The Influences of Different Parameters on the Static and Dynamic Performances of the Aerostatic Bearing



 ,
,
Abstract
1. Introduction
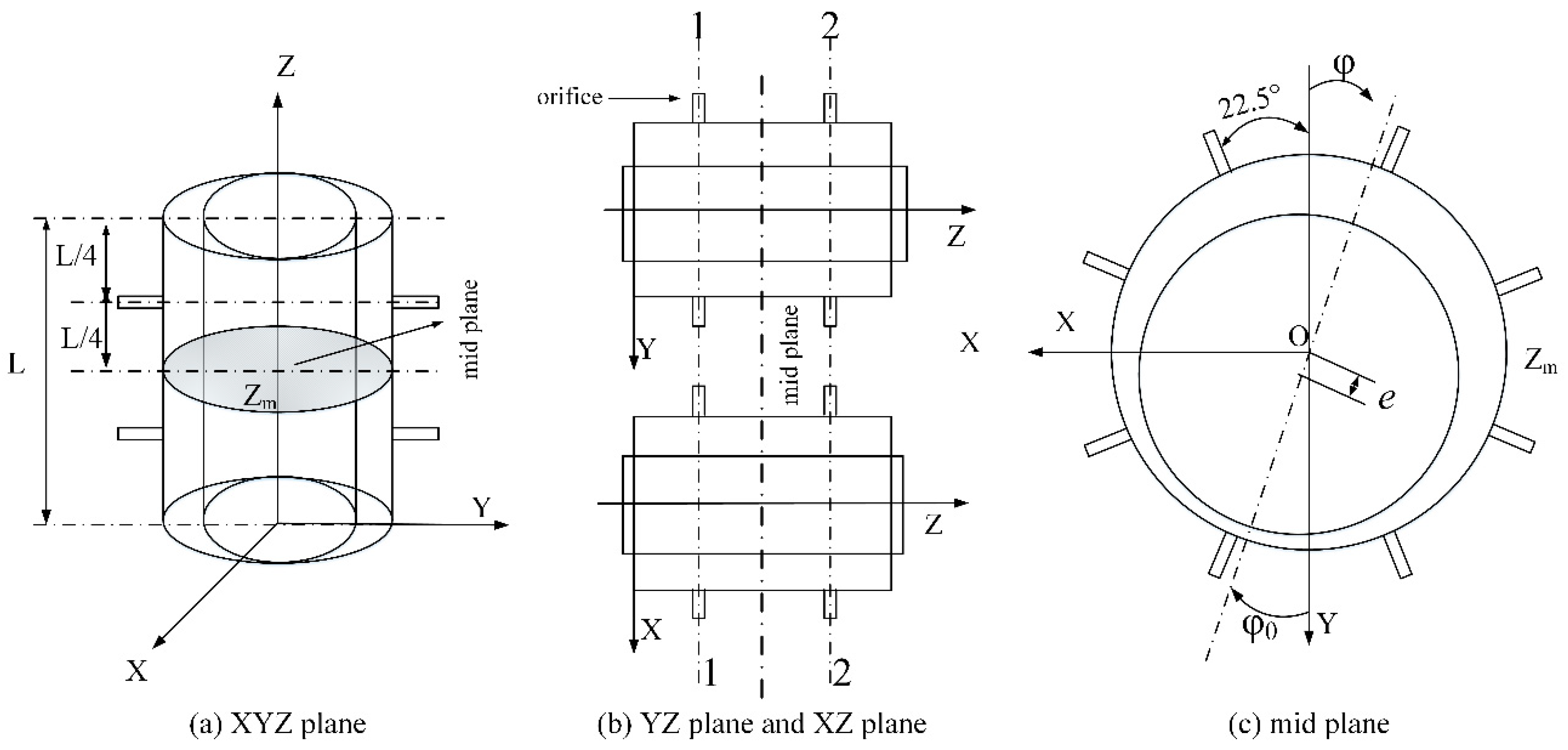
2. Mathematical Model
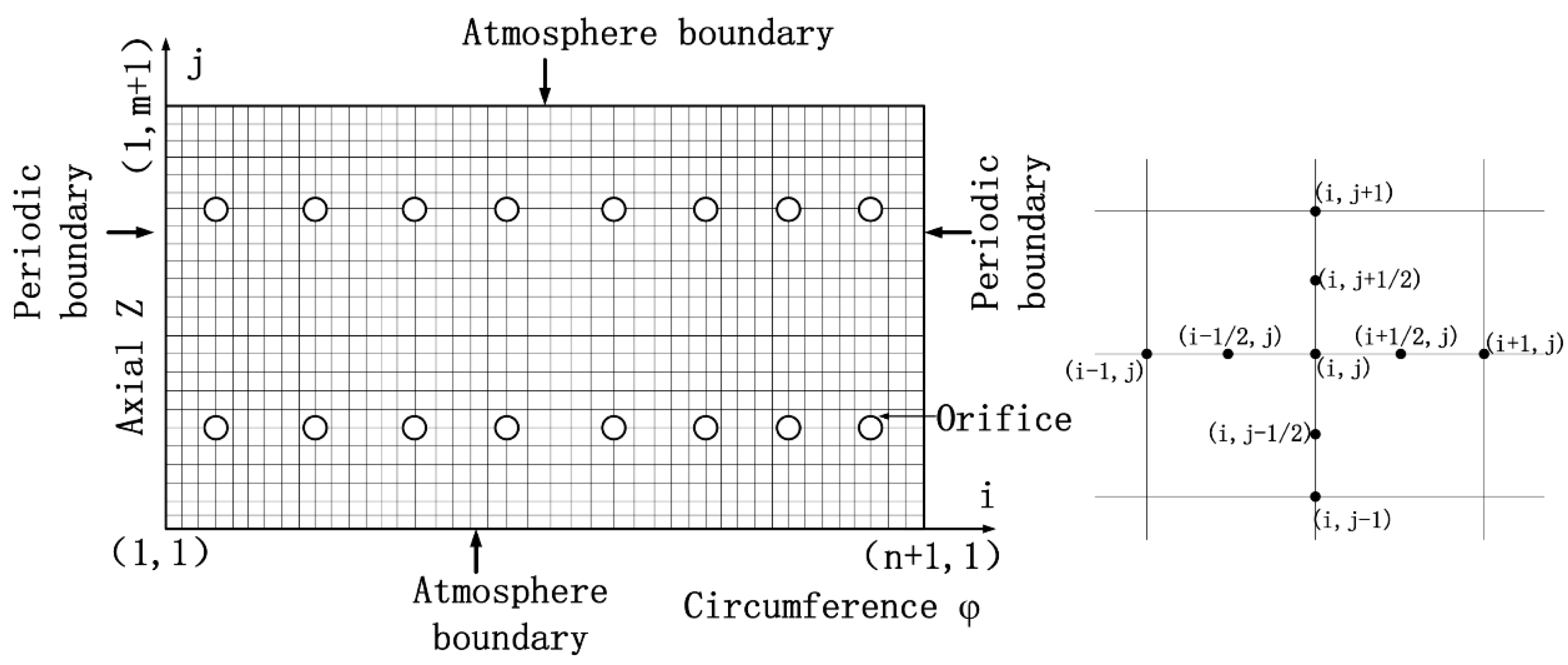
2.1. Reynolds Equation
2.2. Static Characteristics
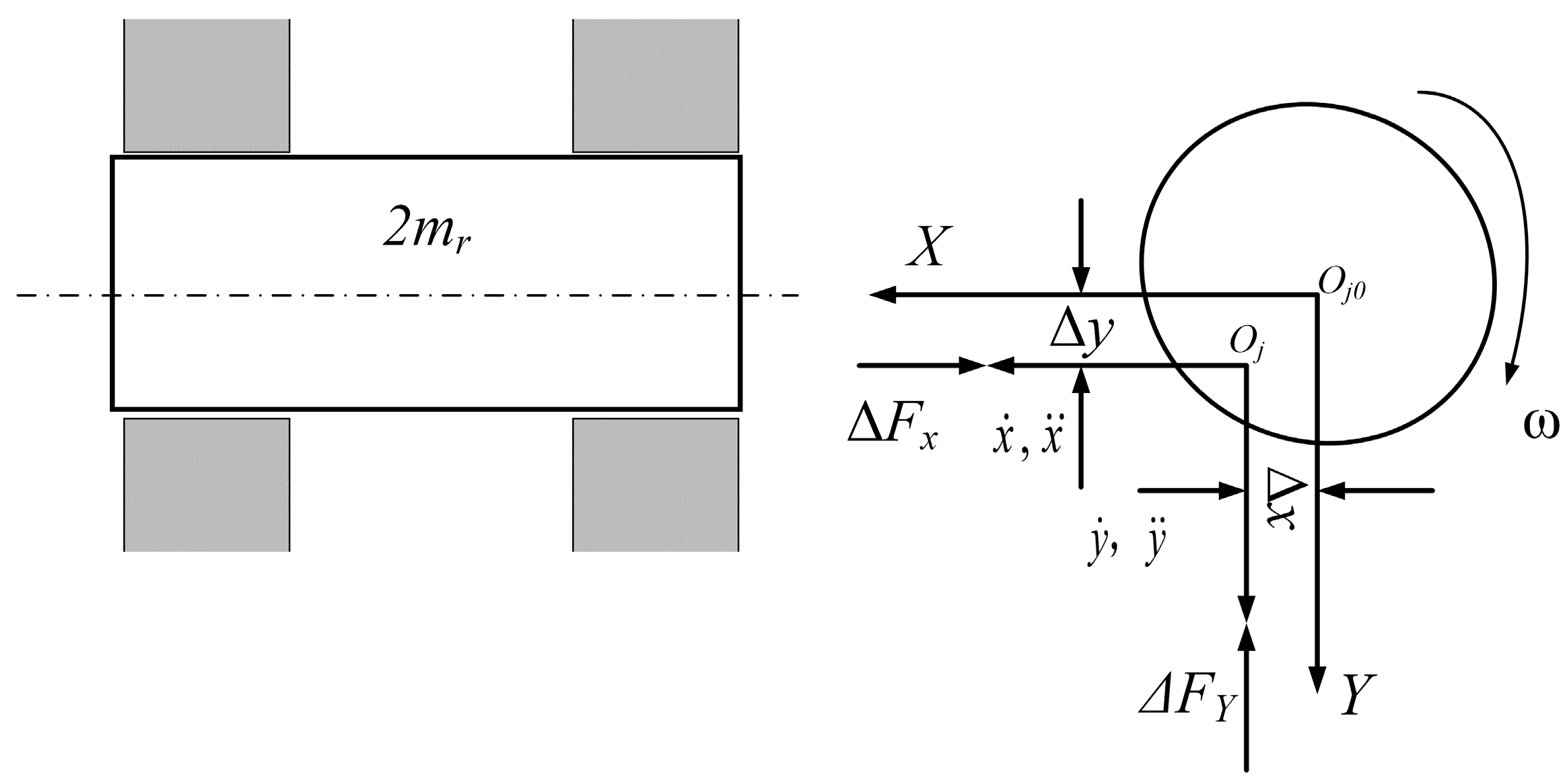
2.3. Dynamic Coefficients
2.4. Whirl Instability Analysis
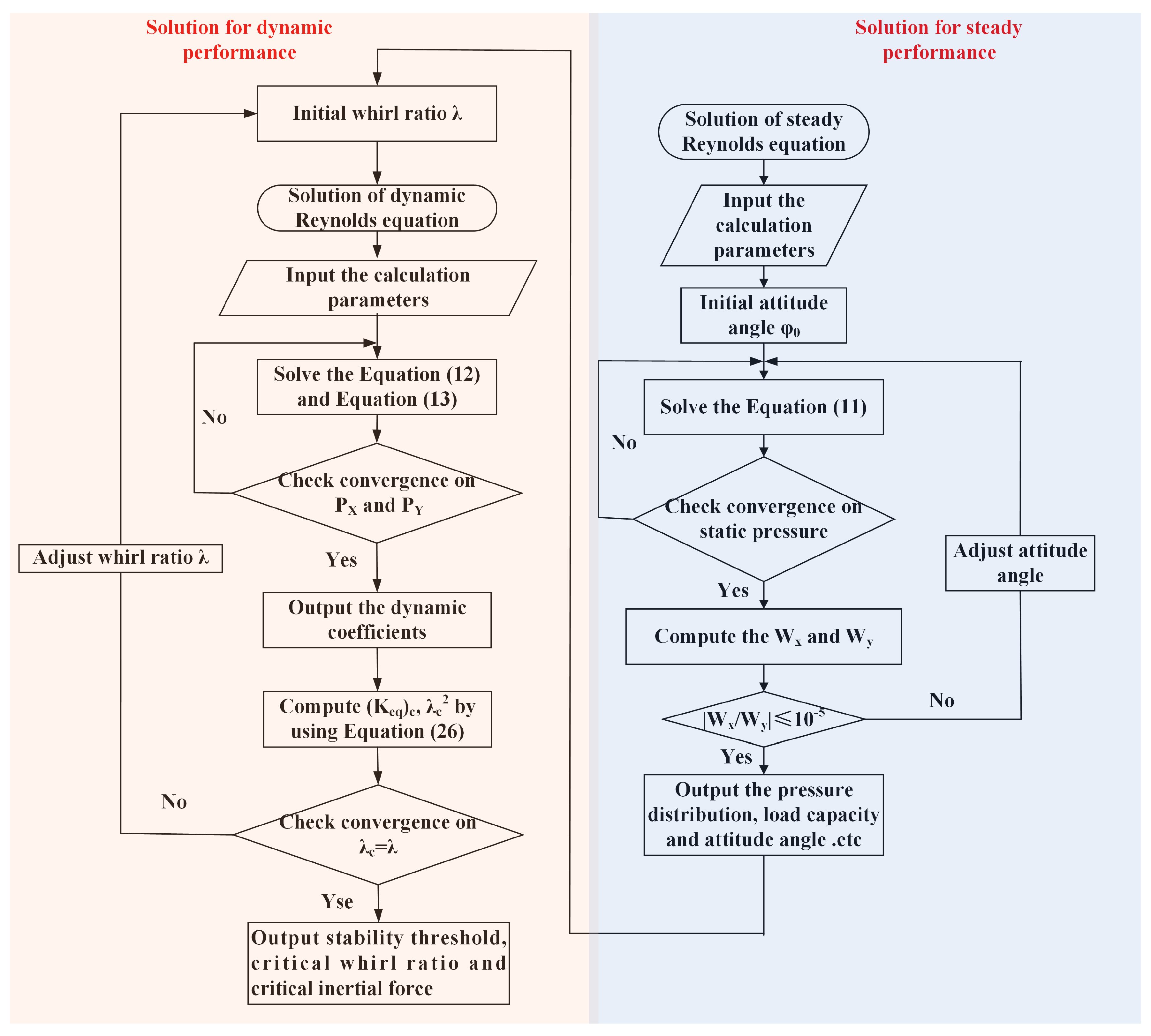
2.5. The Flow Chart of the Solution of the Reynolds Equations
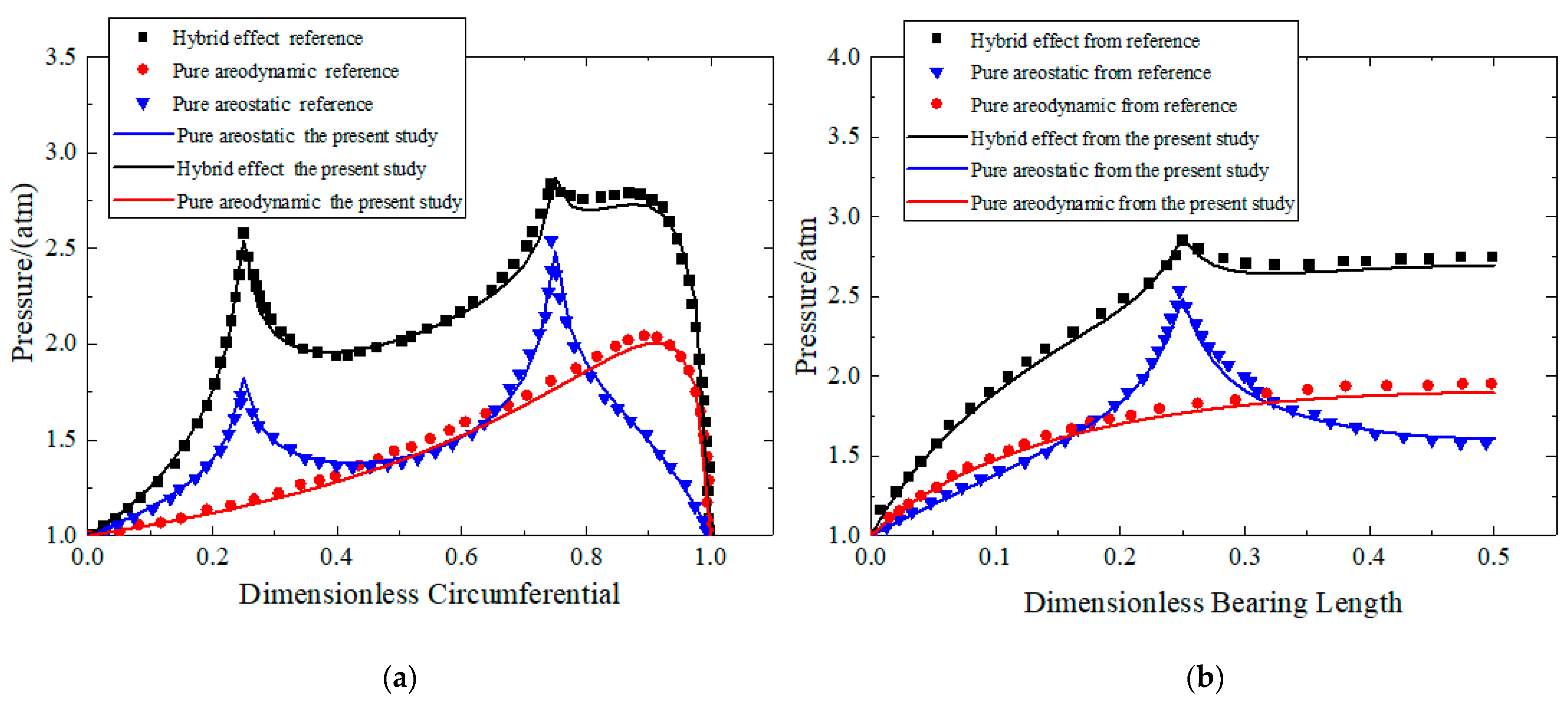
2.6. The Verification of the Solution for the Reynolds Equation
3. Results and Discussion
3.1. Static Performances
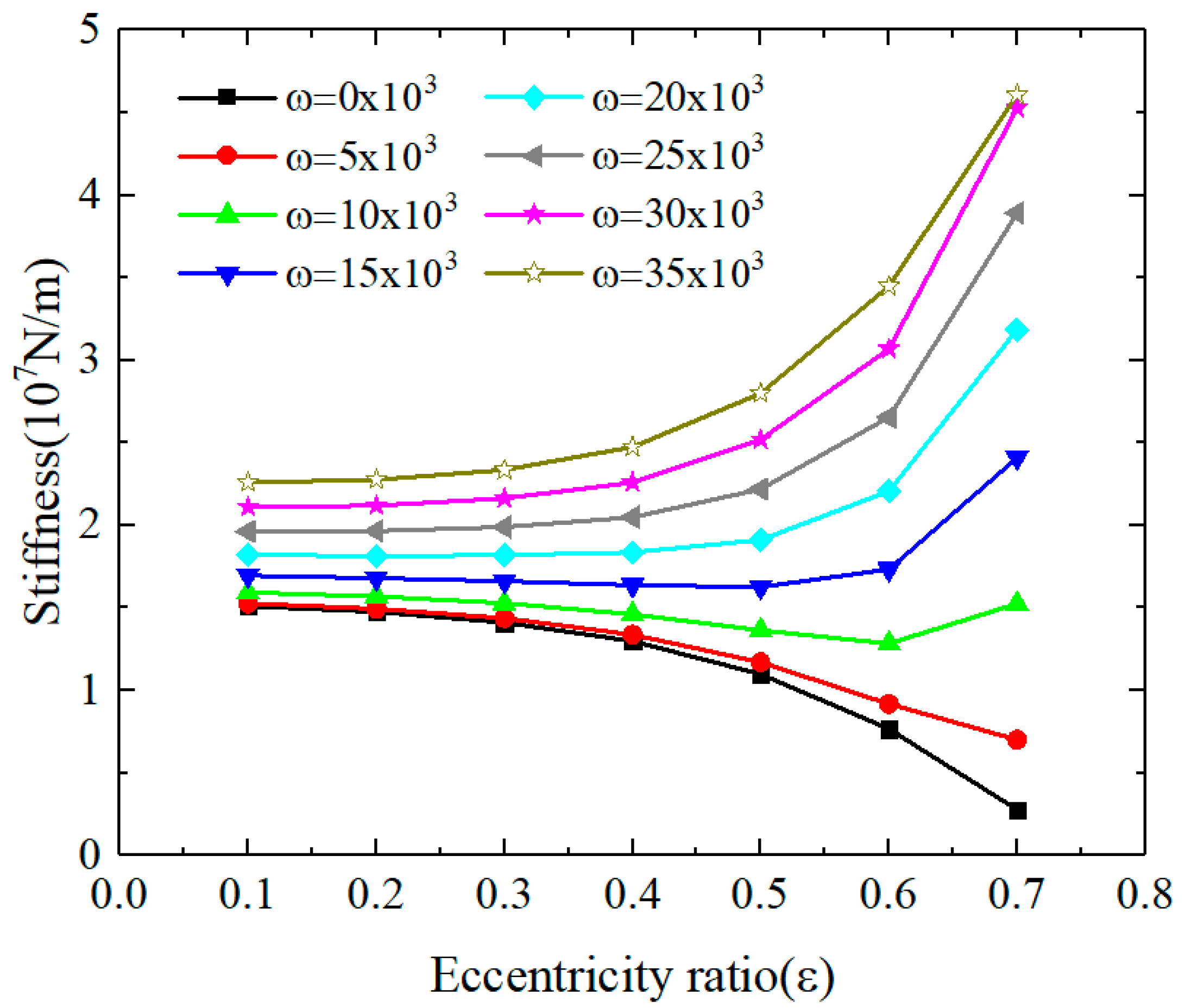
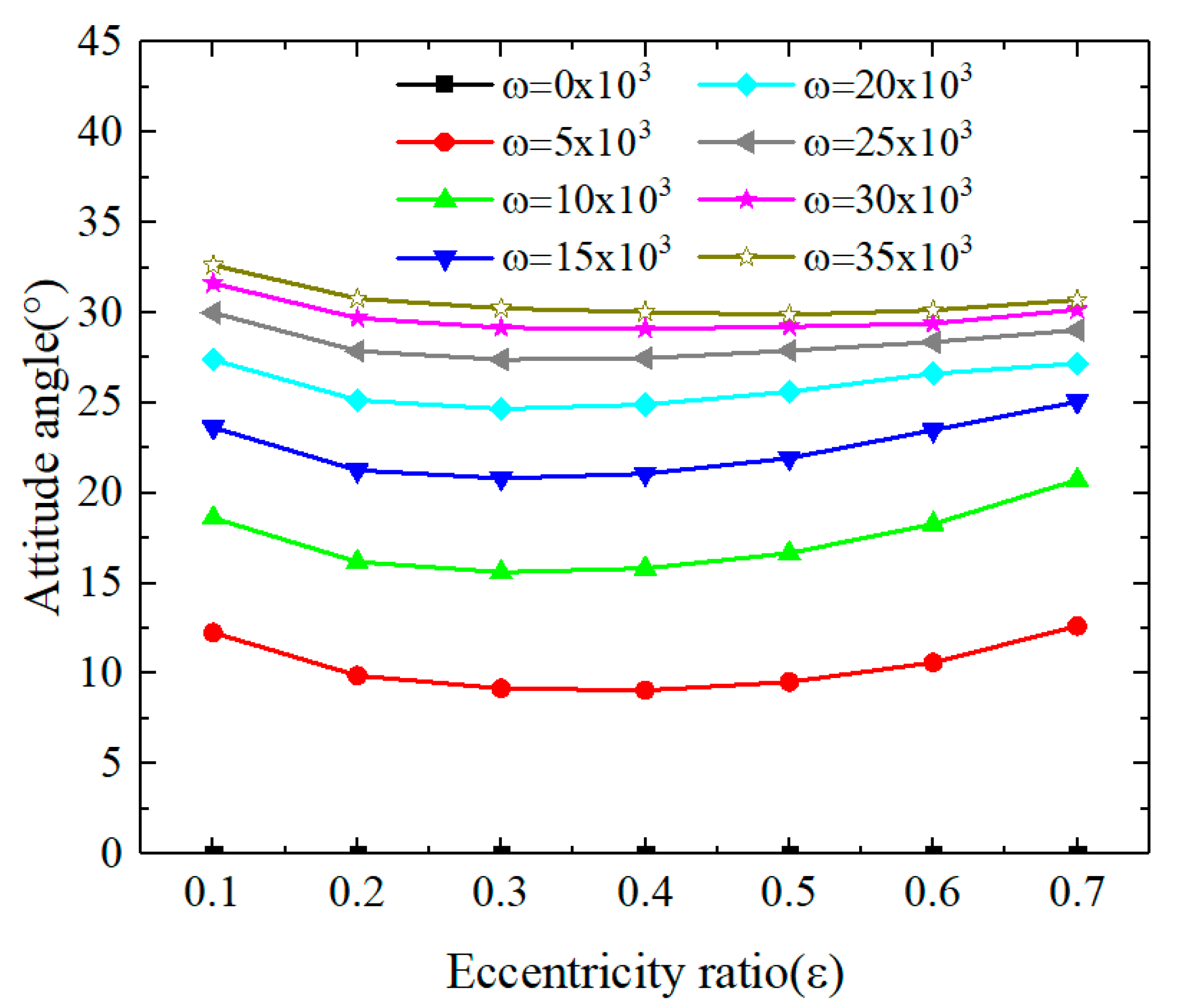
3.1.1. The Influences of Rotational Speed and Eccentricity
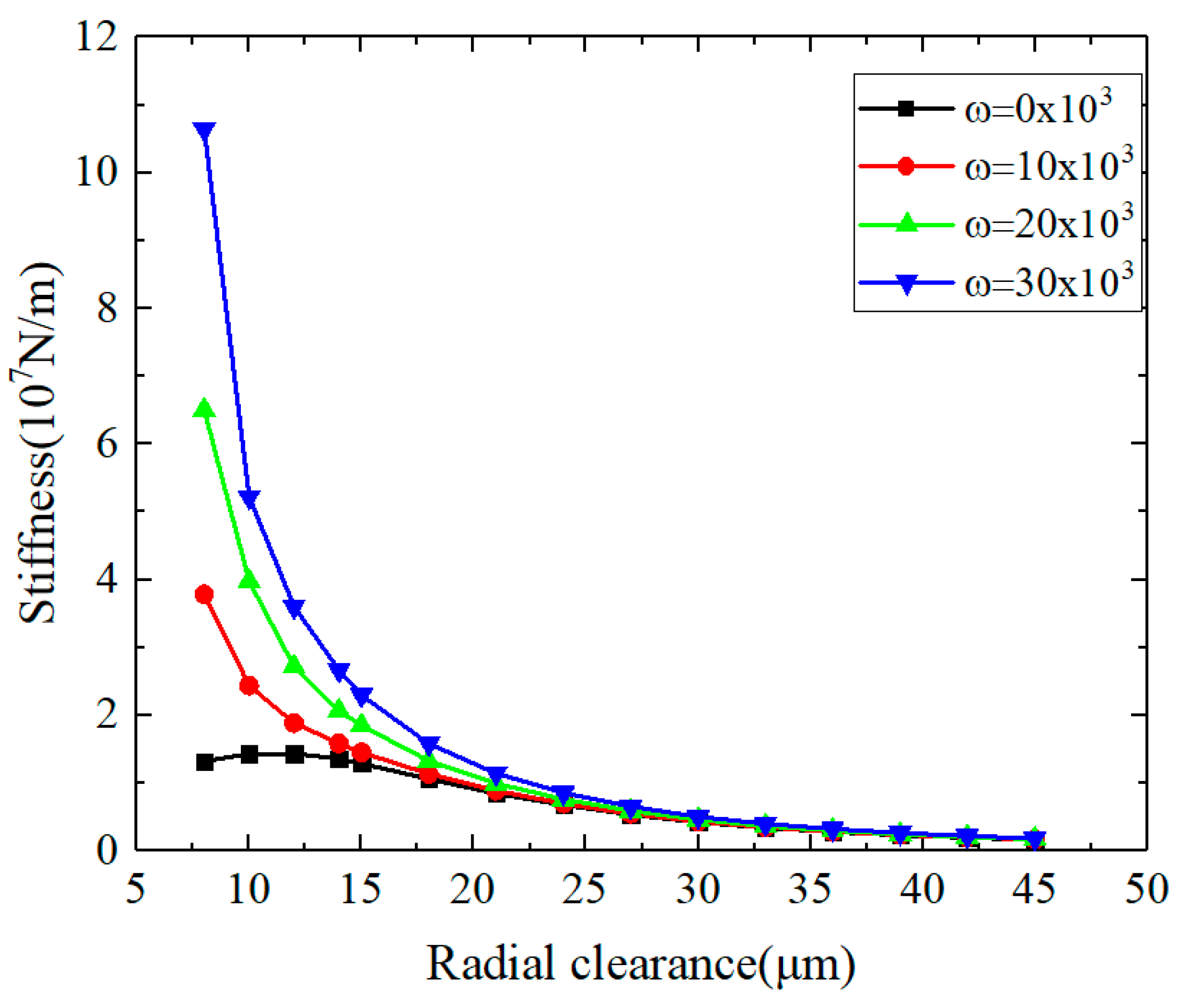
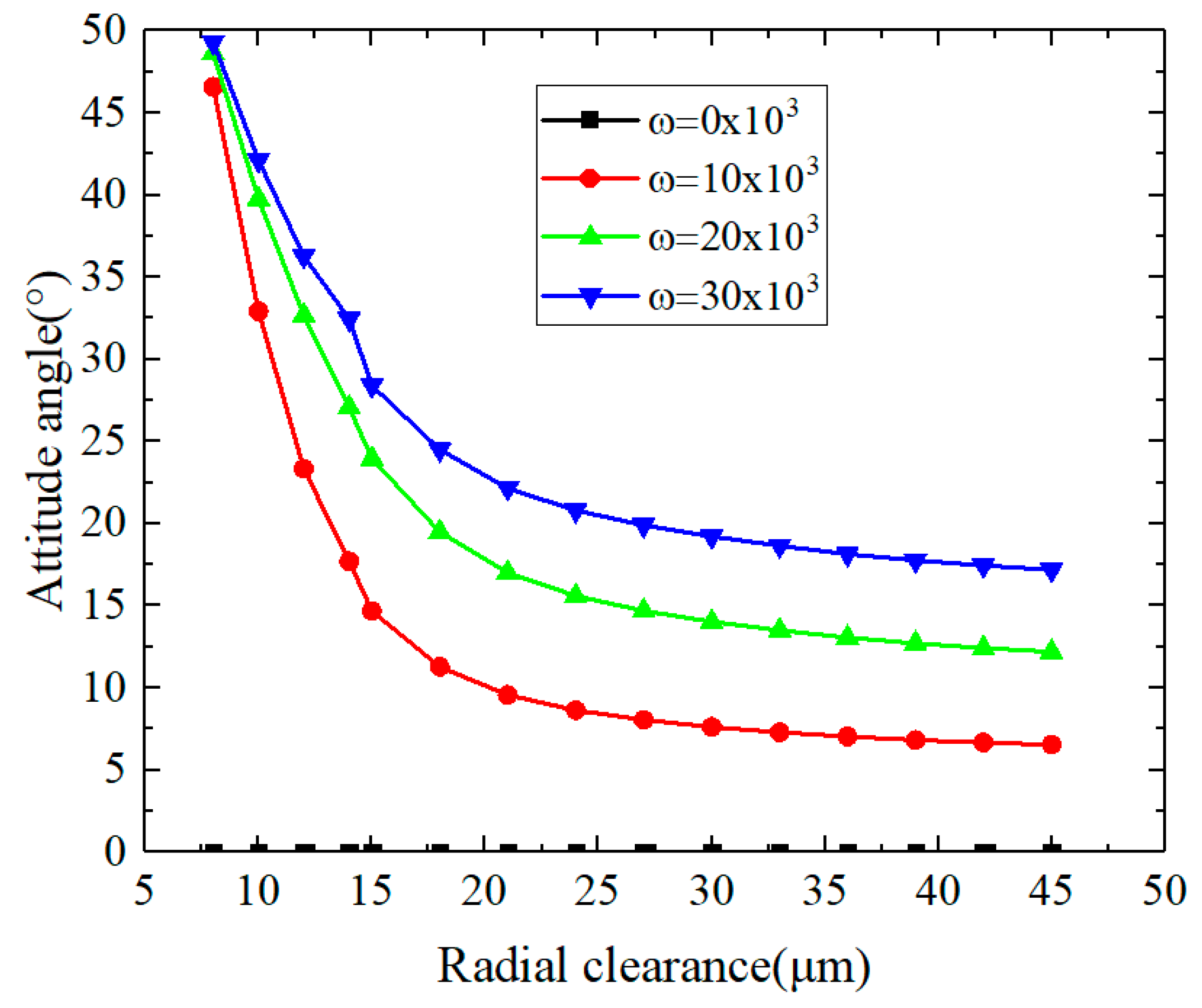
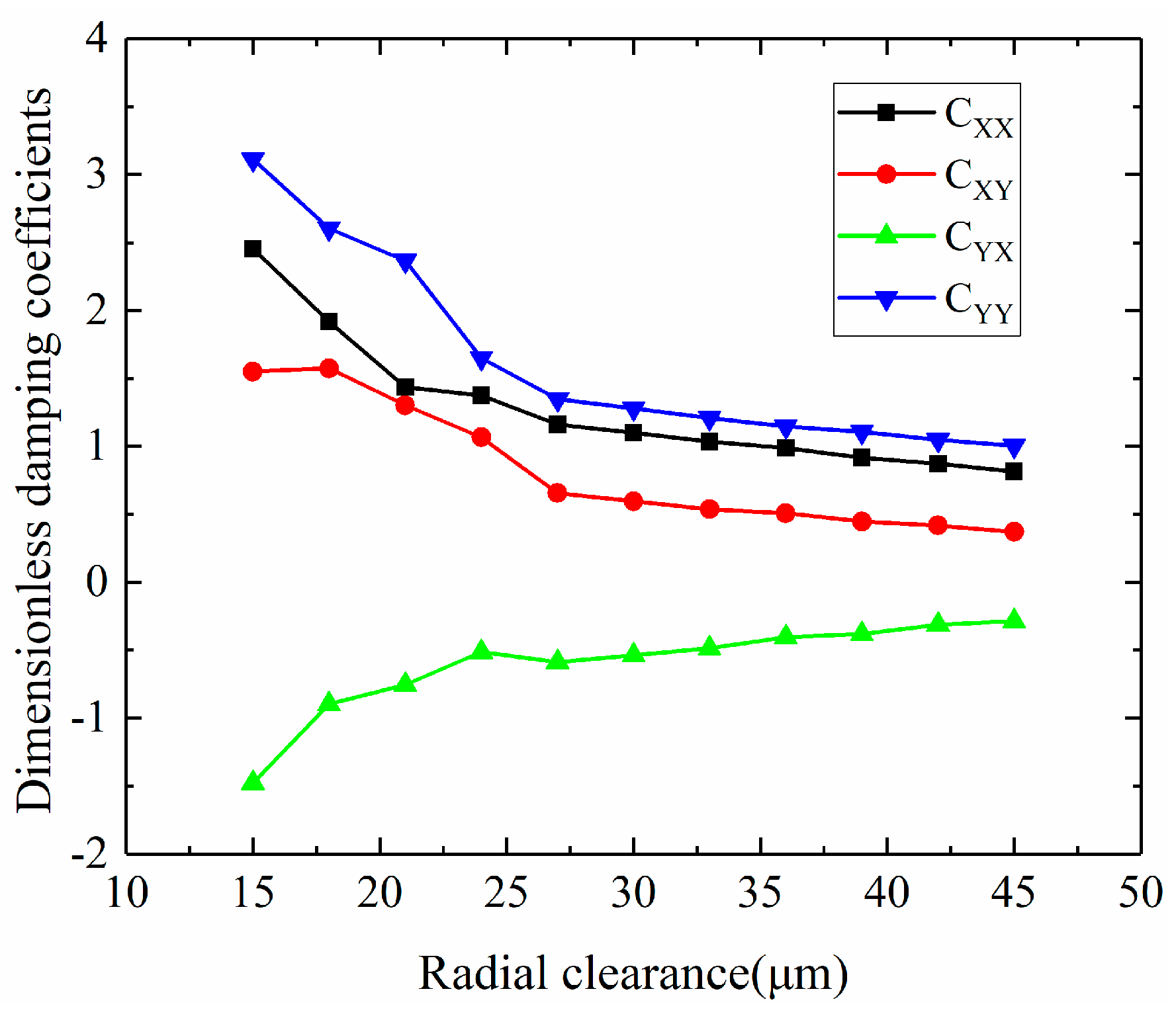
3.1.2. The Influences of Gas Film Radial Clearance
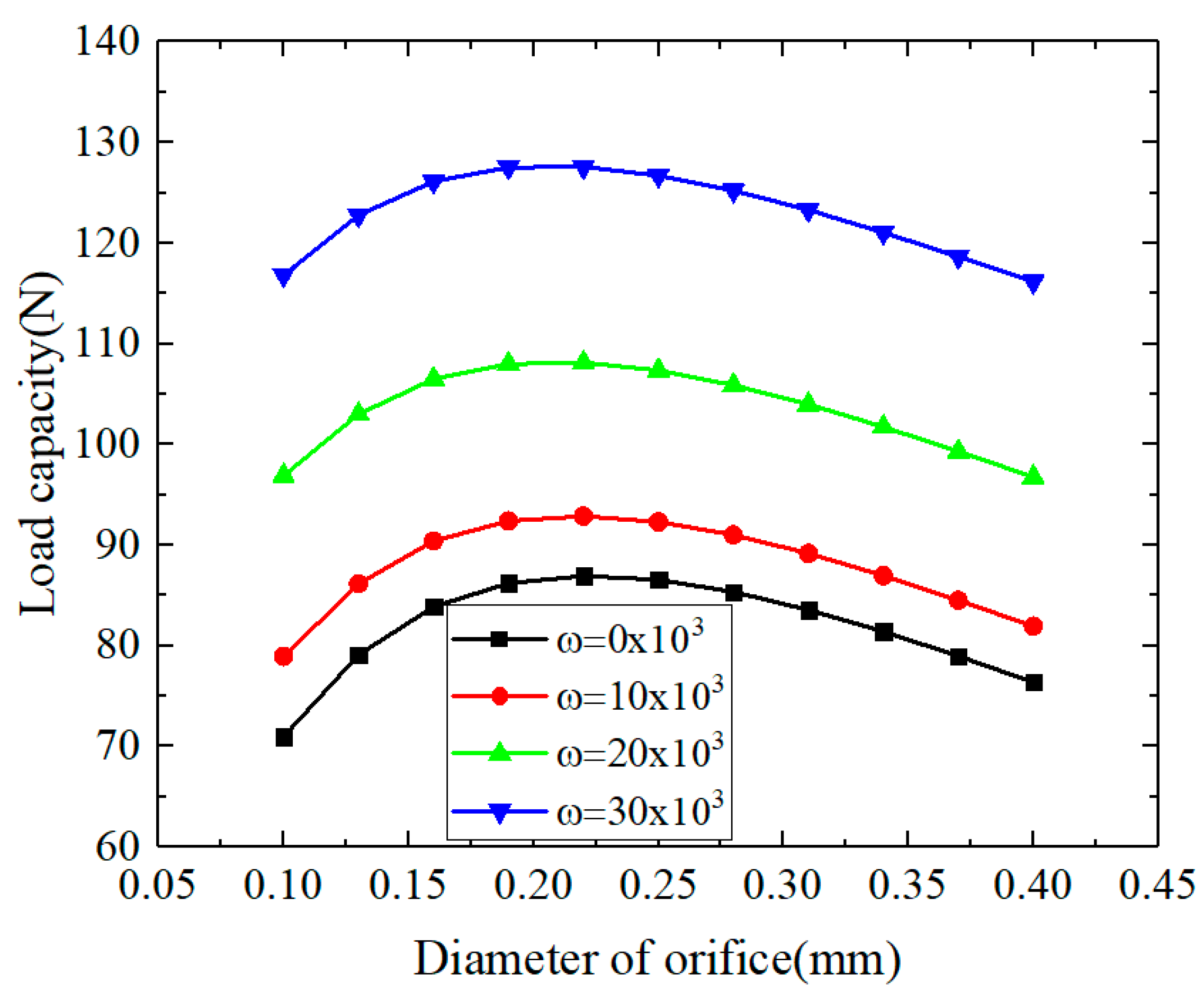
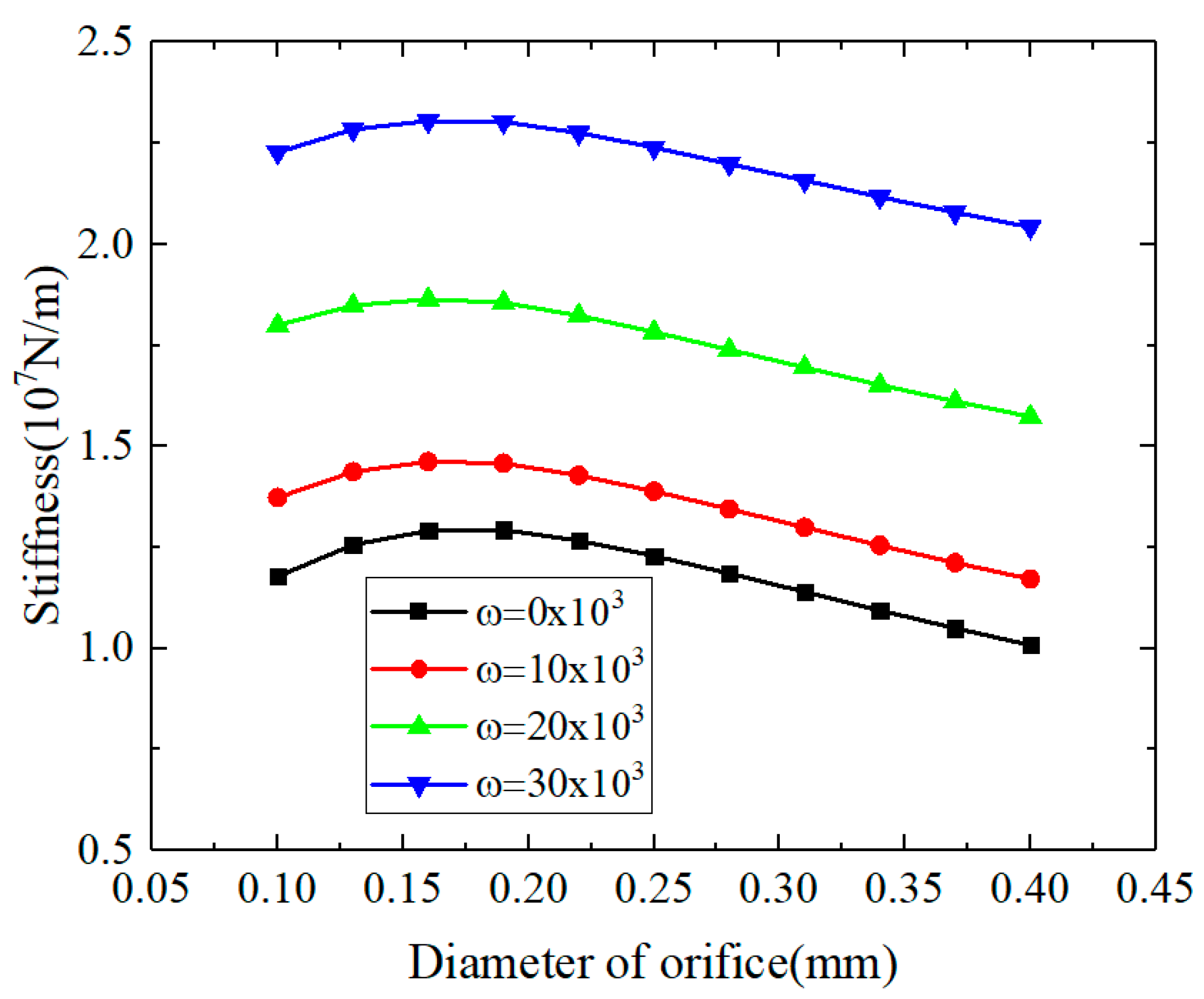
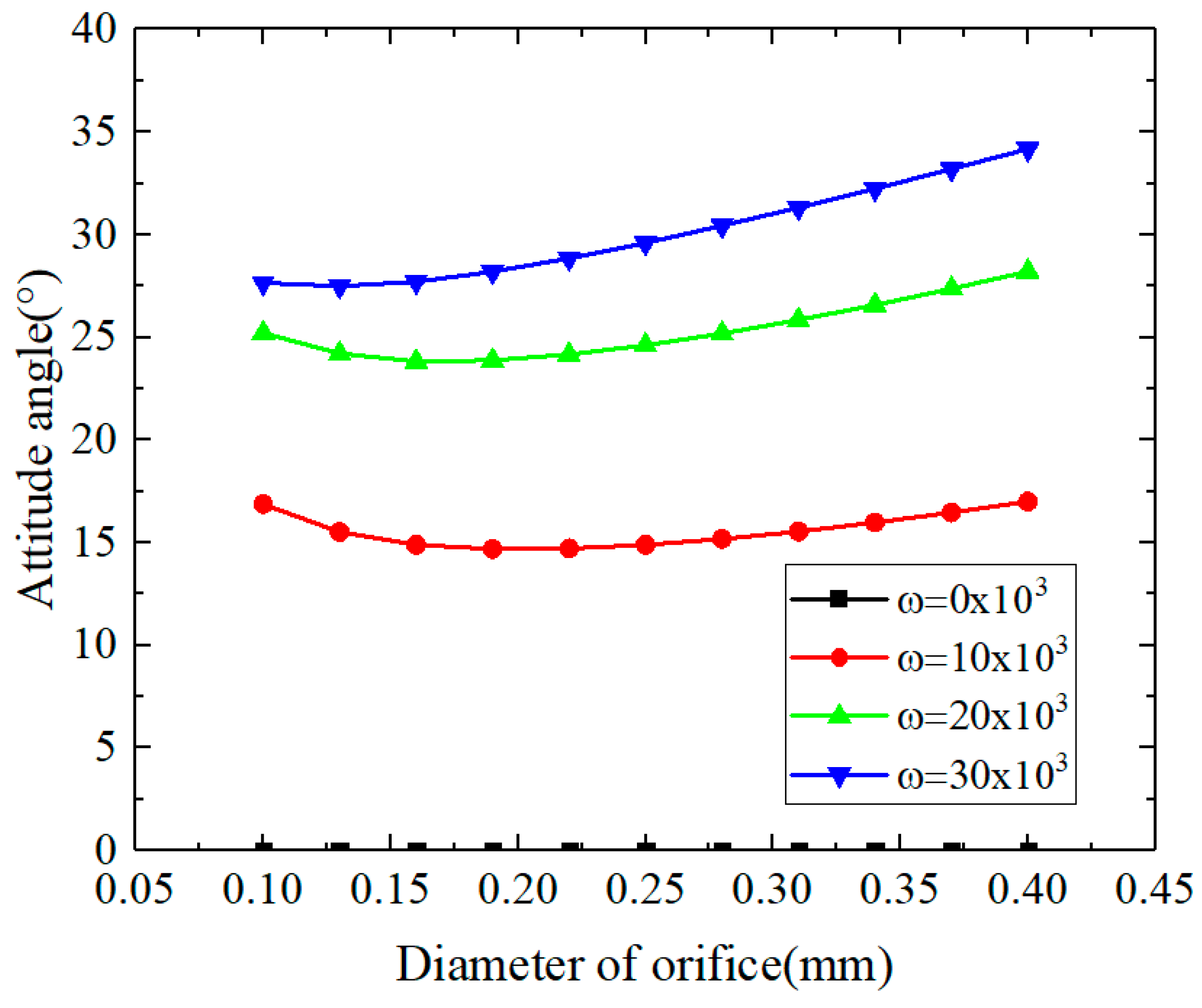
3.1.3. The Influences of Orifice Diameter
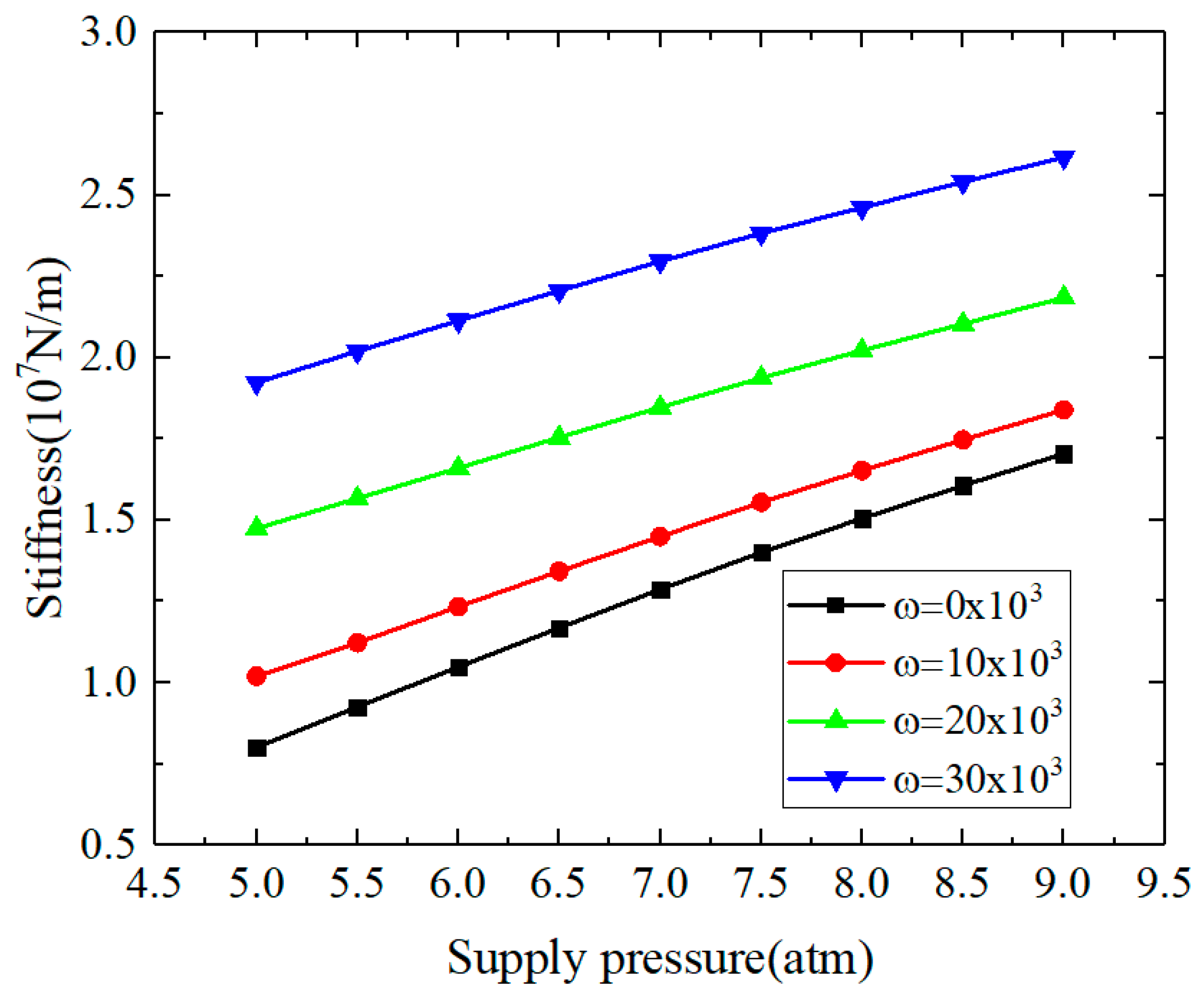
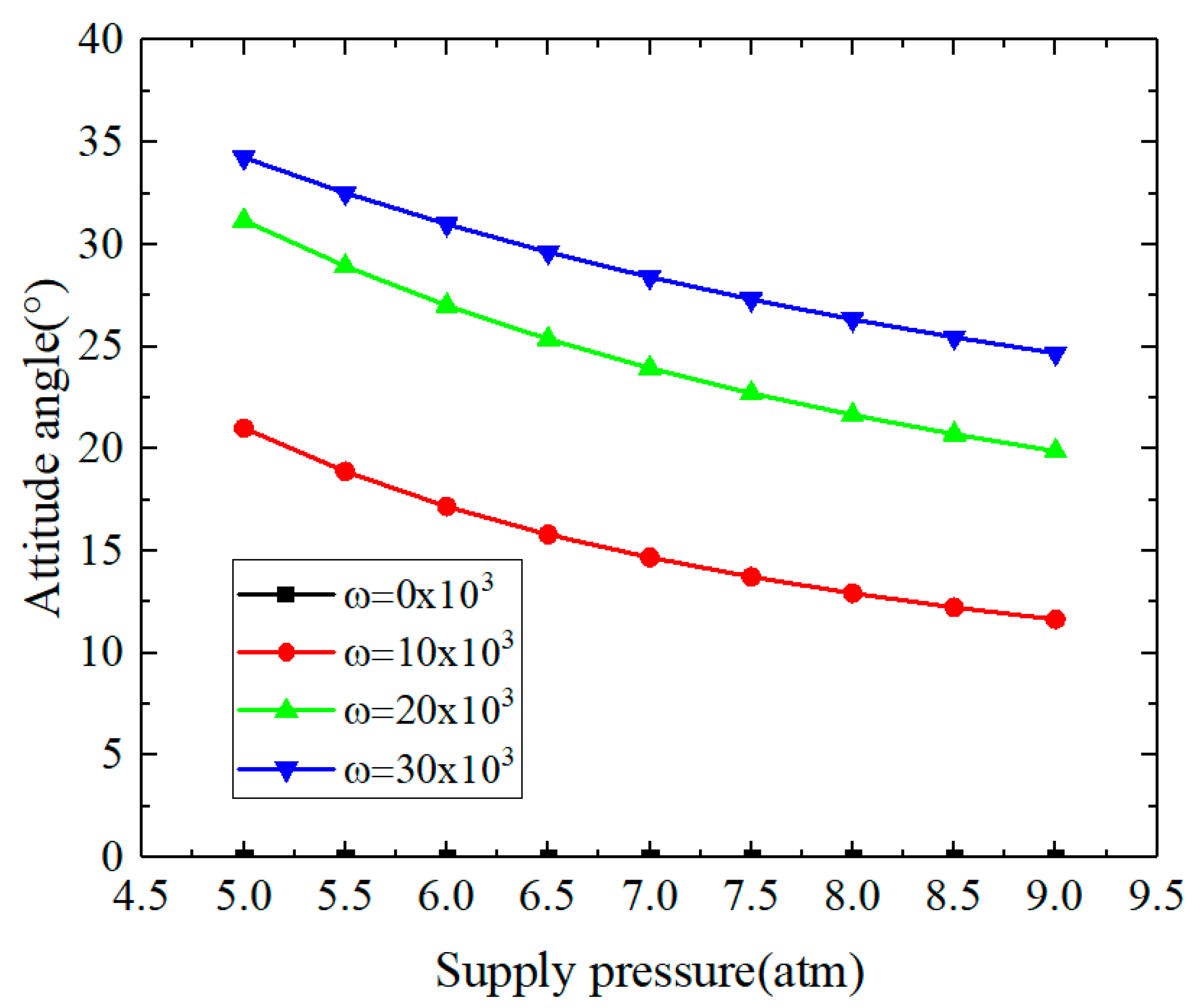
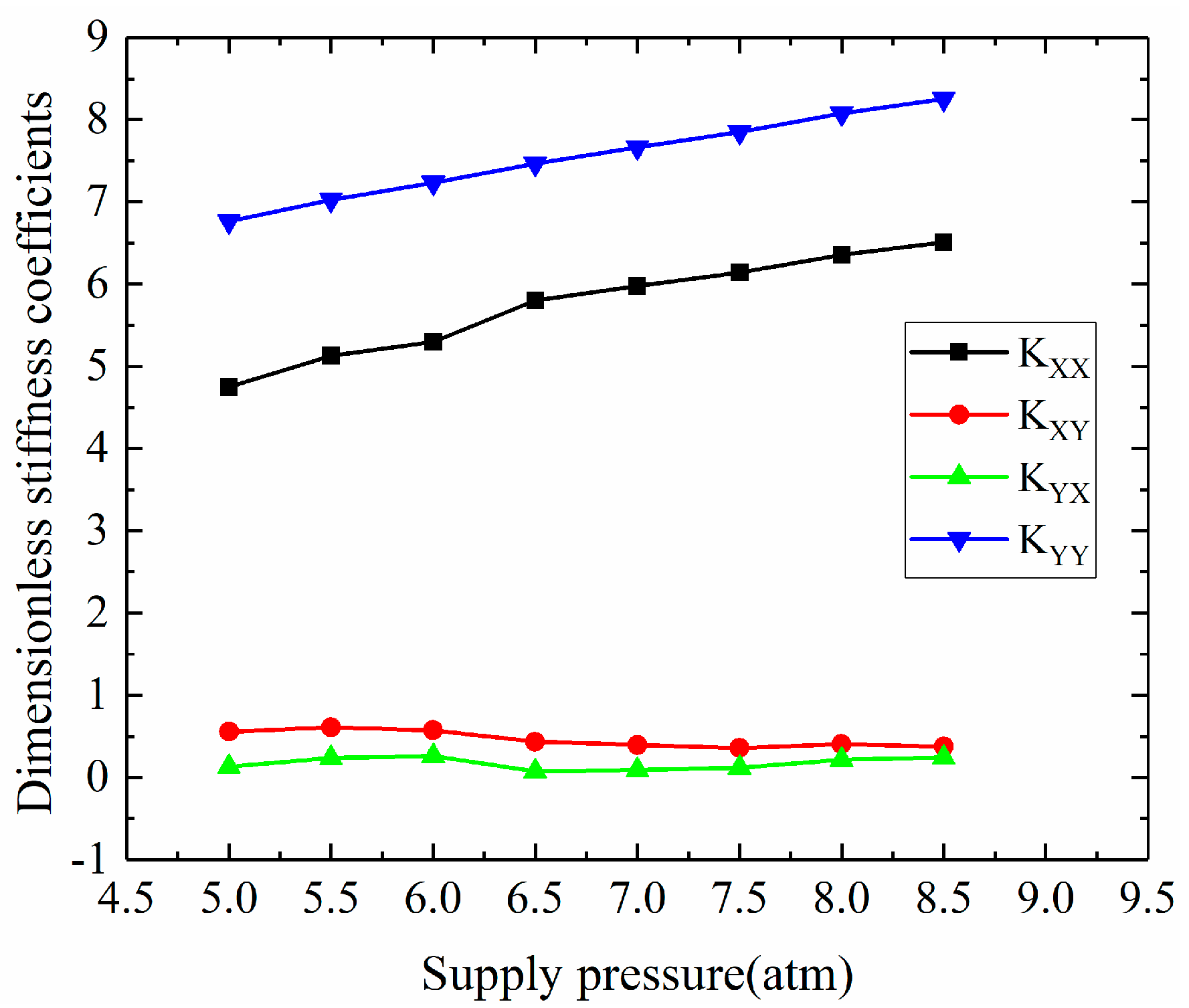
3.1.4. The Influences of Supply Pressure
3.2. Dynamic Performances
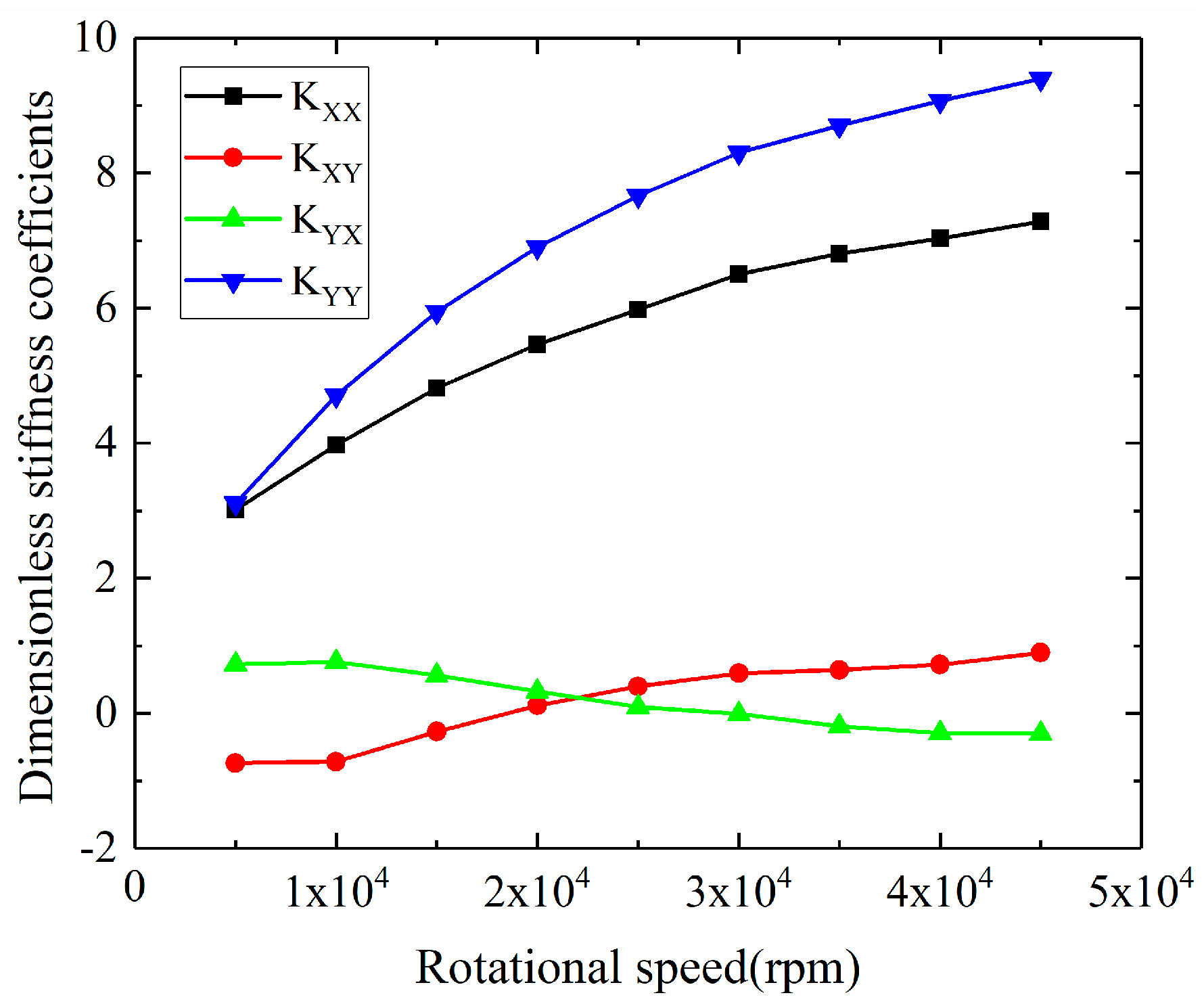
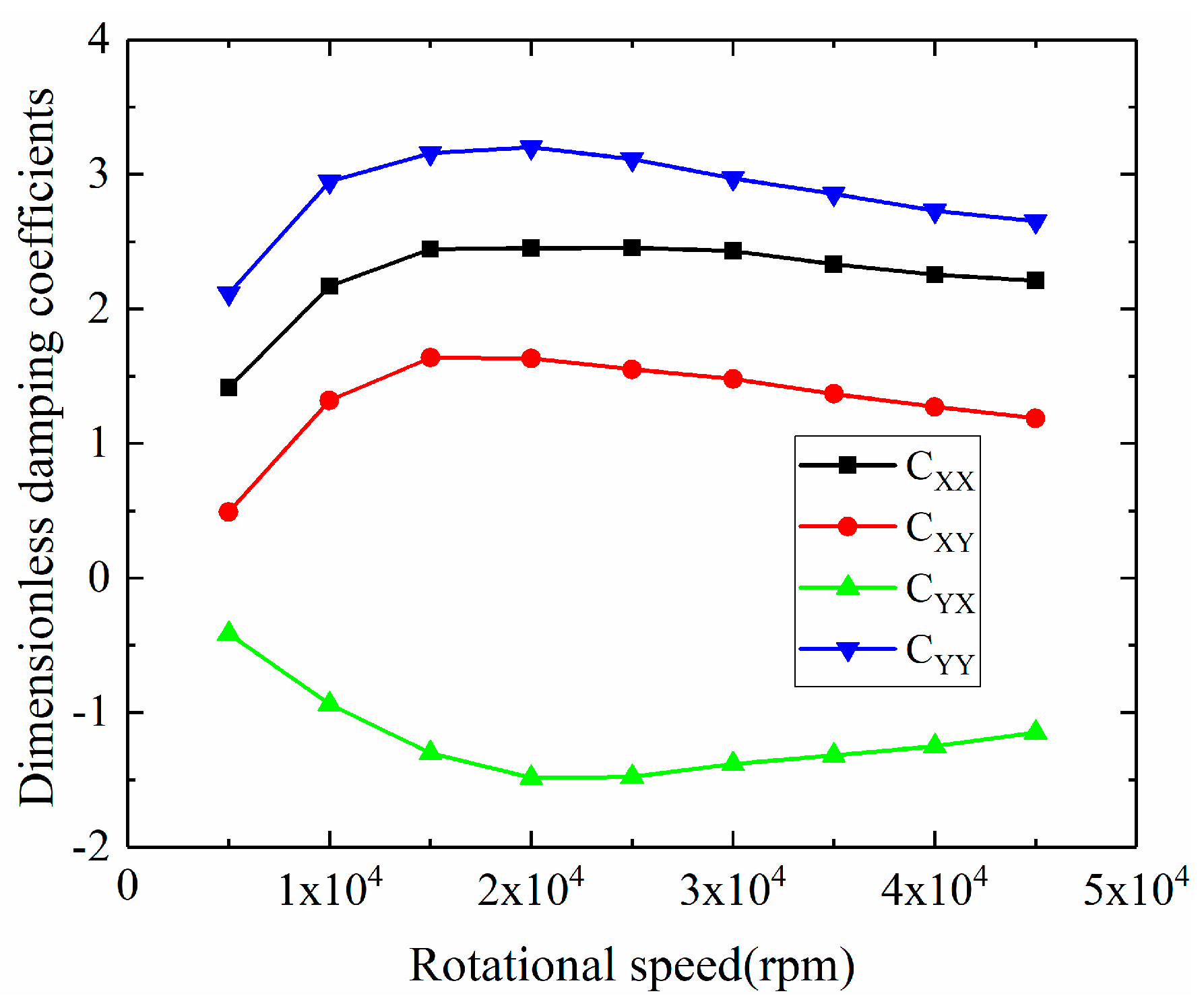
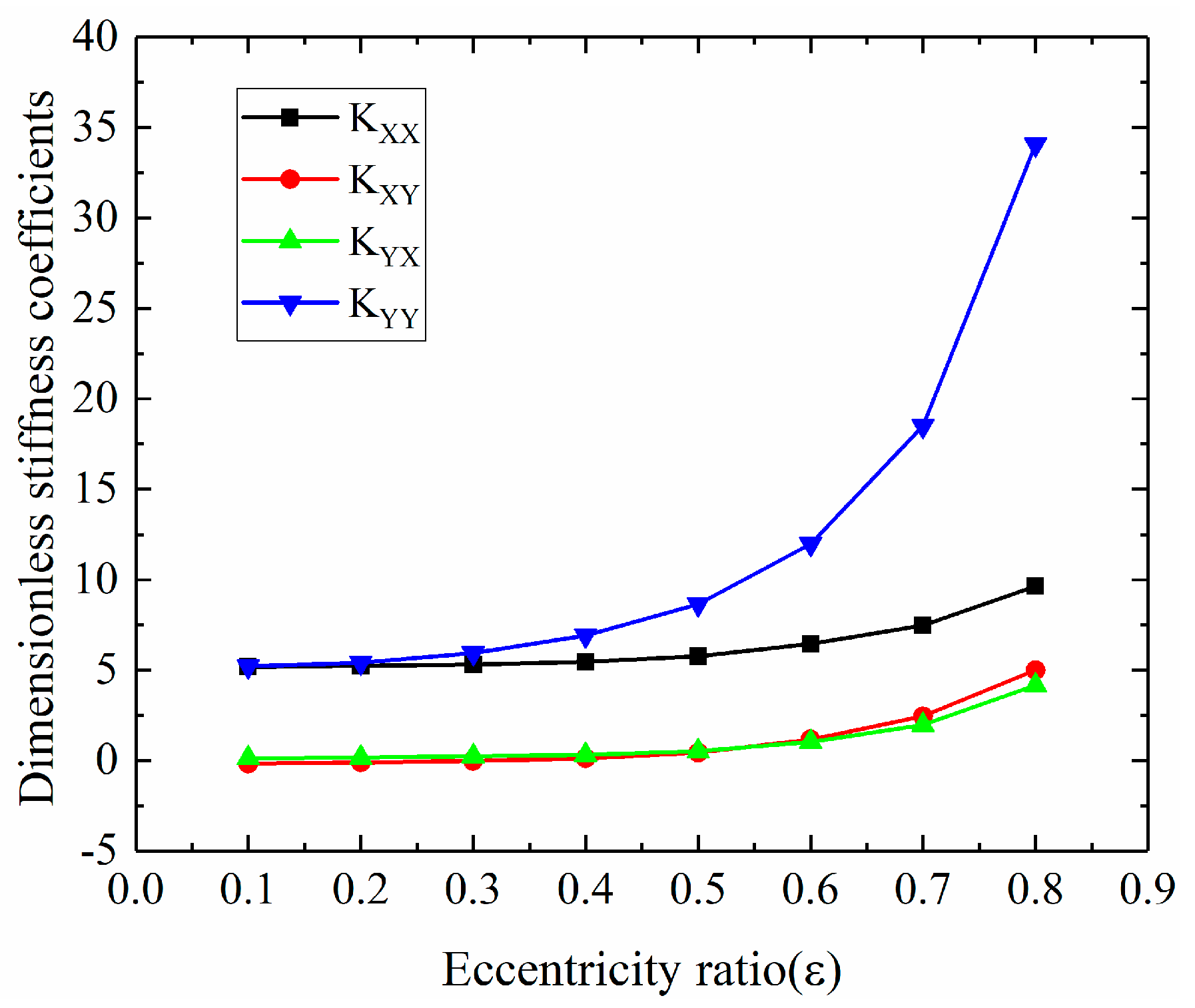
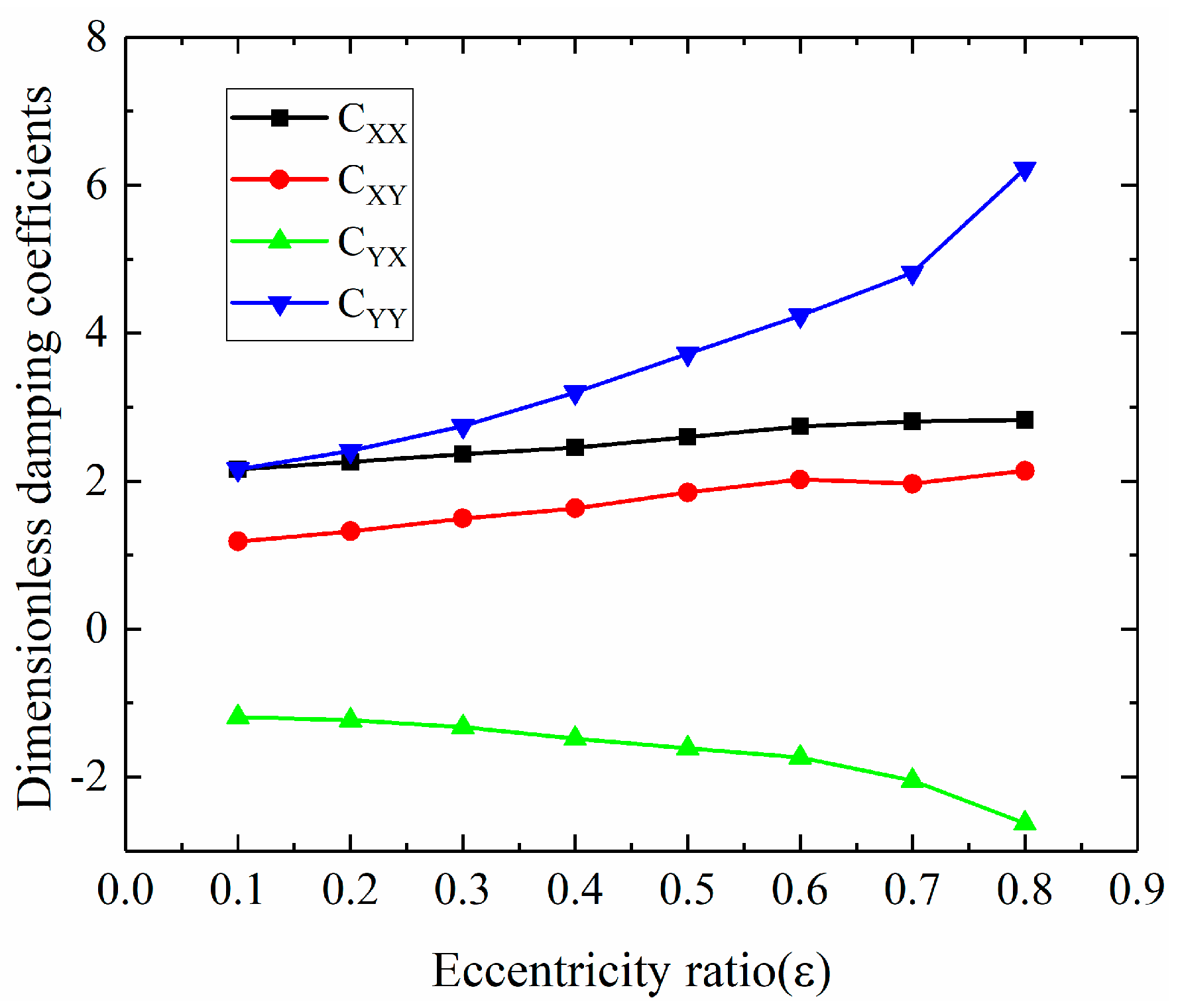
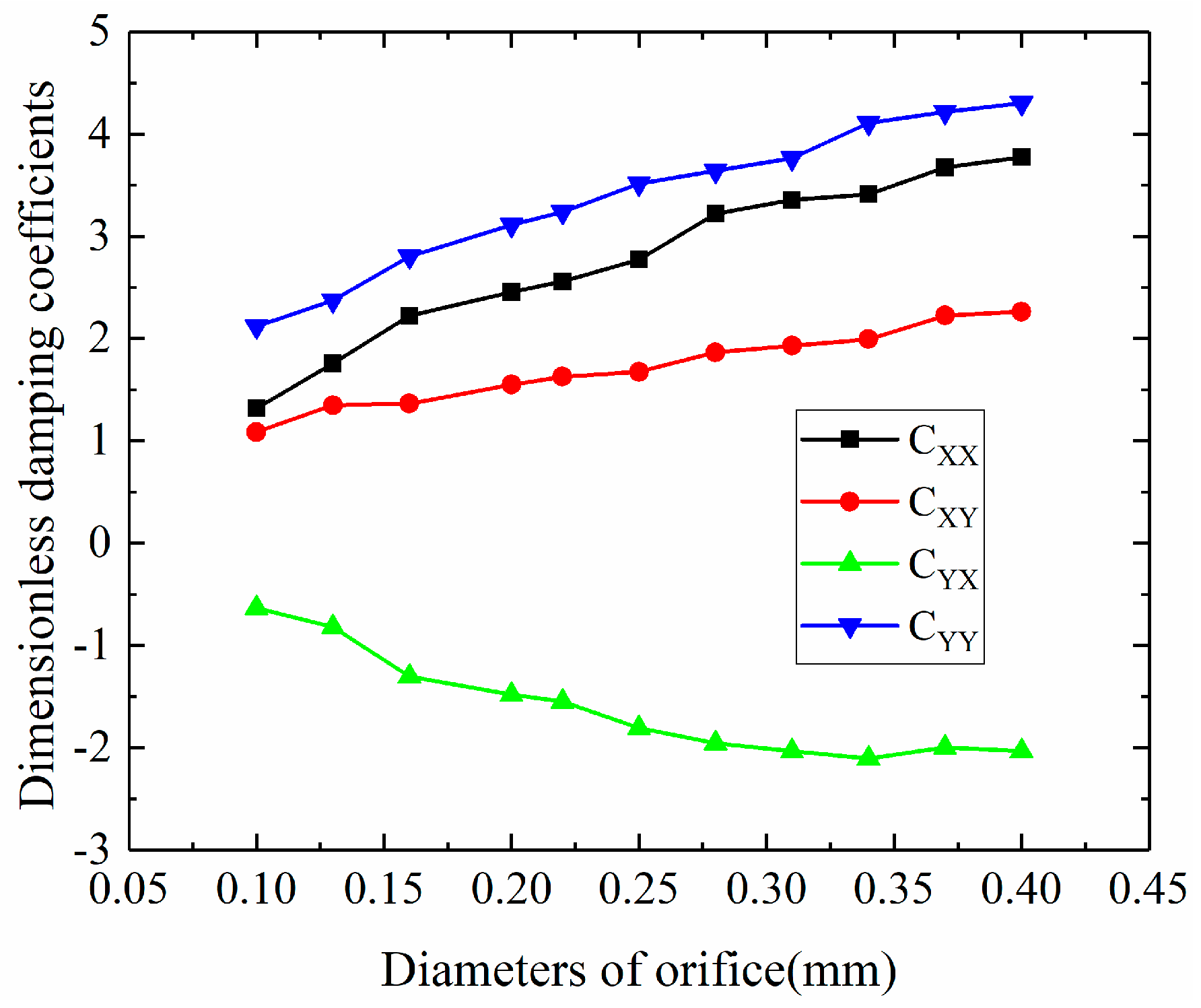
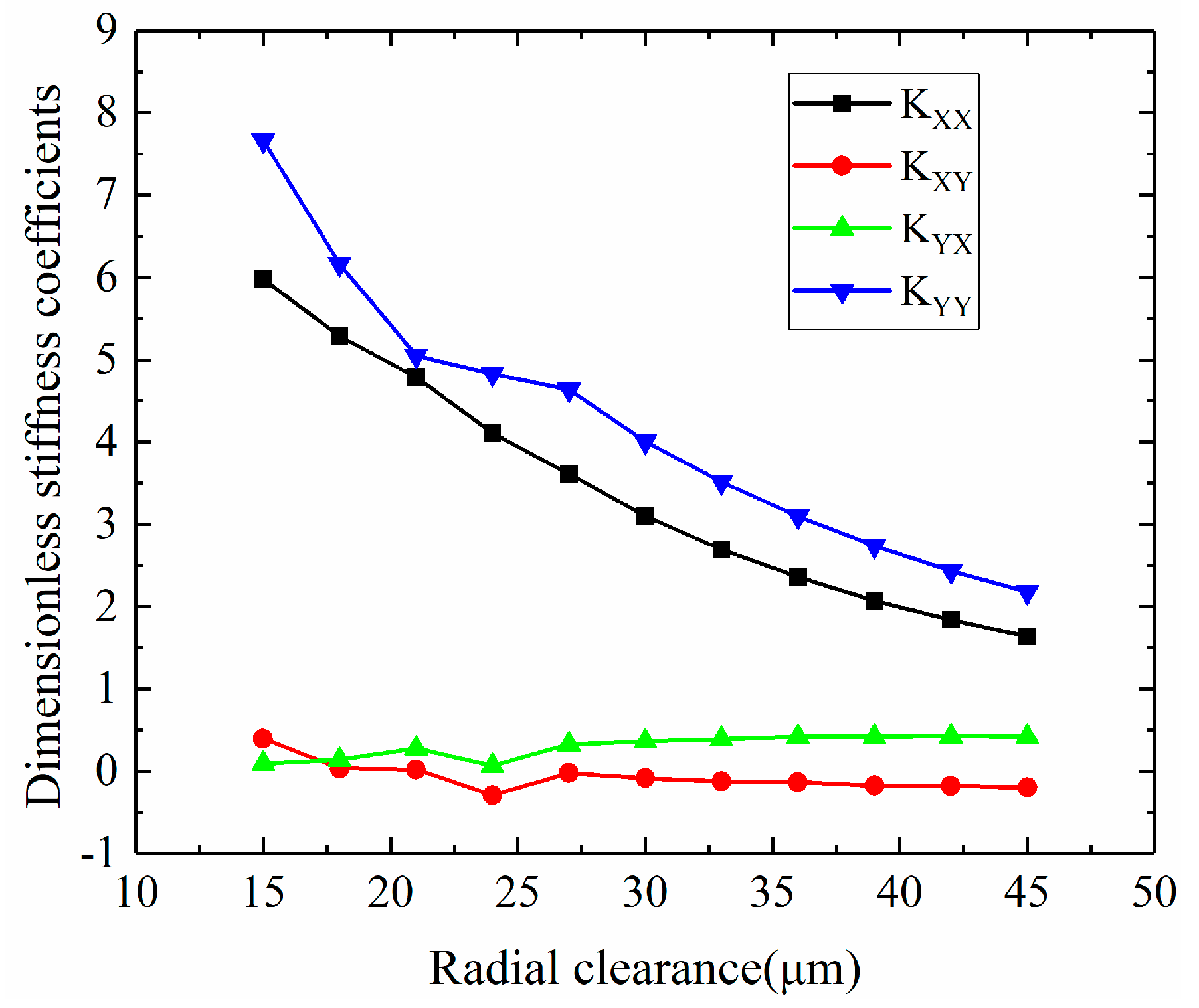
