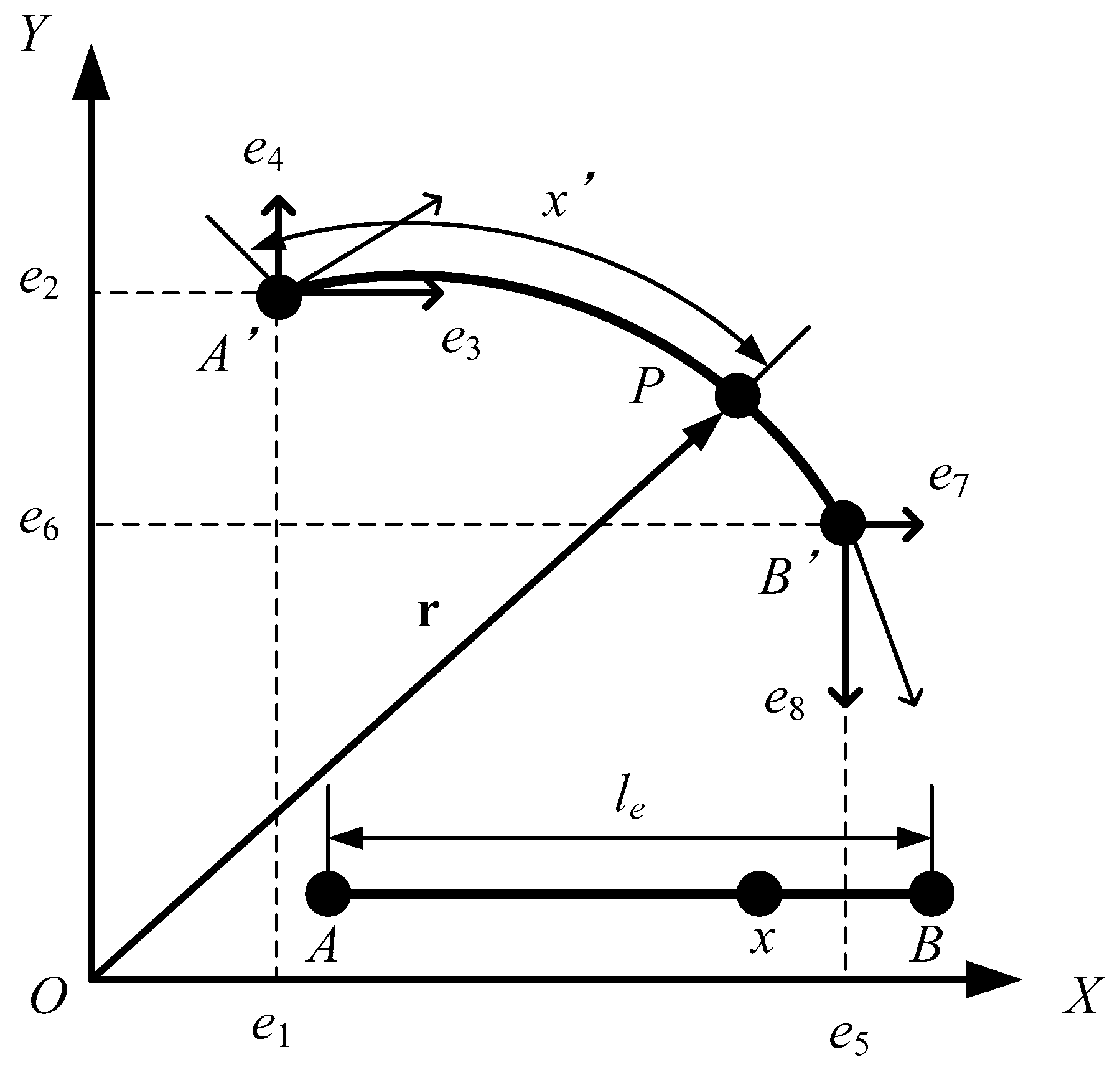
2.2. Flexible Body Formulation
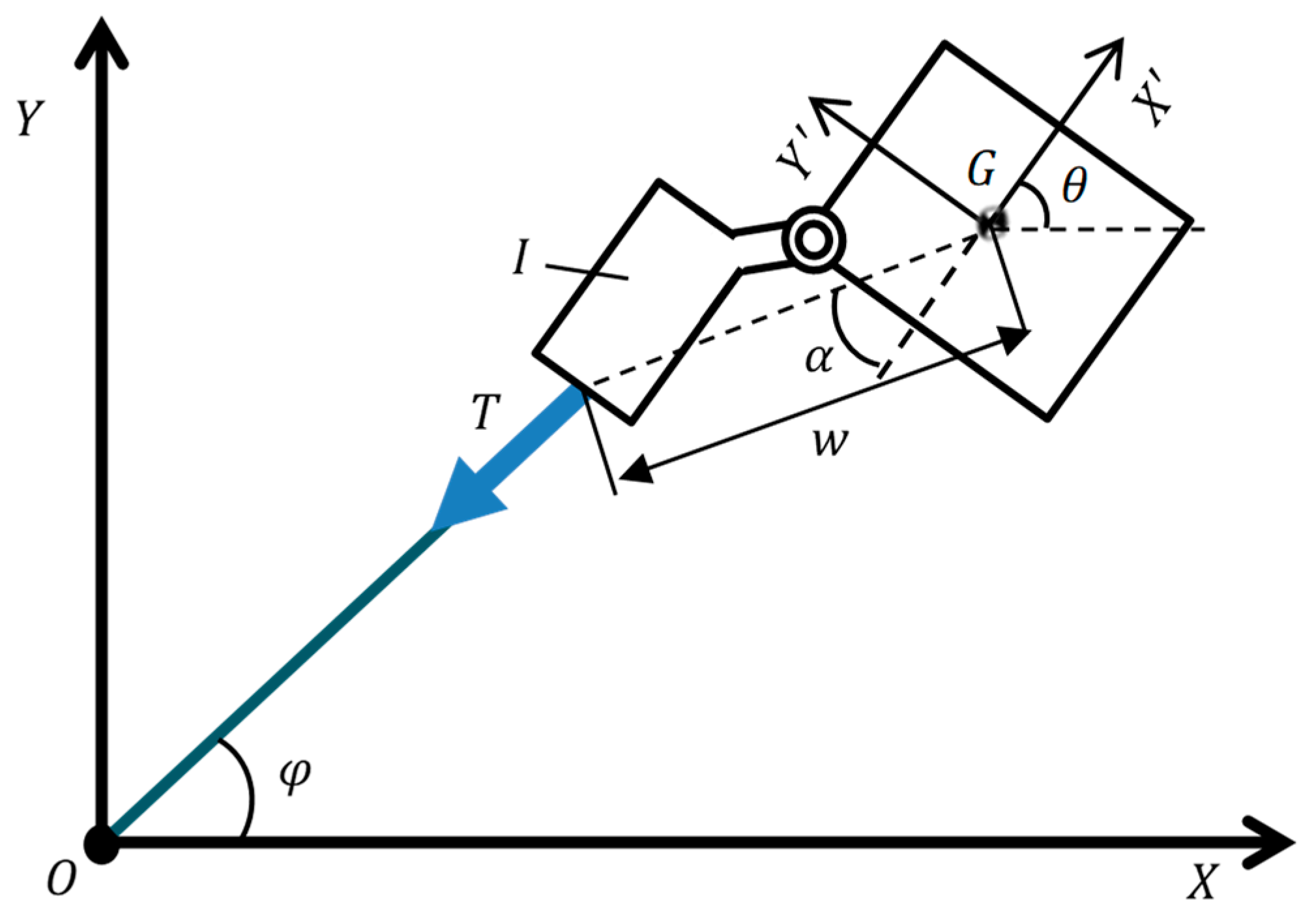
In this model, the motion of the flexible body is formulated using the absolute nodal coordinate formulation (ANCF) proposed by Shabana et al. The beam elements placed in the global coordinate system
-
are shown in
Figure 3. The element before deformation is defined as
, and the element after deformation is defined as
. The position vector
of an arbitrary point
on an element can be expressed as follows using a shape function
and a node coordinate vector
e:
where the node coordinate vector e is composed of flexible body elements:
where (
e1,
e2) and (
e5,
e6) represent the
XY coordinates of the node at the element end. Similarly, (
e3,
e4) and (
e7,
e8) represent the spatial derivative in the
XY coordinate system of the node at each element end. Furthermore, the shape function
is determined based on the assumption of a Bernoulli-Eulerian beam, as follows:
where
is the length of the beam element, and we assume that
is the position of arbitrary point
from element node
before deformation, so that
. The kinetic energy T of this beam element is expressed by the following equation:
where
