Study on the Dynamic Characteristics of Gears Considering Surface Topography in a Mixed Lubrication State


Abstract
:1. Introduction
2. Gear Stiffness and Damping under Mixed Lubrication Consideration
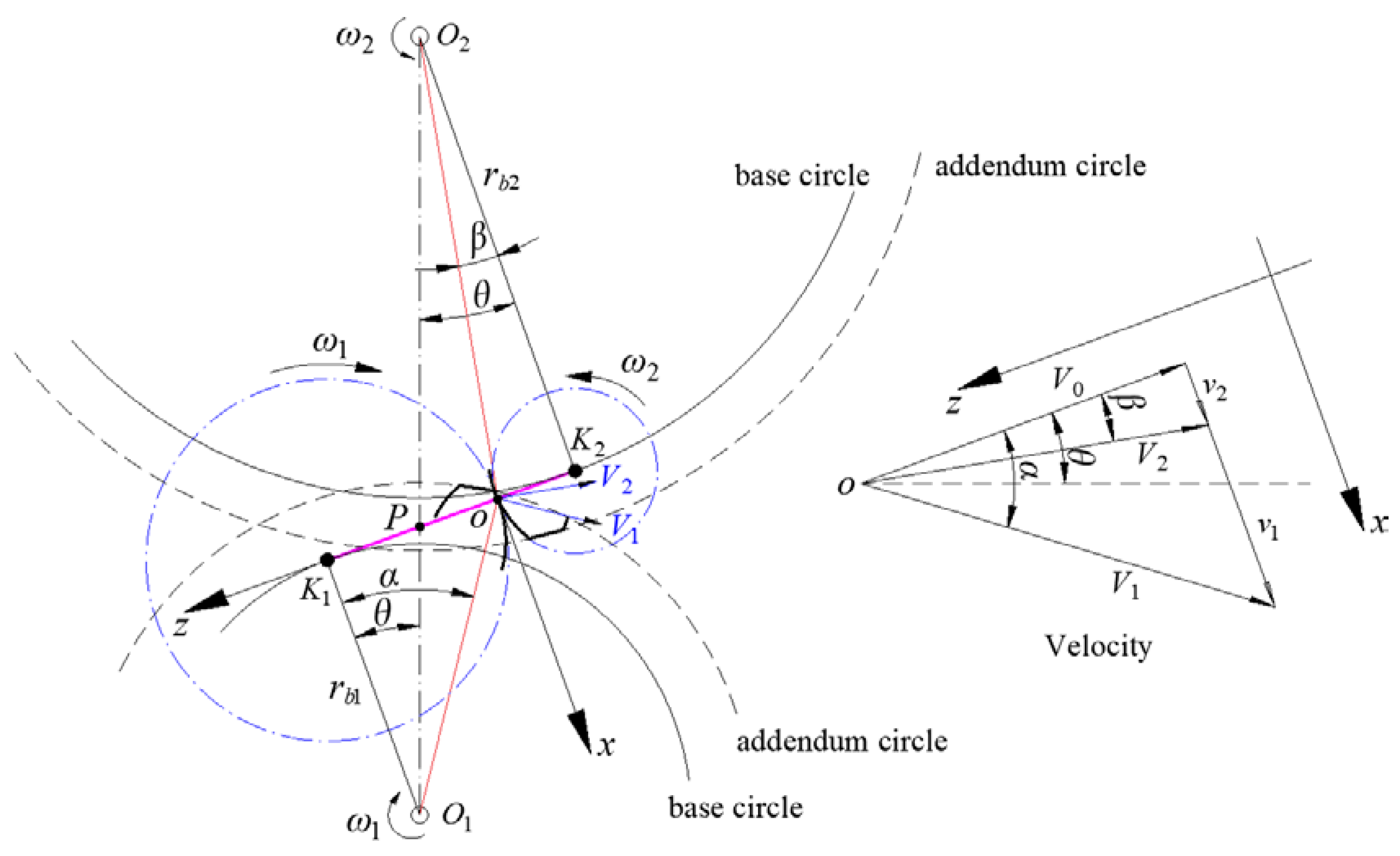
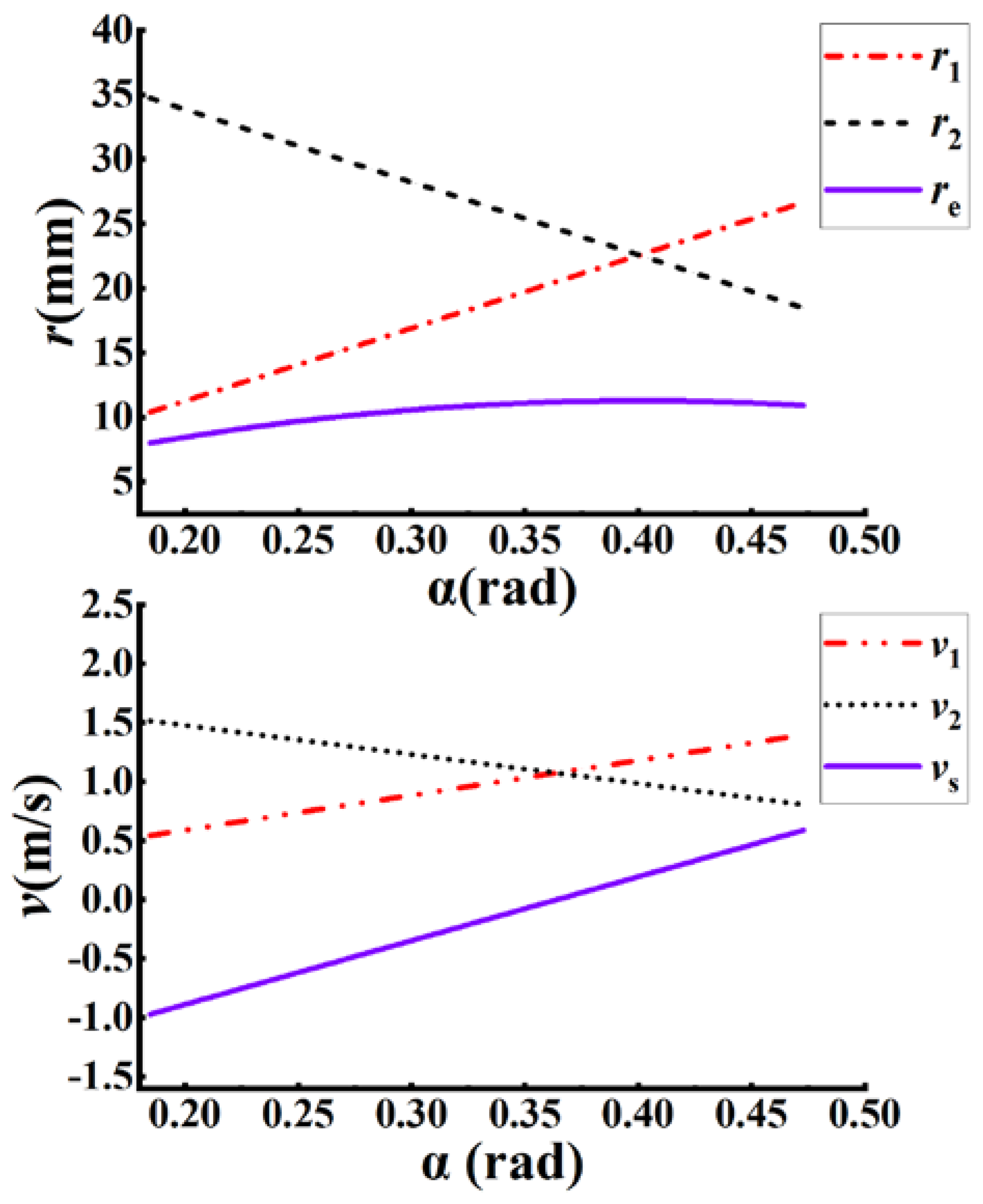
2.1. Gear Parameters and Lubrication Analysis