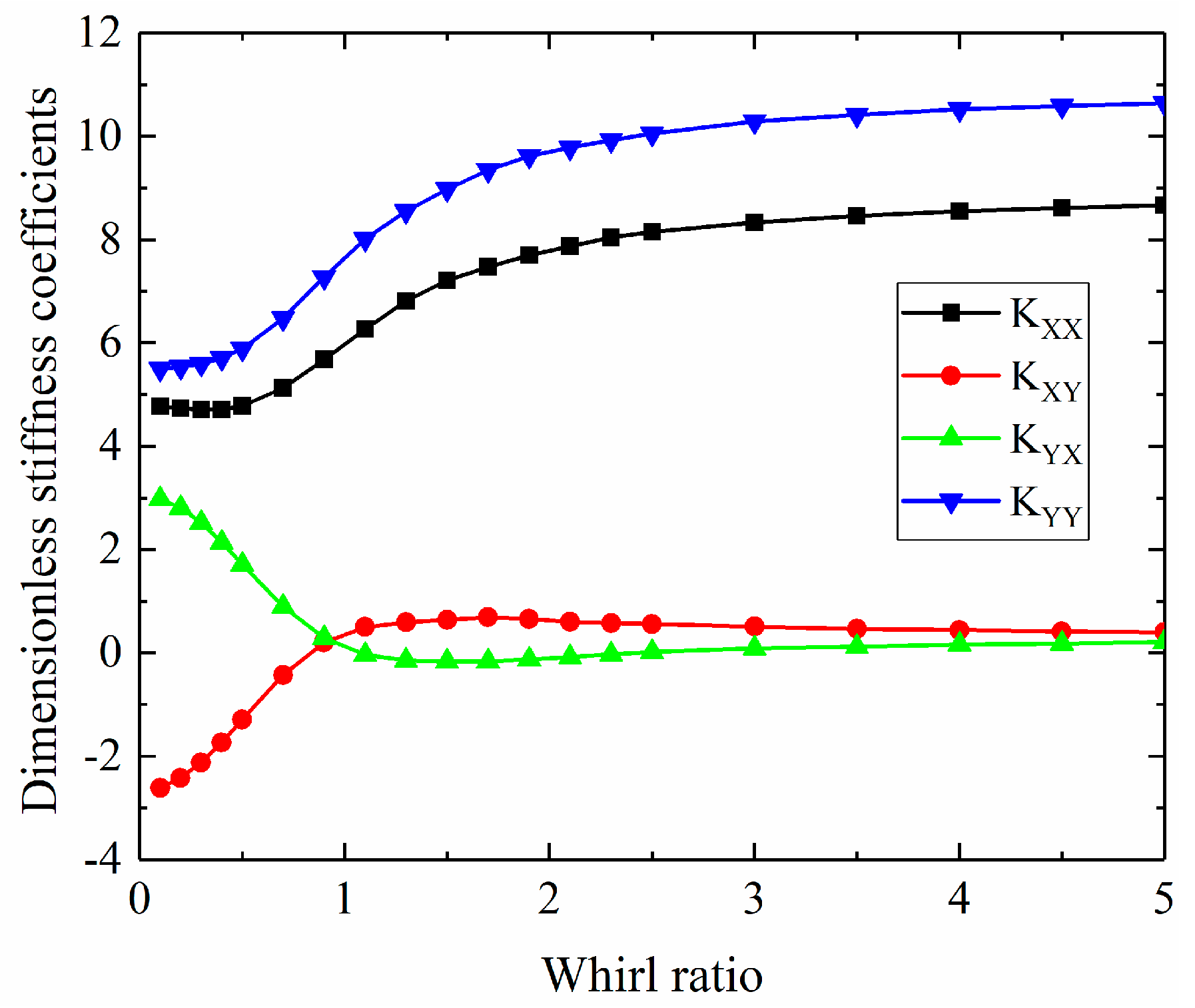
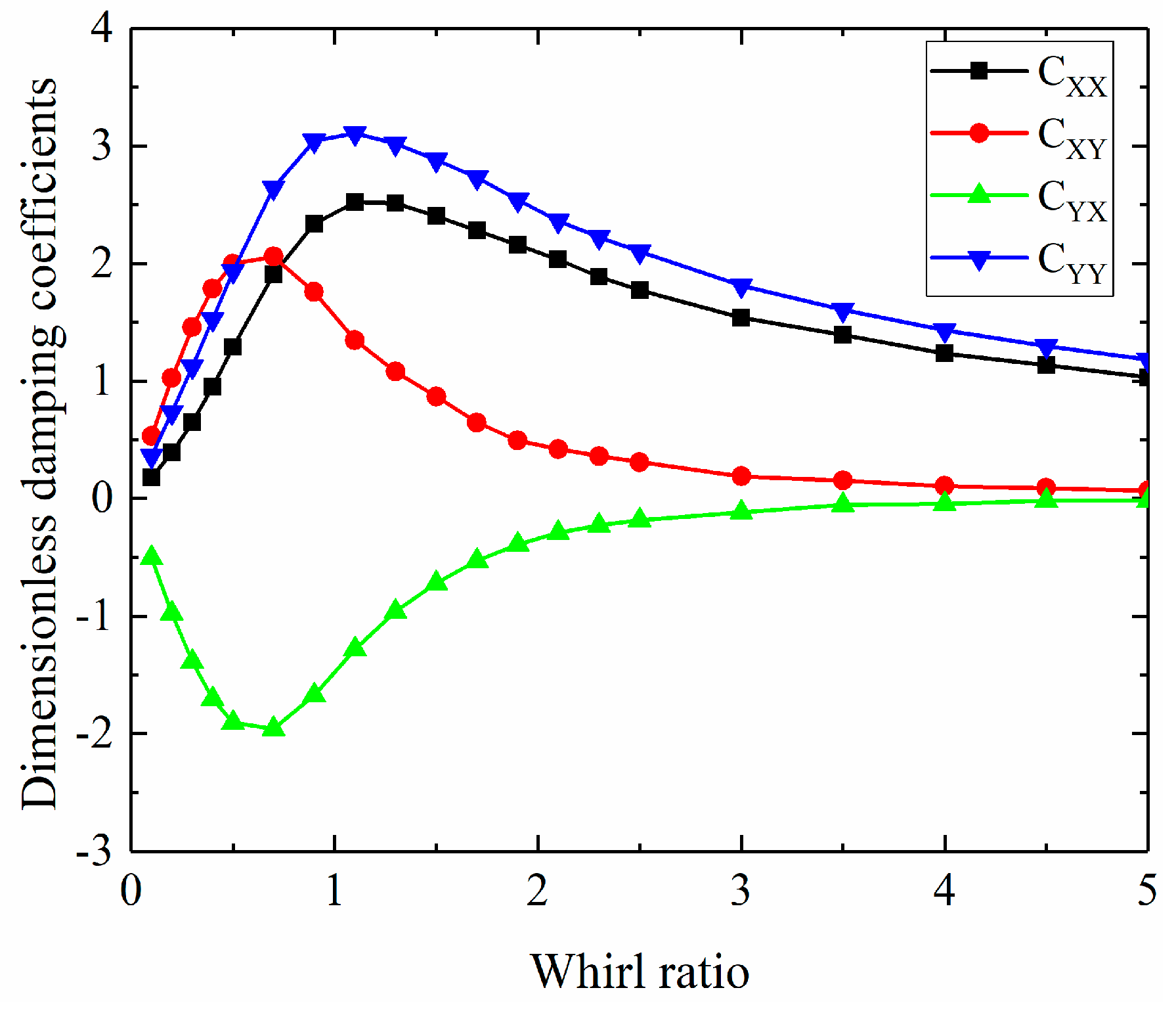
3.2.1. Dynamic Coefficients
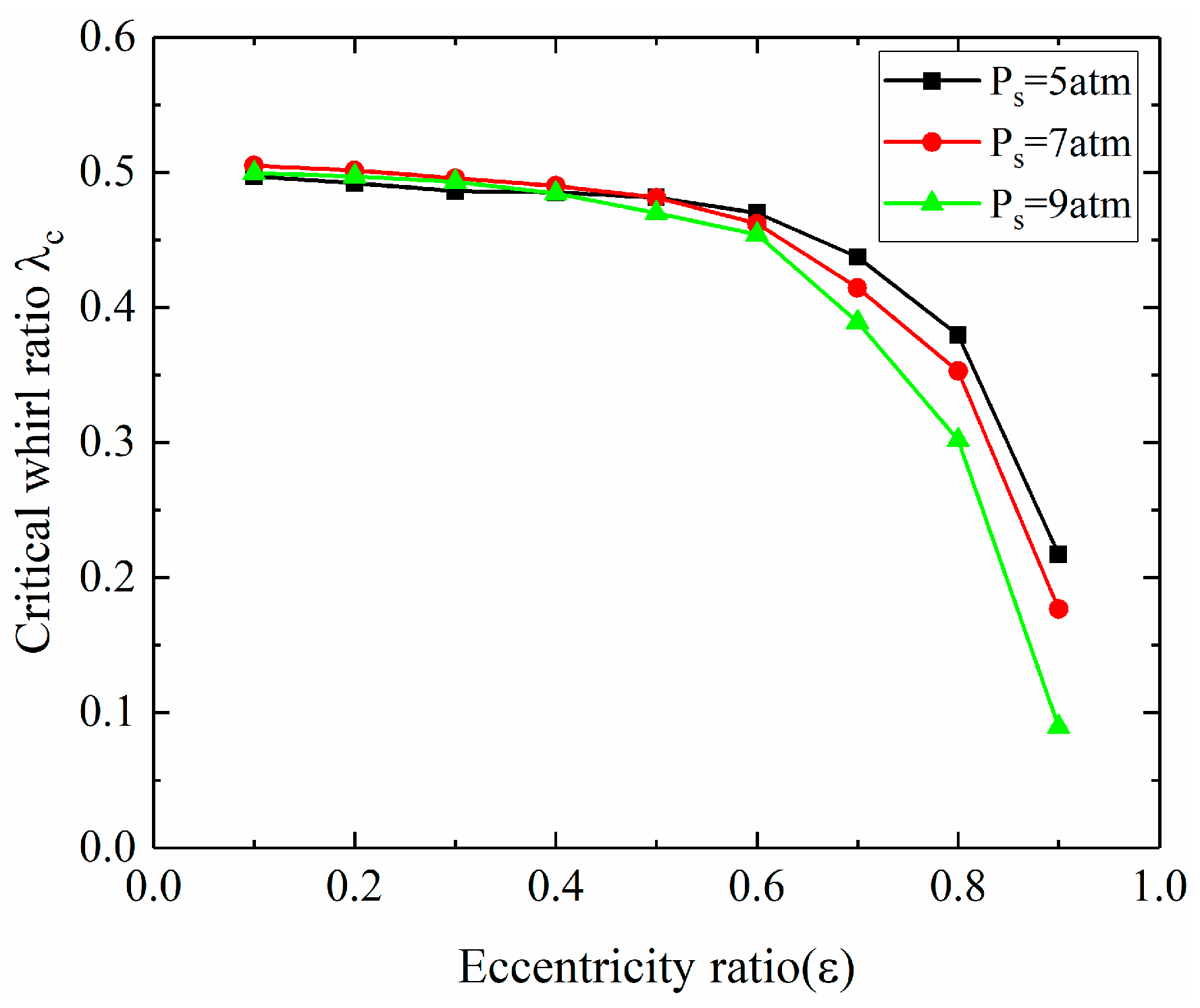
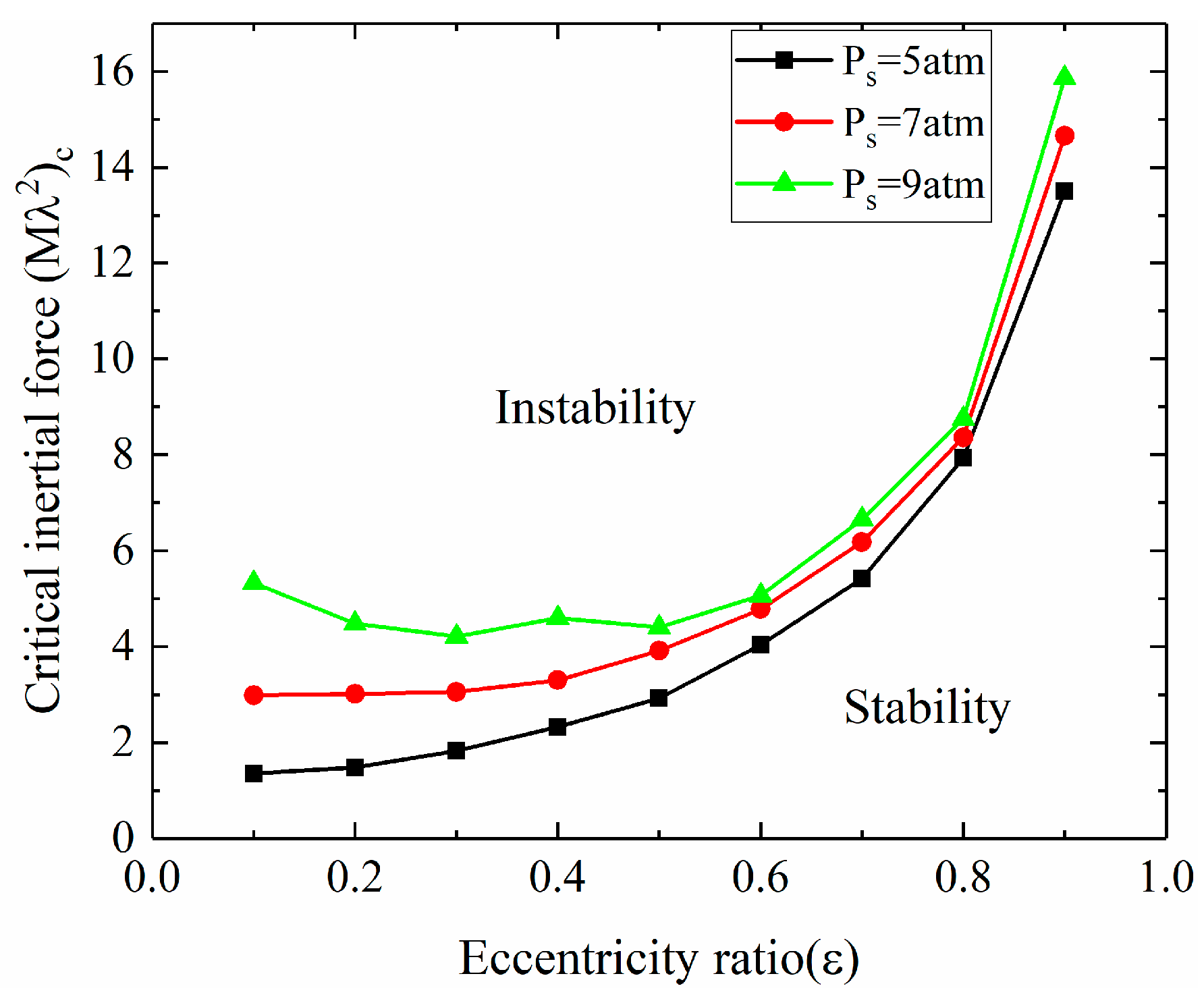
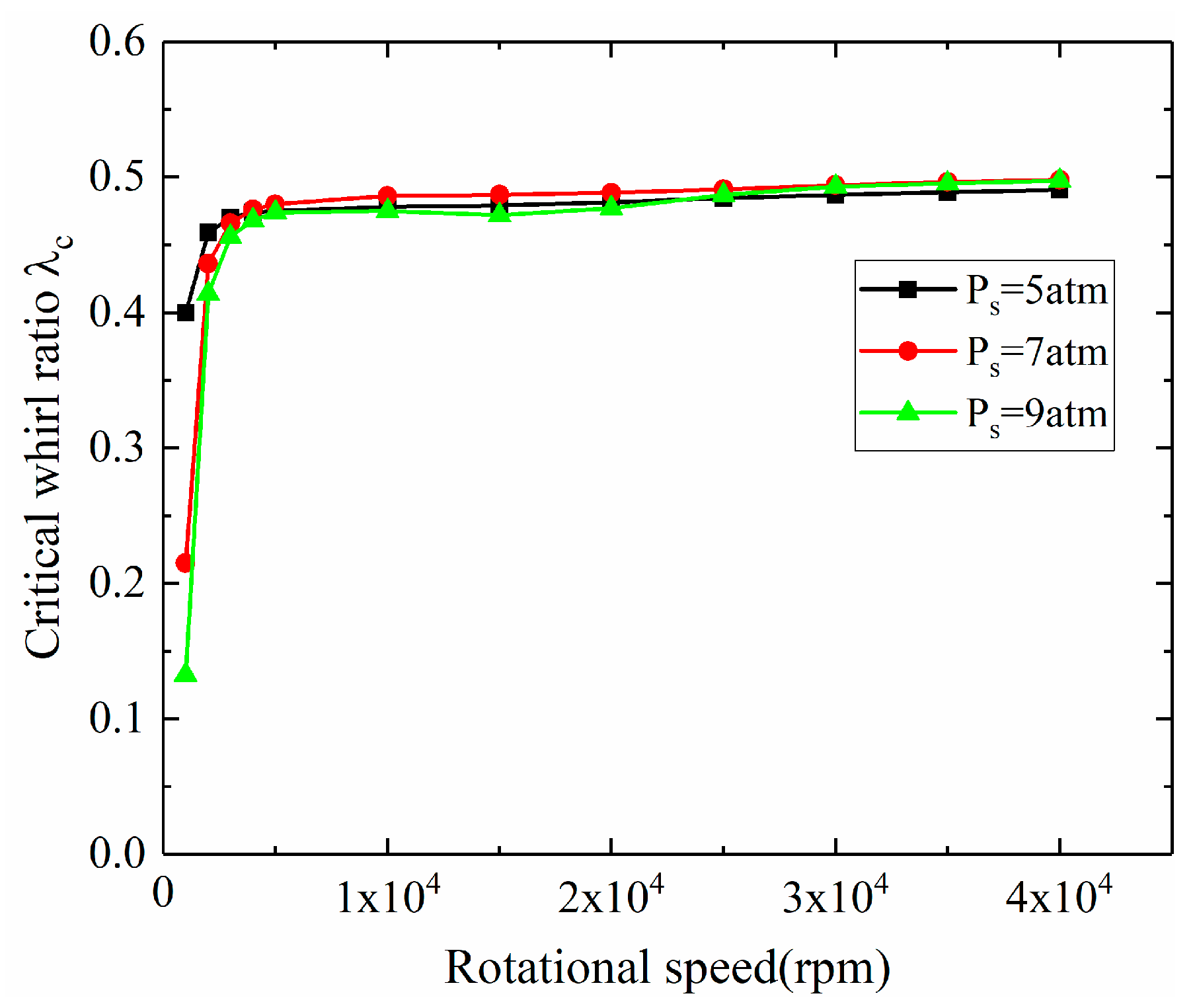
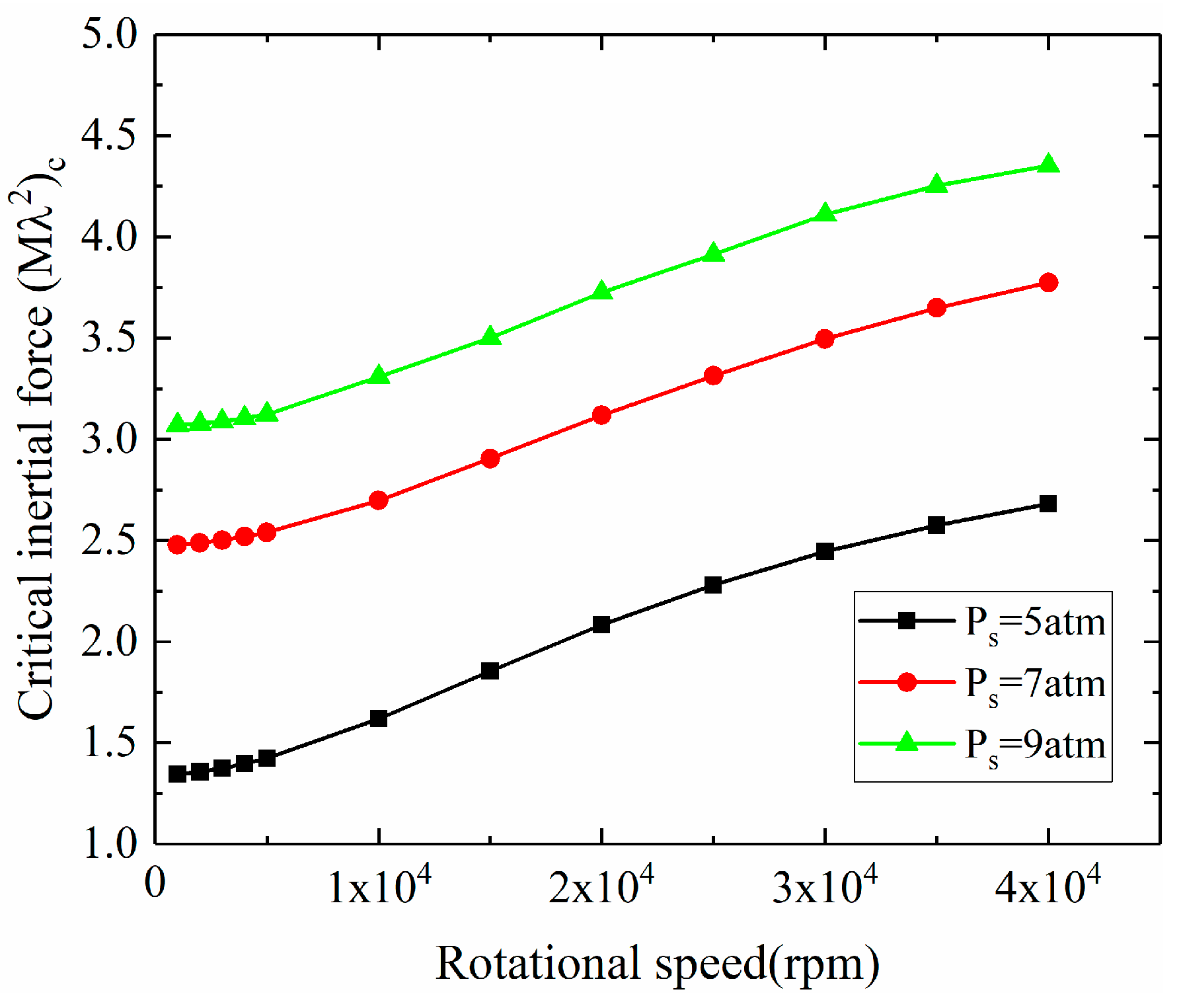
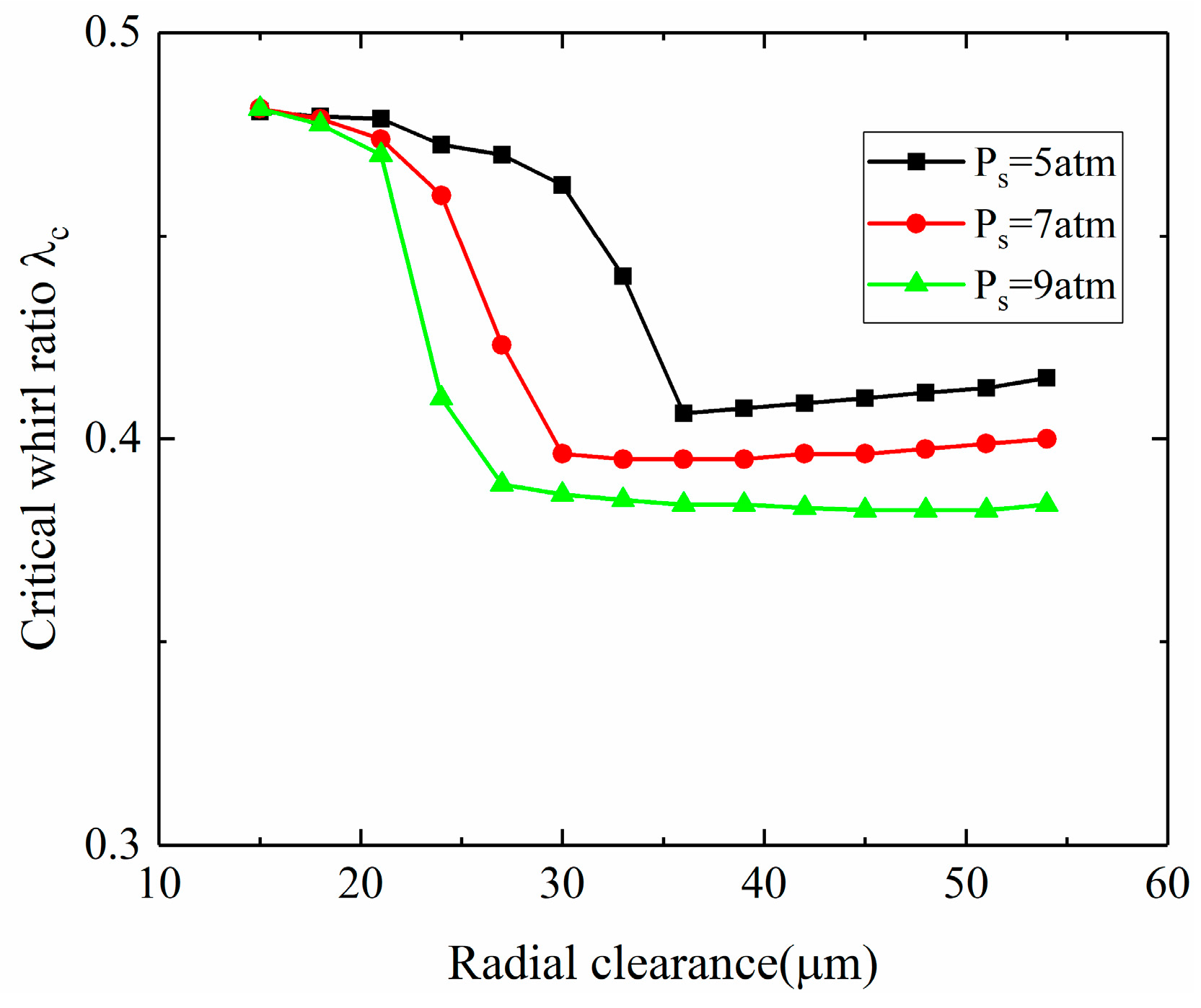
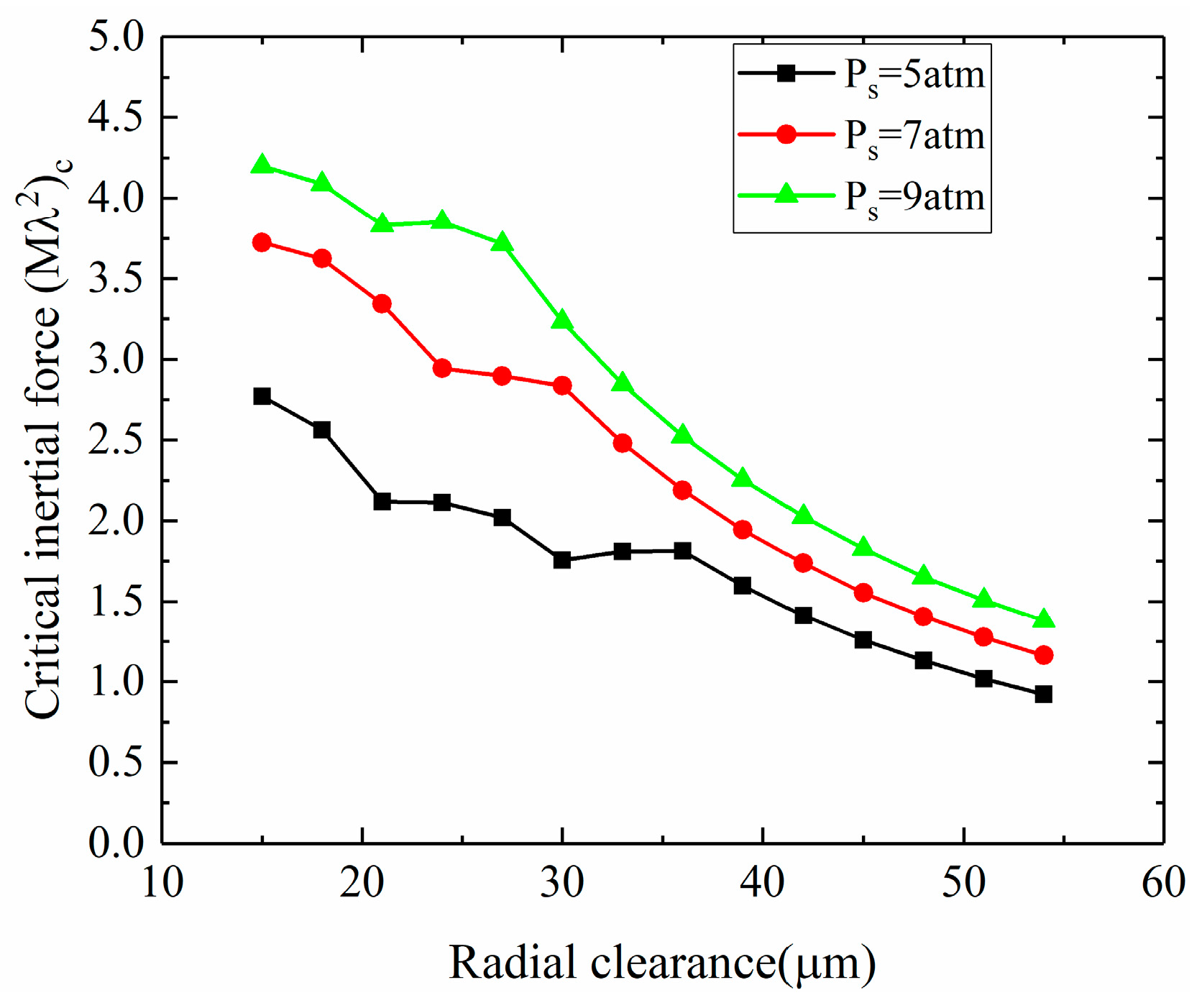
3.2.2. Linear Stability of the Gas–Rotor System
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Nomenclature
| radial clearance | ambient pressure | ||
| discharge coefficient | supply gauge pressure | ||
| diameter of orifices | radius of journal bearing | ||
| diameter of journal bearing | time, dimensionless time | ||
| eccentricity | circumferential velocity | ||
| coefficient matrices in solution of Reynolds equation | axial velocity | ||
| dynamic coefficients | load capacity | ||
| dimensionless dynamic coefficients | circumferential coordinate | ||
| static stiffness | radial coordinate | ||
| inertial force | axial coordinate | ||
| dimensionless inertial force | eccentricity ratio, | ||
| film thickness, | gas density and gas density under atmosphere pressure | ||
| length of the bearing | rotational speed of journal | ||
| differential term of film thickness | journal perturbation rotational speed | ||
| rigid rotor mass | whirl ratio | ||
| dimensionless rotor mass | bearing number | ||
| dimensionless mass flow rate at rth orifice | attitude angle | ||
| differential term of dimensionless mass flow rate at rth orifice | ratio of specific heats of gas | ||
