4.1. Simulation Verification
To validate the effectiveness of the proposed algorithm, a comprehensive simulation procedure was conducted, emulating the practical calibration scenario of the subreflector actuator. The simulation setup follows the theoretical framework described in
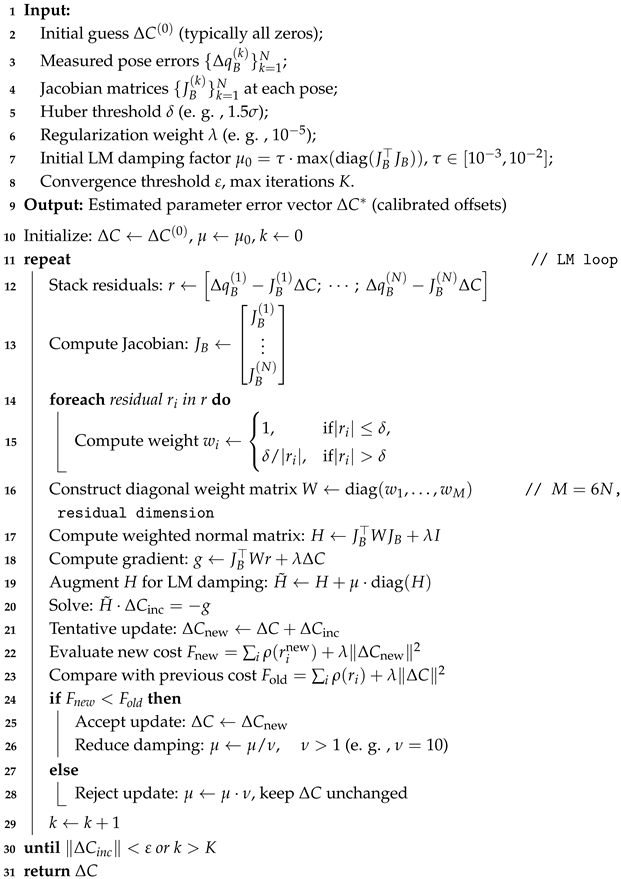
Section 3, with synthetic pose errors generated using the linearized error model, additive Gaussian noise, and occasional outliers. The robust LM algorithm implements the Huber-weighted cost and
L2-regularized update rule exactly as specified, ensuring theory-consistent validation. In all simulation trials, both the traditional LM and the robust LM algorithms converged from the same initial conditions.
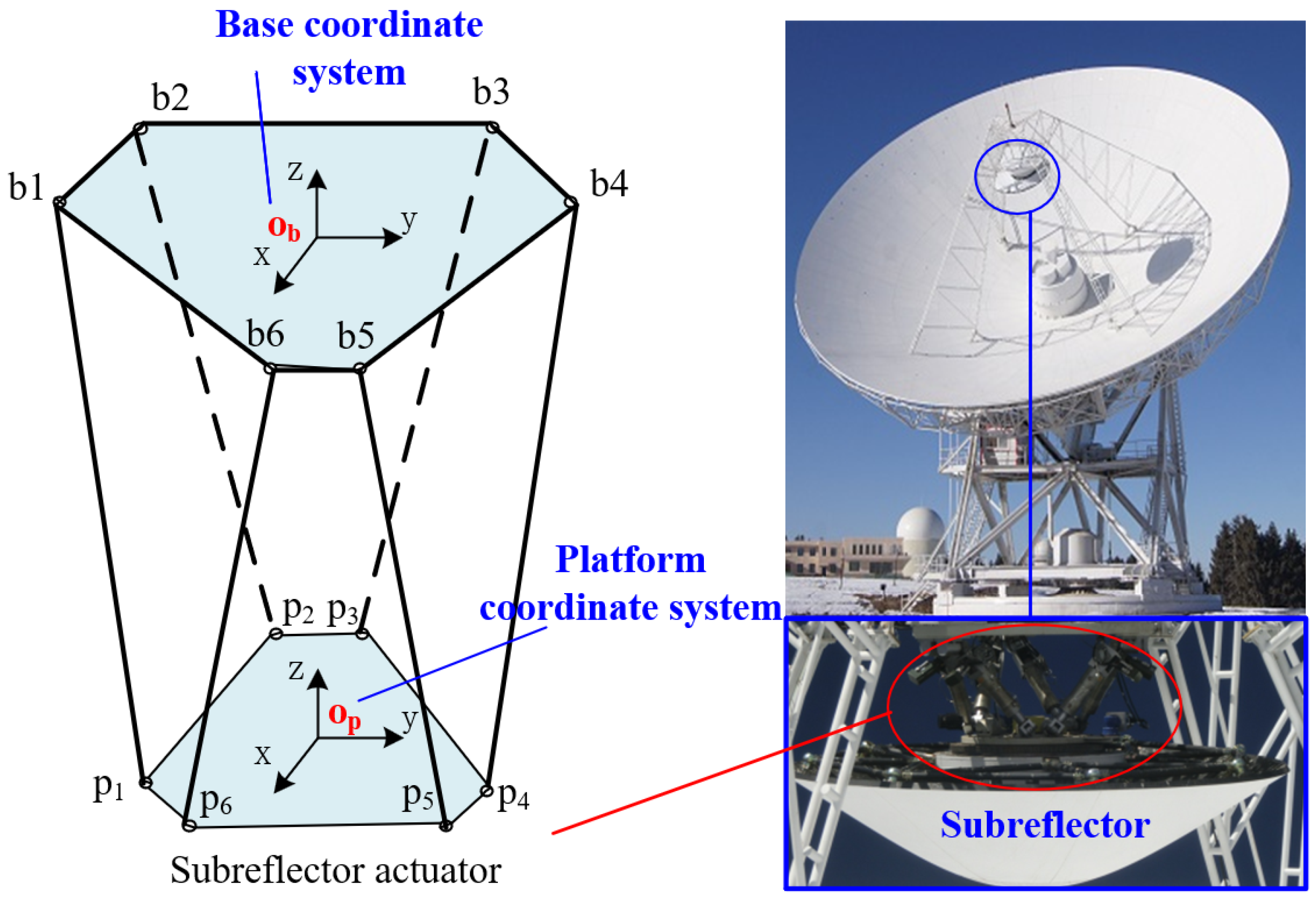
The geometric configuration and nominal kinematic parameters of the actuator are detailed in
Table 1, while the corresponding motion workspace bounds are defined in
Table 2. To ensure reliable identification of the 42 error components in the kinematic model, 50 poses within the reachable workspace were generated, and 30 additional poses were used for validation. Measurement poses are uniformly distributed within the portion of the subreflector actuator’s workspace that is visible to the external measurement system, using Latin Hypercube Sampling to ensure representative and space-filling coverage. This visibility-constrained region was used to avoid occlusion and maximize measurement quality. For each pose, the actuator’s forward kinematics is computed using the ground-truth parameters, after which controlled noise is injected to simulate sensor uncertainty and structural variability. The noise consists of a combination of white Gaussian noise and impulse noise.
Calibration was performed under four different workspace scales: 1,
,
, and
of the whole reachable workspace.
Table 3 summarizes the simulation results under various workspace scales. As the workspace scale decreases, both position and orientation errors increase for both methods. However, the robust LM method produces significantly smaller errors compared to the traditional LM method, especially in the smaller workspace scales.
The standard deviation of the position and orientation errors increases substantially for traditional LM when moving to a workspace (from 0.0475 mm to 0.1830 mm in position, and from 0.0061° to 0.0217° in orientation). For the robust LM, these increases are far smaller (from 0.0164 mm to 0.0945 mm and 0.0017° to 0.0099°). This reflects the greater stability and repeatability of the robust method, suggesting it is less susceptible to “fluctuating fits” due to local minima or data inconsistency.
Smaller workspaces often lead to near-singular Jacobians. While LM handles this partially via damping, the robust LM further improves conditioning by modulating weight matrices dynamically and applying ridge regularization. This results in better-conditioned normal equations and explains why the robust LM converges more reliably. Traditional LM may either stagnate or produce unstable parameter updates in such cases, whereas the robust LM explicitly includes regularization, which acts as a prior to penalize large parameter magnitudes. This reduces overfitting tendencies, and explains why robust LM maintains better generalization across workspace scales.
