
Artificial Intelligence-Driven and Bio-Inspired Control Strategies for Industrial Robotics: A Systematic Review of Trends, Challenges, and Sustainable Innovations Toward Industry 5.0


Abstract
1. Introduction
2. Methods
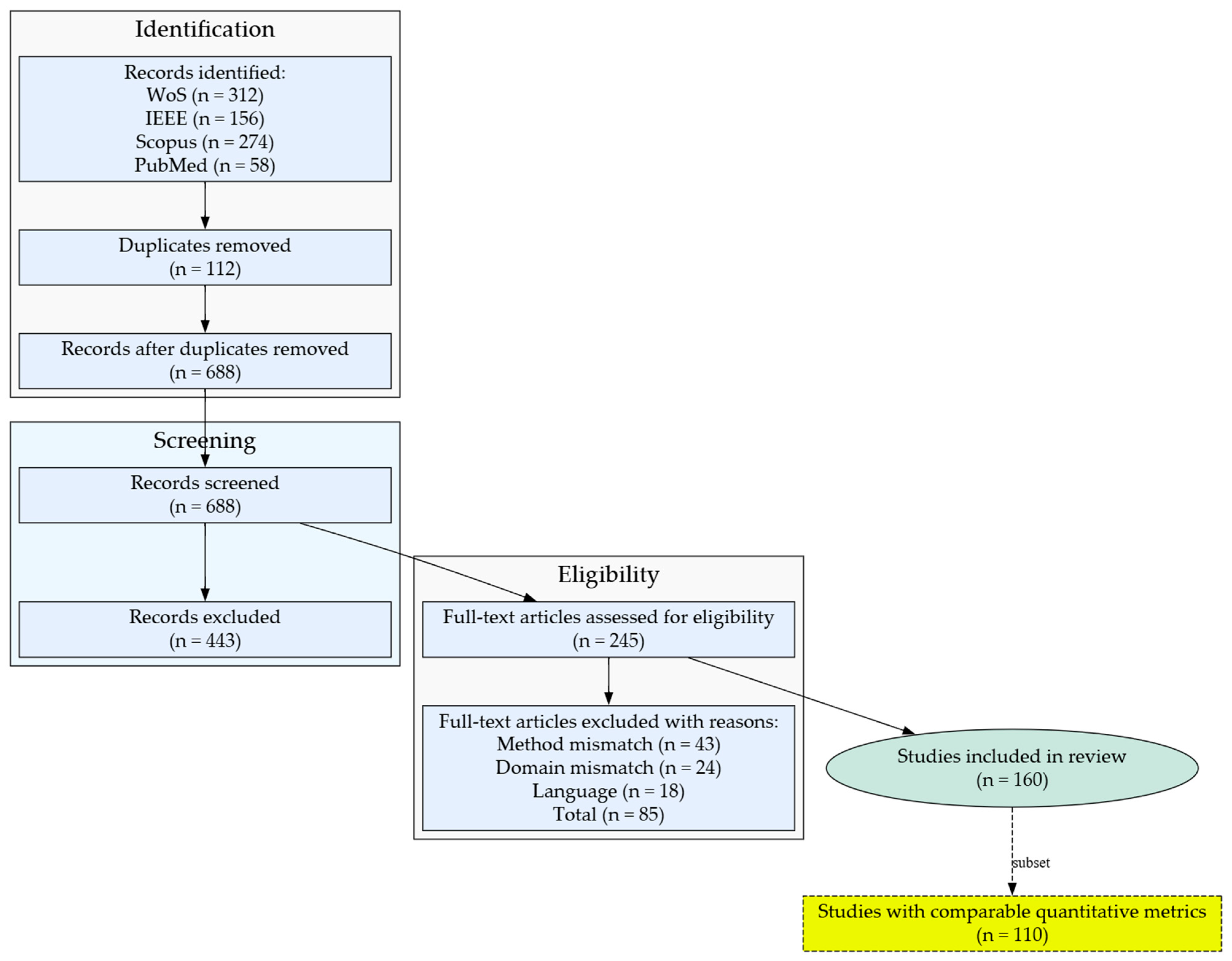
2.1. Search Strategy
2.2. Inclusion and Exclusion Criteria
2.3. Screening and Selection
2.4. Data Extraction and Synthesis
2.5. Protocol Registration and Limitations
3. Advances in Control Strategies
- Model-free, learning-based approaches (deep RL) improve positional accuracy by ≈70% and reduce energy by ≈38% relative to the PID baseline, while still meeting the <25 ms cycle-time constraints required for high-speed assembly.
- Digital twin-assisted MPC and quantum-inspired optimization offer the best overall trade-off, achieving <10 µm mean error and <7 J/cycle energy, which are critical for ultra-precision, energy-regulated production lines.
- Bio-inspired evolutionary controllers remain attractive for redundant or highly non-linear manipulators, but longer cycle times (>30 ms) currently limit uptake in fast takt-time environments.
3.1. Adaptive and Robust Control
Nonlinear and Resilient Control Approaches
3.2. AI-Driven Control
Multi-Agent and Bio-Inspired AI Control
3.3. Human–Robot Collaboration
Sensor-Based Human–Robot Collaboration Enhancements
3.4. Digital Twins in Robot Control
Multi-Robot and Sector-Specific Digital Twins
3.5. Energy-Efficient Control Strategies
Circular-Economy Metrics
3.6. Cybersecurity in Robot Control
3.7. Bio-Inspired and Soft Robotics Control
3.8. Ethical and Socio-Technical Considerations
3.9. Distributed and Multi-Robot Control
3.10. Control in Additive Manufacturing
3.11. Quantum-Inspired Control Strategies
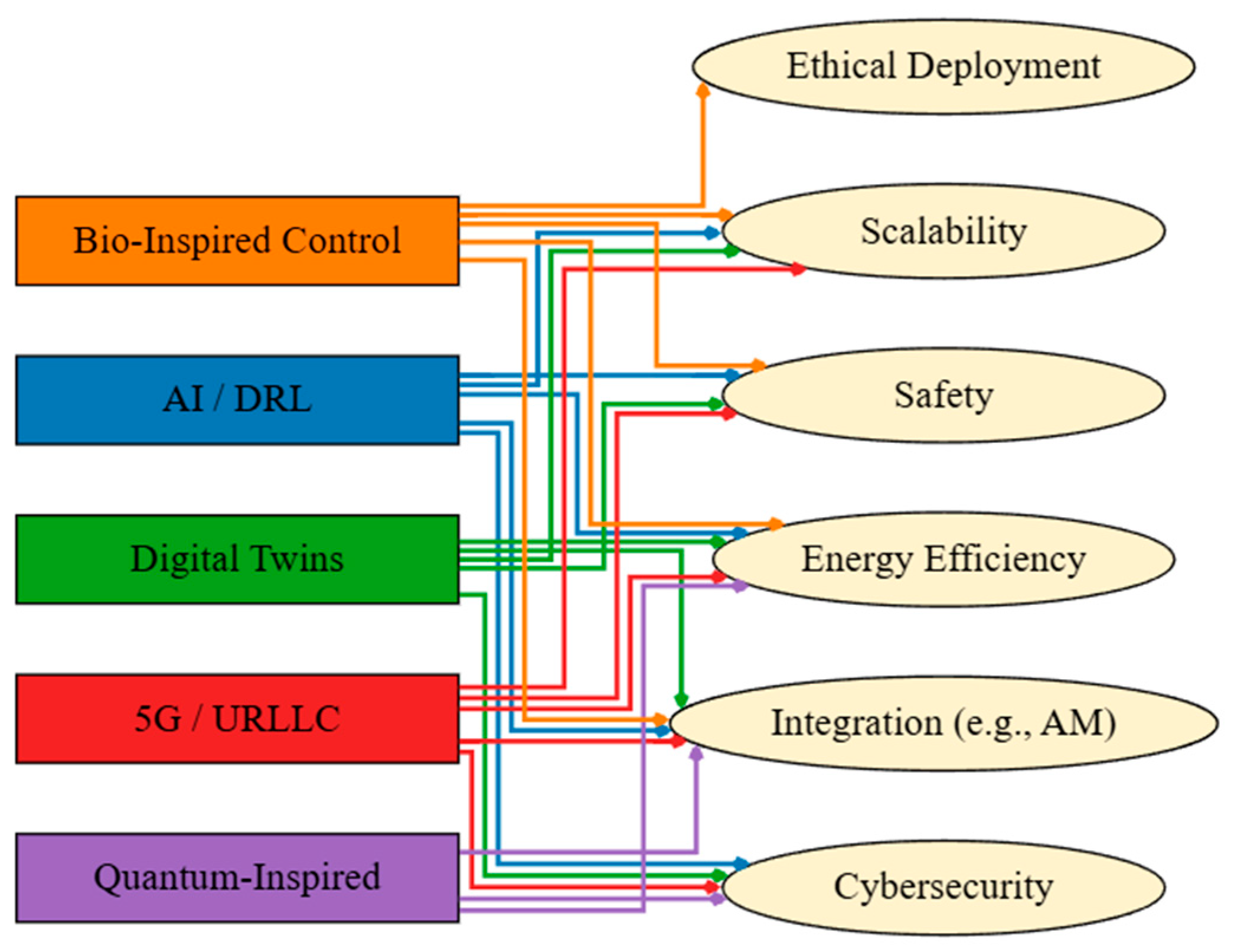
4. Challenges in Industrial Robot Control
- Scalability: The high computational demands of AI-based controllers limit deployment in small-scale industries. Mishra et al. [45] reported a ~40% higher processing load for multi-agent DRL versus centralized heuristics. Nievas et al. [72] highlighted a ~30% scalability gap in autonomous process control (see also Aljamal et al. [40] for ROS/DRL deployment constraints). Chew et al. [30] and Li et al. [31] found 15–20% additional compute overheads in additive manufacturing (AM) control workflows. Quantum-inspired acceleration could mitigate compute by up to ~25% in simulation studies [20], but practical deployment remains constrained by specialized hardware (cryogenic/photonic) and advanced network protocols that are rarely available in conventional industrial environments.