| p | gas pressure | Kronecker function | |
| the dimensionless steady pressure | the subscript along circumference and axial direction, which indicates the position of the pressure | ||
| differential term of film pressure | subscript | the critical parameters | |
| velocity and acceleration along X and Y direction |
Appendix A
References
- Zhang, J.; Zou, D.; Ta, N.; Rao, Z. Numerical research of pressure depression in aerostatic thrust bearing with inherent orifice. Tribol. Int. 2018, 123, 385–396. [Google Scholar] [CrossRef]
- Zhang, J.; Zou, D.; Ta, N.; Rao, Z.; Ding, B. A numerical method for solution of the discharge coefficients in externally pressurized gas bearings with inherent orifice restrictors. Tribol. Int. 2018, 125, 156–168. [Google Scholar] [CrossRef]
- Dal, A.; Karaçay, T. Effects of angular misalignment on the performance of rotor-bearing systems supported by externally pressurized air bearing. Tribol. Int. 2017, 111, 276–288. [Google Scholar] [CrossRef]
- Zhu, X.; San Andrés, L. Rotordynamic Performance of Flexure Pivot Hydrostatic Gas Bearings for Oil-Free Turbomachinery. J. Eng. Gas Turbines Power 2007, 129, 1020–1027. [Google Scholar] [CrossRef]
- Zhang, J.; Han, D.; Song, M.; Xie, Z.; Zou, D. Theoretical and experimental investigation on the effect of supply pressure on the nonlinear behaviors of the aerostatic bearing-rotor system. Mech. Syst. Signal Process. 2021, 158, 107775. [Google Scholar] [CrossRef]
- Zhang, J.; Han, D.; Xie, Z.; Huang, C.; Su, Z. Nonlinear behaviors analysis of high-speed rotor system supported by aerostatic bearings. Tribol. Int. 2022, 170, 107111. [Google Scholar] [CrossRef]