2.2. Calculation of Stiffness and Damping
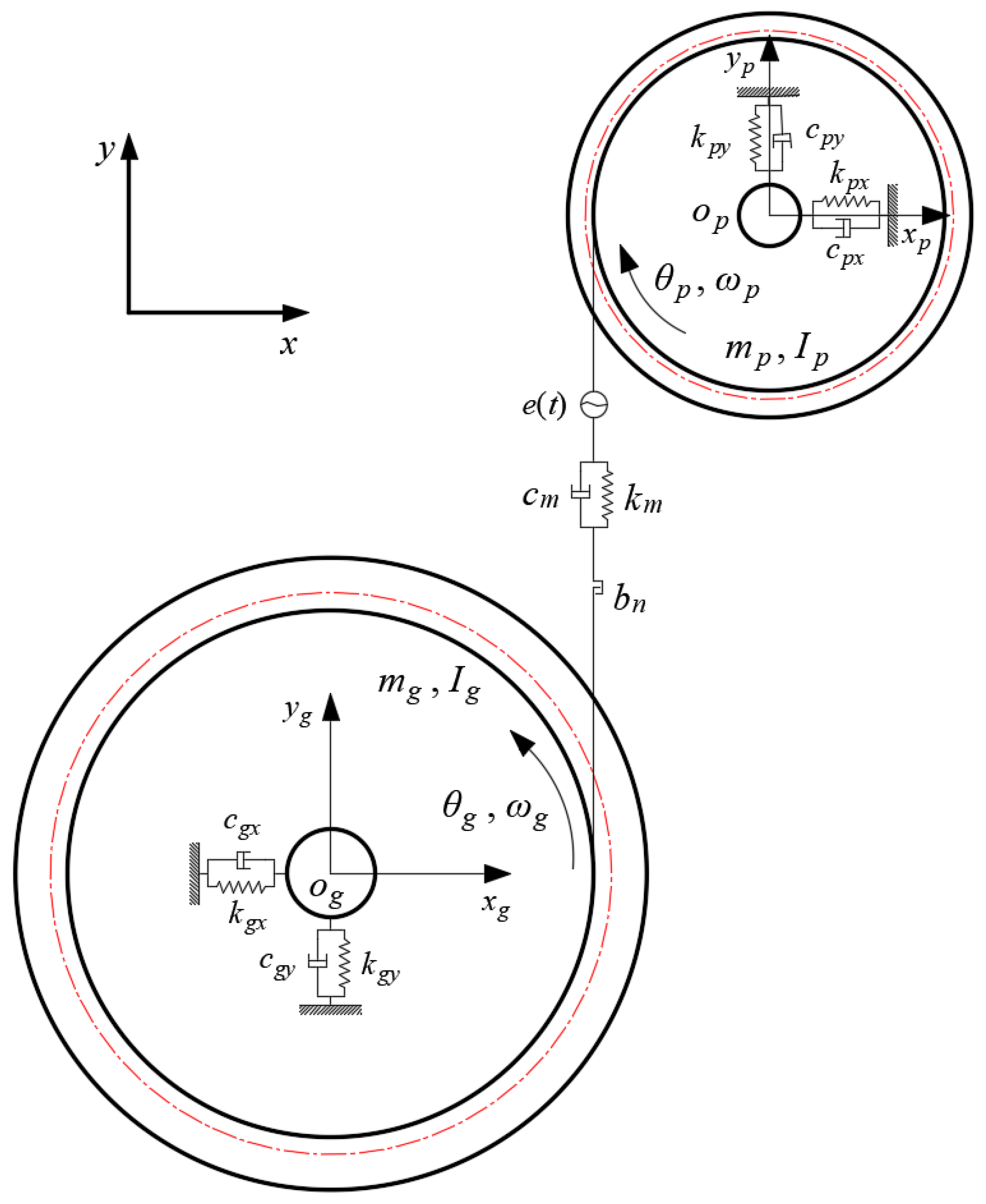
3. The Dynamics Model of Gears and Its Energy Dissipation
4. Simulation Results and Analysis
4.1. Gear Meshing Stiffness and Damping Analysis
4.2. Dynamic Characteristics and Energy Loss Analysis
5. Conclusions
- (1).
