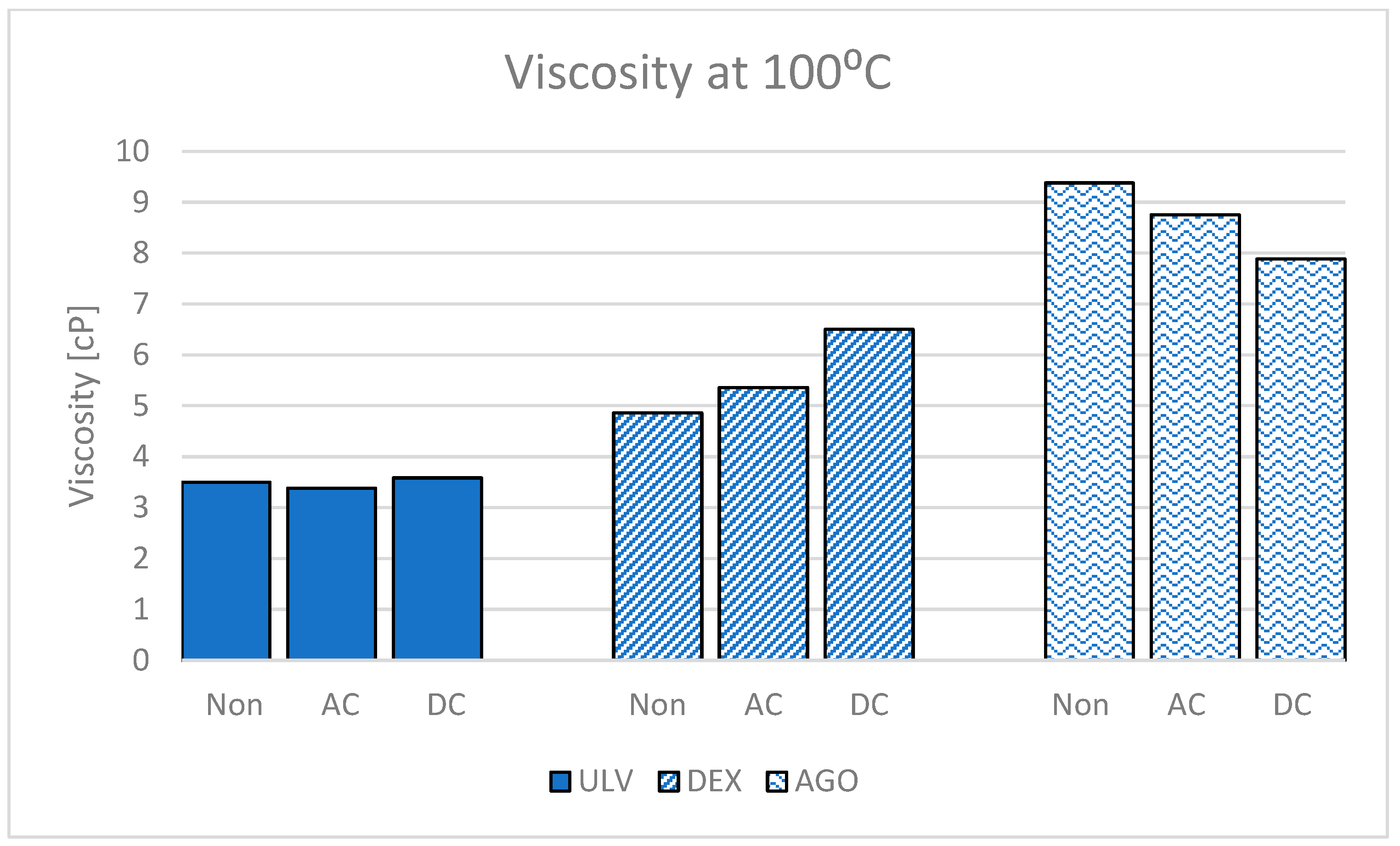
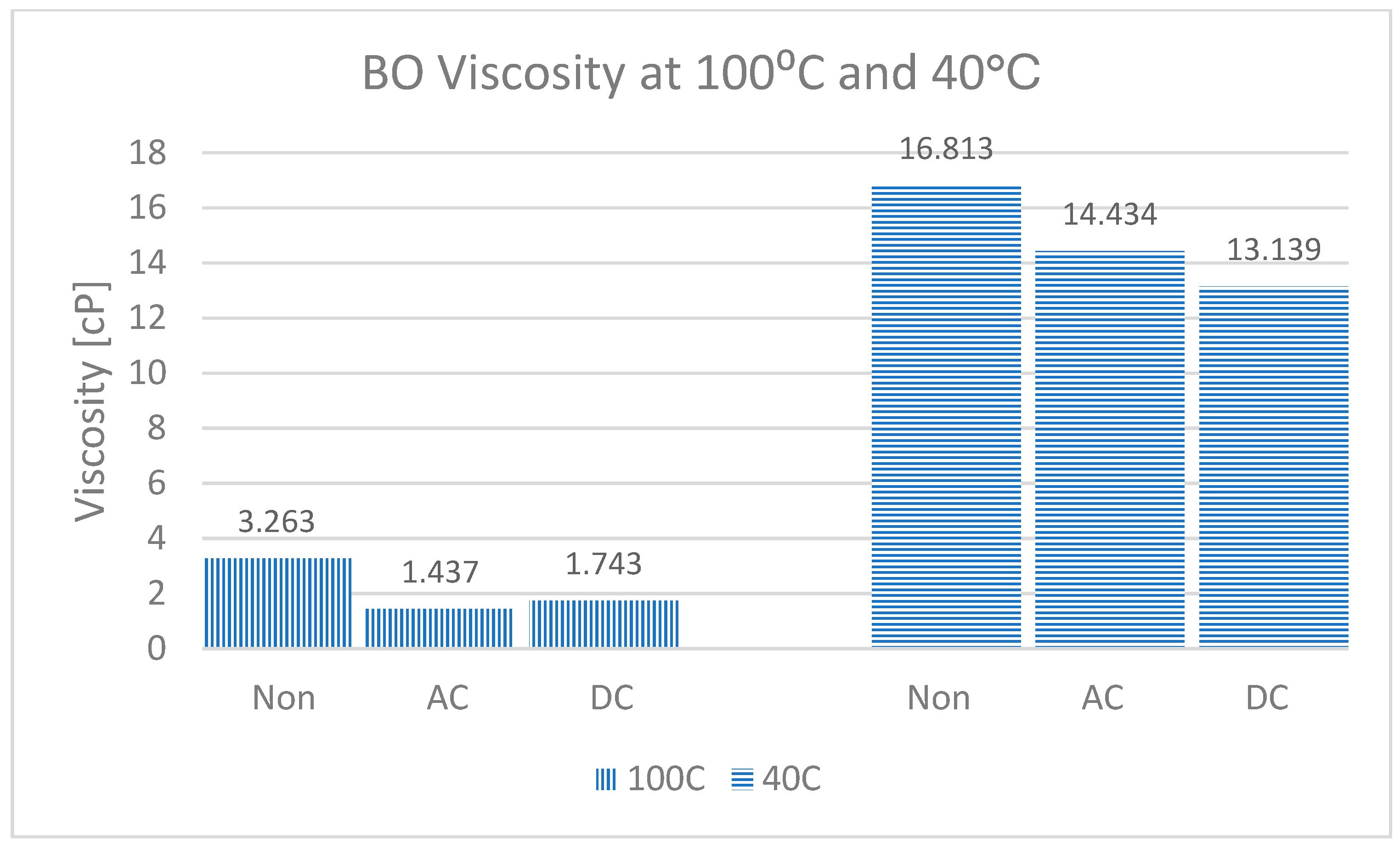
4.2. Lubricant Viscosity
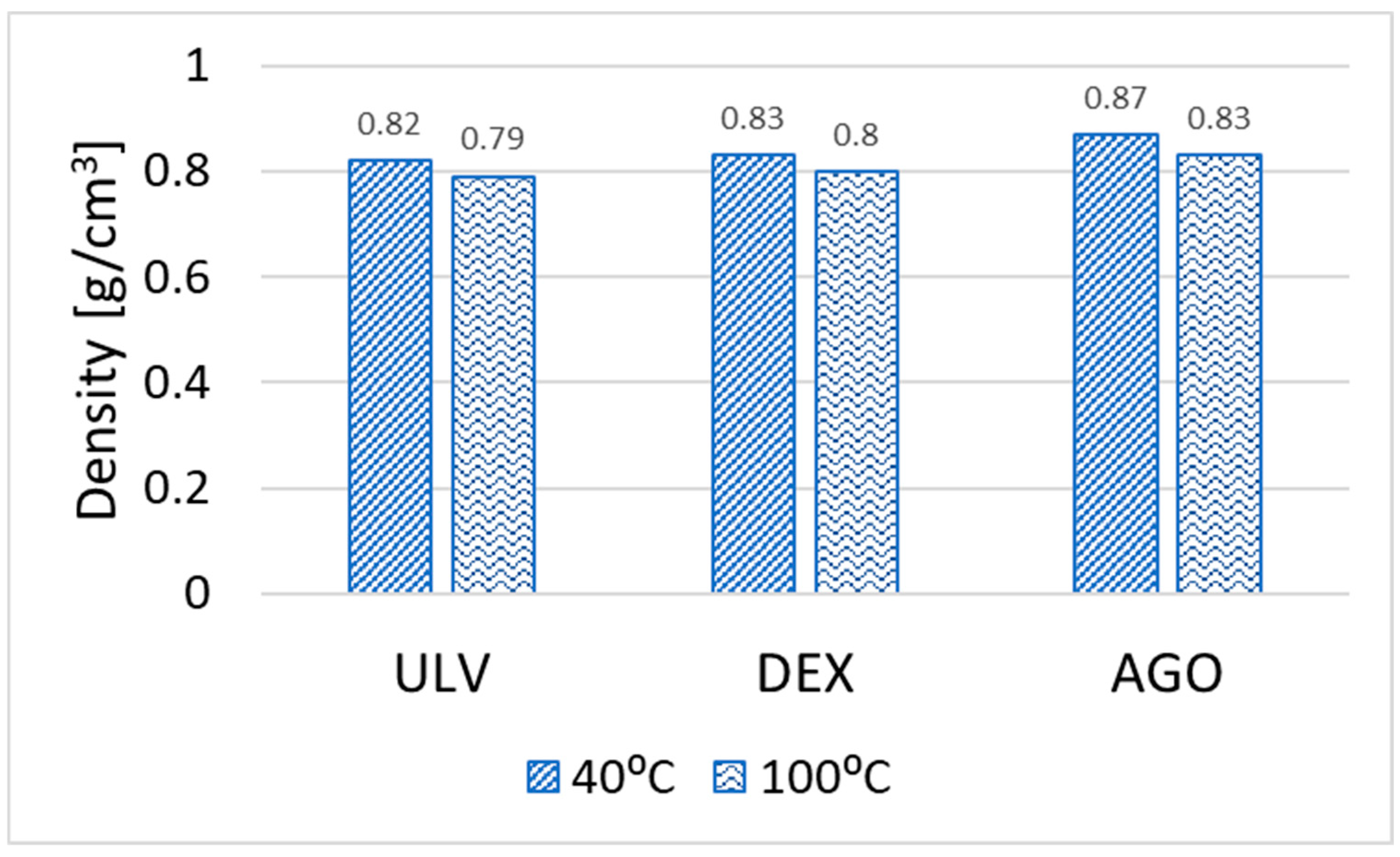
4.3. Lubricant Density
4.4. Stribeck Curves
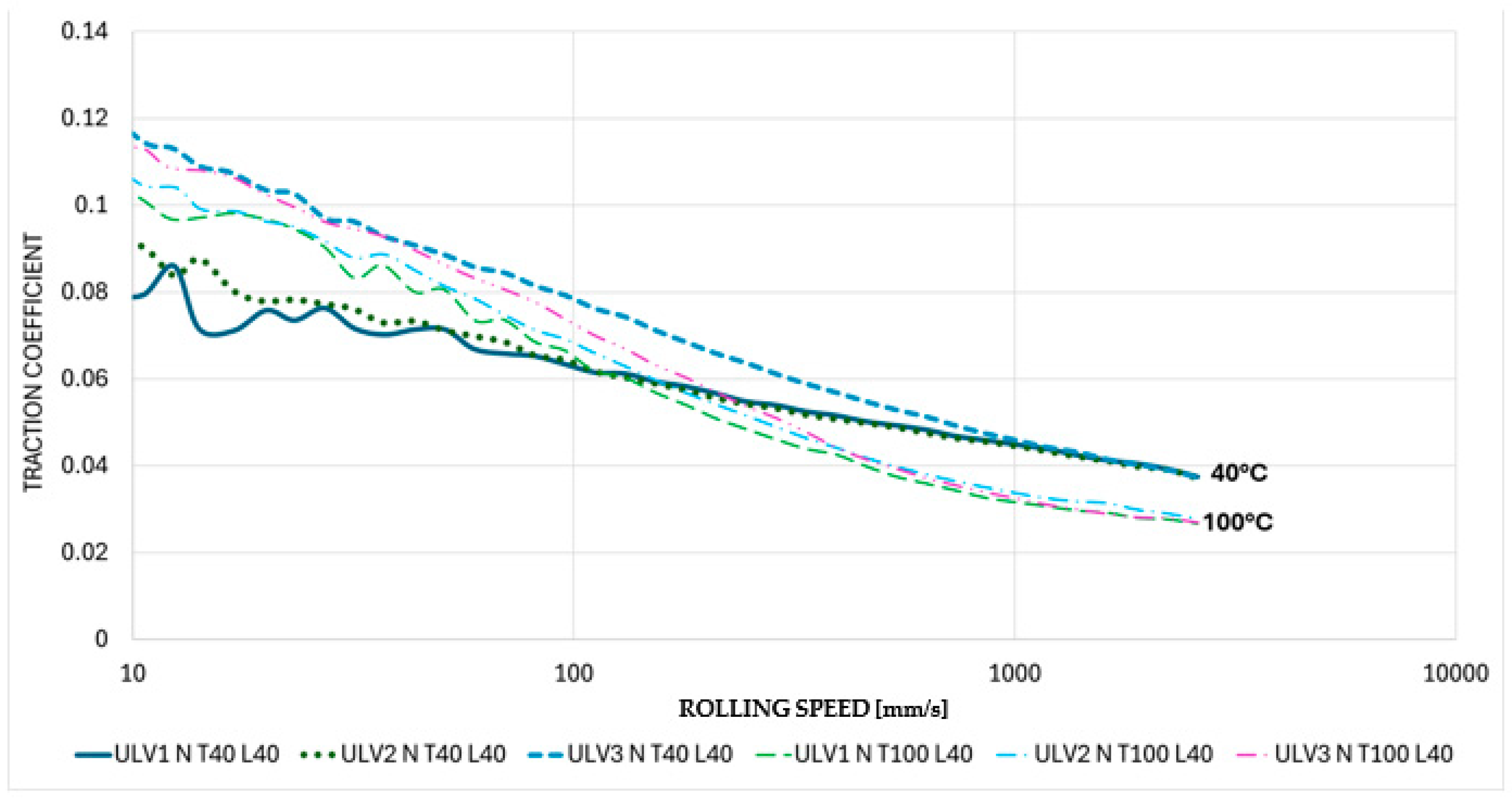
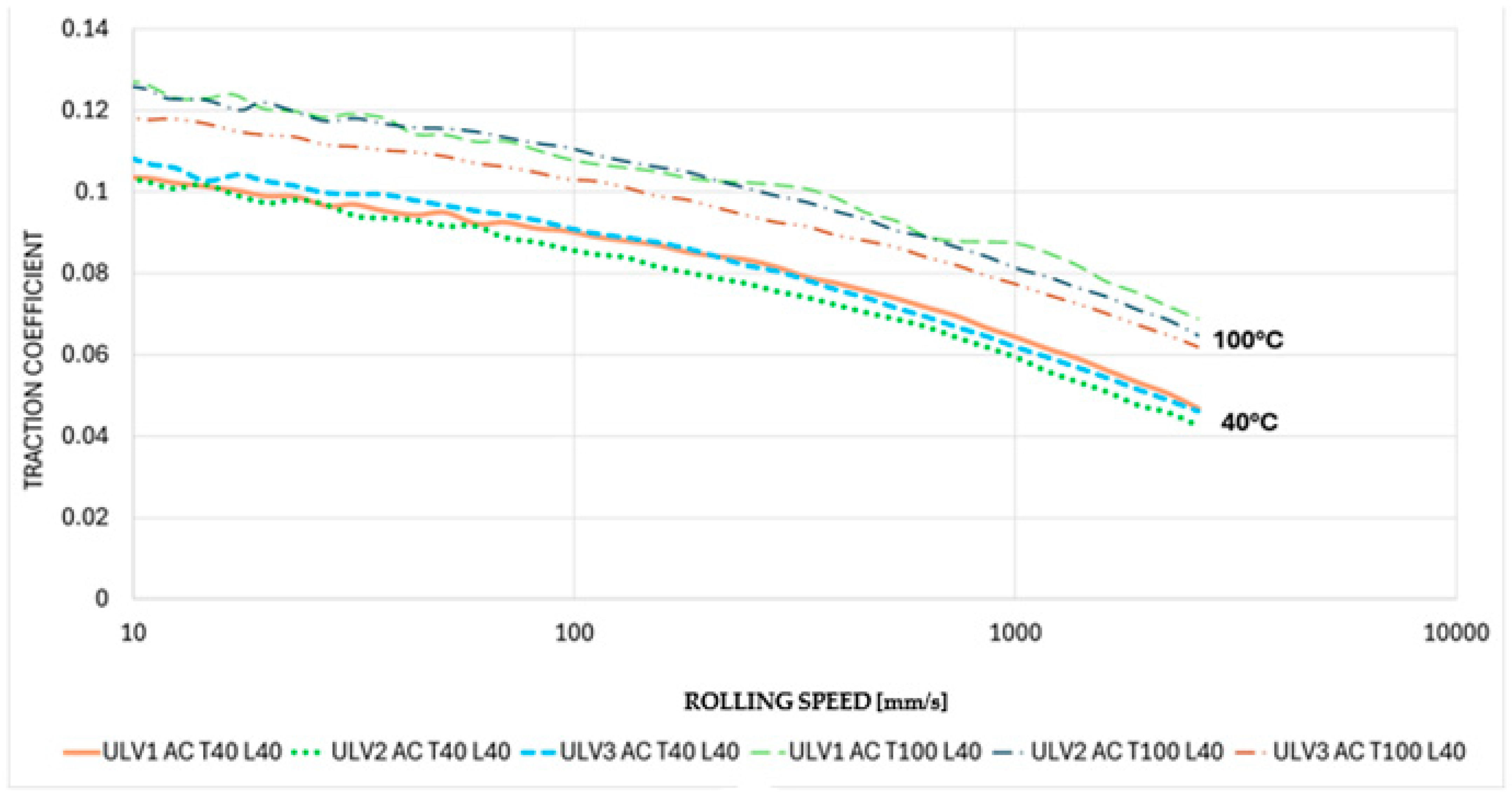
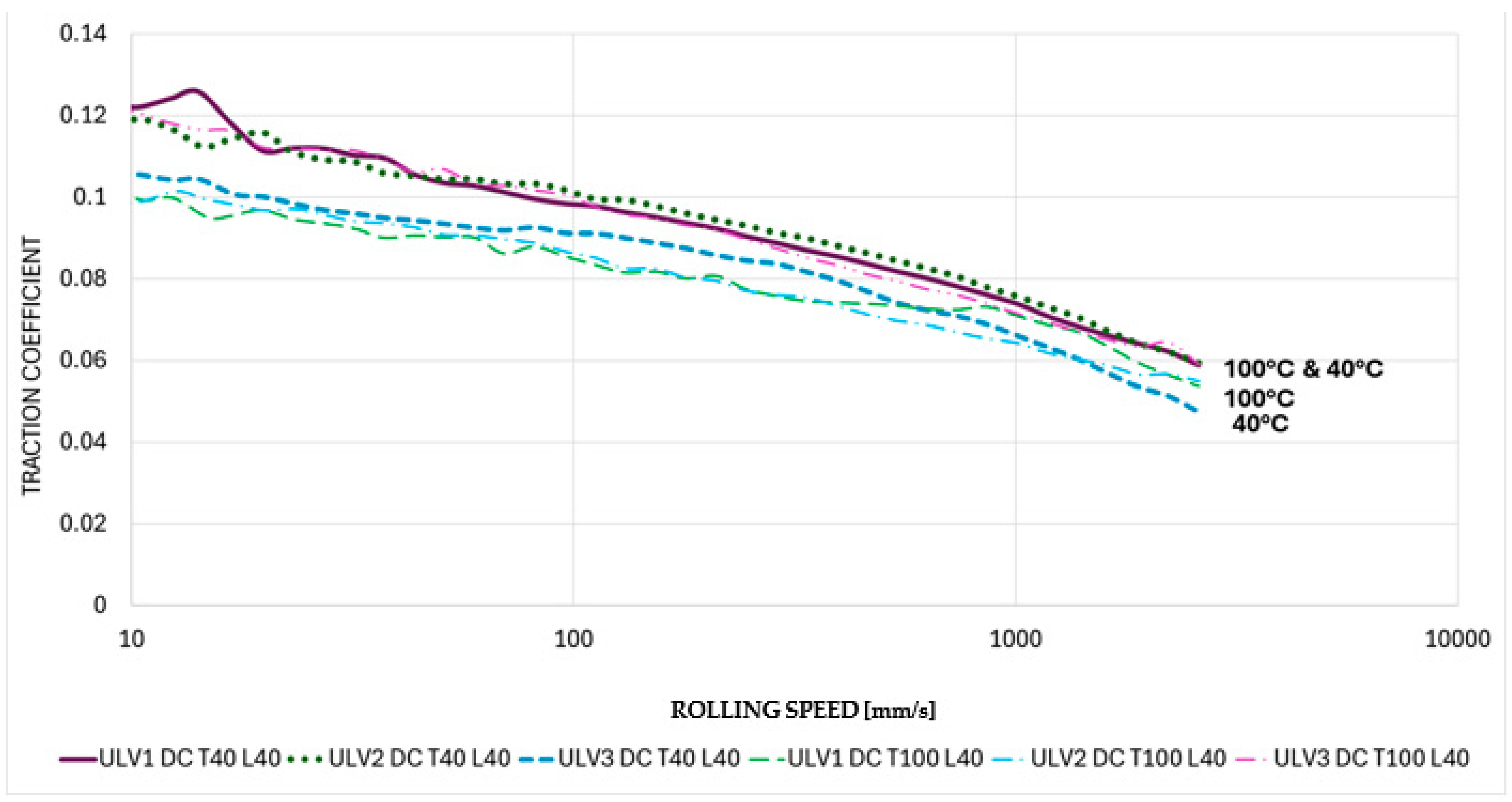
4.4.1. MERCON ULV Fluid (ULV)
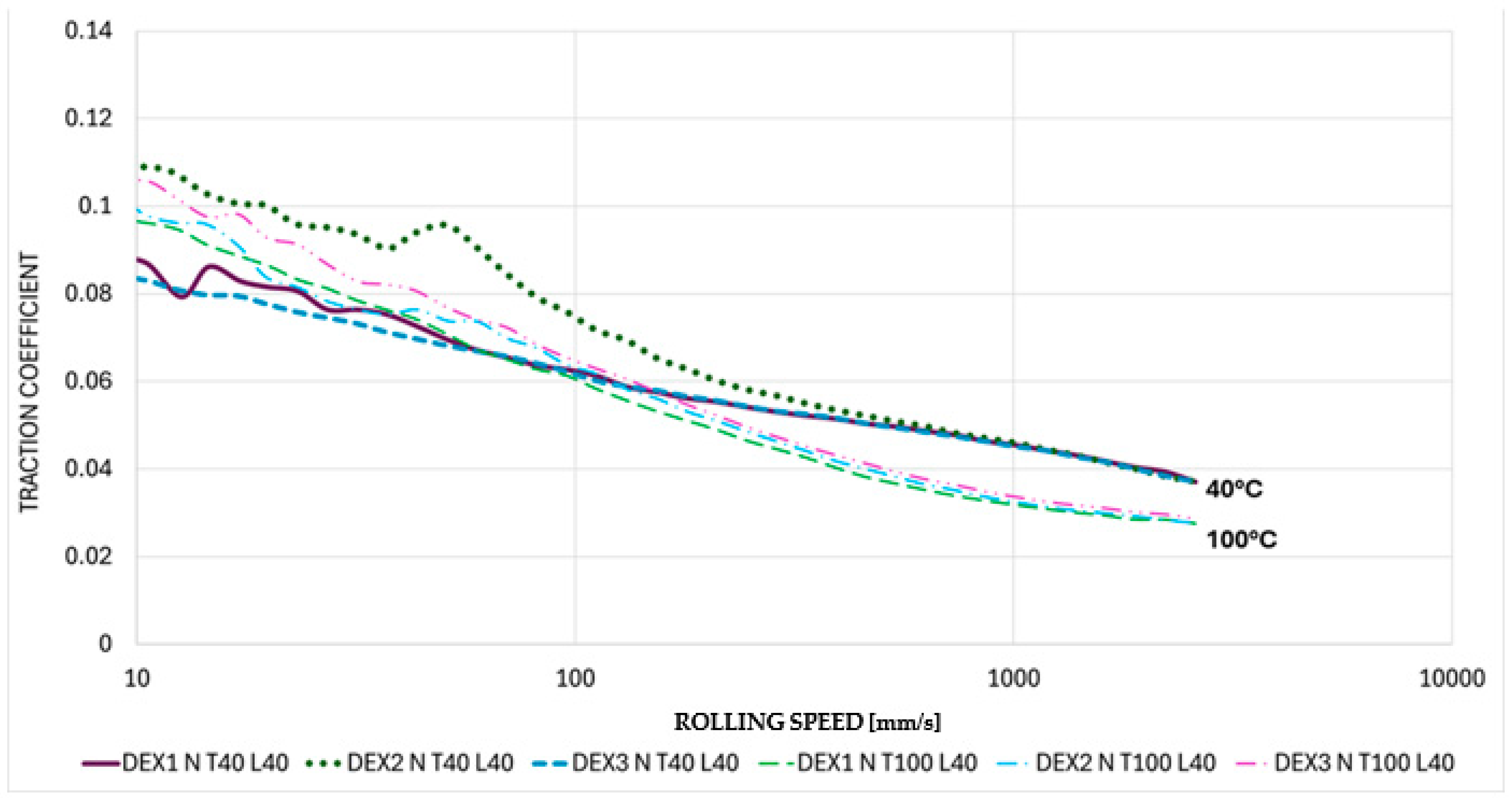
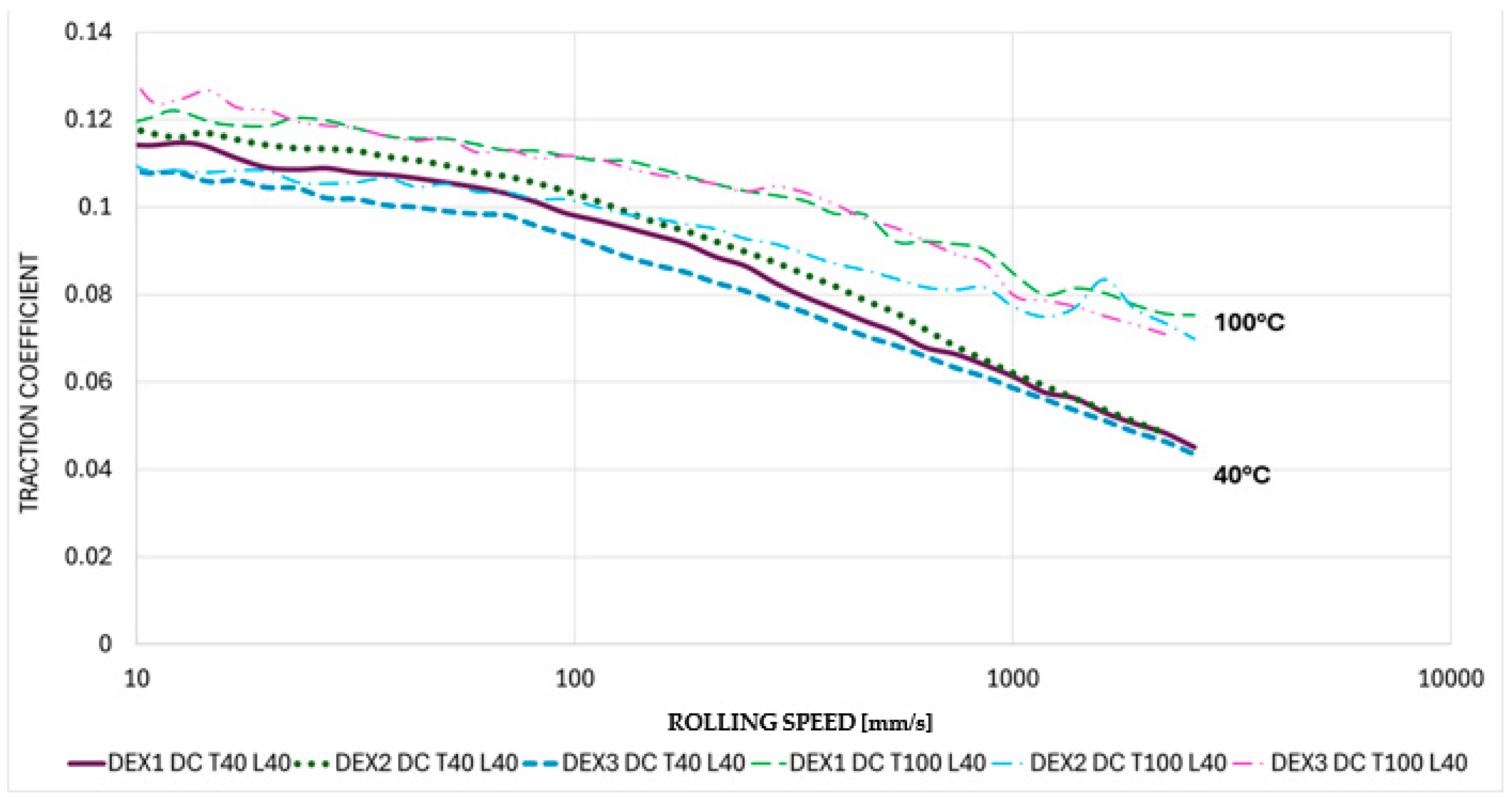
4.4.2. DEXRON VI Fluid (DEX)

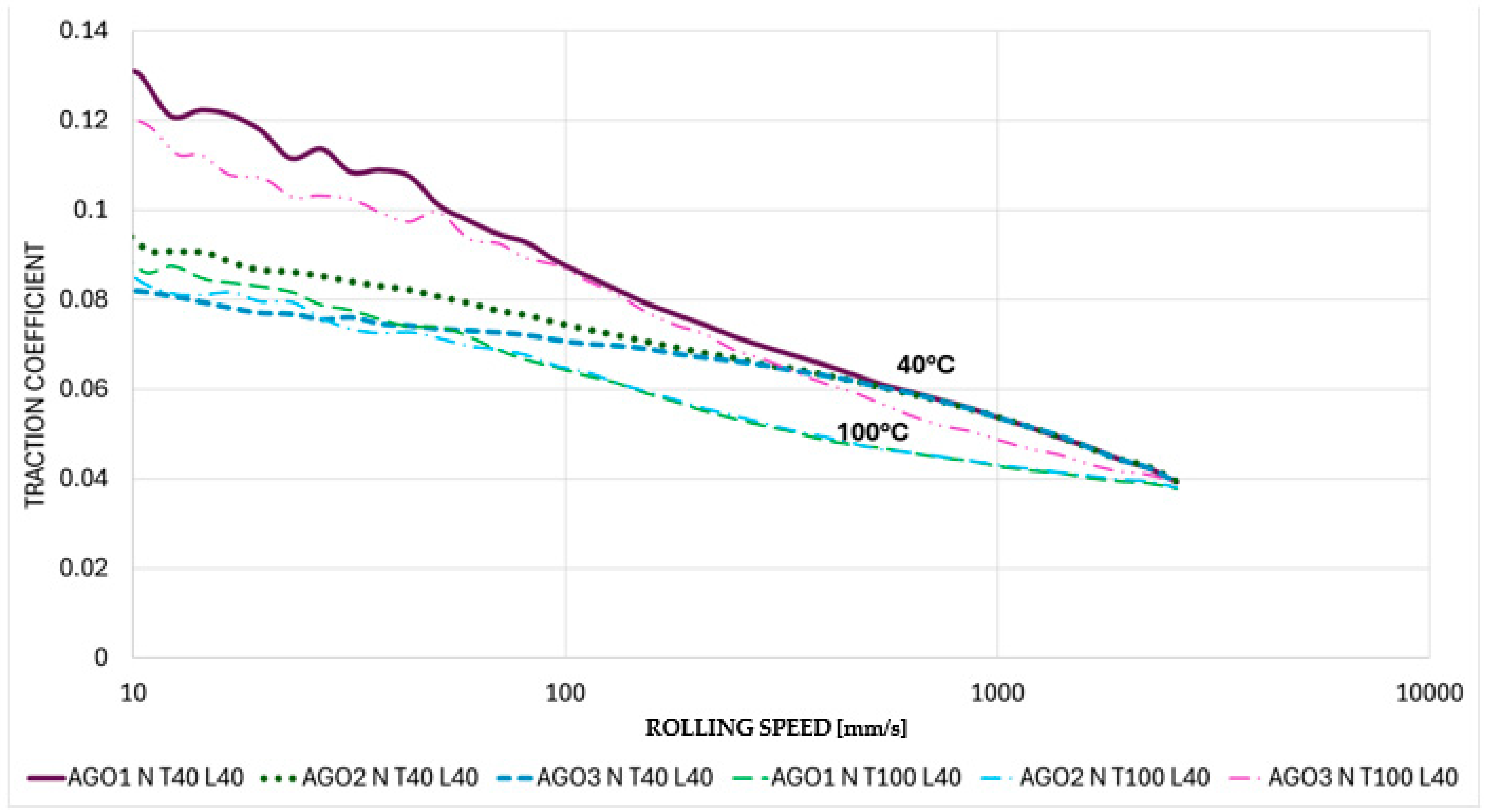
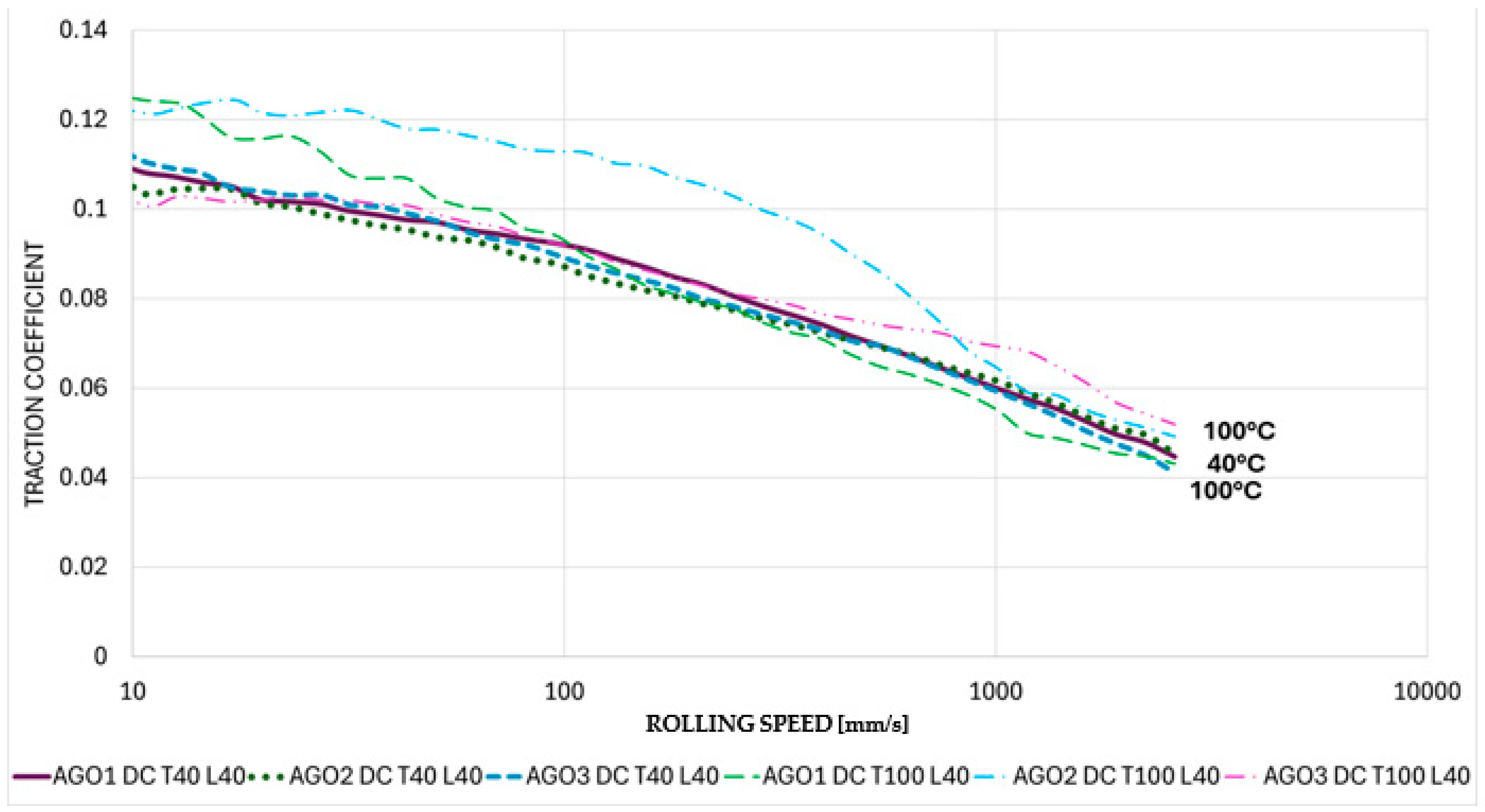
4.4.3. Automatic Gear Oil (AGO)
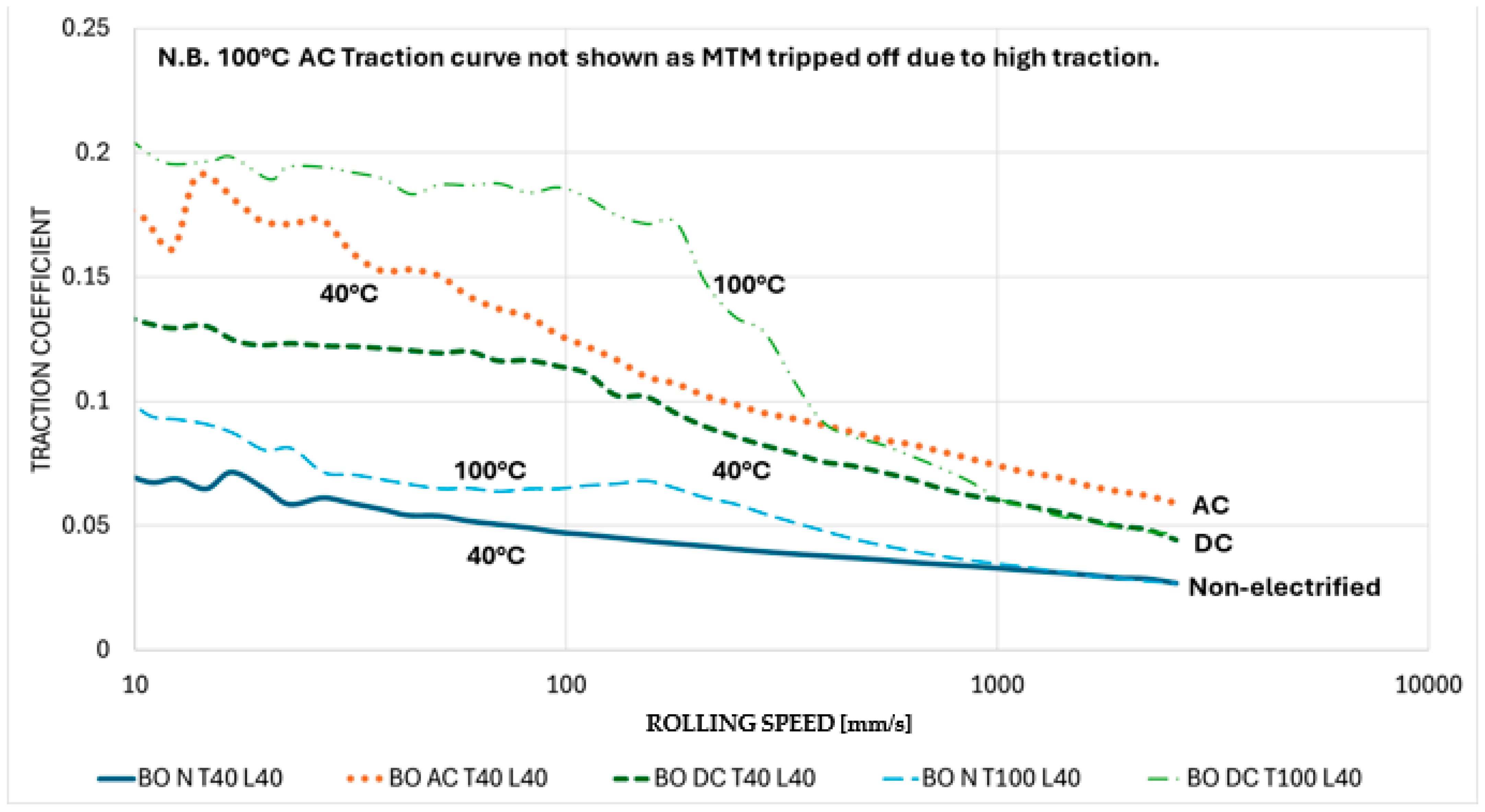
4.4.4. YUBASE 4+ Base Oil (BO)
4.5. Stribeck Discussion
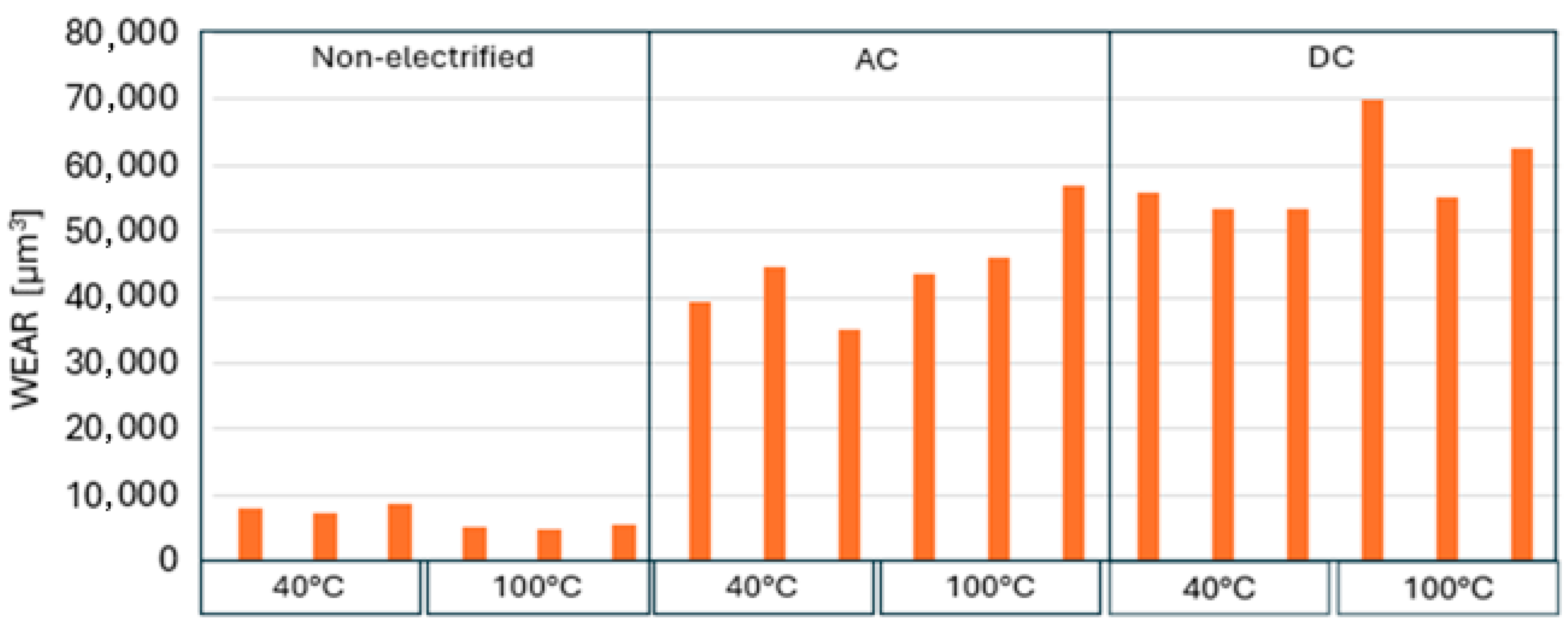
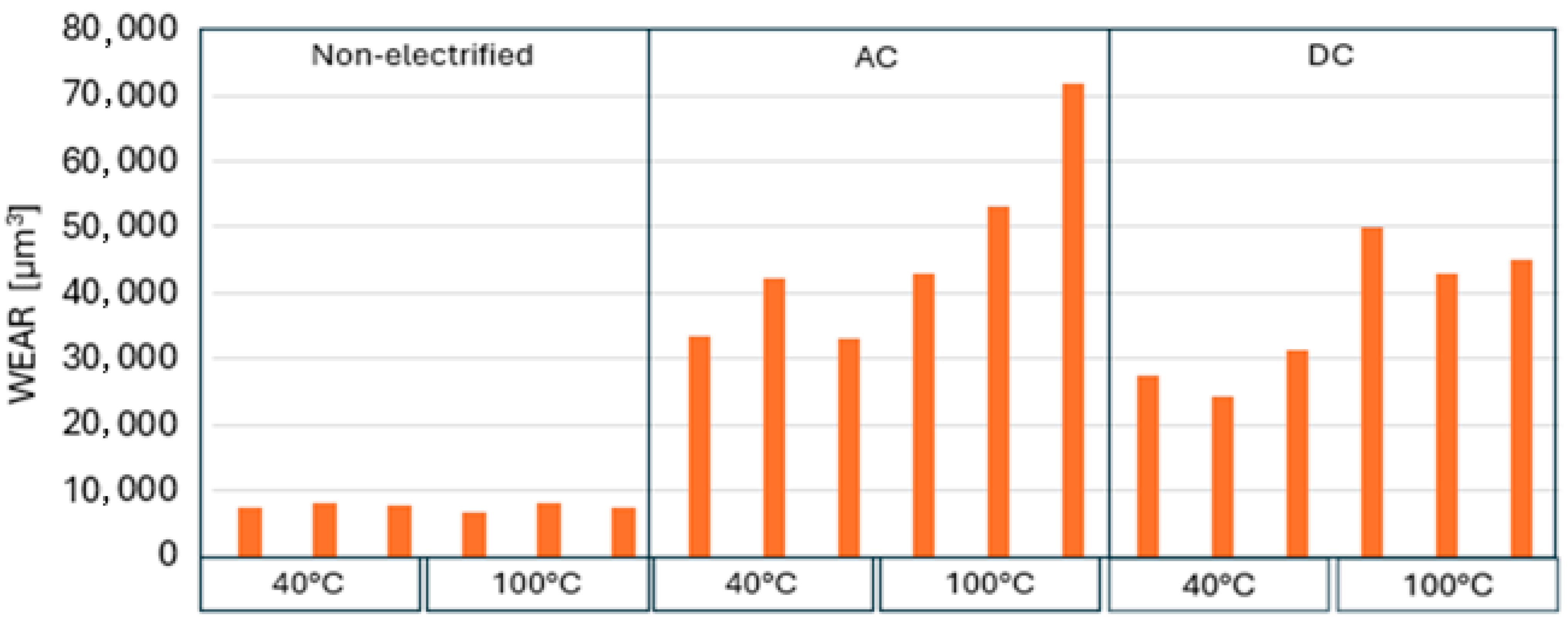
4.6. Wear Results and Discussion
5. Conclusions
6. Patents
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- He, F.; Xie, G.; Luo, J. Electrical bearing failures in electric vehicles. Friction 2020, 8, 4–28. [Google Scholar] [CrossRef]
- Jacobson, B. The Stribeck memorial lecture. Tribol. Int. 2003, 36, 781–789. [Google Scholar] [CrossRef]
- Canter, N. Tribology and Lubrication for E-Mobility: Findings from the Inaugural STLE Conference on Electric Vehicles; Society of Tribologists and Lubrication Engineers: Park Ridge, IL, USA, 2022. [Google Scholar]
