
Adaptive Cutting Control for Roadheaders Based on Performance Optimization



Abstract
1. Introduction
2. The Establishment of Mathematical Models
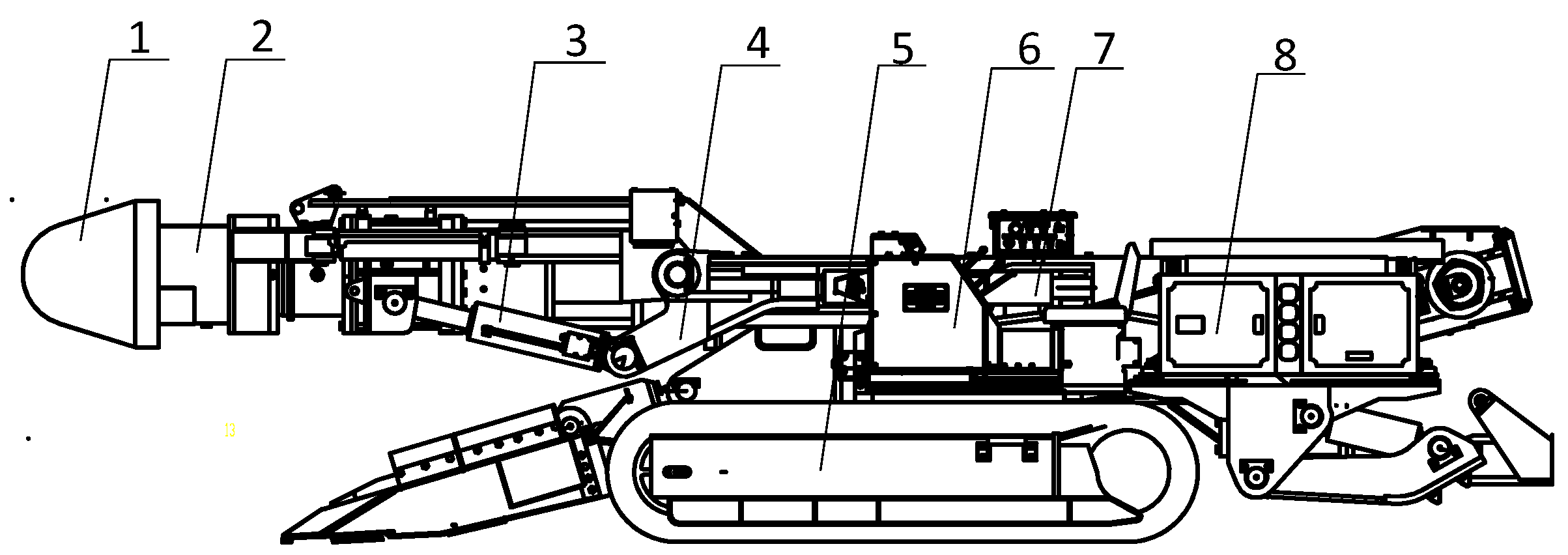
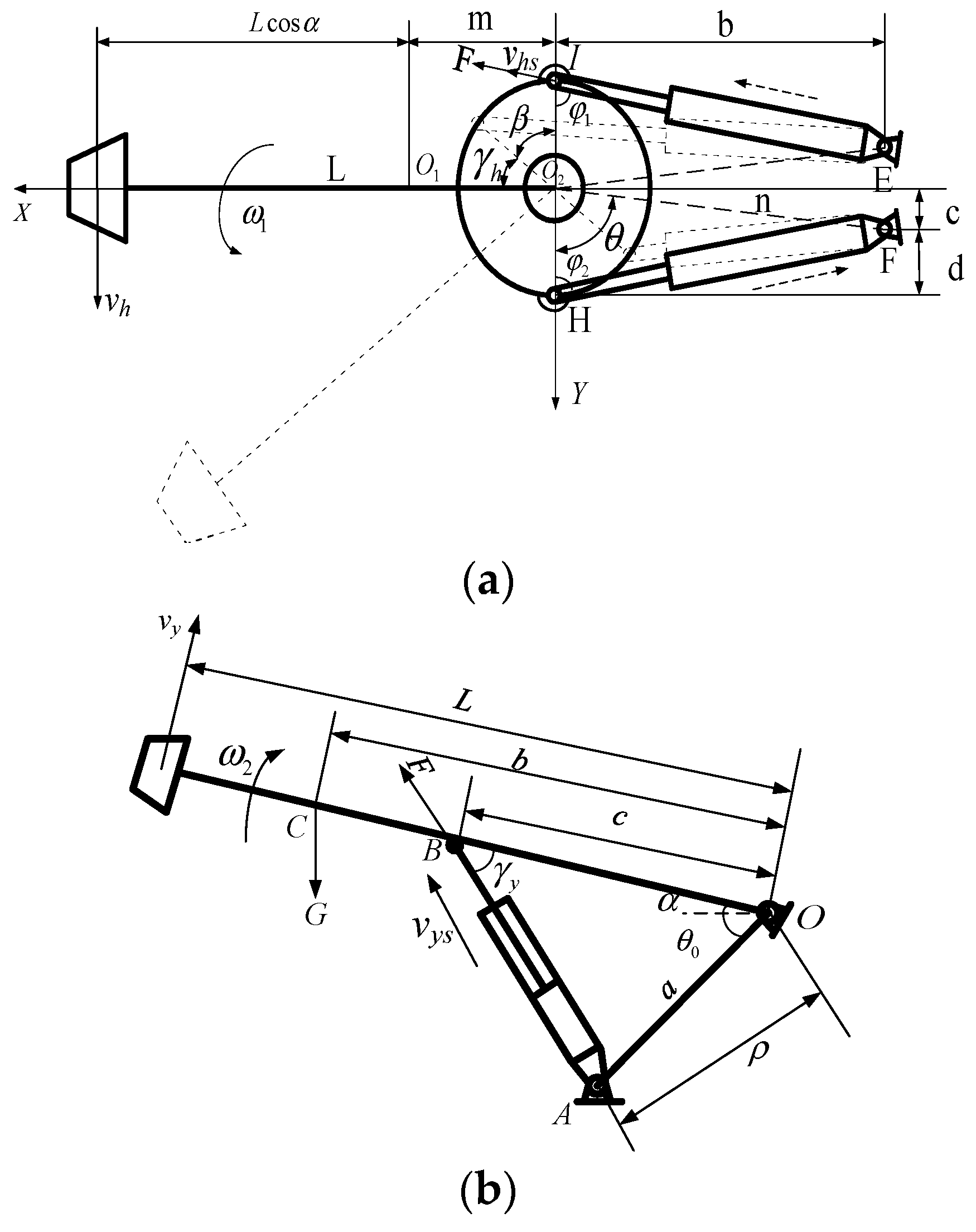
2.1. Working Principle of Roadheader
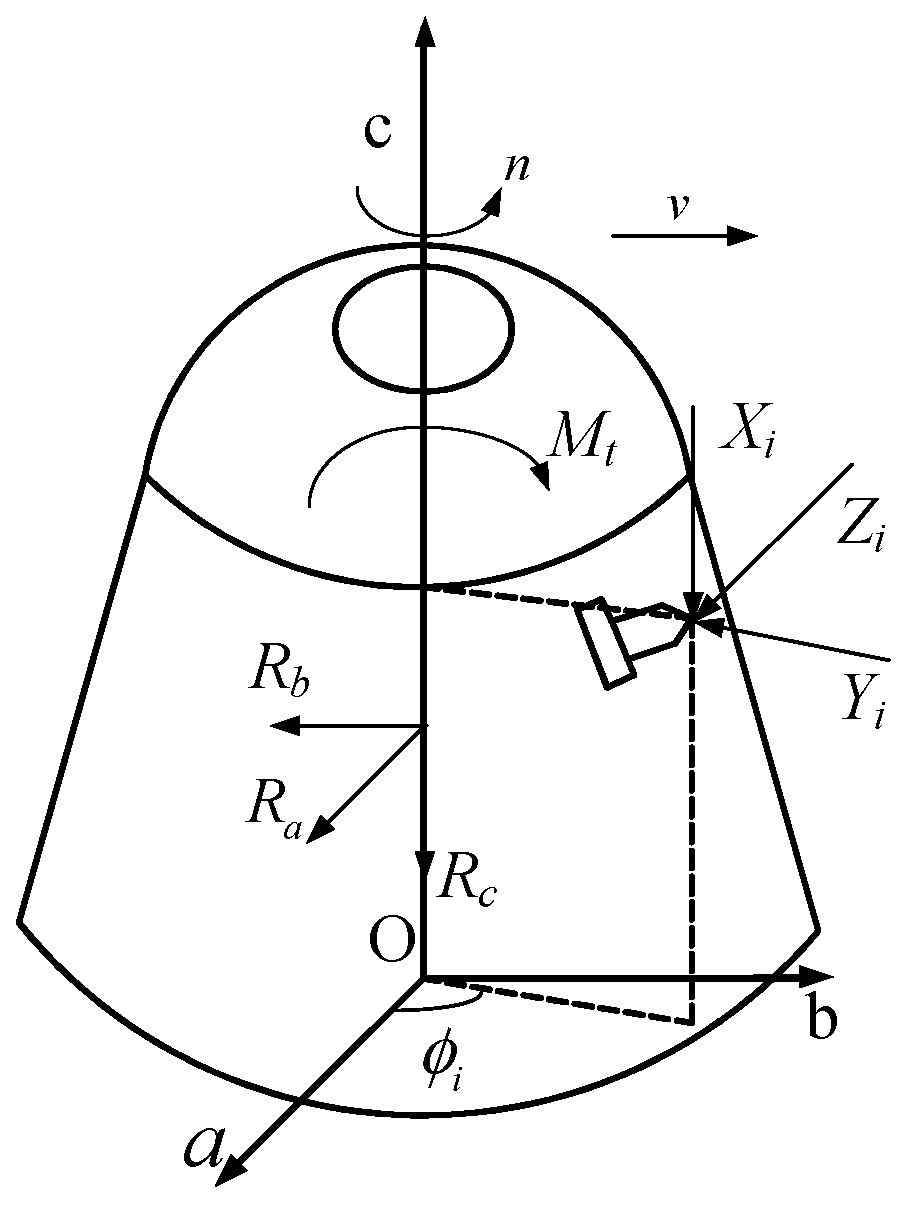
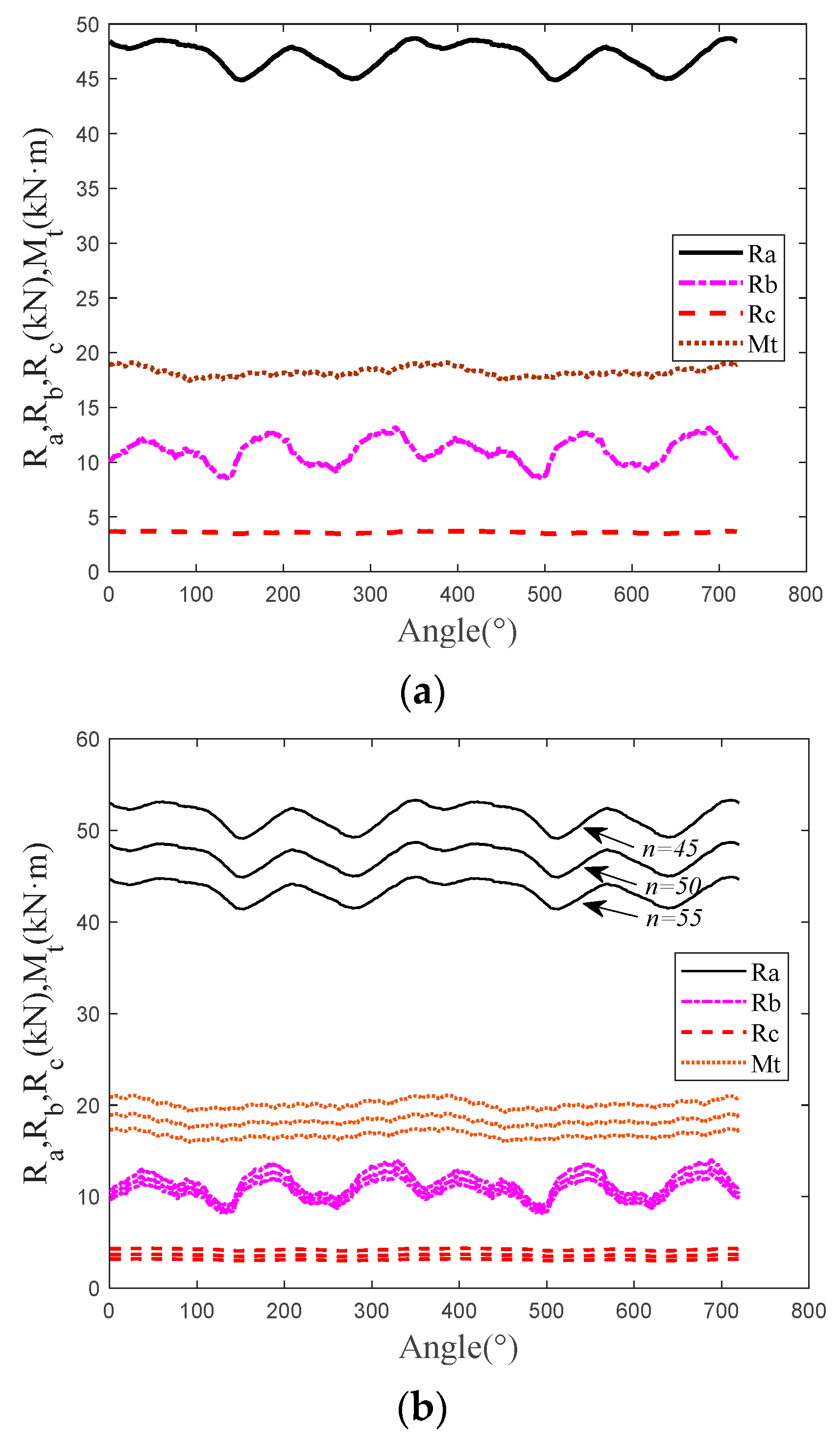
2.2. Roadheader Cutting Head Load
2.3. Establishment of Coal and Rock Load Identification Database
3. Cutting Parameter Optimization
3.1. Cutting Parameter Optimization Do Not Use the Same Titles
- (1)
- Determination of design variables
- (2)
- Objective function establishment
- (3)
- Analysis of optimization results
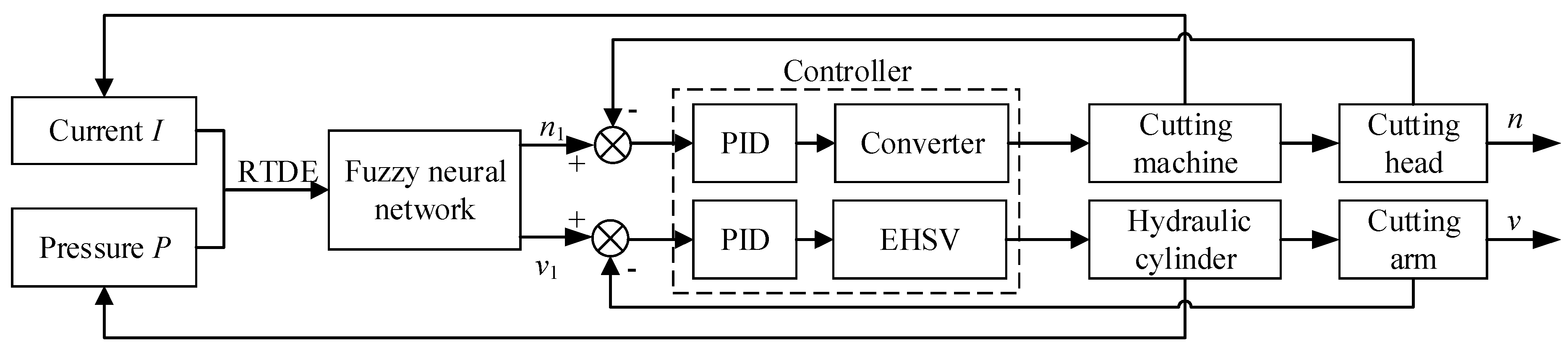
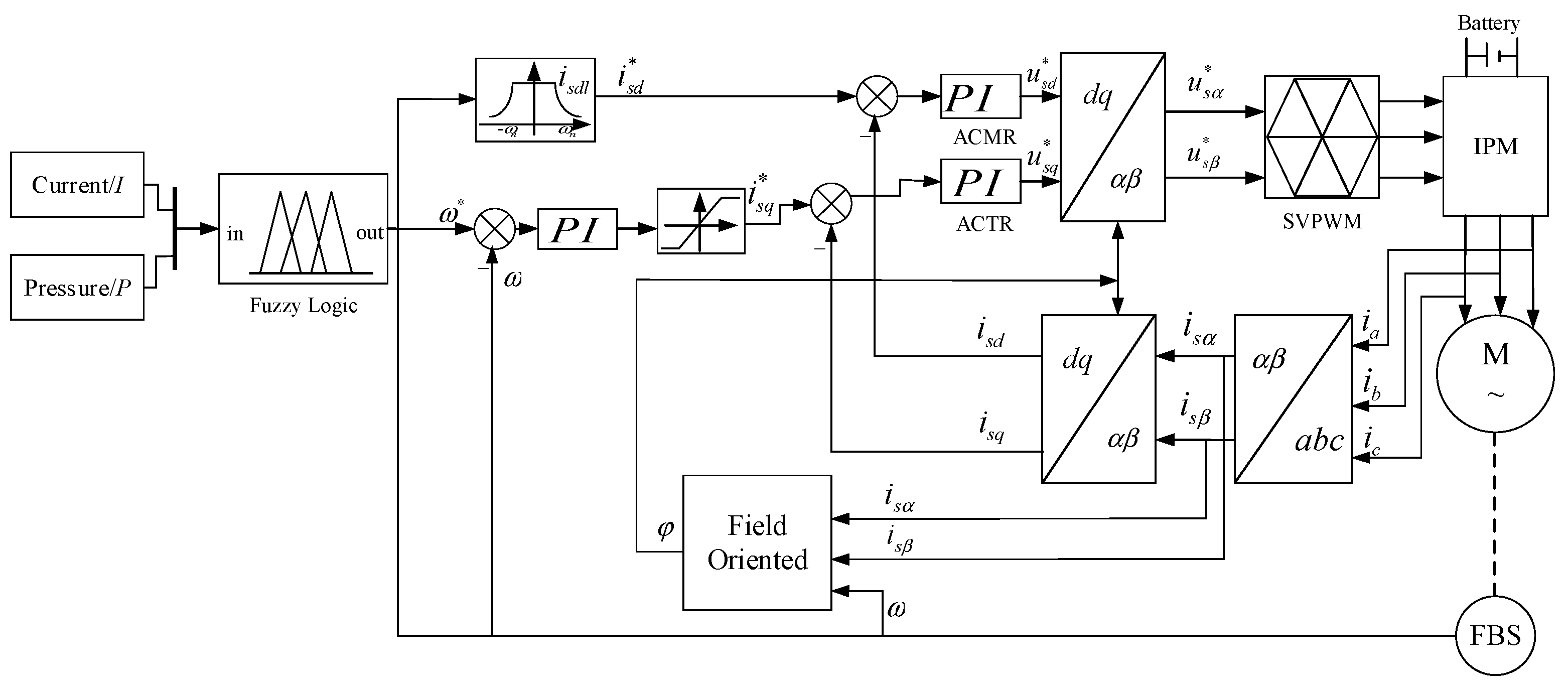
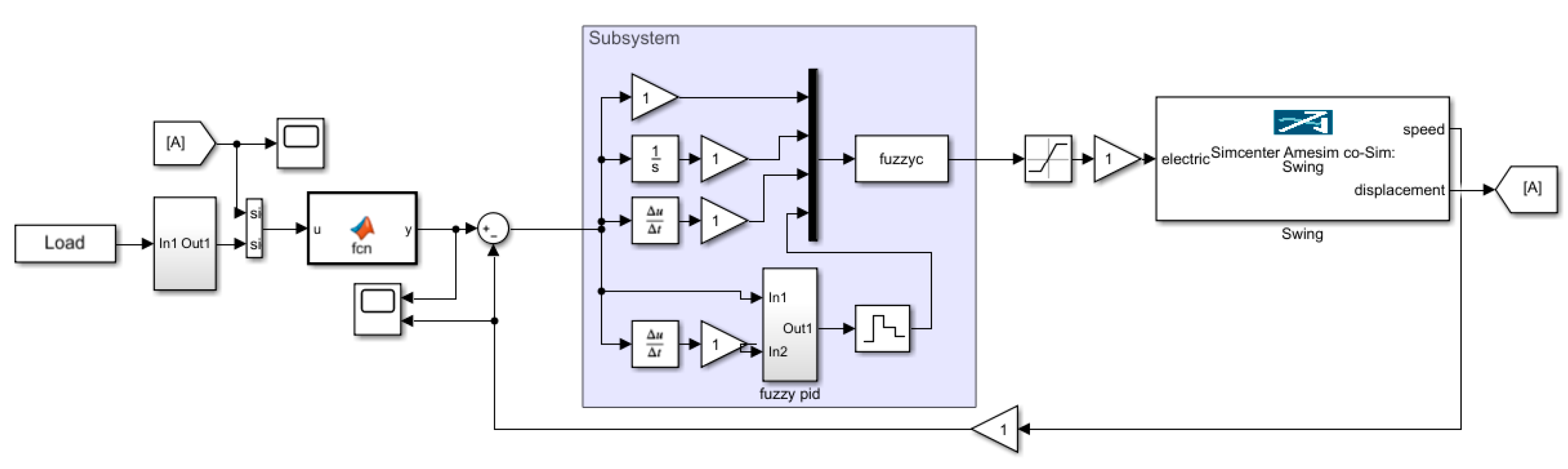
3.2. Adaptive Variable Speed Cutting Control Strategy for Roadheader
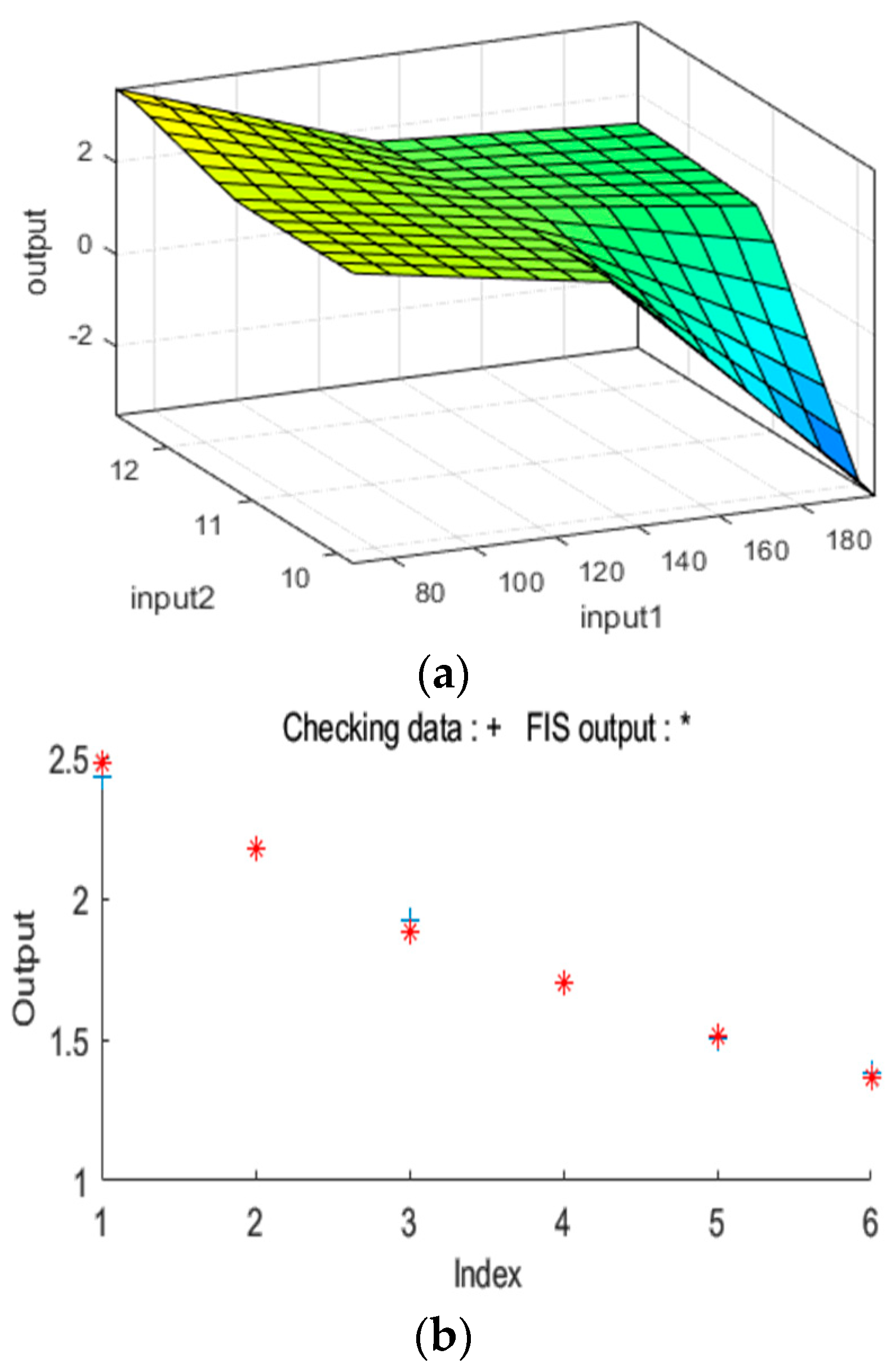
3.3. Fuzzy Neural Recognition of Coal and Rock Impedance
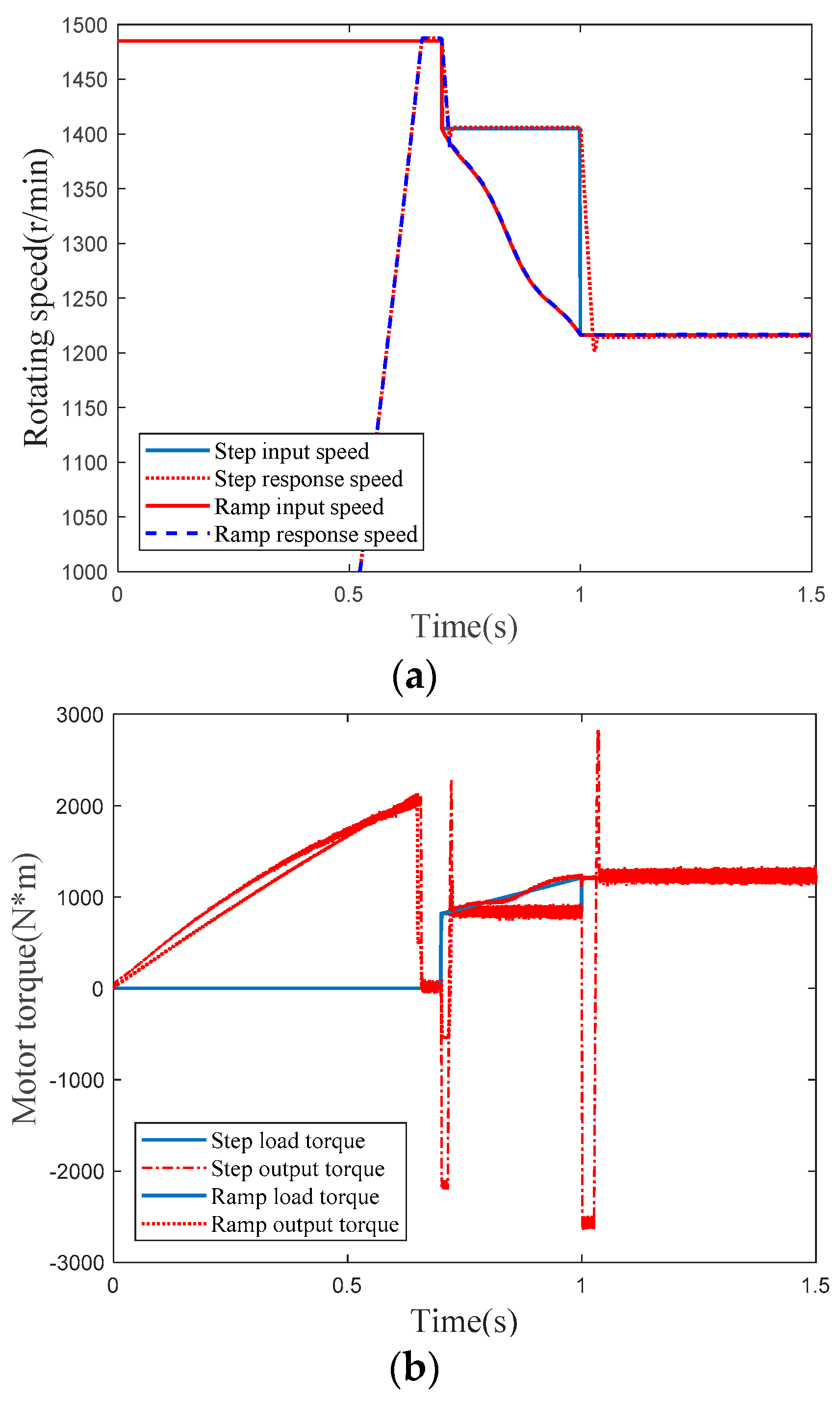
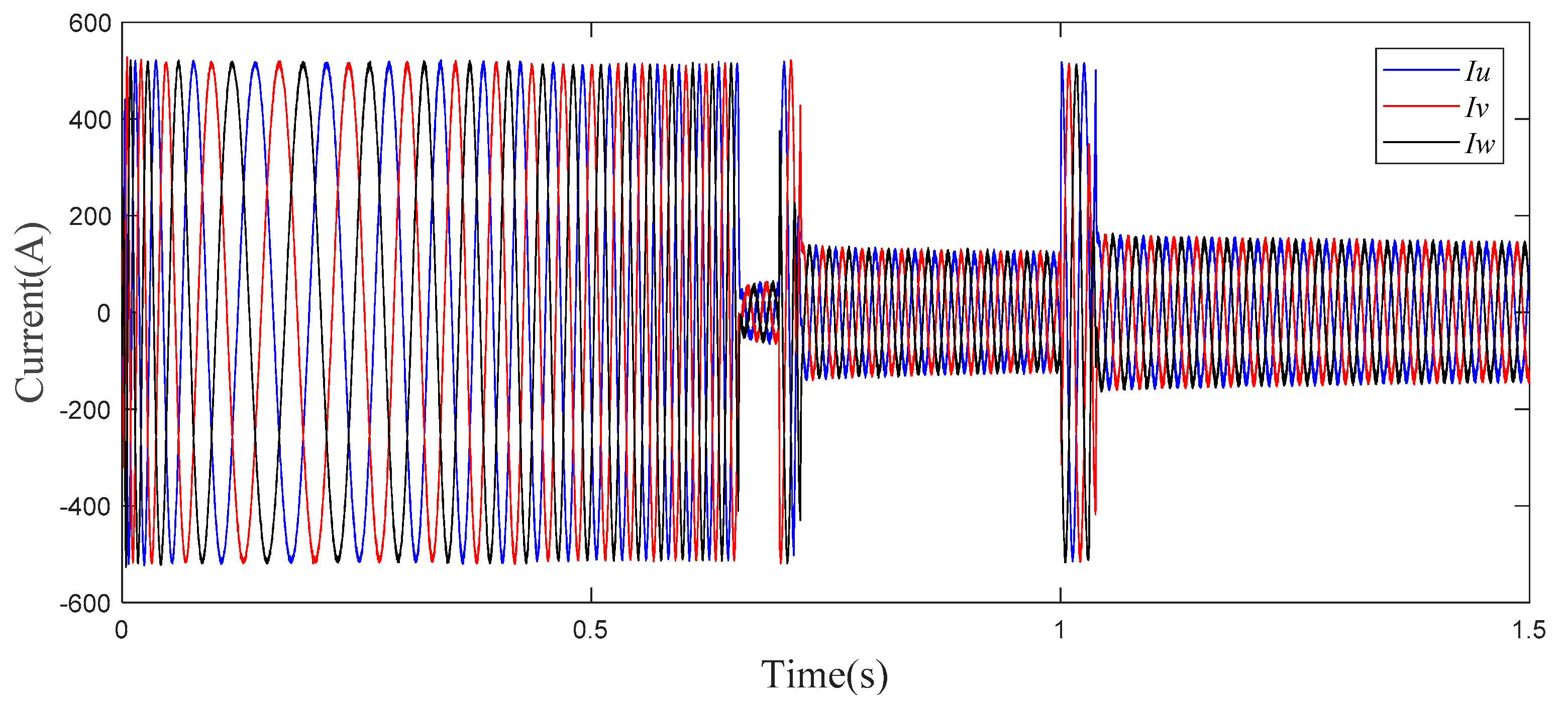
4. Adaptive Control Simulation of Roadheader
