Abstract
The aim of this article is to apply some design methodologies to define, as a first objective, an optimized technical specification and then, as a second objective, to manage the transition from conceptual design to construction project of an innovative means of urban transport, meeting the needs of ‘renewable energy’ requirements, which then decline into this new urban vehicle formed by a hoverboard and an electric scooter. The first part of the article is focused on the conceptual design of the means by using methodologies such as the Quality Function Deployment (QFD), applied in the first phase of the work to compare some of the most popular electric scooters on the market; we then used a typical method for product marketing, i.e., the decision-making process driven by the analysis of benchmarking, suitable for quantitatively organize competitive analysis and choosing innovation targets; finally, we implemented the top-flop analysis in order to better improve the benchmarking implementation, identifying the best product on the market, basing on the highest number of innovative requirements owned by it, as shown by Frizziero in 2018 and Meuli et al. in 1997. The second part of the article focuses on the project of the kick scooter through the use of a software for the FEA simulation and on the possible realization of the prototype through a suitable connecting component.
Keywords:
QFD; benchmarking; innovation; transport; vehicle; product design; conceptual design; top-flop analysis 1. Introduction
1.1. The Paper
The article has two distinct parts. The first part of the article is focused on the conceptual design of the means of transportation by using methodologies such as the Quality Function Deployment (QFD), applied in the first phase of the work, to compare some of the most popular electric scooters in the market. We then used a typical method for product marketing, i.e., the decision-making process driven by benchmarking analysis, suitable for quantitatively organizing competitive analysis and choosing innovation targets. Finally, we implemented the top-flop analysis in order to improve benchmarking implementation, identifying the best product on the market, based on the highest number of innovative requirements owned by it. The second part of the article focuses on a kick scooter project using a software for FEA simulation and the possible realization of the prototype through a suitable connecting component.
First, we analyzed the world of urban electric vehicles focusing on electric scooters. We compared the main models to understand which aspects should be improved to offer a sufficient degree of innovation in this field. To do this, we exploited the Quality Function Deployment for the market analysis and the benchmarking approach for the concurrent analysis described by Frizziero in 2018 [1], Meuli in 1997 [2] and Akao in 1990 [3]. Frizziero in 2018 explained how applying QFD and benchmarking methods to the conceptual design of an urban means works. In his work is depicted the approach to a specific case study about hoverboard, in which market requirements were exploited by Quality Function Deployment. In order to improve the implementation of benchmarking, we exploited the top-flop analysis; this enabled us to identify the best product in the market, based on the number of innovative requisites owned by it.
In the second part of the article, we carried out an electric scooter project using CAD software and then exploiting a FEA simulation software, as performed by Bathe K.J. in 2014 [4]. Bathe in 2014 explained how to use Finite Elements Analysis Methodology in order to evaluate the mechanical characteristics of a new designed structure. We focused on the possible realization of the prototype illustrated in the article by studying a suitable connection component, which connects the designed scooter to a generic hoverboard.
1.2. Background
The study was motivated by a social need described by Frizziero. In 2018, Frizziero illustrated what means of urban transport will be required by users in the near future; following a survey carried out in a large sample of people living in the city of Bologna, it emerged that the preferred means for the mobility of the future are, in order, respectively, the hoverboard and the push scooter.
In subsequent works, just as the one of Frizziero, L., Donnici, G., Francia, D., Liverani, A., Caligiana, G., Cantarelli S., in 2018 [5] and in the Graduation Degree Thesis, by Gaddoni, “Studio di design di un mezzo di trasporto urbano innovativo”, 2017 [6], following an innovative study by Frizziero, an innovative hoverboard was developed with product characteristics at the forefront of the reference market.
However, following a SWOT analysis, some limitations of the designed means of transport have emerged: in particular, the use of the hoverboard by not only young people, who would have suggested a more stable means of transport, perhaps integrating the hoverboard architecture with that of the push scooter, as the latter was also voted, as shown by Frizziero in 2018) [1], as the second favorite urban vehicle.
This work is illustrated in this paper and its objective is to propose a solution that would meet the requests for improvement of the abovementioned project, 2018.
Our way of life is closely related, among other things, to the mode of travel that we use to accomplish our activities (work, leisure, study, etc.). We think it is alright to use a car, even when there is no real need. A car has positive connotations (especially autonomy); however, on urban trips, this is often overridden by other important and negative issues faced personally by the driver (lost time waiting in traffic, difficulty in finding parking spaces and the costs involved, etc.).
However, there are negative effects of citizens not having access to or being able to use a car. They struggle with traffic problems, even if they are not using a car. These people suffer from the so-called “external costs”, i.e., the negative effects generated by those who use the road transport system.
Traffic is an integral part of urban life; it affects our habits, takes time away from social relationships and emotions, causes stress, and is harmful to health. Several people die in road accidents (including many pedestrians) daily and many more are injured. The social cost of road accidents is around €24 billion. The pollution from cars claims thousands of victims every year. In almost all big cities, the PM10 limits imposed by the Directive on Air Quality are not met.
In addition to the social and environmental damage, we must also remember the economic costs of the ownership and maintenance of private vehicles. On an average, each household spends about €5000 per year on a car in Europe. In addition, the economic value of time lost in traffic is estimated in the order of billions of euro at the national level.
The alternatives to cars are often unattractive. Public transport and bicycle mobility do not always get the attention they deserve by administrators, not only because of lack of resources but, very often also because of lack of appropriate specialist skills. In the absence of valid alternatives, the car remains the preferred means of transportation of many Europeans, despite many, in equal travel times, willing to use public transport. However, today, the share of journeys by public transport is lower than would be desirable, mainly because of poor ride comfort, odd and infrequent connections. A bike could be a real means of transport in the city for short distances (about half of all car trips in fact is less than 5 km), but it fails to establish itself mainly because of the lack of safety conditions on the road, with the exception of countries like The Netherlands and Denmark, as described by Dimitri in 2010 [7].