- Qiu, Z.; Tieu, A. Misalignment effect on the static and dynamic characteristics of hydrodynamic journal bearings. J. Tribol. 1995, 117, 717–723. [Google Scholar] [CrossRef]
- Lahmar, M.; Frihi, D.; Nicolas, D. The effect of misalignment on performance characteristics of engine main crankshaft bearings. Eur. J. Mech.-A/Solids 2002, 21, 703–714. [Google Scholar] [CrossRef]
- Lv, F.; Rao, Z.; Ta, N.; Jiao, C. Mixed-lubrication analysis of thin polymer film overplayed metallic marine stern bearing considering wall slip and journal misalignment. Tribol. Int. 2017, 109, 390–397. [Google Scholar] [CrossRef]
- Lv, F.; Jiao, C.; Ta, N.; Rao, Z. Mixed-lubrication analysis of misaligned bearing considering turbulence. Tribol. Int. 2018, 119, 19–26. [Google Scholar] [CrossRef]
- Wrblewski, P.; Iskra, A. Geometry of shape of profiles of the sliding surface of ring seals in the aspect of friction losses and oil film parameters. Combust. Engines 2016, 167, 38–52. [Google Scholar] [CrossRef]
- Rostek, E.; Babiak, M.; Wróblewski, E. The Influence of Oil Pressure in the Engine Lubrication System on Friction Losses. Procedia Eng. 2017, 192, 771–776. [Google Scholar] [CrossRef]
- Chen, C.-H.; Kang, Y.; Yang, D.-W.; Hwang, R.-M.; Shyr, S.-S. Influence of the number of feeding holes on the performances of aerostatic bearings. Ind. Lubr. Tribol. 2010, 62, 150–160. [Google Scholar] [CrossRef]