Although the workspace shrinkage is the main source of accuracy degradation here, it effectively simulates scenarios where measurement noise or sensor bias dominate due to limited excitation. In such regimes, robust LM’s weighting mechanism naturally down-weights the influence of unstable directions in the residual space, behaving similarly to a noise filter. Traditional LM, in contrast, treats all residuals equally and is more prone to be skewed by small errors in low-excitation directions.
The calibration performance was further evaluated under varying levels of synthetic measurement noise to assess the robustness of the proposed algorithm at a workspace. Specifically, three representative noise levels were introduced to simulate real-world uncertainties in sensor readings and structural perturbations. Position noise was applied with a Gaussian distribution within the ranges of ±0.01 mm, ±0.05 mm, and ±0.1 mm, while the corresponding orientation noise was added with a Gaussian distribution within the ranges of ±0.001°, ±0.005°, and ±0.01°, respectively. Additionally, an impulse noise of 0.5 mm for position and 0.05° for orientation was added to each data set with a 5% probability.
Table 4 presents a comparative evaluation of the calibration performance under varying levels of simulated measurement noise. Both the traditional LM and the proposed robust LM methods were tested across three noise levels, ranging from low to high, to emulate real-world measurement uncertainties in position and orientation.
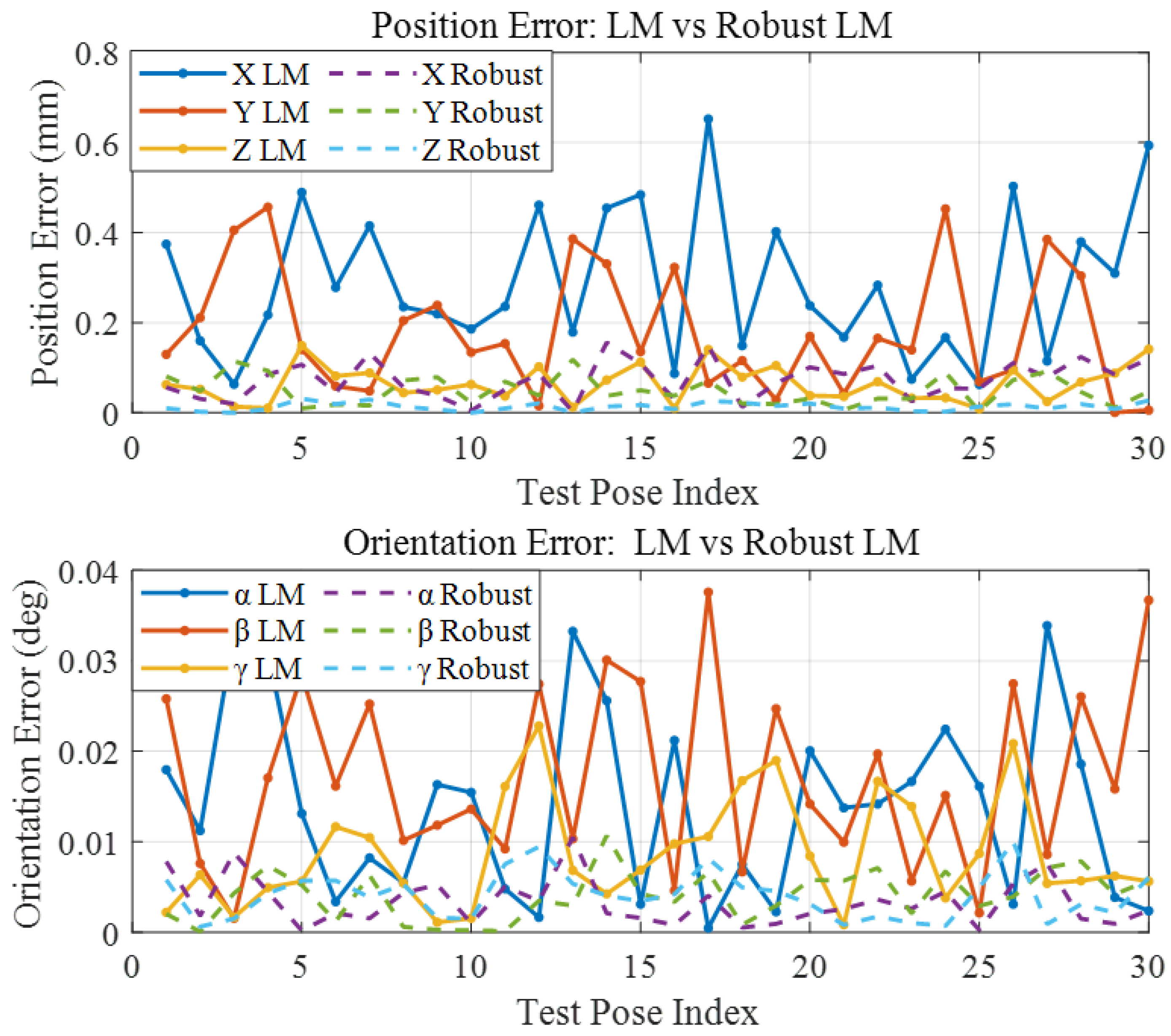
As shown in
Figure 2, at the lowest noise level
, the robust LM algorithm achieves exceptionally high accuracy, with a mean position error of only 0.0078 mm and a mean orientation error of 0.0008°. In comparison, the traditional LM records 0.1253 mm and 0.0126°, respectively. This translates to an improvement of approximately 93.8% in position accuracy and 93.7% in orientation accuracy, confirming the superior precision of the robust approach even in well-conditioned noise scenarios. Furthermore, the robust LM algorithm demonstrates a strong capability in effectively managing outliers, further enhancing its reliability in practical applications.
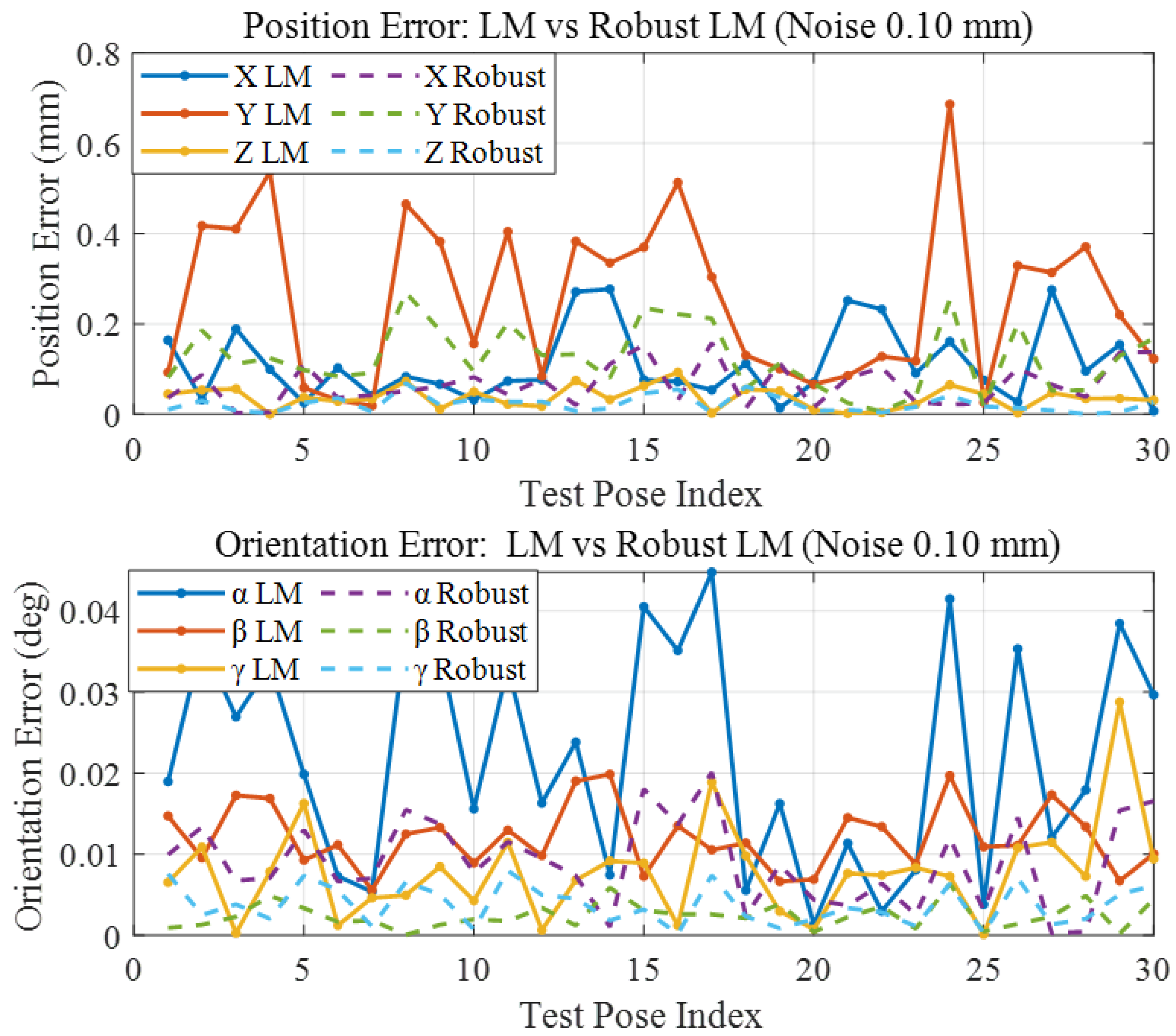
As shown in
Figure 3, as noise levels increase to
, the error gap between the two methods becomes even more evident. The position error for the traditional LM grows significantly to 0.3835 mm, while the robust LM maintains a much lower error of 0.0973 mm, reflecting a 74.6% reduction. Similarly, the orientation error is reduced from 0.0273° to 0.0076°, an improvement of 72.2%. These results highlight the noise suppression capability of the robust algorithm, particularly through the influence-limiting behavior of the Huber loss.
As shown in