Everything described above helps us understand the need to develop an innovative means of transport, which overcomes the problems associated with traffic, pollution, lack of comfort, and the inability to shorten transport times. An understanding is thus required of the means of transport that will be ideal for future mobility.
Thus, this present work seeks to develop a decision-making process, based on QFD, benchmarking and 6σ, in order to identify guidelines to design an ideal means of city transportation.
The term “sustainable mobility” indicates the type of movement (as well as, generally speaking, an urban mobility system) capable of reducing the environmental, social, and economic impacts of private vehicles, namely:
- Air pollution and greenhouse gas emissions
- Noise pollution
- Road congestion
- Accident rate
- Deterioration of urban areas (caused by the space occupied by cars to the detriment of pedestrians)
- Land consumption (caused by the construction of roads and infrastructures)
The most frequent sustainable mobility interventions are:
- -
- Public transport: Public transport is a form of organized and mass transport with lower environmental impact than private means of transport. It is the first form of intervention on sustainable mobility for urban or local transport that consists of buses, subways, trolleybuses and trams, as well as national/international transport.
- -
- Preferential lanes: Preferential lanes are high-speed roads exclusively used by public transport or emergency vehicles. They help avoid traffic congestion and offer a further advantage to those using public transport instead of private vehicles.
- -
- Cycle paths: cycle paths are lanes exclusively dedicated to bicycles. If the territory is flat or with low gradients, bicycle lanes encourage people to use bikes for short urban journeys, instead of cars or scooters. They evidently imply an environmental advantage.
Small electric mobility is to be added. It consists of small means that transport a person. Kick scooters, solowheels, segways, skateboards, hoverboards, which are light and easily transportable, rechargeable at home or in the office, are becoming more and more used for short urban movements. Small-scale electric mobility is a constantly evolving sector. An increase in their use could lead to decongestion of traffic, thus reducing pollution.
Sustainable mobility is a very sensitive topic in Italy, as shown by a survey developed by Lorien Consulting (https://www.legambiente.it/contenuti/comunicati/la-mobilita-in-italia-sta-cambiando-sondaggio-lorien-consulting):
Sixty-four percent of those who have been interviewed used public transport, 32% of them used bicycles, 19% often used a rental car or taxi, 10% used shared means. This allowed us to make distinctions based on real mobility models. Thirty-one percent of those who have been interviewed can be classified as moderates, who choose only public transport and move in medium intensity. Thirty-two percent are multi-mobile, who move a lot and use different vehicles, preferring electric ones.
Then there is 21% of those who were interviewed who can be classified as permanent, making short trips and always using the same means. Finally, there are the mono-mobile, who represent 17% of the sample and always use the same vehicle to move, as shown by Lorien Consulting in 2017 [8].
1.3. Small Urban Vehicles
A kick scooter is a two-wheeled vehicle, whose movement is determined by human thrust through a man’s lower limbs. It consists of a footboard, on which one places his feet; a handlebar, pivoted on a platform, which is used to change direction; and a brake, usually placed at the back to block the rear wheel and therefore the vehicle, or handlebars as on a standard bicycle. The first kick scooters, not to be confused with the first and rudimentary attempts to make a bicycle, date back to the early 1900s, when some “scooters” (that’s how Americans named the kick scooter) were designed and patented in the United States of America, whose principles have been taken up on some models produced even nowadays. Initially they were designed as a game for children, but on the wave of enthusiasm brought about by the industrial development, they were also proposed, with not much success, as a means of transport. Two different products immediately emerged: pure kick scooters and mechanical kick scooters. The mechanical kick scooter has evolved in the electric scooter available today. Unlike the traditional kick scooter, the electric one is equipped with an electric motor powered by a battery. The presence of the motor allows the kick scooter to move without the driver applying any type of thrust with his feet.
The Figure 1 shows a kick scooter.

Figure 1.
Kick scooter.
The hoverboard is a personal two-wheeled transport device, whose movement is determined by the thrust that the electric motors contained in the wheels imprint on the wheels. It consists of two frames of metal material covered with two hulls made of plastic.
In the upper part, there is the footboard, and the two halves are connected by a joint that allows them to tilt independently from one another. The hoverboard movement is controlled only by the feet: one leans forward to go forward, pushing down the tip of his toes, while one bends slightly in the same direction to move backwards, pushing on his heels. The commands given by one’s feet are recorded by a series of sensors placed on the vehicle that send the data collected to the gyroscope and to the motherboard, both placed in the motherboard [5]. The Figure 2 shows a hoverboard.

Figure 2.
Hoverboard.
1.4. Objective
Until a few years ago, vehicles such as kick scooters and hoverboards were considered toys, whilst now the phenomenon of a new electric mobility has expanded, reaching significant numbers: 40,000 pieces a year are estimated to be used, with a fast growth curve. This article will address the design of a vehicle that is a “hybrid” between a kick scooter and an hoverboard [1,3].
This project has two main objectives. One—designing something innovative, which is not yet on the market and could raise the bar of technology and innovation in the field of sustainable transport. Two—trying to create a means of transport that is:
- -
- Used by as many people as possible
- -
- Exploited in more situations compared to the simple kick scooter or the simple hoverboard
- -
- Compact and easily transportable
- -
- A good alternative to bikes and public transport
- -
- A means of sustainable mobility
The vehicle to be designed can be used in two ways:
- Kick scooter mode: when the hoverboard part and the kick scooter part are connected, the vehicle can be used as a kick scooter.
- Hoverboard mode: when the two parts are disconnected, the hoverboard part can be individually used.