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Mężyk, A.; Pawlak, M.; Kania, J.; Klein, W. A new concept of vibration-control system in continuous miner machine. Adv. Mech. Eng. 2019, 11. [Google Scholar] [CrossRef]
- Peinsitt, T.; Haubmann, H.; Kargl, H.; Kary, C. Recent developments towards Autonomous Tunneling and Mining Machinery. In Tunnels and Underground Cities: Engineering and Innovation Meet Archaeology, Architecture and Art: Volume 6: Innovation in Underground Engineering, Materials and Equipment-Part 2; Taylor & Francis Ltd: Oxfordshire, UK, 2020; pp. 2849–2858. [Google Scholar]
- Deshmukh, S.; Raina, A.K.; Murthy, V.M.S.R.; Trivedi, R.; Vajre, R. Roadheader–A comprehensive review. Tunn. Undergr. Sptech. 2020, 95. [Google Scholar] [CrossRef]
- Menezes, P.L. Influence of rock mechanical properties and rake angle on the formation of rock fragments during cutting operation. Int. J. Adv. Manuf. Tech. 2017, 90, 127–139. [Google Scholar] [CrossRef]
- Menezes, P.L. Influence of cutter velocity, friction coefficient and rake angle on the formation of discontinuous rock fragments during rock cutting process. Int. J. Adv. Manuf. Tech. 2017, 90, 3811–3827. [Google Scholar] [CrossRef]