Figure 4, even under the most challenging condition tested (±0.1 mm noise, ±0.01° noise, and 5% outliers), the robust LM still converged and produced a mean residual positioning error of 0.1513 mm, while the traditional LM yielded 0.3985 mm. This corresponds to a deviation from the true parameters on the order of a few percent for the robust LM, compared to tens of percent for the traditional LM.
Traditional LM minimizes squared residuals, giving disproportionate influence to large errors, especially under high noise. In contrast, robust LM employs the Huber loss, which:
- (1)
Weights small residuals quadratically for efficiency.
- (2)
Weights large residuals linearly to limit their influence.
This allows robust LM to act as a soft outlier detector, down-weighting contaminated samples rather than letting them dominate the parameter update, which explains its better behavior at high noise.
As measurement noise increases, Jacobians derived from noisy data can become ill-conditioned, leading to unstable updates or even divergence in the traditional LM algorithm due to the absence of inherent regularization mechanisms. In contrast, the proposed robust LM approach incorporates regularization, which introduces numerical damping and significantly improves matrix conditioning. When combined with the adaptive weighting of the Huber loss function, this strategy ensures stable and reliable convergence, even in the presence of substantial noise and outlier contamination in the residuals. The additional weight updates and regularization terms introduce negligible computational overhead, and the robust algorithm’s convergence speed was similar to that of conventional LM in our tests, preserving near real-time performance. These findings underscore the robustness, adaptability, and strong generalization capability of the proposed method.
4.2. Experimental Results
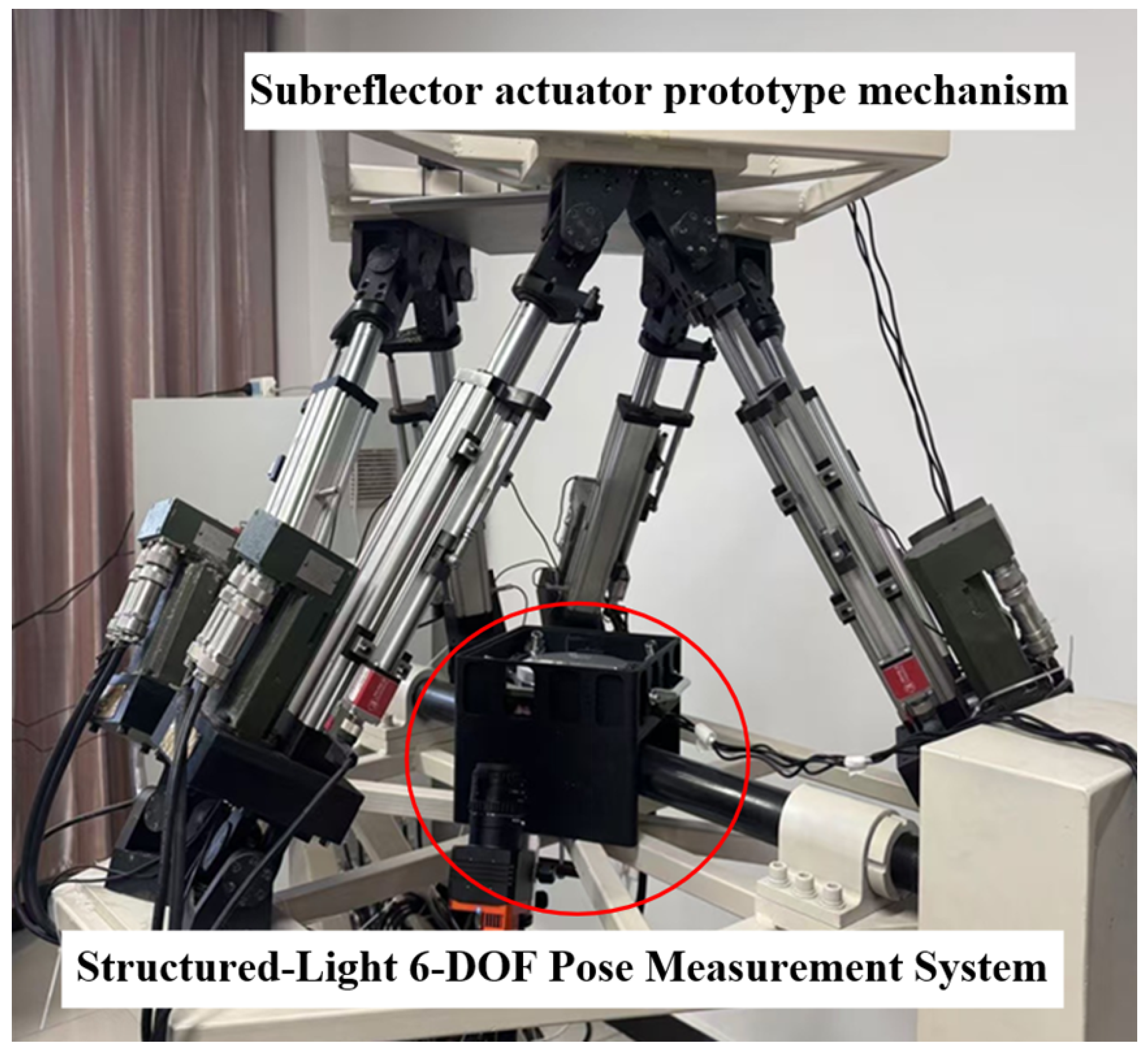
The subreflector actuator prototype mechanism and the structured-light 6-DOF pose a measurement system as shown in
Figure 5. The system is composed of four 650 nm laser modules arranged in intersecting pairs, a mirror, a planar retroreflective target, and a camera. The laser projector mirror and camera were mounted on the base platform, while a planar retroreflective target was mounted rigidly on the movable platform. As the movable platform executed controlled translations or rotations, the laser spots moved on the target. The system projects a pre-calibrated pattern of laser spots onto a retro-reflective target attached to the subreflector and uses multiple high-resolution cameras to reconstruct the full 6-DOF pose. The effective measurement range of the system spans ± 30 mm along the x, y, and z axes, and ±4° in rotation about each of the x, y, and z axes. Repeated measurements under static conditions showed translational deviation RMS = 0.05 mm, while the angular error inferred from laser spot displacement remained below 0.001°.