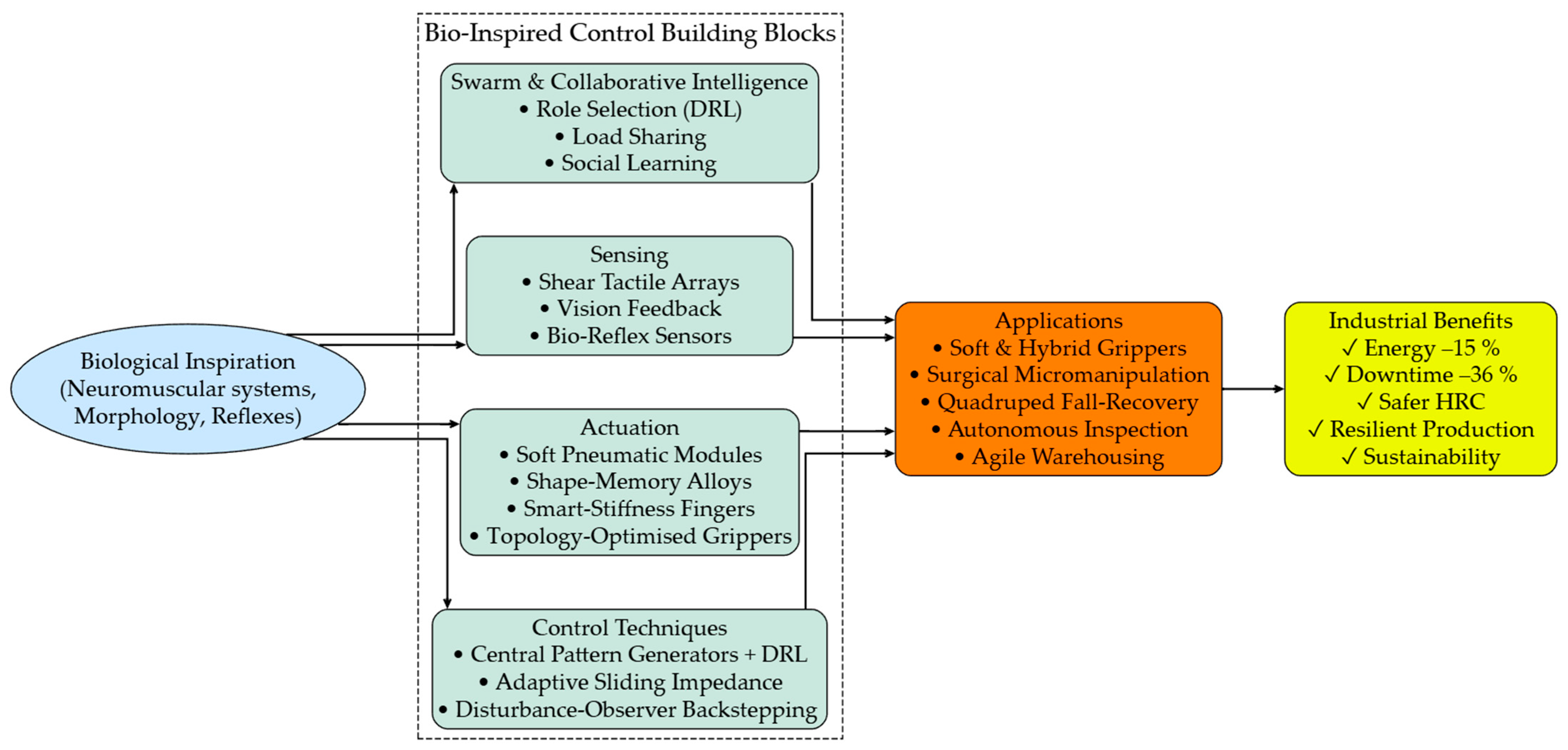
- Energy Efficiency: Power-intensive algorithms can undermine sustainability goals. Wang et al. [63] observed up to a ~25% energy overhead for DRL motion planning relative to cubic spline trajectories. Ho et al. [80] identified a ~20% efficiency loss in 5G robotic communications under round-robin URLLC scheduling. Bio-inspired end-effector approaches [19] cut energy by ~18% vs. motor-driven parallel-jaw grippers, and soft/continuum pressure-adaptive control [74] reduced power by ~15% vs. proportional pressure control, though broader scaling and cost remain hurdles [73,81,82].
- Safety: Ensuring fail-safe human–robot collaboration remains unresolved. Feng et al. [47] documented a ~15% gap in real-time safety validation beyond ISO 10218 static-zone assumptions. Van Duong [48] reported a ~10% residual collision risk versus tactile-free impedance control. Garg et al. [120] identified ~20% safety verification gaps in multi-robot systems. Tactile and multi-modal sensing can reduce collision risk by ~20% [46,50], yet real-time integration and standardization lag behind adoption.
- Cybersecurity: He et al. [34] measured ~20% exploitable vulnerability in networked robots under deception attacks, aggravated by 5G exposure. Santoso and Finn [24] still observed a ~15% successful attack penetration despite AI-augmented defenses. Digital twin cyber ranges reduced exploitable vectors by ~15% in production cells [26], but full resilience depends on standardized, interoperable security protocols spanning the edge, network, and controller layers [22,64,95].
- Ethical Deployment: Howard and Schulte [116] warn of a ~20% higher risk exposure in the absence of formal ethical frameworks. Callari et al. [114] identify ~10% trust gaps in HRC adoption. Pareto and Coeckelbergh [117] report ~12% autonomy challenges; these socio-technical shortfalls compound the operational risk in Industry 5.0 unless mitigated through governance, training, and inclusive design [78].
- Complexity in Additive Manufacturing: Chew et al. [30] note ~15% added real-time monitoring complexity in high-resolution AM cells; Hartomacıoğlu et al. [32] report a ~20% design optimization burden when lightweight AM tooling is introduced [28]; An et al. [29] highlight ~10% prediction accuracy gaps that limit large-scale AM/robot integration.
 = limited evidence/prototype/cost barrier; – = unproven or insufficient data (representative references in footnote).
