
Analytical Study on the Cornering Behavior of an Articulated Tracked Vehicle †




Abstract
1. Introduction
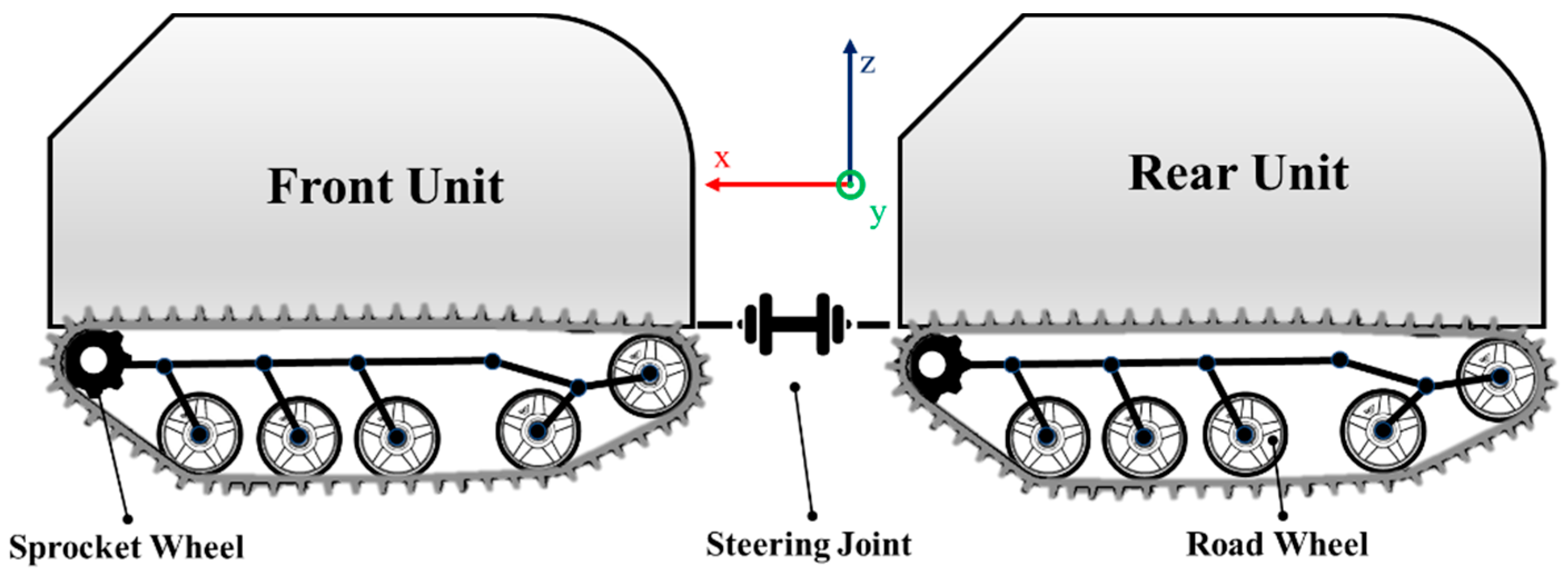
2. ATV Non-Linear Mathematical Model
- the two units are considered as rigid bodies with mass and and moment of inertia around the vertical axis through the center of gravity (CoG) and ;
- the road is considered rigid and flat (the effect of terrain slopes or sinkage is neglected);
- the continuous track–terrain contact force distribution is discretized with four contact points for each track;
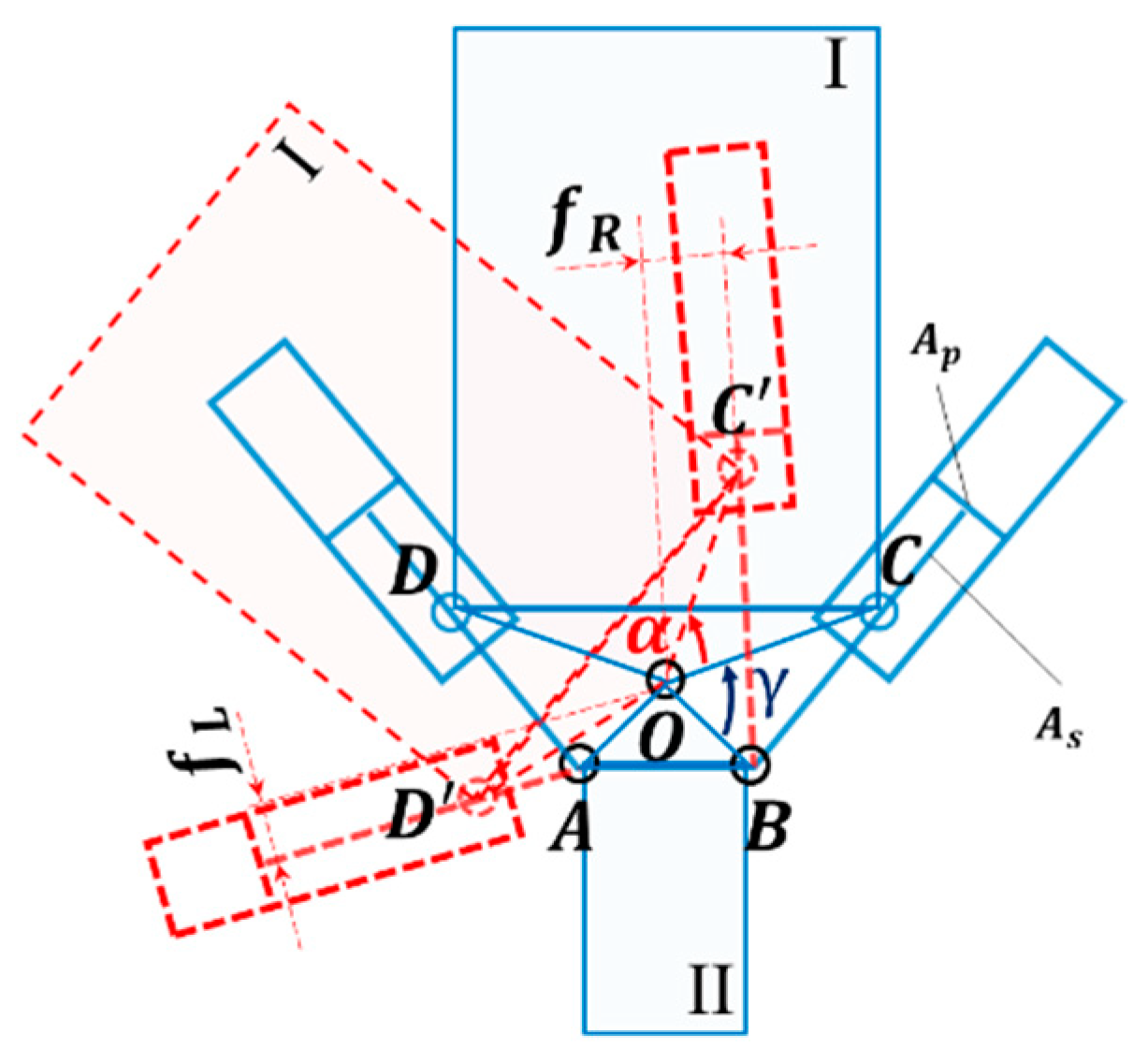
- the steering joint is considered as an ideal yaw rotational hinge placed at a distance of from the front CoG and from the rear CoG;
- the front and rear tracks width is equal to ;
- the number of road wheels is for each track;
- flexible deformation of the tracks is not considered.