2. Design Methods and Tools
For the conceptual design of the means, we considered the QFD method depicted by Akao in 1990 [3], Hubka & Eder in 1992 [9], Fargnoli et al. in 2005 [10] and Freddi in 2005 [11] (quality function deployment), which is a methodology conceived in Japan, based on the definition of customer needs that may be implicit or explicitly stated. The customer’s voice can be acquired through discussions, surveys, and market studies developed by Pahl & Beitz in 1977 [12], Ulrich et al. in 2008 [13] and Lam & Lai in 2015 [14].
Generally, as explained by Fargnoli, Sakao and Notarnicola, 2005 [10], QFD methodology is composed by four main phases: clarifying the problem (task analysis); conceptual design (function analysis and organ structure definition); embodiment design (preliminary and dimensional layout definition, production characteristics’ analysis); and test (constructive layout verification and validation).
In the present paper, the first phase of the QFD method was applied as follows:
- 1.
- Analysis of the environment
- 2.
- Task evaluation
- 3.
- Six questions
- 4.
- Lists of quality requirements
- 5.
- Analysis with evaluation matrixes (interrelation matrixes)
- 6.
- Requirements from relative importance matrix
- 7.
- Requirements from relative independence matrix
- 8.
- What/how matrix
To increase the effectiveness of the QFD method, it was augmented by means of the top-flop analysis performed by Frizziero in 2018 [1]. Hence, the proposed methodology can be outlined as illustrated in Figure 3.
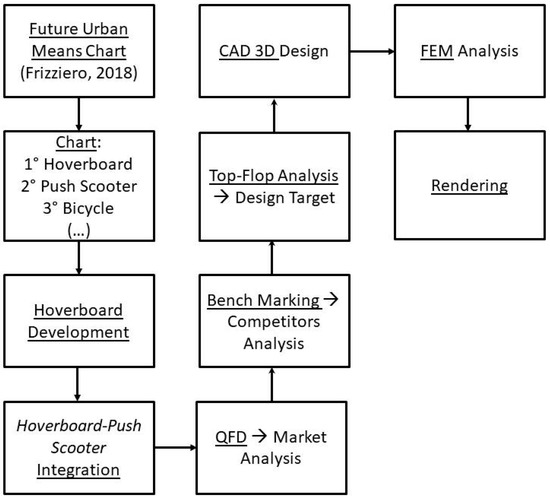
Figure 3.
Flow Chart of the Project.
The basic elements of the QFD approach are:
- -
- The customer is the first priority of the company, so one needs to understand exactly what he wants
- -
- The company must be proactive in guiding and suggesting to the client how to satisfy his needs
- -
- The involvement of all staff ensures the internalization and assumption of responsibilities towards the customer
- -
- A correct methodology helps working together and pursuing common goals.
The objectives that the QFD method achieves are illusteed by Pahl & G., Beitz in 1977 [12]:
- Transferring and turning the requests of the external customer into the requests of the internal customers of the company
- Improving communication between the different business areas
- Setting priorities in product improvement
For the kick scooter project, we exploited the Finite Element Analysis (FEA), which is a computer simulation technique used in engineering analysis. This simulation technique exploits the finite element method (FEM). The development of finite element methodologies began with the advent of the computer. The finite element procedures are today an important and indispensable part of the engineering analysis, as shown by Hubka & Eder in 1992 [9]. The calculation software with finite elements in recent years are widely used in all fields of engineering for the analysis of structures, solids, and fluids and it can be assumed that their use will increase over the next few years. Hubka in 1992 says that it is important to distinguish between industrial design procedure and design engineering methodology. In this paper, we adopted the Hubka design engineering approach.
In detail, in this work, an environmental QFD approach depicted by Fargnoli and Sakao in 2005 [10] was followed and implemented in the methodology depicted in Figure 1.
One of the most important aspects of finite element methods is their reliability. In fact, these processes can be safely exploited through a computer-design. The essence of the finite element method applied to an engineering problem consists of a set of algebraic equations that must be resolved, and this can be done and turned into something generally applicable in engineering analysis, only through the use of a computer. The finite element method is used to solve problems of a physical nature in the fields of engineering analysis and design; the physical problem typically involves a real component or structure, which is subject to defined loads, as demonstrated by Bathe in 2014 [4], Brauer in 1988 [15] and Cesari in 2002) [16].
The main feature of the finite element method is discretization through the creation of a grid (mesh) composed of primitives (finite elements) of an encoded form (triangles and quadrilaterals for 2D domains, tetrahedra and hexahedrons for 3D domains). The advantages of a finite element analysis are the possibility of dealing with problems in this field:
- -
- Defined on complex geometries, and this represents the heart and power of FEM methods
- -
- Related to a wide variety of engineering problems
- -
- With complex constraint conditions
- -
- With complex loading conditions.
The disadvantages of the analysis consist of:
- -
- The impossibility of generating a solution in a closed and parameterizable form of the problem
- -
- In the approximations of the solution related to the finite element approach used.
3. Case Study
We implemented the above methods described in the case study below. At first we adopted the QFD method in order to identify a concurrent analysis on the electric kick scooters and in order to understand what degree of innovation can be applied to the product to be designed. Applying the six questions and the evaluation matrixes to the case of the small green urban vehicles, the authors developing the present paper were able to give the following answers, in order to find out the design targets to be reached through interrelation matrix as already explained by Renzi and Leali in 2016 [17].
Six questions analysis produced the following results:
- (1) Who: who uses the Innovative City Transportation Means (ICTM)? who produced the ICTM? The ICTM is used by people going to their jobs; moving about in the city centre and in traffic; avoiding several barriers; going to the shops.Requirements obtained after discussion: use immediacy, agility, mobility, dexterity, access to the restricted traffic zone (A-ZTL), flexibility of use, accessibility to close spaces (ACS), accessibility to pedestrian spaces (APS).