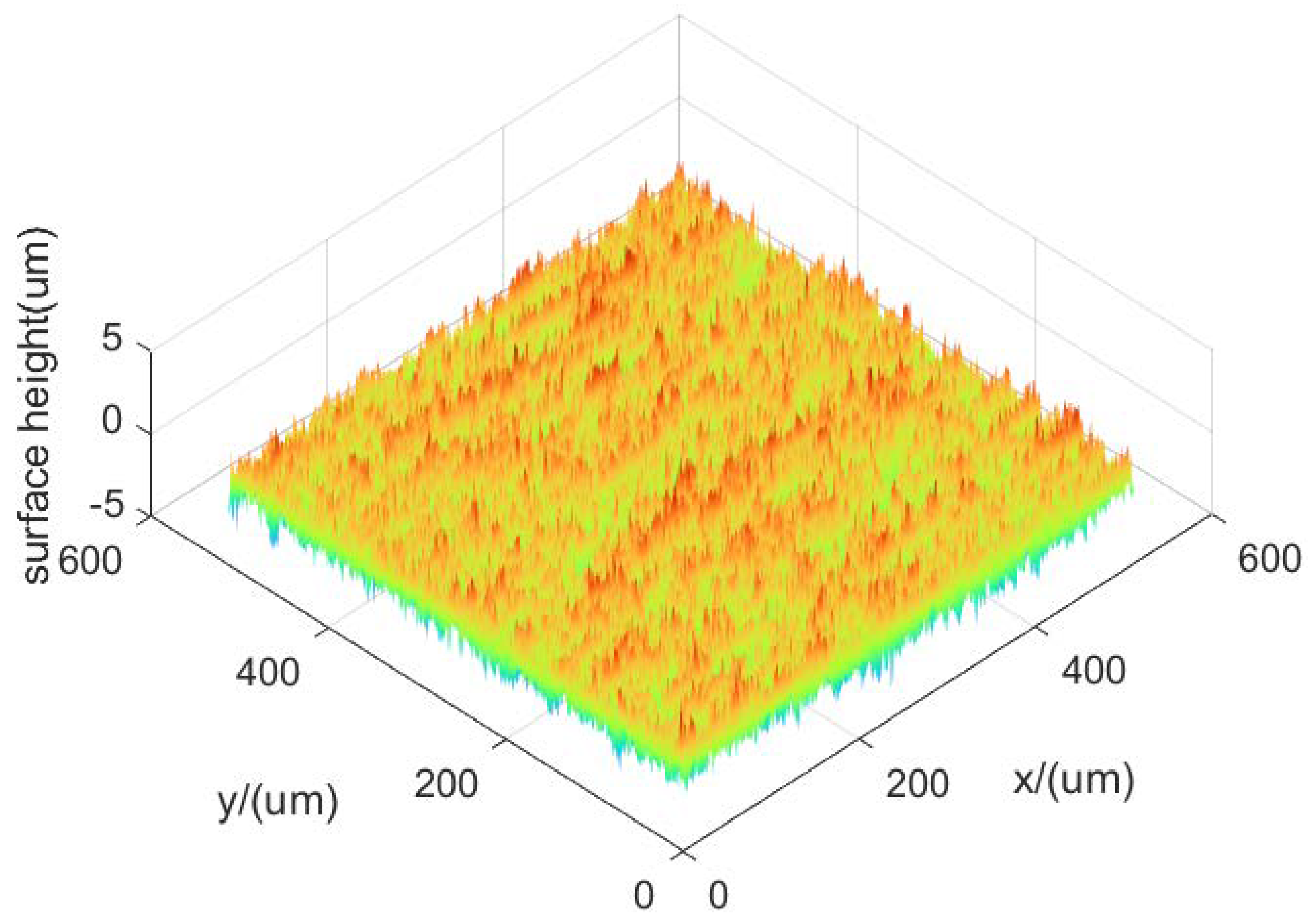
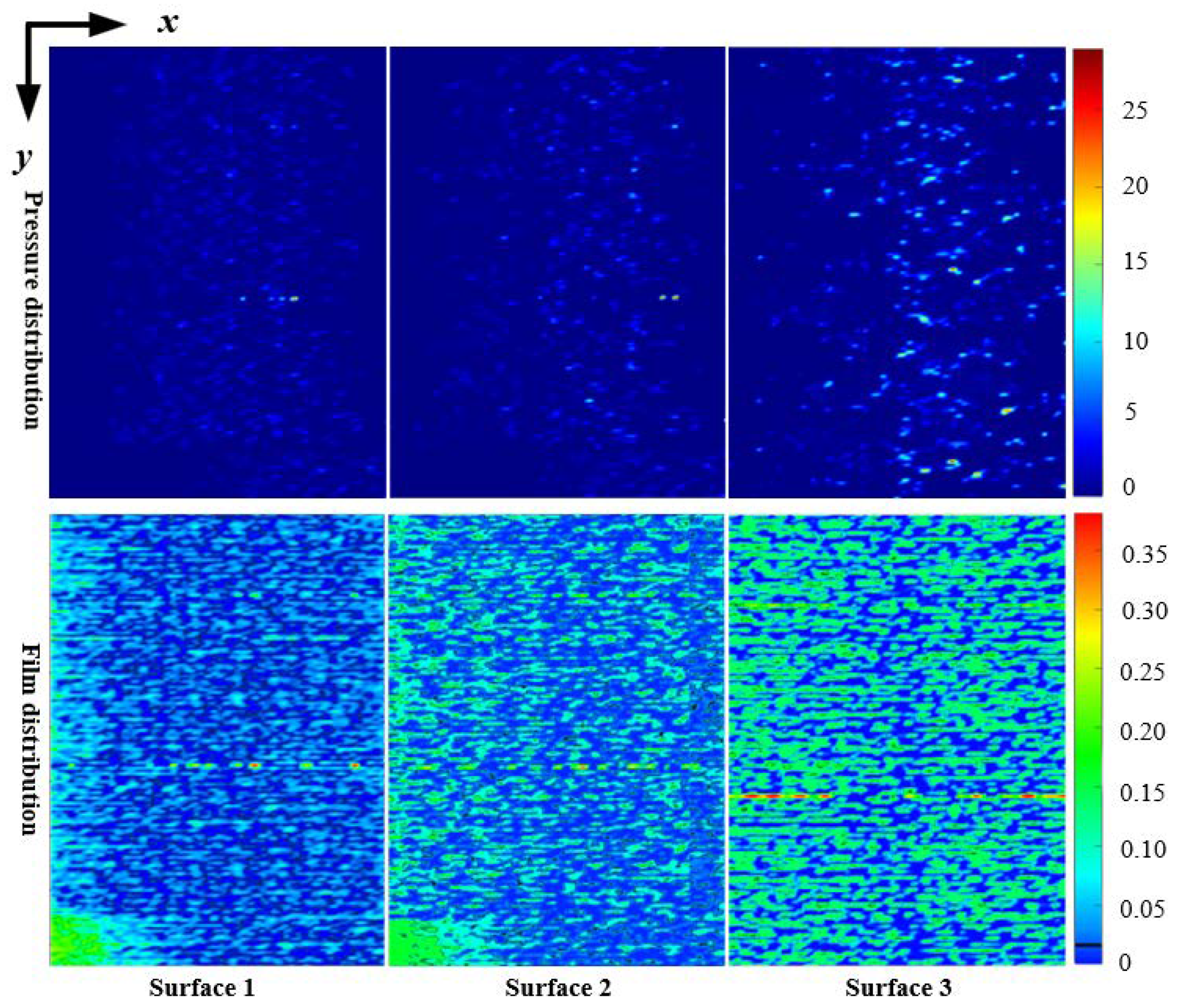
- Surface roughness has a direct impact on gear meshing stiffness and damping. As the roughness increases, both the contact stiffness and damping decrease;
- (2).