is the density of the beam element. Then, the mass matrix
of the beam element is given by the following equation:
Next, the elastic force of the beam element is derived. Several methods have been proposed for modeling the elastic force. In this report, we use model T1 proposed by Berzeri et al. [
9]. In addition, we use the bending elastic force and the model S L1 proposed by Wago et al. [
10]. The strain energy
for bending deformation of a beam element is expressed by the following equation:
where
is the elastic modulus in the bending direction,
is the geometrical moment of inertia, and
is the curvature. Assuming that the axial deformation of the beam element is minute, the square of
can be expressed by the following equation:
Substituting Equation (7) into Equation (6), the strain energy for bending deformation is given by the following equation:
The bending elastic force vector
is obtained by partially differentiating
with respect to
and is expressed by the following equation:
where
is a flexural rigidity matrix and is expressed by the following equation:
Finally, the elastic force in the axial direction is derived. The axial strain energy
of the beam element is expressed by the following equation:
where
is the elastic modulus in the axial direction,
is the cross-sectional area, and
is the strain in the axial direction, which can be expressed by the following equation using the Green-Lagrange strain tensor:
When
is partially differentiated with respect to
, the following equation is obtained:
The axial elastic force vector
is obtained by partially differentiating
with respect to e and is expressed by the following equation:
where
is a nonlinear axial stiffness matrix. When
in Equation (14) is replaced with the average axial strain
,
is expressed by the following equation:
The length of the beam element along the neutral axis after deformation is defined as
, which can be expressed by the following equation [
10]:
Define the average axial strain of the beam element as follows using the length change along the neutral axis after deformation
:
Substituting Equation (17) into Equation (15),
is expressed by the following equation:
When the external force term including gravity is
, the motion equation of the beam element finally becomes as follows:
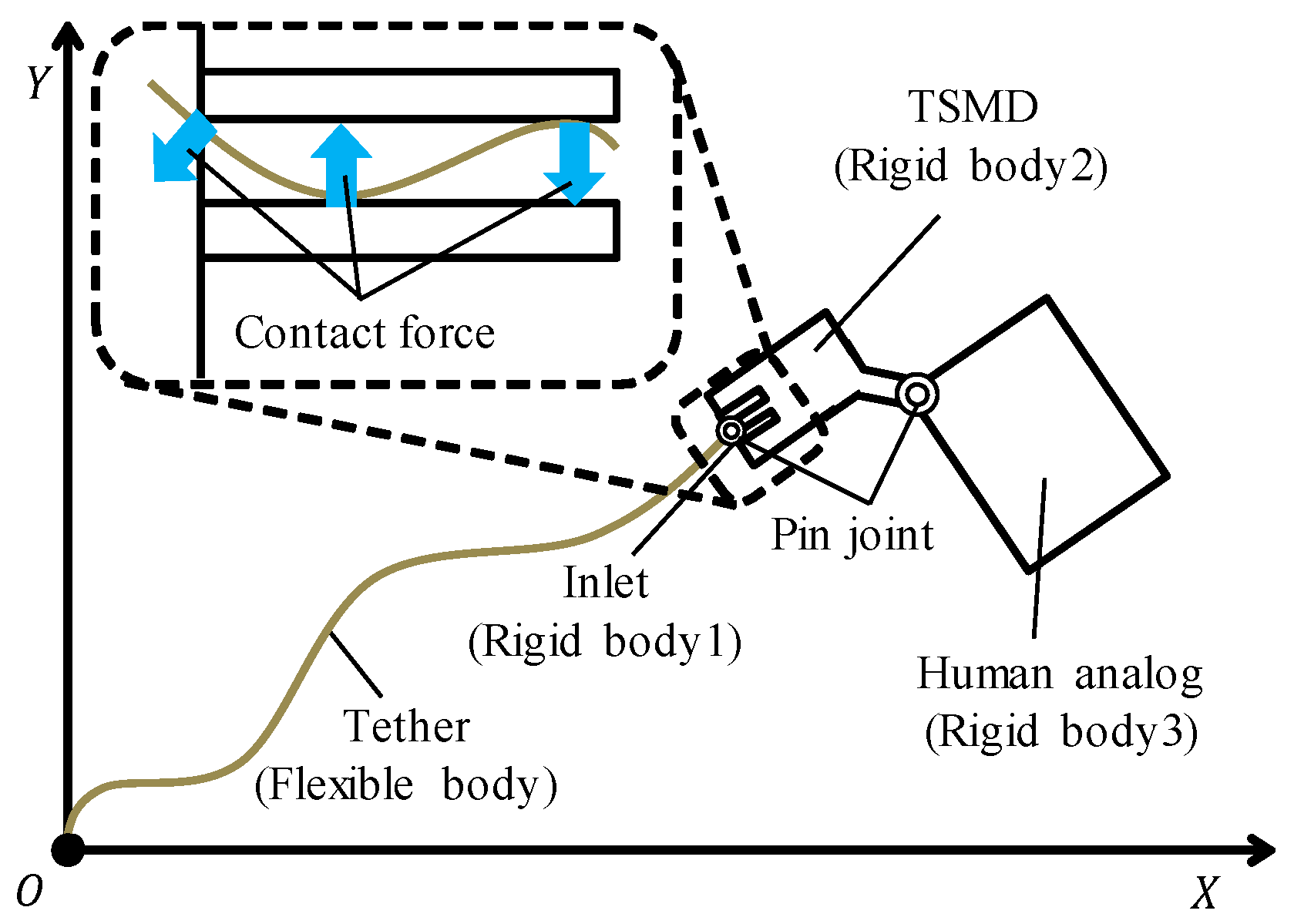
2.3. Rigid Body Formulation
The rigid body formulation is based on an augmented formulation. In this model, the rigid body system is composed of three rigid bodies. The equation of motion for the rigid bodies is:
where
and where
are the masses of the rigid bodies,
are their moments of inertia
,
represent the centers of the rigid bodies,
are their rotation angles
, and
are the external forces and moments of the rigid bodies, respectively. Thus, the equation of motion for the system is:
where
Next, we formulate the system constraints. Pin joints connect rigid bodies 1 and 2, and rigid bodies 2 and 3. Then, the system constraints are given by:
where
is the position vector of the center of rigid body
in absolute coordinates,
is transformation matrix from the local coordinate system to the absolute coordinate system, and
is a position vector up to the joint point of rigid body
in local coordinates. Then, the relative angle between the rigid bodies is determined by the driving constraints and is described as:
where
is the relative angle between rigid bodies 1 and 2, and
is the relative angle between rigid bodies 2 and 3.
In the present paper, we do not consider the relative motion between the rigid bodies, and set the relative angles between rigid bodies as
. Extension and winding of the tether is expressed by displacing the node at the end of the tether at velocity
V in the
X direction in the object coordinate system of rigid body 2. Therefore, if the total length of the tether is
, the node constraint at the end of the tether and rigid body 2 can be described as:
Therefore, the constraint equations for the system
can be written as:
The differential algebraic equations are obtained as:
where
is the Jacobean matrix,
are Lagrange multipliers, and
is the acceleration equation. Differentiating the constraint twice with respect to time, we obtain:
2.4. Rigid Body Formulation
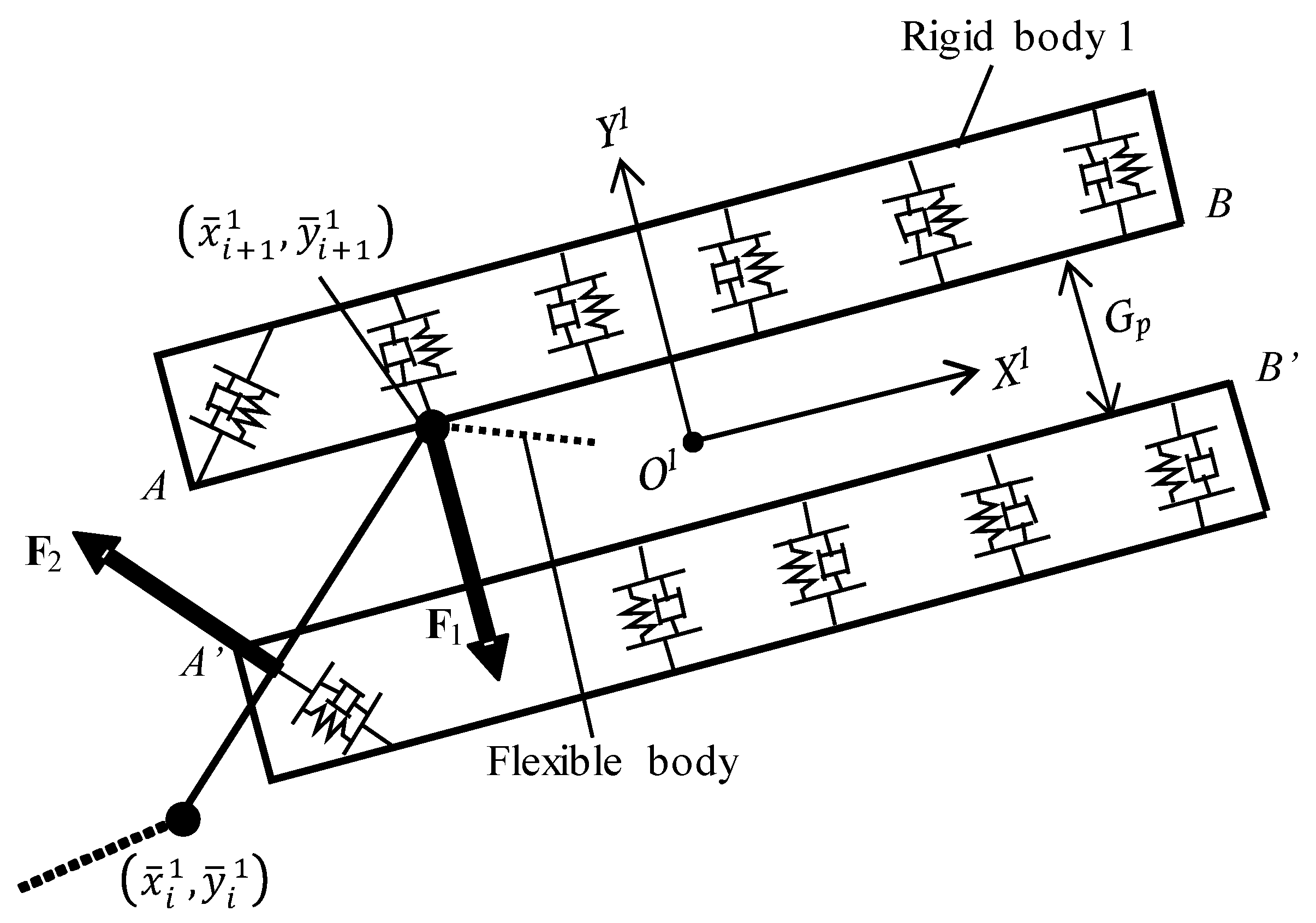
Next, we present the formulation for contact force from the rigid body system on the tether. The contact force between the flexible and rigid bodies is calculated by a spring and a damper element. In addition, we consider the contact force to be divided into and in order to express the suction phenomenon near the suction port. Here, is the reaction force caused by the inner wall of rigid body 1 in a situation in which the node of the beam element is retracted completely, and is the reaction force at the edge of rigid body 1 when the node of the beam element is being retracted. First, the force from the elastic wall inside the rigid body is considered.
