Study on the Influence of Environmental Conditions on Road Friction Characteristics

 ,
,  ,
,
Abstract
1. Introduction
1.1. Background
1.2. Road Friction Estimation Method
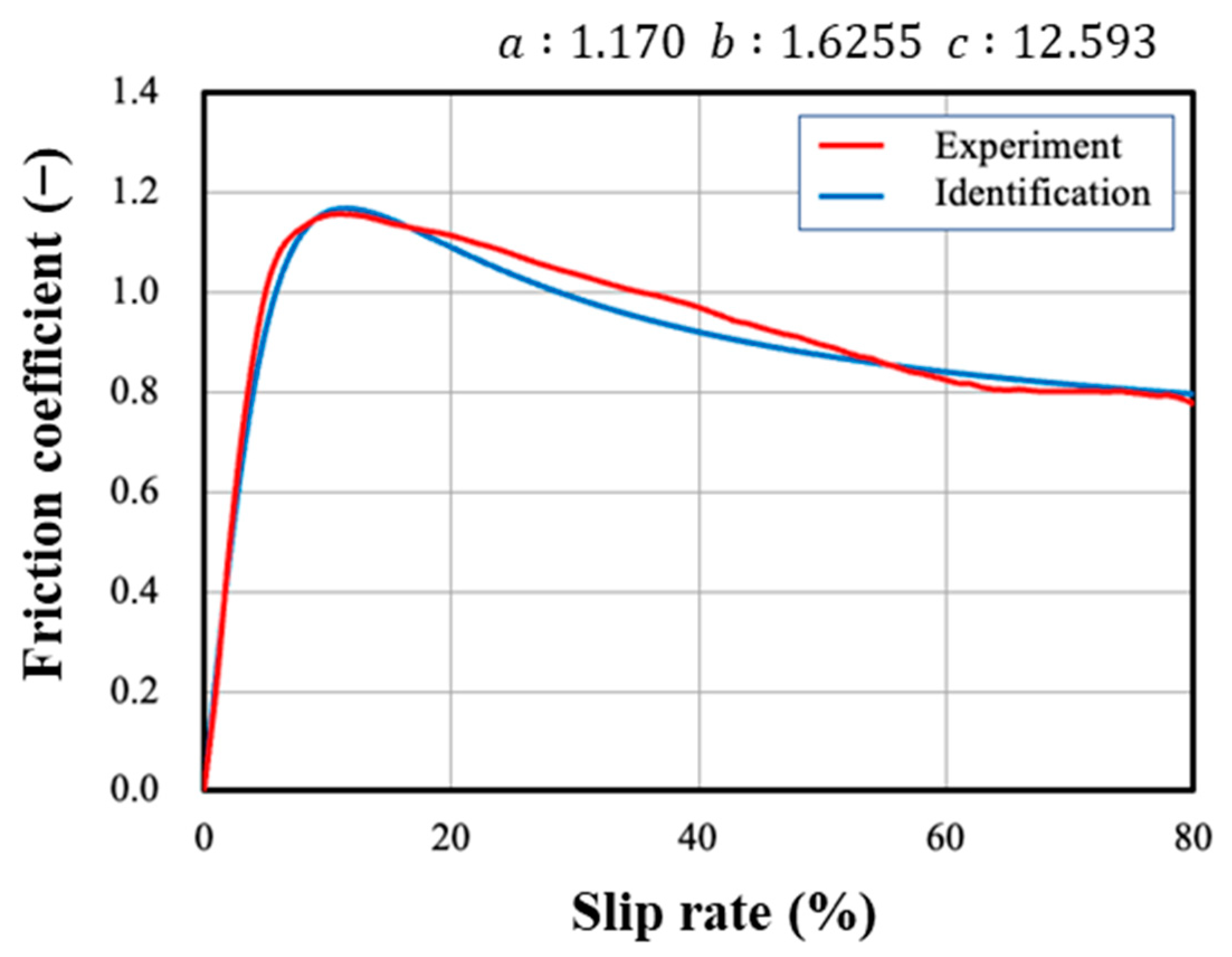
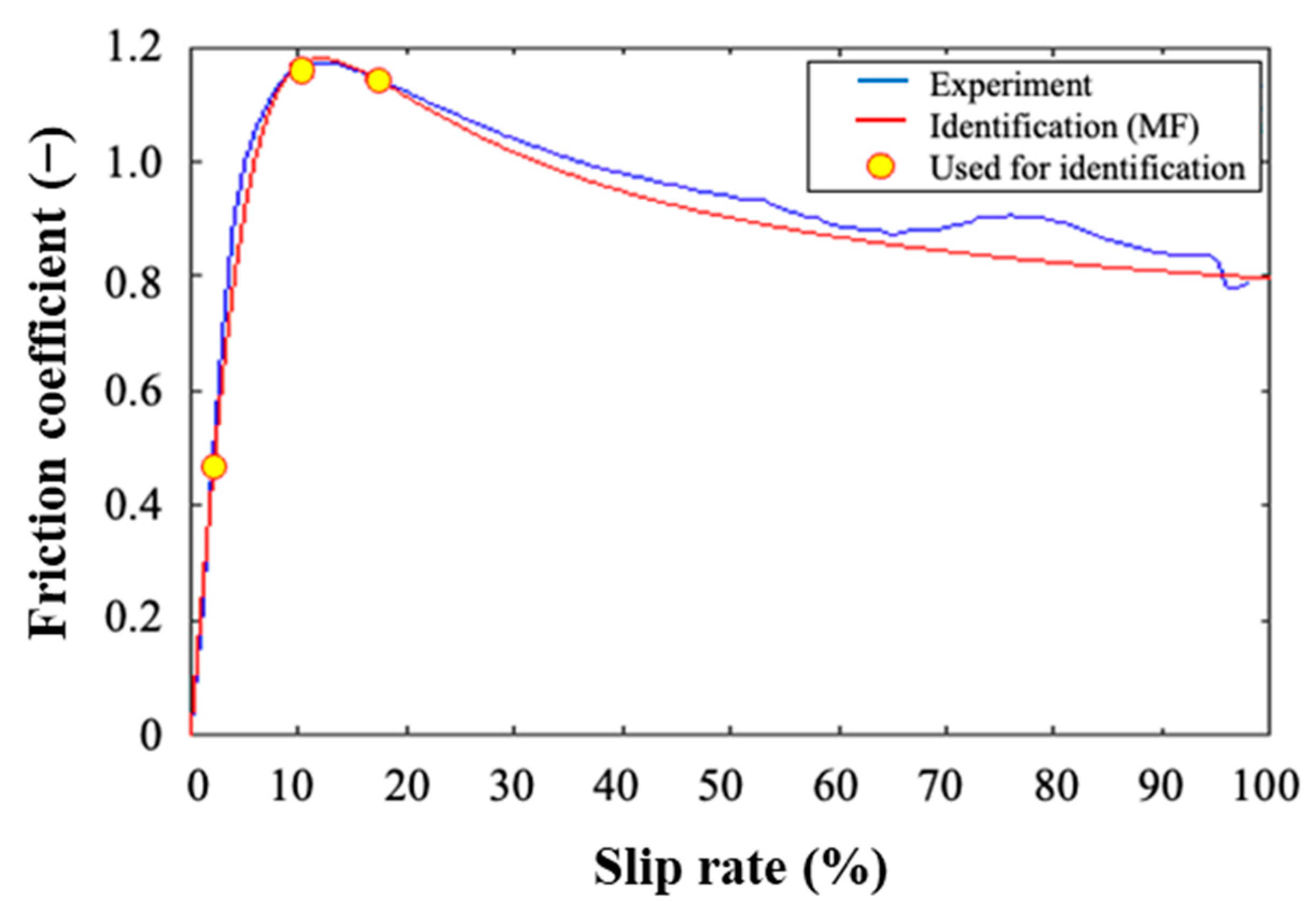
1.3. Tire Characteristic Models
1.4. Road Friction Characteristics Measurement
1.5. Purpose of Research
- (1)
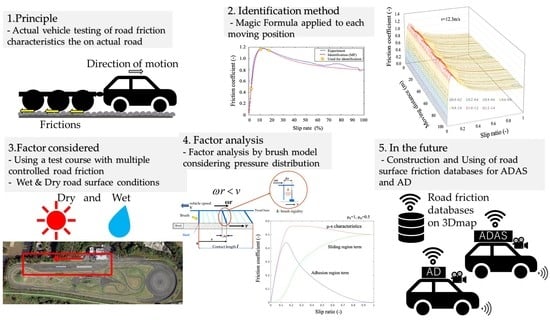
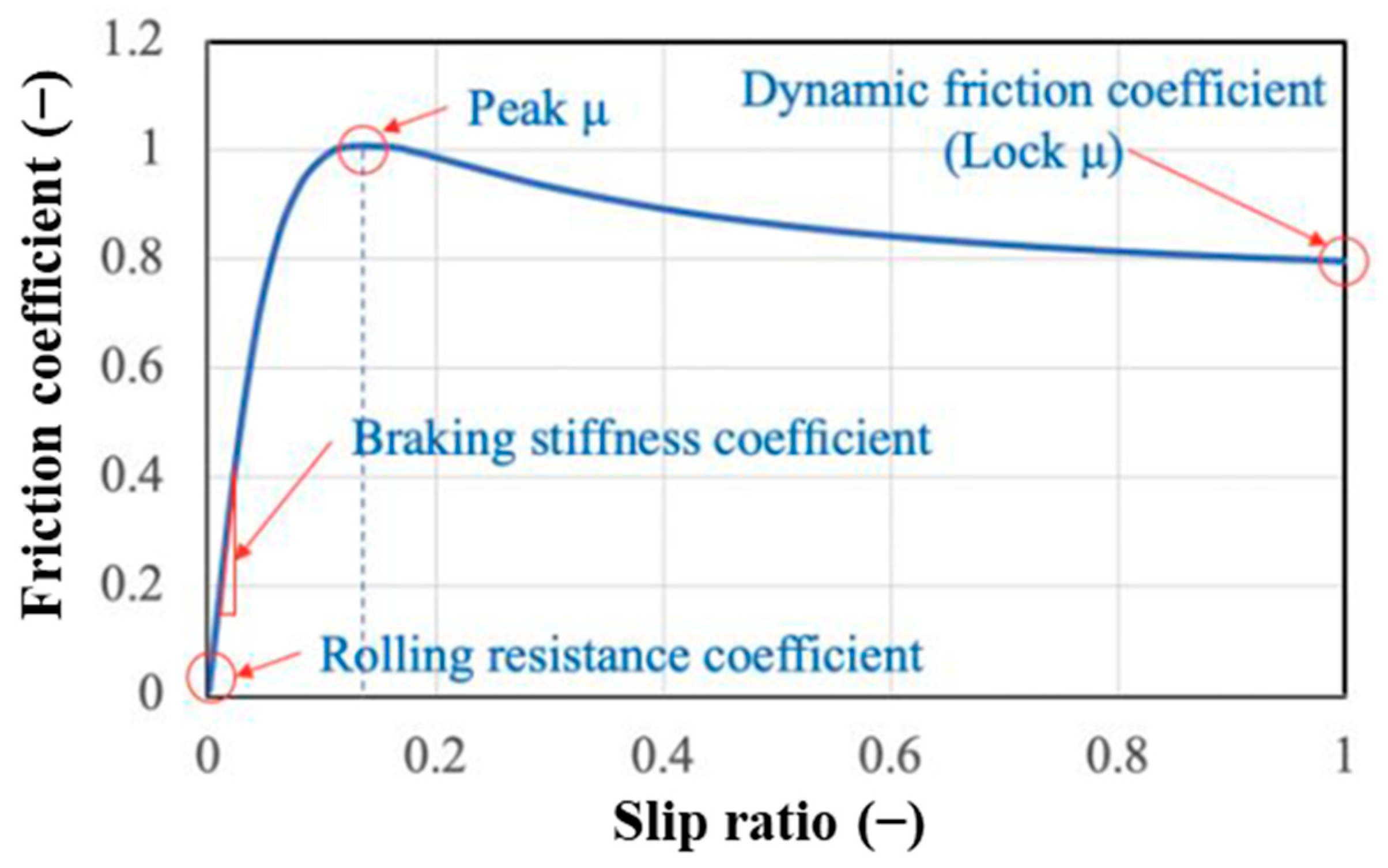
- To evaluate the results of the measurements quantitatively and qualitatively on a test course, wherein the coefficient of friction on a wet surface is presented, and to better define the differences between the dry and wet surface characteristics.