- Canter, N. Tribology and Lubrication for E-Mobility: Findings from the 2nd STLE Conference on Electric Vehicles; Society of Tribologists and Lubrication Engineers: Park Ridge, IL, USA, 2023. [Google Scholar]
- Canter, N. Tribology and Lubrication for E-Mobility: Findings from the 3rd STLE Conference on Electric Vehicles; Society of Tribologists and Lubrication Engineers: Park Ridge, IL, USA, 2024. [Google Scholar]
- Lee, P.M.; Sanchez, C.; Frazier, C.; Velasquez, A.; Kostan, T. Tribological evaluation of electric vehicle driveline lubricants in an electrified environment. Front. Mech. Eng. 2023, 9, 1215352. [Google Scholar] [CrossRef]
- Arole, K.; Chen, Y.; Delgado, A.; Hubbard, J.; Liang, H. Urea-ZrP Nanoparticle-enabled Electro-responsivity. J. Mol. Liq. 2022, 363, 119803. [Google Scholar] [CrossRef]
- Chen, Y.; Renner, P.; Liang, H. Using Electrochemical Impendence to Characterize Thermal Performance of Working Lubricants. Surf. Topogr. Metrol. Prop. 2021, 9, 035035. [Google Scholar] [CrossRef]
- Chen, Y.; Liang, H. Tribological Evaluation of Electrical Resistance of Lubricated Contacts. ASME J. Trib. 2020, 142, 114502. [Google Scholar] [CrossRef]