- Liu, X.; Tang, P.; Geng, Q.; Li, X.; Tian, M. Numerical research on wear mechanisms of conical cutters based on rock stress state. Eng. Fail. Anal. 2019, 97, 274–287. [Google Scholar] [CrossRef]
- Wang, X.; Su, O. Specific energy analysis of rock cutting based on fracture mechanics: A case study using a conical pick on sandstone. Eng. Fract. Mech. 2019, 213, 197–205. [Google Scholar] [CrossRef]
- Zhang, D.; Liu, S.; Jia, J. Influence of Motion Parameters on Cutting Performance of Boom-Type Roadheader during the Swing Cutting. Arab. J. Sci. Eng. 2020, 1–11. [Google Scholar] [CrossRef]
- Yang, W.L.; Wang, Z.B.; Yan, B.L. Research on the Adaptive Cutting Method of Roadheader. Appl. Mech. Mater. 2013, 268, 1436–1439. [Google Scholar] [CrossRef]
- Wang, H.; Zhang, Q. Dynamic identification of coal-rock interface based on adaptive weight optimization and multi-sensor information fusion. Inform Fusion. 2019, 51, 114–128. [Google Scholar] [CrossRef]
- Faradonbeh, R.S.; Salimi, A.; Monjezi, M.; Ebrahimabadi, A.; Moormann, C. Roadheader performance prediction using genetic programming (GP) and gene expression programming (GEP) techniques. Environ. Earth. Sci. 2017, 76, 1–12. [Google Scholar] [CrossRef]