= limited evidence/prototype/cost barrier; – = unproven or insufficient data (representative references in footnote).5. Future Directions
5.1. Quantified Trajectories and Comparative Baselines
5.2. Sectoral Implications
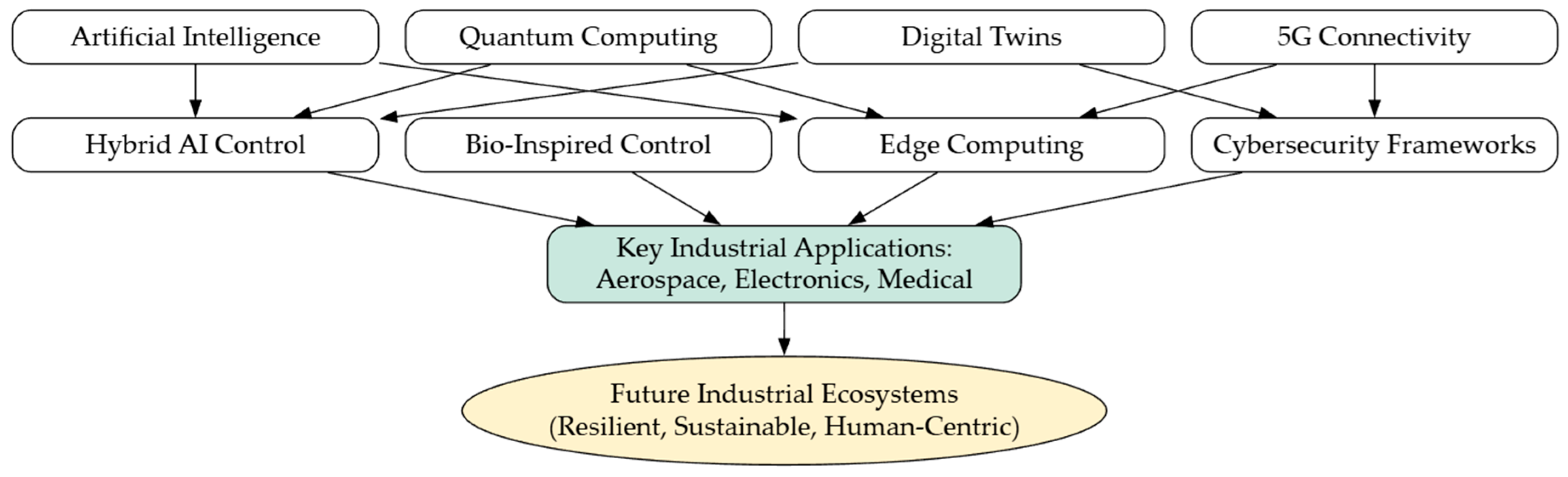
5.3. Historical and Forward-Looking Context
6. Conclusions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| 5G | Fifth-Generation Mobile/Wireless Networks |
| AI/ML | Artificial Intelligence/Machine Learning |
| AM | Additive Manufacturing |
| ANN | Artificial Neural Network |
| CPG | Central Pattern Generator |
| DoF | Degrees of Freedom |
| DT | Digital Twin (virtual representation linked to a physical asset; plural: DTs) |
| DRL | Deep Reinforcement Learning |
| EU | European Union |
| FDI | Faults, Disruptions, and Interference (used in the resilient multi-robot control) |
| FLC | Fuzzy Logic Controller |
| GAN | Generative Adversarial Network |
| HRC | Human–Robot Collaboration |
| IoT | Internet of Things |
| IIoT | Industrial Internet of Things |
| IEC | International Electrotechnical Commission |
| ISO | International Organization for Standardization |
| ISO/TS | International Organization for Standardization/Technical Specification (used in ISO/TS 15066) |
| KPI | Key Performance Indicator |
| LCA | Life-Cycle Assessment |
| LSTM | Long Short-Term Memory (recurrent neural network unit) |
| MPC | Model Predictive Control |
| MES | Manufacturing Execution System |
| PID | Proportional–Integral–Derivative |
| PRISMA | Preferred Reporting Items for Systematic Reviews and Meta-Analyses |
| PLC | Programmable Logic Controller |
| ROS | Robot Operating System |
| RL | Reinforcement Learning |
| SMC | Sliding-Mode Control |
| SME(s) | Small- and Medium-Sized Enterprise(s) |
| TLS | Transport Layer Security |
| OAuth 2.0 | Open Authorization Protocol 2.0 |
| OPC UA | Open Platform Communications Unified Architecture |
| URLLC | Ultra-Reliable Low-Latency Communications |
| WoS | Web of Science |
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Database/Platform | Boolean Search String * | Fields Searched |
|---|---|---|
| Web of Science Core Collection | TS = (“industrial robot” OR “factory robot” OR “robotic manufacturing” OR “robotic cell*”) AND TS = (“control” OR “adaptive” OR “intelligent” OR “AI” OR “digital twin*” OR “5G” OR “human-centric” OR “bio-inspired” OR “cybersecurity” OR “additive manufacturing” OR “multi-robot” OR “quantum control” OR “real-time optimization”) | Topic (Title, Abstract, Author Keywords, Keywords Plus) |
| IEEE Xplore | (“industrial robot” OR “robotic cell” OR “factory robot”) AND (“control” OR “adaptive” OR “AI” OR “digital twin” OR “5G” OR “cybersecurity” OR “human-centric” OR “bio-inspired” OR “additive manufacturing” OR “multi-robot” OR “quantum control” OR “real-time optimization”) | Metadata (Document Title, Abstract, Index Terms) |
| Scopus | TITLE-ABS-KEY(“industrial robot” OR “robotic manufacturing” OR “factory robot” OR “robotic cell*”) AND TITLE-ABS-KEY(“control” OR “adaptive” OR “intelligent” OR “AI” OR “digital twin*” OR “5G” OR “human-centric” OR “bio-inspired” OR “cybersecurity” OR “additive manufacturing” OR “multi-robot” OR “quantum control” OR “real-time optimization”) | Title, Abstract, Keywords |
| PubMed | ((“industrial robotics”[Title/Abstract]) OR (“industrial robot”[Title/Abstract]) OR (“factory robot”[Title/Abstract])) AND (“control”[Title/Abstract] OR “AI”[Title/Abstract] OR “digital twin”[Title/Abstract] OR “adaptive”[Title/Abstract] OR “5G”[Title/Abstract] OR “cybersecurity”[Title/Abstract]) | Title, Abstract |
| Domain | Inclusion Criteria | Exclusion Criteria |
|---|---|---|
| Publication type |
|
|
| Language |
|
|
| Industrial scope |
|
|
| Topic focus |
|
|
| Validation |
|
|
| Availability |
|
|
| Ref. No. | Primary Theme | Control Focus/Contribution | Industrial Relevance | Metrics Used in Quant Subset? | Where Discussed |
|---|---|---|---|---|---|
| [96] | Tactile shear sensing | Shear-based grasp stabilization for under-actuated multifingered hands | Flexible parts handling; assembly | No (heterogeneous metrics) | Section 3.7 |
| [97] | Hybrid soft–rigid gripper | Pinch-suction multimodal grasp control | Packaging/e-commerce pick | No | Section 3.7 |
| [98] | Review: dexterous hands | Tech trends; control architectures for mfg | Broad; maps gaps | No | Section 3.7 |
| [99] | Review: anthropomorphic manipulation | Human-like dexterous control survey | Flexible assembly | No | Section 3.7 |
| [100] | Hybrid loops (DT + NN + MPC) | Advanced multi-loop control, energy focus | Process/energy industries | Limited (not normalized) | Section 3.7 |
| [101] | Adaptive impedance micro-manipulation | Neural-learning sliding mode force control | Transferable to precision dosing/micro-assembly | No | Section 3.7 |
| [102] | Compliant gripper design | Topology–shape–size optimization | Flexible pick-and-place | No | Section 3.7 |
| [103] | Variable stiffness | Smart stiffness modulation in soft gripper fingers | Reconfigurable tooling | No | Section 3.7 |
| [104] | DRL multi-robot search | Role selection for collaborative teams | Inspection/logistics | No | Section 3.7 |
| [105] | Social-learning coordination | Resilient multi-robot production | Smart factory lines | No | Section 3.7 |
| [106] | Distributed load sharing | Collaborative manipulation control | Heavy-payload assembly | No | Section 3.7 |
| [107] | CPG neural control | Multi-skill locomotion learning | Mobile industrial platforms | No | Section 3.7 |
References
- Chen, C.; Zhao, K.; Leng, J.; Liu, C.; Fan, J.; Zheng, P. Integrating Large Language Model and Digital Twins in the Context of Industry 5.0: Framework, Challenges and Opportunities. Robotics Comput.-Integr. Manuf. 2025, 94, 102982. [Google Scholar] [CrossRef]
- Langås, E.F.; Zafar, M.H.; Sanfilippo, F. Exploring the Synergy of Human-Robot Teaming, Digital Twins, and Machine Learning in Industry 5.0: A Step towards Sustainable Manufacturing. J. Intell. Manuf. 2025, 78, 1–24. [Google Scholar] [CrossRef]
- Teng, S.; Wang, Y.; Wang, X.; Li, J.; Li, Y.; Zhang, X.; Li, L.; Chen, L.; Wang, F.-Y. The ParallelWorkforce: A Framework for Synergistic Collaboration in Digital, Robotic, and Biological Workers of Industry 5.0. IEEE Trans. Comput. Soc. Syst. 2024. [Google Scholar] [CrossRef]
- Čakurda, T.; Trojanová, M.; Pomin, P.; Hošovský, A. Deep Learning Methods in Soft Robotics: Architectures and Applications. Adv. Intell. Syst. 2024, 7, 2400576. [Google Scholar] [CrossRef]
- Kojima, T.; Asakura, K.; Gobbo, P.; Banno, T. Programmed Fabrication of Vesicle-Based Prototissue Fibers with Modular Functionalities. Adv. Sci. 2025, 12, 2409066. [Google Scholar] [CrossRef]
- Li, Y.; Wang, Z.; Lu, Y.; Li, H.; Weng, Z.; Sun, J.; Zhang, Y.; Zhang, T.; Wang, X.S. Thermal Gradient-Driven Heterogeneous Actuation of Liquid Crystal Elastomers for a Crawling Robot. ACS Appl. Mater. Interfaces 2025, 17, 9992–10003. [Google Scholar] [CrossRef]
- Alvira, M.; Mondini, A.; Puleo, G.L.; Tahirbegi, I.B.; Beccai, L.; Sadeghi, A.; Mazzolai, B.; Mir, M.; Samitier, J. Biomimetic Plant-Root-Inspired Robotic Sensor System. Biosensors 2024, 14, 565. [Google Scholar] [CrossRef]
- Greco, G.; Schmuck, B.; Del Bianco, L.; Spizzo, F.; Fambri, L.; Pugno, N.M.; Veintemillas-Verdaguer, S.; Morales, M.P.; Rising, A. High-Performance Magnetic Artificial Silk Fibers Produced by a Scalable and Eco-Friendly Production Method. Adv. Compos. Hybrid Mater. 2024, 7, 163. [Google Scholar] [CrossRef] [PubMed]