- (2)
- To investigate and characterize the relationship between the variation of the peak μ analyzed using the brush model and the maximum static friction, DF, and tire tread stiffness.
2. Constructed Measurement System
2.1. Preface
- (1)
- Ability to measure friction force dependent on the running position;
- (2)
- Ensure continuity of data during measurement.
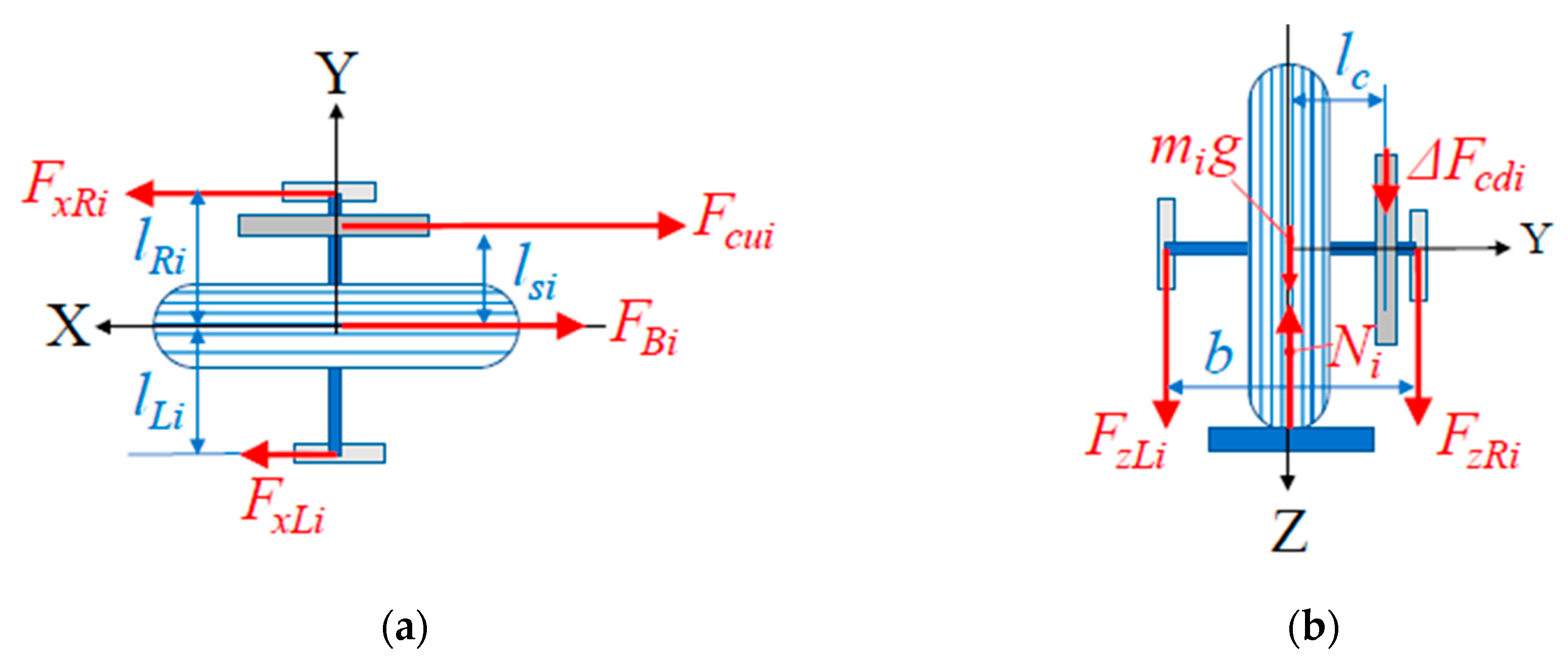
2.2. Functions and Algorithms Used for Identification