- Dolipski, M.; Cheluszka, P.; Sobota, P. Investigating the simulated control of the rotational speed of roadheader cutting heads, relating to the reduction of energy consumption during the cutting process. J. Min. Sci. 2015, 51, 298–308. [Google Scholar] [CrossRef]
- Wang, H.; Lu, S.; Huang, M.; Zhao, X. Hardness identification of rock based on multi-sensor information fusion during the process of roadway tunnelling. Bull. Pol. Acad Sci. Tech. Sci. 2020, 1301–1309. [Google Scholar] [CrossRef]
- Gao, J.; Wang, S.Y.; Li, R.; Zhu, X.P.; Gao, F.; Du, Y.B.; Wu, M. Design of new-type electric control system based on power panel and PCC for boom-type roadheader. IEEE Int. Conf. Mech. Autom. Control Eng. 2011, 1202–1205. [Google Scholar] [CrossRef]
- Wang, P.; Shen, Y.; Li, R.; Zong, K.; Fu, S.; Wu, M. Multisensor information-based adaptive control method for cutting head speed of roadheader. Proc. Inst. Mech. Eng. Part C: J. Mech. Eng. Sci. 2020. [Google Scholar] [CrossRef]
- Zhao, J.; Yu, Z.; Ren, S. The space vector control system design of the cross section cutting based on the fuzzy PID algorithm in the coal mine. IEEE Int. Conf. Mech. Autom. 2016, 743–747. [Google Scholar] [CrossRef]