- Yu, M.; Cheng, X.; Peng, S.; Zhao, L.; Wang, P. A Tactile Sensing System Capable of Recognizing Objects Based on Bioinspired Self-Sensing Soft Pneumatic Actuator. Bioinspir. Biomim. 2024, 19, 056009. [Google Scholar] [CrossRef] [PubMed]
- Kaczmarski, B.; Moulton, D.E.; Goriely, A.; Kuhl, E. Minimal Activation with Maximal Reach: Reachability Clouds of Bio-Inspired Slender Manipulators. Extrem. Mech. Lett. 2024, 71, 102207. [Google Scholar] [CrossRef]
- Lu, H.; Zhao, M.; Zhang, Q.; Yang, J.; Chen, Z.; Gong, L.; Zhou, X.; Deng, L.; Du, H.; Zhang, S.; et al. Liquid Metal Chameleon Tongues: Modulating Surface Tension and Phase Transition to Enable Bioinspired Soft Actuators. Adv. Intell. Syst. 2024, 6, 2400231. [Google Scholar] [CrossRef]
- Önder, E.T.; Sümer, B.; Başlamişli, S.C. Development of a Novel Two-Way 3D Printed Flexible Spiral Composite Actuator Based on Shape Memory Alloy Wire and Its Control. Smart Mater. Struct. 2024, 33, 075011. [Google Scholar] [CrossRef]
- Marques Monteiro, R.; Shi, J.; Wurdemann, H.; Iida, F.; George Thuruthel, T. Visuo-Dynamic Self-Modelling of Soft Robotic Systems. Front. Robot. AI 2024, 11, 1403733. [Google Scholar] [CrossRef]
- Sayahkarajy, M.; Witte, H.; Faudzi, A.A.M. Chorda Dorsalis System as a Paragon for Soft Medical Robots to Design Echocardiography Probes with a New SOM-Based Steering Control. Biomimetics 2024, 9, 199. [Google Scholar] [CrossRef]
- Tang, Y.; Zhong, Y.; Tao, J. Bio-Inspired Rotational Penetration and Horizontal Self-Burrowing Soft Robot. Acta Geotech. 2024, 19, 1345–1363. [Google Scholar] [CrossRef]
- Winand, J.; Büscher, T.H.; Gorb, S.N. TriTrap: A Robotic Gripper Inspired by Insect Tarsal Chains. Biomimetics 2024, 9, 142. [Google Scholar] [CrossRef] [PubMed]
- Li, H.; Bai, H.; Wang, Z.; Tan, Y.; Tang, Y. Soft Bioinspired Pneumatic Actuator for Adaptive Grasping Based on Direct Ink Writing Method. Sens. Actuators A Phys. 2024, 367, 115041. [Google Scholar] [CrossRef]
- Mbakop, S.; Tagne, G.; Chevillon, T.; Drakunov, S.V.; Merzouki, R. PH-Gauss-Lobatto Reduced-Order-Model for Shape Control of Soft-Continuum Manipulators. IEEE Trans. Robot. 2024, 40, 2641–2655. [Google Scholar] [CrossRef]
- Firouzeh, A.; Lee, J.; Yang, H.; Lee, D.; Cho, K.-J. Perching and Grasping Using a Passive Dynamic Bioinspired Gripper. IEEE Trans. Robot. 2024, 40, 213–225. [Google Scholar] [CrossRef]
- Yan, F.; Iliyasu, A.M.; Li, N.; Salama, A.S.; Hirota, K. Quantum robotics: A review of emerging trends. Quantum Mach. Intell. 2024, 6, 86. [Google Scholar] [CrossRef]
- Papoutsakis, M.; Hatzivasilis, G.; Michalodimitrakis, E.; Ioannidis, S.; Michael, M.; Savva, A.; Nikolaou, P.; Stokkou, E.; Bozdemir, G. SESAME: Automated Security Assessment of Robots and Modern Multi-Robot Systems. Electronics 2025, 14, 923. [Google Scholar] [CrossRef]
- De Vincenzi, M.; Moore, J.; Smith, B.; Sarma, S.E.; Matteucci, I. Security Risks and Designs in the Connected Vehicle Ecosystem: In-Vehicle and Edge Platforms. IEEE Open J. Veh. Technol. 2025, 6, 442–454. [Google Scholar] [CrossRef]
- Alazab, M.; Abu Khurma, R.; García-Arenas, M.; Jatana, V.; Baydoun, A.; Damaševičius, R. Enhanced Threat Intelligence Framework for Advanced Cybersecurity Resilience. Egypt. Inform. J. 2024, 27, 100521. [Google Scholar] [CrossRef]
- Santoso, F.; Finn, A. An In-Depth Examination of Artificial Intelligence-Enhanced Cybersecurity in Robotics, Autonomous Systems, and Critical Infrastructures. IEEE Trans. Serv. Comput. 2024, 17, 1293–1310. [Google Scholar] [CrossRef]
- Zhong, Y.; Wen, Y.; Hopko, S.; Karthikeyan, A.; Pagilla, P.; Mehta, R.K.; Bukkapatnam, S.T.S. Detecting Anomalous Robot Motion in Collaborative Robotic Manufacturing Systems. IEEE Internet Things J. 2024, 11, 13722–13733. [Google Scholar] [CrossRef]
- Jiang, Y.; Wang, W.; Ding, J.; Lu, X.; Jing, Y. Leveraging Digital Twin Technology for Enhanced Cybersecurity in Cyber–Physical Production Systems. Future Internet 2024, 16, 134. [Google Scholar] [CrossRef]
- Rescsanski, S.; Hebert, R.; Haghighi, A.; Tang, J.; Imani, F. Towards Intelligent Cooperative Robotics in Additive Manufacturing: Past, Present, and Future. Robot. Comput.-Integr. Manuf. 2025, 93, 102925. [Google Scholar] [CrossRef]
- Mahdi, M.M.; Sadeqi Bajestani, M.; Noh, S.D.; Kim, D.B. Digital Twin-Based Architecture for Wire Arc Additive Manufacturing Using OPC UA. Robot. Comput.-Integr. Manuf. 2025, 94, 102944. [Google Scholar] [CrossRef]
- An, Z.; Sun, H.; Zhang, X. Bead Geometry Prediction for Gas Metal Arc Directed Energy Deposited Layer Using Interpretable Machine Learning. Mater. Today Commun. 2025, 42, 111138. [Google Scholar] [CrossRef]
- Chew, S.Y.; Asadi, E.; Vargas-Uscategui, A.; King, P.; Gautam, S.; Bab-Hadiashar, A.; Cole, I. In-Process 4D Reconstruction in Robotic Additive Manufacturing. Robot. Comput.-Integr. Manuf. 2024, 89, 102784. [Google Scholar] [CrossRef]
- Li, M.; Li, P.; Wei, D.; Lin, J.; Wei, X.; Tian, W.; Liao, W. Research on Dual-Robot Cooperative Path Planning for Multi-Material Additive Manufacturing. Int. J. Adv. Manuf. Technol. 2024, 135, 4229–4244. [Google Scholar] [CrossRef]
- Hartomacıoğlu, S.; Kaya, E.; Eker, B.; Dağlı, S.; Sarıkaya, M. Characterization, Generative Design, and Fabrication of a Carbon Fiber-Reinforced Industrial Robot Gripper via Additive Manufacturing. J. Mater. Res. Technol. 2024, 33, 3714–3727. [Google Scholar] [CrossRef]
- Li, T.; Cao, Y.; Ye, Q.; Zhang, Y. Generative Adversarial Networks (GAN) Model for Dynamically Adjusted Weld Pool Image toward Human-Based Model Predictive Control (MPC). J. Manuf. Process. 2025, 141, 210–221. [Google Scholar] [CrossRef]
- He, N.; Ma, K.; Li, H.; Fan, Z. Adaptive Input Reconstruction Based Resilient MPC Against Deception Attacks. IEEE Trans. Ind. Electron. 2025, 72, 938–948. [Google Scholar] [CrossRef]
- Song, Z.; Bao, D.; Wang, W.; Zhao, W. Adaptive Dynamic Boundary Sliding Mode Control for Robotic Manipulators under Varying Disturbances. Electronics 2024, 13, 900. [Google Scholar] [CrossRef]
- Yazdanparast, S.A.; Zegordi, S.H.; Khatibi, T. Proposing a Model Based on Deep Reinforcement Learning for Real-Time Scheduling of Collaborative Customization Remanufacturing. Robots Comput.-Integr. Manuf. 2025, 94, 102980. [Google Scholar] [CrossRef]
- Zhao, B.; Wu, Y.; Wu, C.; Sun, R. Deep Reinforcement Learning Trajectory Planning for Robotic Manipulator Based on Simulation-Efficient Training. Sci. Rep. 2025, 15, 8286. [Google Scholar] [CrossRef]
- Li, Z.; Zhou, Y.; Wang, L.; Zhang, X.; Li, A.; Zhu, M.; Wu, Q. An End-to-End Controller with Image-Based Visual Servoing of Industrial Manipulators with Soft-Actor-Critic Algorithm. Knowl.-Based Syst. 2025, 311, 112980. [Google Scholar] [CrossRef]
- Hsu, M.-J.; Hsu, C.-C.; Chien, Y.-H.; Wang, W.-Y. The Cognitive System of Robots Based on Deep Learning with Stable Convergence. Int. J. Fuzzy Syst. 2025, 27, 1–23. [Google Scholar] [CrossRef]
- Aljamal, M.; Patel, S.; Mahmood, A. Comprehensive Review of Robotics Operating System-Based Reinforcement Learning in Robotics. Appl. Sci. 2025, 15, 1840. [Google Scholar] [CrossRef]
- Wang, F.; Hu, J.; Qin, Y.; Guo, F.; Jiang, M. Trajectory Tracking Control Based on Deep Reinforcement Learning for a Robotic Manipulator with an Input Deadzone. Symmetry 2025, 17, 149. [Google Scholar] [CrossRef]