- Deshpande, P.; Yelkarasi, C.; Lee, S.; Farfan-Cabrera, L.I.; Erdemir, A. Electrotribochemical formation of abrasive nano-carbon particles under electrified conditions on lubricated sliding contacts. Carbon 2024, 228, 119425. [Google Scholar] [CrossRef]
- Cao-Romero-Gallegos, J.A.; Farfan-Cabrera, L.I.; Erdemir, A.; Pascual-Francisco, J.B. Lubricated sliding wear of gear material under electrification—A new approach to understanding of the influence of shift currents in the wear of EV transmissions. Wear 2023, 523, 204782. [Google Scholar] [CrossRef]
- Cao-Romero-Gallegos, J.A.; Taghizadeh, S.; Aguilar-Rosas, O.A.; Dwyer-Joyce, R.S.; Farfan-Cabrera, L.I. The effect of electrical current on lubricant film thickness in boundary and mixed lubrication contacts measured with ultrasound. Friction 2024, 12, 1882–1896. [Google Scholar] [CrossRef]
- Demas, N.G.; Lorenzo-Martin, C.; Luna, R.; Erck, R.A.; Greco, A.C. The Effect of Current and Lambda on White-Etch-Crack Failures. Tribol. Int. 2023, 189, 108951. [Google Scholar] [CrossRef]