- Ise, T.; Miyatake, H.; Asami, T. Asymmetric Supply Type Hydrostatic Journal Gas Bearings to Support Large Load Rotors. J. Adv. Mech. Des. Syst. Manuf. 2012, 6, 149–157. [Google Scholar] [CrossRef]
- Du, J.; Zhang, G.; Liu, T.; To, S. Improvement on load performance of externally pressurized gas journal bearings by opening pressure-equalizing grooves. Tribol. Int. 2014, 73, 156–166. [Google Scholar] [CrossRef]
- Su, J.C.; Lie, K. Rotation effects on hybrid air journal bearings. Tribol. Int. 2003, 36, 717–726. [Google Scholar] [CrossRef]
- Yang, D.-W.; Chen, C.-H.; Kang, Y.; Hwang, R.-M.; Shyr, S.-S. Influence of orifices on stability of rotor-aerostatic bearing system. Tribol. Int. 2009, 42, 1206–1219. [Google Scholar] [CrossRef]
- Wang, X.; Xu, Q.; Wang, B.; Zhang, L.; Yang, H.; Peng, Z. Numerical Calculation of Rotation Effects on Hybrid Air Journal Bearings. Tribol. Trans. 2017, 60, 195–207. [Google Scholar] [CrossRef]
- Wang, X.; Xu, Q.; Wang, B.; Zhang, L.; Yang, H.; Peng, Z. Effect of surface waviness on the static performance of aerostatic journal bearings. Tribol. Int. 2016, 103, 394–405. [Google Scholar] [CrossRef]
- Lund, J. A theoretical analysis of whirl instability and pneumatic hammer for a rigid rotor in pressurized gas journal bearings. ASME J. Lubr. Technol 1967, 89, 154–166. [Google Scholar] [CrossRef]
- Wadhwa, S.; Sinhasan, R.; Singh, D. Analysis of orifice compensated externally pressurized gas bearings. Tribol. Int. 1983, 16, 203–211. [Google Scholar] [CrossRef]
- Han, D.-C.; Park, S.-S.; Kim, W.-J.; Kim, J.-W. A study on the characteristics of externally pressurized air bearings. Precis. Eng. 1994, 16, 164–173. [Google Scholar] [CrossRef]