- (2) What: what is the use of the ICTM? The ICTM needs to transport people; is faster than on foot; to move about the city centre; to move about in strict spaces; to be used for leisure; to reach workplaces.Requirements (after discussion): capacity of transportation for drivers and other people, superior speed than pedestrians, dynamicity, flexibility, fun, availability.
- (3) Where: where is the ICTM used? It is used in the city centre, close spaces, traffic, pedestrian areas.Requirements (after discussion): agility, mobility, access to the restricted traffic zone (A-ZTL), flexibility of use, accessibility to close spaces (ACS), accessibility to pedestrian spaces (APS).
- (4) When: when is the ICTM used? It is used in the morning to reach workplaces; during the weekend for leisure; for shopping; as an alternative to walking.Requirements (after discussion): reliability, accessibility (A-ZTL, ACS, APS), flexibility of use, speed.
- (5) Why: why is the ICTM used? It is faster than walking; enables people to go farther than they would on foot; makes life easy; helps people reach destinations on time; have a good time; to not pollute the environment.Requirements (after discussion): comfort, speed, use immediacy, fun, ecology, duration of use, autonomy, dynamicity.
- (6) How: how is the ICTM used? It can be used as a transport means; as a service device; in a secure way (it can hardly be stolen, being transportable); in a flexible way (it can be used to access close spaces, for example, supermarkets); can be transported and moved.Requirements (after discussion): functionality, flexibility, self-transportability, not stealability.
The above analysis explains the 22 important characteristics which ICTM must own:
1. Use immediacy; 2. agility, mobility; 3. dexterity; 4. access to the restricted traffic zone (A-ZTL); 5. accessibility to close (ACS) and to pedestrian spaces (APS); 6. reliability; 7. flexibility; 8. speed in traffic; 9. speed; 10. duration of use, autonomy; 11. functionality; 12. cannot be stolen; 13. self-transportability; 14. capacity of transportation for driver; 15. capacity of transportation for other people; 16. faster than pedestrians; 17. dynamicity; 18. fun; 19. availability; 20. comfort; 21. ecology; 22. price/cost.
As mentioned before, in the present work, an interrelation matrix is used for evaluating the best city transportation means, based on green and renewable energy, differently from the traditional uses that realizes the application in order to estimate relative importance or independence relationships among requirements. Moreover, in the present application, the values assigned to each kind of transportation means to be evaluated are given in the scheme below (differently from traditional applications, where relative importance is evaluated with 0, 1, 2 and interdependence with 0, 1, 3, 9) as shown by Freddi in 2005 [11]:
| Value | Opinion |
|---|---|
| 0 | Poor |
| 2 | Inadequate |
| 4 | Insufficient |
| 6 | Sufficient |
| 8 | Optimum |
| 10 | Excellent |
The analysis matrix is shown below (Table 1); it is employed in a new way with respect to the classic interrelation matrixes traditionally used, as stated before. In an interrelation matrix, the 22 requirements obtained were linked to nine possible kinds of urban transport means: (1) foot, (2) car, (3) motorbike, (4) scooter, (5) bicycle, (6) push scooter, (7) hoverboard, (8) bus and (9) taxi. This was revealed by a survey conducted on a sample of citizens from medium cities.

Table 1.
Analysis of the best innovative renewable energy.
The table above is also explained in the following graphic representation (Figure 4):
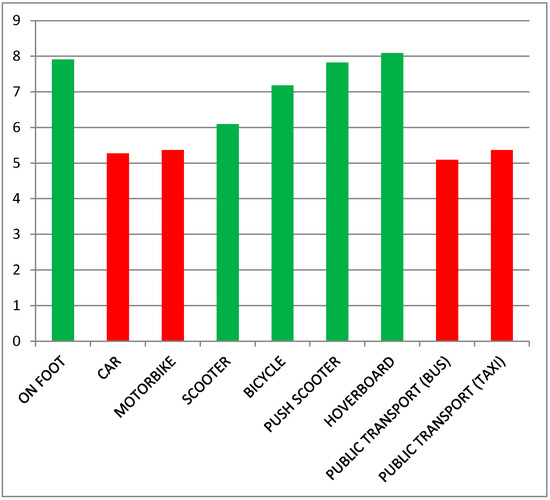
Figure 4.
Histogram of analysis of the best innovative renewable energy.
From the analysis above, it can be remarked that, of the nine kinds of city transportation means considered (foot, car, motorbike, scooter, bicycle, push scooter, hoverboard, bus and taxi), an evaluation conducted among students of University of Bologna takes us to the following considerations:
- (1)
- Four means are not enough for transportation in the city. Car, motorbike, bus and taxi didn’t get sufficient vote to be considered as a competitive means: in particular, car →5,3; motorbike → 5,4; bus → 5,1; taxi → 5,4. Parameters linked to mobility, immediate use, flexibility, price, and alike were taken into consideration to arrive at these results.
- (2)
- Five means are suitable for transportation in the city, but only four (excluding scooter, voted 6,1) can be considered very good (vote over 7): foot, bicycle, push scooter and hoverboard. Only hoverboard is excellent (over 8).
Thus, we can conclude that through advanced QFD analysis, hoverboard was identified as the best kind of city transportation means. For this reason, our work will continue analysing the hoverboards produced by the main competitors, in order to intercept the targets for innovation in this field as shown by Sadok Cherif, Aouni and Chabchoub in 2010 [18].
Then, applying benchmarking methodology, the authors could implement concurrent analysis in the following way: 10 different models of different brands were taken into consideration, giving an idea of the vast panorama of stylistic, structural, functional and technological solutions that is found in the market of electric kick scooters. These 10 selected models cover a range of prices from about €180 to €600. The results of the research are shown in Table 2, in which the technical parameters were defined from the technical and marketing brochures of each product, which included quantitative performances.
Table 2.