- Gould, B.; Demas, N.; Erck, R.; Lorenzo-Martin, M.C.; Ajayi, O.; Greco, A.C. The Effect of Electrical Current on Premature Failures and Microstructural Degradation in Bearing Steel. Int. J. Fatigue 2021, 145, 106078. [Google Scholar] [CrossRef]
- Hadden, T.; Jiang, J.W.; Bilgin, B.; Yang, Y.; Sathyan, A.; Dadkhah, H. A review of shaft voltages and bearing currents in EV and HEV motors. In Proceedings of the IECON 2016-42nd Annual Conference of the IEEE Industrial Electronics Society, Florence, Italy, 23–26 October 2016; pp. 1578–1583. [Google Scholar]
- Ma, J.; Xue, Y.; Han, Q.; Li, X.; Yu, C. Motor bearing damage induced by bearing current: A Review. Machines 2022, 10, 1167. [Google Scholar] [CrossRef]
- Tawfiq, K.B.; Gulec, M.; Sergeant, P. Bearing current and shaft voltage in electric machines: A comprehensive research review. Machines 2023, 11, 550. [Google Scholar] [CrossRef]
- Somani, A.; Gupta, R.K.; Mohapatra, K.K.; Mohan, N. On the causes of circulating currents in PWM drives with open-end winding AC machines. IEEE Trans. Ind. Electron. 2012, 60, 3670–3678. [Google Scholar] [CrossRef]
- Tischmacher, H.; Gattermann, S.; Kriese, M.; Wittek, E. Bearing wear caused by converter-induced bearing currents. In Proceedings of the IECON 36th Annual Conference on IEEE Industrial Electronics Society, Glendale, AZ, USA, 7–10 November 2010; pp. 784–791. [Google Scholar]