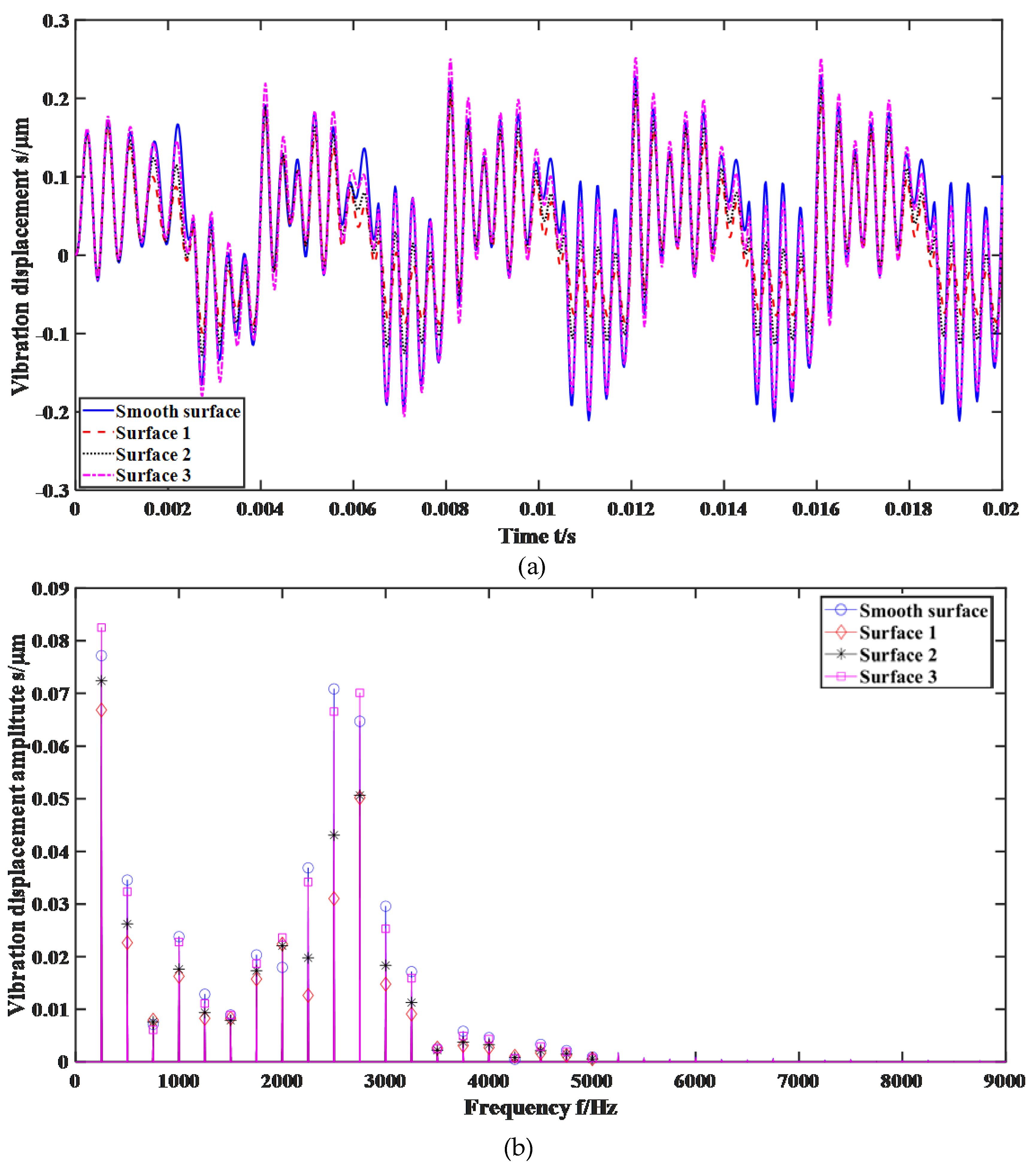
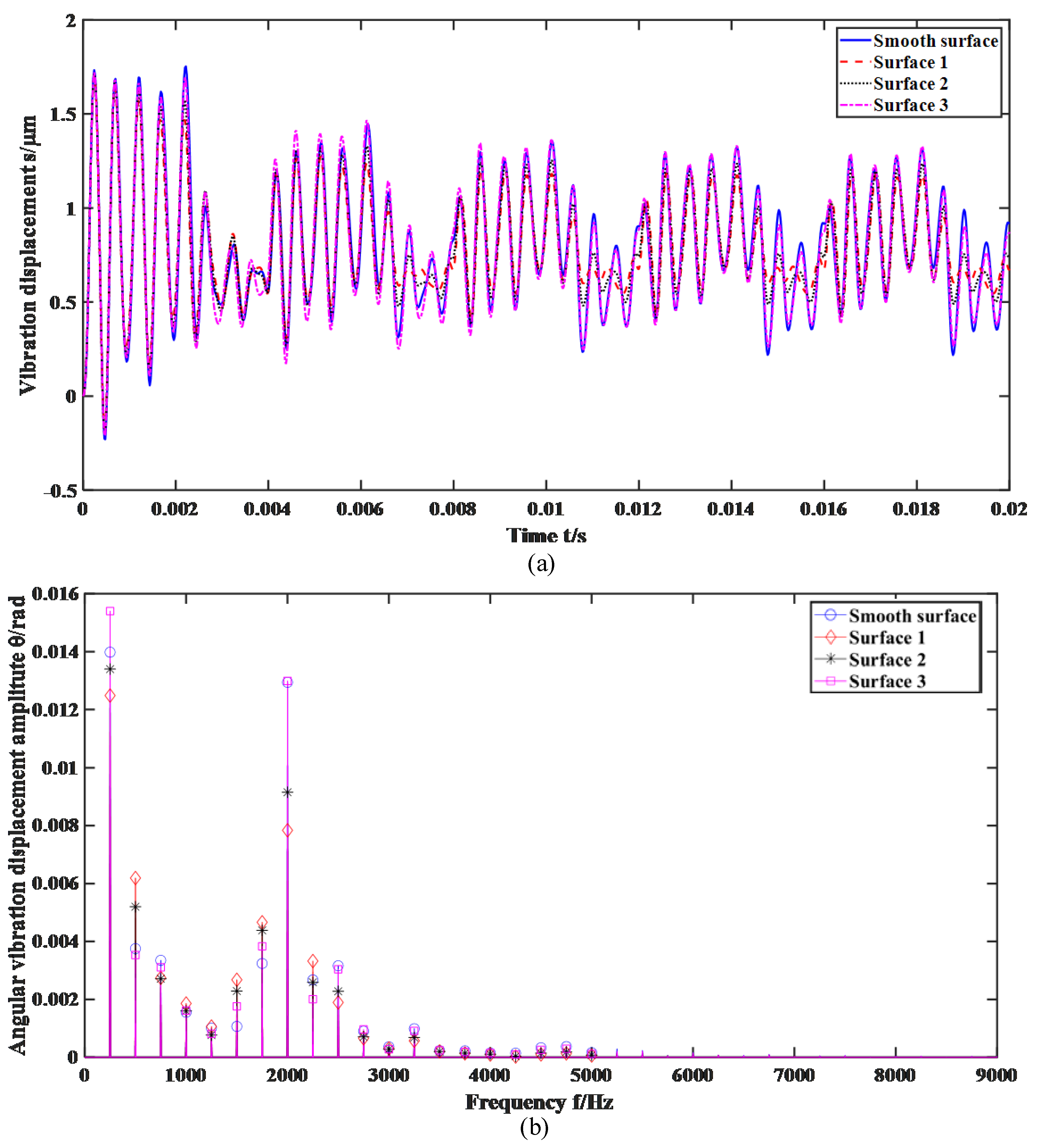
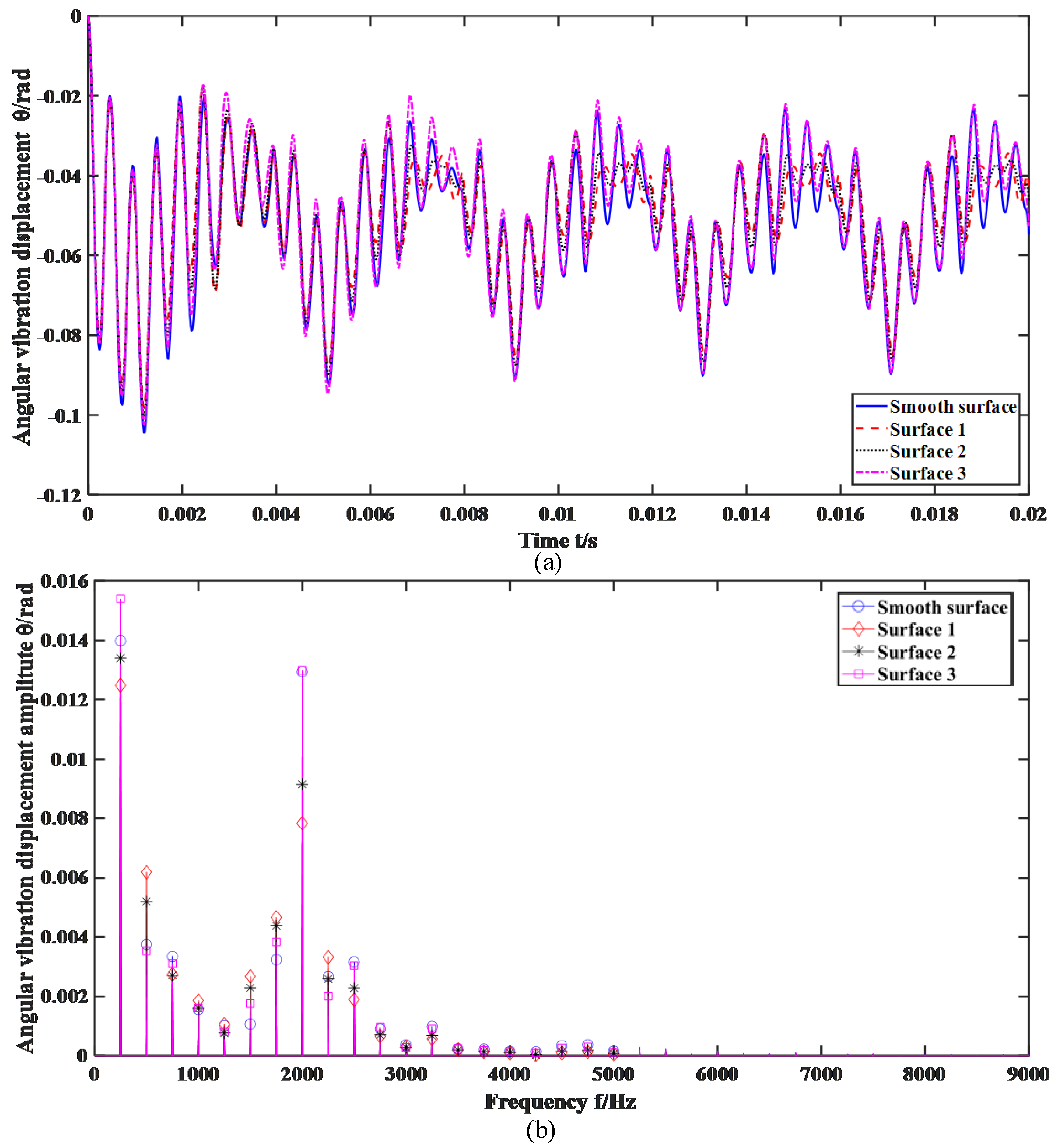
- Different surface roughness results in distinct vibration characteristics, with the overall trend being that the greater the roughness, the larger the amplitude of vibration. Although gears with different roughness have dissimilar frequency components, they all exhibit a clear harmonic characteristic. When the roughness is small, gear vibrations under rough surface conditions are less than those of smooth surface gear without considering roughness;
- (3).