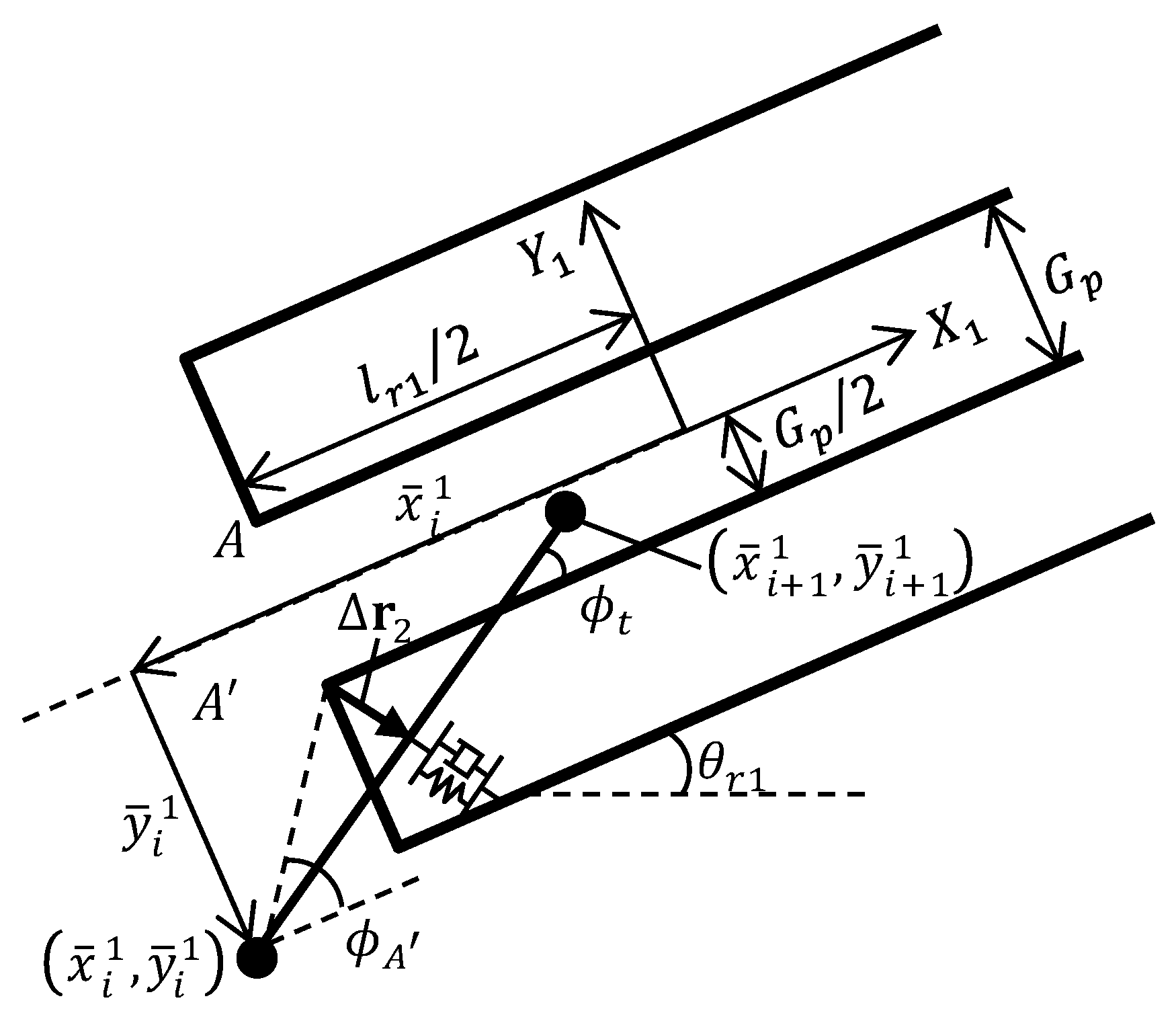
Figure 4 shows the beam element retracted into rigid body 1. The number of the node located outside of and closest to the tip of rigid body 1 is set to
, whereas the number of the node located inside of and closest to the tip of rigid body 1 is set to
. Assuming that the position vector in the global coordinate system for the
th node is
and the position vector in the object coordinate system for rigid body 1 is
, the following equation is obtained:
Therefore, taking into consideration the frictional force acting between the beam element and the rigid body, the force
from the inner wall AB of rigid body 1 on the
th node can be expressed in the overall coordinate system as follows:
where
and
are the spring constant and the damping coefficient for the elastic wall in rigid body 1, while taking contact rigidity into account. The force
and moment
acting on rigid body 1, which are resultant forces of the reaction force of elements in rigid body 1, are described as
where
and
are the
X and
Y direction components when
is expressed in the object coordinate system of rigid body 1.
Next, we consider the reaction force
at the edge of rigid body 1.