- Evo, M.T.; Alzamora, A.M.; Zaparoli, I.O.; de Paula, H. Inverter-Induced bearing currents: A thorough study of the cause-and-effect chains. Proc. IEEE Ind. Appl. Mag. 2022, 29, 57–66. [Google Scholar] [CrossRef]
- Huan, J.; Li, S.; Xia, Z.; Wang, Y.; Wang, W.; Shi, G. Experimental study on electric corrosion damage of bearing and solution. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2022, 236, 10349–10358. [Google Scholar] [CrossRef]
- Harder, A.; Zaiat, A.; Becker-Dombrowsky, F.M.; Puchtler, S.; Kirchner, E. Investigation of the voltage-induced damage progression on the raceway surfaces of thrust ball bearings. Machines 2022, 10, 832. [Google Scholar] [CrossRef]
- Suzumura, J. Prevention of electrical pitting on rolling bearings by electrically conductive grease. Q. Rep. RTRI 2016, 57, 42–47. [Google Scholar] [CrossRef] [PubMed]
- Hudson, C.; Smith, I.; Wileman, C. EV Fluid Performance Investigation (IONIQ5), Southwest Research Institute Internal Research and Development Report; 2025. [Google Scholar]
- Hudson, C.; Smith, I.; Wileman, C. Development of Hybrid Drivetrain Fluids and Hardware Testing (RAV4), Southwest Research Institute Internal Research and Development Report; 2024. [Google Scholar]