- Park, J.; Baek, J.; Song, Y. Optimizing Smart City Planning: A Deep Reinforcement Learning Framework. ICT Express 2025, 11, 129–134. [Google Scholar] [CrossRef]
- Park, Y.; Lee, J.; Sim, D.; Cho, Y.; Park, C. Designing Spiking Neural Network-Based Reinforcement Learning for 3D Robotic Arm Applications. Electronics 2025, 14, 578. [Google Scholar] [CrossRef]
- Mu, X.; Kan, Q.; Jiang, Y.; Chang, C.; Tian, X.; Zhou, L.; Zhao, Y. 3D Vision Robot Online Packing Platform for Deep Reinforcement Learning. Robotics Comput.-Integr. Manuf. 2025, 94, 102941. [Google Scholar] [CrossRef]
- Mishra, M.; Poddar, P.; Agrawal, R.; Chen, J.; Tokekar, P.; Sujit, P.B. Multi-Agent Deep Reinforcement Learning for Persistent Monitoring with Sensing, Communication, and Localization Constraints. IEEE Trans. Autom. Sci. Eng. 2025, 22, 2831–2843. [Google Scholar] [CrossRef]
- Cho, J.; Choi, D.; Lee, D.-Y.; Lee, D.-W. Model Predictive Control-Based Sensorless Physical Human–Robot Interaction of a Dual-Arm Social Robot. IEEE Access 2024, 12, 175511–175524. [Google Scholar] [CrossRef]
- Feng, B.; Wang, Z.; Yuan, L.; Zhou, Q.; Chen, Y.; Bi, Y. Towards Safe Motion Planning for Industrial Human-Robot Interaction: A Co-Evolution Approach Based on Human Digital Twin and Mixed Reality. Robotics Comput.-Integr. Manuf. 2025, 95, 103012. [Google Scholar] [CrossRef]
- Van Duong, L. A Tactile Reflex Arc for Physical Human–Robot Interaction. Mechatronics 2025, 107, 103307. [Google Scholar] [CrossRef]
- Zhang, Y.; Peng, F.; Wan, Y.; Chen, C.; Gao, Z.; Liu, H.; Wang, Y.; Yan, R.; Tang, X. Scaled Non-Passive Environmental Interaction Force Tracking for Telerobotic Manufacturing System with Variable Time Delay. Sci. China Technol. Sci. 2025, 68, 1320301. [Google Scholar] [CrossRef]
- Li, S.; Xu, J. Multiaxis Force/Torque Sensor Technologies: Design Principles and Robotic Force Control Applications: A Review. IEEE Sens. J. 2025, 25, 4055–4069. [Google Scholar] [CrossRef]
- Park, J.; Kim, J.-J.; Koh, D.-Y. Experimental Evaluation of Precise Placement with Pushing Primitive Based on Cartesian Force Control. Appl. Sci. 2025, 15, 387. [Google Scholar] [CrossRef]
- Chen, Y.; Yu, J.; Lin, Z.; Shen, L.; Liu, Z. Learning Latent Causal Factors from the Intricate Sensor Feedback of Contact-Rich Robotic Assembly Tasks. Robotics Auton. Syst. 2025, 183, 104832. [Google Scholar] [CrossRef]
- Lu, Z.; Si, W.; Wang, N.; Yang, C. Dynamic Movement Primitives-Based Human Action Prediction and Shared Control for Bilateral Robot Teleoperation. IEEE Trans. Ind. Electron. 2024, 71, 16654–16663. [Google Scholar] [CrossRef]
- Zhang, C.; Zhang, Y.; Liu, S.; Wang, L. Transfer Learning and Augmented Data-Driven Parameter Prediction for Robotic Welding. Robotics Comput.-Integr. Manuf. 2025, 95, 102992. [Google Scholar] [CrossRef]
- Putranto, A.; Lin, T.-H.; Tsai, P.-T. Digital Twin-Enabled Robotics for Smart Tag Deployment and Sensing in Confined Space. Robotics Comput.-Integr. Manuf. 2025, 95, 102993. [Google Scholar] [CrossRef]
- Ali, A.R.; Ramadan, M.W.A. Artificial Neural Networks as Digital Twins for Whispering Gallery Mode Optical Sensors in Robotics Applications. Photonic Sens. 2025, 15, 250206. [Google Scholar] [CrossRef]
- Alonso, R.; Sánchez, T.F.; Alfaro, D.A.; Cruz, Y.J.; Villalonga, A.; Castaño, F. Automation and Robotics Pilot Lines in the Context of Industry 5.0. Appl. Sci. 2025, 15, 2510. [Google Scholar] [CrossRef]
- Cristoiu, C.; Ivan, A.M. Integration of Real Signals Acquired Through External Sensors into RoboDK Simulation of Robotic Industrial Applications. Sensors 2025, 25, 1395. [Google Scholar] [CrossRef]
- Alfaro-Viquez, D.; Zamora-Hernandez, M.; Fernandez-Vega, M.; Garcia-Rodriguez, J.; Azorin-Lopez, J. A Comprehensive Review of AI-Based Digital Twin Applications in Manufacturing: Integration Across Operator, Product, and Process Dimensions. Electronics 2025, 14, 646. [Google Scholar] [CrossRef]
- Sreedharan, S.; Ramachandran, M.; Ramesh, D. Harnessing Digital Twins and Industrial-IoT for Cutting-Edge Mining Automation: A Methodological and Technology Assessment Prototype. Comput. Ind. Eng. 2025, 201, 110871. [Google Scholar] [CrossRef]
- Singh, M.; Kapukotuwa, J.; Gouveia, E.L.S.; Fuenmayor, E.; Qiao, Y.; Murray, N.; Devine, D. Comparative Study of Digital Twin Developed in Unity and Gazebo. Electronics 2025, 14, 276. [Google Scholar] [CrossRef]
- Oo, K.H.; Koomsap, P.; Hussadintorn Na Ayutthaya, D. Digital Twin-Enabled Multi-Robot System for Collaborative Assembly of Unorganized Parts. J. Ind. Inf. Integr. 2025, 44, 100764. [Google Scholar] [CrossRef]
- Wang, X.; Cao, J.; Cao, Y.; Zou, F. Energy-Efficient Trajectory Planning for a Class of Industrial Robots Using Parallel Deep Reinforcement Learning. Nonlinear Dyn. 2025, 113, 8491–8511. [Google Scholar] [CrossRef]
- Celik, A.E.; Rodriguez, I.; Ayestaran, R.G.; Yavuz, S.C. Decentralized System Synchronization among Collaborative Robots via 5G Technology. Sensors 2024, 24, 5382. [Google Scholar] [CrossRef]
- Wu, M.; Zhou, X.; Li, S.; Shi, H. An Adaptive Continual Learning Method for Nonstationary Industrial Time Series Prediction. IEEE Trans. Ind. Inform. 2025, 21, 1160–1169. [Google Scholar] [CrossRef]
- Sombolestan, M.; Nguyen, Q. Adaptive-Force-Based Control of Dynamic Legged Locomotion Over Uneven Terrain. IEEE Trans. Robot. 2024, 40, 2462–2477. [Google Scholar] [CrossRef]
- Pan, Y.; Chen, C.; Li, D.; Zhao, Z. A Robot Path Tracking Method Based on Manual Guidance and Path Reinforcement Learning. Appl. Intell. 2024, 55, 197. [Google Scholar] [CrossRef]
- Ho, T.M.; Nguyen, K.K.; Cheriet, M. Converging Game Theory and Reinforcement Learning for Industrial Internet of Things. IEEE Trans. Netw. Serv. Manag. 2023, 20, 890–903. [Google Scholar] [CrossRef]
- Yang, L.; Xie, C.; Yang, H.; Zhan, H.; Qin, L. Assembly Strategy for Inclined-Holes Based on Vision and Force. Eng. Res. Express 2025, 7, 015233. [Google Scholar] [CrossRef]
- Soualhi, T.; Crombez, N.; Lombard, A.; Ruichek, Y.; Galland, S. Leveraging Motion Perceptibility and Deep Reinforcement Learning for Visual Control of Nonholonomic Mobile Robots. Robot. Auton. Syst. 2025, 189, 104920. [Google Scholar] [CrossRef]
- Khosravy, M.; Gupta, N.; Pasquali, A.; Dey, N.; Crespo, R.G.; Witkowski, O. Human-Collaborative Artificial Intelligence Along with Social Values in Industry 5.0: A Survey of the State-of-the-Art. IEEE Trans. Cogn. Dev. Syst. 2024, 16, 165–176. [Google Scholar] [CrossRef]
- Nievas, N.; Pagès-Bernaus, A.; Bonada, F.; Echeverria, L.; Domingo, X. Reinforcement Learning for Autonomous Process Control in Industry 4.0: Advantages and Challenges. Appl. Artif. Intell. 2024, 38, 2383101. [Google Scholar] [CrossRef]
- Yuan, M.; Wang, Y.; Li, L.; Chai, T.; Ang, W.T. Safety-Based Speed Control of a Wheelchair Using Robust Adaptive Model Predictive Control. IEEE Trans. Cybern. 2024, 54, 4464–4474. [Google Scholar] [CrossRef]
- Moezi, S.A.; Sedaghati, R.; Rakheja, S. Nonlinear Dynamic Modeling and Model-Based AI-Driven Control of a Magnetoactive Soft Continuum Robot in a Fluidic Environment. ISA Trans. 2024, 144, 245–259. [Google Scholar] [CrossRef] [PubMed]
- Gu, Y.; Ni, J.; Geng, Z.; Zhao, B.; Yang, H. Buoy and Winch Collaborative Control System Based on Deep Reinforcement Learning. J. Mar. Sci. Eng. 2025, 13, 326. [Google Scholar] [CrossRef]