Figure 5 shows the flexible body element that is drawn into rigid body 1. For simplicity, it is assumed that the retracted beam element is not geometrically deformed. Assuming that the deformation of the object coordinate system of rigid body1 is
, the contact force
of the edge of rigid body 1 in the object coordinate system can be expressed as follows:
where
and
are the spring constant and the damping coefficient, respectively, for the elastic wall in the vicinity of the tip of rigid body 1, considering the contact rigidity. Assuming that the angle of the beam element in the object coordinate system of rigid body 1 is
and the angle of the line segment formed by the
th node and the suction port tip
is
, the condition that the tip of the beam element and the tip of rigid body 1 contact each other is described as:
Then,
,
, and
are given by:
When the beam element satisfies the boundary conditions in Equation (34), the magnitude of
is:
and when
is decomposed in the
and
directions in the object coordinate system, we obtain:
Next, we consider the frictional force from the edge of rigid body 1 on the beam element. The frictional force in the object coordinate system from the tip of rigid body 1 on the beam element
is described as:
where
is the friction coefficient between the beam element and the tip of rigid body 1. Therefore, the force from the tip of rigid body 1 on the beam element in the global coordinate system is:
Since the force determined by Equation (39) is the force from the beam element, this force is decomposed into components
and
, which are received by the nodes at each end of the beam element. Assuming that
acts uniformly on the beam elements,
and
are expressed by the following equation based on the principle of virtual work:
The force
and the rotational moment
from the beam element on rigid body 1 by contact are described as:
where
and
are the
X and
Y direction components, and
is expressed in the object coordinate system for rigid body 1. For
and
, we herein assume that the deformation of the elastic wall is small, and they are given a large value so that the retracted beam element does not extend outside of rigid body 1. When considering the stability of the analysis,