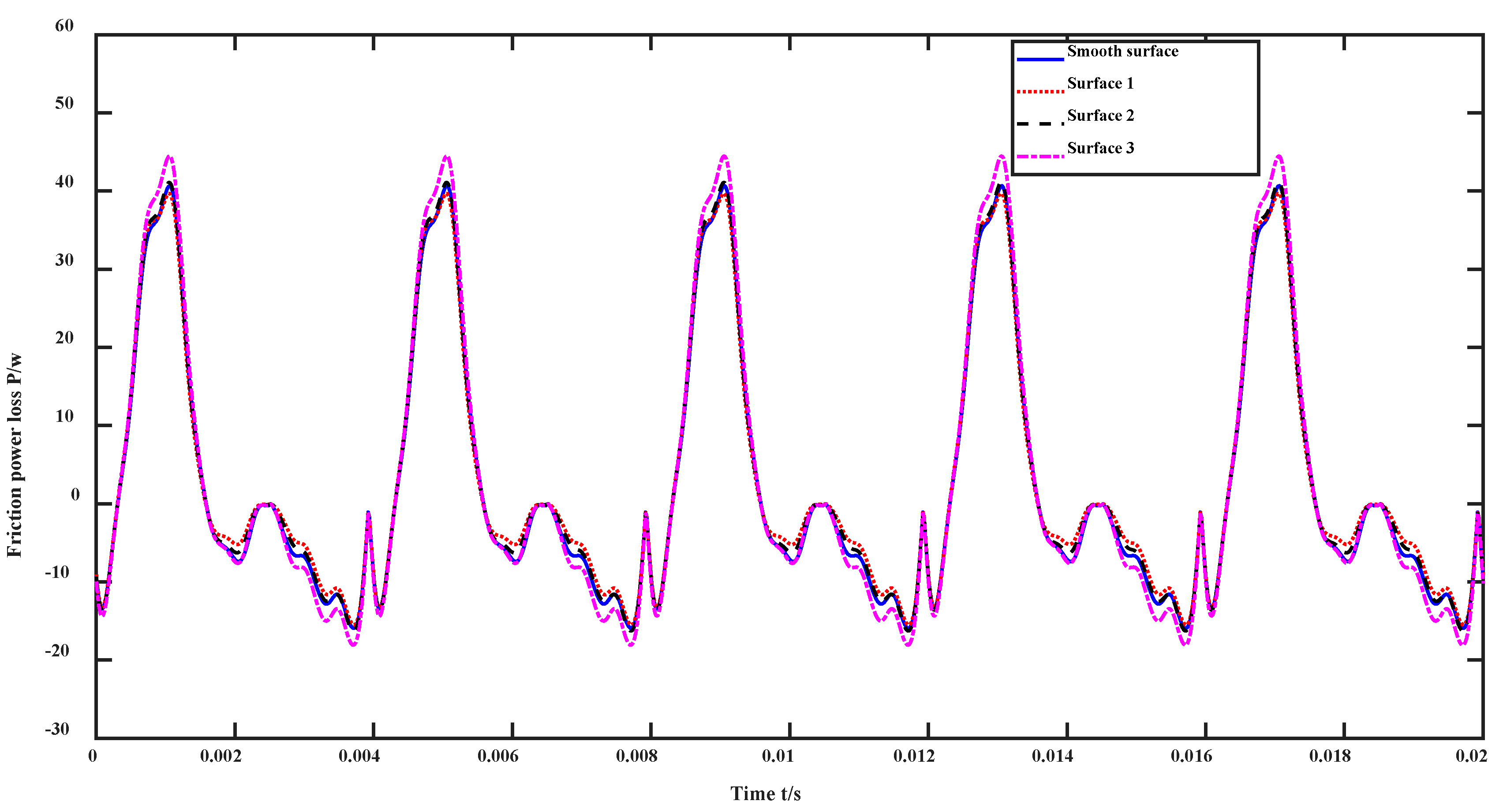
- A higher surface roughness leads to increased mesh force, where the mesh force of the rough surface gear surpasses that of the smoother surface gear. The energy loss is similar to the vibration displacement under varying levels of roughness, i.e., increasing roughness means more significant energy loss. Yet interestingly, the energy loss in the smooth surface gear control group, which does not factor in roughness, outweighs that in cases of lower surface roughness;
- (4).
- While the gear tribo-dynamics model established in this study has connected surface micro-topography with gear dynamic characteristics, providing a theoretical basis for improving gear service performance, there are still some shortcomings. Firstly, the coupling relationship between tribology and dynamics is not tight enough, and parameter exchange has not been realized through real-time iteration. Secondly, the evolution of surface topography under actual conditions has not been sufficiently considered. Lastly, the analyzed working conditions and surface topographies are insufficient. In our subsequent research, we will mainly focus on addressing these three shortcomings.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A
Appendix A.1. Gear Parameters

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Pinion | Wheel |
|---|---|---|
| Number of teeth | 30 | 36 |
| Module (mm) | 4 | 4 |
| Pressure angle (°) | 20 | 20 |
| Radius of the base circle (mm) | 56.382 | 67.658 |
| Rotation speed (rpm) | 500 | 416.667 |

Appendix A.2. Equation of Lubrication and Friction Analysis
References
- Wang, K.L.; Cheng, H.S. A Numerical solution to the dynamic load, film thickness, and surface temperatures in spur gears, part I: Analysis. J. Mech. Des. 1981, 103, 177–187. [Google Scholar] [CrossRef]
- Hua, D.Y.; Khonsari, M. Application of transient elastohydrodynamic lubrication analysis for gear transmissions. Tribol. Trans. 1995, 38, 905–913. [Google Scholar] [CrossRef]
- Shi, S.; Li, J.; Wu, L. An investigation of the lubrication regime in slow speed gearing under heavy loads. J. Southwest Jiaotong Univ. 1987, 1, 91–101. (In Chinese) [Google Scholar]
- Zhang, Y.; Mei, X. Study on the unsteady state effect of elastic-hydrodynamic lubrication in spur gear meshing. J. Mech. Eng. 2000, 36, 32–35. (In Chinese) [Google Scholar] [CrossRef]
- Yi, X.; Wang, Y. Analysis of the isothermal transient Non-Newtonian EHL of the involute spur gear. Lubr. Eng. 2004, 3, 54–56. (In Chinese) [Google Scholar]
- Chang, X.; Renqing, D.; Liao, L.; Zhu, P.; Lin, B.; Huang, Y.; Luo, S. Study on hydrodynamic lubrication and friction reduction performance of spur gear with groove texture. Tribol. Int. 2023, 177, 107978. [Google Scholar] [CrossRef]
- Lu, R.; Tang, W.; Huang, Q.; Xie, J. An Improved Load Distribution Model for Gear Transmission in Thermal Elastohydrodynamic Lubrication. Lubricants 2023, 11, 177. [Google Scholar] [CrossRef]
- Farrenkopf, F.; Schwarz, A.; Lohner, T.; Stahl, K. Analysis of a Low-Loss Gear Geometry Using a Thermal Elastohydrodynamic Simulation including Mixed Lubrication. Lubricants 2022, 10, 200. [Google Scholar] [CrossRef]
- Hirani, H.; Jangra, D.; Sidh, K.N. Experimental Analysis of Chemically Degraded Lubricant’s Impact on Spur Gear Wear. Lubricants 2023, 11, 201. [Google Scholar] [CrossRef]
- Hirani, H.; Jangra, D.; Sidh, K.N. Experimental Investigation on the Wear Performance of Nano-Additives on Degraded Gear Lubricant. Lubricants 2023, 11, 51. [Google Scholar] [CrossRef]
- Sivayogan, G.; Rahmani, R.; Rahnejat, H. Transient non-Newtonian elastohydrodynamics of rough meshing hypoid gear teeth subjected to complex contact kinematics. Tribol. Int. 2022, 167, 107398. [Google Scholar] [CrossRef]
- Wang, Y.; Li, H.; Tong, J.; Yang, P. Transient thermo-elastohydrodynamic lubrication analysis of an involute spur gear. Tribol. Int. 2004, 37, 773–782. [Google Scholar] [CrossRef]
- Lu, L.; Cai, Y. Transient Non-Newtonian elastohydrodynamic lubrication of spur gear transmission. Lubr. Eng. 2005, 6, 36–38. (In Chinese) [Google Scholar]
- Guilbault, R.; Lalonde, S.; Thomas, M. Nonlinear damping calculation in cylindrical gear dynamic modeling. J. Sound Vib. 2012, 33, 2110–2128. [Google Scholar] [CrossRef]