- Sanchez, C.; Lee, P.M.; Hamer, J.C.; Welham, T.W.G.; Wainwright, B.P.; Smeeth, M. Apparatus and Method to Evaluate the Effect of Electrical Potential Between Moving Surfaces. U.S. Patent Application 18/665.830, 2024. [Google Scholar]
- Gangopadhyay, A.; Paputa Peck, M.C.; Simko, S.J. Wear control in a lubricated contact through externally applied electric current. Tribol. Trans. 2010, 45, 302–309. [Google Scholar] [CrossRef]
- Mahmoud, M.M.; Mohamed, M.K.; Ali, W.Y. Tribological behaviour of lubricated surfaces under application of electric current. Proc. Inst. Mech. Eng. Part J J. Eng. Tribol. 2009, 224, 73–79. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| TEST BALL | TEST DISK | |
|---|---|---|
| Material | AISI E-52100 steel | AISI E-52100 steel |
| Surface finish | <0.02 µm Ra Grade 10 to ISO 3290-1 | <0.02 µm Ra Surface finish is non-directional |
| Hardens measured to ASTM E92 | 800 HV ± 20 HV | 760 HV ± 20 HV |
| Dimensions | 19.05 mm diameter | 46 mm diameter, 6 mm thick |
| ELECTRIFICATION | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| None | Direct Current (DC) | Alternating Current (AC) | ||||||||