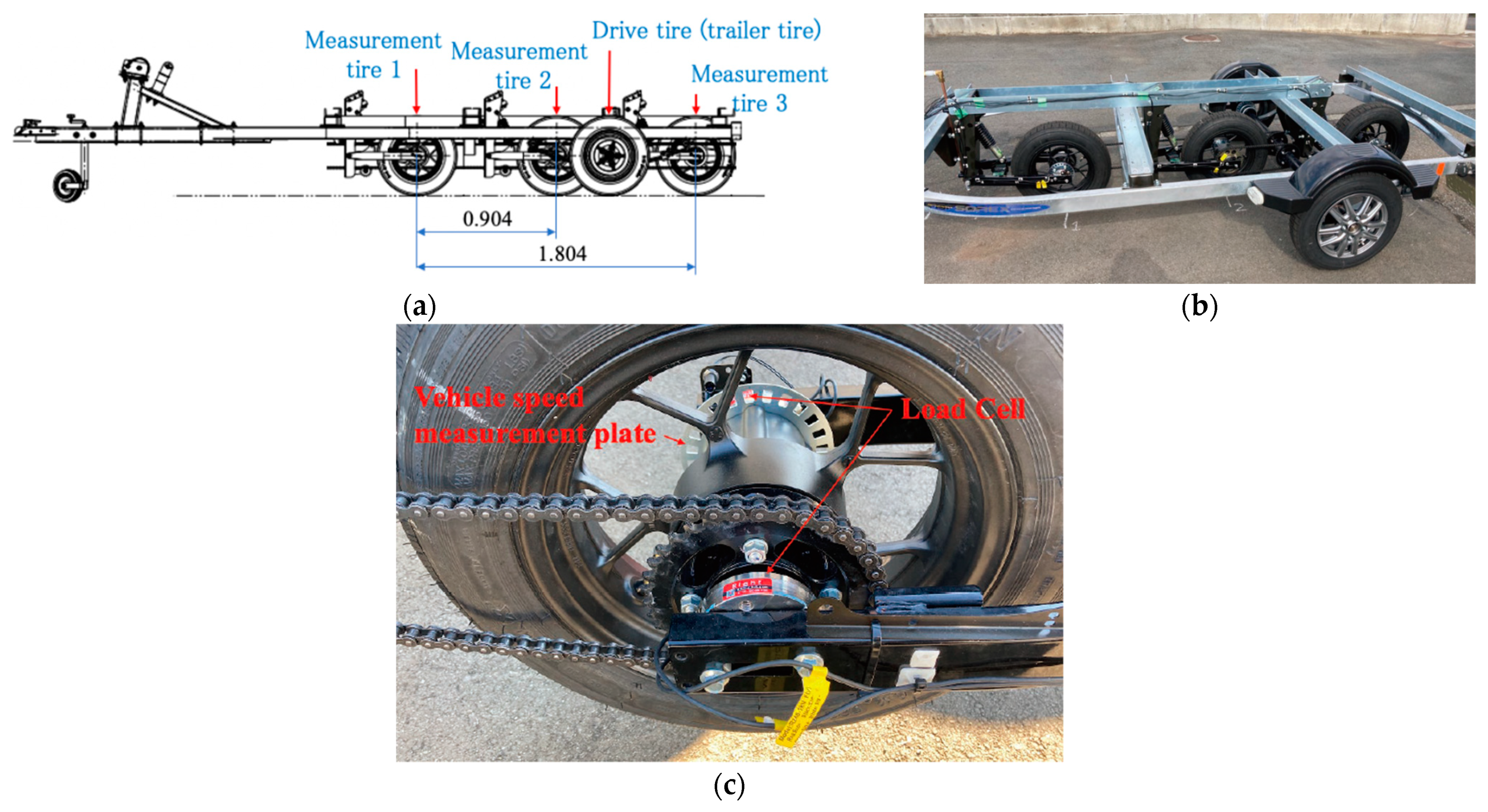
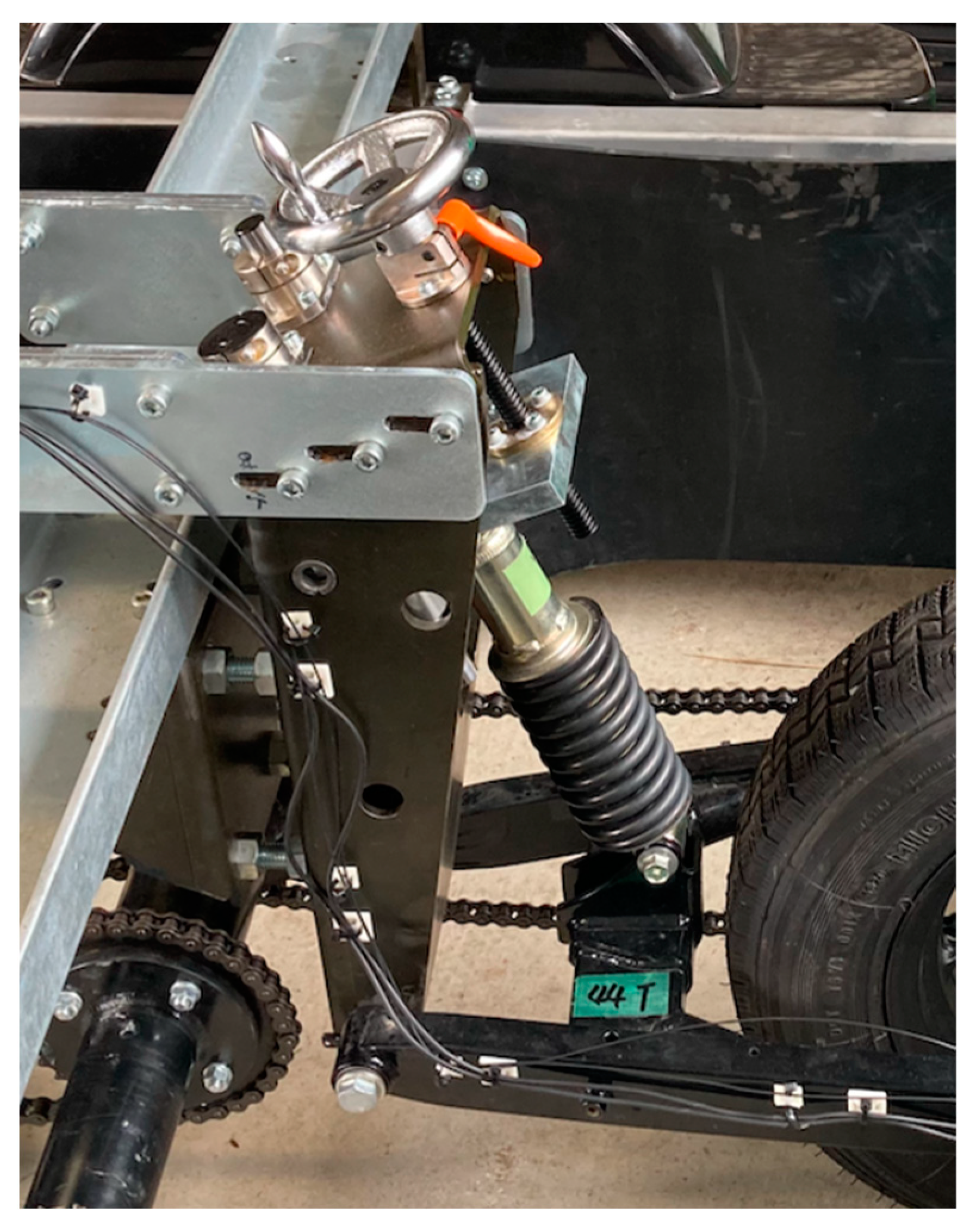
2.3. Mechanisms for Measuring Road Friction Characteristics
2.4. Settings for Measurement Conditions
3. Experiments on Proving Ground
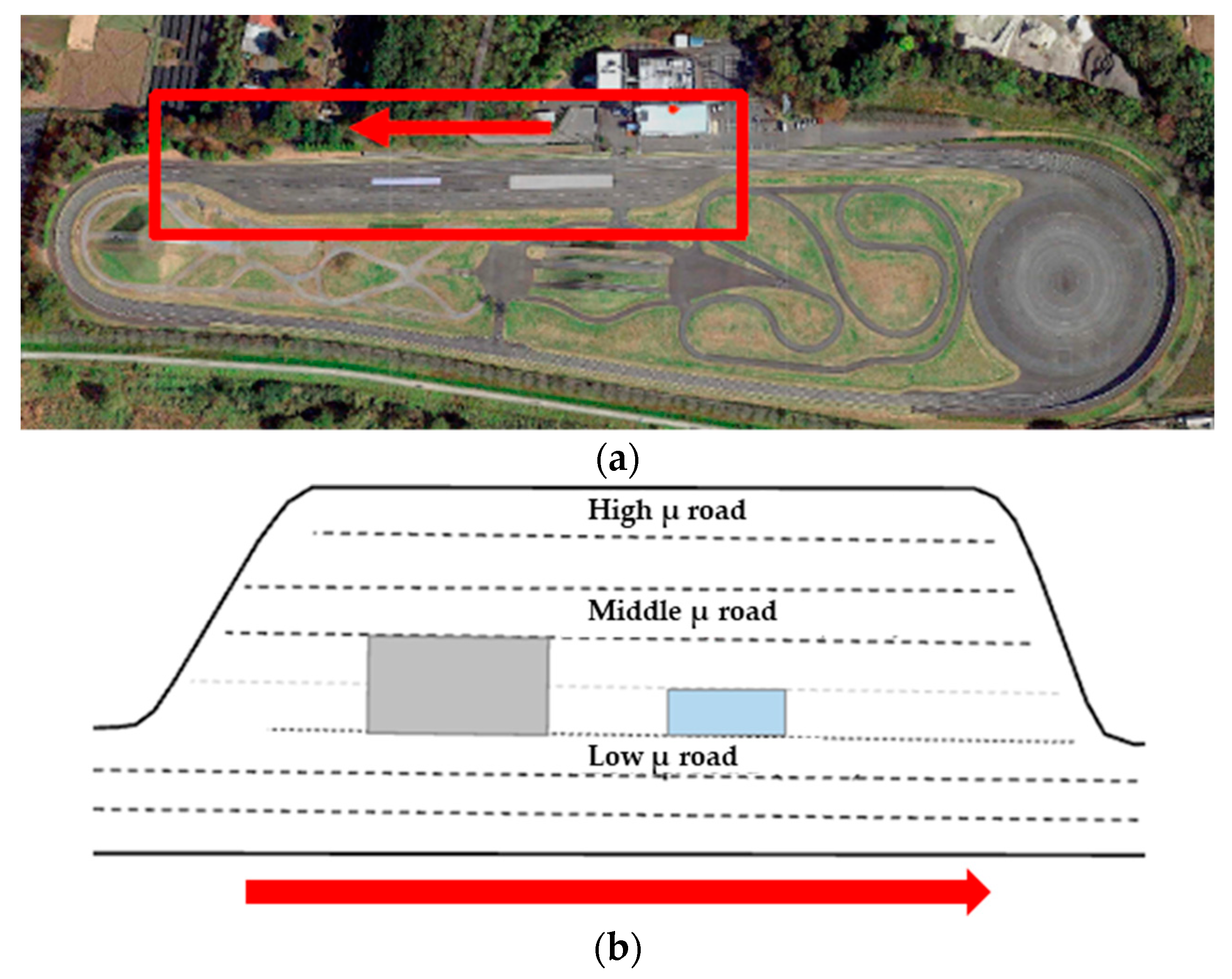
3.1. Outline of Measurement Course
3.2. Experimental Data
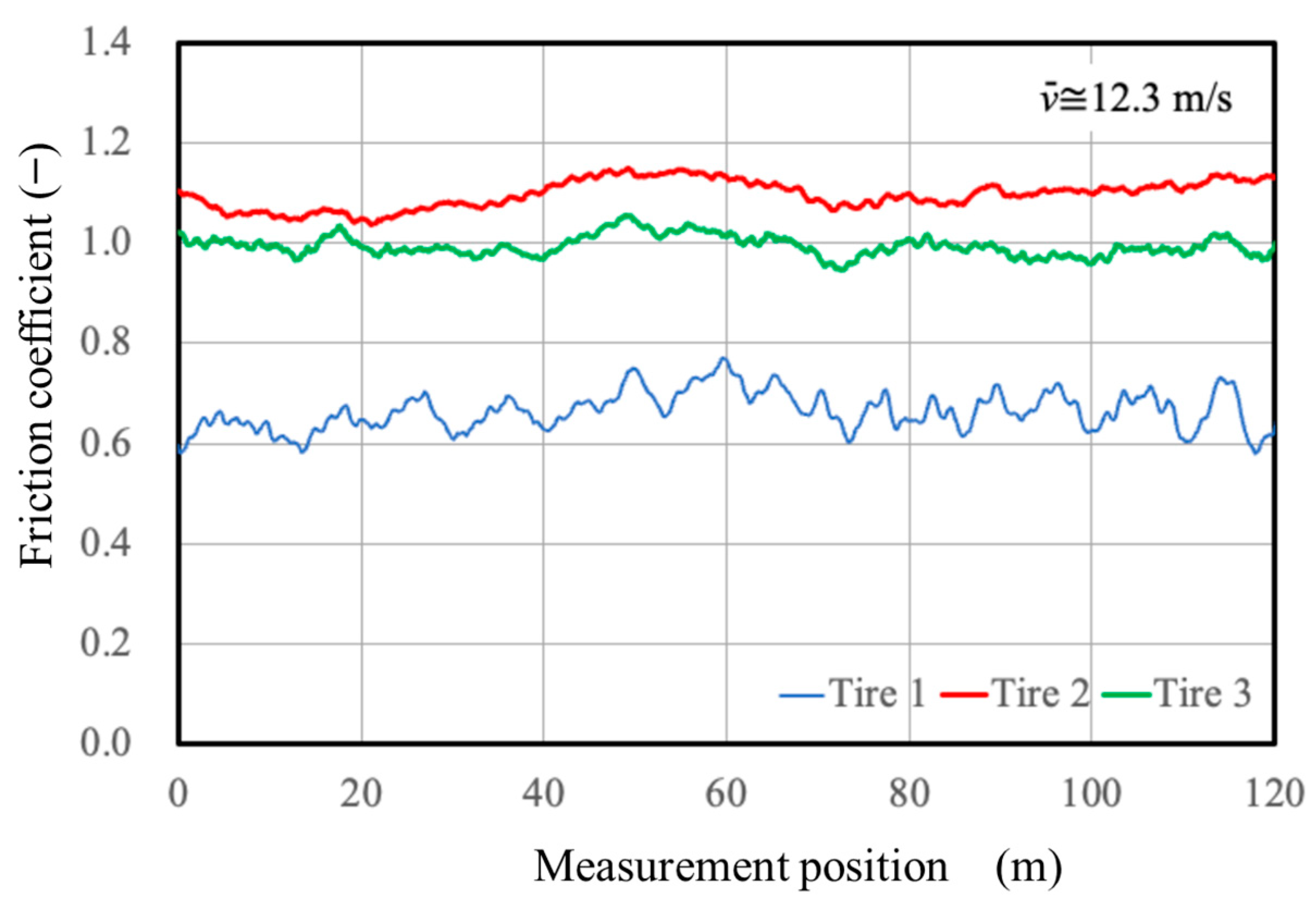
3.3. Measurement Results
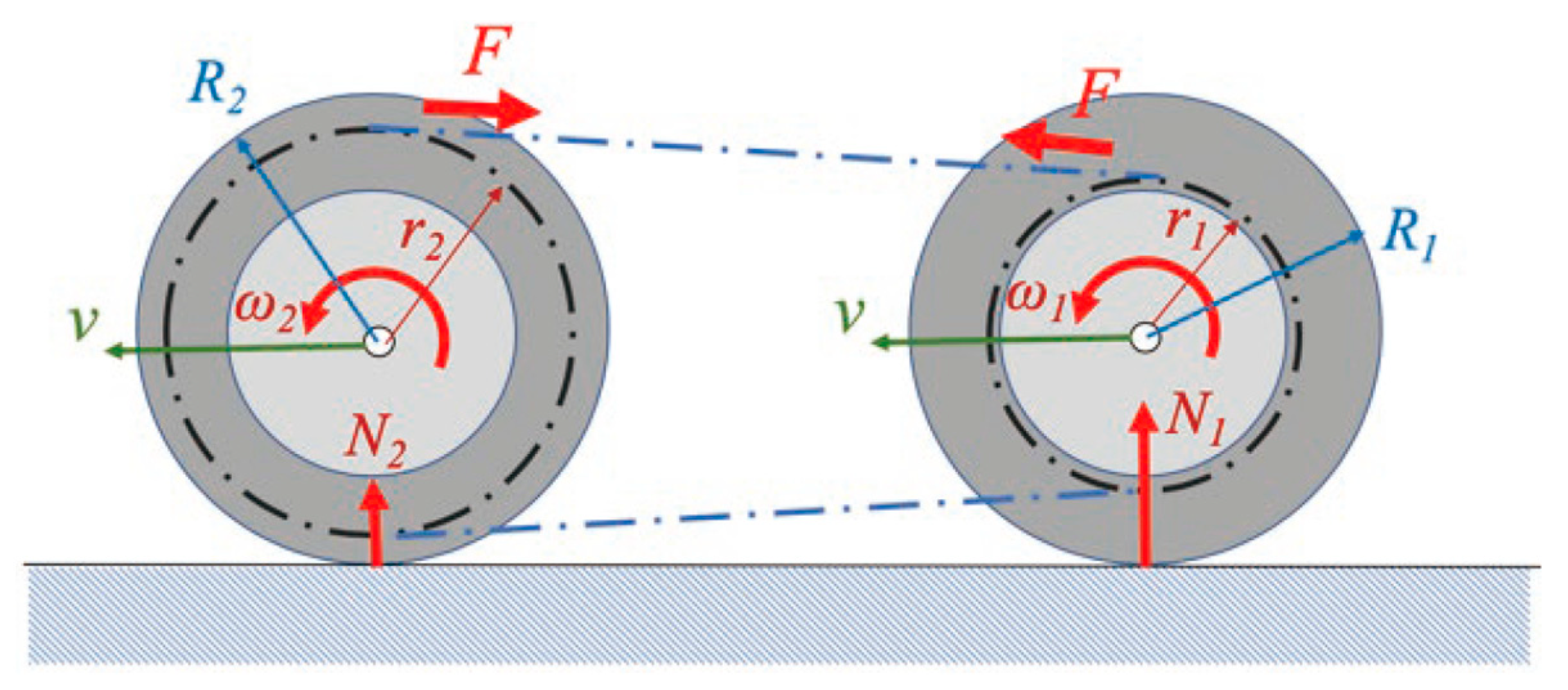
4. Braking Force Analysis Using Brush Model
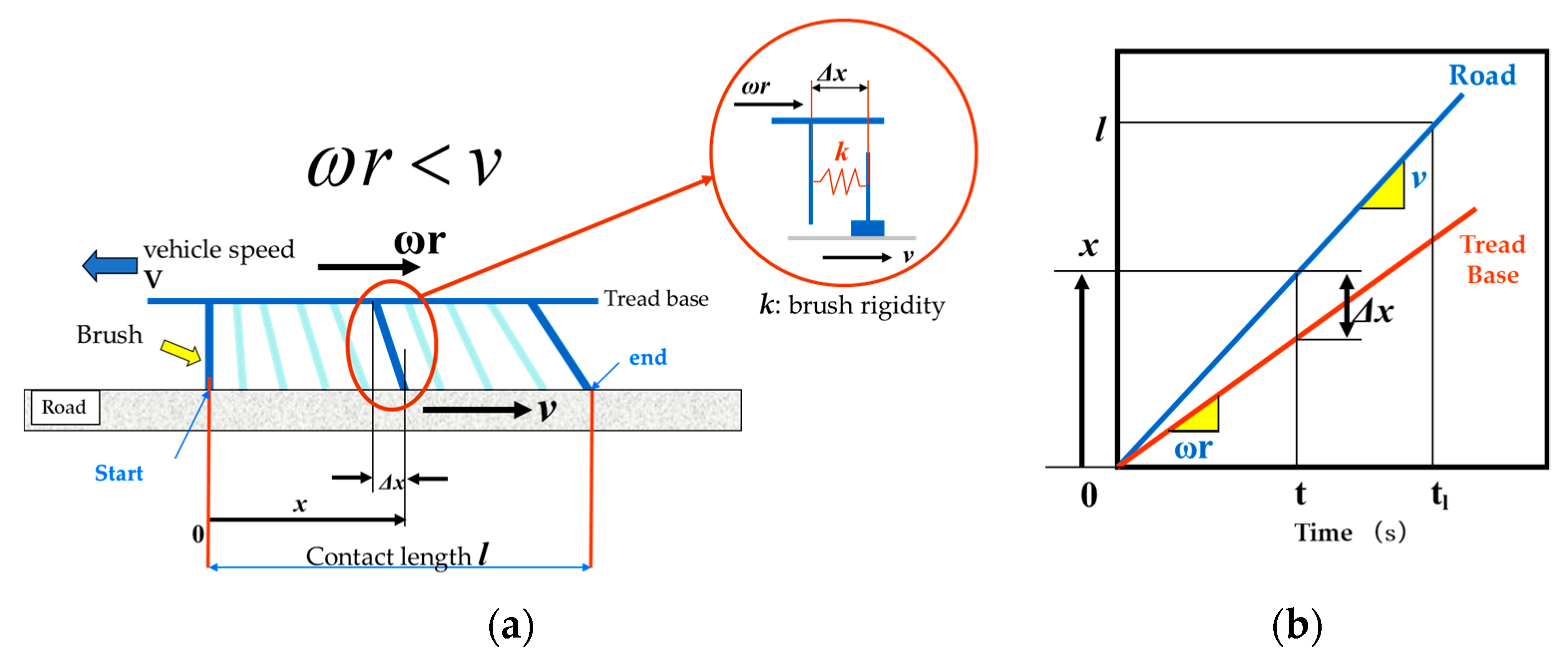