- Zhang, Y.; Liu, H.; Zhu, C.; Liu, M.; Song, C. Oil film stiffness and damping in an elastohydrodynamic lubrication line contact-vibration. J. Mech. Sci. Technol. 2016, 30, 3031–3039. [Google Scholar] [CrossRef]
- Zhou, C.; Xiao, Z.; Chen, S.; Han, X. Normal and tangential oil film stiffness of modified spur gear with non-Newtonian elastohydrodynamic lubrication. Tribol. Int. 2017, 109, 319–327. [Google Scholar] [CrossRef]
- Zhou, C.J.; Xiao, Z.L. Stiffness and damping models for the oil film in line contact elastohydrodynamic lubrication and applications in the gear drive. Appl. Math. Model. 2018, 61, 634–649. [Google Scholar] [CrossRef]
- Xiao, Z.L. Oil Film Stiffness Model and Parameter Analysis for Modified Spur Gears Based on Elastohydrodynamic Lubrication. Ph.D. Thesis, Hunan University, Changsha, China, 2017. [Google Scholar]
- Castro, J.; Campos, A.; Sottomayor, A.; Seabra, J. Friction coefficient between gear teeth in mixed film lubrication. In Tribology and Interface Engineering Series; Elsevier: Amsterdam, The Netherlands, 2005; Volume 48, pp. 525–533. [Google Scholar]
- Ouyang, T.; Cheng, N.; Niu, Y. Mixed elastohydrodynamic lubrication for involute gear with different rough surfaces. J. Jilin Univ. (Eng. Technol. Ed.) 2016, 46, 1933–1939. (In Chinese) [Google Scholar]
- Li, S.; Kahraman, A. A transient mixed elastohydrodynamic lubrication model for spur gear pairs. J. Tribol. 2010, 132, 011501. [Google Scholar] [CrossRef]
- Chimanpure, A.S.; Kahraman, A.; Talbot, D. A transient mixed elastohydrodynamic lubrication model for helical gear contacts. J. Tribol. 2021, 143, 061601. [Google Scholar] [CrossRef]
- Cheng, G.; Xiao, K.; Wang, J.; Pu, W.; Han, Y. Calculation of gear meshing stiffness considering lubrication. J. Tribol. 2020, 142, 031602. [Google Scholar] [CrossRef]
- Cheng, G.; Xiao, K.; Wang, J. Contact damping and stiffness calculation model for rough surface considering lubrication in involute spur gear. Int. J. Appl. Mech. 2021, 13, 2150078. [Google Scholar] [CrossRef]
- Wang, Z.; Pu, W.; Pei, X.; Cao, W. Contact stiffness and damping of spiral bevel gears under transient mixed lubrication conditions. Friction 2022, 10, 545–559. [Google Scholar] [CrossRef]
- Li, S. A thermal tribo-dynamic mechanical power loss model for spur gear pairs. Tribol. Int. 2015, 88, 170–178. [Google Scholar] [CrossRef]
- Li, S.; Anisetti, A. A tribo-dynamic contact fatigue model for spur gear pairs. Int. J. Fatigue 2017, 98, 81–91. [Google Scholar] [CrossRef]
- Ankouni, M.; Lubrecht, A.; Velex, P. Modelling of damping in lubricated line contacts—Applications to spur gear dynamic simulations. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2016, 230, 1222–1232. [Google Scholar] [CrossRef]
- Xiao, Z.; Zhou, C.; Chen, S.; Li, Z. Effects of oil film stiffness and damping on spur gear dynamics. Nonlinear Dyn. 2019, 96, 145–159. [Google Scholar] [CrossRef]
- Cao, W.; Pu, W.; Wang, J. Tribo-dynamic model and fatigue life analysis of spiral bevel gears. Eur. J. Mech. A Solid 2019, 74, 124–138. [Google Scholar] [CrossRef]
- Cao, W.; He, T.; Pu, W.; Ke, X. Dynamics of lubricated spiral bevel gears under different contact paths. Friction 2022, 10, 247–267. [Google Scholar] [CrossRef]
- Huang, S.W. The Influence of Micro Surface Topography on Gear Dynamic Parameters and Dynamic Characteristics. Master’s thesis, Hefei University of Technology, Hefei, China, 2016. [Google Scholar]
- Li, Z.; Wang, J.; Zhang, H.; Chen, J.; Liu, K. Influence of surface topography on the friction and dynamic characteristics of spur gears. Proc. Inst. Mech. Eng. Part J J. Eng. Tribol. 2020, 234, 1892–1907. [Google Scholar] [CrossRef]
- Xiang, G.; Yang, T.; Guo, J.; Wang, J. Optimization transient wear and contact performances of water-lubricated bearings under fluid-solid-thermal coupling condition using profile modification. Wear 2022, 502–503, 204379. [Google Scholar] [CrossRef]
- Tang, D.; Xiang, G.; Guo, J.; Cai, J.; Yang, T.; Wang, J.; Han, Y. On the optimal design of staved water-lubricated bearings driven by tribo-dynamic mechanism. Phys. Fluids 2023, 35, 093611. [Google Scholar] [CrossRef]
- Guo, J.; Ding, B.; Wang, Y.; Han, Y. Co-optimization for hydrodynamic lubrication and leakage of V-shape textured bearings via linear weighting summation. Phys. Scr. 2023, 98, 125218. [Google Scholar] [CrossRef]