- Su, J.C.; Lie, K. Rotor dynamic instability analysis on hybrid air journal bearings. Tribol. Int. 2006, 39, 238–248. [Google Scholar] [CrossRef]
- Chen, C.-H.; Yang, D.-W.; Kang, Y.; Hwang, R.-M.; Shyr, S.-S. The influence of orifice restriction on the stability of rigid rotor-aerostatic bearing system. In Proceedings of the ASME Turbo Expo 2009: Power for Land, Sea, and Air, Orlando, FL, USA, 8–12 June 2009; pp. 909–917. [Google Scholar]
- Chen, C.-H.; Tsai, T.-H.; Yang, D.-W.; Kang, Y.; Chen, J.-H. The comparison in stability of rotor-aerostatic bearing system compensated by orifices and inherences. Tribol. Int. 2010, 43, 1360–1373. [Google Scholar] [CrossRef]
- Morosi, S.; Santos, I.F. On the modelling of hybrid aerostatic-gas journal bearings. Proc. Inst. Mech. Eng. Part J J. Eng. Tribol. 2011, 225, 641–653. [Google Scholar] [CrossRef]
- Colombo, F.; Raparelli, T.; Viktorov, V. Externally pressurized gas bearings: A comparison between two supply holes configurations. Tribol. Int. 2009, 42, 303–310. [Google Scholar] [CrossRef]
- Otsu, Y.; Somaya, K.; Yoshimoto, S. High-speed stability of a rigid rotor supported by aerostatic journal bearings with compound restrictors. Tribol. Int. 2011, 44, 9–17. [Google Scholar] [CrossRef]
- Belforte, G.; Raparelli, T.; Viktorov, V. Modeling and identification of gas journal bearings: Self-acting gas bearing results. Trans.-Am. Soc. Mech. Eng. J. Tribol. 2002, 124, 716–724. [Google Scholar] [CrossRef]