- Cheluszka, P.; Sobota, P.; Głuszek, G. Studies of behaviour of the automatic control system of roadheader cutting heads movement. MATEC Web Conf. EDP Sci. 2019. [Google Scholar] [CrossRef]
- Shi, H.; Dong, X.; Zhang, N.; Ding, N. Research of Dynamic Load Identification for Rock Roadheader. IEEE Proc. Int. Conf. Prog. Inf. Comput. 2018, 158–162. [Google Scholar] [CrossRef]
- Li, X.; Huang, B.; Ma, G.; Zeng, Q. Study on roadheader cutting load at different properties of coal and rock. Sci. World J. 2013. [Google Scholar] [CrossRef]
- Zhao, L.J.; Guan, Q.Z. Virtual assembly and load simulation of roadheader cutting head. Adv. Mater. Res. 2011, 156, 754–758. [Google Scholar] [CrossRef]
- Li, X.; Lv, Y.; Xu, S.; Zeng, Q.; Huang, B. Optimization design for roadheader cutting head by orthogonal experiment and finite element analysis. Teh. Vjesn. 2016, 23, 707–714. [Google Scholar] [CrossRef][Green Version]
- Zhao, B.; Zong, X.M.; He, B.; Zhang, L.J. Multi Variable Multi Objective Optimization for the Cutting Head of Roadheader. Appl. Mech. Mater. 2014, 635, 358–364. [Google Scholar] [CrossRef]