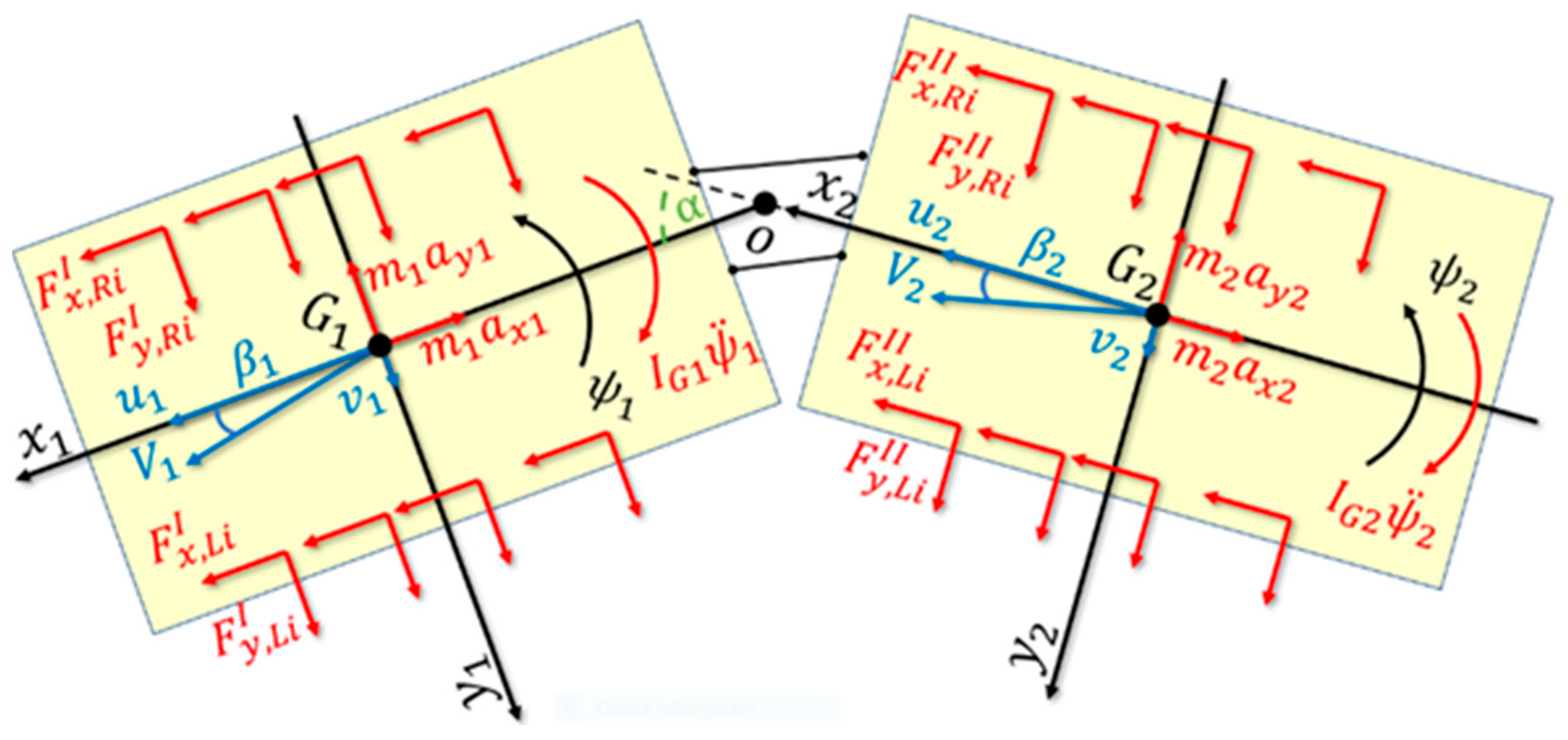
2.1. Rigid Bodies Dynamics
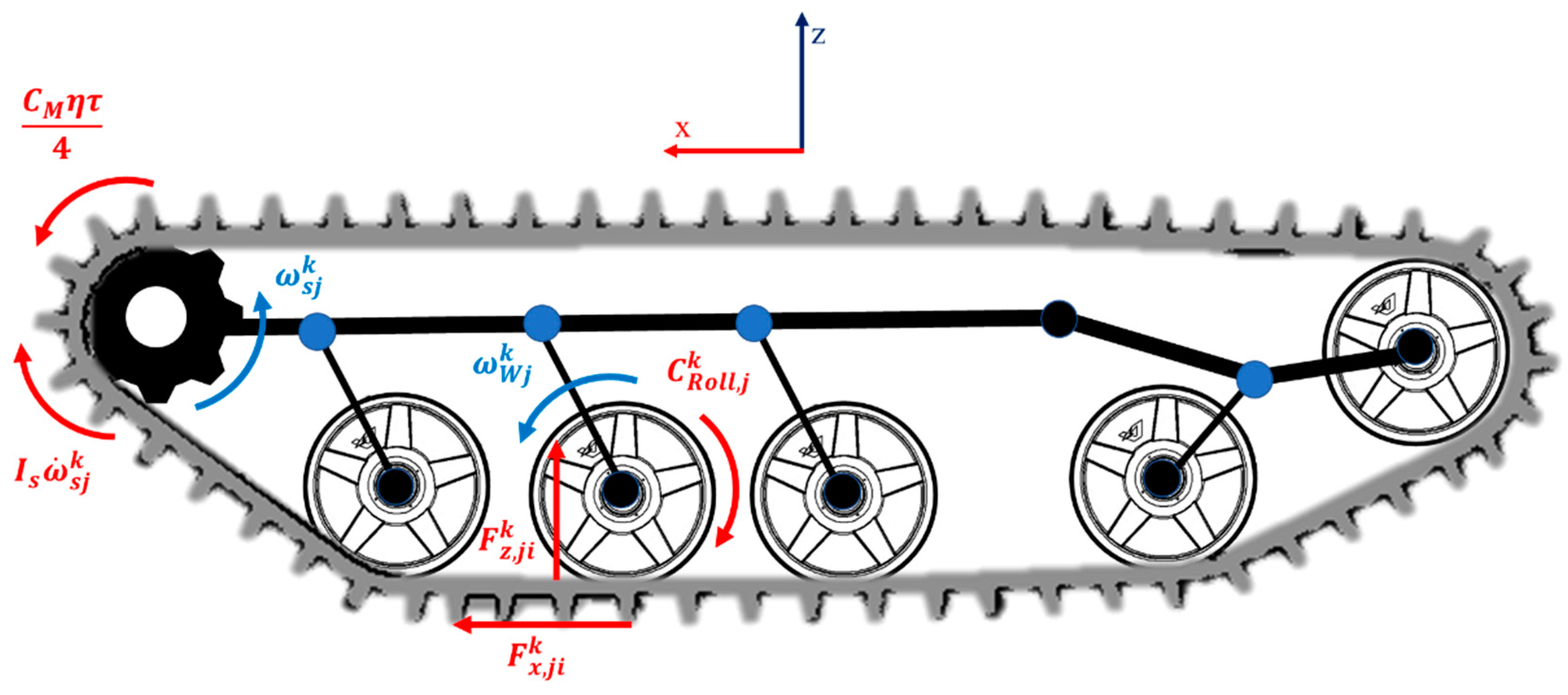
2.2. Track Angular Dynamics
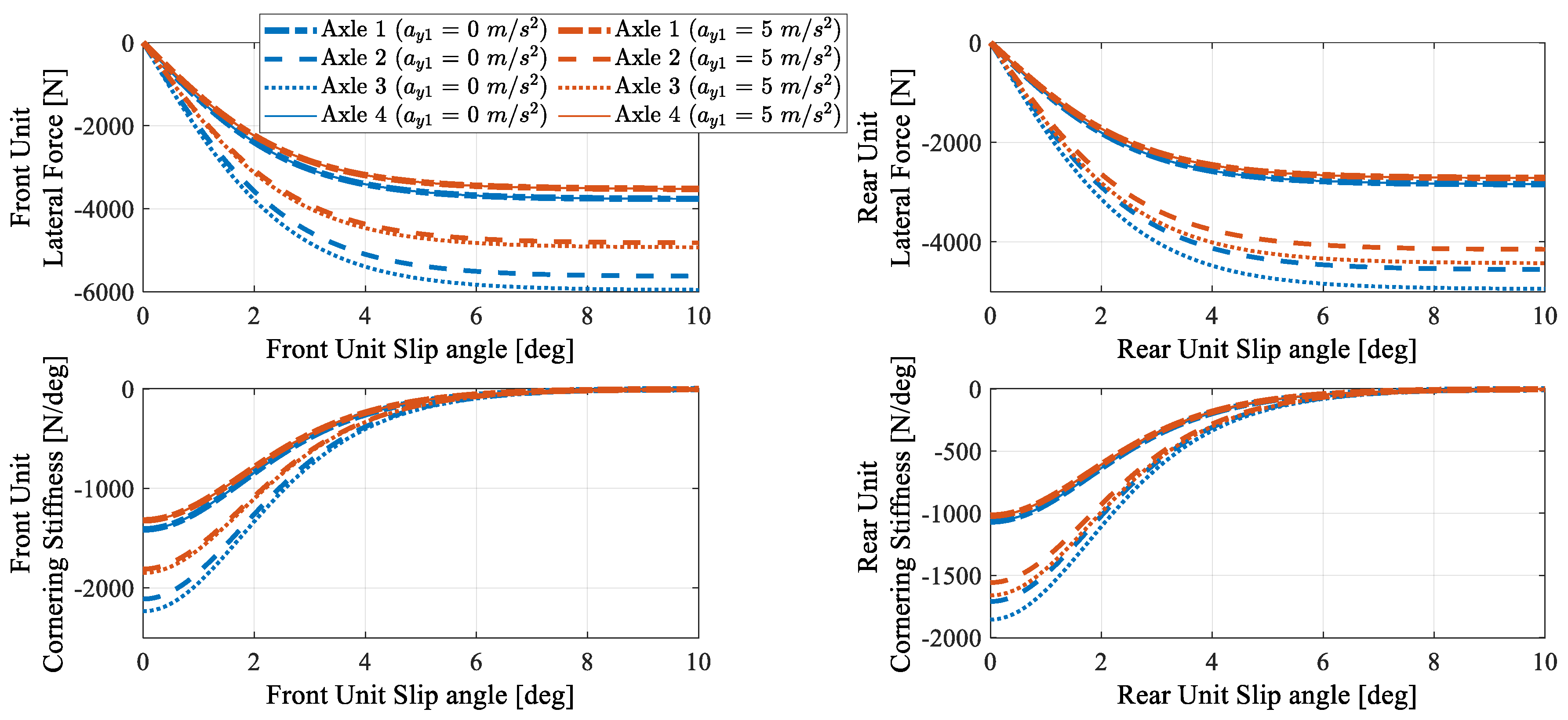
2.3. Track–Terrain Contact Model
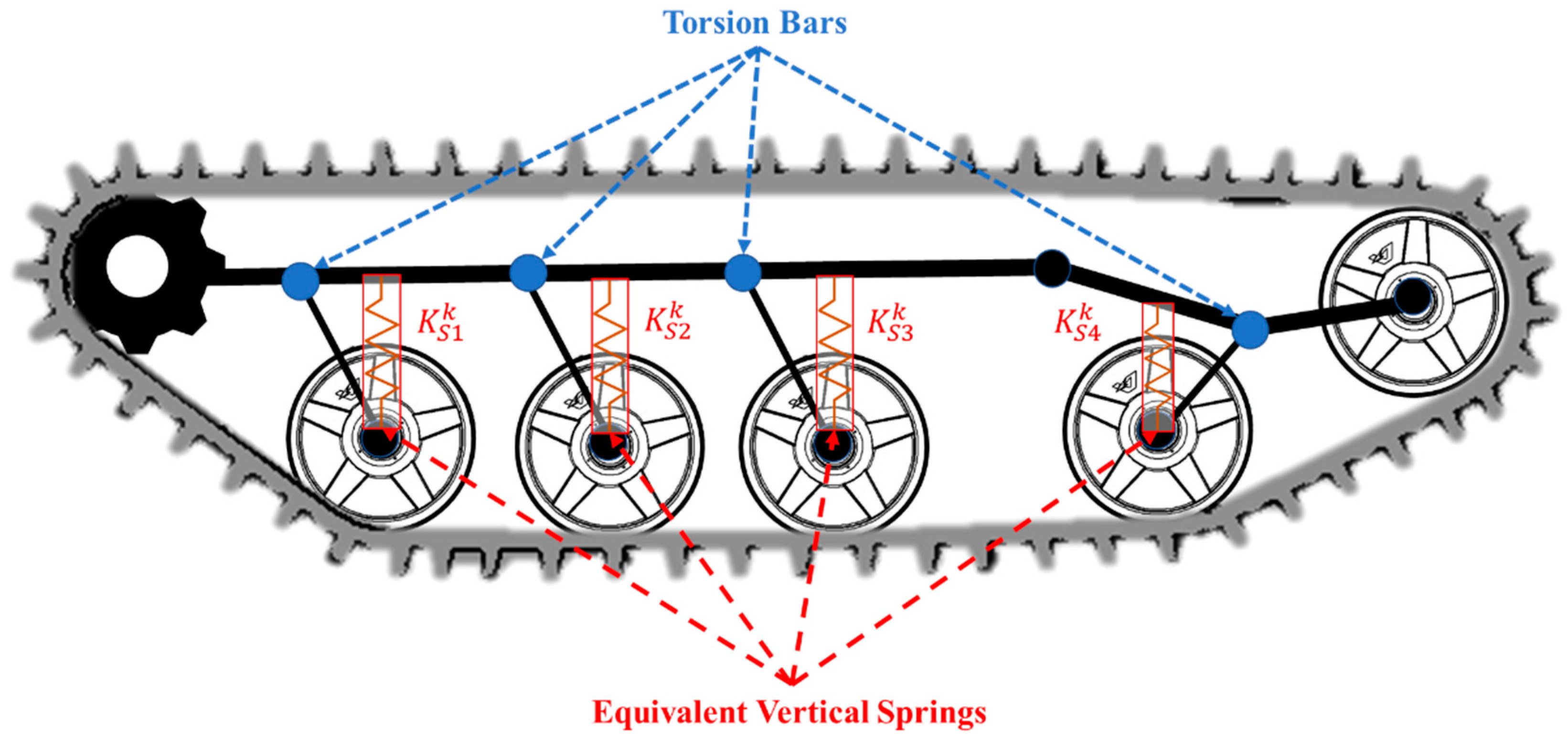
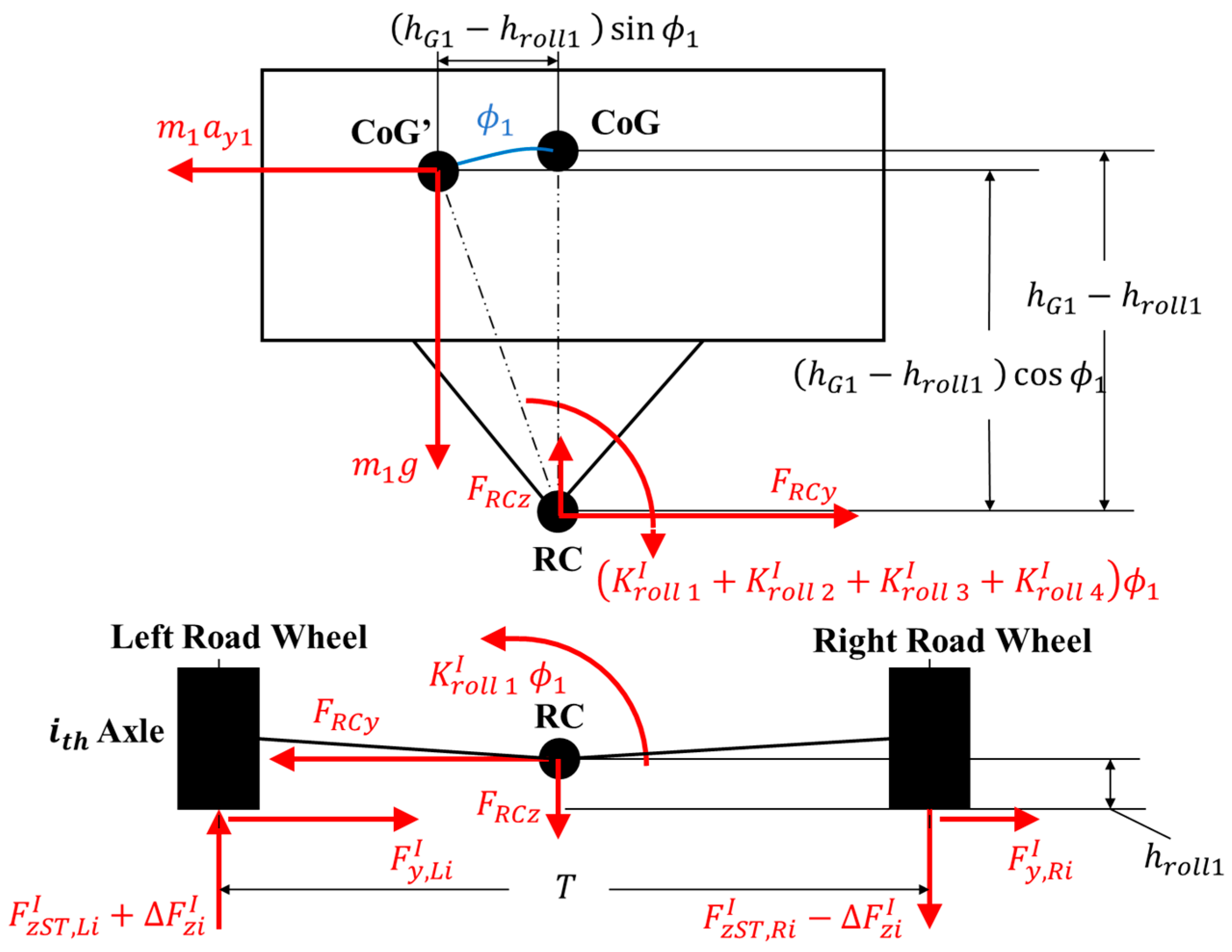
2.4. Dynamic Vertical Forces
- Each suspension torsion bar is modeled with a linear characteristic of the equivalent spring deflection.