- Viktorov, V.; Belforte, G.; Raparelli, T. Modeling and Identification of Gas Journal Bearings: Externally Pressurized Gas Bearing Results. J. Tribol. 2005, 127, 548–556. [Google Scholar] [CrossRef]
- Wang, X.; Xu, Q.; Huang, M.; Zhang, L.; Peng, Z. Effects of journal rotation and surface waviness on the dynamic performance of aerostatic journal bearings. Tribol. Int. 2017, 112, 1–9. [Google Scholar] [CrossRef]
- Xie, Z.; Jiao, J.; Yang, K. Theoretical and experimental study on the fluid-structure-acoustic coupling dynamics of a new water lubricated bearing. Tribol. Int. 2023, 177, 107982. [Google Scholar] [CrossRef]
- SHINICHIT. Gas Bearing: Design, Fabrication and Application; Aerospace Publishing House: Beijing, China, 1988. [Google Scholar]
- Ma, W.; Cui, J.; Liu, Y.; Tan, J. Improving the pneumatic hammer stability of aerostatic thrust bearing with recess using damping orifices. Tribol. Int. 2016, 103, 281–288. [Google Scholar] [CrossRef]




































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| The Number of m | The Number of n | Load Capacity/N |
|---|---|---|
| 16 | 32 | 177.33 |
| 32 | 32 | 174.80 |
| 32 | 64 | 173.23 |
| 48 | 80 | 171.67 |
| 64 | 96 | 171.15 |
| 64 | 128 | 170.83 |
| Calculation Parameters | Value |
|---|---|
| Bearing diameter (D) | 25 mm |
| Bearing length (L) | 50 mm |
| Gas density () | 1.204 kg/m3 |
| Gas viscosity () | 1.82·10−5 Ns/m2 |
| Ration of specific heat of gas () | 1.4 |
| Atmospheric pressure (atm) () | 101,325 Pa |
| Rows of the orifice | 2 |
| The orifice number of each row orifice | 8 |