4.1. Brush Model
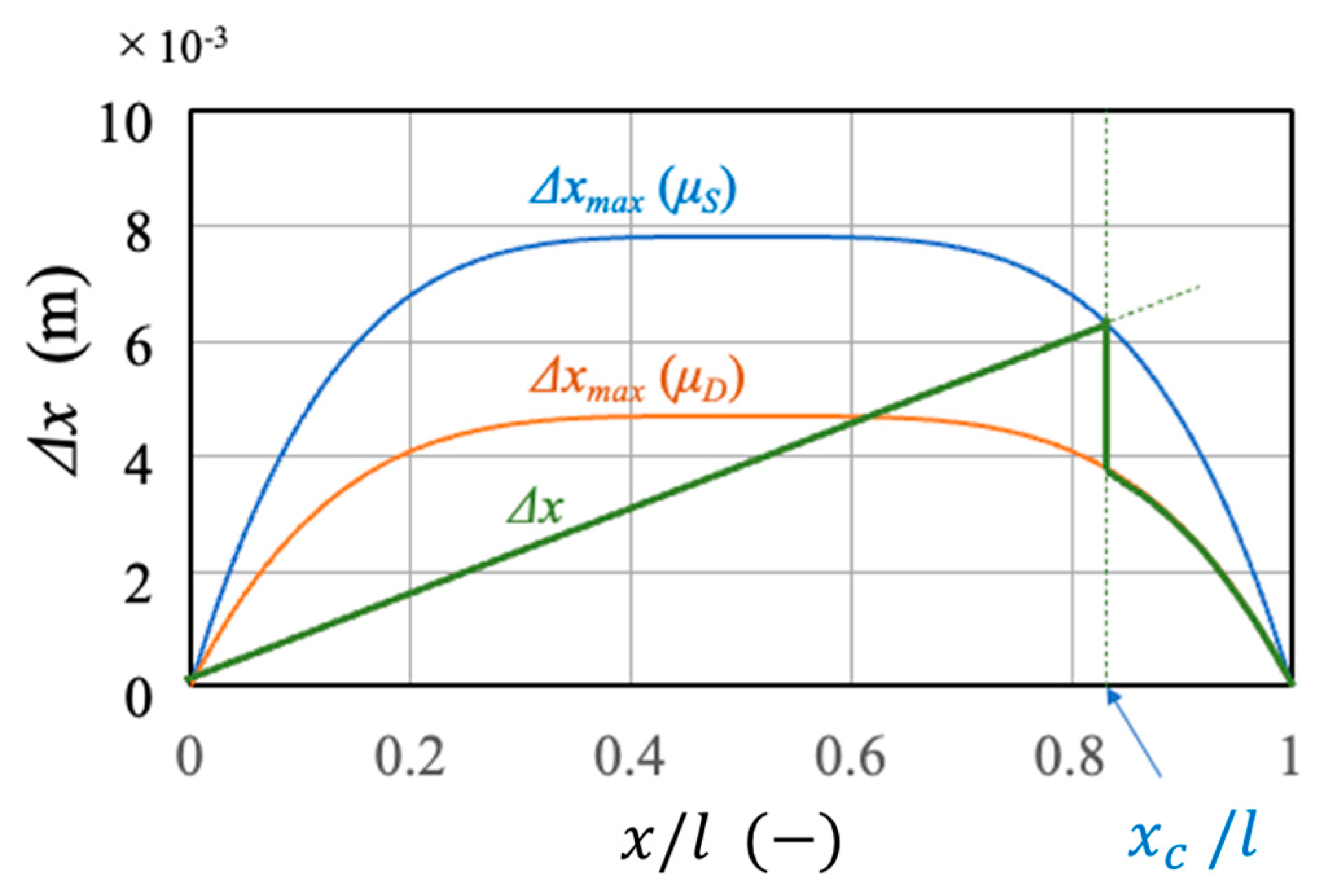
4.2. Analysis of Peak μ Position Using Brush Model
5. Conclusions
- (1)
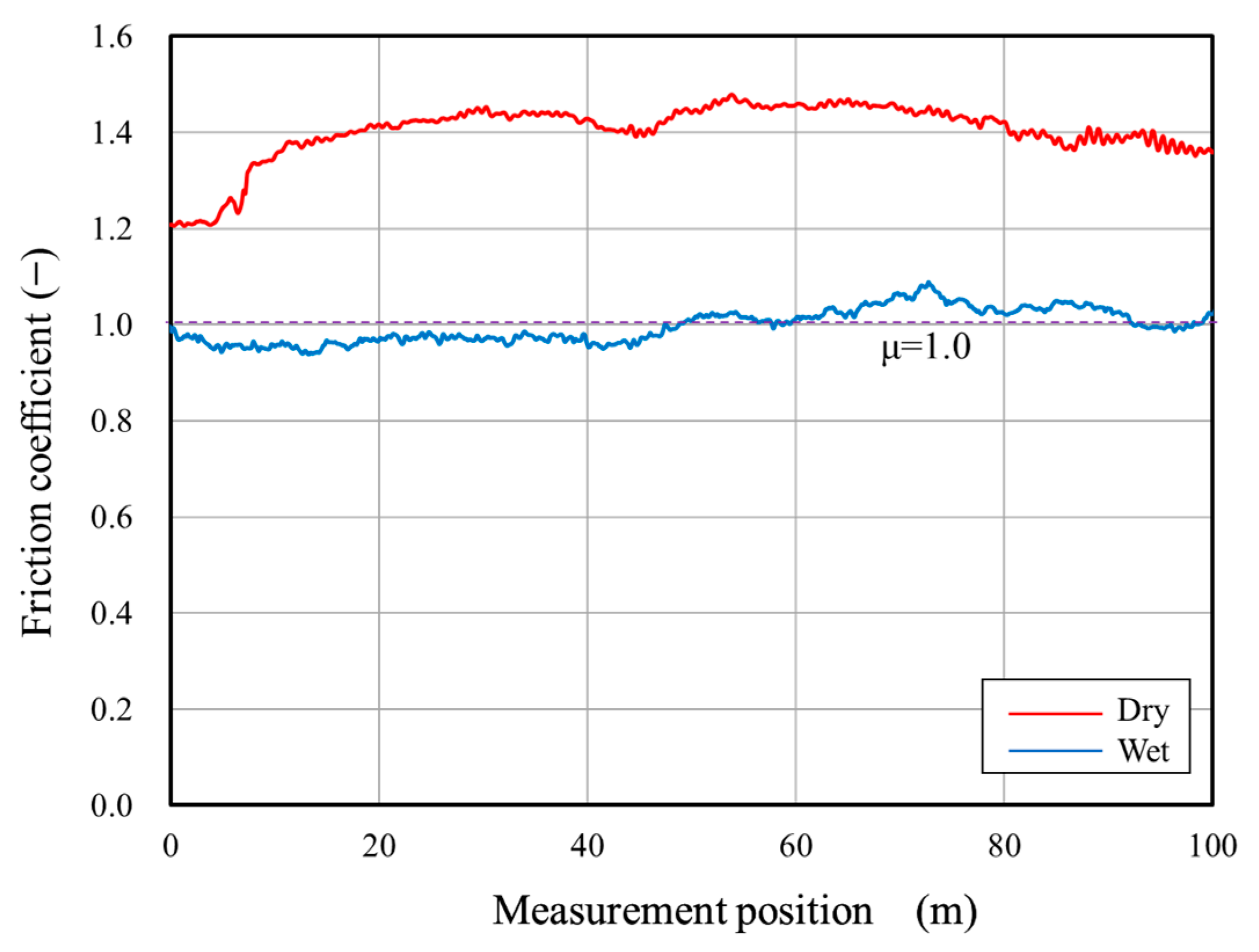
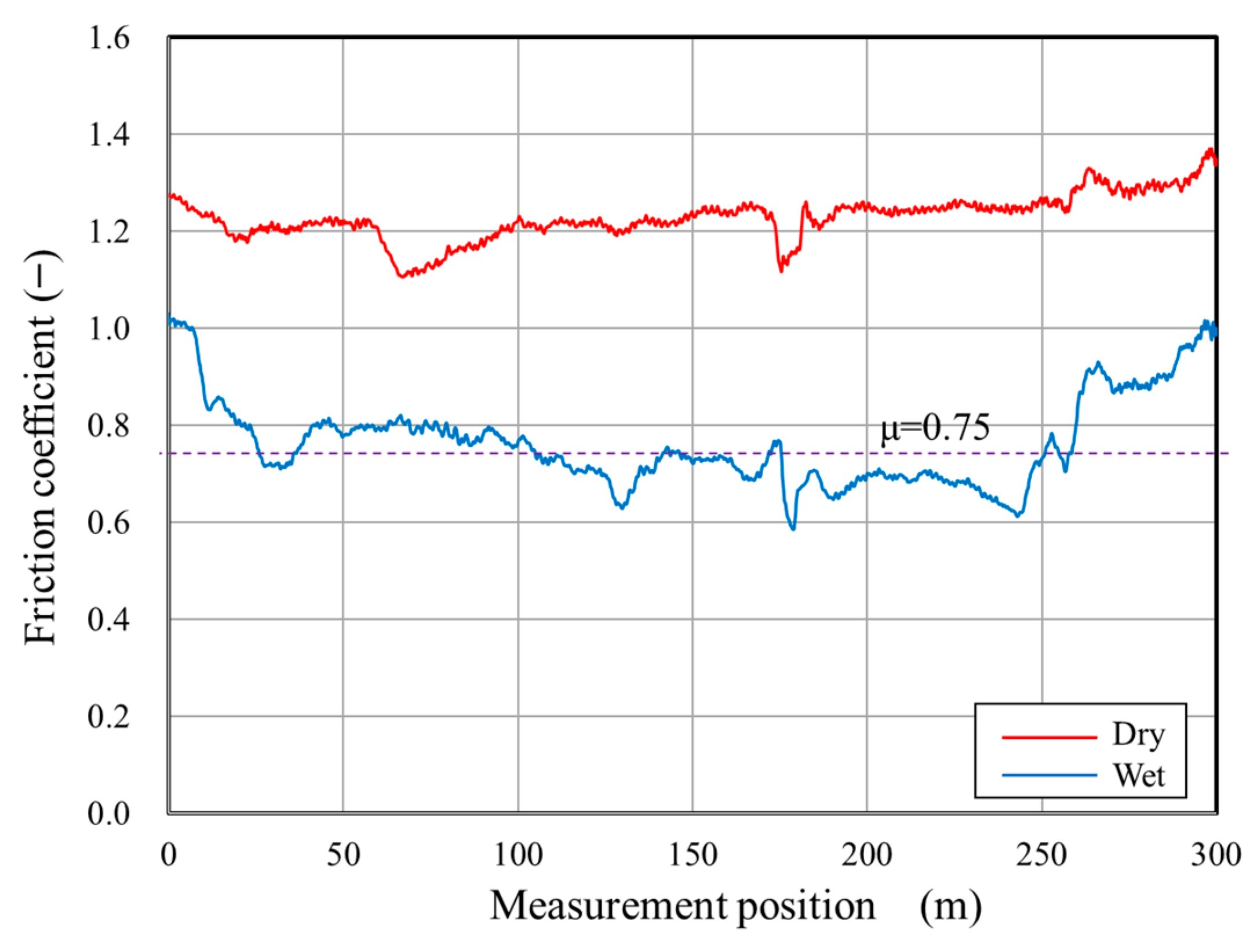
- From the results of the measurements of the road surface, which appeared to be almost uniform, it was confirmed that the friction characteristics always fluctuated, and the importance of continuous measurement of the road surface friction characteristics was demonstrated.