- Each equivalent spring has no static preload.
- The static deflection is equal for each spring of the same unit (no static pitch and/or roll).
- The corresponding right and left springs of each unit’s axle share the same stiffness value.
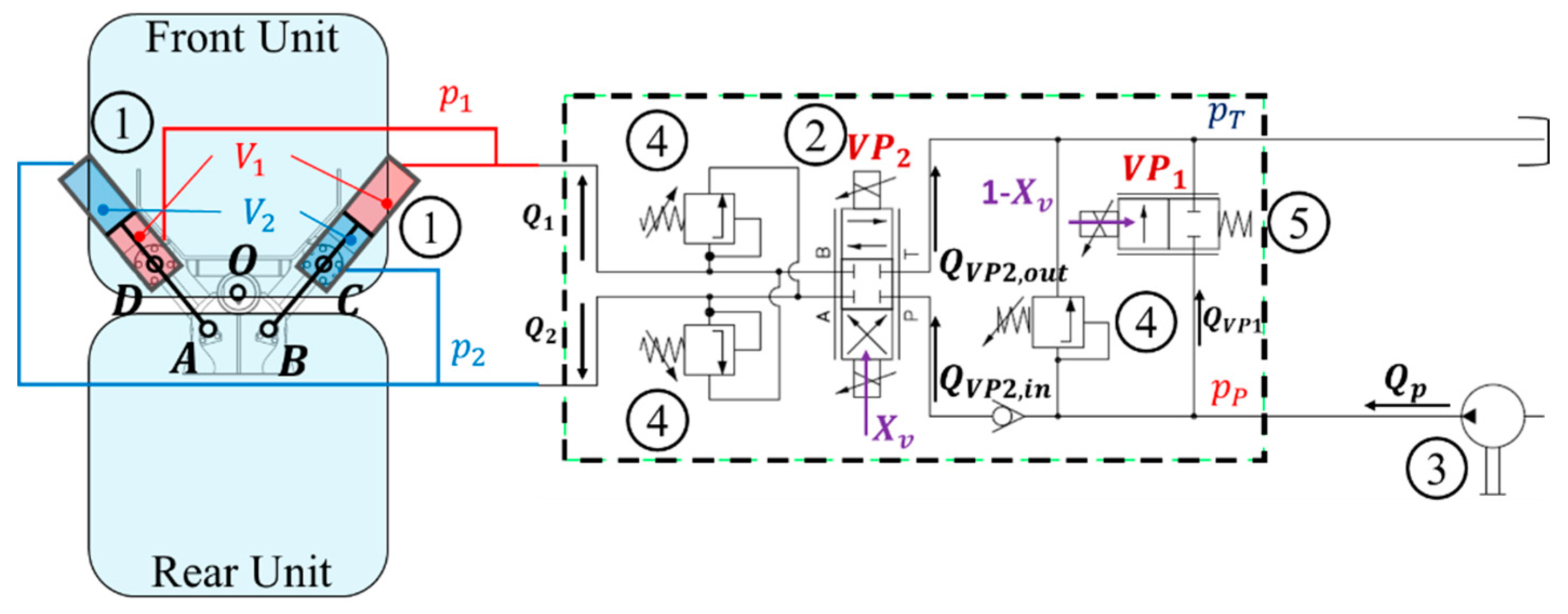
2.5. Hydraulic Steering System
2.6. Stable Equilibrium Points
3. Linearized ATV Lateral Dynamics Model
- 1.