Bench Marking Analysis.
From the benchmark made, we can notice that to bring a sufficient degree of innovation to electric kick scooters, one must have a Δ > 5, where Δ defines the difference between the top features and the flop characteristics of each model taken into consideration in this comparison.
For the documentation of the environment in which the product that is being developed must be placed, we must answer these questions as depicted by Hauser et al. in 1988 [19], Chan & Wu in 1998 [20], Wu et al. in 2005 [21], Wu in 2006 [22] and Shieh & Wu in 2010) [23]:
- -
- Who (who uses the product)
- -
- What (what the product should have)
- -
- Where (where the product is used)
- -
- When (when the product is used)
- -
- Why (why the product is used)
- -
- How (how the product is used)
In the case of an electric kick scooter, the result of this survey is shown in Table 3:
Table 3.
Six-Question Analysis.
To attribute the characteristics that the kick scooter must have in this project, we decided to carry out a small survey using a sample of 30 inhabitants of the city of Bologna, out of which:
- -
- 10 usually travel by bus
- -
- 10 usually move on foot
- -
- 10 usually move by bicycle
- -
- 15 were women
- -
- 15 were men
- -
- 15 were students, including 10 undergraduate and 5 high school students
- -
- 15 were workers
These people have been asked the following questions as described by Cristiano et al. in 2001 [24]:
- 1.
- Is it important for the kick scooter to reach a high speed? (>38 km/h from the benchmark)
- 2.
- Is it important for the kick scooter to have a high level of autonomy?
- 3.
- Is it important for the kick scooter to be rechargeable in a short time?
- 4.
- Is it important for the kick scooter to have a seat?
- 5.
- Is it important for the kick scooter to have an information display and position lights?
- 6.
- Is it important that the kick scooter is light?
- 7.
- Is it important that the kick scooter is foldable?
- 8.
- How much are you willing to spend on this item? (< €400, which is the average price of the kick scooters taken into account for the benchmark).
The result of the survey is shown in Table 4:
Table 4.
Survey Results.
The results of the survey (although this has been carried out, for lack of time, on a small number of people) show that in order for a large number of people to appreciate the kick scooter, the following characteristics must be taken into account:
- 1.
- High autonomy
- 2.
- Quick charge
- 3.
- Lights and displays
- 4.
- Small size
- 5.
- Reduced weight
- 6.
- Price lower than €400
- 7.
- Appealing design
- 8.
- Lack of noise
The user’s request is basic entry data of the QFD process and thus the basis for the next matrix, which is an interrelation matrix used to identify the most independent characteristics (first use of interrelation matrix). Understanding exactly what customers expect is the most crucial step in defining and delivering a good service, as illustrated by Zeithaml et al. in 1996 [25].
With these characteristics, the interrelation matrix is constructed, which highlights which of these is the most influential characteristic and which among these is the most influenced by the others, as shown by Gherardini, Renzi & Leali in 2017 [26].
The matrix (Table 5) relates the eight characteristics to the others. These are reported once horizontally as causes and vertically as effects, with each pair of characteristics associated with a value of 1, 3 and 9 following these criteria:
Table 5.
First Use of Interrelation Matrix: Independence Chart.
- 1: When the element of the row is not so much affected by the column element
- 3: When the element of the row is moderately influenced by the column element
- 9: When the element of the row is severely influenced by the column element
There is no value if the row element is not affected by the column element. This matrix indicates that the reduced weight characteristic is the most independent among the others, while the most dependent feature is the cost.
Shifting towards the construction of the relative importance matrix (second use of the QFD interrelation matrixes) that highlights the most important features that the kick scooter must have, once again the characteristics are inserted both horizontally and vertically and a value of 0, 1 and 2 is associated with each pair of characteristics, according to these criteria:
- 0: Most important row of the column
- 1: Equally important line to the column
- 2: Less important row of the column
The second matrix is shown in Table 6.
Table 6.
Second Use of Interrelation Matrix: Relative Important Chart.
It is clear that high autonomy, low weight, and small size are the most important characteristics.
The last step consists of building the relationship matrix where the needs are compared (WHAT) with the parameters that must satisfy them (HOW). The WHAT are placed on the lines while the HOW on the columns as asked by Akao in 1990 [3]. A numerical value between 1, 3 and 9 is assigned to each pair of WHAT/HOW, according to these criteria:
- 1: Weak link
- 3: Average link
- 9: Strong link
Empty box: no link.
The relationship matrix is shown in Table 7.
Table 7.
Relationship Matrix.
The most influential design parameter in this case is correct sizing of the parts the kick scooter is composed of [5]. After the QFD analysis, comparing the results obtained through this analysis with the data emerging from the benchmarking activity, it is clear that the project objective is to realize an electric kick scooter that can compete in the market, innovating and improving some of the features of the kick scooters that are already on sale, as said by Turner et al. in 1956 [27] and Hrennikoff in 1941 [28].
The project data are:
- -
- Maximum speed of 25 km/h (7 m/s) as the average speed of the other “urban” electric scooters
- -
- Autonomy > 30 Km
- -
- Maximum weight supported of 130 kg
- -
- Quick charge
- -
- Object weight ≤ 10 kg
- -
- Small size
- -
- 8-inch wheels (d = 200 mm).
As for the kick scooter, it would be necessary to carry out a preliminary benchmarking operation for the hoverboard part of the “hybrid” vehicle that is to be realized as well; however, it was decided to consider a hoverboard already on the market, read Strang et al. of 1973 [29] and Clough of 1960 [30].