- (2)
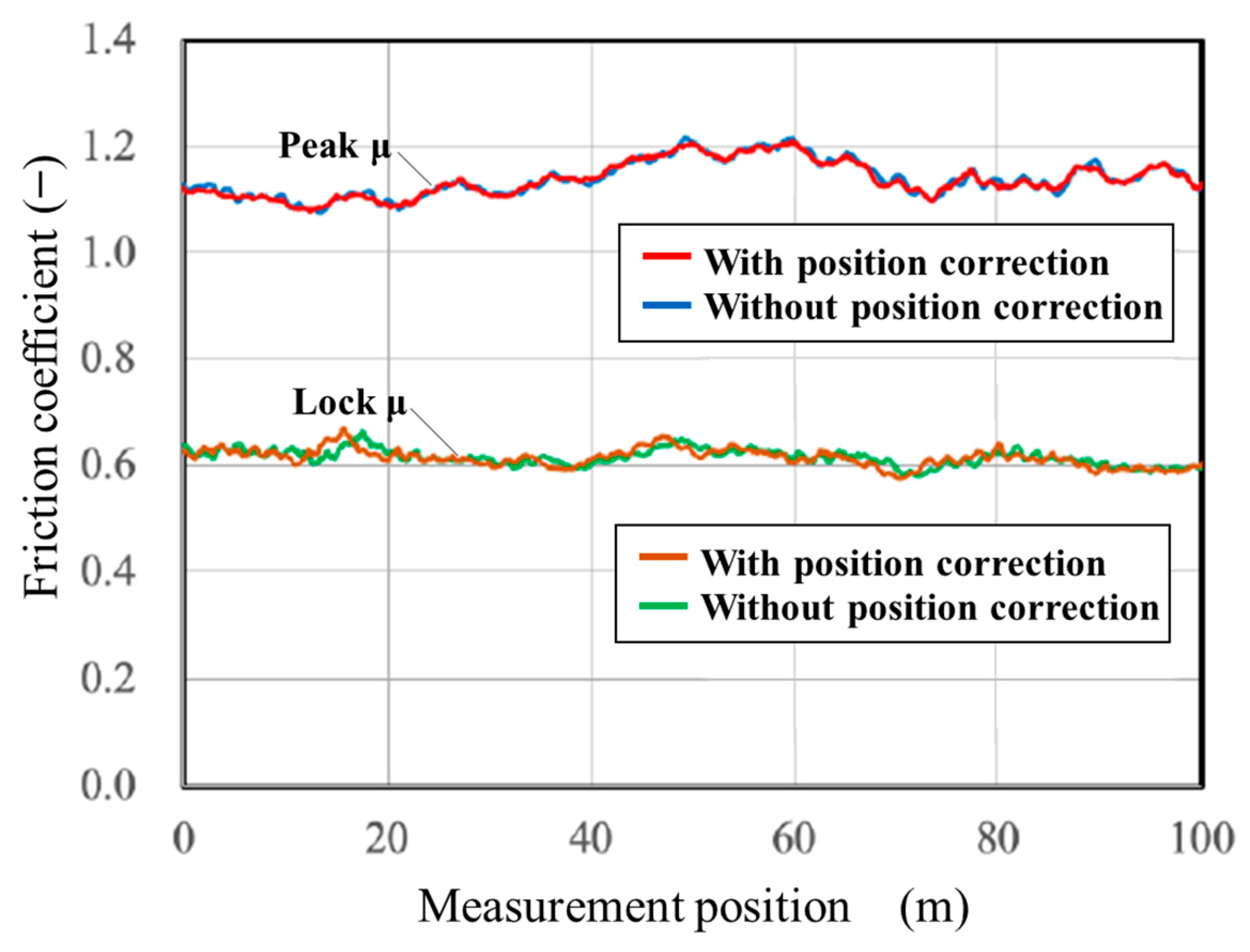
- When applying a road friction coefficient measurement method that depends on the road position, the problem with this measurement system is that the mounting position of each measurement tire is offset in the fore and aft directions. Therefore, we present a method for obtaining the friction coefficient at the same road position by correcting the friction coefficient measured at each tire with respect to distance.