- Li, X.; Liu, Z.; Wang, D.; Li, Y. Parameter Optimization Design of Hard Rock Roadheader Cutting Head Based on PSO. IEEE Proc. Int. Conf. Comput. Appl. Syst. Model. 2012, 677–680. [Google Scholar] [CrossRef]
- Wang, Y.; Zou, L.; Zhao, Z.; Bai, X. H∞ fuzzy PID control for discrete time-delayed TS fuzzy systems. Neurocomputing 2019, 332, 91–99. [Google Scholar] [CrossRef]
- Fan, B.; Yang, Z.X.; Wang, X.B.; Song, L.; Song, S.Z. Model reference adaptive vector control for induction motor without speed sensor. Adv. Mech. Eng. 2017. [Google Scholar] [CrossRef]
- Mubarok, M.S.; Liu, T.H.; Tsai, C.Y.; Wei, Z.Y. A Wide-Adjustable Sensorless IPMSM Speed Drive Based on Current Deviation Detection under Space-Vector Modulation. Energies 2020, 13, 4431. [Google Scholar] [CrossRef]
- Han, H.; Liu, Y.; Ma, L.; Liu, Z.; Quan, L. Analyze the characteristics of electro-hydraulic servo system’s position-pressure master-slave control. Adv. Mech. Eng. 2018. [Google Scholar] [CrossRef]
- Yang, Y.; Li, G.; Yuan, A. Performance analysis of a hybrid power cutting system for roadheader. Math. Probl. Eng. 2017. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | kT | kg | ky | t | Sj | C1 | C2 | C3 | m |