- Decoupled lateral and longitudinal dynamics: only Equations (2)–(4) are considered for the linearized ATV model and
- 2.
- Neglected longitudinal acceleration and rear unit longitudinal force ;
- 3.
- The longitudinal speed of the front unit is considered a time-independent quantity: is kept constant during each simulation/maneuver.
Analytical Solution for Small Lateral Accelaratons
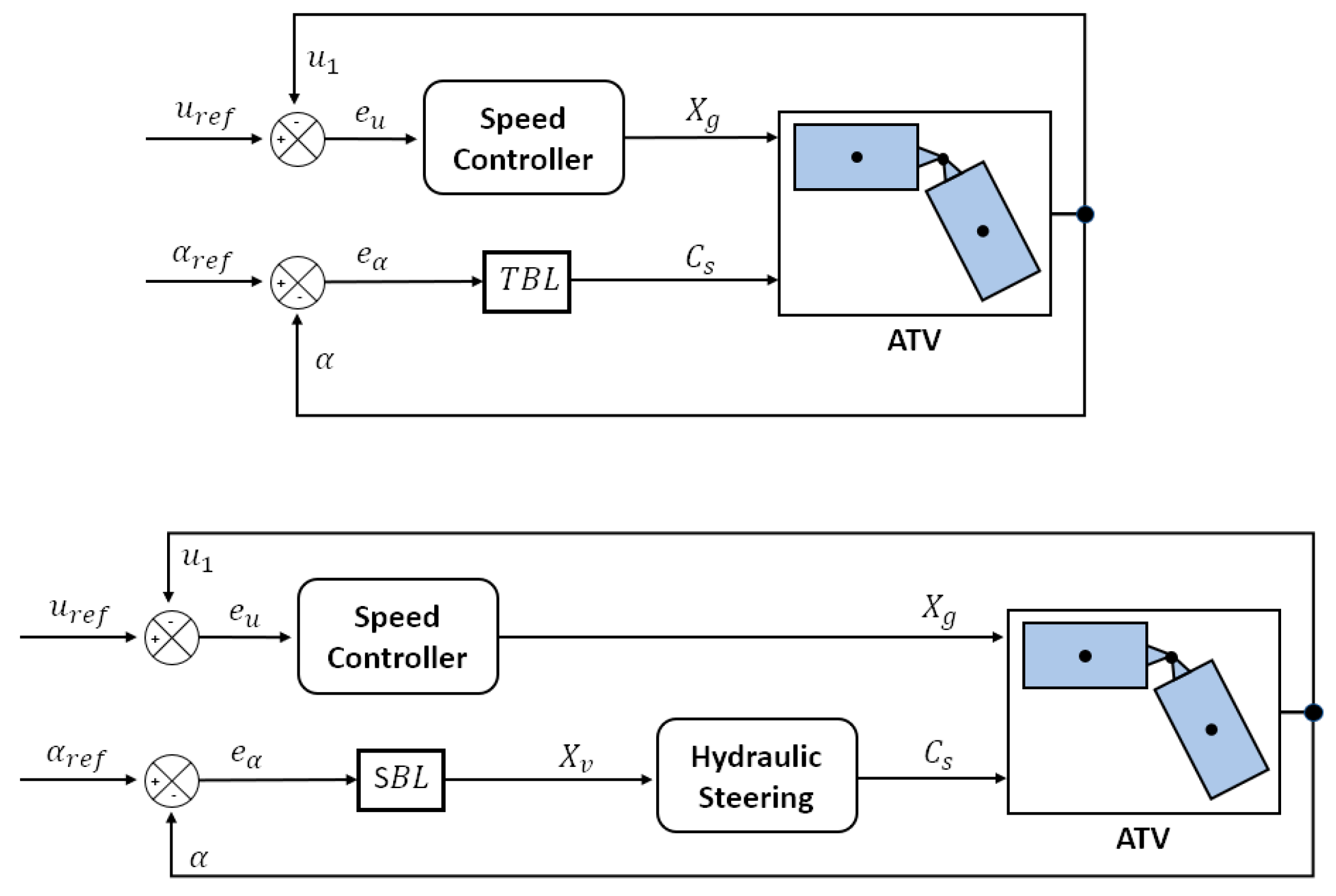
4. Hitch Angle Controller
4.1. Controller Design
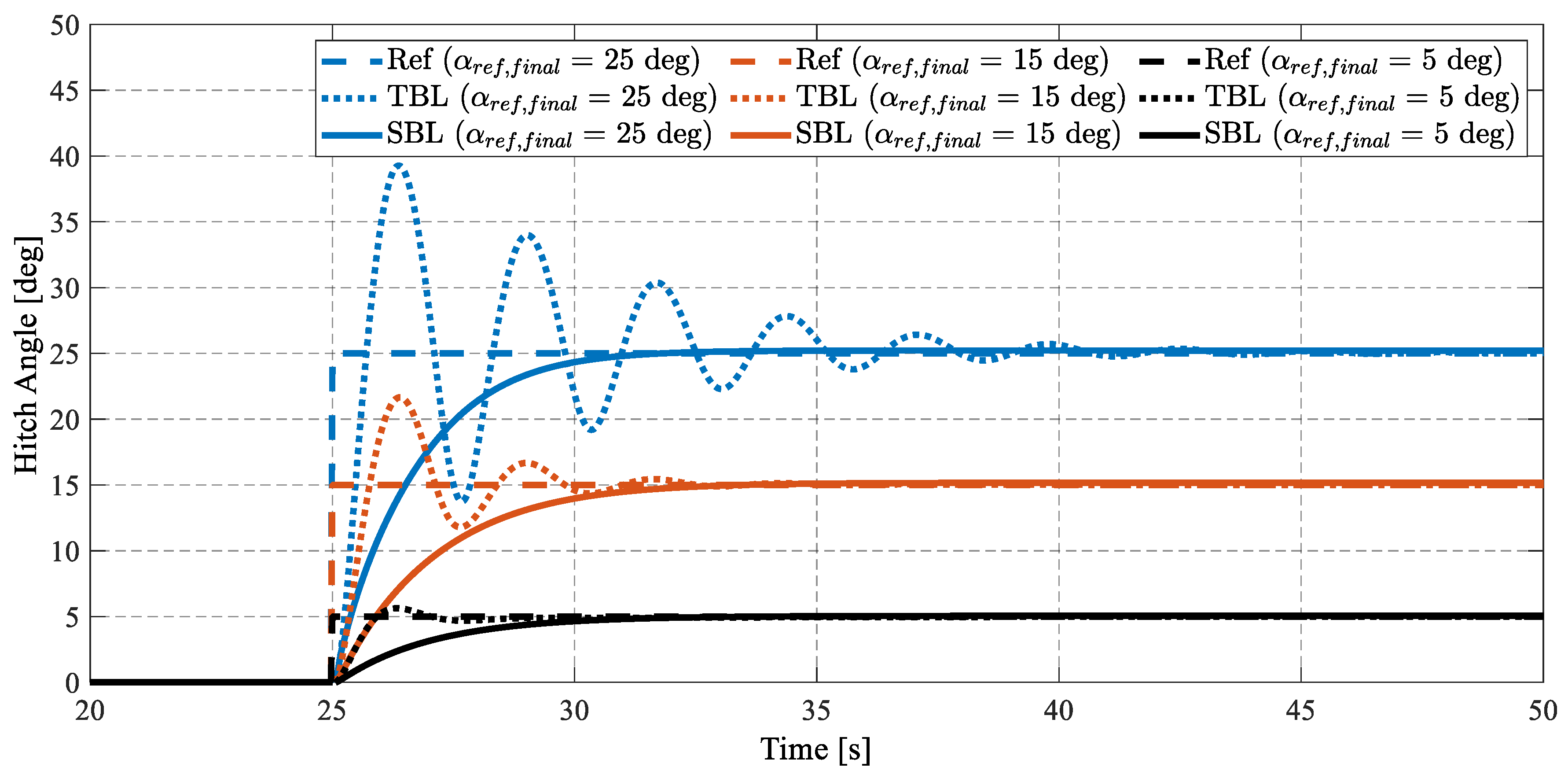
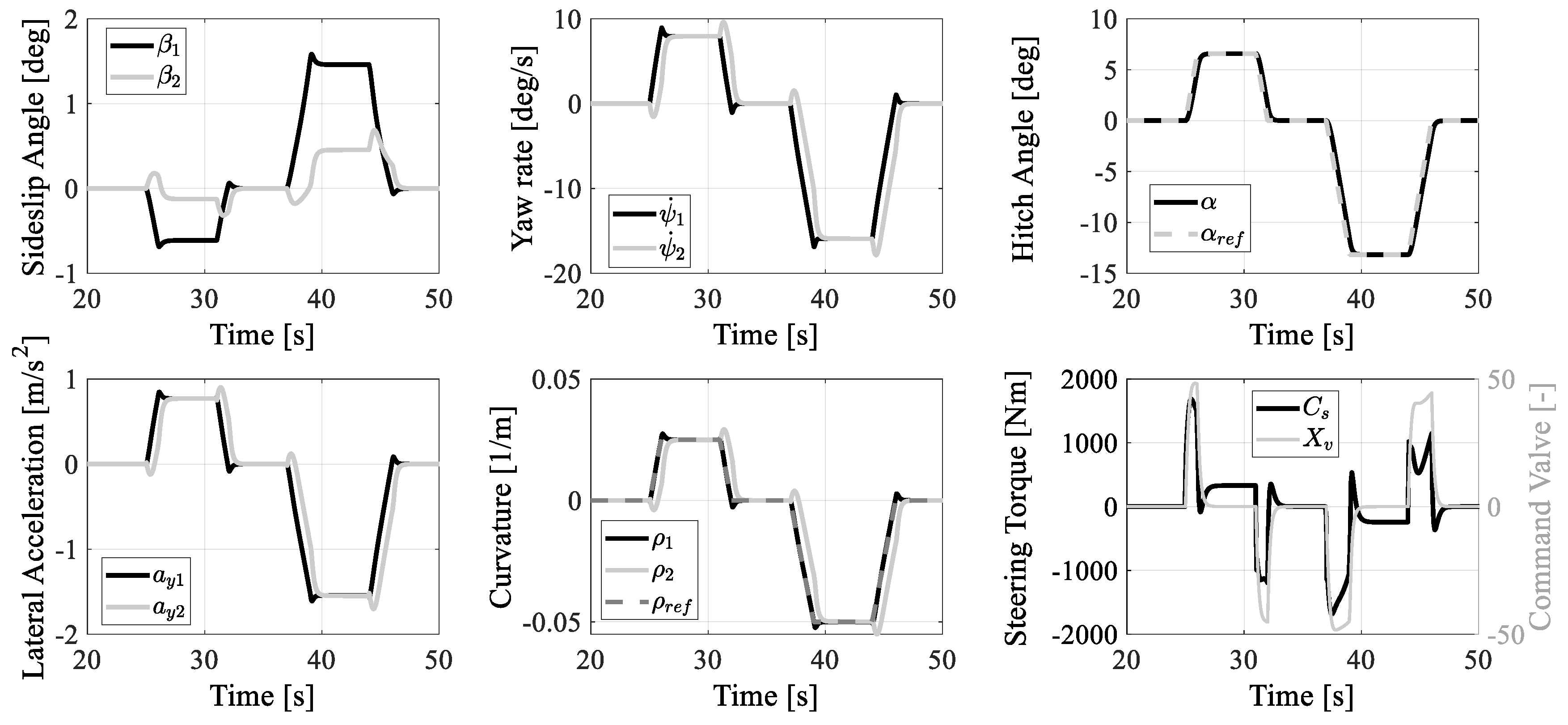
4.2. Controller Validation
5. Conclusions
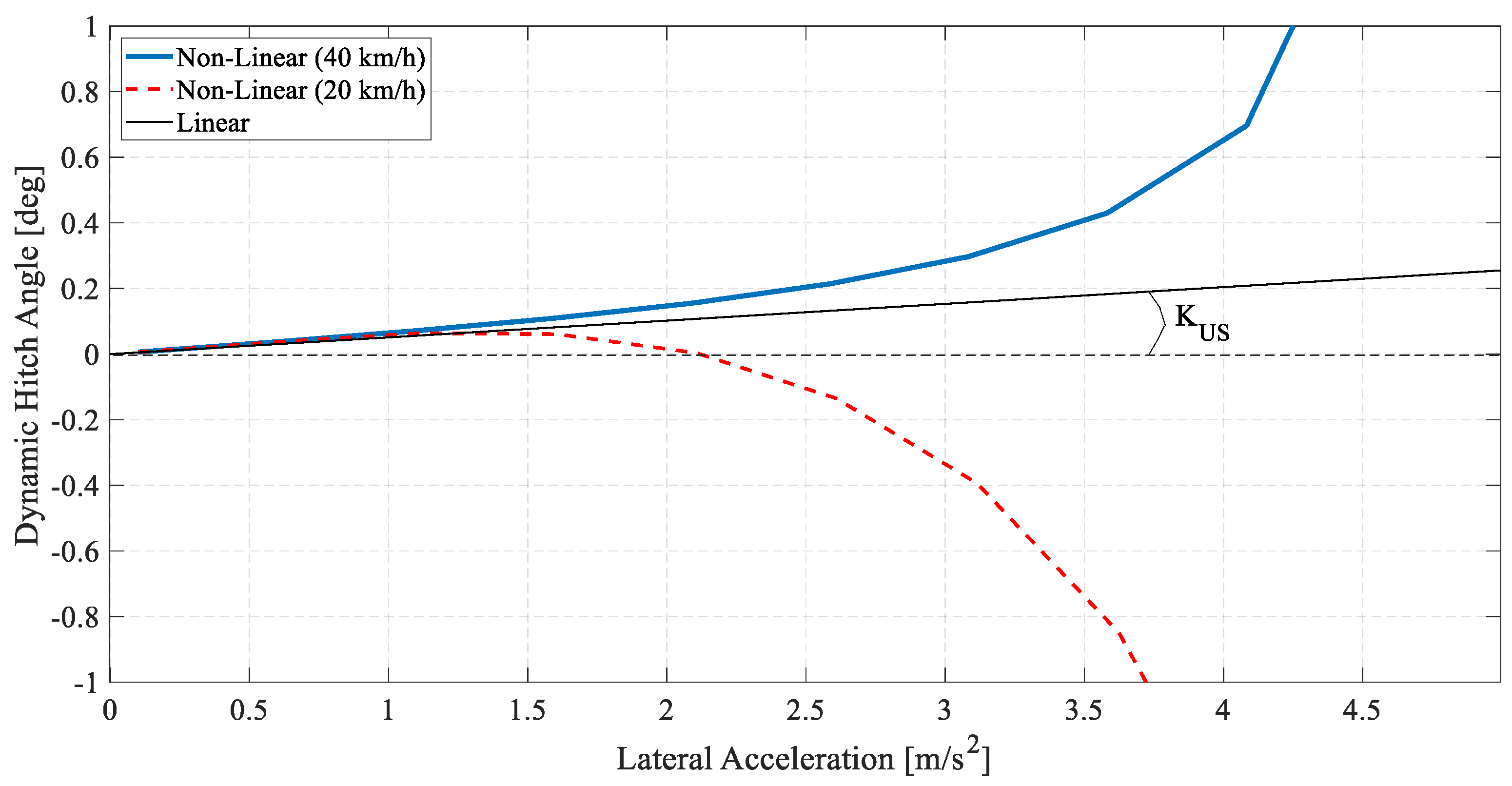
- The linearized ATV model represents a promising tool for ATV dynamics analysis only in the range of small lateral accelerations ( m/s2).