- Choi, D.W.; Park, J.H.; Yoo, J.-H.; Ko, K. AI-Driven Adaptive Grasping and Precise Detaching Robot for Efficient Citrus Harvesting. Comput. Electron. Agric. 2025, 232, 110131. [Google Scholar] [CrossRef]
- Zakeri, E.; Spilkin, A.; Elmekki, H.; Zanuttini, A.; Kadem, L.; Bentahar, J.; Xie, W.-F.; Pibarot, P. AI-Powered Robust Interaction Force Control of a Cardiac Ultrasound Robotic System. IEEE Trans. Ind. Electron. 2025, 72, 3972–3983. [Google Scholar] [CrossRef]
- Tran, T.; Nguyen, Q.; Luu, T.; Tran, M.; Kua, J.; Hoang, T.; Dien, M. Empowering Robotic Training with Kinesthetic Learning and Digital Twins in Human–Centric Industrial Systems. J. Ind. Inf. Integr. 2025, 43, 100743. [Google Scholar] [CrossRef]
- Liu, Q.; Ji, Z.; Xu, W.; Liu, Z.; Yao, B.; Zhou, Z. Knowledge-Guided Robot Learning on Compliance Control for Robotic Assembly Task with Predictive Model. Expert Syst. Appl. 2023, 234, 121037. [Google Scholar] [CrossRef]
- Ho, T.M.; Nguyen, K.-K.; Cheriet, M. Energy Efficiency Deep Reinforcement Learning for URLLC in 5G Mission-Critical Swarm Robotics. IEEE Trans. Netw. Serv. Manag. 2024, 21, 5018–5032. [Google Scholar] [CrossRef]
- Thakuri, P.K.; Alkki, L.; Aarikka-Stenroos, L. Digital Technologies Enabling Component Reuse in Circular Value Chains: Using Digital Twin, Internet of Things and Robots in Construction and Manufacturing Sectors. RD Manag. 2024, 1–56. [Google Scholar] [CrossRef]
- Chinchilla-Romero, L.; Prados-Garzon, J.; Vasist, R.; Goordazi, M. Economic Feasibility of 5G-Based Autonomous Mobile Robots Solutions for Industry 4.0. IEEE Commun. Mag. 2024, 62, 52–59. [Google Scholar] [CrossRef]
- Jia, Y.; Liu, M.; Yang, Y.; Zhang, L. Life Cycle Assessment of Remanufacturing Technologies for Industrial Robots. EAI Endorsed Trans. Energy Web 2023, 10, e7. [Google Scholar] [CrossRef]
- Beneduce, S.; Vita, L.; Cantone, L.; Caputo, F. Machinery Regulation and Remanufacturing: A Link Between Machinery Safety and Sustainability. Machines 2024, 12, 941. [Google Scholar] [CrossRef]
- Šavija, B.; Wyatt, H.; Wu, A.; Thomas, R.; Yang, Y. Carbon Footprint of Three Different Robotic Arms. Dataset/Figure, ResearchGate. 2017. Available online: https://www.researchgate.net/figure/Carbon-footprint-of-three-different-robotic-arms_fig6_314487511 (accessed on 28 July 2025).
- Jokiel, M.; Schmitt, R. Impact of Cycle Time and Payload of an Industrial Robot on Resource Efficiency. Robotics 2021, 10, 33. [Google Scholar] [CrossRef]
- Li, Y.; Zhang, Y.; Pan, A.; Han, M.; Veglianti, E. Carbon Emission Reduction Effects of Industrial Robot Applications: Heterogeneity Characteristics and Influencing Mechanisms. Technol. Soc. 2022, 70, 102034. [Google Scholar] [CrossRef]
- Zhang, L.; Shen, Q. Carbon Emission Performance of Robot Application: Influencing Mechanisms and Heterogeneity Characteristics. Discrete Dyn. Nat. Soc. 2023, 2023, 4380575. [Google Scholar] [CrossRef]
- Lu, Y.; Liao, Z. The Influence of AI Application on Carbon Emission Intensity of Industrial Enterprises in China. Sci. Rep. 2025, 15, 12585. [Google Scholar] [CrossRef]
- Munonye, W.C. Towards Circular Economy Metrics: A Systematic Review. Circ. Econ. Sustain. 2025, 5, 122. [Google Scholar] [CrossRef]
- Shaikh, M.B.N.; Ali, M.; Chaudry, U.M.; Khan, M.K. Metrics for Sustainability and Circular Economy Practices in Context to Modern Manufacturing Environment. Circ. Econ. Sustain. 2024, 4, 2073–2091. [Google Scholar] [CrossRef]
- Shevchenko, T.; Shams Esfandabadi, Z.; Ranjbari, M.; Saidani, M.; Mesa, J.; Shevchenko, S.; Yannou, B.; Cluzel, F. Metrics in the Circular Economy: An Inclusive Research Landscape of the Thematic Trends and Future Research Agenda. Ecol. Indic. 2024, 165, 112182. [Google Scholar] [CrossRef]
- Fernández, M.d.V.; Robles, J.M.; Tolentino, M.; Andrade, S.M. Analysis of the Degree of Implementation of the Circular Economy in Europe and Spain. Cogent Bus. Manag. 2025, 12, 2499668. [Google Scholar] [CrossRef]
- Szynkiewicz, W.; Niewiadomska-Szynkiewicz, E.; Lis, K. Deep Learning of Sensor Data in Cybersecurity of Robotic Systems: Overview and Case Study Results. Electronics 2023, 12, 4146. [Google Scholar] [CrossRef]
- Xia, C.; Wang, R.; Jin, X.; Xu, C.; Li, D.; Zeng, P. Deterministic Network–Computation–Manufacturing Interaction Mechanism for AI-Driven Cyber–Physical Production Systems. IEEE Internet Things J. 2024, 11, 18852–18868. [Google Scholar] [CrossRef]
- Ford, C.J.; Li, H.; Catalano, M.G.; Bianchi, M.; Lepora, N.F. Shear-Based Grasp Control for Multifingered Under-actuated Tactile Robotic Hands. IEEE Trans. Robot. 2025, 41, 3202–3222. [Google Scholar] [CrossRef]
- Zhao, Y.; Zhu, J.; Zhang, J.; Zhang, S.; Shao, M.; Chai, Z.; Liu, Y.; Wu, J.; Wu, Z.; Zhang, J. Enhancing Grasping Diversity with a Pinch-Suction and Soft-Rigid Hybrid Multimodal Gripper. IEEE Trans. Robot. 2025, 41, 3890–3907. [Google Scholar] [CrossRef]
- Zhang, J.; Zhao, H.; Chen, K.; Fei, G.; Li, X.; Wang, Y.; Yang, Z.; Zheng, S.; Liu, S.; Ding, H. Dexterous Hand towards Intelligent Manufacturing: A Review of Technologies, Trends, and Potential Applications. Rob. Comput.-Integr. Manuf. 2025, 95, 103021. [Google Scholar] [CrossRef]
- Huang, Y.; Fan, D.; Duan, H.; Yan, D.; Qi, W.; Sun, J.; Liu, Q.; Wang, P. Human-Like Dexterous Manipulation for Anthropomorphic Five-Fingered Hands: A Review. Biomim. Intell. Robot. 2025, 5, 100212. [Google Scholar] [CrossRef]
- Chen, J.; Al-Nussairi, A.K.J.; Chyad, M.H.; Azarinfar, H.; Khosravi, M.; Jin, K.; Zhang, J. Advanced Multi-Loop Control for 4DOF Robotic Arms: Integrating Digital Twins, Neural Networks, and Model Predictive Control. Energy Rep. 2025, 13, 4261–4279. [Google Scholar] [CrossRef]
- Kang, S.; Li, T.; Yang, X.; Li, Y.; Xie, M. Neural-Learning-Based Adaptive Sliding Mode Impedance Force Control of Robotic Microinjection Systems Interacting with Viscoelastic Cells. IEEE Trans. Circuits Syst. II Express Briefs 2025, 72, 828–832. [Google Scholar] [CrossRef]
- Dao, T.-P.; Le, H.G.; Ho, N.L. Topology-Shape-Size Optimization Design Synthesis of Compliant Grippers for Robotics: A Comprehensive Review and Prospective Advances. Robotics Auton. Syst. 2025, 193, 105106. [Google Scholar] [CrossRef]
- El-Sayed, A.M. A Novel Approach to Enhancing Smart Stiffness of Soft Robotic Gripper Fingers for Wider Grasping Capability. Int. J. Intell. Robot. Appl. 2025, 9, 553–573. [Google Scholar] [CrossRef]
- Zhu, L.; Cheng, J.; Zhang, H.; Cui, Z.; Zhang, W.; Liu, Y. Autonomous and Adaptive Role Selection for Multi-Robot Collaborative Area Search Based on Deep Reinforcement Learning. IEEE Trans. Autom. Sci. Eng. 2025, 22, 16728–16740. [Google Scholar] [CrossRef]
- Nie, Z.; Chen, K.-C.; Kim, K.J. Social-Learning Coordination of Collaborative Multi-Robot Systems Achieves Resilient Production in a Smart Factory. IEEE Trans. Autom. Sci. Eng. 2025, 22, 6009–6023. [Google Scholar] [CrossRef]
- Du, J.; Liang, Y.; Tao, H.; Xu, Y.; Zhu, L.; Ding, H. Load Sharing in Distributed Collaborative Manipulation. IEEE Robot. Autom. Lett. 2025, 10, 3390–3397. [Google Scholar] [CrossRef]
- Yang, C.; Pu, C.; Zhang, Y.; Wang, T.; Wu, C.; Liu, Z. Bio-Inspired Neural Networks with Central Pattern Generators for Learning Multi-Skill Locomotion. Sci. Rep. 2025, 15, 10165. [Google Scholar] [CrossRef] [PubMed]