| LOAD (N) | LOAD (N) | LOAD (N) | ||||||||
| 5 | 40 | 75 | 5 | 40 | 75 | 5 | 40 | 75 | ||
| TEMPERATURE (°C) | 20 | ×1 | ×1 | ×1 | ×1 | ×1 | ×1 | ×1 | ×1 | ×1 |
| 40 | ×3 | ×3 | ×3 | ×3 | ×3 | ×3 | ×3 | ×3 | ×3 | |
| 80 | ×1 | ×1 | ×1 | ×1 | ×1 | ×1 | ×1 | ×1 | ×1 | |
| 100 | ×3 | ×3 | ×3 | ×3 | ×3 | ×3 | ×3 | ×3 | ×3 | |
| 120 | ×1 | ×1 | ×1 | ×1 | ×1 | ×1 | ×1 | ×1 | ×1 | |
| TOTAL TESTS | 27 | 27 | 27 | |||||||
| TOTAL | 81 | |||||||||
| TEMPERATURE (°C) | LOAD (N) | ELECTRIFICATION | FLUID | ||||
|---|---|---|---|---|---|---|---|
| 20 | T20 | 5 | L5 | None | N | MERCON® ULV | ULV |
| 40 | T40 | 40 | L40 | Direct Current | DC | DEXRON®-VI | DEX |
| 80 | T80 | 75 | L75 | Alternating Current | AC | Automatic Gear Oil | AGO |
| YUBASE 4+ | BO | ||||||
| 100 | T100 | Where more than one run was done at the same conditions, numbers 1, 2 and 3 will be placed after the oil to donate the run number. | |||||
| 120 | T120 | ||||||
| Example | Long Hand: MERCON® ULV run 3, Alternating Current at 100 °C and 75 NNotation: ULV3 AC T100 L75 | ||||||
| Temperature | 40 °C | 100 °C | |||
| Electrification | AC | DC | AC | DC | |
Lubricant | ULV | −3.1 | +2.3 | −3.4 | +2.4 |