Given that the “hybrid” vehicle to be built consists of a hoverboard and an electric kick scooter, and given that this is a vehicle designed for city use, it might have to be carried by hand, and must thus be light. With regard to parts of the kick scooter, the main problem that limited solutions for a platform separated from the frame was excess weight. Thus, after several simulations using different types of frames, we chose a solution that integrates the footboard in the scooter frame. This frame consists of aluminum tubes with a diameter of 47 mm to which a 580 × 192 × 7.5 aluminum plate was welded (length-width-thickness); the total mass of the component is 4.2 kg instead of over 7.5 kg that characterized the previous solutions. FEA simulation (Figure 5a,b) was carried out on the new component as well, in order to verify its capacity to support a load of 1300 N (considering a passenger that weighs 130 kg).
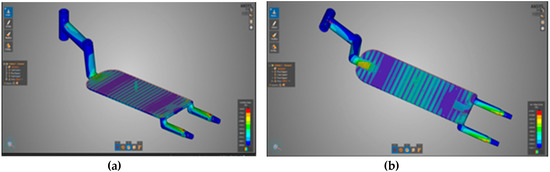
Figure 5.
FEA Analysis Results. (a) upper part, (b) lower part.
The two images show that the maximum equivalent stress according to Von Mises is 41.8 MPa and is recorded in the same areas of the previous solution. These two images are a result of the simulation and show the frame as divided into various areas, each of them colored differently. Each of these nine colors is associated with a number that indicates the equivalent stress of Von Mises in the respective area. Colder colors are characterized by low equivalent stress values, while warmer colors indicate a higher equivalent stress value.
Safety coefficient can be calculated as:
SC = 32441.8 = 7.75 → the new component is abundantly verified
The material we decided to use for the scooter’s frame is Al 5086 alloy, which is an aluminium-magnesium alloy.
The mechanical properties of the chosen alloy are:
- Yield limit Rp0,2: (265–324) Mpa
- Tensile strength Rm: (304–362) Mpa
- Elongation E: (5–13)%
- Hardness (HB): (90–105) HB
Since this alloy is sold in bars treated by different hardening levels, the hardened H32 grades were chosen. The mechanical characteristics of the used alloy are:
- Yield limit Rp0,2: 295 Mpa
- Tensile strength Rm: 310 Mpa
- Elongation E: 14%
- Hardness (HB): 85 HB
Our design of the kick scooter is shown in the following figure (Figure 6):

Figure 6.
Kick Scooter Result.
In Table 8, the scooter that we designed is compared with competitors in the market:
Table 8.
New Benchmarking Analysis.
We managed to get 11 positive parameters and three negative parameters; the resulting Δ is 8, which is greater than the best delta obtained by three competitors.
The designed kick scooter offers some parameters of innovation compared to competitor models, such as its ability to close its knobs, taking up a smaller space when closed. The total mass of the kick scooter, taking also into account its motor, is 10 kg, which is not lower than 7.9 kg but is still one of the lightest models considered in the benchmarking phase. Also, given that to assemble the part of the kick scooter in the “hybrid” vehicle that is being designed the kick scooter motor will not be necessary because the vehicle will move thanks to the hoverboard motors, the total mass of the scooter part is 7.02 kg.
The connection between the kick scooter part and the hoverboard in the “hybrid” vehicle we wanted to design must therefore be:
- -
- Mechanical: when the two parts are connected, they must be built-in and therefore represent a single vehicle in the running phase. When the kick scooter part is disconnected from the hoverboard, the latter can be used as a common hoverboard.
- -
- Electric: when the two parts are connected, an electrical connection must be established between them so that, during the running phase, the kick scooter battery, along with that of the hoverboard, transfers energy to the hoverboard motors. When the two parts are disconnected, the electrical connection is obviously interrupted.
The connection as a whole is entrusted to two components that will deal distinctly with the mechanical connection and the electrical connection, namely:
Figure 7.
Watertight connector.

Figure 8.
Watertight connector.
This is a watertight connector with IP68 sealing class. The IP68 class indicates that this connector can be exposed to water, dust and weathering, so even if the vehicle were to be used in the rain, there would be no issue affecting the electrical connection and the passenger’s safety would be ensured at all times.

Figure 9.
Link ring.
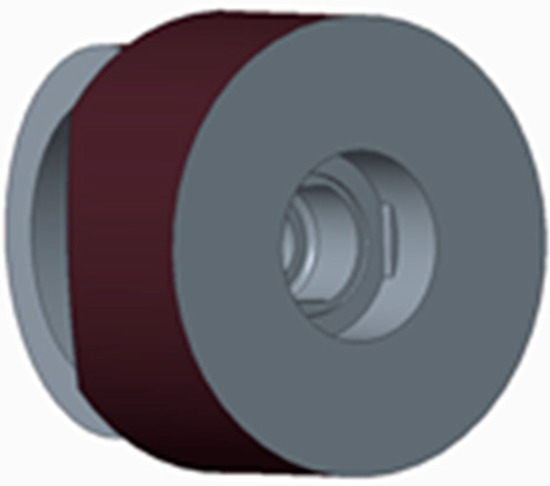
Figure 10.
Link ring.
The component is made of A356 aluminum alloy. This is a foundry alloy, as it would be much more expensive to obtain the component from a plastic strain alloy. The inner diameter of the ring is 30 mm, as the diameter of the hoverboard joint to which it must be connected to.
The articulation is shown in Figure 11:
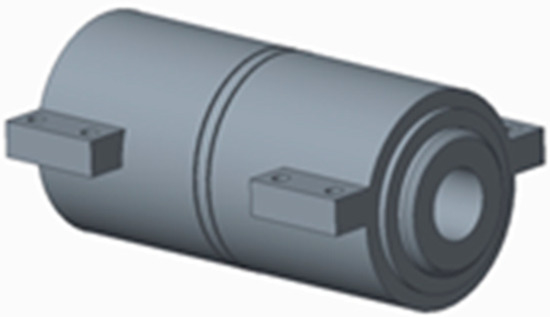
Figure 11.
Hoverboard articulation.