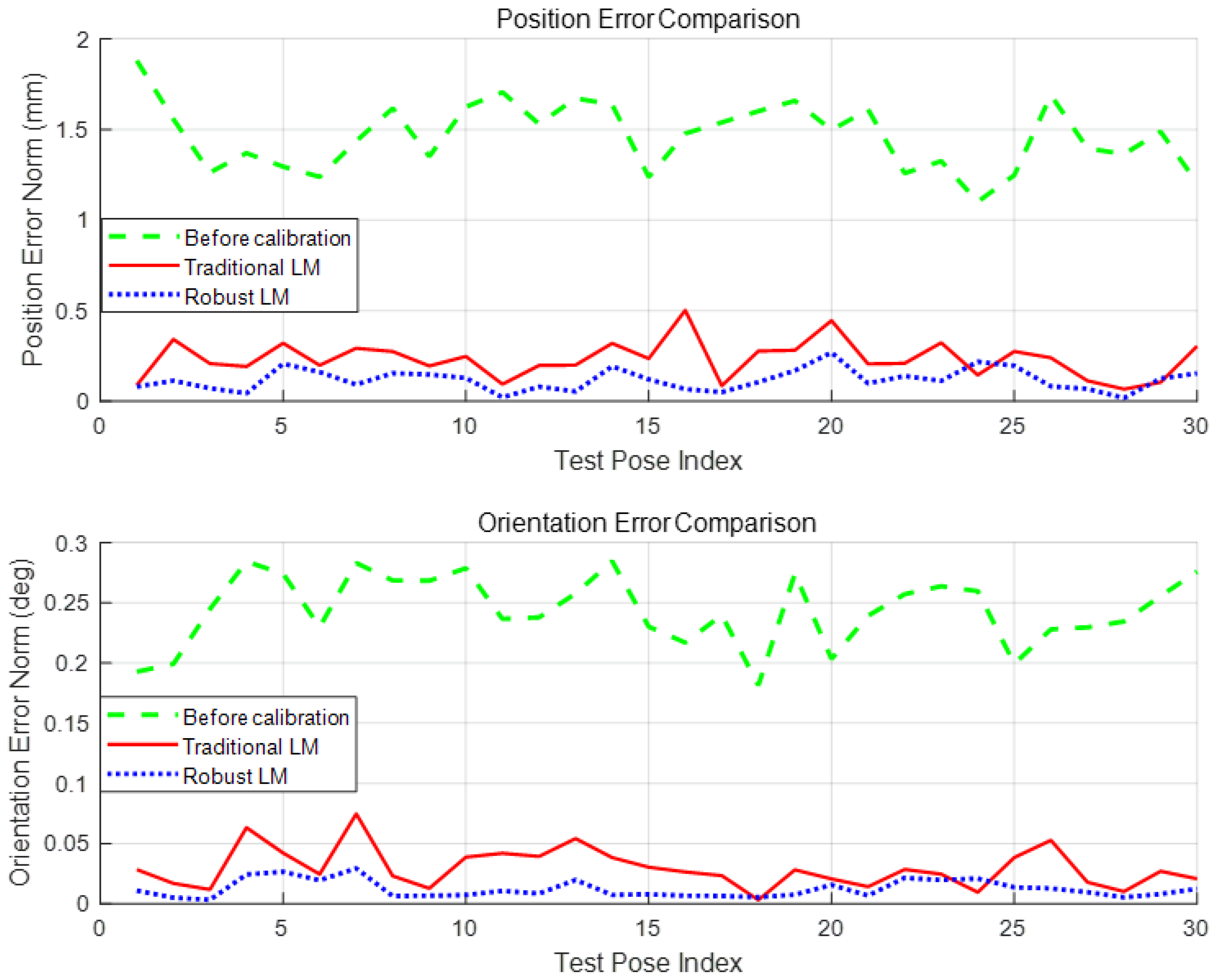
The kinematic calibration experiment was conducted based on a nominal set of measurement poses. The position and orientation errors before and after calibration are summarized in
Table 5 and
Table 6, and illustrated in
Figure 6.
Prior to calibration, the mean position error was 1.4626 mm. After applying the robust LM algorithm, this was reduced to 0.1182 mm, representing a 91.9% improvement. In comparison, the traditional LM approach achieved a higher mean error of 0.2327 mm, nearly twice that of the robust method. The maximum position error decreased from 1.8804 mm to 0.2690 mm using robust LM, whereas traditional LM reduced it to 0.5024 mm.
For orientation, the mean error before calibration was 0.2444°. Robust LM reduced this to 0.0121°—a 95.0% reduction—while traditional LM converged to 0.0295°. Similarly, the maximum orientation error was reduced from 0.2847° to 0.0293° under the robust approach.
Overall, the robust LM algorithm consistently outperformed the traditional LM across all evaluated metrics. Its ability to suppress both positional and angular deviations, while maintaining low variance, makes it a highly reliable and accurate solution for high-precision 6-DOF calibration tasks under conditions of modeling uncertainty and measurement noise.


 ,
, 


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}