- Gao, H.; Xing, Z.; Chang, S.; Zhao, F.; Zhang, H.; Meng, Z.; Han, Z.; Liu, Y. Bioinspired Multifunctional Antifogging Surfaces: Progress, AI Design and Challenges. Prog. Mater. Sci. 2026, 155, 101530. [Google Scholar] [CrossRef]
- Sarker, A.; Islam, T.U.; Islam, M.R. A Review on Recent Trends of Bioinspired Soft Robotics: Actuators, Control Methods, Materials Selection, Sensors, Challenges, and Future Prospects. Adv. Intell. Syst. 2025, 7, 2400414. [Google Scholar] [CrossRef]
- Singh, A.V.; Ansari, M.H.D.; Dey, A.K.; Laux, P.; Samal, S.K.; Malgaretti, P.; Mohapatra, S.R.; Busse, M.; Suar, M.; Tisato, V.; et al. Bioinspired Soft Machines: Engineering Nature’s Grace into Future Innovations. J. Funct. Biomater. 2025, 16, 158. [Google Scholar] [CrossRef] [PubMed]
- Brahmi, B.; Ghommam, J.; Saad, M. Disturbance Observer-Based Backstepping–Super Twisting Control for Robust Trajectory Tracking in Robot Manipulators. IEEE/ASME Trans. Mechatron. 2025, 30, 1–12. [Google Scholar] [CrossRef]
- Fu, B.; Umeda, S.; Nakano, T.; Tilbury, D.M.; Barton, K. Digital Twin-Based Smart Manufacturing: Dynamic Line Reconfiguration for Disturbance Handling. IEEE Trans. Autom. Sci. Eng. 2025, 22, 14892–14905. [Google Scholar] [CrossRef]
- Villani, V.; Picone, M.; Mamei, M.; Sabattini, L. A Digital Twin-Driven Human-Centric Ecosystem for Industry 5.0. IEEE Trans. Autom. Sci. Eng. 2024, 21, 9870–9883. [Google Scholar] [CrossRef]
- Callari, T.C.; Vecellio Segate, R.; Hubbard, E.-M.; Daly, A.; Lohse, N. An Ethical Framework for Human-Robot Collaboration for the Future People-Centric Manufacturing: A Collaborative Endeavour with European Subject-Matter Experts in Ethics. Technol. Soc. 2024, 78, 102680. [Google Scholar] [CrossRef]
- Torras, C. Ethics of Social Robotics: Individual and Societal Concerns and Opportunities. Annu. Rev. Control Robot. Auton. Syst. 2024, 7, 1–18. [Google Scholar] [CrossRef]
- Howard, J.; Schulte, P. Managing Workplace AI Risks and the Future of Work. Am. J. Ind. Med. 2024, 67, 980–993. [Google Scholar] [CrossRef] [PubMed]
- Pareto, J.; Coeckelbergh, M. Social Assistive Robotics: An Ethical and Political Inquiry Through the Lens of Freedom. Int. J. Soc. Robot. 2024, 16, 1797–1808. [Google Scholar] [CrossRef]
- Tóth, A.; Nagy, L.; Kennedy, R.; Bohuš, B.; Abonyi, J.; Ruppert, T. The Human-Centric Industry 5.0 Collaboration Architecture. MethodsX 2023, 11, 102260. [Google Scholar] [CrossRef]
- Yang, C.; Huang, J.; Wu, S.; Liu, Q. Neural-Network-Based Practical Specified-Time Resilient Formation Maneuver Control for Second-Order Nonlinear Multi-Robot Systems under FDI Attacks. Neural Netw. 2025, 186, 107288. [Google Scholar] [CrossRef]
- Garg, K.; Zhang, S.; So, O.; Dawson, C.; Fan, C. Learning Safe Control for Multi-Robot Systems: Methods, Verification, and Open Challenges. Annu. Rev. Control 2024, 57, 100948. [Google Scholar] [CrossRef]
- Tejada, J.C.; Toro-Ossaba, A.; López-Gonzalez, A.; Hernandez-Martinez, E.G.; Sanin-Villa, D. A Review of Multi-Robot Systems and Soft Robotics: Challenges and Opportunities. Sensors 2025, 25, 1353. [Google Scholar] [CrossRef]
- Zhou, M.; Wang, Z.; Wang, J.; Cao, Z. Multi-Robot Collaborative Hunting in Cluttered Environments with Obstacle-Avoiding Voronoi Cells. IEEE/CAA J. Autom. Sin. 2024, 11, 1643–1655. [Google Scholar] [CrossRef]
- Ibrahim, Y.M.; Kermanshahi, S.K.; Kasmarik, K.; Hu, J. A Taxonomy-Based Survey of EM-SCA and Implications for Multi-Robot Systems. IEEE Open J. Comput. Soc. 2024, 5, 511–529. [Google Scholar] [CrossRef]
- Yang, G.; An, L.; Zhao, C. Collision/Obstacle Avoidance Coordination of Multi-Robot Systems: A Survey. Actuators 2025, 14, 85. [Google Scholar] [CrossRef]
- Zhang, R.; Ma, Q.; Zhang, X.; Xu, X.; Liu, D. A Distributed Actor-Critic Learning Approach for Affine Formation Control of Multi-Robots with Unknown Dynamics. Int. J. Adapt. Control Signal Process. 2025, 39, 803–817. [Google Scholar] [CrossRef]
- Li, R.-G.; Shi, Z.-H.; Wu, H.-N. Adaptive Neural Networks-Based Event-Triggered Formation Control for Multi-Robot Source Localization. Neurocomputing 2025, 621, 129275. [Google Scholar] [CrossRef]
- Cuadros Zegarra, E.; Barrios Aranibar, D.; Cardinale, Y. IoRT-Based Middleware for Heterogeneous Multi-Robot Systems. J. Sens. Actuator Netw. 2024, 13, 87. [Google Scholar] [CrossRef]
- Zheng, L.; Zhou, Y. Event-Triggered Distributed Consensus Control of Heterogeneous Multi-Agent System under Communication and Actuator Faults. Appl. Math. Comput. 2025, 487, 129077. [Google Scholar] [CrossRef]
- Yang, C.; Wang, S.; Zhang, S.; Lin, S.; Huang, B. A Class of Distributed Online Aggregative Optimization in Unknown Dynamic Environment. Mathematics 2024, 12, 2460. [Google Scholar] [CrossRef]
- An, L.; Yang, G.-H.; Wasly, S. Obstacle Avoidance in Distributed Optimal Coordination of Multirobot Systems: A Trajectory Planning and Tracking Strategy. IEEE Trans. Control Netw. Syst. 2024, 11, 1335–1344. [Google Scholar] [CrossRef]
- Slim, M.; Daher, N.; Elhajj, I.H. Dynamic Bandwidth Allocation for Collaborative Multi-Robot Systems Based on Task Execution Measures. J. Intell. Robot. Syst. 2024, 110, 114. [Google Scholar] [CrossRef]
- Sousa, J.; Brandau, B.; Darabi, R.; Sousa, A.; Brueckner, F.; Reis, A.; Reis, L.P. Artificial Intelligence for Control in Laser-Based Additive Manufacturing: A Systematic Review. IEEE Access 2025, 13, 30845–30860. [Google Scholar] [CrossRef]
- 5G-ACIA. 5G Non-Public Networks for Industrial Scenarios, 2nd ed.; 5G Alliance for Connected Industries and Automation: Frankfurt, Germany, 2024. [Google Scholar]
- Fazilat, M.; Zioui, N. Quantum-Inspired Sliding-Mode Control to Enhance the Precision and Energy Efficiency of an Articulated Industrial Robotic Arm. Robotics 2025, 14, 14. [Google Scholar] [CrossRef]
- Hirsi, A.; Audah, L.; Salh, A.; Alhartomi, M.; Sun, Z.; Hammoodi, A.; Ahmed, S. Artificial Intelligence Performance Evaluation for URLLC of Industrial IoT Applications: A Review, Open Challenges and Future Directions. Phys. Commun. 2025, 72, 102712. [Google Scholar] [CrossRef]
- European Commission; Breque, M.; De Nul, L.; Petridis, A. Industry 5.0: Towards a Sustainable, Human-Centric and Resilient European Industry; Publications Office of the European Union: Luxembourg, 2021. [Google Scholar]
- Cimino, A.; Longo, F.; Nicoletti, L.; Solina, V. Simulation-Based Digital Twin for Enhancing Human-Robot Collaboration in Assembly Systems. J. Manuf. Syst. 2024, 77, 903–918. [Google Scholar] [CrossRef]
- Hasani, N.; Hosseini, A.; Ashjazadeh, Y.; Diederichs, V.; Ghotb, S.; Riggio, M.; Hansen, E.; Nasir, V. Outlook on Human-Centred Design in Industry 5.0: Towards Mass Customisation, Personalisation, Co-Creation, and Co-Production. Int. J. Sustain. Eng. 2025, 18, 1. [Google Scholar] [CrossRef]
- Cimino, A.; Elbasheer, M.; Longo, F.; Mirabelli, G.; Solina, V.; Veltri, P. Automatic Simulation Models Generation in Industrial Systems: A Systematic Literature Review and Outlook towards Simulation Technology in the Industry 5.0. J. Manuf. Syst. 2025, 80, 859–882. [Google Scholar] [CrossRef]
- Lu, Y.; Sigov, A.; Ratkin, L.; Ivanov, L.A.; Zuo, M. Quantum Computing and Industrial Information Integration: A Review. J. Ind. Inf. Integr. 2023, 35, 100511. [Google Scholar] [CrossRef]
- ISO/TS 15066:2016; Robots and Robotic Devices—Collaborative Robots. International Organization for Standardization: Geneva, Switzerland, 2016.