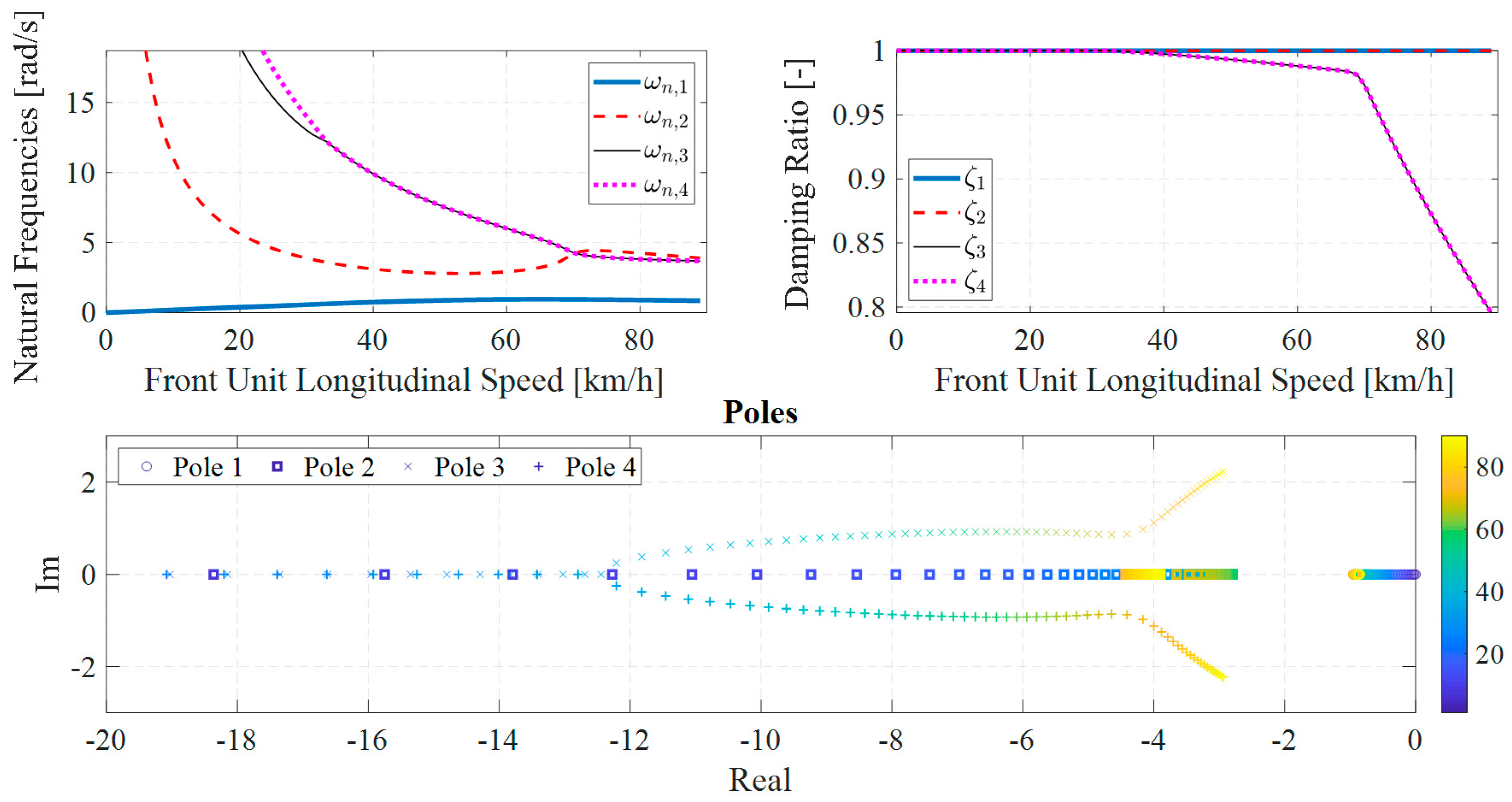
- The linearized ATV model shows a stable behavior over the whole speed operative range, and it is characterized by a “slow” open-loop dynamics due to the presence of relatively small natural frequencies.
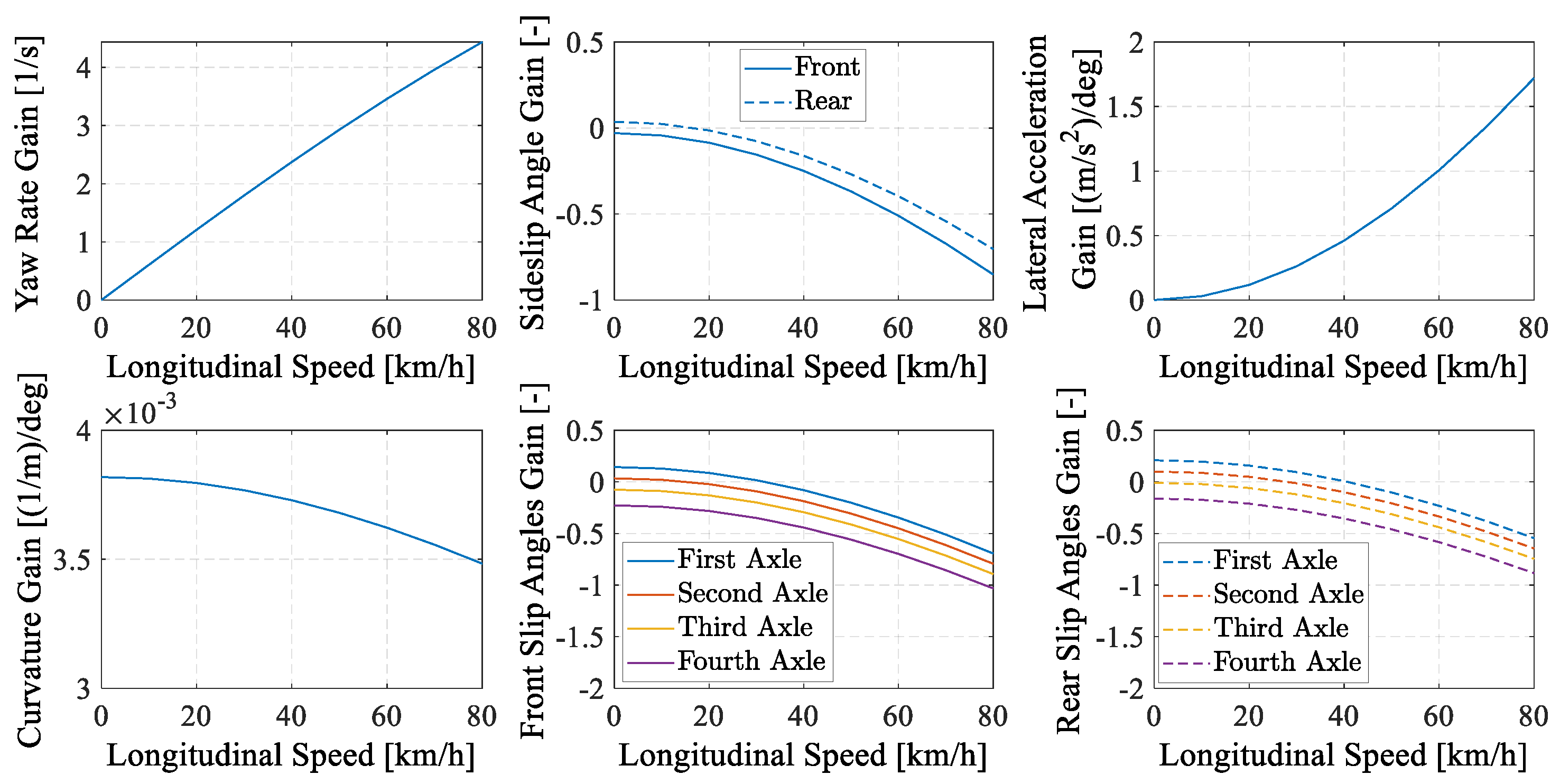
- The steady-state ATV cornering behavior for small lateral accelerations is understeering with the proposed set of vehicle parameters. This is also proven by extending to the ATV the concept behind the understeer characteristics commonly adopted for passenger cars.