|---|---|---|---|---|---|---|---|---|---|
| Value | 1.5 | 1.221 | 0.65 | 30 | 20 | 1 | 0.2 | 0.1 | 3 |
| Pick | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 |
| (°) | 0 | 85 | 228 | 37 | 132 | 265 | 74 | 169 | 302 | 111 | 206 | 339 |
| ri (mm) | 560 | 560 | 560 | 559 | 553 | 543 | 533 | 523 | 513 | 503 | 493 | 483 |
| Pick | 13 | 14 | 15 | 16 | 17 | 18 | 19 | 20 | 21 | 22 | 23 | 24 |
| (°) | 148 | 243 | 16 | 185 | 280 | 53 | 222 | 317 | 90 | 259 | 354 | 127 |
| ri (mm) | 473 | 464 | 455 | 446 | 437 | 428 | 419 | 410 | 399 | 386 | 371 | 354 |
| Pick | 25 | 26 | 27 | 28 | 29 | 30 | 31 | 32 | 33 | 34 | 35 | 36 |
| (°) | 296 | 33 | 166 | 338 | 81 | 215 | 31 | 146 | 280 | 95 | 217 | 356 |
| ri (mm) | 335 | 315 | 294 | 270 | 247 | 222 | 195 | 168 | 140 | 110 | 80 | 50 |
| Pk (MPa) | 350 | 490 | 650 | 800 | 1000 | 1300 |
|---|---|---|---|---|---|---|
| Current (A) | 96 | 105 | 133 | 156 | 170 | 203 |
| Pressure (MPa) | 9.8 | 10.3 | 10.8 | 11.28 | 11.73 | 12.6 |
| Pk = 350 (MPa) | N(r/min) | V(m/min) | |||||
|---|---|---|---|---|---|---|---|