- Groover, M.P.; Weiss, M.; Nagel, R.N.; Odrey, N.G. Industrial Robotics: Technology, Programming, and Applications; McGraw-Hill: New York, NY, USA, 1986. [Google Scholar]
- Craig, J.J. Introduction to Robotics: Mechanics and Control, 1st ed.; Addison-Wesley: Reading, MA, USA, 1986. [Google Scholar]
- Barbera, T.; Fitzgerald, M.L.; Albus, J.S.; Haynes, L.S. RCS: The NBS Real-Time Control System. Natl. Bur. Stand. (NBS) Tech. Rep. 1984. Available online: https://tsapps.nist.gov/publication/get_pdf.cfm?pub_id=820167 (accessed on 28 July 2025).
- Ceccarelli, M. A Brief History of Robotics in the 20th Century. In Proceedings of the 12th IFToMM World Congress, Besançon, France, 17–21 June 2007; pp. 1–12. [Google Scholar]
- Kaynak, O.; Erbatur, K.; Erbatur, E. The Design and Implementation of a Hybrid Intelligent Controller for a Robot Manipulator. In Proceedings of the IECON ’95—21st Annual Conference IEEE Industrial Electronics Society, Orlando, FL, USA, 6–10 November 1995. [Google Scholar]
- de Silva, C.W. Applications of Fuzzy Logic in the Control of Robotic Manipulators. Fuzzy Sets Syst. 1995, 70, 223–234. [Google Scholar] [CrossRef]
- Zadeh, L.A. The Role of Fuzzy Logic in Modeling, Identification and Control. Model. Identif. Control 1994, 15, 191–203. [Google Scholar] [CrossRef]
- Siciliano, B.; Sciavicco, L. Modelling and Control of Robot Manipulators; Springer: London, UK, 2000. [Google Scholar]
- Mayne, D.Q.; Rawlings, J.B.; Rao, C.V.; Scokaert, P.O.M. Constrained Model Predictive Control: Stability and Optimality. Automatica 2000, 36, 789–814. [Google Scholar] [CrossRef]
- Maciejowski, J.M. Predictive Control with Constraints; Prentice Hall: Harlow, UK, 2002. [Google Scholar]
- Camacho, E.F.; Bordons, C. Model Predictive Control, 2nd ed.; Springer: London, UK, 2004. [Google Scholar]
- Kober, J.; Bagnell, J.A.; Peters, J. Reinforcement Learning in Robotics: A Survey. Int. J. Robot. Res. 2013, 32, 1238–1274. [Google Scholar] [CrossRef]
- Goodfellow, I.; Bengio, Y.; Courville, A. Deep Learning; MIT Press: Cambridge, MA, USA, 2016. [Google Scholar]
- Dimiduk, D.M.; Holm, E.A.; Niezgoda, S.R. Perspectives on the Impact of Machine Learning, Deep Learning, and Artificial Intelligence on Materials, Processes, and Structures Engineering. Integr. Mater. Manuf. Innov. 2018, 7, 157–172. [Google Scholar] [CrossRef]
- Schmidhuber, J. Deep Learning in Neural Networks: An Overview. Neural Netw. 2015, 61, 85–117. [Google Scholar] [CrossRef]
- Han, D.; Mulyana, B.; Stankovic, V.; Cheng, S. A Survey on Deep Reinforcement Learning Algorithms for Robotic Manipulation. Sensors 2023, 23, 3762. [Google Scholar] [CrossRef] [PubMed]
- Deloitte. In the Quantum Future, Expect the Unexpected. WSJ Custom Content/Deloitte Insights. 2024. Available online: https://deloitte.wsj.com/cio/in-the-quantum-future-expect-the-unexpected-fad47214?utm_source=chatgpt.com (accessed on 28 July 2025).
- BCG. The Long-Term Forecast for Quantum Computing Still Looks Bright. Boston Consulting Group Perspective. 2024. Available online: https://www.bcg.com/publications/2024/long-term-forecast-for-quantum-computing-still-looks-bright?utm_source=chatgpt.com (accessed on 28 July 2025).
- Geda, M.W.; Tang, Y.M. Adaptive Hybrid Quantum-Classical Computing Framework for Deep Space Exploration Mission Applications. J. Ind. Inf. Integr. 2025, 44, 100803. [Google Scholar] [CrossRef]

| Method | Precision (µm) | Cycle-Time (ms) | Energy (J/cycle) | Typical Application Domain | Key Refs. |
|---|---|---|---|---|---|
| PID (baseline) | 50 ± 12 | 25 ± 6 | 12.0 ± 2.3 | Spot-welding, palletizing | [41,42] |
| Model Predictive Control | 25 ± 7 | 28 ± 8 | 10.1 ± 1.8 | High-speed assembly | [45,65,66] |
| Adaptive Gain Scheduling | 20 ± 6 | 26 ± 7 | 9.0 ± 1.9 | Force-controlled deburring | [14,57] |
| Hybrid PID + AI (ANN/FLC) | 15 ± 5 | 24 ± 6 | 8.1 ± 1.5 | Flexible pick-and-place | [27,59,67] |
| Deep RL Policy Control | 12 ± 4 | 22 ± 5 | 7.4 ± 1.2 | Agile bin-picking, HRC | [36,54,68] |
| Digital Twin-Assisted MPC | 10 ± 3 | 20 ± 4 | 6.5 ± 1.1 | Re-entrant flow lines | [29,69] |
| Bio-inspired Evolutionary Control | 18 ± 6 | 30 ± 9 | 9.2 ± 2.0 | Redundant manipulators | [40,70] |
| Quantum-inspired Optimization | 8 ± 3 | 19 ± 5 | 6.0 ± 1.0 | Multi-robot coordination | [20,71] |
| Dimension | KPI | Typical Value | Source |
|---|---|---|---|
| Material circularity | Material reuse intensity (kg year−1 per robot) | 800–1200 kg; 60–80% raw material savings vs. new build | [83] |
| Operational emissions | Carbon intensity (kg CO2-eq h−1, amortized 10 yr) | ~2.2 | [85] |
| Resource efficiency | Energy–payload–cycle factor (% savings) | up to 15% vs. fixed speed | [86] |
| Macro impact | National CO2 reduction per +10k robots (%) | 0.8–1.4 vs. pre-automation | [87,88] |
| AI leverage | Δ carbon intensity per +1% AI adoption (%) | −0.04 vs. static MES | [89] |
| Circular-economy adoption | Metric standardization gap (%) | 10–15% adoption shortfall | [90,91,92] |
| Regional implementation | Secondary materials utilization gap (%) | 32% (Spain) | [93] |
| Challenge/Technology | AI/DRL | Digital Twins | 5G/URLLC | Quantum-Inspired | Bio-Inspired Control |
|---|---|---|---|---|---|
| Scalability | (compute load) | ✔ | ✔ | (prototype HPC) | (cost) |
| Energy Efficiency | (high demand) | – | ✔ | ✔ | ✔ |
| Safety | ✔ | ✔ | ✔ | – | ✔ |
| Cybersecurity | (needs shielding) | ✔ | (protocol gaps) | ✔ | – |
| Ethics | – | – | – | – | ✔ |
| AM Integration | ✔ | ✔ | ✔ | (limited deployment) | (integration issues) |
= limited/prototype or constrained by cost, compute, or standardization gaps; – = unproven or insufficient evidence. Representative references: Scalability [20,30,31,40,45,72]; Energy [19,63,74,80]; Safety [46,47,48,50,120]; Cybersecurity [21,22,24,26,34,64,95]; Ethics [1,2,114,116,117]; AM Integration [27,28,29,30,31,32].Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Urrea, C. Artificial Intelligence-Driven and Bio-Inspired Control Strategies for Industrial Robotics: A Systematic Review of Trends, Challenges, and Sustainable Innovations Toward Industry 5.0. Machines 2025, 13, 666. https://doi.org/10.3390/machines13080666
Urrea C. Artificial Intelligence-Driven and Bio-Inspired Control Strategies for Industrial Robotics: A Systematic Review of Trends, Challenges, and Sustainable Innovations Toward Industry 5.0. Machines. 2025; 13(8):666. https://doi.org/10.3390/machines13080666
Chicago/Turabian StyleUrrea, Claudio. 2025. "Artificial Intelligence-Driven and Bio-Inspired Control Strategies for Industrial Robotics: A Systematic Review of Trends, Challenges, and Sustainable Innovations Toward Industry 5.0" Machines 13, no. 8: 666. https://doi.org/10.3390/machines13080666
APA StyleUrrea, C. (2025). Artificial Intelligence-Driven and Bio-Inspired Control Strategies for Industrial Robotics: A Systematic Review of Trends, Challenges, and Sustainable Innovations Toward Industry 5.0. Machines, 13(8), 666. https://doi.org/10.3390/machines13080666