| Calculation Parameters | Value |
|---|---|
| Bearing diameter (D) | 50 mm |
| Bearing length (L) | 50 mm |
| Gas density () | 1.204 kg/m3 |
| Gas viscosity () | 1.82·10−5 Ns/m2 |
| Ration of specific heats of gas () | 1.4 |
| Atmospheric pressure (atm) () | 101,325 Pa |
| Rows of the orifice | 2 |
| The orifice number of each row orifice | 8 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, J.; Deng, Z.; Zhang, K.; Jin, H.; Yuan, T.; Chen, C.; Su, Z.; Cao, Y.; Xie, Z.; Wu, D.; et al. The Influences of Different Parameters on the Static and Dynamic Performances of the Aerostatic Bearing. Lubricants 2023, 11, 130. https://doi.org/10.3390/lubricants11030130
Zhang J, Deng Z, Zhang K, Jin H, Yuan T, Chen C, Su Z, Cao Y, Xie Z, Wu D, et al. The Influences of Different Parameters on the Static and Dynamic Performances of the Aerostatic Bearing. Lubricants. 2023; 11(3):130. https://doi.org/10.3390/lubricants11030130
Chicago/Turabian StyleZhang, Jianbo, Zhifang Deng, Kun Zhang, Hailiang Jin, Tao Yuan, Ce Chen, Zhimin Su, Yitao Cao, Zhongliang Xie, Danyang Wu, and et al. 2023. "The Influences of Different Parameters on the Static and Dynamic Performances of the Aerostatic Bearing" Lubricants 11, no. 3: 130. https://doi.org/10.3390/lubricants11030130
APA StyleZhang, J., Deng, Z., Zhang, K., Jin, H., Yuan, T., Chen, C., Su, Z., Cao, Y., Xie, Z., Wu, D., & Sui, J. (2023). The Influences of Different Parameters on the Static and Dynamic Performances of the Aerostatic Bearing. Lubricants, 11(3), 130. https://doi.org/10.3390/lubricants11030130