- Gupta, N.; Tandon, N.; Pandey, R.K.; Vidyasagar, K.C.; Kalyanasundaram, D. Tribodynamic studies of textured gearsets lubricated with fresh and MoS2 blended greases. Tribol. Int. 2022, 165, 107247. [Google Scholar] [CrossRef]
- Jiang, Y.; Chen, Z.; Tong, S.; Li, S.; Tong, Z. Gear tribodynamic modeling and analysis considering tooth profile modification. Tribol. Int. 2023, 178, 108023. [Google Scholar] [CrossRef]
- Chen, Z.; Jiang, Y.; Li, S.; Tong, Z.; Tong, S.; Tang, N. Uncertainty propagation of correlated lubricant properties in gear tribodynamic system. Tribol. Int. 2023, 179, 107812. [Google Scholar] [CrossRef]
- Li, Z.; Zhu, C.; Liu, H.; Gu, Z. Mesh stiffness and nonlinear dynamic response of a spur gear pair considering tribo-dynamic effect. Mech. Mach. Theory 2020, 153, 103989. [Google Scholar] [CrossRef]
- Mughal, H.; Dolatabadi, N.; Rahmani, R. An integrated tribodynamic model for investigation of efficiency, durability and NVH attributes of gear mesh in electric vehicle powertrains. Tribol. Int. 2023, 189, 108977. [Google Scholar] [CrossRef]
- Jiang, Y.; Tong, S.; Tong, Z.; Li, S.; Cheng, W. Tribodynamic analysis of spur gear drives with uncertain time-variant loads: An interval process approach. Mech. Mach. Theory 2024, 191, 105511. [Google Scholar] [CrossRef]
- Huangfu, Y.; Dong, X.; Chen, K.; Tu, G.; Long, X.; Peng, Z. A tribo-dynamic based pitting evolution model of planetary gear sets: A topographical updating approach. Int. J. Mech. Sci. 2022, 220, 107157. [Google Scholar] [CrossRef]
- Chen, Z.; Jiang, Y.; Li, S.; Tong, Z.; Tong, S.; Tang, N. Effect of lubricant viscosity on dynamics of high-precision gear considering lubricant-induced backlash reduction. Tribol. Int. 2022, 168, 107447. [Google Scholar] [CrossRef]
- Sánchez, M.B.; Pleguezuelos, M.; Pedrero, J.I. Approximate equations for the meshing stiffness and the load sharing ratio of spur gears including hertzian effects. Mech. Mach. Theory 2017, 109, 231–249. [Google Scholar] [CrossRef]
- Ren, N.; Zhu, D.; Chen, W.W.; Liu, Y.; Wang, Q.J. A three-dimensional deterministic model for rough surface line-contact EHL problems. J. Tribol. 2009, 131, 011501. [Google Scholar] [CrossRef]
- Yang, D.C.H.; Lin, J.Y. Hertzian damping, tooth friction and bending elasticity in gear impact dynamics. J. Mech. Trans. Autom. Des. 1987, 109, 189–196. [Google Scholar] [CrossRef]
- Sainsot, P.; Velex, P.; Duverger, O. Contribution of gear body to tooth deflections-a new bi-dimensional analytical formula. J. Mech. Des. 2004, 126, 748–752. [Google Scholar] [CrossRef]
- Bakolas, V. Numerical generation of arbitrarily oriented non-Gaussian three dimensional rough surfaces. Wear 2003, 254, 546–554. [Google Scholar] [CrossRef]
- Smith, J.D. Gear Noise and Vibration; Marcel Dekker: New York, NY, USA, 2003; pp. 27–76. [Google Scholar]



| Parameters | Pinion | Wheel |
|---|---|---|
| Number of teeth | 30 | 36 |
| Module (mm) | 4 | 4 |
| Pressure angle (°) | 20 | |
| Load (N·m) | 50 | |
| Rotation speed (rpm) | 500 | 416.667 |
| Mass (kg) | 1.582 | 2.3566 |
| Moment of inertia (kg·m2) | 0.001753 | 0.003536 |
| Bearing stiffness (N/m)/damping (N·s/m) | 6.9127 × 108/1804 | |
| Torsional stiffness (N/m)/damping (N·s/m) | 7.6712 × 108/2209 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cheng, G.; Ma, J.; Li, J.; Sun, K.; Wang, K.; Wang, Y. Study on the Dynamic Characteristics of Gears Considering Surface Topography in a Mixed Lubrication State. Lubricants 2024, 12, 7. https://doi.org/10.3390/lubricants12010007
Cheng G, Ma J, Li J, Sun K, Wang K, Wang Y. Study on the Dynamic Characteristics of Gears Considering Surface Topography in a Mixed Lubrication State. Lubricants. 2024; 12(1):7. https://doi.org/10.3390/lubricants12010007
Chicago/Turabian StyleCheng, Gong, Jianzuo Ma, Junyang Li, Kang Sun, Kang Wang, and Yun Wang. 2024. "Study on the Dynamic Characteristics of Gears Considering Surface Topography in a Mixed Lubrication State" Lubricants 12, no. 1: 7. https://doi.org/10.3390/lubricants12010007
APA StyleCheng, G., Ma, J., Li, J., Sun, K., Wang, K., & Wang, Y. (2024). Study on the Dynamic Characteristics of Gears Considering Surface Topography in a Mixed Lubrication State. Lubricants, 12(1), 7. https://doi.org/10.3390/lubricants12010007