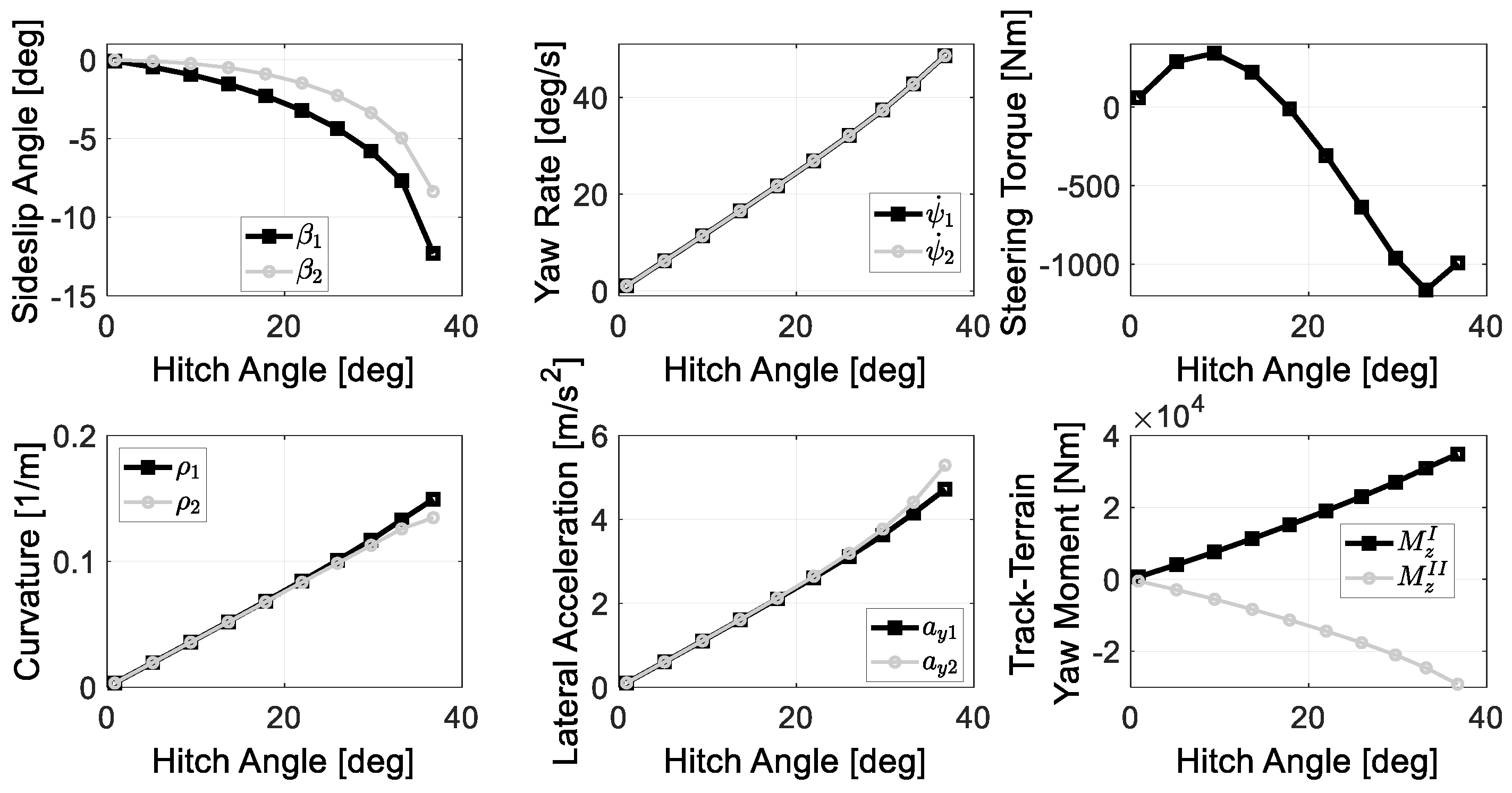
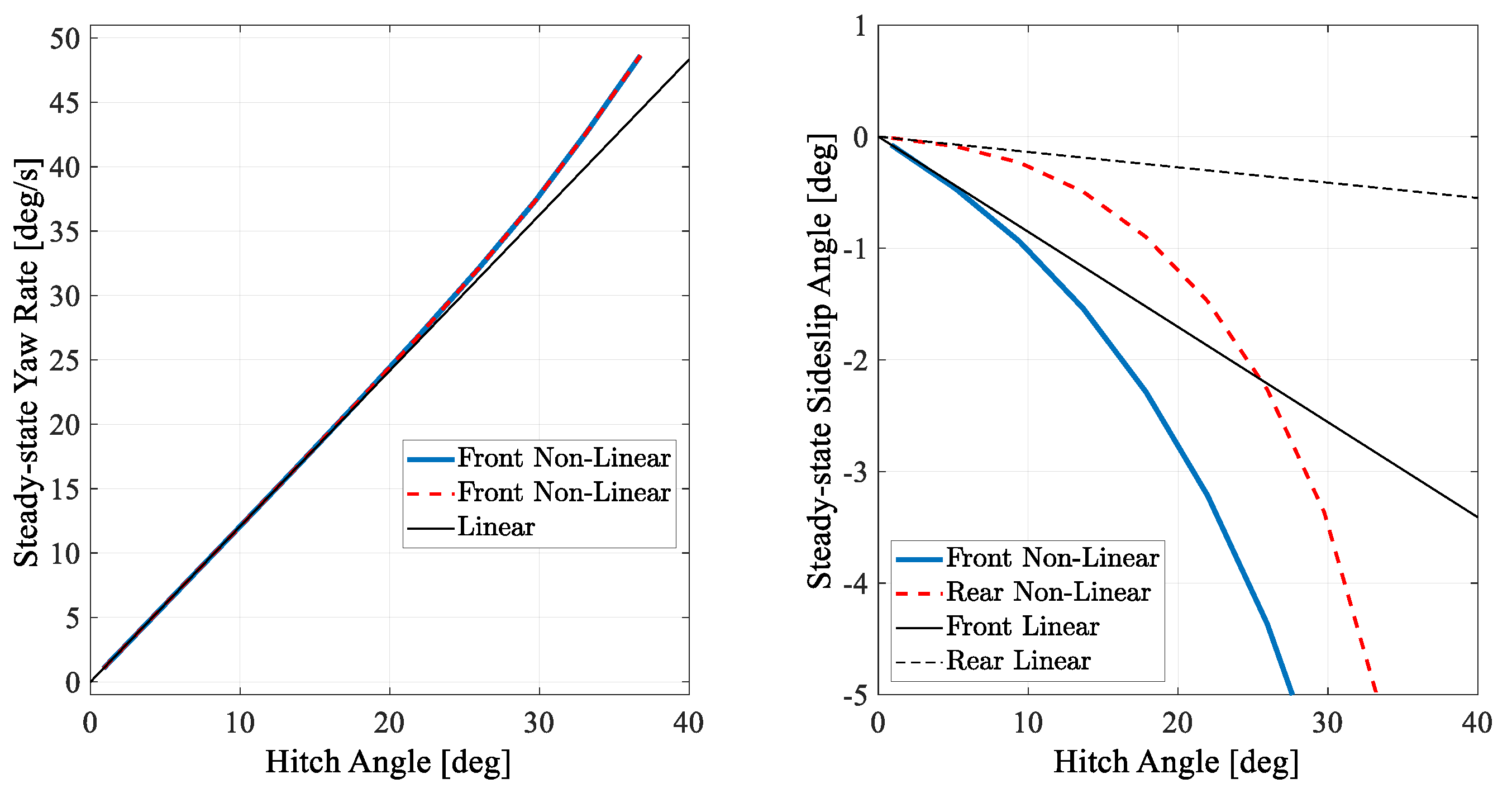
- At higher lateral accelerations, the ATV steady-state understeering attitude obtained with the non-linear model is strongly influenced by the vehicle speed. An undesteering behavior is observed for 40 km/h and an oversteering attitude is obtained for 20 km/h.
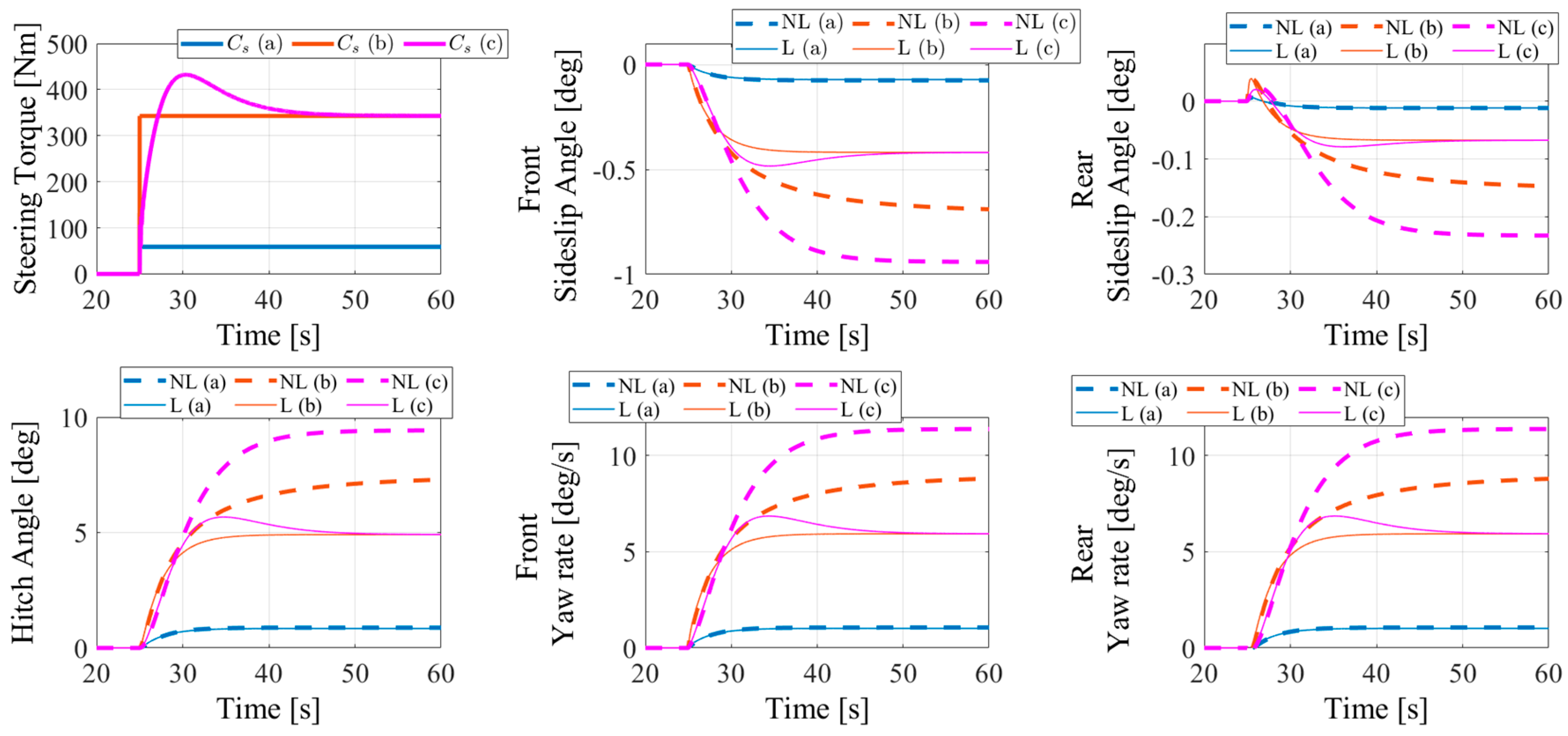
- The hitch angle controller with SBL represents a better solution if compared to the TBL, since the hydraulic steering circuit automatically adapts the pressure dynamics to the ATV load conditions without any direct steering torque regulation.