| Before optimization | 50 | 2.5 | 0.0117 | 0.0612 | 0.0236 | 0.0106 | 1.017 |
| After optimization | 48.28 | 2.43 | 0.011 | 0.0583 | 0.0215 | 0.0102 | 0.9136 |
| Pk (MPa) | 350 | 490 | 650 | 800 | 1000 | 1300 |
|---|---|---|---|---|---|---|
| N (r/min) | 48.28 | 43.96 | 40.15 | 38 | 36.91 | 34.17 |
| V (m/min) | 2.43 | 2.18 | 1.92 | 1.7 | 1.508 | 1.38 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Q.; Lu, C.; Liu, T.; Xu, Z. Adaptive Cutting Control for Roadheaders Based on Performance Optimization. Machines 2021, 9, 46. https://doi.org/10.3390/machines9030046
Liu Q, Lu C, Liu T, Xu Z. Adaptive Cutting Control for Roadheaders Based on Performance Optimization. Machines. 2021; 9(3):46. https://doi.org/10.3390/machines9030046
Chicago/Turabian StyleLiu, Qingyun, Chao Lu, Tao Liu, and Zhangbao Xu. 2021. "Adaptive Cutting Control for Roadheaders Based on Performance Optimization" Machines 9, no. 3: 46. https://doi.org/10.3390/machines9030046
APA StyleLiu, Q., Lu, C., Liu, T., & Xu, Z. (2021). Adaptive Cutting Control for Roadheaders Based on Performance Optimization. Machines, 9(3), 46. https://doi.org/10.3390/machines9030046