| DEX | +2.1 | +10.3 | +10.2 | +33.7 | |
| AGO | −1.7 | −2.5 | −6.7 | −15.9 | |
| Lubricant | ULV | DEX | AGO | |
|---|---|---|---|---|
| Electrification | ||||
| None |  |  |  | |
| AC |  | 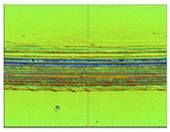 | 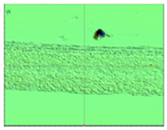 | |
| DC | 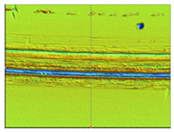 | 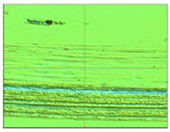 |  | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, P.; Sanchez, C.; Moneer, M.; Velasquez, A. Electrification of a Mini Traction Machine and Initial Test Results. Lubricants 2024, 12, 337. https://doi.org/10.3390/lubricants12100337
Lee P, Sanchez C, Moneer M, Velasquez A. Electrification of a Mini Traction Machine and Initial Test Results. Lubricants. 2024; 12(10):337. https://doi.org/10.3390/lubricants12100337
Chicago/Turabian StyleLee, Peter, Carlos Sanchez, Michael Moneer, and Andrew Velasquez. 2024. "Electrification of a Mini Traction Machine and Initial Test Results" Lubricants 12, no. 10: 337. https://doi.org/10.3390/lubricants12100337
APA StyleLee, P., Sanchez, C., Moneer, M., & Velasquez, A. (2024). Electrification of a Mini Traction Machine and Initial Test Results. Lubricants, 12(10), 337. https://doi.org/10.3390/lubricants12100337