- (3)
- The difference between dry and wet conditions on the road surface was measured at the same position on the road surface. As a result, it was shown that the reduction in the peak μ owing to wet conditions greatly differs depending on the pavement condition. This type of information is essential for improving road traffic safety and developing appropriate measures to mitigate the risks associated with changes in road surface conditions.
- (4)
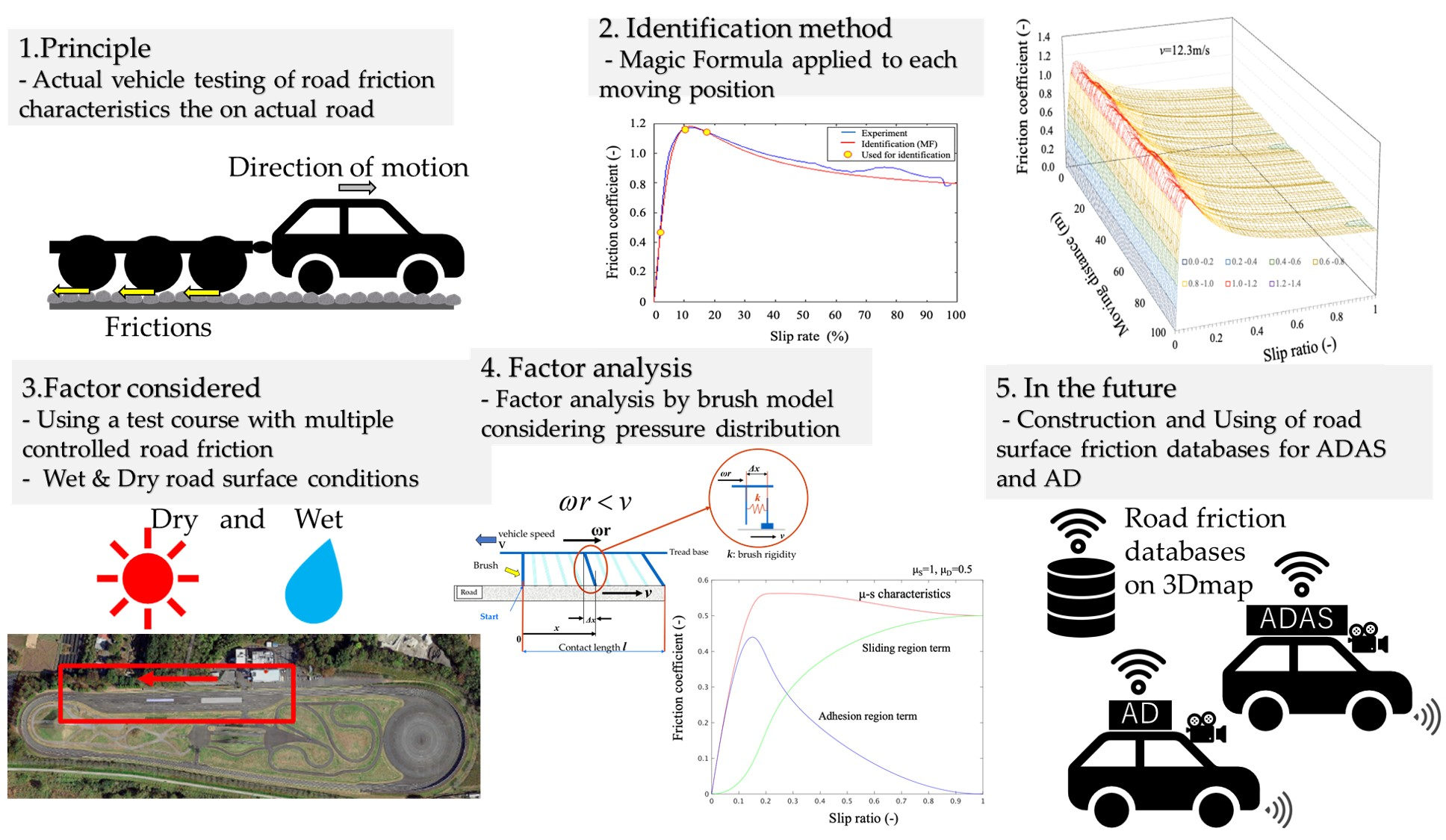
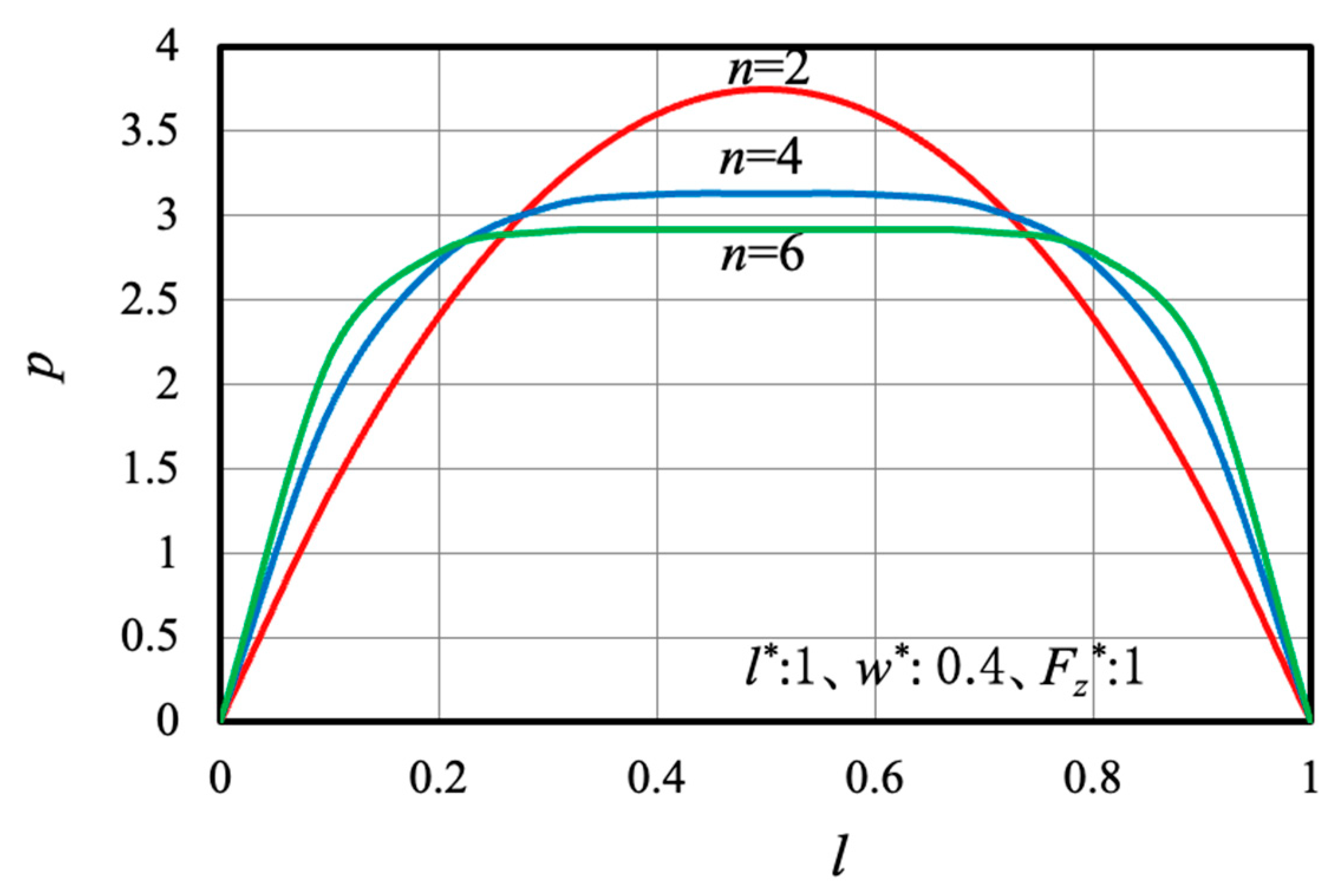
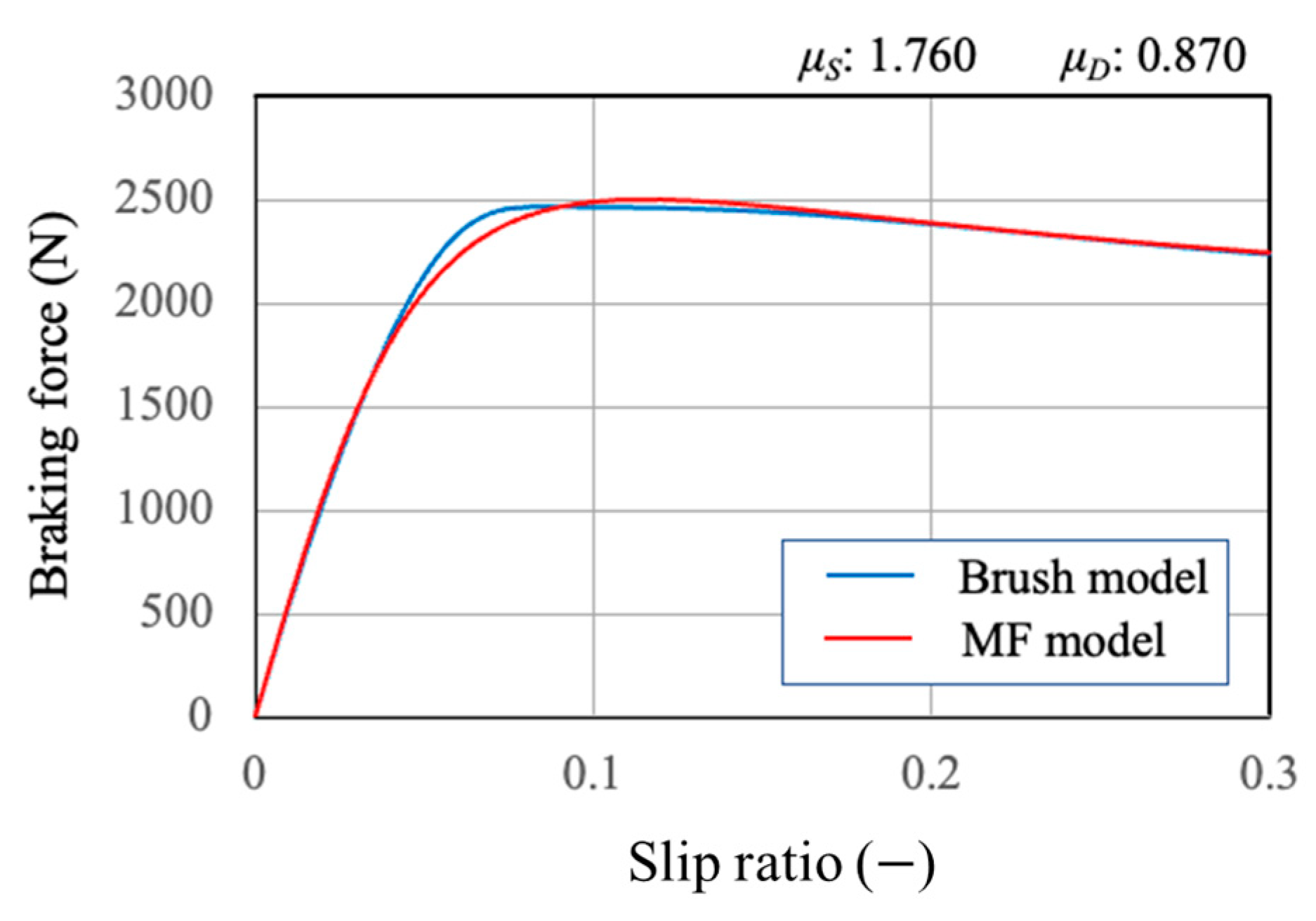
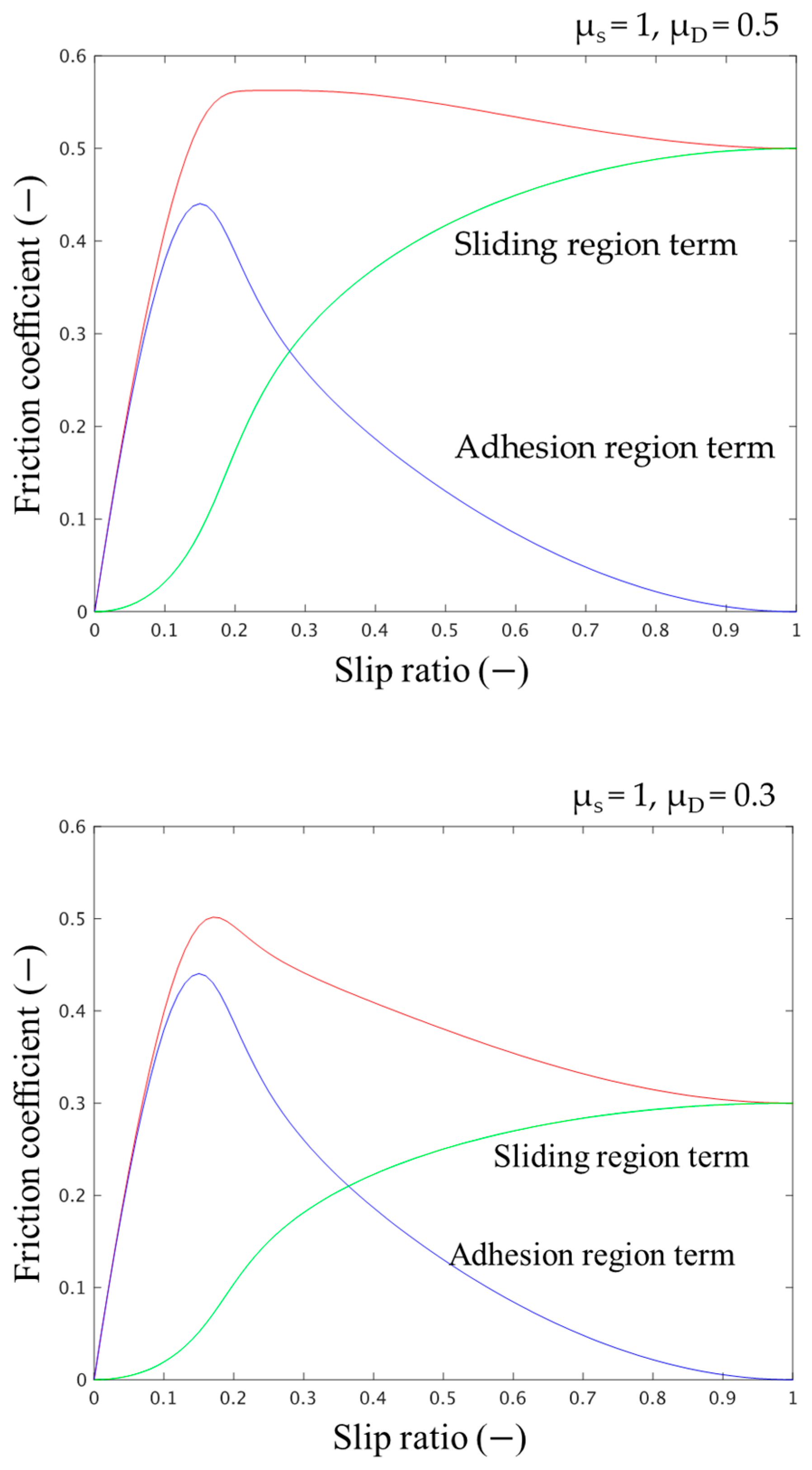
- Based on the results of the braking characteristics identified using the MF, the contact surface pressure was used to express the brush model quantitatively, and the maximum static friction and DF of the actual road surface were estimated. Based on this result, the brush model was used to present the adhesion and sliding region components of the μ–s characteristics, and it was shown to have a significant influence on the μ–s characteristic shape.
- (5)
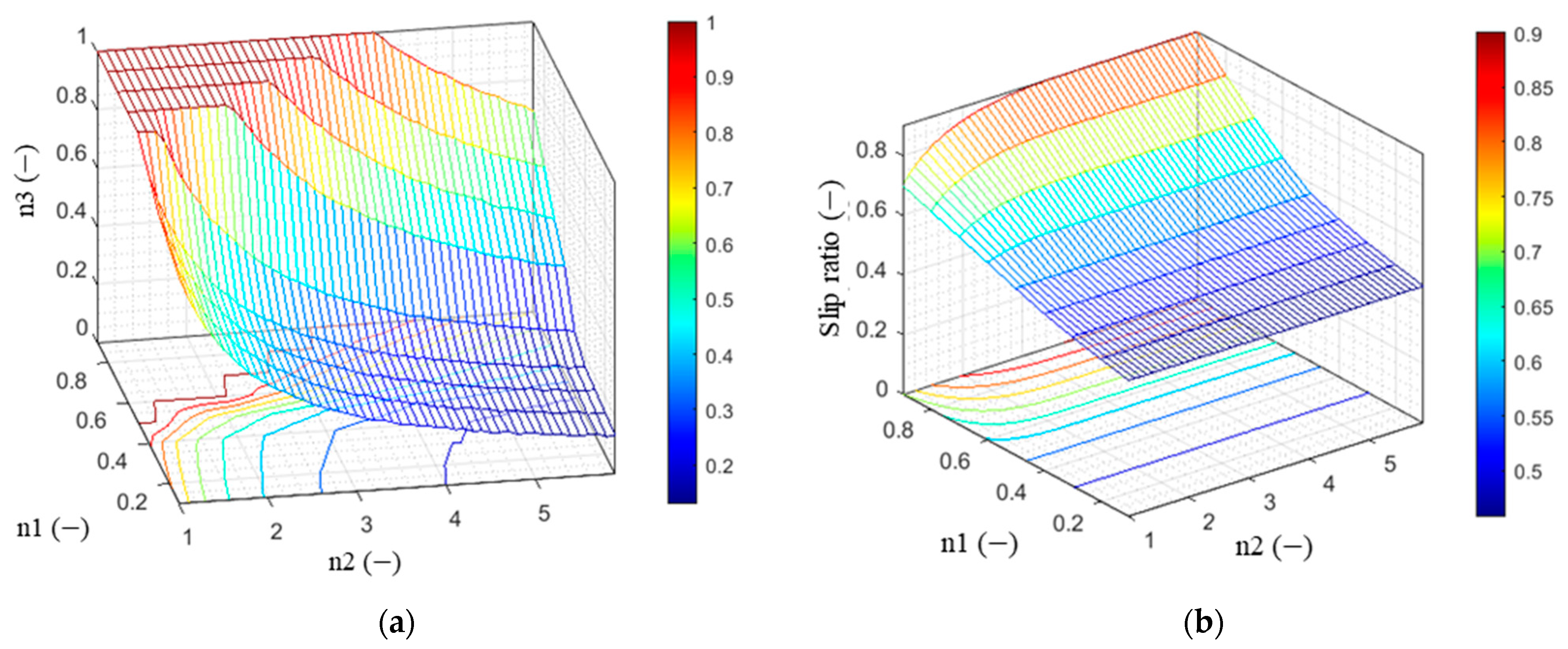
- We standardized and the increasing slope using and showed that they have a significant influence on the peak μ and slip ratios. Consequently, the possibility of estimating the shape of the μ–s characteristics is demonstrated.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Pisano, P.A.; Goodwin, L.C.; Rossetti, M.A. US highway crashes in adverse road weather conditions. In Proceedings of the 24th Conference on International Interactive Information and Processing Systems for Meteorology, Oceanography and Hydrology, New Orleans, LA, USA, 20 January 2008. [Google Scholar]
- Andrey, J.; Yagar, S. A temporal analysis of rain-related crash risk. Accid. Anal. Prev. 1993, 25, 465–472. [Google Scholar] [CrossRef] [PubMed]
- Motomatsu, S.; Yamamoto, M. Characteristics of high-performance pavement and pavement diagnosis technology. J. INCE/J 2001, 25, 122–128. (In Japanese) [Google Scholar] [CrossRef]
- Mataei, B.; Zakeri, H.; Zahedi, M.; Nejad, F.M. Pavement Friction and Skid Resistance Measurement Methods: A Literature Review. Open J. Civ. Eng. 2016, 6, 537–565. [Google Scholar] [CrossRef]
- Brown, E.R.; Hainin, M.; Cooley, A.; Hurley, G. Relationship of Air Voids, Lift Thickness, and Permeability in Hot Mix Asphalt Pavements; National Academies of Sciences, Engineering, and Medicine; The National Academies Press: Washington, DC, USA, 2004. [Google Scholar]
- Yan, B. Experimental Study on Wet Skid Resistance of Asphalt Pavements in Icy Conditions. Materials 2019, 12, 1201. [Google Scholar] [CrossRef] [PubMed]
- Christina, P. Quantification of skid resistance seasonal variation in asphalt pavements. J. Traffic Transp. Eng. 2020, 7, 237–248. [Google Scholar]
- Khalfghian, S.; Emami, A.; Taheri, S. A Technical Survey on tire-road friction estimation. Friction 2017, 5, 123–146. [Google Scholar] [CrossRef]
- Watanabe, K.; Kageyama, I.; Kuriyagawa, Y. A Study on Construction of Estimation Algorithm for Road Conditions; The Japan Socity of Mechanical Engineers: Tokyo, Japan, 2002; TRANSLOG 11th, No. 02-50; pp. 71–74. (In Japanese) [Google Scholar]