The interesting thing is that the joints mounted on most of the city hoverboards in the market have the same diameter; thus, the connection ring designed can be considered a “universal” connection method between any city hoverboard and any kick scooter.
The mechanical properties of the chosen alloy are:
- Yield Strength Rp0,2: 138 MPa
- Tensile strength Rm: 207 MPa
- Elongation A: 3%
4. Conclusions and Final Result (Rendering)
This project can create a new category of eco-friendly vehicles, as it can offer passengers a wide range of possible uses, thanks to its high versatility.
The designed vehicle is light and compact, satisfying the requests of the people who were interviewed on showing interest in a possible purchase of the same.
The project in this thesis takes a look at the future of urban mobility. Figure 12 and Figure 13 offer some examples of using the designed vehicle. The results of the design engineering process as shown by Hubka in 2005 [9] were reached using the QFD Method and Benchmarking Analysis.
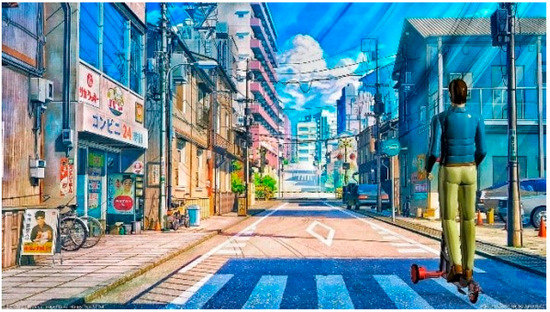
Figure 12.
Final rendering.
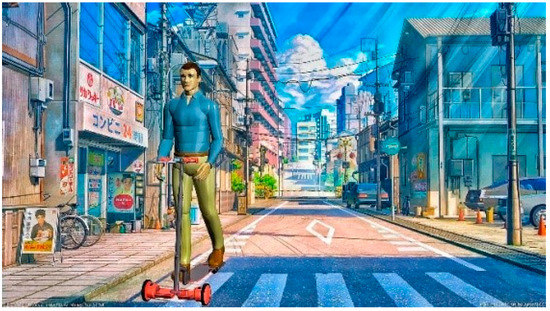
Figure 13.
Final rendering.
Six questions, interrelation matrixes, and concurrent tables analysis were applied to the project [31,32,33,34].
Figure 14, Figure 15, Figure 16 and Figure 17 show us the final assembly of the vehicle in different configurations:

Figure 14.
Final assembly.

Figure 15.
Final assembly.

Figure 16.
Final assembly.

Figure 17.
Final assembly.
The pictures above show different configurations of the designed vehicle. Figure 14 and Figure 15 show us the vehicle in its basic configuration, Figure 16 shows us the folded vehicle ready to be picked up, Figure 17 shows the way in which the hoverboard and kick scooter part are separated in order to for only the hoverboard to be used.
Another element that this electric vehicle improves compared to other vehicles (such as classic hoverboard, classic electric kick scooter or solowheel) is the sense of security and stability that is transmitted to the driver. This improvement is made possible by the presence of three wheels that rest on the ground. It is probable that due to this feature, people who previously were doubtful about the usefulness and safety of this category of means of transport now review their opinion and consider this prototype as a real alternative to bikes or public transport.
The initial phase of analysis carried out using the QFD method has helped us to understand which areas to focus on to better develop the prototype that we presented in this article [35,36].
Author Contributions
Conceptualization, L.F.; Methodology, G.D.; Data Curation, D.F.; Formal Analysis, A.L.; Validation, G.C.; Writing—original draft, F.D.B.
Funding
This research received no external funding.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Frizziero, L. Conceptual design of an innovative electric transportation means with QFD, Benchmarking, TOP-FLOP Analysis. Far East J. Electron. Commun. 2018, 18, 189–205. [Google Scholar] [CrossRef]
- Meuli, M.; Raghunath, M. Tops and flops using cultured epithelial autografts in children. Pediatr. Surg. Int. 1997, 12, 471–477. [Google Scholar] [CrossRef] [PubMed]
- Akao, Y. Quality Function Deployment: Integrating Customer Requirements into Product Design; Productivity Press: Cambridge, MA, USA, 1990. [Google Scholar]
- Bathe, K.J. Finite Element Procedures, 2nd ed.; Klaus-Jürgen Bathe: Watertown, MA, USA, 2014. [Google Scholar]
- Frizziero, L.; Donnici, G.; Francia, D.; Liverani, A.; Caligiana, G.; Cantarelli, S. Powered CAD design of a green transportation means obtained by QFD and TRIZ. In Advances in Computer Science and Engineering; Pushpa Publishing House: Allahabad, India, 2018; Volume 17, Number 2; pp. 55–74. [Google Scholar]
- Gaddoni, A. Studio di design di un mezzo di trasporto urbano innovativo. Ph.D. Thesis, Alma Mater Studiorum University of Bologna, Bologna, Italy, 2017. [Google Scholar]
- Dimitri, M. Causes, Impacts and Solutions of the Problem Generated by Traffic in Towns (In Italian, “Cause, impatti e soluzioni dei problemi generati dal traffico nelle città”). Available online: www.marcodemitri.it (accessed on 12 November 2014).