and
provide critical attenuation for the system formed by the beam elements and
and
. The contact force from rigid body 2 on the beam element can be obtained by replacing the object coordinate system of rigid body 1 with rigid body 2, and then setting
, where it is assumed that the beam element retracted into rigid body 2 is treated as recovered, and no reaction force is applied to rigid body 2.
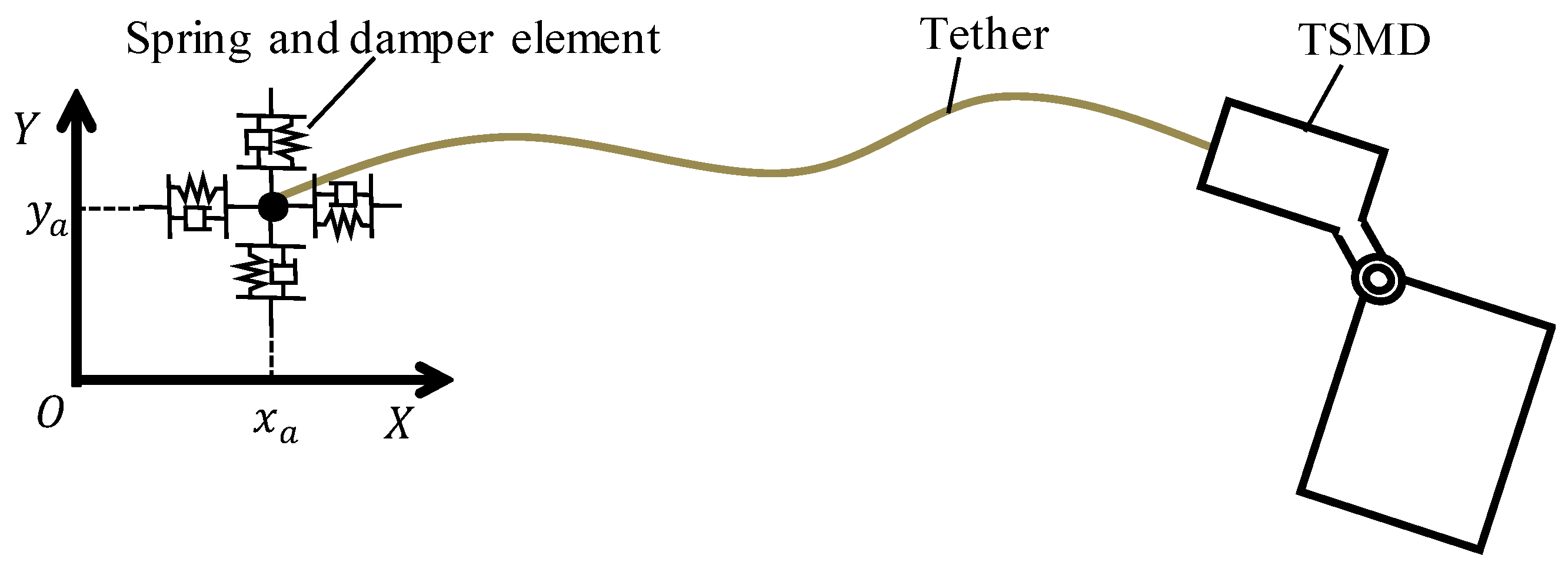
2.5. Extending and Attaching the Tether
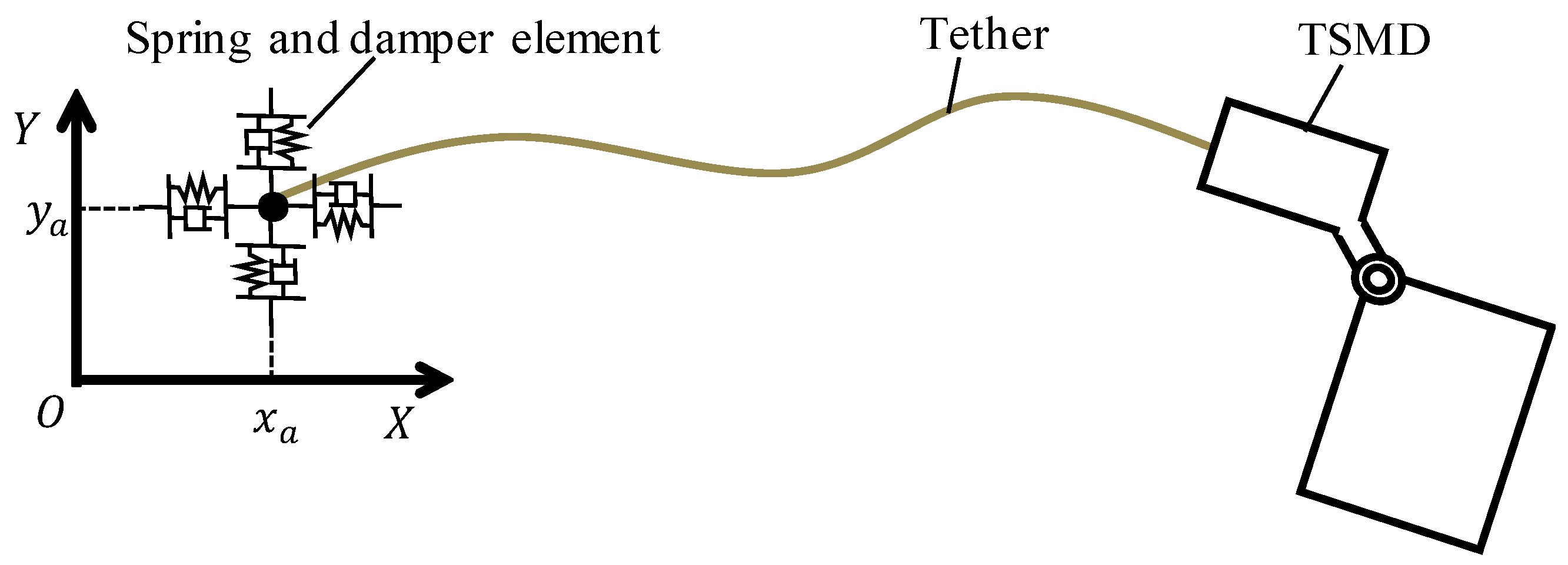
Figure 6 shows the analytical model representing the adsorption of the tether tip. As shown in
Figure 6, a point mass m1 (kg) is attached to the tip of the tether. An initial velocity is given to the point mass by a spring force for injection, and the tether is extended. At this time, the force acting on the point mass is also given to the rigid body as a reaction force. Here, let
be the y coordinate
of the tether tip when the
x coordinate
of the tether tip reaches the suction position
. When the point mass reaches
, as shown in
Figure 6, the point mass is fixed by the spring element and the damper element, thereby simulating the adsorption of the tether tip. Adsorption forces
and
acting on the tether tip are expressed by the following equation:
where
is a spring constant, and
is a damping coefficient. Equation (42) is applied to the external force term 1st, 2nd row on the right-hand side of Equation (28), so that it acts on the element node at the tip of the tether.
In order to prevent deceleration of the tether tip during extension of the tether, a constant deflection amount is generated by setting the constraint condition formula according to the speed of the tether tip. The value of
V in the constraint conditional expression of Equation (26) is set as follows:
where
is the nodal coordinate of the
th element,
is the proportional gain,
is the target deflection in the extending tether, and
is the length of the tether that is not collected in the rigid body.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}