Author Contributions
Funding
Conflicts of Interest
Appendix A

References
- Maclaurin, B. A skid steering model with track pad flexibility. J. Terramechanics 2007, 44, 95–110. [Google Scholar] [CrossRef]
- Thai, T.D.; Muro, T. Numerical analysis to predict turning characteristics of rigid suspension tracked vehicle. J. Terramechanics 1999, 36, 183–196. [Google Scholar] [CrossRef]
- Loh, H.F.; Shu, J.; Tu, S.J.; Tay, C.M.; Soon, D.P.Y.; Poon, Y.C.; Leong, H.C. Articulated vehicle, an articulation device and a drive transmission. U.S. Patent No. 6,880,651, 19 April 2005. [Google Scholar]
- Wagner, S.; Nitzsche, G. Rear Carriage Steering Mechanism and Method. U.S. Patent No. 10,336,368, 2 July 2019. [Google Scholar]
- Watanabe, K.; Kitano, M. Study on steerability of articulated tracked vehicles—Part 1. Theoretical and experimental analysis. J. Terramechanics 1986, 23, 69–83. [Google Scholar] [CrossRef]
- Hohl, G.H. Military terrain vehicles. J. Terramechanics 2007, 44, 23–34. [Google Scholar] [CrossRef]
- He, Y.; Khajepour, A.; McPhee, J.; Wang, X. Dynamic modelling and stability analysis of articulated frame steer vehicles. Int. J. Heavy Veh. Syst. 2005, 12, 28–59. [Google Scholar] [CrossRef]
- Rowduru, S.; Kumar, N.; Kumar, A. A critical review on automation of steering mechanism of load haul dump machine. Proc. Inst. Mech. Eng. Part I: J. Syst. Control Eng. 2020, 234, 160–182. [Google Scholar] [CrossRef]
- Pazooki, A.; Rakheja, S.; Cao, D. Kineto-dynamic directional response analysis of an articulated frame steer vehicle. Int. J. Veh. Des. 2014, 65, 1–30. [Google Scholar] [CrossRef]
- Gao, Y.; Shen, Y.; Xu, T.; Zhang, W.; Güvenç, L. Oscillatory yaw motion control for hydraulic power steering articulated vehicles considering the influence of varying bulk modulus. IEEE Trans. Control Syst. Technol. 2018, 27, 1284–1292. [Google Scholar] [CrossRef]
- Tota, A.; Galvagno, E.; Velardocchia, M.; Vigliani, A. Passenger car active braking system: Model and experimental validation (Part I). Proc. Inst. Mech. Eng. Part C: J. Mech. Eng. Sci. 2018, 232, 585–594. [Google Scholar] [CrossRef]
- Galvagno, E.; Tota, A.; Vigliani, A.; Velardocchia, M. Pressure Following Strategy for Conventional Braking Control Applied to a HIL Test Bench. SAE Int. J. Passeng. Cars-Mech. Syst. 2017, 10, 721–727. [Google Scholar] [CrossRef]
- Tota, A.; Galvagno, E.; Velardocchia, M.; Vigliani, A. Passenger car active braking system: Pressure control design and experimental results (part II). Proc. Inst. Mech. Eng. Part C: J. Mech. Eng. Sci. 2018, 232, 786–798. [Google Scholar] [CrossRef]
- Liu, J.Y.; Tan, J.Q.; Mao, E.R.; Song, Z.H.; Zhu, Z.X. Proportional directional valve based automatic steering system for tractors. Front. Inf. Technol. Electron. Eng. 2016, 17, 458–464. [Google Scholar] [CrossRef]
- Ridley, P.; Corke, P. Load haul dump vehicle kinematics and control. J. Dyn. Syst. Meas. Control 2003, 125, 54–59. [Google Scholar] [CrossRef]
- Dong, C.; Cheng, K.; Hu, W.; Yao, Y. Dynamic modelling of the steering performance of an articulated tracked vehicle using shear stress analysis of the soil. Proc. Inst. Mech. Eng. Part D: J. Automob. Eng. 2017, 231, 653–683. [Google Scholar] [CrossRef]
- Yao, Y.; Cheng, K.; Zhang, B.; Lin, J.; Jiang, D.; Gao, Z. A steering model for articulated tracked vehicle considering soil deformation on track–soil interaction. Adv. Mech. Eng. 2018, 10, 1–11. [Google Scholar] [CrossRef]
- Tota, A.; Velardocchia, M.; Rota, E.; Novara, A. Steering Behavior of an Articulated Amphibious All-Terrain Tracked Vehicle. SAE Tech. Pap. 2020. [Google Scholar] [CrossRef]
- Tota, A.; Galvagno, E.; Velardocchia, M.; Rota, E.; Novara, A. Articulated Steering Control for an All-Terrain Tracked Vehicle. In Proceedings of the International Conference of IFToMM ITALY, Naples, Italy, 9–11 September 2020; Springer: Cham, Switzerland, 2020; Volume 91, pp. 823–830. [Google Scholar]
- Cui, D.; Wang, G.; Zhao, H.; Wang, S. Research on a Path-Tracking Control System for Articulated Tracked Vehicles. Stroj. Vestn. J. Mech. Eng. 2020, 66, 311–324. [Google Scholar] [CrossRef]
- Galvagno, E.; Rondinelli, E.; Velardocchia, M. Electro-mechanical transmission modelling for series-hybrid tracked tanks. Int. J. Heavy Veh. Syst. 2012, 19, 256–280. [Google Scholar] [CrossRef]
- Wu, J.; Wang, G.; Zhao, H.; Sun, K. Study on electromechanical performance of steering of the electric articulated tracked vehicles. J. Mech. Sci. Technol. 2019, 33, 3171–3185. [Google Scholar] [CrossRef]
- Guercioni, G.R.; Galvagno, E.; Tota, A.; Vigliani, A.; Zhao, T. Driveline backlash and half-shaft torque estimation for electric powertrains control. SAE Tech. Pap. 2018. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Quantity | Value | Description |
|---|---|---|
| 3440 kg | Front unit mass | |
| 2440 kg | Rear unit mass | |
| 4472 kg m2 | Front unit moment of inertia around | |
| 3172 kg m2 | Rear unit moment of inertia around | |
| 2.09 m | Front CoG distance from the steering joint | |
| 2.18 m | Rear CoG distance from the steering joint | |
| 0.79 m | Front axle 1 distance from the front CoG | |
| 0.29 m | Front axle 2 distance from the front CoG | |
| −0.21 m | Front axle 3 distance from the front CoG | |
| −0.90 m | Front axle 4 distance from the front CoG | |
| 0.79 m | Rear axle 1 distance from the rear CoG | |
| 0.29 m | Rear axle 2 distance from the rear CoG | |
| −0.21 m | Rear axle 3 distance from the rear CoG | |
| −0.90 m | Rear axle 4 distance from the rear CoG | |
| −0.81 × 105 N/rad | Front axle 1 cornering stiffness 1 | |
| −1.21 × 105 N/rad | Front axle 2 cornering stiffness 1 | |
| −1.28 × 105 N/rad | Front axle 3 cornering stiffness 1 | |
| −0.81 × 105 N/rad | Front axle 4 cornering stiffness 1 | |
| −0.61 × 105 N/rad | Rear axle 1 cornering stiffness 1 | |
| −0.98 × 105 N/rad | Rear axle 2 cornering stiffness 1 | |
| −1.06 × 105 N/rad | Rear axle 3 cornering stiffness 1 | |
| −0.61 × 105 N/rad | Rear axle 4 cornering stiffness 1 |
| Property | Requirement | Description |
|---|---|---|
| Rise Time | s | Time for the hitch angle to reach the 80% of the step final value |
| Settling Time | s | Time for the hitch angle to settle within a range of 1% around the step final value |
| Overshoot | % | The amount by which the hitch angle can exceed the step final value before settling |
| Undershoot | % | The amount by which the hitch angle can undershoot the step initial value |
deg | Nm/rad | Nm/(rad s) | Nm/(rad/s) | 1/rad | 1/(rad s) | 1/(rad/s) |
|---|---|---|---|---|---|---|
| 29093 | 5176 | −1223.5 | 2.0418 | 0.0121 | −0.09323 | |
| 21178 | 2591.5 | 1036.2 | 2.2987 | 0.0131 | −0.1525 | |
| 6345.1 | −265.3351 | 2315.5 | 2.1310 | 0.0119 | −0.1759 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tota, A.; Galvagno, E.; Velardocchia, M. Analytical Study on the Cornering Behavior of an Articulated Tracked Vehicle. Machines 2021, 9, 38. https://doi.org/10.3390/machines9020038
Tota A, Galvagno E, Velardocchia M. Analytical Study on the Cornering Behavior of an Articulated Tracked Vehicle. Machines. 2021; 9(2):38. https://doi.org/10.3390/machines9020038
Chicago/Turabian StyleTota, Antonio, Enrico Galvagno, and Mauro Velardocchia. 2021. "Analytical Study on the Cornering Behavior of an Articulated Tracked Vehicle" Machines 9, no. 2: 38. https://doi.org/10.3390/machines9020038
APA StyleTota, A., Galvagno, E., & Velardocchia, M. (2021). Analytical Study on the Cornering Behavior of an Articulated Tracked Vehicle. Machines, 9(2), 38. https://doi.org/10.3390/machines9020038