- Watanabe, K.; Kageyama, I.; Kuriyagawa, Y. Study on Construction of Estimation Algorithm for Coefficient of Road Friction; The Japan Socity of Mechanical Engineers: Tokyo, Japan, 2003; TRANSLOG 12th, No. 03-51; pp. 45–48. (In Japanese) [Google Scholar]
- Alonso, J.; Lopez, J.M.; Pavon, I.; Recuero, M.; Asensio, C.; Arcas, G.; Bravo, A. On-board wet road surface identification using tire/road noise and Support Vector Machines. Appl. Acoust. 2014, 76, 407–415. [Google Scholar] [CrossRef]
- Ise, T. Study on Tactile Sensors for Tires that Can Measure the Friction State of the Driving Surface. Ph.D. Thesis, Kanazawa University, Ishikawa, Japan, 2015. (In Japanese). [Google Scholar]
- Morinaga, H.; Wakao, Y.; Hanatsuka, Y.; Kobayakawa, A. The Possibility of Intelligent Tire (Technology of Contact Area Information Sensing); FISITA2006, Transactions; JSAE: Tokyo, Japan, 2006; Volume F2006V104, pp. 1–11. [Google Scholar]
- Morinaga, H.; Hanatsuka, Y.; Wakao, Y. Sensing Technology Tire System for Road Surface Condition Judgment. FISITA2010 Trans. 2010, F2010E010, 1–8. Available online: https://cir.nii.ac.jp/crid/1572543025664202752 (accessed on 11 May 2023).
- Tuononen, A.J. Optical position detection to measure trye carcass. Veh. Syst. Dyn. 2008, 46, 471–481. [Google Scholar] [CrossRef]
- Bakker, E.; Nyborg, L.; Pacejka, H.B. Tyre Modelling for Use in Vehicle Dynamics Studies; SAE Paper No. 870421; SAE International: Warrendale, PA, USA, 1987. [Google Scholar]
- Tielking, J.T.; Fancher, P.S.; Wild, R.E. Mechanical Properties of Truck Tires; SAE Paper No.730183; SAE International: Warrendale, PA, USA, 1973. [Google Scholar]
- Tezuka, Y.; Ishii, H.; Kiyota, S. Application of the Magic Formula Tire Model to Motorcycle Maneuverability Analysis. JSAE Rev. 2001, 22, 305–310. [Google Scholar] [CrossRef]
- Pacejka, H.B.; Bakker, E. The Magic Formula Tire Model. Int. J. Veh. Mech. Mobil. 1992, 21, 1–18. [Google Scholar]
- Pacejka, H.B.; Besselink, I.J.M. Magic Formula Tire Model with Transient Properties. Int. J. Veh. Mech. Mobil. 1997, 27, 234–249. [Google Scholar]
- Pacejka, H.B. Tire and Vehicle Dynamics; Butterworth-Heinemann: Oxford, UK, 2005. [Google Scholar]
- Fiala, E. Seitenkraefte am rollenden Luftreifen (Lateral forces acting on pneumatic tire). Ver. Dtsch. Ing. –VDI Z. 1954, 96, 973–979. [Google Scholar]
- Svendenius, J.; Wittenmark, B. Brush tire model with increased flexibility. In Proceedings of the 2003 European Control Conference (ECC), Cambridge, UK, 1–4 September 2003. [Google Scholar]
- Jacob, S. Wheel Model Review and Friction Estimation, Technical Report TFRT—7607–SE; Department of Automatic Control, LTH Studiecentrum: Lund, Sweden, 2003. [Google Scholar]
- O’Neill, A. Enhancing brush tire model accuracy through friction measurements. Int. J. Veh. Mech. Mobil. 2022, 60, 2075–2097. [Google Scholar]
- Lu, Q.; Steven, B. Friction Testing of Pavement Preservation Treatments: Literature Review. UCPRC-TM-2006-10. Compare. 1971. Available online: https://escholarship.org/uc/item/3jn462tc (accessed on 11 May 2023).
- Liew, T.H. New Apparatus for Skid Testing: Assessment for Dusty Surfaces (Malaysia: Universiti Teknologi Malaysia). 2002. Available online: eprints.utm.my/id/eprint/5808/1/71937.pdf (accessed on 11 May 2023).