- Lorien Consulting. Forum QualeMobilità; Lorien Consulting: Milano, Italy, 2017. [Google Scholar]
- Hubka, V.; Eder, W.E. Engineering Design; Heurista: Zürich, Switzerland, 1992. [Google Scholar]
- Fargnoli, M.; Sakao, T.; Notarnicola, S. A procedure to identify effective redesign options in ecodesign. In Proceedings of the International Conference on Engineering Design ICED 05, Melbourne, Australia, 15–18 August 2005. [Google Scholar]
- Freddi, A. Imparare a progettare, Principi e metodi del progetto concettuale per lo sviluppo della creatività industriale; Pitagora: Bologna, Italy, 2005; ISBN 88-371-1512-1. [Google Scholar]
- Pahl, G.; Beitz, W.; Feldhusen, J.; et al. Engineering Design a Systematic Approach; Springer: London, UK, 2007; ISBN 978-1-84628-319-2. [Google Scholar]
- Ulrich, K.T.; Eppinger, S.D. Product Design and Development; McGraw-Hill: New York, NY, USA, 2008. [Google Scholar]
- Lam, J.S.L.; Lai, K.-H. Developing environmental sustainability by ANP-QFD approach: The case of shipping operations. J. Clean. Prod. 2015, 105, 275–284. [Google Scholar] [CrossRef]
- Brauer, J. Finite Element Analysis; Marcel Dekker: New York, NY, USA, 1988. [Google Scholar]
- Cesari, F. Introduzione al metodo degli elementi finiti; Pitagora Editrice: Bologna, Italy, 2002. [Google Scholar]
- Renzi, C.; Leali, F. A Multicriteria Decision-Making Application to the Conceptual Design of Mechanical Components. J. Multi-Criteria Decis. Anal. 2016, 23, 87–111. [Google Scholar] [CrossRef]
- Sadok Cherif, M.; Aouni, B.; Chabchoub, H. An imprecise goal programming approach for modeling design team’s preferences in quality function deployment planning process. J. Multi-Criteria Decis. Anal. 2010, 17, 137–154. [Google Scholar] [CrossRef]
- Hauser, J.R.; Clausing, D.P. The House of Quality. Harv. Bus. Rev. 1988, 66, 63–73. [Google Scholar]
- Chan, L.K.; Wu, M.L. Prioritizing the technical measures in quality function deployment. Qual. Eng. 1998, 10, 467–479. [Google Scholar] [CrossRef]
- Wu, H.-H.; Liao, A.Y.H.; Wang, P.-C. Using grey theory in quality function deployment to analyse dynamic customer requirements. Int. J. Adv. Manuf. Technol. 2005, 25, 1241–1247. [Google Scholar] [CrossRef]
- Wu, H.-H. Applying grey model to prioritise technical measures in quality function deployment. Int. J. Adv. Manuf. Technol. 2006, 29, 1278–1283. [Google Scholar] [CrossRef]
- Wu, H.-H.; Shieh, J.-I. Applying repertory grids technique for knowledge elicitation in quality function deployment. Qual. Quant. 2010, 44, 1139–1149. [Google Scholar] [CrossRef]
- Cristiano, J.J.; Liker, J.K.; White, C.C. Key Factors in the Successful Application of Quality Function Deployment (QFD). IEEE Trans. Eng. Manang. 2001, 48, 81–95. [Google Scholar] [CrossRef]
- Zeithaml, V.A.; Berry, L.L.; Parasuraman, A. The behavioral consequences of service quality. J. Mark. 1996, 60, 31–46. [Google Scholar] [CrossRef]
- Gherardini, F.; Renzi, C.; Leali, F. A Systematic User-Centred Framework for Engineering Product Design in Small and Medium-sized Enterprises (SMEs). Int. J. Adv. Manuf. Technol. 2017, 91, 1723–1746. [Google Scholar] [CrossRef]
- Turner, M.J.; Clough, R.W.; Martin, H.C.; Topp, L.J. Stiffness and Deflection Analysis of Complex Structures. J. Aeronaut. Sci. 1956, 23, 805–823. [Google Scholar] [CrossRef]
- Hrennikoff, A. Solution of problems of elasticity by the framework method. J. Appl. Mech. 1941, 8, 169–175. [Google Scholar]
- Strang, G.; Fix, G. An Analysis of the Finite Element Method; Prentice Hall: Upper Saddle River, NJ, USA, 1973. [Google Scholar]
- Clough, R.W. The Finite Element Method, in Plane Stress Analysis. In Proceedings of the 2nd ASCE Conference on Electronic Computation, Pittsburgh, PA, USA, 8–9 September 1960. [Google Scholar]
- Frizziero, L.; Francia, D.; Donnici, G.; Caligiana, G.; Liverani, L. Sustainable design of open molds with QFD and TRIZ combination. J. Ind. Prod. Eng. 2018, 35, 21–31. [Google Scholar]
- Francia, D.; Caligiana, G.; Liverani, A.; Frizziero, L.; Donnici, G. PrinterCAD: A QFD and TRIZ integrated design solution for large size open moulding manufacturing. Int. J. Interact. Des. Manuf. 2018, 12, 81–94. [Google Scholar] [CrossRef]
- Ghezzo, F.; Giannini, G.; Cesari, F.; Caligiana, G. Numerical and experimental analysis of the interaction between two notches in carbon fibre laminates. Compos. Sci. Technol. 2008, 68, 1057–1072. [Google Scholar] [CrossRef]
- Caligiana, G.; Liverani, A.; Francia, D.; Frizziero, L.; Donnici, G. Integrating QFD and TRIZ for innovative design. J. Adv. Mech. Des. Syst. Manuf. 2017, 11. [Google Scholar] [CrossRef]
- Argyris, J.H.; Balmer, H.; Doltsinis, J.S.; Dunne, P.C.; Haase, M.; Kleiber, M.; Malejannakis, G.A.; Mlejnek, H.-P.; Müller, M.; Scharpf, D.W. Finite element method—The natural approach. Comput. Methods Appl. Mech. Eng. 1979, 1, 17–18. [Google Scholar] [CrossRef]
- Pahl, G.; Beitz, W.; Feldhusen, J.; Grote, K.-H. Engineering Design, a Systematic Approach; Springer: London, UK, 1977. [Google Scholar]






































© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).