- Abe, Y. Development and Use of Portable Slip Resistance Measuring Devices for Road Surfaces. Ph.D. Thesis, Muroran Institute of Technology, Hokkaido, Japan, 2000. (In Japanese). [Google Scholar]
- Zaid, N.B.M.; Hainin, M.R.; Idham, M.K.; Warid, M.N.M.; Naqibah, S.N. Evaluation of Skid Resistance Performance Using British Pendulum and Grip Tester. IOP Conf. Ser. Earth Environ. Sci. 2019, 220, 012016. [Google Scholar] [CrossRef]
- Kageyama, I.; Kuriyagawa, Y.; Haraguchi, T.; Kaneko, T.; Asai, M.; Matsumoto, G. Study on the Road Friction Database for Automated Driving: Fundamental Consideration of the Measuring Device for the Road Friction Database. Appl. Sci. 2021, 12, 18. [Google Scholar] [CrossRef]
- Kageyama, I.; Kuriyagawa, Y.; Haraguchi, T.; Kaneko, T.; Nishio, M.; Watanabe, A. Study on Road Friction Database for Traffic Safety: Construction of a Road Friction-Measuring Device. Inventions 2022, 7, 90. [Google Scholar] [CrossRef]
- Kageyama, I.; Kuriyagawa, Y.; Haraguchi, T.; Kaneko, T.; Nishio, M.; Watanabe, A.; Matsumoto, G. Study on Evaluation of Road Friction Characteristics on Ordinary Roads. Trans. Soc. Automot. Eng. Jpn. 2023, 54, 594–601. (In Japanese). Available online: https://cir.nii.ac.jp/crid/1390014735381153792 (accessed on 11 May 2023).
- Kageyama, I.; Kuriyagawa, Y.; Haraguchi, T.; Kaneko, T.; Asai, M.; Tahira, S.; Matsumoto, G. Study on Measurement of Road Friction Characteristics and Estimation Method for Tire Characteristics—Relationship between Longitudinal and Lateral Forces. Trans. Soc. Automot. Eng. Jpn. 2022, 53, 213–218. (In Japanese). Available online: https://www.safetylit.org/citations/index.php?fuseaction=citations.viewdetails&citationIds[]=citjournalarticle_742701_29 (accessed on 11 May 2023).
- Sakai, H. Tire Engineering; Guranpuri-Shuppan: Tokyo, Japan, 1987; p. 120. (In Japanese) [Google Scholar]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Peak μ | Lock μ | μ–s Characteristics | Continuity | Velocity Dependence | |
|---|---|---|---|---|---|
| Trailer tester Bus tester | 〇 | 〇 | 〇 | × | 〇 |
| Grip tester | △ | × | × | 〇 | 〇 |
| BP tester | × | 〇 | × | × | × |
| DF tester | × | 〇 | × | × | 〇 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Watanabe, A.; Kageyama, I.; Kuriyagawa, Y.; Haraguchi, T.; Kaneko, T.; Nishio, M. Study on the Influence of Environmental Conditions on Road Friction Characteristics. Lubricants 2023, 11, 277. https://doi.org/10.3390/lubricants11070277
Watanabe A, Kageyama I, Kuriyagawa Y, Haraguchi T, Kaneko T, Nishio M. Study on the Influence of Environmental Conditions on Road Friction Characteristics. Lubricants. 2023; 11(7):277. https://doi.org/10.3390/lubricants11070277
Chicago/Turabian StyleWatanabe, Atsushi, Ichiro Kageyama, Yukiyo Kuriyagawa, Tetsunori Haraguchi, Tetsuya Kaneko, and Minoru Nishio. 2023. "Study on the Influence of Environmental Conditions on Road Friction Characteristics" Lubricants 11, no. 7: 277. https://doi.org/10.3390/lubricants11070277
APA StyleWatanabe, A., Kageyama, I., Kuriyagawa, Y., Haraguchi, T., Kaneko, T., & Nishio, M. (2023). Study on the Influence of Environmental Conditions on Road Friction Characteristics. Lubricants, 11(7), 277. https://doi.org/10.3390/lubricants11070277